

Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
4. Conclusions
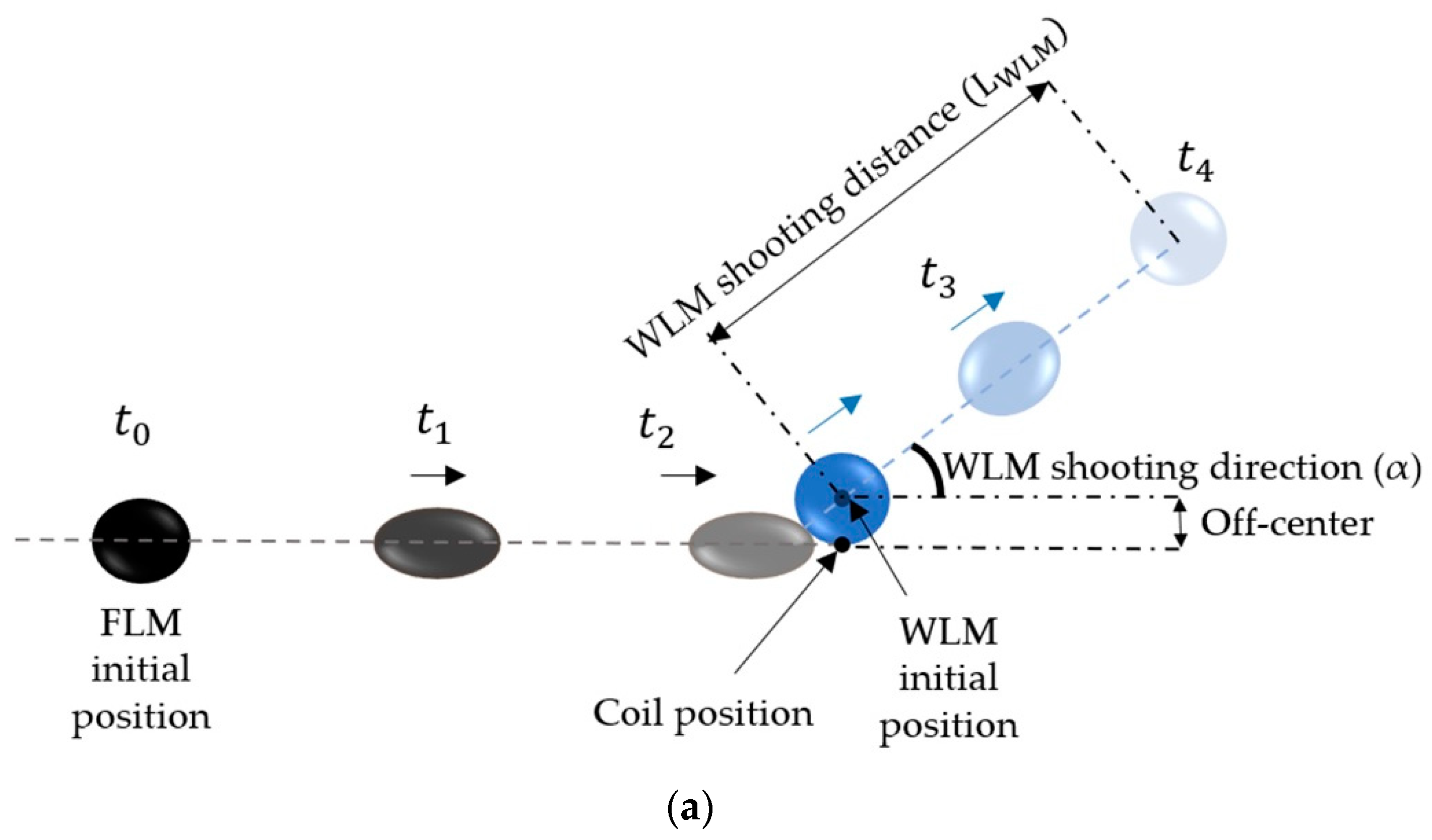
- The collision of two liquid marbles is inelastic and consists of four stages. First, the FLM approaches the electromagnet with an accelerating motion while the WLM is stationary. Then, the driver FLM impulses the WLM and transfers a portion of its momentum to the driven liquid marble. Afterward, the stuck-together liquid marbles move toward the electromagnet with an overall accelerating motion and a velocity fluctuation. At last, the liquid marbles are detached: The FLM stops moving and is fixed on the coil tip, but the WLM exhibits a deaccelerating motion and finally stops due to the existence of friction force.
- By increasing the WLM initial distance from the electromagnet from 0 to 20 mm, its shooting distance increases by 50%, 70%, and 90% for liquid marbles volumes of 10, 30, and 50 , respectively. Additionally, when the WLM and FLM volumes increase, the WLM shooting distance increases as well.
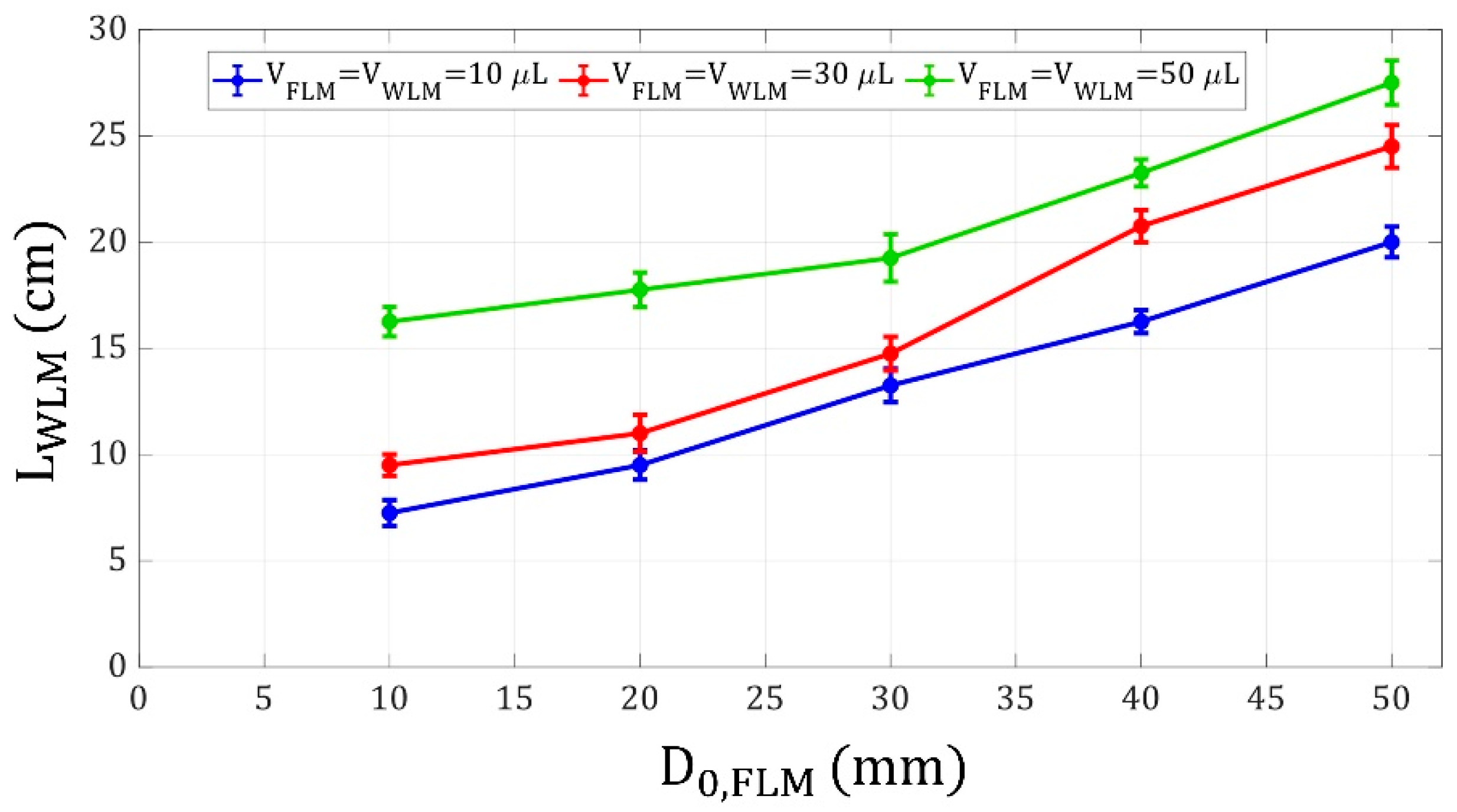
- Increasing the FLM initial distance from the electromagnet results in an increment in the WLM shooting distance.
- As the WLM volume increases, its shooting distance decreases.
- By employing larger FLMs, the WLM can be manipulated to farther distances from the electromagnet.
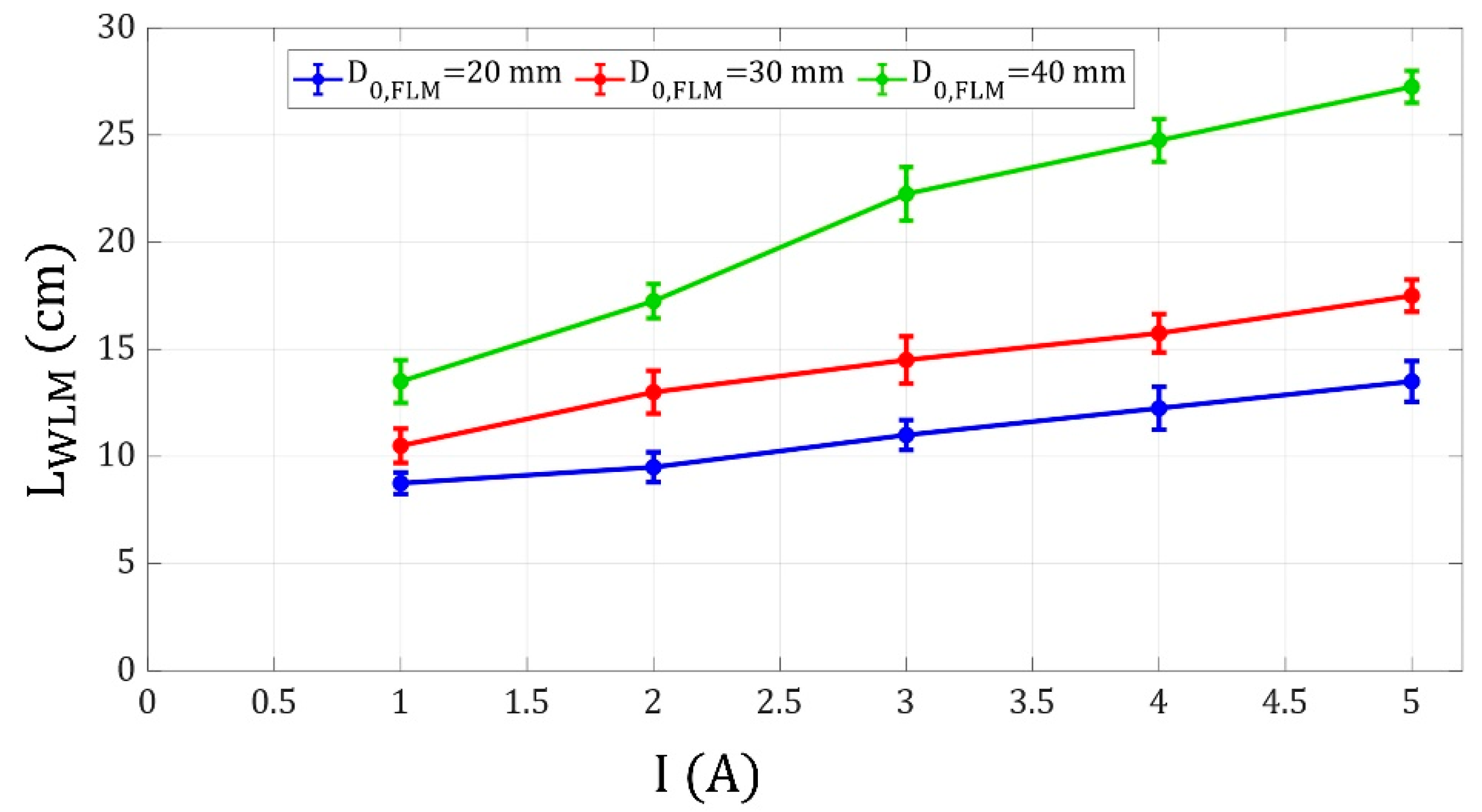
- If the coil current increases, the WLM will be launched farther.
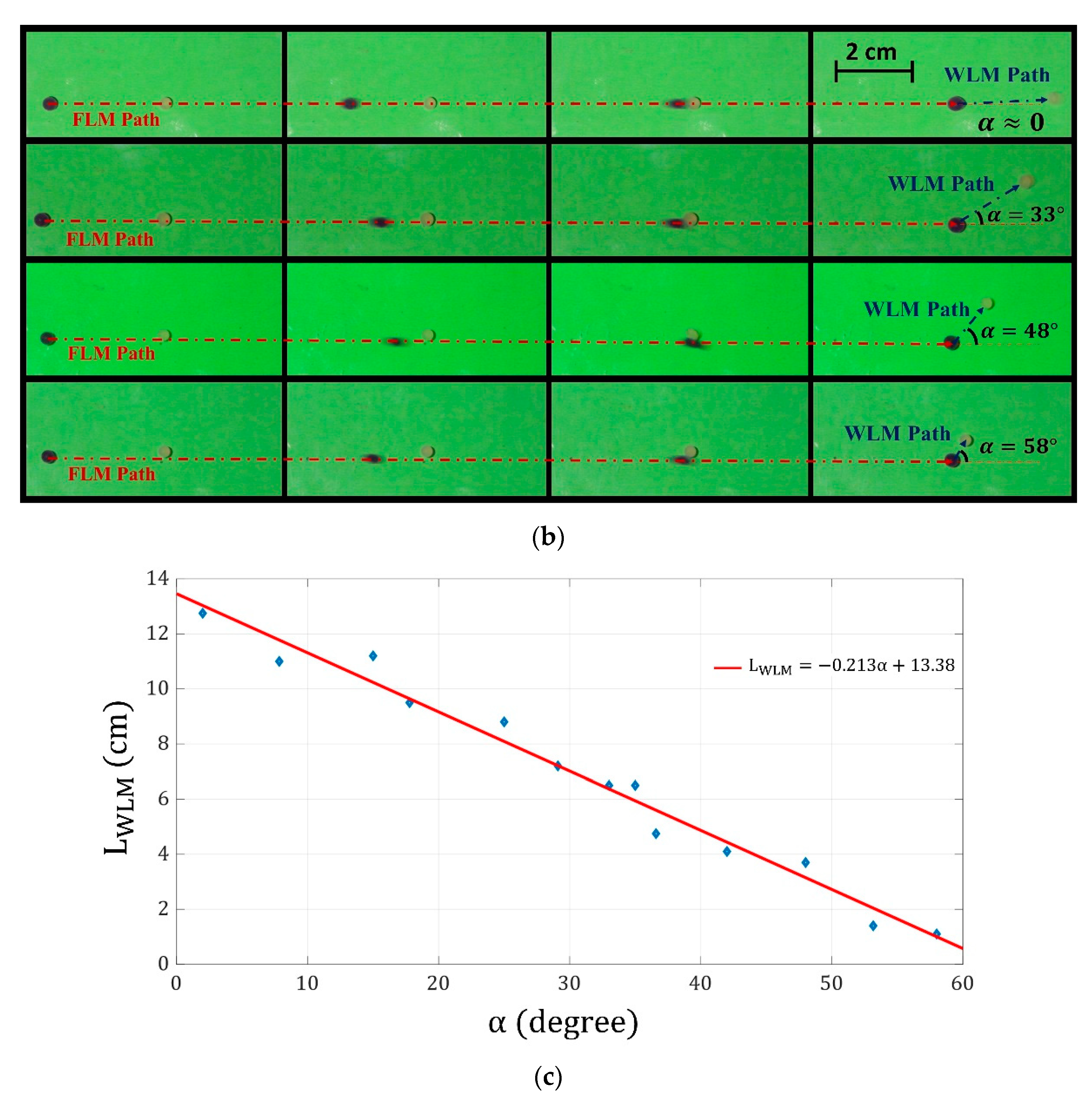
- By proper adjustment of the WLM off-center from the connecting line between the FLM center and the electromagnet tip, precise control over the WLM direction is attained. Accordingly, as the adjusted off-center increases, the WLM is launched less strongly, leading to a shorter WLM shooting distance and a larger WLM shooting path angle.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ooi, C.H.; Vadivelu, R.; Jin, J.; Sreejith, K.R.; Singha, P.; Nguyen, N.-K.; Nguyen, N.-T. Liquid marble-based digital microfluidics—fundamentals and applications. Lab A Chip 2021, 21, 1199–1216. [Google Scholar] [CrossRef] [PubMed]
- Aussillous, P.; Quéré, D. Liquid marbles. Nature 2001, 411, 924–927. [Google Scholar] [CrossRef] [PubMed]
- Aussillous, P.; Quéré, D. Properties of liquid marbles. Proc. R. Soc. A Math. Phys. Eng. Sci. 2006, 462, 973–999. [Google Scholar] [CrossRef]
- Aussillous, P.; Quéré, D. Shapes of rolling liquid drops. J. Fluid Mech. 2004, 512, 133–151. [Google Scholar] [CrossRef]
- Sreejith, K.R.; Gorgannezhad, L.; Jin, J.; Ooi, C.H.; Stratton, H.; Dao, D.V.; Nguyen, N.-T. Liquid marbles as biochemical reactors for the polymerase chain reaction. Lab A Chip 2019, 19, 3220–3227. [Google Scholar] [CrossRef]
- Oliveira, N.M.; Reis, R.L.; Mano, J.F. The Potential of Liquid Marbles for Biomedical Applications: A Critical Review. Adv. Healthc. Mater. 2017, 6, 1700192. [Google Scholar] [CrossRef]
- Nguyen, N.-K.; Ooi, C.H.; Singha, P.; Jin, J.; Sreejith, K.R.; Phan, H.-P.; Nguyen, N.-T. Liquid marbles as miniature reactors for chemical and biological applications. Processes 2020, 8, 793. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Hejazian, M.; Ooi, C.H.; Kashaninejad, N. Recent Advances and Future Perspectives on Microfluidic Liquid Handling. Micromachines 2017, 8, 186. [Google Scholar] [CrossRef]
- Ooi, C.H.; Nguyen, N.-T. Manipulation of liquid marbles. Microfluid. Nanofluidics 2015, 19, 483–495. [Google Scholar] [CrossRef]
- Jin, J.; Nguyen, N.-T. Manipulation schemes and applications of liquid marbles for micro total analysis systems. Microelectron. Eng. 2018, 197, 87–95. [Google Scholar] [CrossRef]
- Jin, J.; Ooi, C.H.; Dao, D.V.; Nguyen, N.-T. Coalescence processes of droplets and liquid marbles. Micromachines 2017, 8, 336. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Chan, K.F.; Ji, F.; Wang, Q.; Chiu, P.W.Y.; Guo, Z.; Zhang, L. On-Demand Coalescence and Splitting of Liquid Marbles and Their Bioapplications. Adv. Sci. 2019, 6, 1802033. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Cui, H.; Binks, B.P.; Shum, H.C. Liquid Marbles under Electric Fields: New Capabilities for Non-wetting Droplet Manipulation and Beyond. Langmuir 2022, 38, 9721–9740. [Google Scholar] [CrossRef] [PubMed]
- Ooi, C.H.; Jin, J.; Sreejith, K.R.; Nguyen, A.V.; Evans, G.M.; Nguyen, N.-T. Manipulation of a floating liquid marble using dielectrophoresis. Lab A Chip 2018, 18, 3770–3779. [Google Scholar] [CrossRef] [PubMed]
- Newton, M.; Herbertson, D.; Elliott, S.; Shirtcliffe, N.; McHale, G. Electrowetting of liquid marbles. J. Phys. D Appl. Phys. 2006, 40, 20. [Google Scholar] [CrossRef]
- McHale, G.; Herbertson, D.; Elliott, S.; Shirtcliffe, N.; Newton, M. Electrowetting of nonwetting liquids and liquid marbles. Langmuir 2007, 23, 918–924. [Google Scholar] [CrossRef]
- Chen, Z.; Zang, D.; Zhao, L.; Qu, M.; Li, X.; Li, X.; Li, L.; Geng, X. Liquid marble coalescence and triggered microreaction driven by acoustic levitation. Langmuir 2017, 33, 6232–6239. [Google Scholar] [CrossRef]
- Pang, X.; Duan, M.; Liu, H.; Xi, Y.; Shi, H.; Li, X. Oscillation-Induced Mixing Advances the Functionality of Liquid Marble Microreactors. ACS Appl. Mater. Interfaces 2022, 14, 11999–12009. [Google Scholar] [CrossRef]
- Kavokine, N.; Anyfantakis, M.; Morel, M.; Rudiuk, S.; Bickel, T.; Baigl, D. Light-Driven Transport of a Liquid Marble with and against Surface Flows. Angew. Chem. Int. Ed. 2016, 55, 11183–11187. [Google Scholar] [CrossRef]
- Zhang, Y.; Nguyen, N.-T. Magnetic digital microfluidics–a review. Lab A Chip 2017, 17, 994–1008. [Google Scholar] [CrossRef]
- Zhao, Y.; Fang, J.; Wang, H.; Wang, X.; Lin, T. Magnetic liquid marbles: Manipulation of liquid droplets using highly hydrophobic Fe3O4 nanoparticles. Adv. Mater. 2010, 22, 707–710. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Xu, Z.; Niu, H.; Wang, X.; Lin, T. Magnetic liquid marbles: Toward “lab in a droplet”. Adv. Funct. Mater. 2015, 25, 437–444. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, Z.; Parhizkar, M.; Fang, J.; Wang, X.; Lin, T. Magnetic liquid marbles, their manipulation and application in optical probing. Microfluid. Nanofluidics 2012, 13, 555–564. [Google Scholar] [CrossRef]
- Khaw, M.K.; Ooi, C.H.; Mohd-Yasin, F.; Nguyen, A.V.; Evans, G.M.; Nguyen, N.-T. Dynamic behaviour of a magnetically actuated floating liquid marble. Microfluid. Nanofluidics 2017, 21, 1–12. [Google Scholar] [CrossRef]
- Khaw, M.K.; Ooi, C.H.; Mohd-Yasin, F.; Vadivelu, R.; St John, J.; Nguyen, N.-T. Digital microfluidics with a magnetically actuated floating liquid marble. Lab A Chip 2016, 16, 2211–2218. [Google Scholar] [CrossRef]
- Jeong, J.; Lee, J.-B.; Chung, S.K.; Kim, D. Electromagnetic three dimensional liquid metal manipulation. Lab A Chip 2019, 19, 3261–3267. [Google Scholar] [CrossRef]
- Rosensweig, R.E. Ferrohydrodynamics; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Rosensweig, R.E. Magnetic fluids. Annu. Rev. Fluid Mech. 1987, 19, 437–461. [Google Scholar] [CrossRef]
- Rezaeian, M.; Nouri, M.; Hassani-Gangaraj, M.; Shamloo, A.; Nasiri, R. The Effect of Non-Uniform Magnetic Field on the Efficiency of Mixing in Droplet-Based Microfluidics: A Numerical Investigation. Micromachines 2022, 13, 1661. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Favakeh, A.; Mohammadi, K.; Akbari, A.; Shafii, M.B. Ferrofluid droplet breakup process and neck evolution under steady and pulse-width modulated magnetic fields. J. Mol. Liq. 2021, 343, 117536. [Google Scholar] [CrossRef]
- Zhou, R.; Surendran, A.N.; Mejulu, M.; Lin, Y. Rapid microfluidic mixer based on ferrofluid and integrated microscale NdFeB-PDMS magnet. Micromachines 2019, 11, 29. [Google Scholar] [CrossRef]
- Hejazian, M.; Nguyen, N.-T. A rapid magnetofluidic micromixer using diluted ferrofluid. Micromachines 2017, 8, 37. [Google Scholar] [CrossRef]
- Yang, R.-J.; Hou, H.-H.; Wang, Y.-N.; Fu, L.-M. Micro-magnetofluidics in microfluidic systems: A review. Sens. Actuators B Chem. 2016, 224, 1–15. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Yaghoobi, M.; Favakeh, A.; Shafii, M.B. On-demand ferrofluid droplet formation with non-linear magnetic permeability in the presence of high non-uniform magnetic fields. Sci. Rep. 2022, 12, 1–23. [Google Scholar] [CrossRef] [PubMed]
- Pamme, N. Magnetism and microfluidics. Lab A Chip 2006, 6, 24–38. [Google Scholar] [CrossRef]
- Nguyen, N.-T. Micro-magnetofluidics: Interactions between magnetism and fluid flow on the microscale. Microfluid. Nanofluidics 2012, 12, 1–16. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Favakeh, A.; Alborzi, S.; Shafii, M.B. Experimental investigation of on-demand ferrofluid droplet generation in microfluidics using a Pulse-Width Modulation magnetic field with proposed correlation. Sens. Actuators B Chem. 2021, 329, 129274. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Shafii, M.B. Experimental investigation on the dynamics of on-demand ferrofluid drop formation under a pulse-width-modulated nonuniform magnetic field. Langmuir 2020, 36, 7724–7740. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Dizani, M.; Honarmand, M.; Shafii, M.B. Splitting dynamics of ferrofluid droplets inside a microfluidic T-junction using a pulse-width modulated magnetic field in micro-magnetofluidics. Soft Matter 2021, 17, 1317–1329. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Favakeh, A.; Shafii, M.B. The effect of a non-uniform pulse-width modulated magnetic field with different angles on the swinging ferrofluid droplet formation. J. Ind. Eng. Chem. 2020, 84, 106–119. [Google Scholar] [CrossRef]
- Majidi, M.; Bijarchi, M.A.; Arani, A.G.; Rahimian, M.H.; Shafii, M.B. Magnetic field-induced control of a compound ferrofluid droplet deformation and breakup in shear flow using a hybrid lattice Boltzmann-finite difference method. Int. J. Multiph. Flow 2022, 146, 103846. [Google Scholar] [CrossRef]
- Favakeh, A.; Bijarchi, M.A.; Shafii, M.B. Ferrofluid droplet formation from a nozzle using alternating magnetic field with different magnetic coil positions. J. Magn. Magn. Mater. 2020, 498, 166134. [Google Scholar] [CrossRef]
- Shyam, S.; Asfer, M.; Mehta, B.; Mondal, P.K.; Almutairi, Z.A. Magnetic field driven actuation of sessile ferrofluid droplets in the presence of a time dependent magnetic field. Colloids Surf. A Physicochem. Eng. Asp. 2020, 586, 124116. [Google Scholar] [CrossRef]
- Beyzavi, A.; Nguyen, N.-T. Programmable two-dimensional actuation of ferrofluid droplet using planar microcoils. J. Micromechanics Microengineering 2009, 20, 015018. [Google Scholar] [CrossRef]
- Ray, A.; Varma, V.B.; Jayaneel, P.; Sudharsan, N.; Wang, Z.; Ramanujan, R.V. On demand manipulation of ferrofluid droplets by magnetic fields. Sens. Actuators B: Chem. 2017, 242, 760–768. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Ng, K.M.; Huang, X. Manipulation of ferrofluid droplets using planar coils. Appl. Phys. Lett. 2006, 89, 052509. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Zhu, G.; Chua, Y.-C.; Phan, V.-N.; Tan, S.-H. Magnetowetting and sliding motion of a sessile ferrofluid droplet in the presence of a permanent magnet. Langmuir 2010, 26, 12553–12559. [Google Scholar] [CrossRef]
- Katsikis, G.; Cybulski, J.S.; Prakash, M. Synchronous universal droplet logic and control. Nat. Phys. 2015, 11, 588–596. [Google Scholar] [CrossRef]
- Bijarchi, M.A.; Favakeh, A.; Sedighi, E.; Shafii, M.B. Ferrofluid droplet manipulation using an adjustable alternating magnetic field. Sens. Actuators A Phys. 2020, 301, 111753. [Google Scholar] [CrossRef]
- Latikka, M.; Backholm, M.; Baidya, A.; Ballesio, A.; Serve, A.; Beaune, G.; Timonen, J.V.; Pradeep, T.; Ras, R.H. Ferrofluid Microdroplet Splitting for Population-Based Microfluidics and Interfacial Tensiometry. Adv. Sci. 2020, 7, 2000359. [Google Scholar] [CrossRef]
- Fan, X.; Dong, X.; Karacakol, A.C.; Xie, H.; Sitti, M. Reconfigurable multifunctional ferrofluid droplet robots. Proc. Natl. Acad. Sci. USA 2020, 117, 27916–27926. [Google Scholar] [CrossRef]
- Mandal, C.; Banerjee, U.; Sen, A. Transport of a sessile aqueous droplet over spikes of oil based ferrofluid in the presence of a magnetic field. Langmuir 2019, 35, 8238–8245. [Google Scholar] [CrossRef]
- Lin, H.; Yu, W.; A Sabet, K.; Bogumil, M.; Zhao, Y.; Hambalek, J.; Lin, S.; Chandrasekaran, S.; Garner, O.; Di Carlo, D. Ferrobotic swarms enable accessible and adaptable automated viral testing. Nature 2022, 611, 570–577. [Google Scholar] [CrossRef] [PubMed]
- Bormashenko, E.; Pogreb, R.; Bormashenko, Y.; Musin, A.; Stein, T. New investigations on ferrofluidics: Ferrofluidic marbles and magnetic-field-driven drops on superhydrophobic surfaces. Langmuir 2008, 24, 12119–12122. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, N.-T. Deformation of ferrofluid marbles in the presence of a permanent magnet. Langmuir 2013, 29, 13982–13989. [Google Scholar] [CrossRef] [PubMed]
- Higashi, T.; Minegishi, H.; Nagaoka, Y.; Fukuda, T.; Echigo, A.; Usami, R.; Maekawa, T.; Hanajiri, T. Effects of superparamagnetic nanoparticle clusters on the polymerase chain reaction. Appl. Sci. 2012, 2, 303–314. [Google Scholar] [CrossRef]
- Bormashenko, E.; Pogreb, R.; Whyman, G.; Musin, A. Surface tension of liquid marbles. Colloids Surf. A Physicochem. Eng. Asp. 2009, 351, 78–82. [Google Scholar] [CrossRef]
- Basu, A.S. Droplet morphometry and velocimetry (DMV): A video processing software for time-resolved, label-free tracking of droplet parameters. Lab A Chip 2013, 13, 1892–1901. [Google Scholar] [CrossRef]
- Meriam, J.L.; Kraige, L.G.; Bolton, J.N. Engineering mechanics: Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Hong, J.; Lee, S.J. Detaching droplets in immiscible fluids from a solid substrate with the help of electrowetting. Lab A Chip 2015, 15, 900–907. [Google Scholar] [CrossRef]
- Park, Y.; Lee, K.Y.; Won, T.; Kim, M.; Song, H.; Hong, J.; Chung, S.K. Magnetically maneuverable three-dimensional digital microfluidic manipulation of magnetic droplets for biochemical applications. Jpn. J. Appl. Phys. 2021, 60, 076504. [Google Scholar] [CrossRef]
- Kim, T.; Kim, J.; Kang, J.W.; Kwon, S.B.; Hong, J. Compact Three-Dimensional Digital Microfluidic Platforms with Programmable Contact Charge Electrophoresis Actuation. Langmuir 2022, 38, 5759–5764. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azizian, P.; Mohammadrashidi, M.; Abbas Azimi, A.; Bijarchi, M.A.; Shafii, M.B.; Nasiri, R. Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles. Micromachines 2023, 14, 49. https://doi.org/10.3390/mi14010049
Azizian P, Mohammadrashidi M, Abbas Azimi A, Bijarchi MA, Shafii MB, Nasiri R. Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles. Micromachines. 2023; 14(1):49. https://doi.org/10.3390/mi14010049
Chicago/Turabian StyleAzizian, Parnian, Mahbod Mohammadrashidi, Ali Abbas Azimi, Mohamad Ali Bijarchi, Mohammad Behshad Shafii, and Rohollah Nasiri. 2023. "Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles" Micromachines 14, no. 1: 49. https://doi.org/10.3390/mi14010049
APA StyleAzizian, P., Mohammadrashidi, M., Abbas Azimi, A., Bijarchi, M. A., Shafii, M. B., & Nasiri, R. (2023). Magnetically Driven Manipulation of Nonmagnetic Liquid Marbles: Billiards with Liquid Marbles. Micromachines, 14(1), 49. https://doi.org/10.3390/mi14010049