
Compound Control of Trajectory Errors in a Non-Resonant Piezo-Actuated Elliptical Vibration Cutting Device


Abstract
:1. Introduction
2. Hysteresis Model of the Piezoelectric Stack Actuator
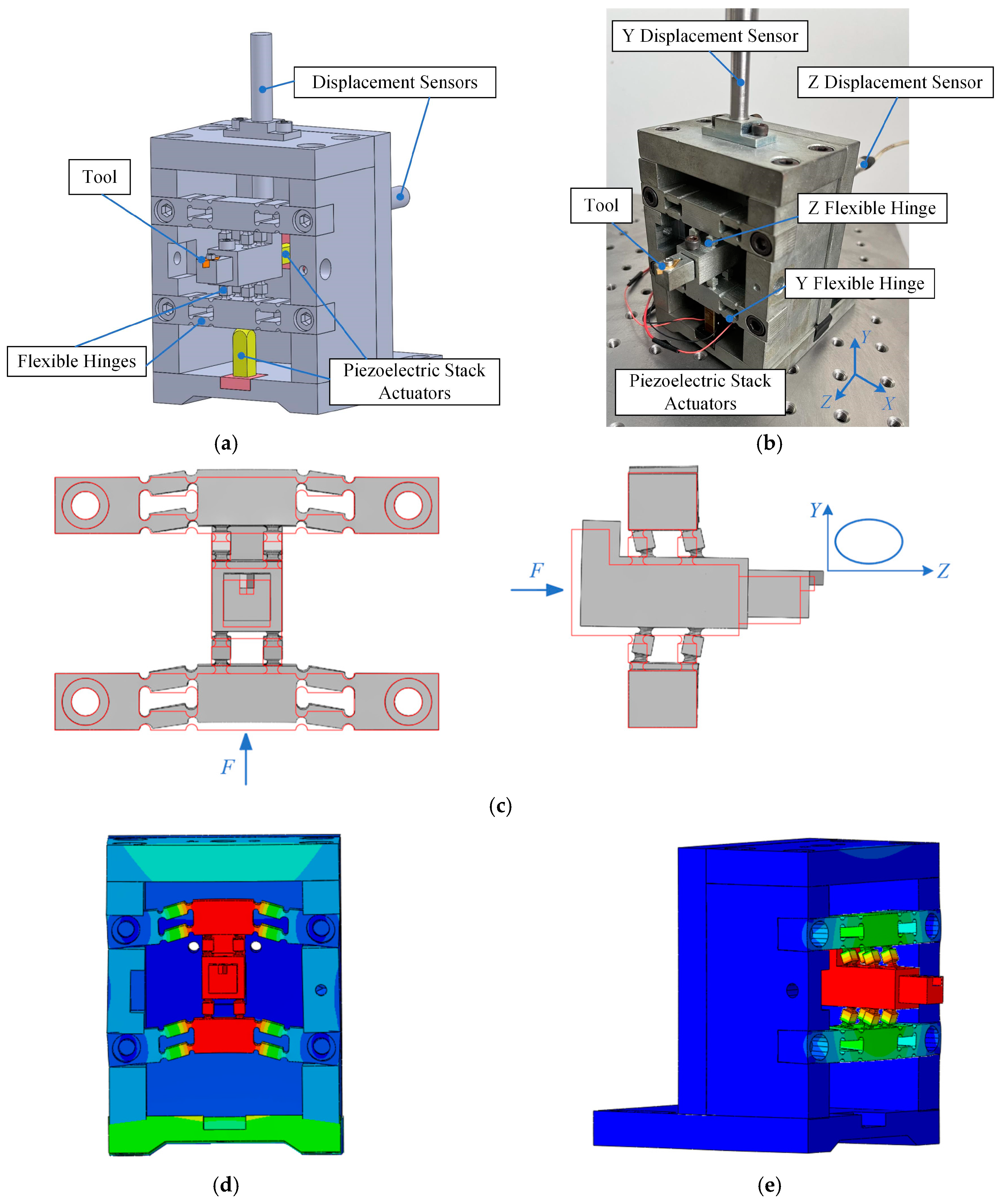
2.1. Hysteresis Characteristics Analysis of the EVC Device
2.2. Dynamic Hysteresis Model of the PSA
2.3. Model Parameter Identification
2.3.1. Static PI Model Identification
- (a)
- In theory, the finer the threshold division, the more play operators will be used, then the higher the accuracy of the PI model can be obtained. However, it will increase the complexity of the static PI model. The operators have a threshold width of beyond the input width of the initial load period. So, there is no need to define any operator beyond the midpoint of the control input range, i.e.,
- (b)
- Using the quadratic programming algorithm (quadgrog function) in MATLAB to find the minimization solution of Equation (8).
- (c)
- (d)
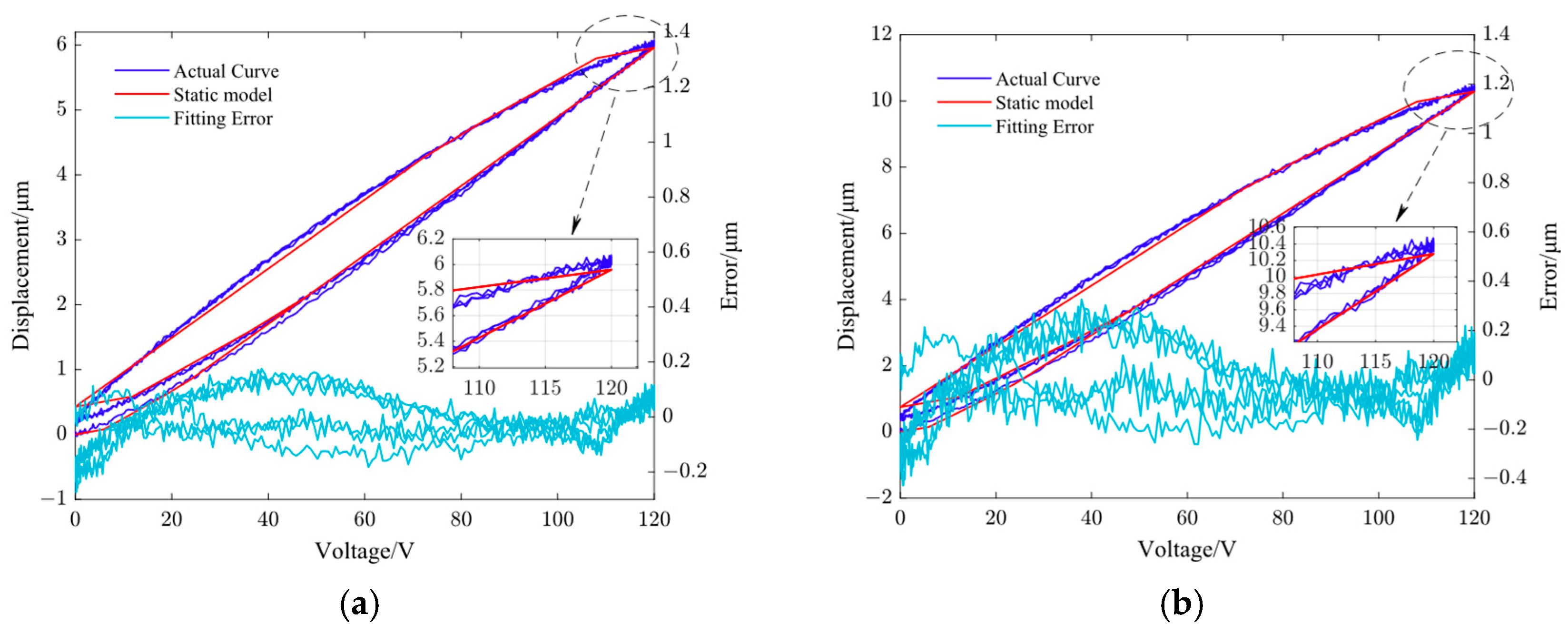
- Figure 5 shows the fitting results of the static PI model in the Y and Z directions of the non-resonant EVC device at a frequency of 1 Hz. The root mean square (RMS) errors of the static PI model corresponding to 1 Hz frequency in the Y and Z directions are 0.0881 μm and 0.1432 μm, respectively.
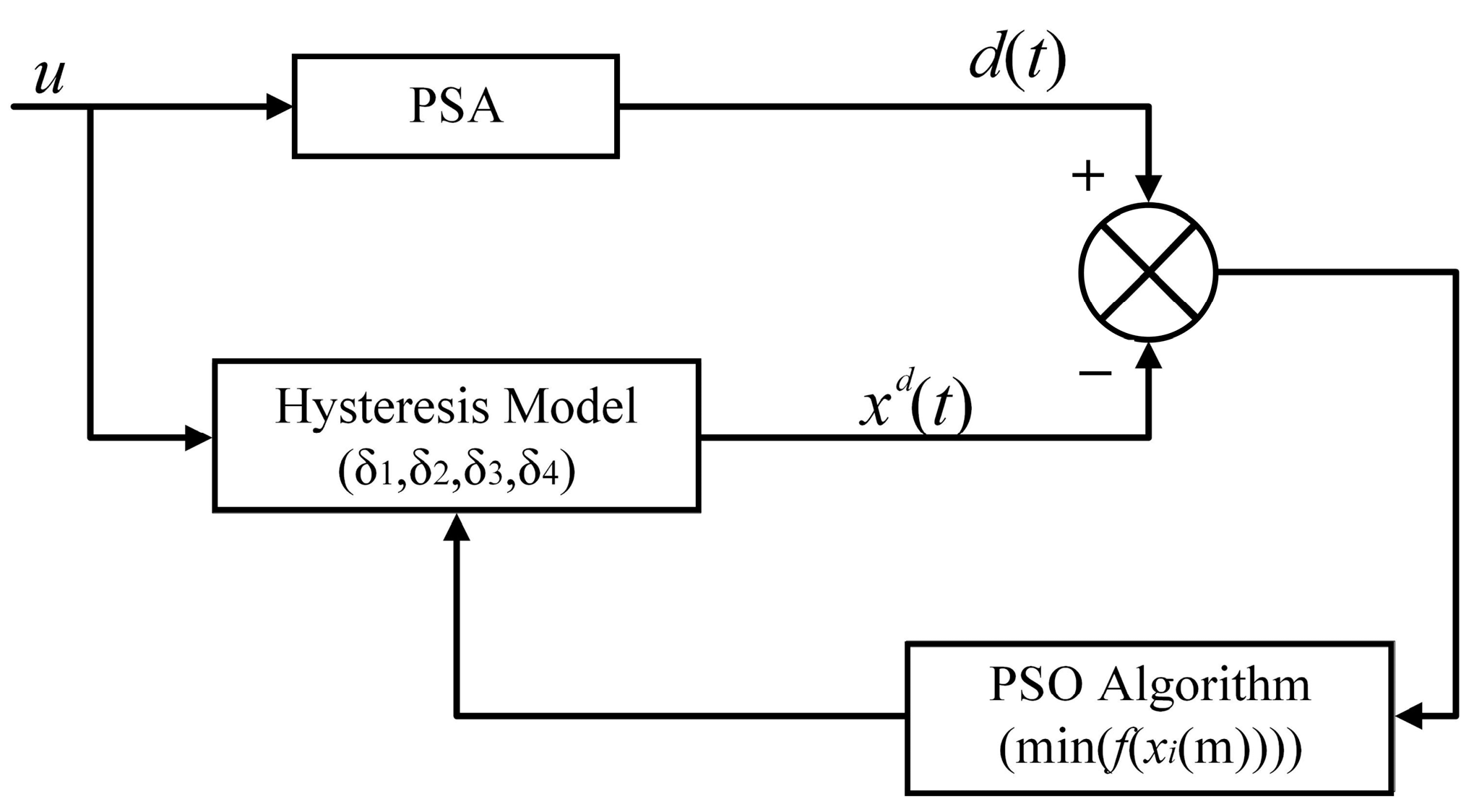
2.3.2. Parameter Identification of Dynamic PI Model Using PSO Algorithm
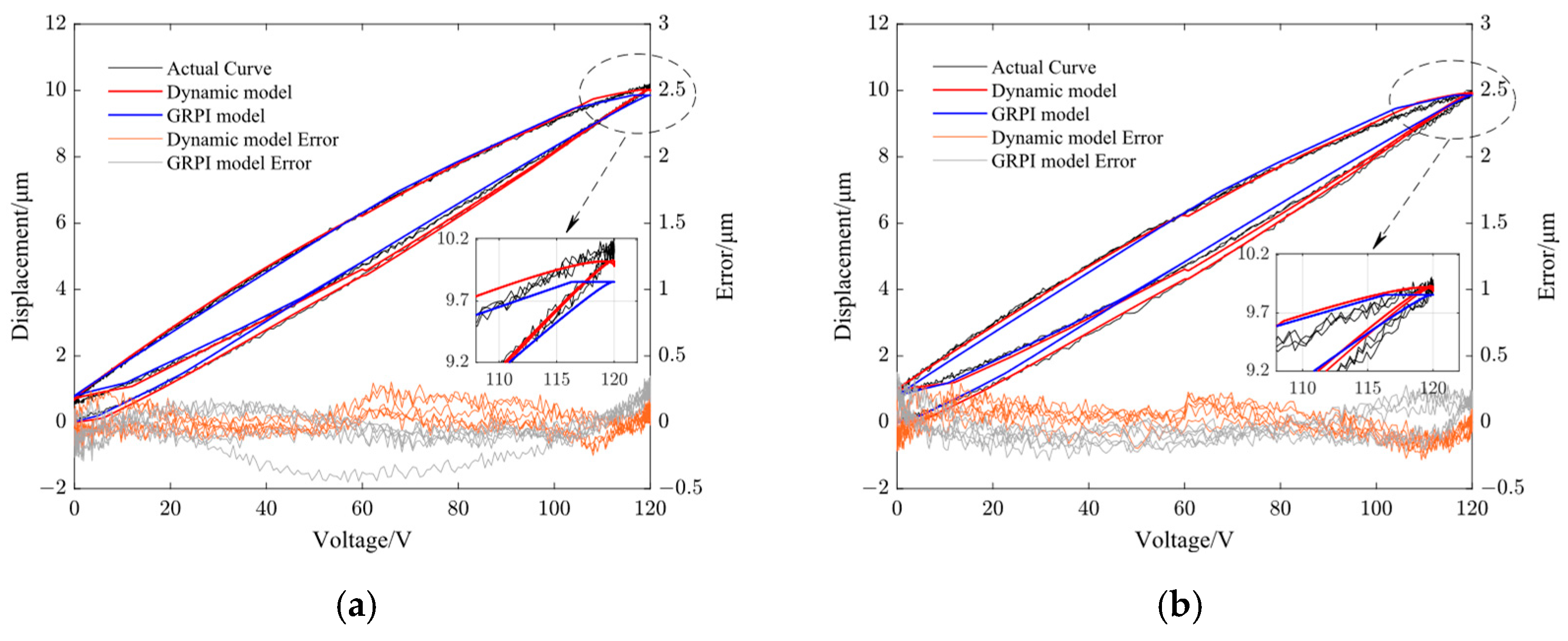
2.3.3. Simulation Results
3. Controller Design with Dynamic Hysteresis Compensation
4. Trajectory Tracking of the Non-Resonant EVC Device
5. Conclusions
- A dynamic PI model was built by considering the rate-dependent and acceleration-dependent hysteresis characteristics to improve the accuracy of the PI model. Then, the particle swarm optimization was used to identify the dynamic PI model parameters. Based on the identified parameters, the dynamic PI model was used to fit the hysteresis loop curves of the non-resonant EVC device at different frequencies. The simulation results showed that the proposed dynamic PI model can represent the input rate-dependent and nonlinear properties of the non-resonant EVC device significantly compared with the GRPI and static PI models.
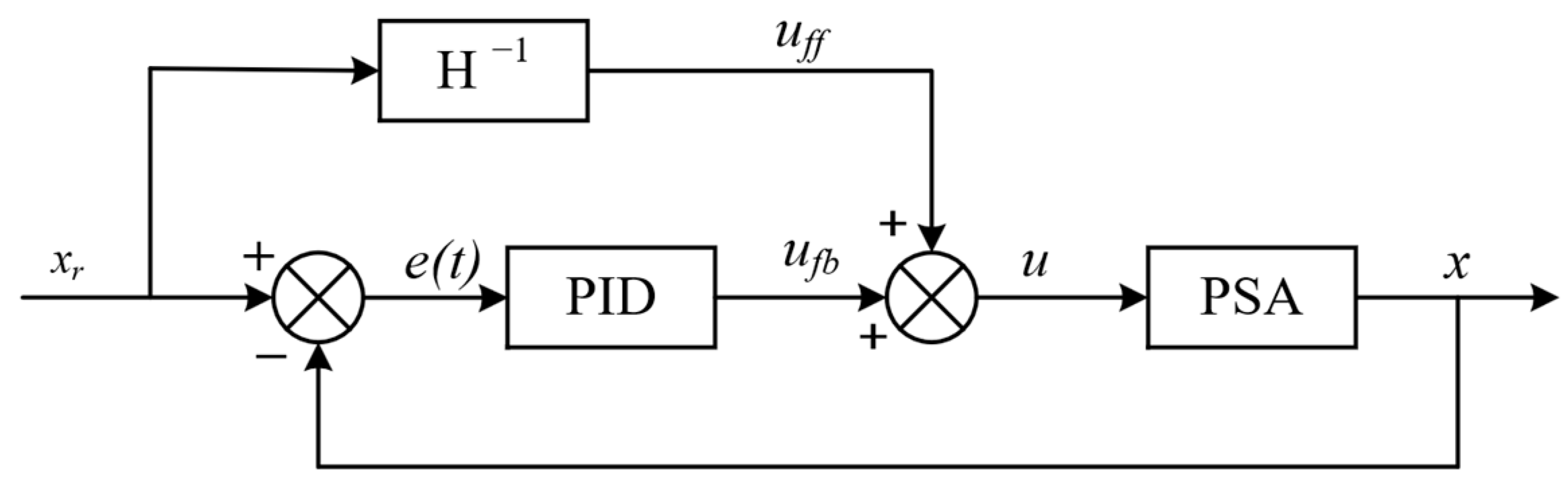
- Based on the dynamic PI model, its inverse model has been derived. Then, a compound control method has been proposed, in which the inverse dynamic PI model is used as the feedforward controller for the dynamic hysteresis compensation, while PID feedback is used to improve the control accuracy.
- Finally, based on the proposed compound control method, trajectory-tracking experiments were conducted to verify the feasibility of the proposed compound control method. Experimental results showed that the relative error is less than 6.2%, which means the proposed compound control method has good control accuracy for this non-resonant EVC device.
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, Y.; Zhang, D.; Jing, X.; Ehmann, K.F. Freeform surface fabrication on hardened steel by double frequency vibration cutting. J. Mater. Process. Technol. 2020, 275, 116369. [Google Scholar] [CrossRef]
- Sauvet, B.; Laliberte, T.; Gosselin, C. Design, analysis and experimental validation of an ungrounded haptic interface using a piezoelectric actuator. Mechatronics 2017, 45, 100–109. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, D.; Jing, X.; Zhu, H.; Zhu, W.; Cao, J.; Ehmann, K.F. Fabrication of hierarchical freeform surfaces by 2D compliant vibration-assisted cutting. Int. J. Mech. Sci. 2019, 152, 454–464. [Google Scholar] [CrossRef]
- Pinskier, J.; Shirinzadeh, B.; Clark, L.; Qin, Y. Development of a 4-DOF haptic micromanipulator utilizing a hybrid parallel-serial flexure mechanism. Mechatronics 2018, 50, 55–68. [Google Scholar] [CrossRef]
- Ding, B.; Li, Y. Hysteresis compensation and sliding mode control with perturbation estimation for piezoelectric actuators. Micromachines 2018, 9, 241. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, D.; Zhu, H.; Ehmann, K.F. Machining of micro grayscale images on freeform surfaces by vibration-assisted cutting. J. Manuf. Process. 2020, 58, 660–667. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, D.; Jing, X.; Cao, J.; Ehmann, K.F. Micro texture fabrication by a non-resonant vibration generator. J. Manuf. Process. 2019, 45, 732–745. [Google Scholar] [CrossRef]
- Cheng, L.; Liu, W.; Hou, Z.G.; Yu, J.; Tan, M. Neural-network-Based nonlinear model predictive control for piezoelectric actuators. IEEE/ASME Trans. Ind. Electron. 2015, 62, 7717–7727. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Oh, J.; Bernstein, D.S. Semilinear Duhem model for rate-independent and rate-dependent hysteresis. IEEE Trans. Autom. Control 2005, 50, 631–645. [Google Scholar]
- Bouc, R. Forced vibrations of mechanical systems with hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillations, Prague, Czech Republic, 5–9 September 1967. [Google Scholar]
- Fung, R.; Lin, W. System identification of a novel 6-DOF precision positioning table. Sens. Actuators A Phys. 2009, 150, 286–295. [Google Scholar] [CrossRef]
- Fung, R.; Weng, M.; Kung, Y. FPGA-based adaptive backstepping fuzzy control for a micro-positioning Scott-Russell mechanism. Mech. Syst. Signal Process. 2009, 23, 2671–2686. [Google Scholar] [CrossRef]
- Preisach, F. Über die magnetische Nachwirkung. Z. Phys. 1935, 94, 277–302. [Google Scholar] [CrossRef]
- Xiao, S.; Li, Y. Modeling and high dynamic compensating the rate-dependent hysteresis of piezoelectric actuators via a novel modified inverse Preisach model. IEEE Trans. Control Syst. Technol. 2012, 21, 1549–1557. [Google Scholar] [CrossRef]
- Macki, J.W.; Nistri, P.; Zecca, P. Mathematical models for hysteresis. SIAM Rev. 1993, 35, 94–123. [Google Scholar] [CrossRef]
- Jung, S.B.; Kim, S.W. Improvement of scanning accuracy of PZT piezoelectric actuator by feed-forward-model-reference control. Precis. Eng. 1994, 16, 49–55. [Google Scholar] [CrossRef]
- Galinaitis, W.S.; Rogers, R.C. Compensation for hysteresis using bivariate Preisach models. In Proceedings of the Smart Structures and Materials 1997: Mathematics and Control in Smart Structures, San Diego, CA, USA, 3–6 March 1997. [Google Scholar]
- Tang, H.; Li, Y.; Zhao, X. Hysteresis modeling and inverse feedforward control of an AFM piezoelectric scanner based on nano images. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011. [Google Scholar]
- Fan, Y.; Tan, U. Design of a feedforward-feedback controller for a piezoelectric-driven mechanism to achieve high-frequency nonperiodic motion tracking. IEEE/ASME Trans. Mechatron. 2019, 24, 853–862. [Google Scholar] [CrossRef]
- Kang, S.; Wu, H.; Li, Y.; Yang, X.; Yao, J. A fractional-order normalized Bouc–Wen model for piezoelectric hysteresis nonlinearity. IEEE/ASME Trans. Mechatron. 2021, 27, 126–136. [Google Scholar] [CrossRef]
- Kim, G.D.; Loh, B.G. Characteristics of chip formation in micro V-grooving using elliptical vibration cutting. J. Micromech. Microeng. 2007, 17, 1458. [Google Scholar] [CrossRef]
- Kim, G.D.; Loh, B.G. Machining of micro-channels and pyramid patterns using elliptical vibration cutting. Int. J. Adv. Manuf. Technol. 2010, 49, 961–968. [Google Scholar] [CrossRef]
- Zhu, W.L.; Zhu, Z.; He, Y.; Ehmann, K.F.; Ju, B.F.; Li, S. Development of a Novel 2-D Vibration-Assisted Compliant Cutting System for Surface Texturing. IEEE/ASME Trans. Mechatron. 2017, 22, 1796–1806. [Google Scholar] [CrossRef]
- Ren, B.; Dai, J.; Zhong, Q. UDE-based robust output feedback control with applications to a piezoelectric stage. IEEE Trans. Ind. Electron. 2019, 67, 7819–7828. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, A.; Qin, S. A fuzzy model predictive controller for stick-slip type piezoelectric actuators. Optim. Control Appl. Methods 2023, 44, 1058–1073. [Google Scholar] [CrossRef]
- Luan, B.; Zhang, C.; Huo, J.; Xiaoming, G. Research on Control of Non-Resonant Elliptical Vibration Cutting Device Based on Piezoelectric Hysteresis Model. Aeronaut. Manuf. Technol. 2019, 62, 66–72. [Google Scholar]
- Bayramoglu, H.; Komurcugil, H. Nonsingular decoupled terminal sliding-mode control for a class of fourth-order nonlinear systems. Commun. Nonlinear Sci. 2013, 18, 2527–2539. [Google Scholar] [CrossRef]
- Li, Z.F.; Yuan, P.; Hu, Y.M.; Chen, T. Adaptive control of a class of uncertain nonlinear systems with unknown input hysteresis. In Proceedings of the 2011 IEEE International Conference on Information and Automation, Shenzhen, China, 6–8 June 2011. [Google Scholar]
- Guilin, Z.; Chengjin, Z.; Kang, L. Adaptive identification and inverse control of piezoelectric actuators based on PI hysteresis model. Nanotechnol. Precis. Eng. 2013, 11, 85–89. [Google Scholar]
- Hongwei, M.; Ying, X.; Dong, A.; Meng, S.; Dongliang, C. Hysteresis compensation method for piezoelectric actuators based on three segment PI model. Nanotechnol. Precis. Eng. (NPE) 2017, 15, 53–60. [Google Scholar]
- Al Janaideh, M.; Krejčí, P. An inversion formula for a Prandtl–Ishlinskii operator with time dependent thresholds. Phys. B Condens. Matter 2011, 406, 1528–1532. [Google Scholar] [CrossRef]
- Ang, W.T.; Khosla, P.K.; Riviere, C.N. Feedforward controller with inverse rate-dependent model for piezoelectric actuators in trajectory-tracking applications. IEEE/ASME Trans. Mechatron. 2007, 12, 134–142. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Al Saaideh, M.; Tan, X. The Prandtl–Ishlinskii Hysteresis Model: Fundamentals of the Model and Its Inverse Compensator. IEEE Control Syst. Mag. 2023, 43, 66–84. [Google Scholar] [CrossRef]
- Krejci, P.; Kuhnen, K. Inverse control of systems with hysteresis and creep. IEE Proc.-Control Theory Appl. 2001, 148, 185–192. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Permittivity | ||||
|---|---|---|---|---|
| 3500 ± 20% | 7.9 | 70% | 650 × 10−12 | 17 × 10−3 |
| Elastic compliance constant | Elastic compliance constant | Dielectric loss | Quality factor | Curie temperature |
| 14.3 × 10−12 m2/N | 18.5 × 10−12 m2/N | 1.5% | 45 | 240 °C |
| i | i | ||||
|---|---|---|---|---|---|
| 1 | 0 | 0.01354 | 6 | 30 | 3.3995 × 10−14 |
| 2 | 6 | 0.02790 | 7 | 36 | 6.8298 × 10−13 |
| 3 | 12 | 4.3634 × 10−8 | 8 | 42 | 8.9564 × 10−13 |
| 4 | 18 | 0.004014 | 9 | 48 | 8.0574 × 10−13 |
| 5 | 24 | 0.007765 | 10 | 54 | 7.0060 × 10−15 |
| i | i | ||||
|---|---|---|---|---|---|
| 1 | 0 | 0.02523 | 6 | 30 | 9.3376 × 10−11 |
| 2 | 6 | 0.04579 | 7 | 36 | 3.3631 × 10−13 |
| 3 | 12 | 1.2251 × 10−12 | 8 | 42 | 1.8601 × 10−14 |
| 4 | 18 | 0.004541 | 9 | 48 | 5.8275 × 10−15 |
| 5 | 24 | 0.001636 | 10 | 54 | 3.5902 × 10−15 |
| Parameter | ||||
| Data | −8.4632 × 10−7 | −3.9336 × 10−6 | 1.4926 × 10−6 | −3.0164 × 10−6 |
| Parameter | ||||
| Data | 2.5880 × 10−7 | 9.6875 × 10−7 | 2.1025 × 10−6 | 1.3017 × 10−6 |
| Parameter | ||||
| Data | 1.4025 × 10−5 | 9.9453 × 10−6 | −1.9265 × 10−5 | −2.8075 × 10−5 |
| Parameter | ||||
| Data | 1.6927 × 10−5 | −1.9517 × 10−5 | −1.5271 × 10−5 | 1.5862 × 10−5 |
| Direction | Frequency | Dynamic PI Model | GRPI Model | Static PI Model |
|---|---|---|---|---|
| Y | 10 Hz | 0.0586 | 0.0933 | 0.0991 |
| 100 Hz | 0.0812 | 0.0985 | 0.1075 | |
| Z | 10 Hz | 0.0901 | 0.1449 | 0.1406 |
| 100 Hz | 0.1039 | 0.1326 | 0.1513 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Shu, Z.; Yuan, Y.; Gan, X.; Yu, F. Compound Control of Trajectory Errors in a Non-Resonant Piezo-Actuated Elliptical Vibration Cutting Device. Micromachines 2023, 14, 1961. https://doi.org/10.3390/mi14101961
Zhang C, Shu Z, Yuan Y, Gan X, Yu F. Compound Control of Trajectory Errors in a Non-Resonant Piezo-Actuated Elliptical Vibration Cutting Device. Micromachines. 2023; 14(10):1961. https://doi.org/10.3390/mi14101961
Chicago/Turabian StyleZhang, Chen, Zeliang Shu, Yanjie Yuan, Xiaoming Gan, and Fuhang Yu. 2023. "Compound Control of Trajectory Errors in a Non-Resonant Piezo-Actuated Elliptical Vibration Cutting Device" Micromachines 14, no. 10: 1961. https://doi.org/10.3390/mi14101961
APA StyleZhang, C., Shu, Z., Yuan, Y., Gan, X., & Yu, F. (2023). Compound Control of Trajectory Errors in a Non-Resonant Piezo-Actuated Elliptical Vibration Cutting Device. Micromachines, 14(10), 1961. https://doi.org/10.3390/mi14101961