


A Disposable Electromagnetic Bi-Directional Micropump Utilizing a Rotating Multi-Pole Ring Magnetic Coupling


Abstract
:
1. Introduction
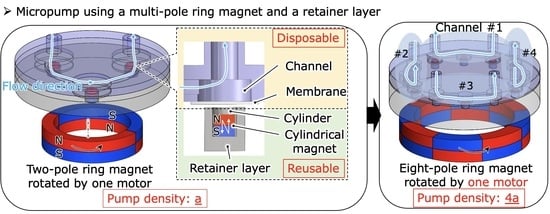
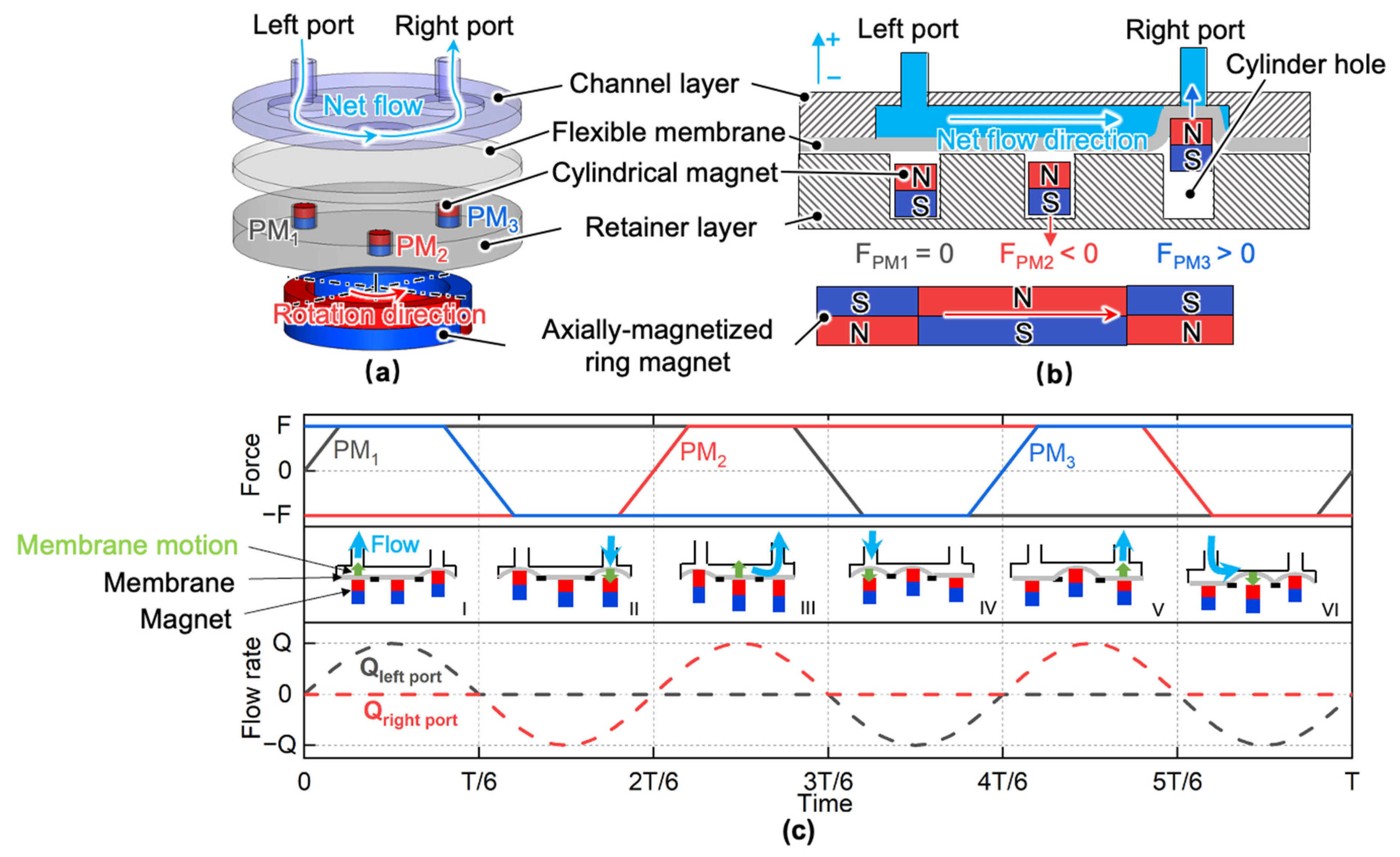
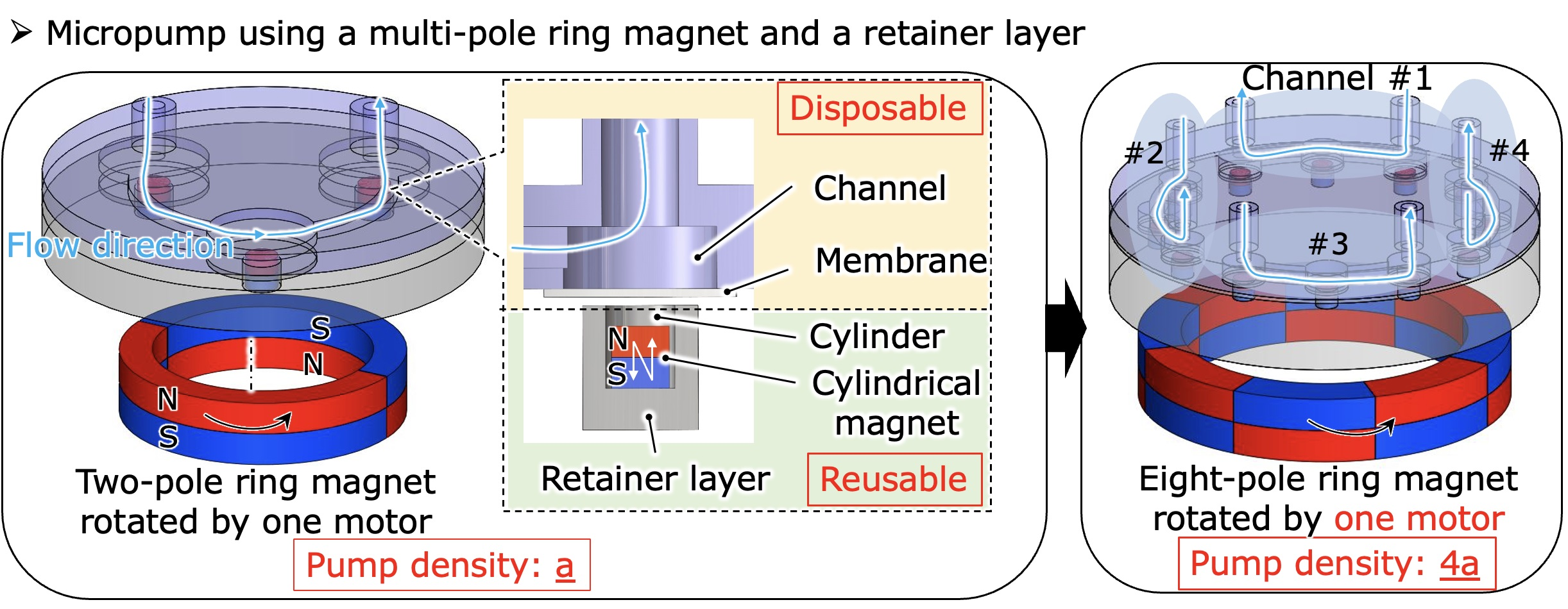
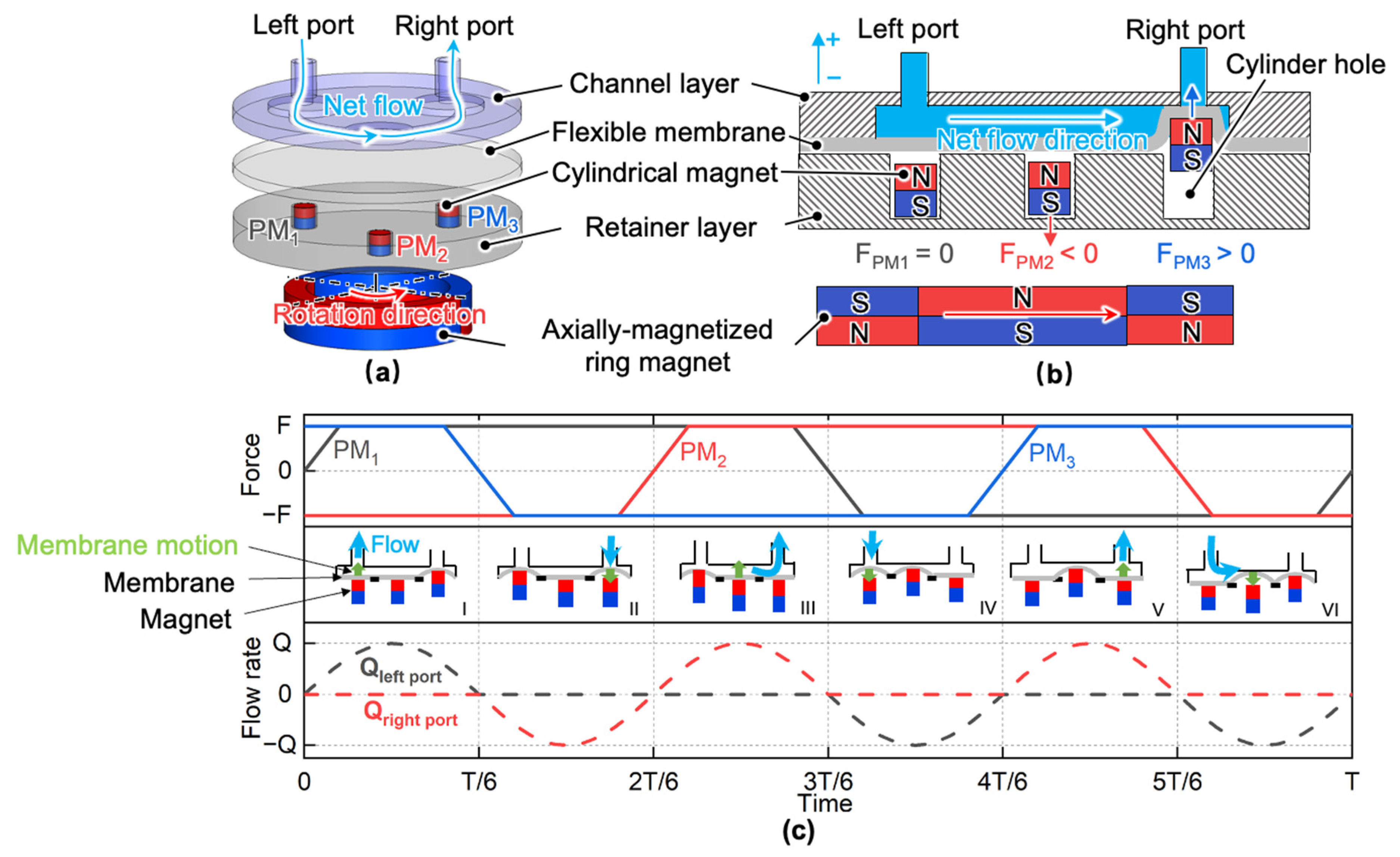
2. Proposal of a Disposable High-Density Bi-Directional Electromagnetic Micropump
3. Pump Design and Fabrication
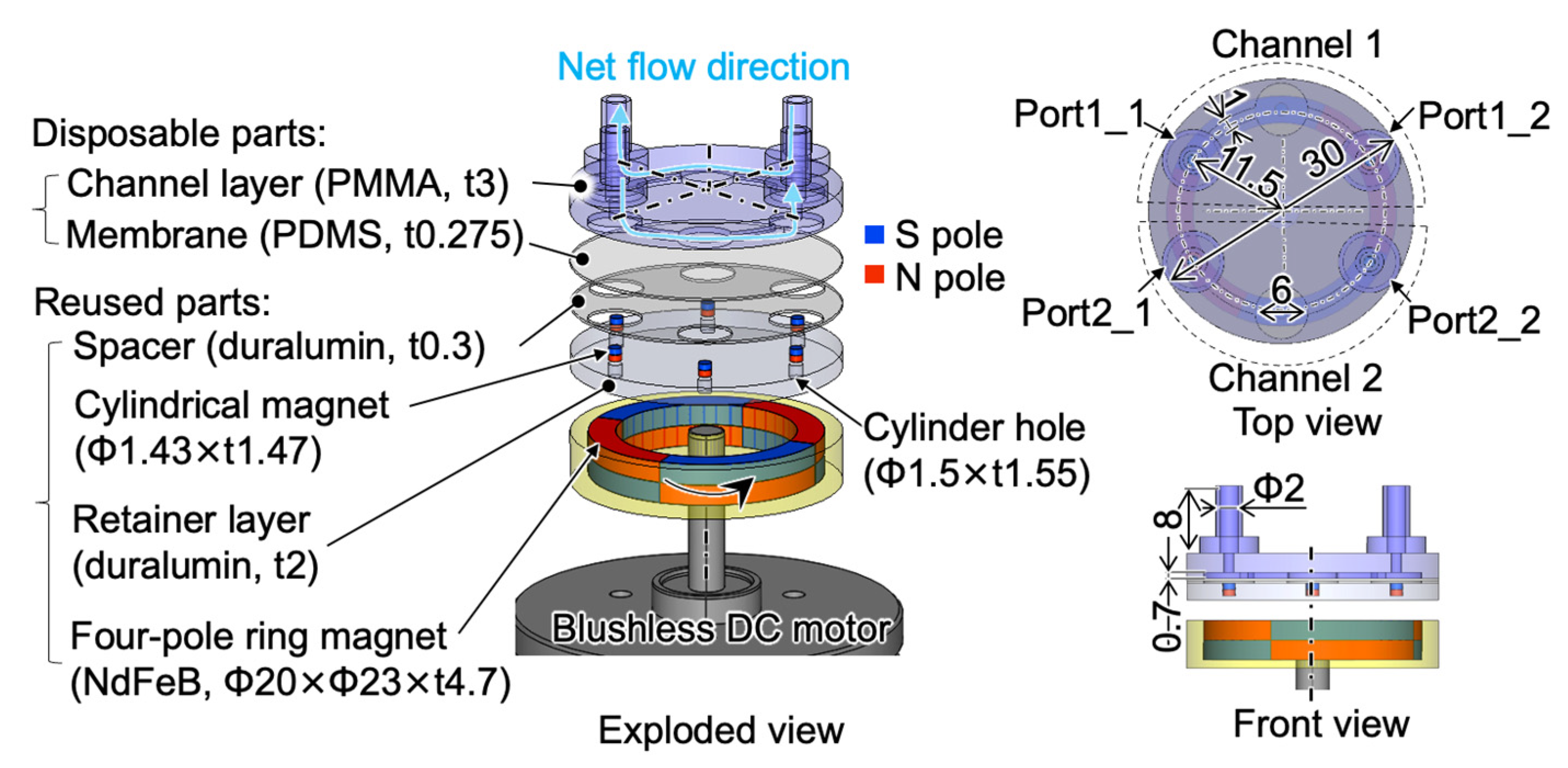
3.1. Configuration of a Large-Scale Micropump
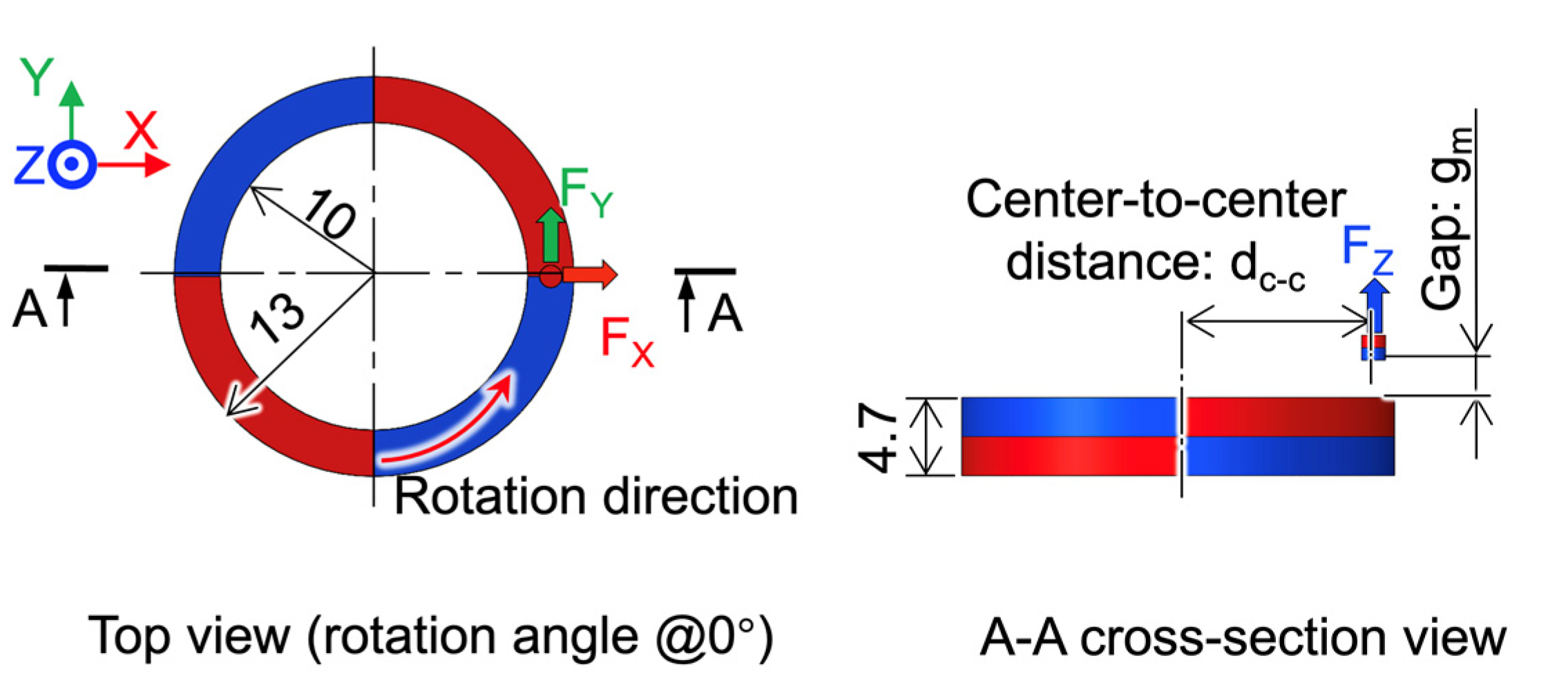
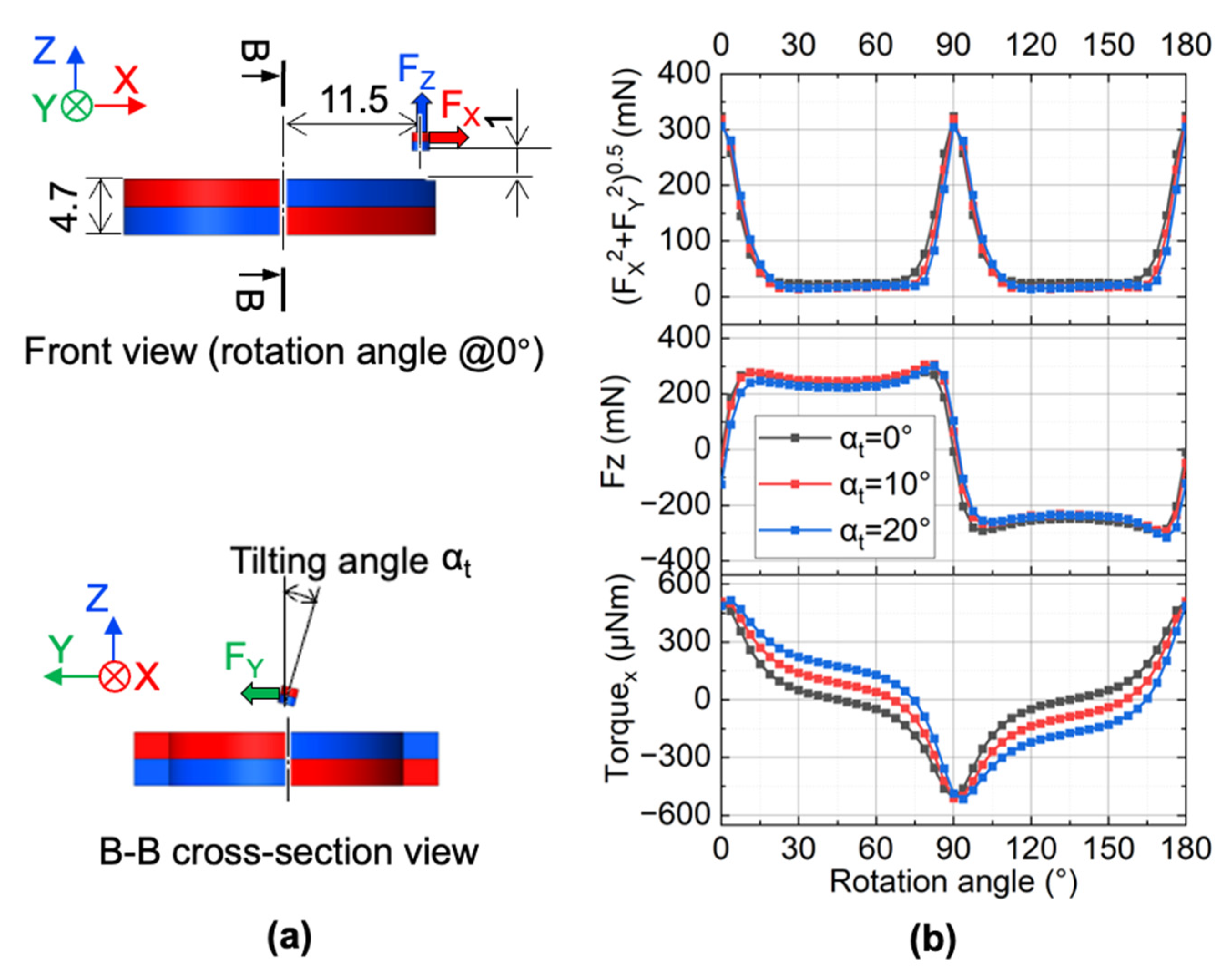
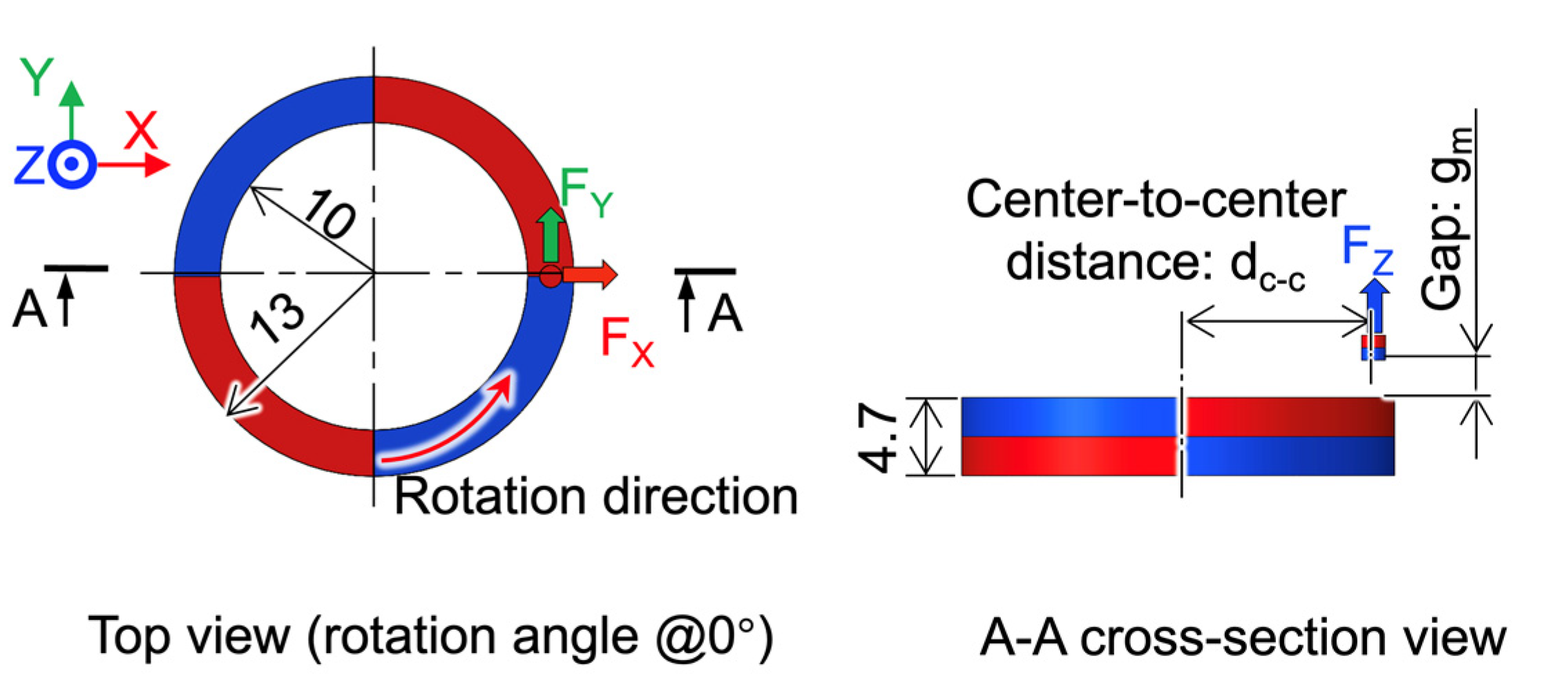
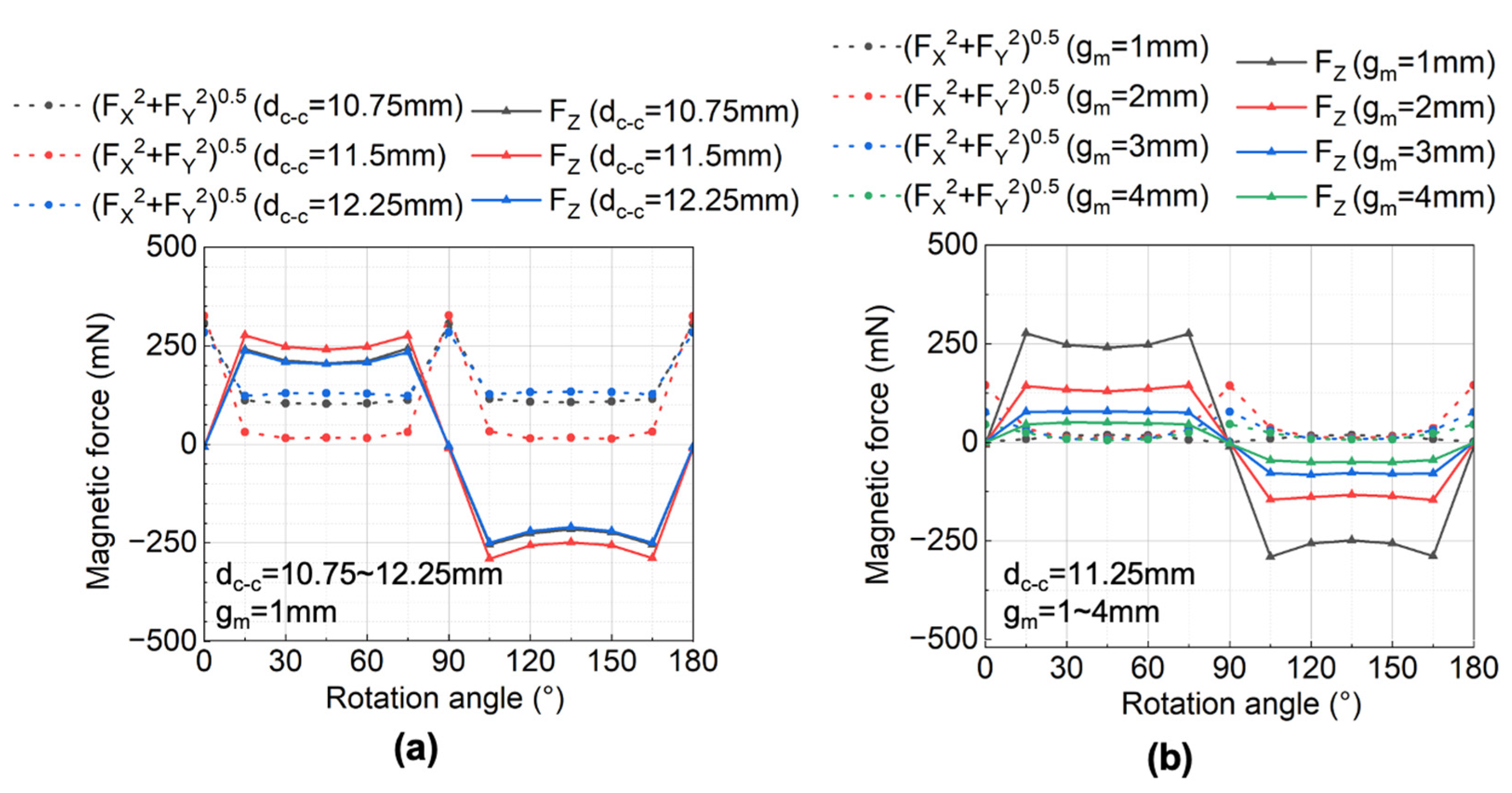
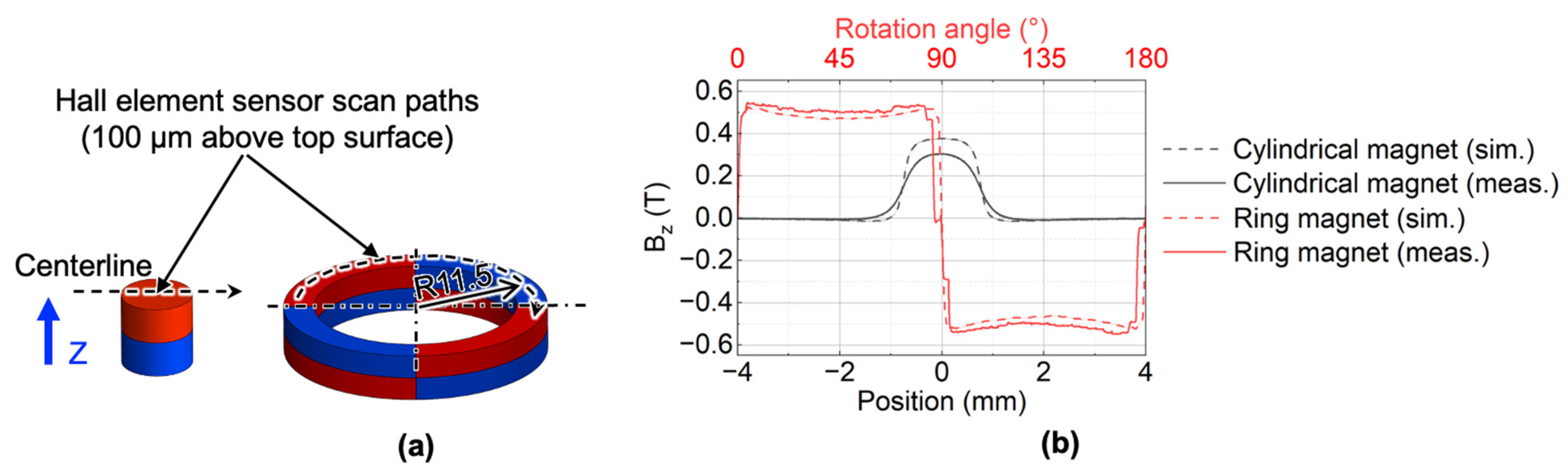
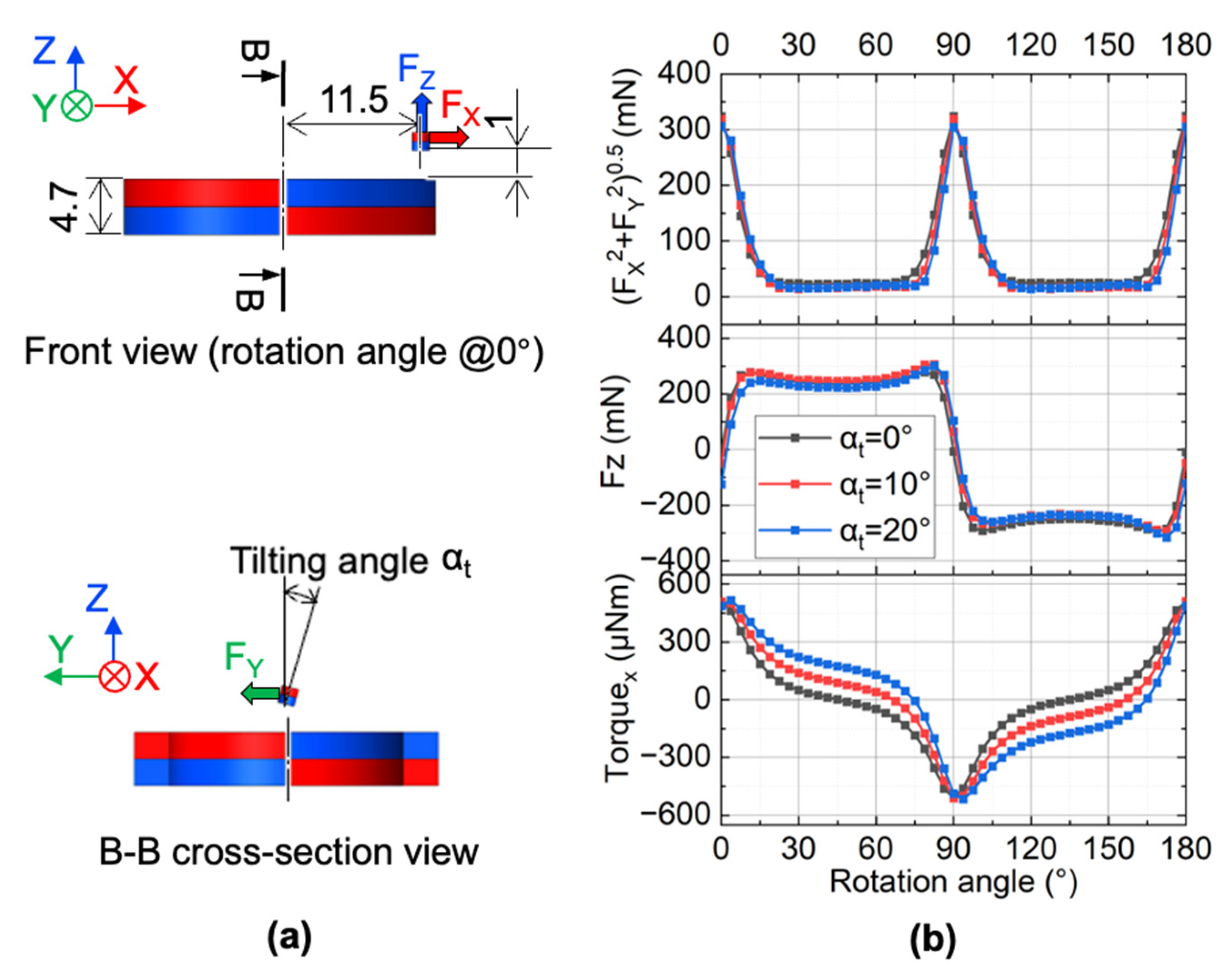
3.2. Magnet Coupling Simulation
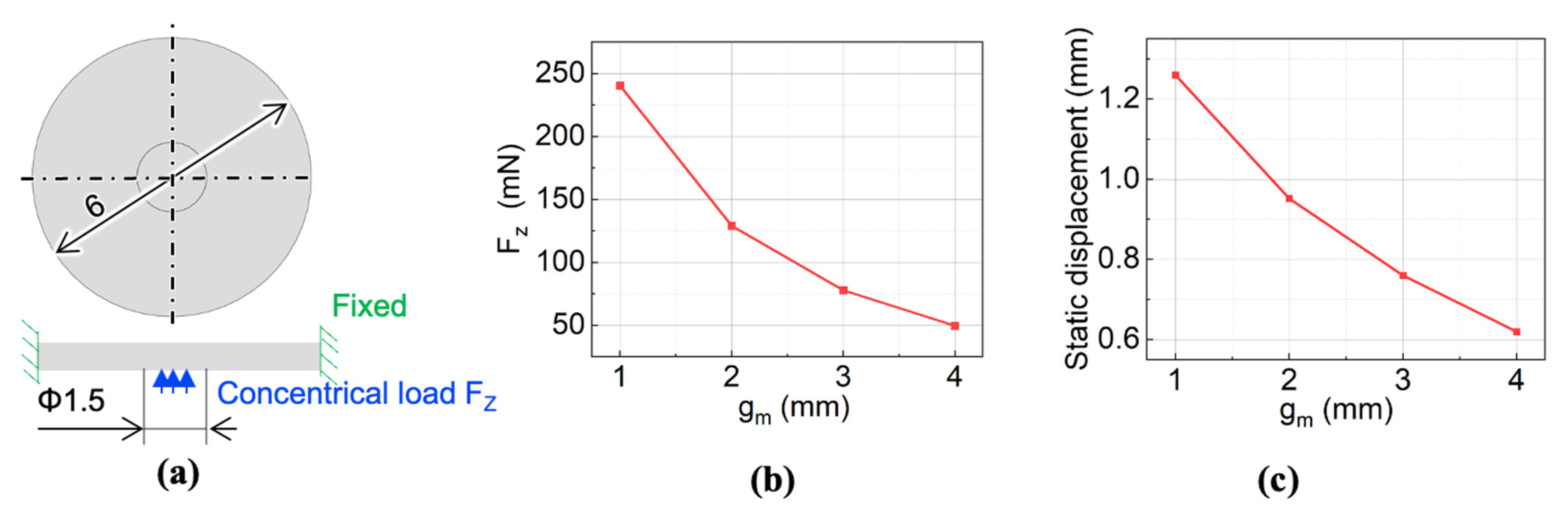
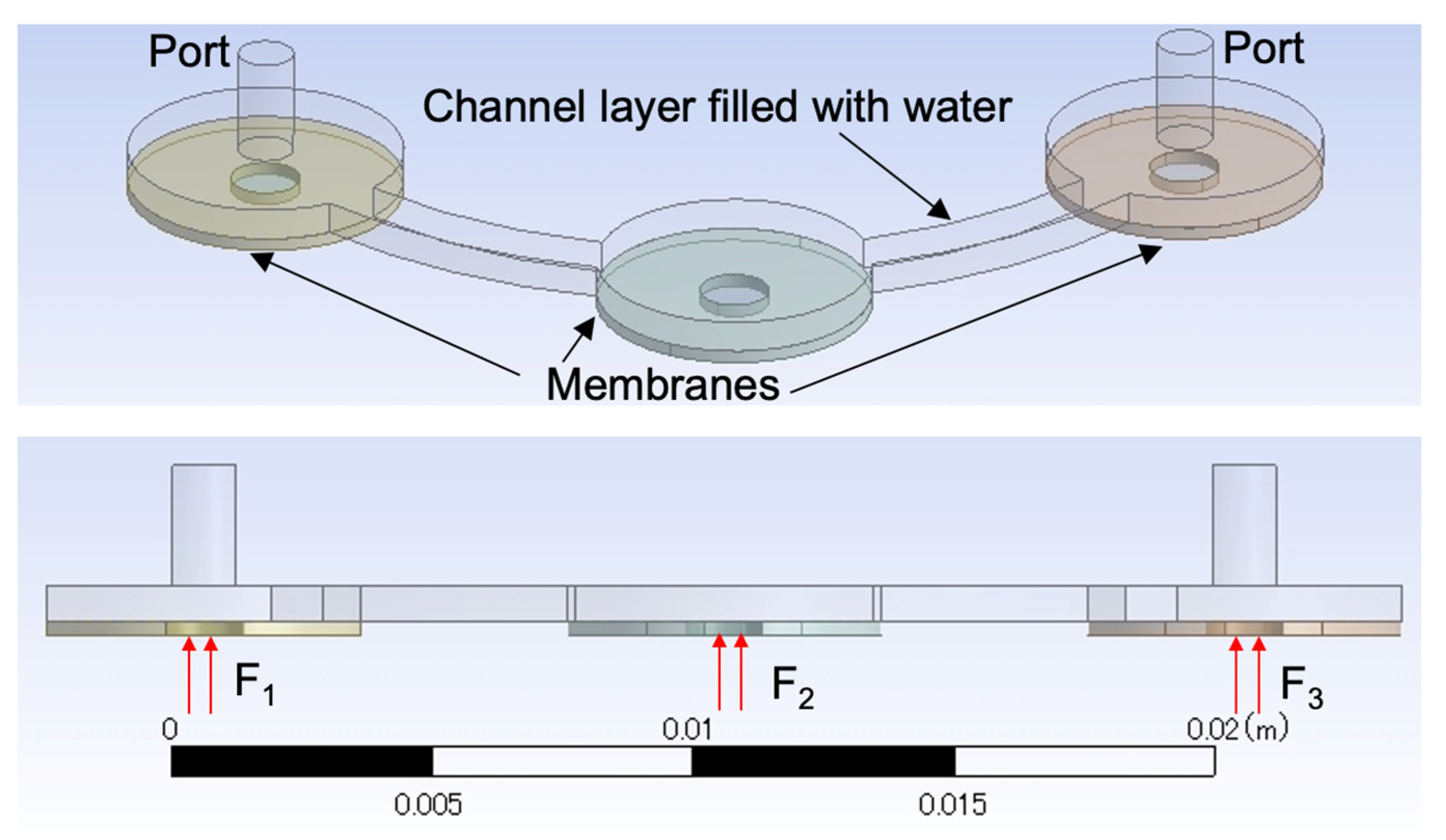
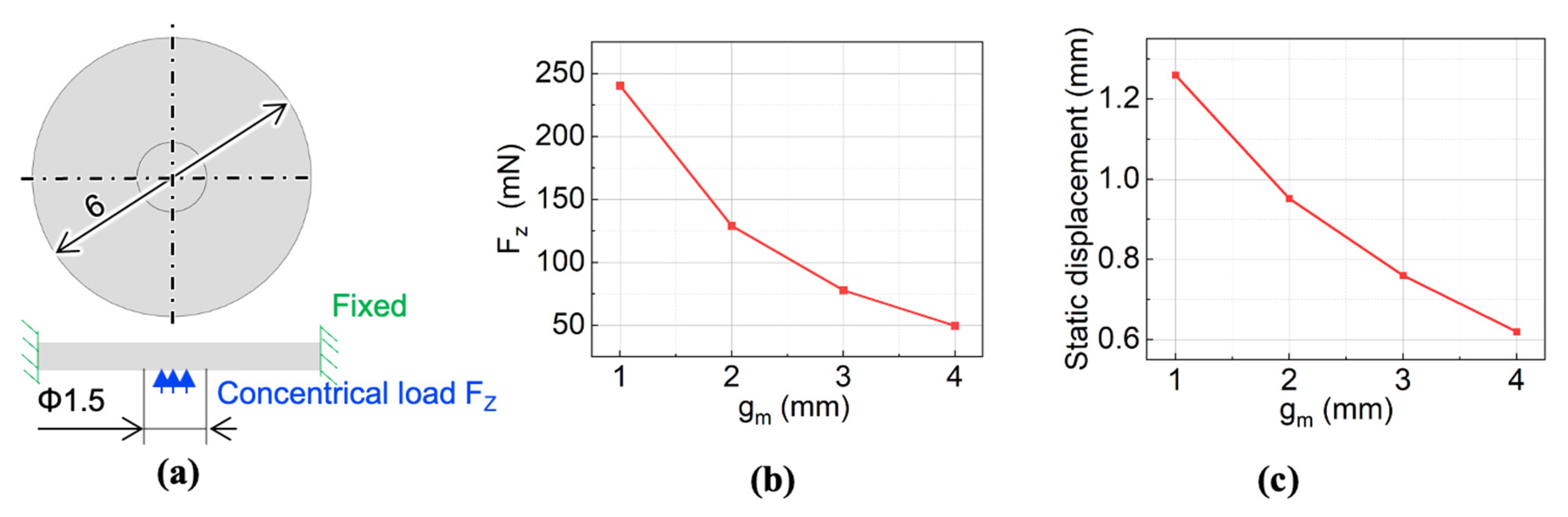
3.3. Membrane Static Displacement Simulation
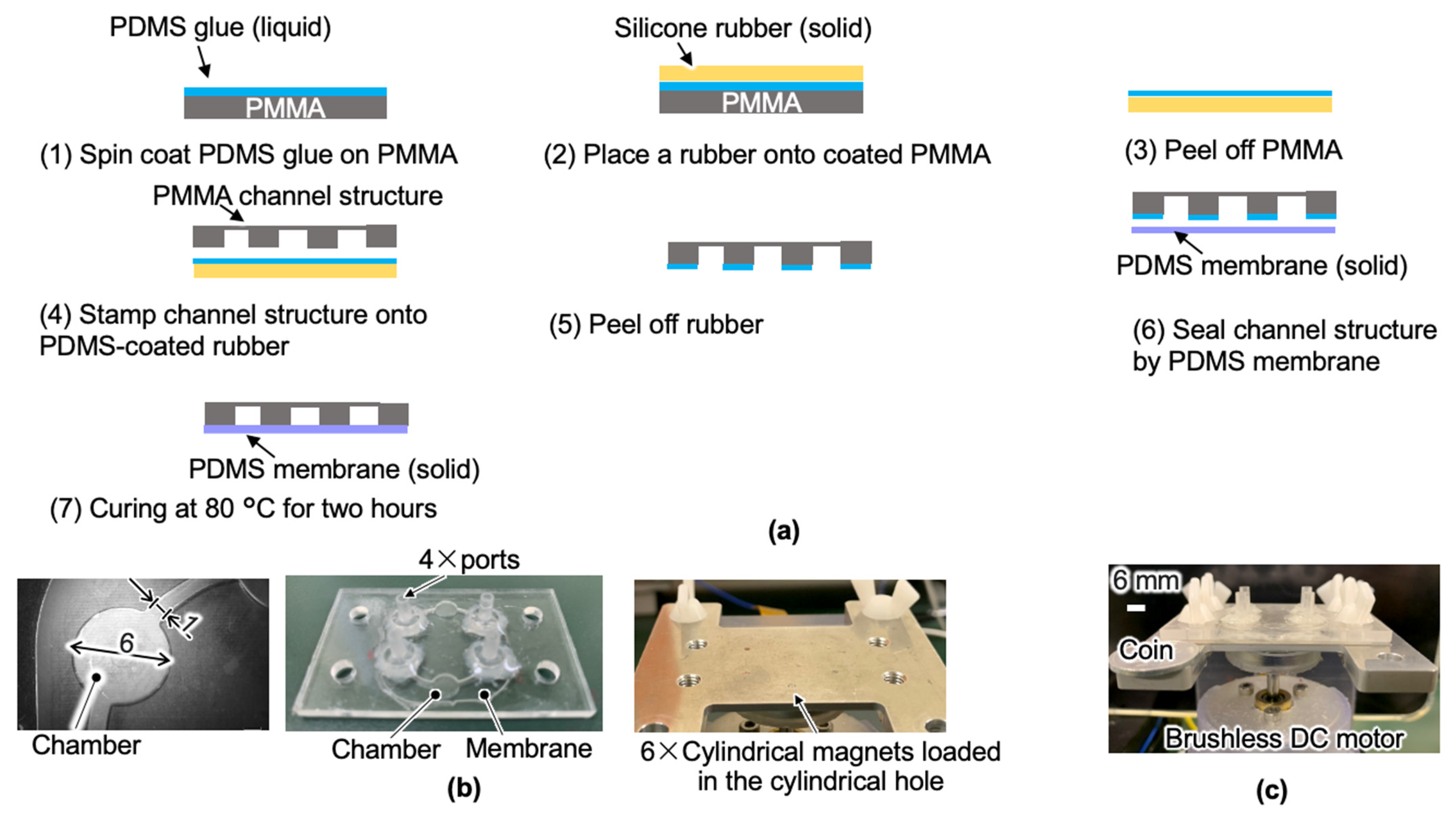
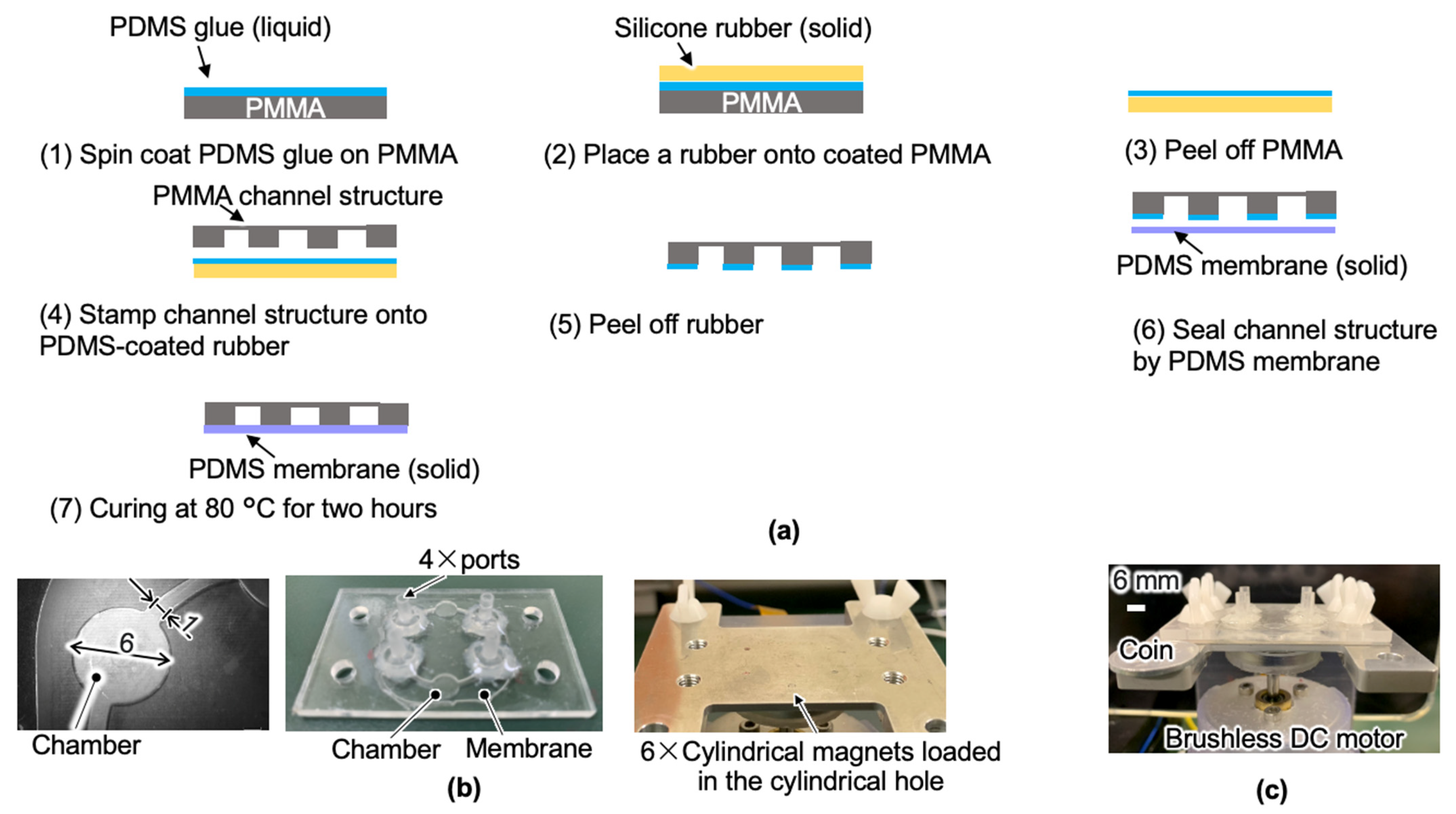
3.4. Fabrication
4. Experimental Evaluation
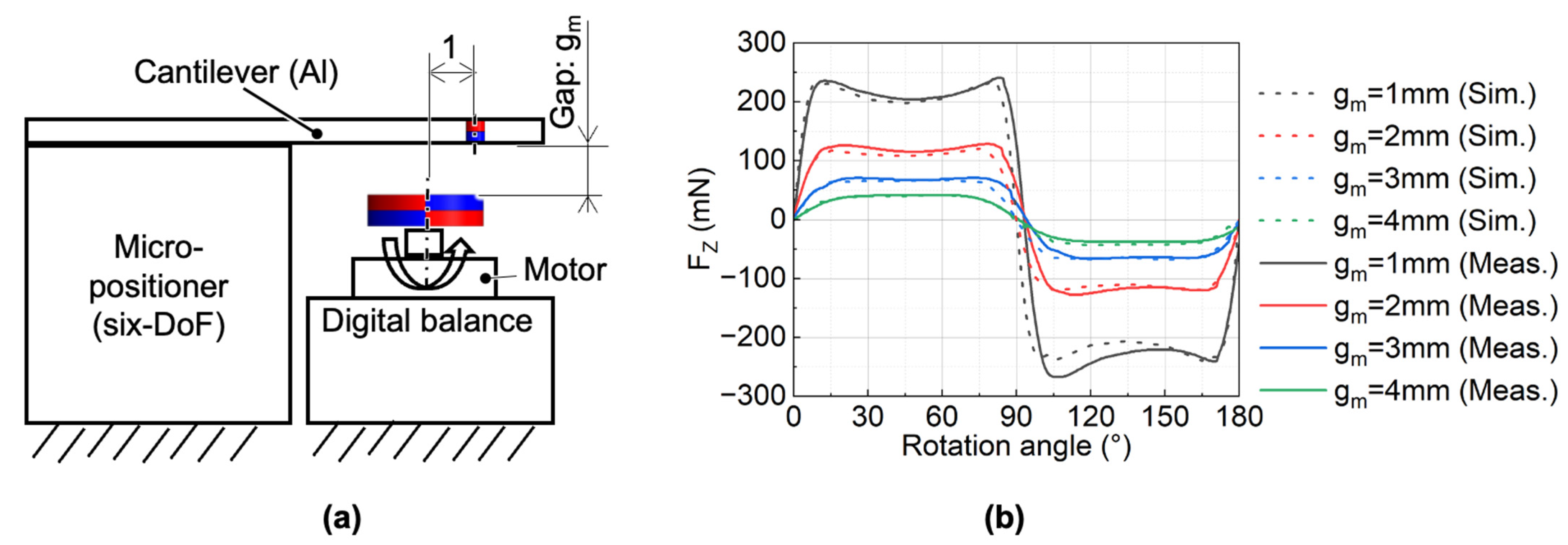
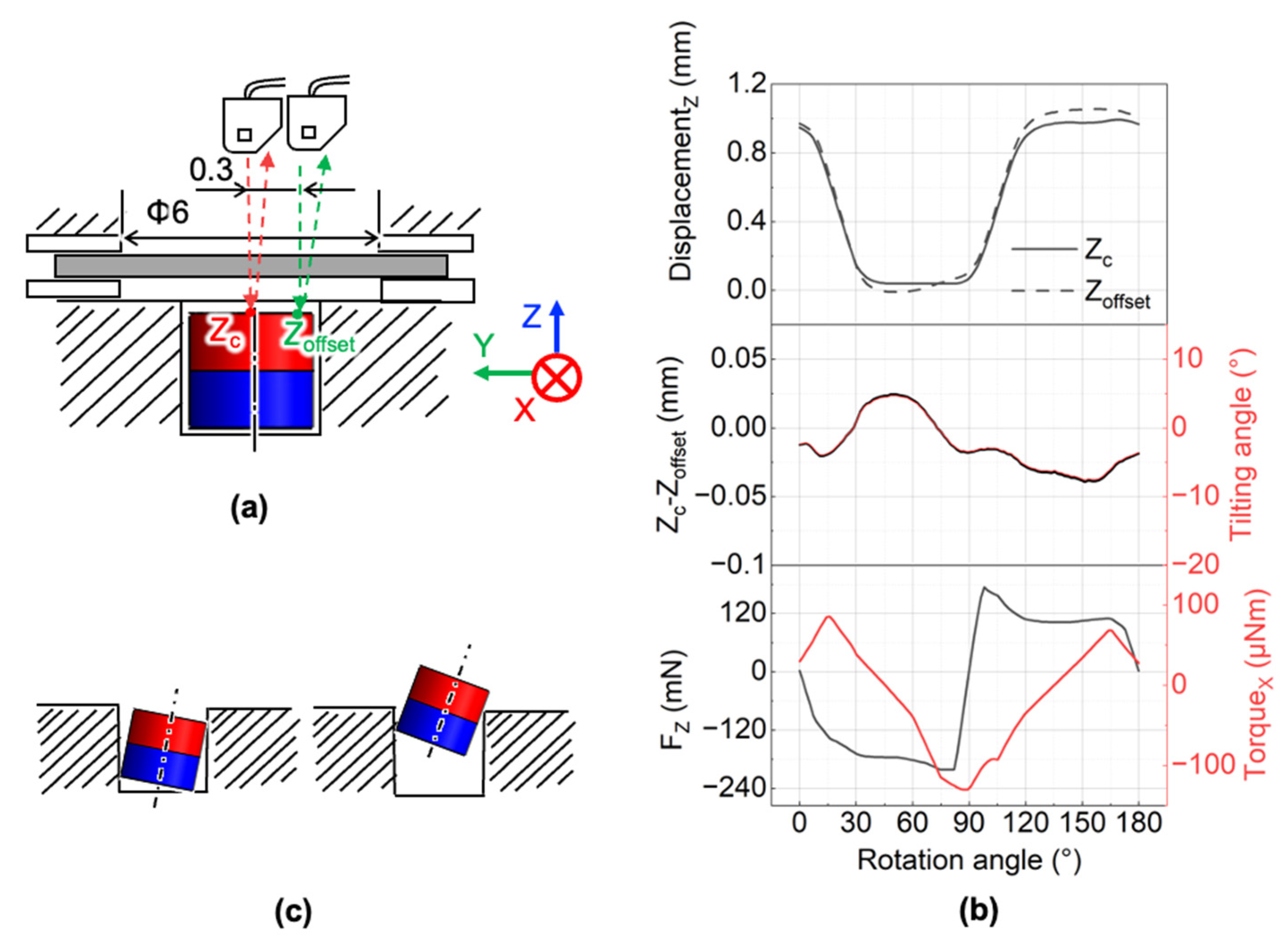
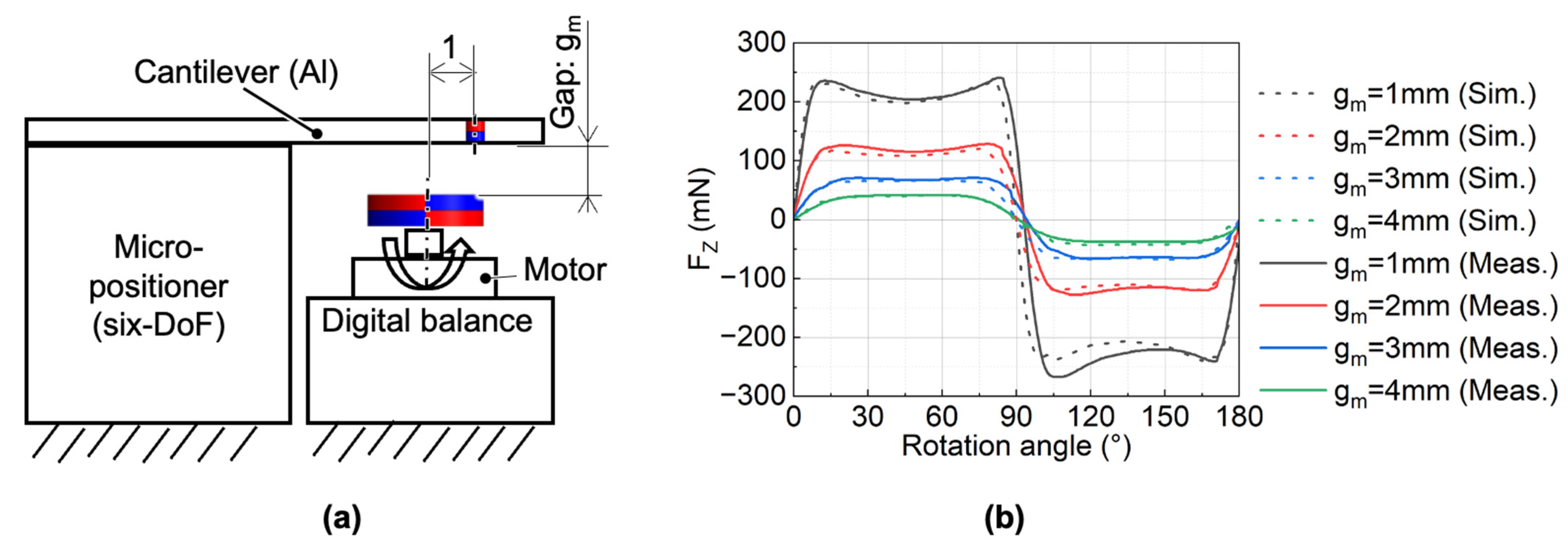
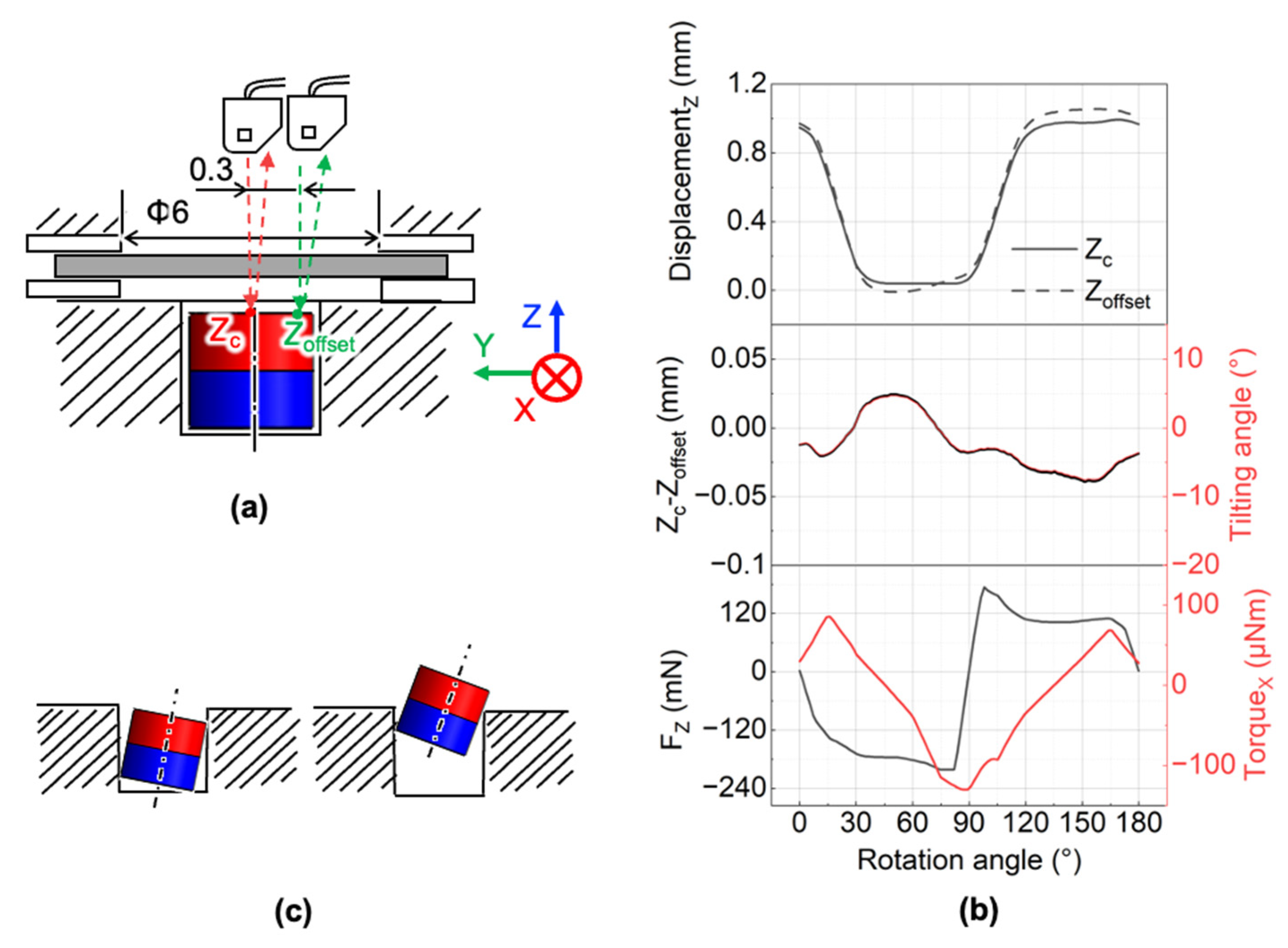
4.1. Measurement of the Static Magnetic Force
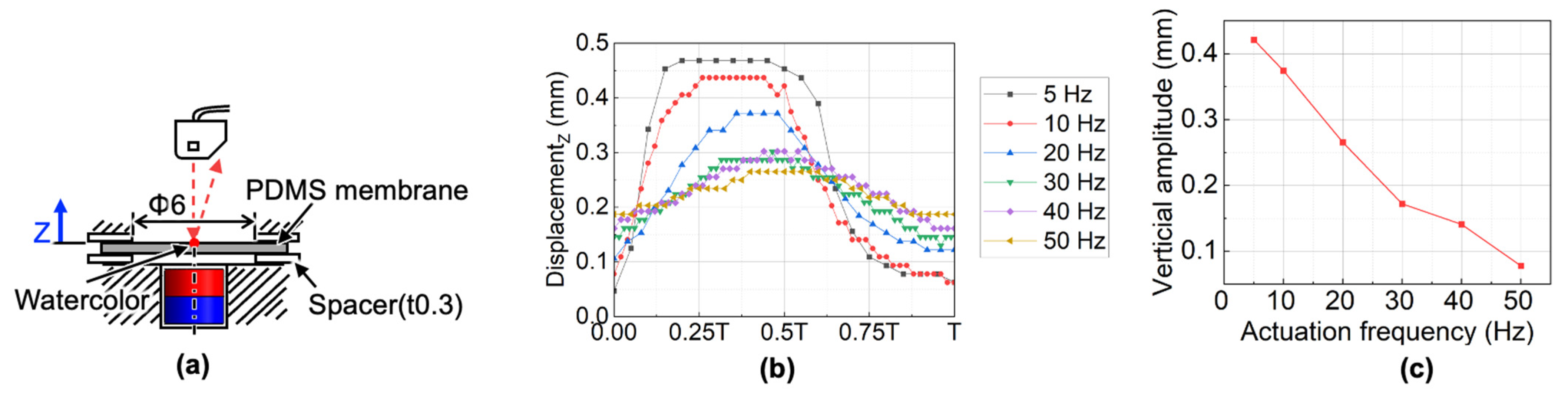
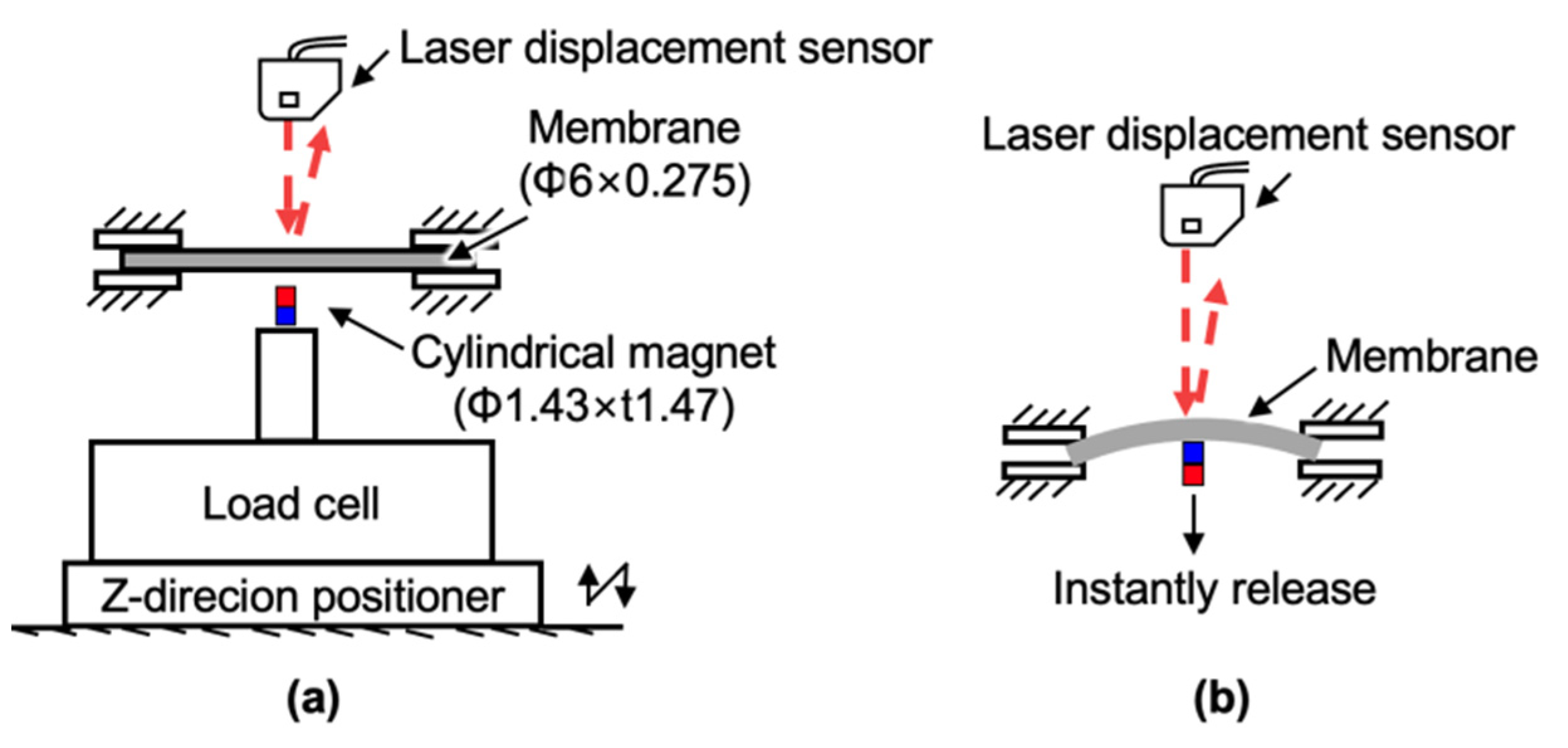
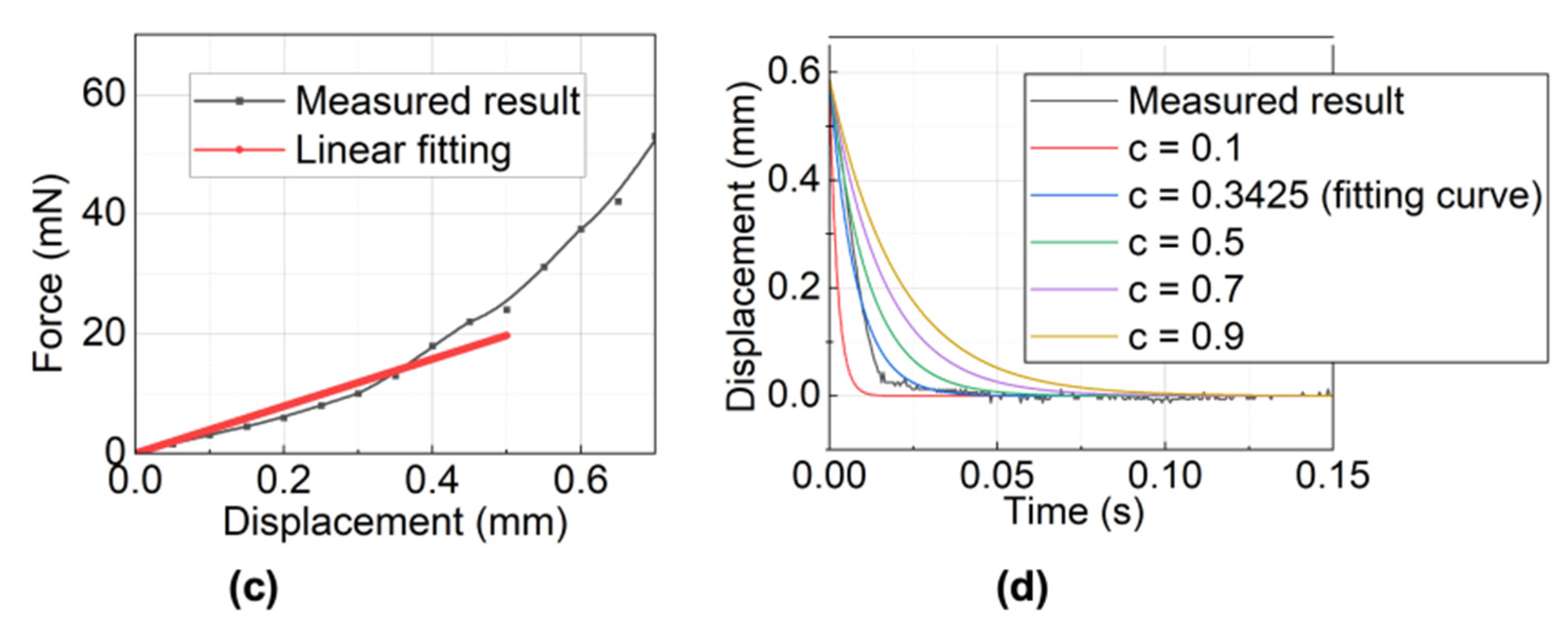
4.2. Measurement and Modelling of the Membrane Dynamic Response
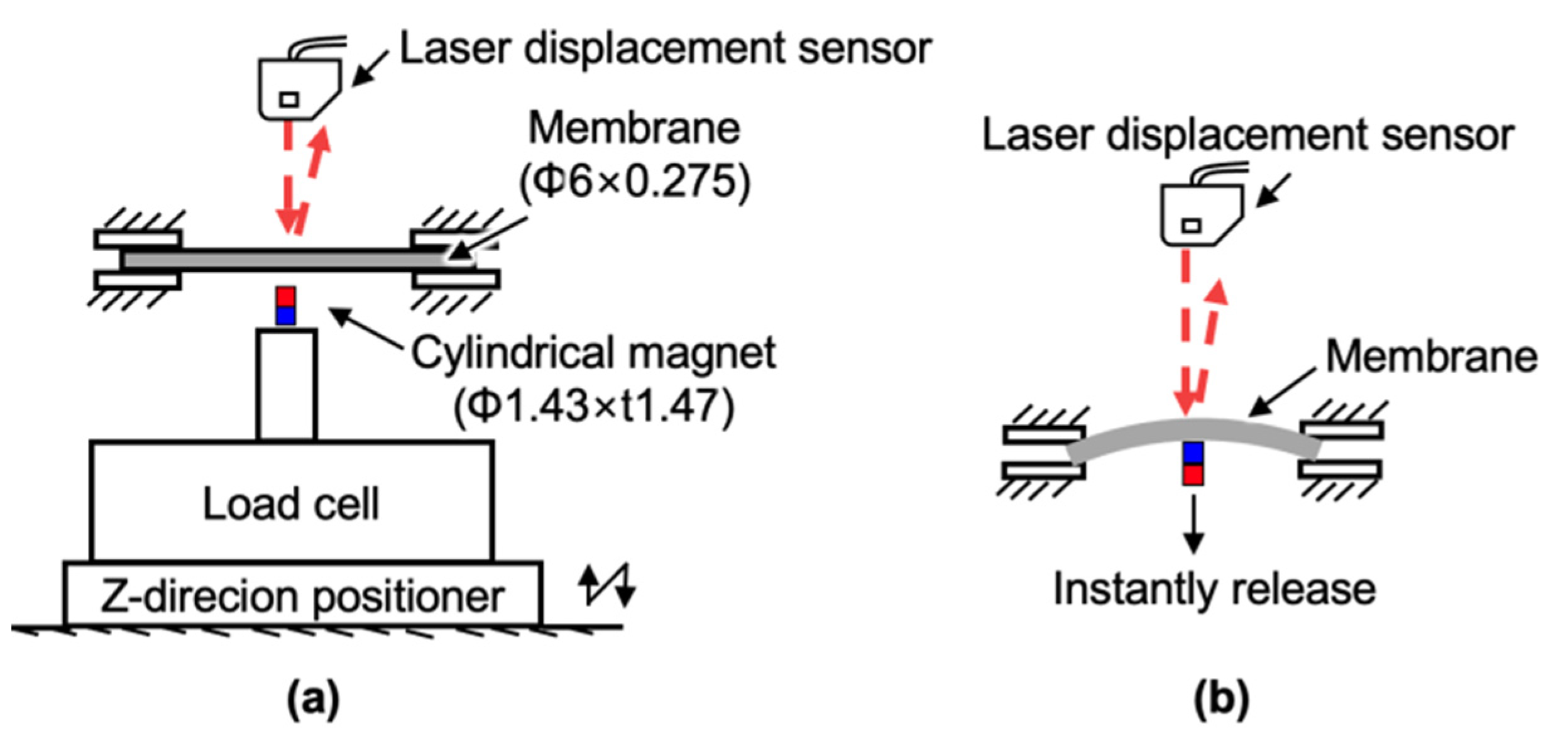
4.2.1. Setups for Measuring the Membrane Dynamic Response and Identifying Its Model Parameters
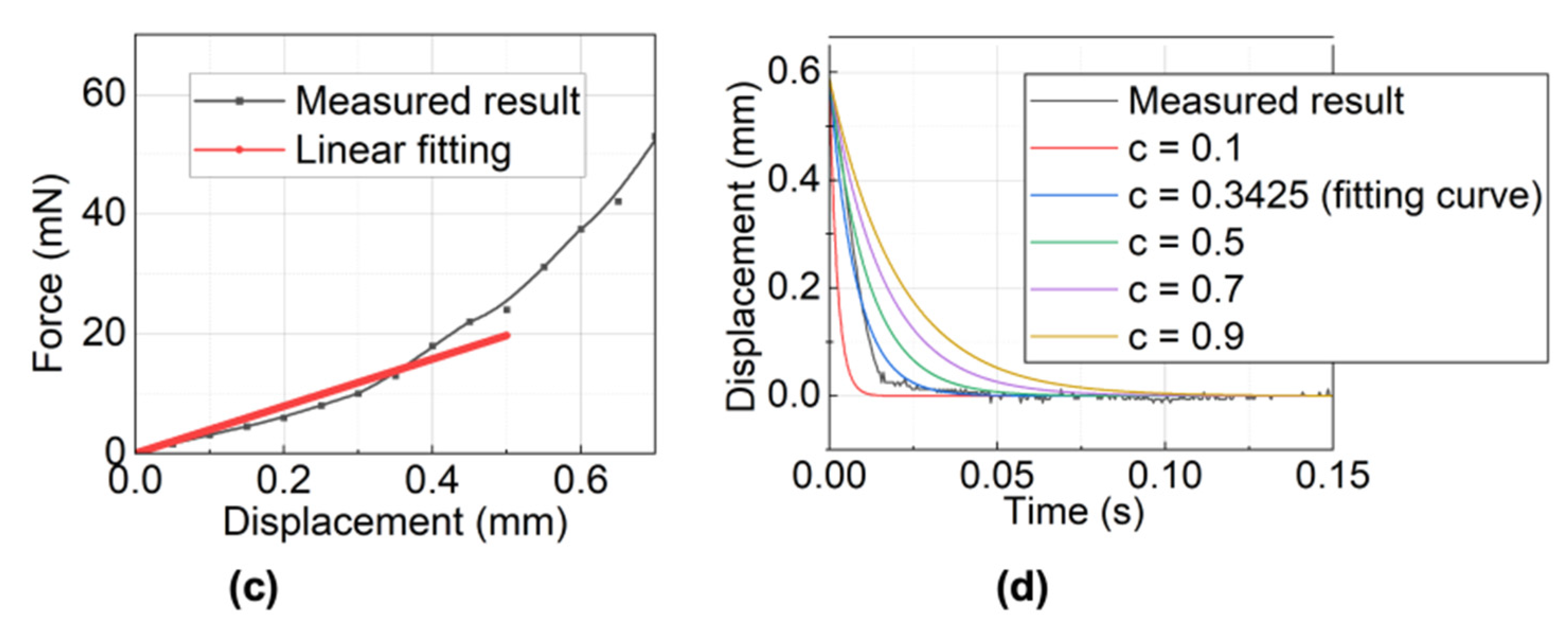
4.2.2. Measurement Results of the Membrane Dynamic Response and Model Parameters
4.3. Measurement of the Magnet Dynamic Response
4.3.1. Setup for Measuring the Magnet Dynamic Response
4.3.2. Measurement Results of the Magnet Dynamic Response
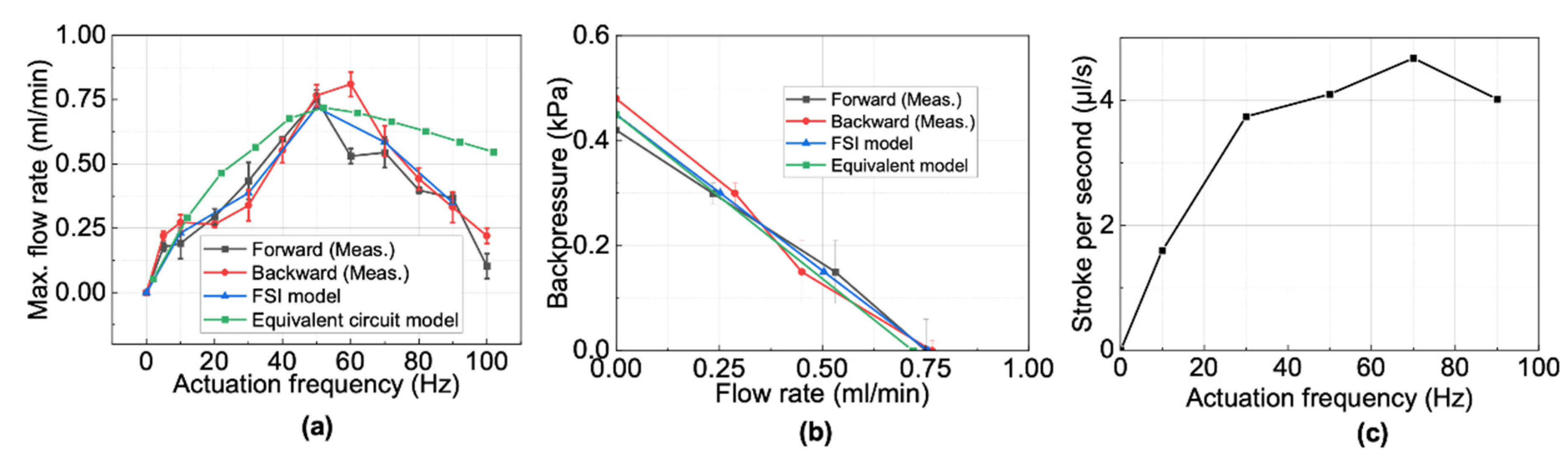
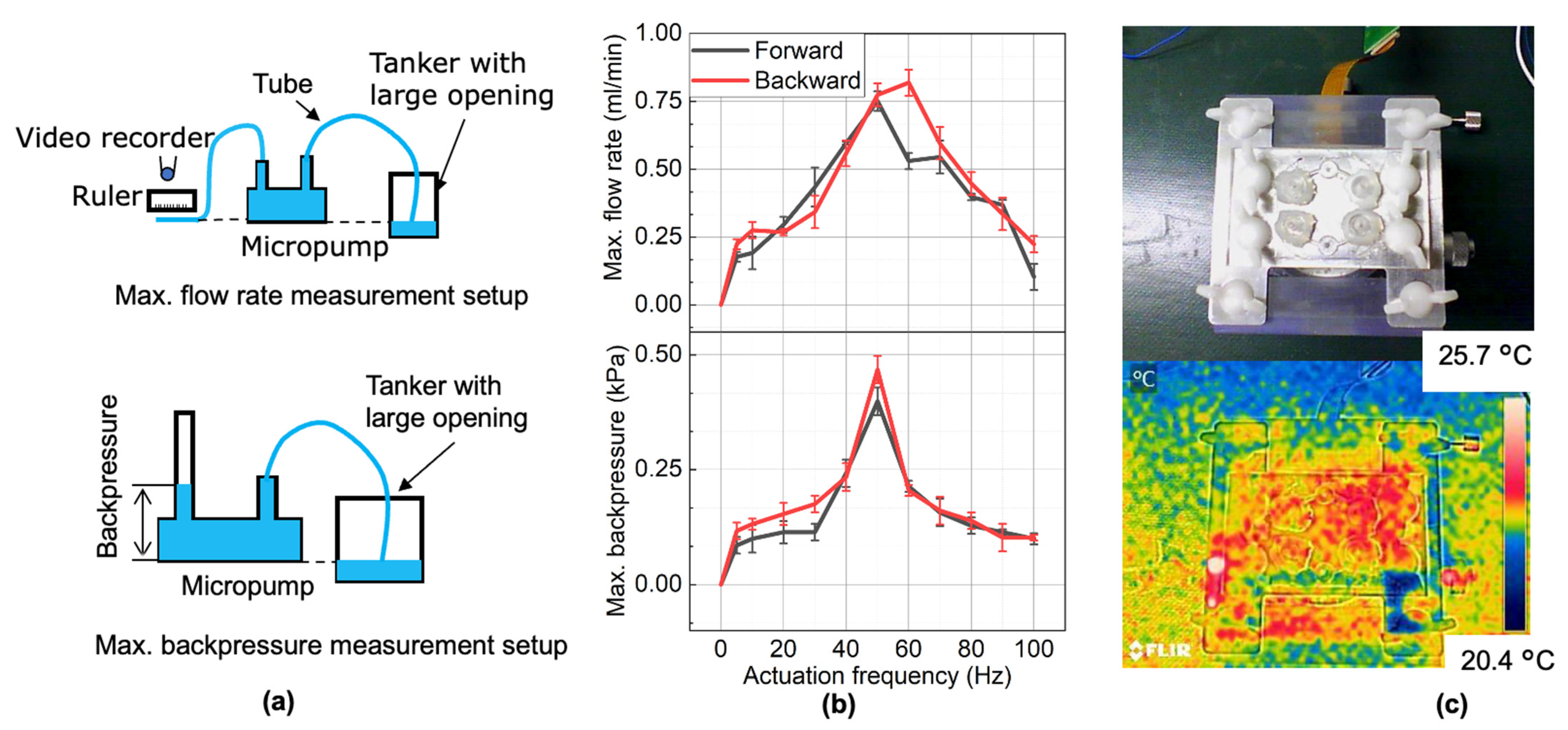
4.4. Pump Performance
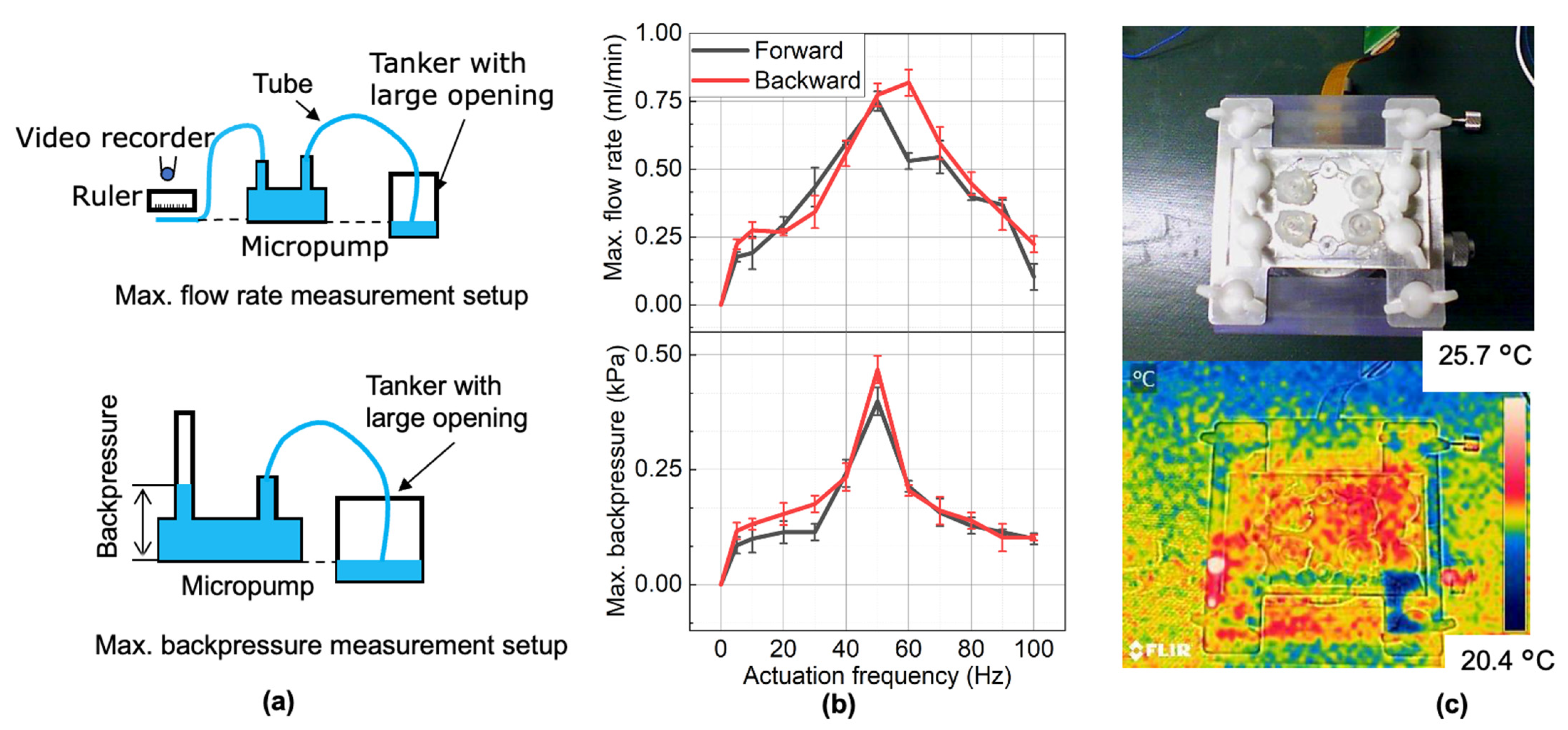
4.4.1. Flow Rate, Pressure, and Pump Temperature during Continuous Operation
4.4.2. Applicability of the Prototype Pump to Point-of-Care PCR
5. Pump Modeling
5.1. Modeling Overview
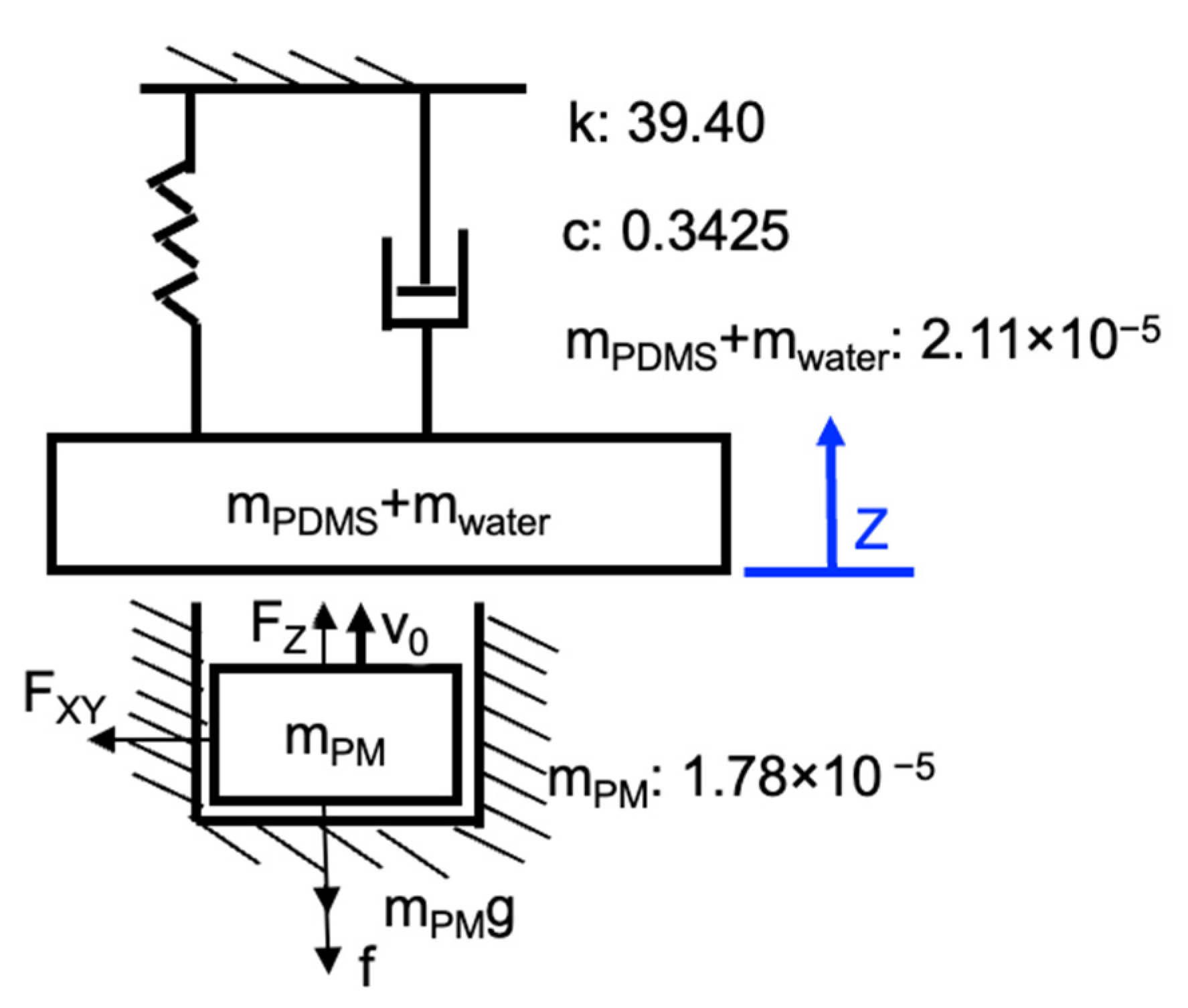
5.2. Dynamic Modeling of Magnet Coupling and Membrane
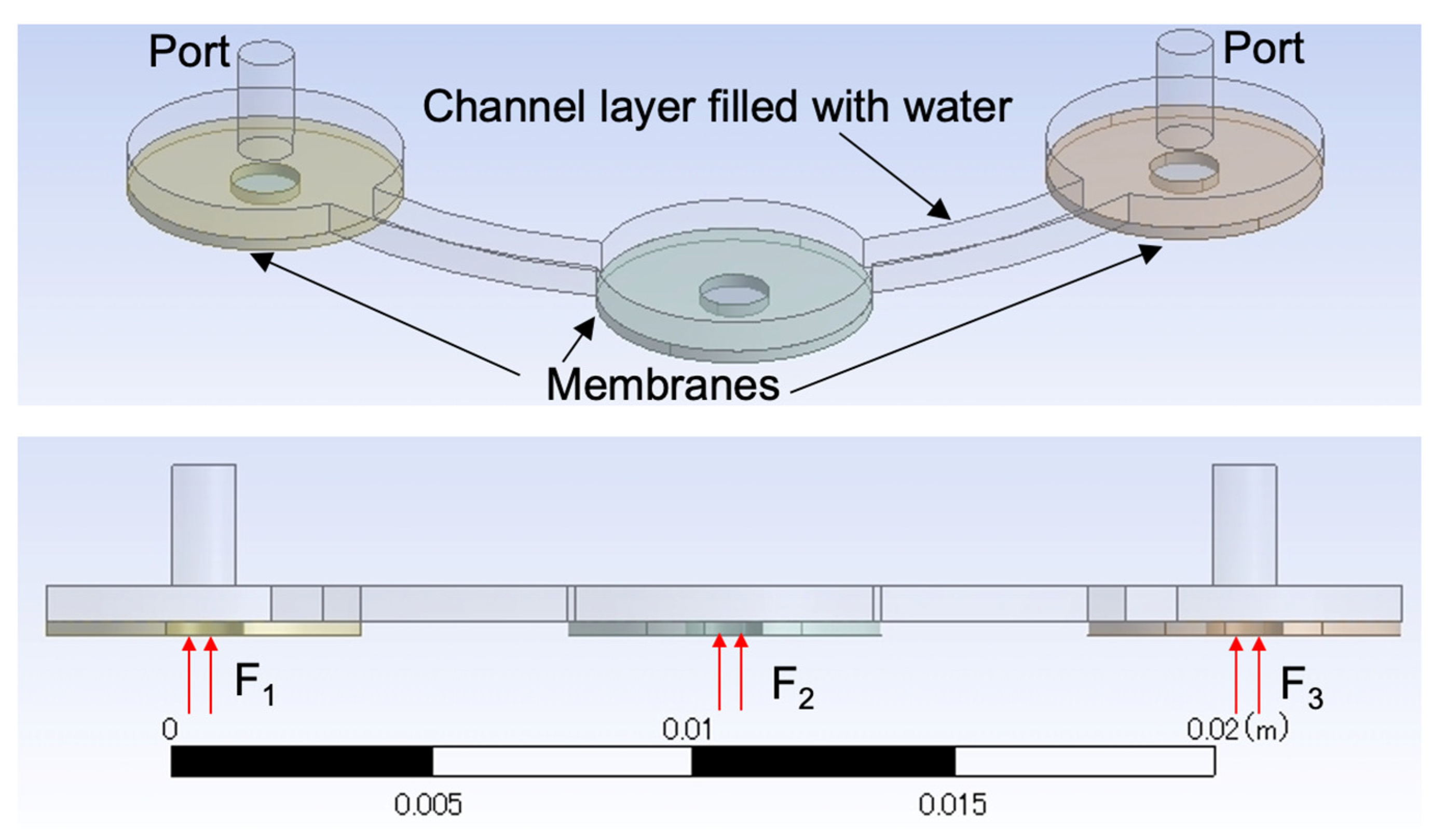
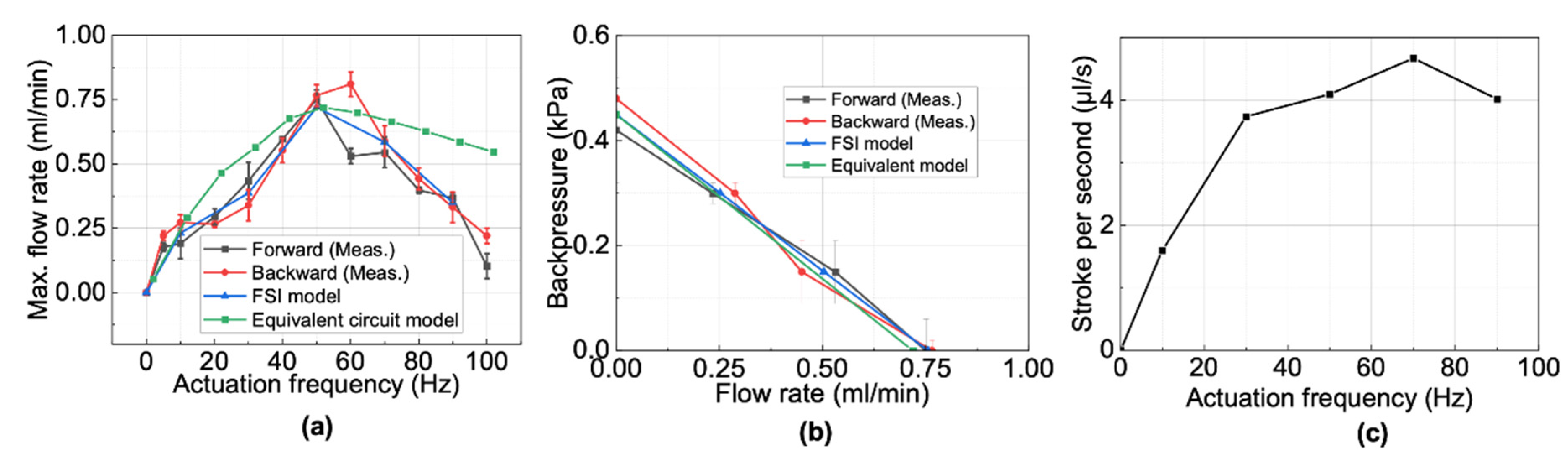
5.3. Pump Simulation Using the Fluid–Structure Interaction (FSI) Method
6. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alaeddini, R. Forensic implications of PCR inhibition—A review. Forensic Sci. Int. Genet. 2012, 6, 297–305. [Google Scholar] [CrossRef] [PubMed]
- Yohe, S.; Thyagarajan, B. Review of Clinical Next-Generation Sequencing. Arch. Pathol. Lab. Med. 2017, 141, 1544–1557. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Rothman, R.E. PCR-based diagnostics for infectious diseases: Uses, limitations, and future applications in acute-care settings. Lancet Infect. Dis. 2004, 4, 337–348. [Google Scholar] [CrossRef]
- Zhang, C.; Xing, D. Miniaturized PCR chips for nucleic acid amplification and analysis: Latest advances and future trends. Nucleic Acids Res. 2007, 35, 4223–4237. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.; Xing, D. Multichannel oscillatory-flow multiplex PCR microfluidics for high-throughput and fast detection of foodborne bacterial pathogens. Biomed. Microdevices 2011, 13, 885–897. [Google Scholar] [CrossRef]
- Nie, J.; Zhao, Y.; Peng, N. Multichannel oscillatory-flow PCR micro-fluidic chip with controllable temperature gradient. Microsyst. Technol. 2014, 21, 41–48. [Google Scholar] [CrossRef]
- Liu, D.; Liang, G.; Lei, X.; Chen, B.; Wang, W.; Zhou, X. Highly efficient capillary polymerase chain reaction using an oscillation droplet microreactor. Anal. Chim. Acta 2012, 718, 58–63. [Google Scholar] [CrossRef]
- Jang, L.-S.; Kan, W.-H. Peristaltic piezoelectric micropump system for biomedical applications. Biomed. Microdevices 2007, 9, 619–626. [Google Scholar] [CrossRef]
- Huang, C.-W.; Huang, S.-B.; Lee, G.-B. Pneumatic micropumps with serially connected actuation chambers. J. Micromech. Microeng. 2006, 16, 2265–2272. [Google Scholar] [CrossRef]
- Teymoori, M.M.; Abbaspour-Sani, E. Design and simulation of a novel electrostatic peristaltic micromachined pump for drug delivery applications. Sens. Actuators A Phys. 2005, 117, 222–229. [Google Scholar] [CrossRef]
- Amrani, I.; Cheriet, A.; Feliachi, M. Design and experimental investigation of a bi-directional valveless electromagnetic micro-pump. Sens. Actuators A Phys. 2018, 272, 310–317. [Google Scholar] [CrossRef]
- Chee, P.S.; Rahim, R.A.; Arsat, R.; Hashim, U.; Leow, P.L. Bidirectional flow micropump based on dynamic rectification. Sens. Actuators A Phys. 2013, 204, 107–113. [Google Scholar] [CrossRef]
- Rusli, M.; Chee, P.S.; Arsat, R.; Lau, K.X.; Leow, P.L. Electromagnetic actuation dual-chamber bidirectional flow micropump. Sens. Actuators A Phys. 2018, 282, 17–27. [Google Scholar] [CrossRef]
- Kim, E.-G.; Oh, J.-G.; Choi, B. A study on the development of a continuous peristaltic micropump using magnetic fluids. Sens. Actuators A Phys. 2006, 128, 43–51. [Google Scholar] [CrossRef]
- Du, M.; Ye, X.; Wu, K.; Zhou, Z. A Peristaltic Micro Pump Driven by a Rotating Motor with Magnetically Attracted Steel Balls. Sensors 2009, 9, 2611–2620. [Google Scholar] [CrossRef]
- Yobas, L.; Tang, K.-C.; Yong, S.-E.; Ong, E.K.-Z. A disposable planar peristaltic pump for lab-on-a-chip. Lab Chip 2008, 8, 660–662. [Google Scholar] [CrossRef]
- Pan, T.; Kai, E.; Stay, M.; Barocas, V.; Ziaie, B. A magnetically driven PDMS peristaltic micropump. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004. [Google Scholar] [CrossRef]
- Shen, M.; Dovat, L.; Gijs, M. Magnetic active-valve micropump actuated by a rotating magnetic assembly. Sens. Actuators B Chem. 2011, 154, 52–58. [Google Scholar] [CrossRef]
- Hsu, Y.C.; Le, N.B. Equivalent electrical network for performance characterization of piezoelectric peristaltic micropump. Microfluid. Nanofluid. 2008, 7, 237–248. [Google Scholar] [CrossRef]
- Qi, C.; Shinshi, T. A Disposable Bidirectional Micropump with Three Diaphragms Driven by a Rotating Multi-pole Magnet. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021. [Google Scholar] [CrossRef]
- Natarajan, S.; Chang-Yen, D.A.; Gale, B.K. Large-area, high-aspect-ratio SU-8 molds for the fabrication of PDMS microfluidic devices. J. Micromech. Microeng. 2008, 18, 045021. [Google Scholar] [CrossRef]
- Brister, P.C.; Weston, K.D. Patterned Solvent Delivery and Etching for the Fabrication of Plastic Microfluidic Devices. Anal. Chem. 2005, 77, 7478–7482. [Google Scholar] [CrossRef]
- Wu, H.; Huang, B.; Zare, R.N. Construction of microfluidic chips using polydimethylsiloxane for adhesive bonding. Lab Chip 2005, 5, 1393–1398. [Google Scholar] [CrossRef] [PubMed]
- Wygant, I.O.; Kupnik, M.; Khuri-Yakub, B.T. Analytically calculating membrane displacement and the equivalent circuit model of a circular CMUT cell. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008. [Google Scholar] [CrossRef]
- Géradin, M.; Rixen, D.J. Mechanical Vibrations: Theory and Application to Structural Dynamics, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar]
- Seghir, R.; Arscott, S. Extended PDMS stiffness range for flexible systems. Sens. Actuators A Phys. 2015, 230, 33–39. [Google Scholar] [CrossRef]
- Timoshenko, S.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill: New York, NY, USA, 1959. [Google Scholar]
- Formato, G.; Romano, R.; Formato, A.; Sorvari, J.; Koiranen, T.; Pellegrino, A.; Villecco, F. Fluid–Structure Interaction Modeling Applied to Peristaltic Pump Flow Simulations. Machines 2019, 7, 50. [Google Scholar] [CrossRef]
- Yang, Y.-J.; Liao, H.-H. Development and characterization of thermopneumatic peristaltic micropumps. J. Micromech. Microeng. 2009, 19, 025003. [Google Scholar] [CrossRef]
- Bourouina, T.; Grandchamp, J.-P. Modeling micropumps with electrical equivalent networks. J. Micromech. Microeng. 1996, 6, 398–404. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pump Components (For n-Channel Pump) | Disposed Components | Pump Density | Qmax; Hmax | Voltage | Power | Stable | |
|---|---|---|---|---|---|---|---|
| Unit | cm−2 | ml/min; kPa | V | W | |||
| Rulsi [13] | 2n bulky coil and 2n magnets | 2n magnets and fluidic part | 0.16 | 0.068; 1.2 | 0.64 | 0.486n | Yes |
| Kim [14] | n motors, magnetic fluid | Magnetic fluid and fluidic part | 0.30 | 0.0038; / | / | / | No |
| Du [16] | n motors, 3n steel balls and 3n PMs | Fluidic part | 0.07 | 5; 10 | 12 | / | No |
| Shen [18] | n motors, 3n cylindrical magnets, 6n arc magnets | All the component except motor | 0.10 | 2.4; 6.6 | 0.7 | 0.02n | Yes |
| This work | One motor, 3n cylindrical magnets, one 2n-pole ring magnet | Fluidic part | 0.14n | 0.86; 0.5 | 4.8 | 0.2 | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, C.; Sugita, N.; Shinshi, T. A Disposable Electromagnetic Bi-Directional Micropump Utilizing a Rotating Multi-Pole Ring Magnetic Coupling. Micromachines 2022, 13, 1565. https://doi.org/10.3390/mi13101565
Qi C, Sugita N, Shinshi T. A Disposable Electromagnetic Bi-Directional Micropump Utilizing a Rotating Multi-Pole Ring Magnetic Coupling. Micromachines. 2022; 13(10):1565. https://doi.org/10.3390/mi13101565
Chicago/Turabian StyleQi, Chao, Naohiro Sugita, and Tadahiko Shinshi. 2022. "A Disposable Electromagnetic Bi-Directional Micropump Utilizing a Rotating Multi-Pole Ring Magnetic Coupling" Micromachines 13, no. 10: 1565. https://doi.org/10.3390/mi13101565
APA StyleQi, C., Sugita, N., & Shinshi, T. (2022). A Disposable Electromagnetic Bi-Directional Micropump Utilizing a Rotating Multi-Pole Ring Magnetic Coupling. Micromachines, 13(10), 1565. https://doi.org/10.3390/mi13101565