
Thomson–Einstein’s Tea Leaf Paradox Revisited: Aggregation in Rings



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Computational Fluid Dynamics
2.2. Computational Mesh Study
2.3. Particle Modeling
2.4. Tea Leaf Settling Analysis
2.5. Tea Leaf Particle Characterization
3. Results and Discussion
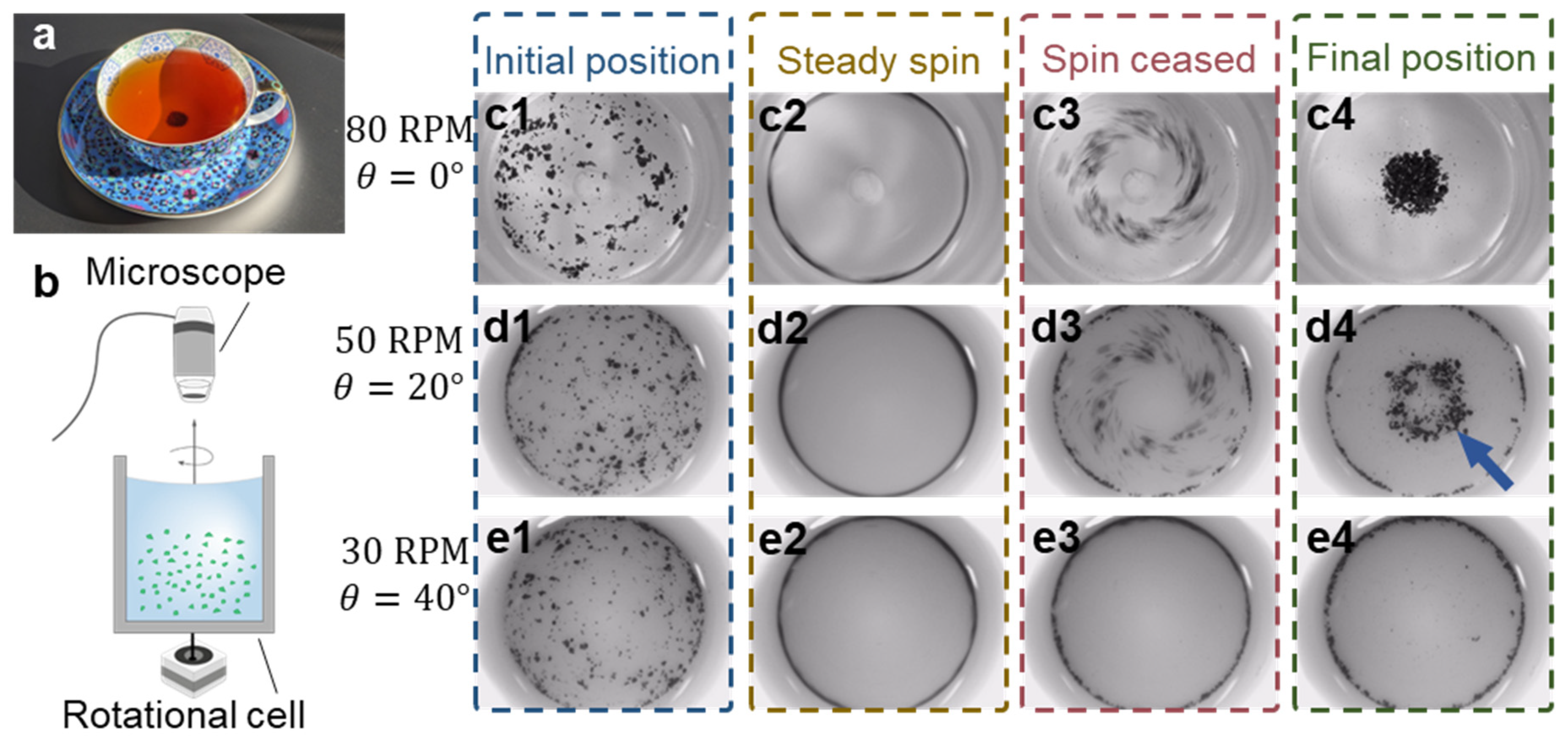
3.1. Experimental Study
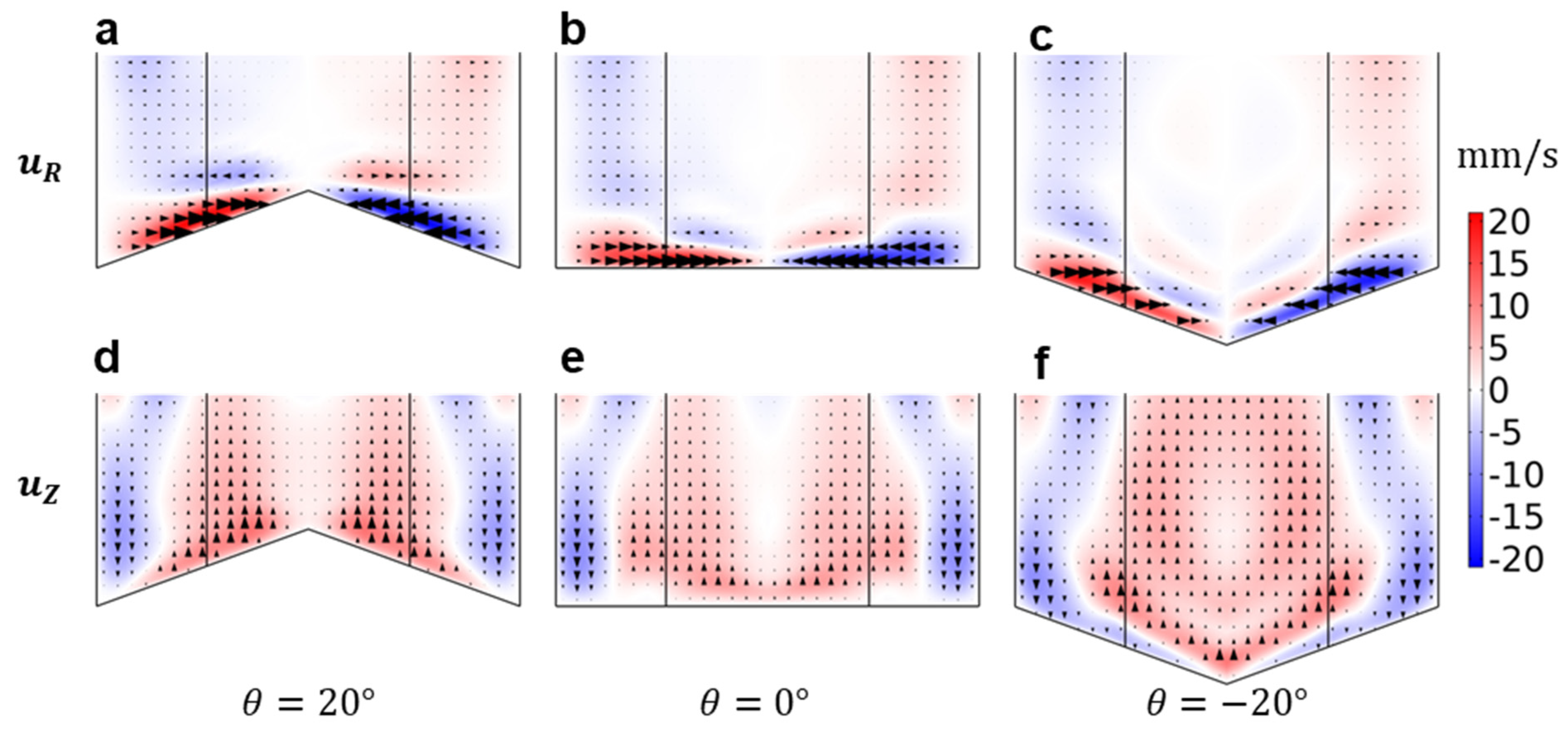
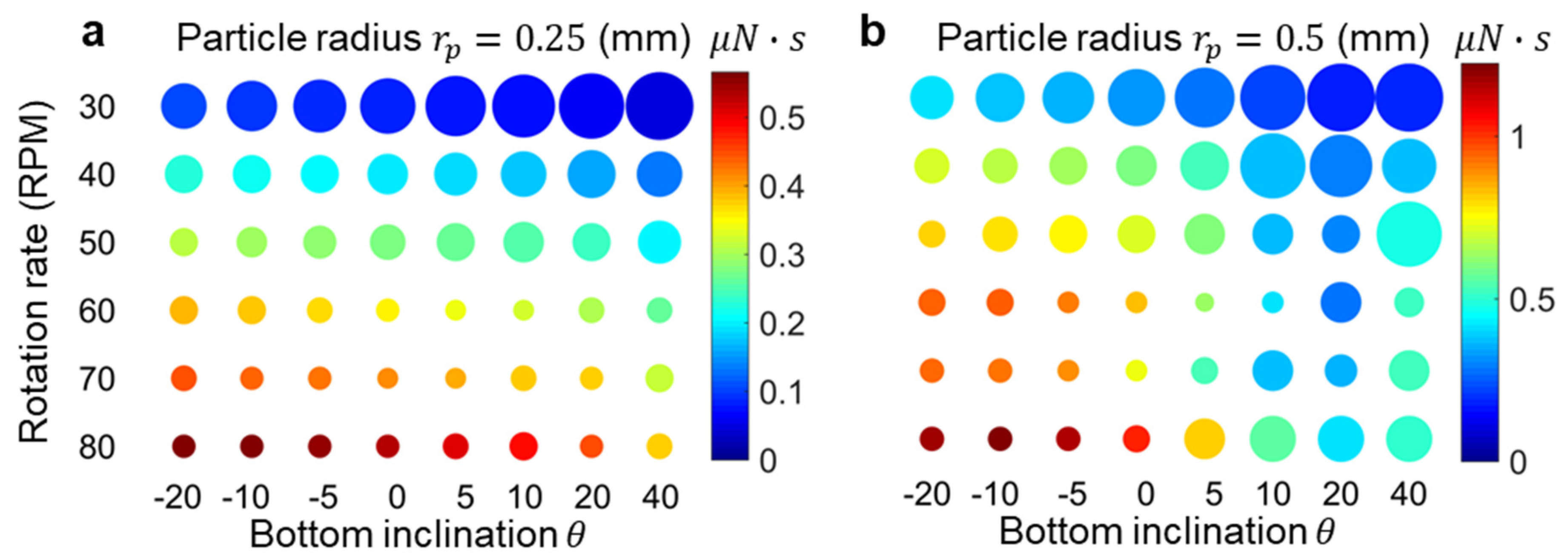
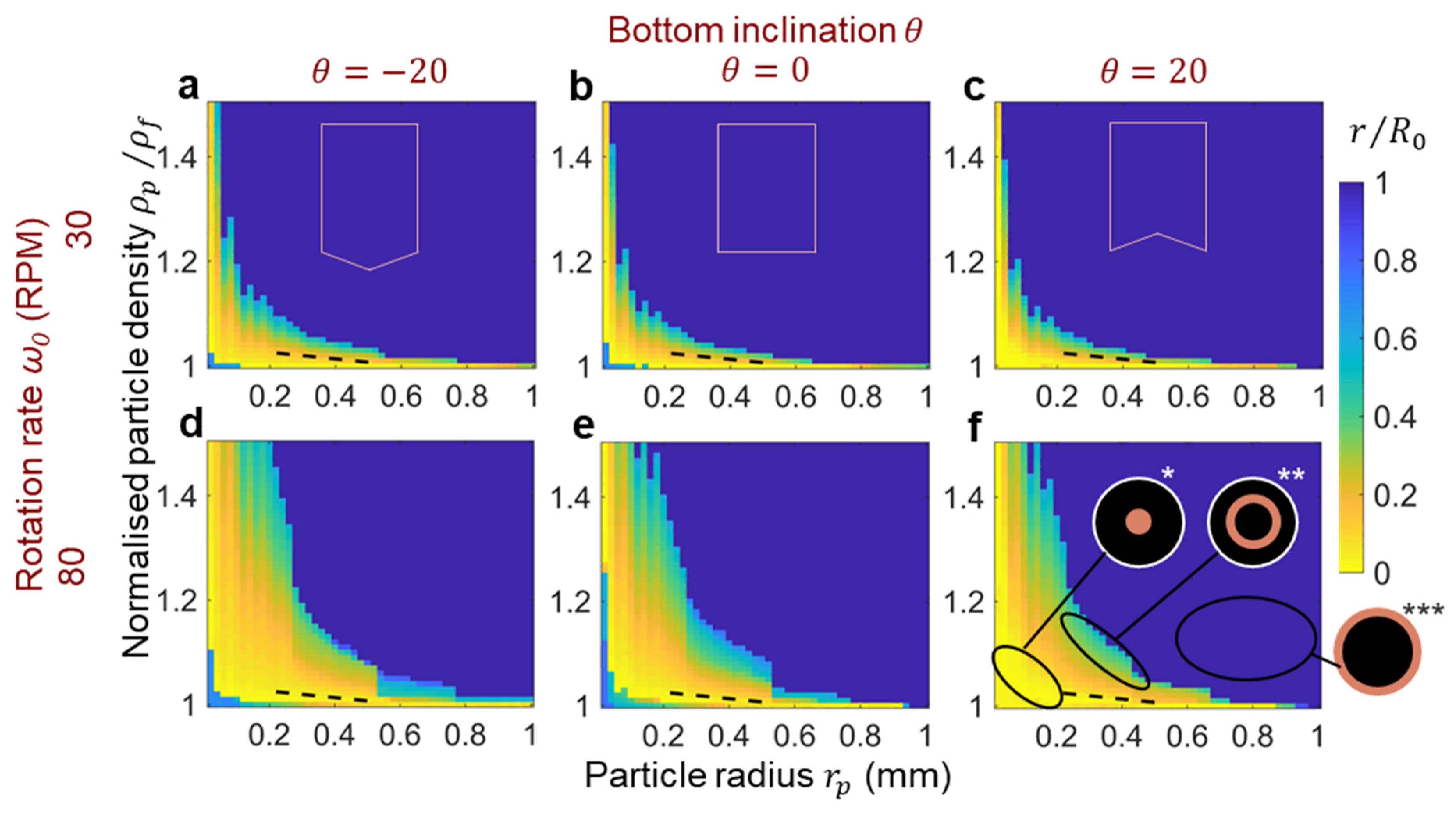
3.2. Computational Analysis
3.3. Discussion and Outlook
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Einstein, A. The Cause of the Formation of Meanders in the Courses of Rivers and of the So-Called Baer’s Law. Die Naturwissenschaften 1926, 14, 223. [Google Scholar] [CrossRef]
- Thomson, J. Collected Papers in Physics and Engineering; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Botchwey, E.A.; Pollack, S.R.; Levine, E.M.; Johnston, E.D.; Laurencin, C.T. Quantitative Analysis of Three-Dimensional Fluid Flow in Rotating Bioreactors for Tissue Engineering. J. Biomed. Mater. Res. A 2004, 69, 205. [Google Scholar] [CrossRef] [PubMed]
- Saitou, Y.; Ishihara, O. Dynamic Circulation in a Complex Plasma. Phys. Rev. Lett. 2013, 111, 1. [Google Scholar] [CrossRef] [PubMed]
- Saitou, Y.; Ishihara, O. Tempest in a Glass Tube: A Helical Vortex Formation in a Complex Plasma. J. Plasma Phys. 2014, 80, 869. [Google Scholar] [CrossRef]
- Arifin, D.R.; Yeo, L.Y.; Friend, J.R. Microfluidic Blood Plasma Separation via Bulk Electrohydrodynamic Flows. Biomicrofluidics 2007, 1, 014103. [Google Scholar] [CrossRef] [PubMed]
- Tallapragada, P.; Hasabnis, N.; Katuri, K.; Sudarsanam, S.; Joshi, K.; Ramasubramanian, M. Scale Invariant Hydrodynamic Focusing and Sorting of Inertial Particles by Size in Spiral Micro Channels. J. Micromech. Microeng. 2015, 25, 84013. [Google Scholar] [CrossRef]
- Schrimpf, M.; Esteban, J.; Warmeling, H.; Färber, T.; Behr, A.; Vorholt, A.J. Taylor-Couette Reactor: Principles, Design, and Applications. AIChE J. 2021, 67, e17228. [Google Scholar] [CrossRef]
- Kim, J.S.; Kim, D.H.; Gu, B.; Kim, D.Y.; Yang, D.R. Simulation of Taylor-Couette Reactor for Particle Classification Using CFD. J. Cryst. Growth 2013, 373, 106. [Google Scholar] [CrossRef]
- Gossett, D.R.; Tse, H.T.K.; Dudani, J.S.; Goda, K.; Woods, T.A.; Graves, S.W.; Di Carlo, D. Inertial Manipulation and Transfer of Microparticles across Laminar Fluid Streams. Small 2012, 8, 2757. [Google Scholar] [CrossRef] [PubMed]
- Tanyeri, M.; Schroeder, C.M. Manipulation and Confinement of Single Particles Using Fluid Flow. Nano Lett. 2013, 13, 2357. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Ji, M.; Yu, N.; Zhao, C.; Xue, G.; Fu, W.; Qiao, X.; Zhang, Y.; Chou, X.; Geng, W. Enhanced Detection in Droplet Microfluidics by Acoustic Vortex Modulation of Particle Rings and Particle Clusters via Asymmetric Propagation of Surface Acoustic Waves. Biosensors 2022, 12, 399. [Google Scholar] [CrossRef] [PubMed]
- Gu, Y.; Chen, C.; Mao, Z.; Bachman, H.; Becker, R.; Rufo, J.; Wang, Z.; Zhang, P.; Mai, J.; Yang, S.; et al. Acoustofluidic Centrifuge for Nanoparticle Enrichment and Separation. Sci. Adv. 2021, 7, eabc0467. [Google Scholar] [CrossRef] [PubMed]
- Haynes, W.M. CRC Handbook of Chemistry and Physics; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Devendran, C.; Albrecht, T.; Brenker, J.; Alan, T.; Neild, A. The Importance of Travelling Wave Components in Standing Surface Acoustic Wave (SSAW) Systems. Lab Chip 2016, 16, 3756. [Google Scholar] [CrossRef] [PubMed]
- Muller, P.B.; Barnkob, R.; Jensen, M.J.H.; Bruus, H. A Numerical Study of Microparticle Acoustophoresis Driven by Acoustic Radiation Forces and Streaming-Induced Drag Forces. Lab Chip 2012, 12, 4617. [Google Scholar] [CrossRef] [PubMed]
- Saffman, P.G. The Lift on a Small Sphere in a Slow Shear Flow. J. Fluid Mech. 1965, 22, 385. [Google Scholar] [CrossRef]
- Goldman, A.J.; Cox, R.G.; Brenner, H. Slow Viscous Motion of a Sphere Parallel to a Plane Wall-II Couette Flow. Chem. Eng. Sci. 1967, 22, 653. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolesnik, K.; Pham, D.Q.L.; Fong, J.; Collins, D.J. Thomson–Einstein’s Tea Leaf Paradox Revisited: Aggregation in Rings. Micromachines 2023, 14, 2024. https://doi.org/10.3390/mi14112024
Kolesnik K, Pham DQL, Fong J, Collins DJ. Thomson–Einstein’s Tea Leaf Paradox Revisited: Aggregation in Rings. Micromachines. 2023; 14(11):2024. https://doi.org/10.3390/mi14112024
Chicago/Turabian StyleKolesnik, Kirill, Daniel Quang Le Pham, Jessica Fong, and David John Collins. 2023. "Thomson–Einstein’s Tea Leaf Paradox Revisited: Aggregation in Rings" Micromachines 14, no. 11: 2024. https://doi.org/10.3390/mi14112024
APA StyleKolesnik, K., Pham, D. Q. L., Fong, J., & Collins, D. J. (2023). Thomson–Einstein’s Tea Leaf Paradox Revisited: Aggregation in Rings. Micromachines, 14(11), 2024. https://doi.org/10.3390/mi14112024