
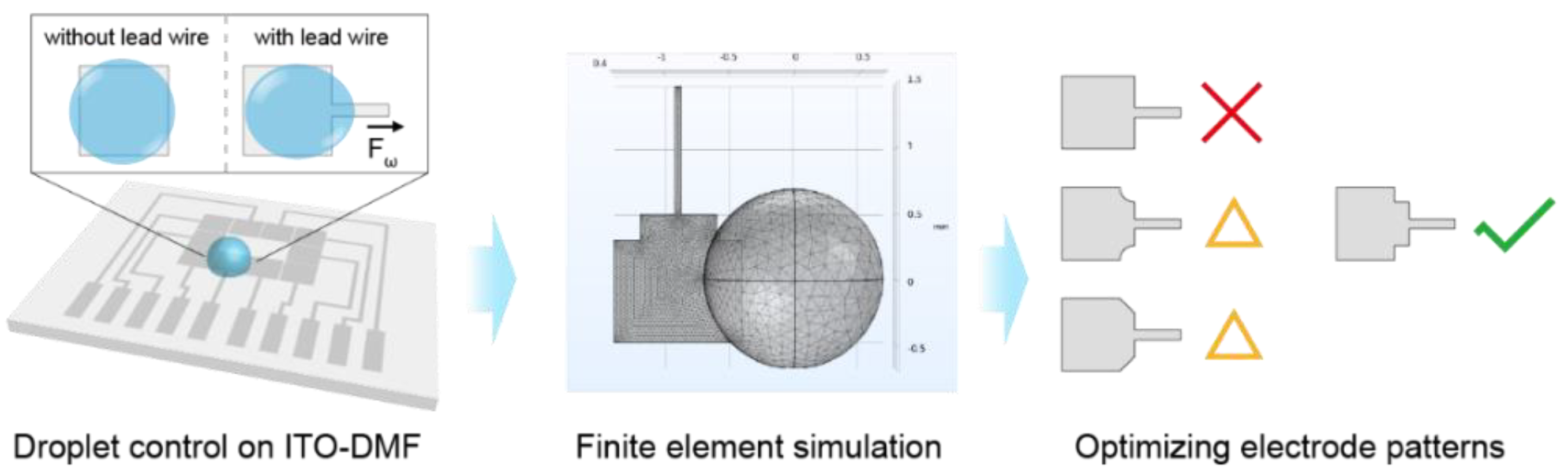
Optimization of Electrode Patterns for an ITO-Based Digital Microfluidic through the Finite Element Simulation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication of the ITO-DMF Chip
2.2. Droplet Manipulation with the ITO-DMF Platform
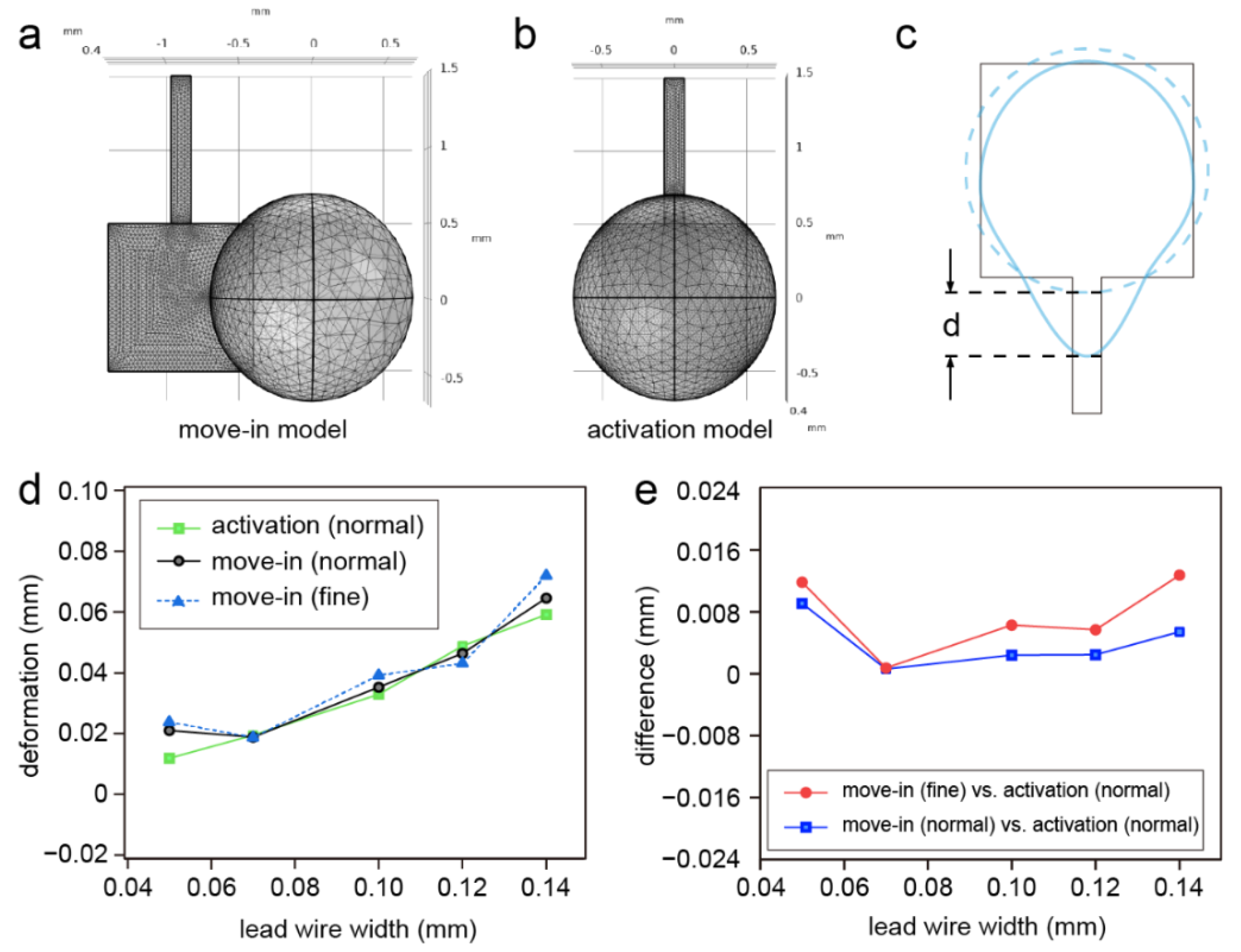
2.3. Finite Element Simulation
3. Results and Discussion
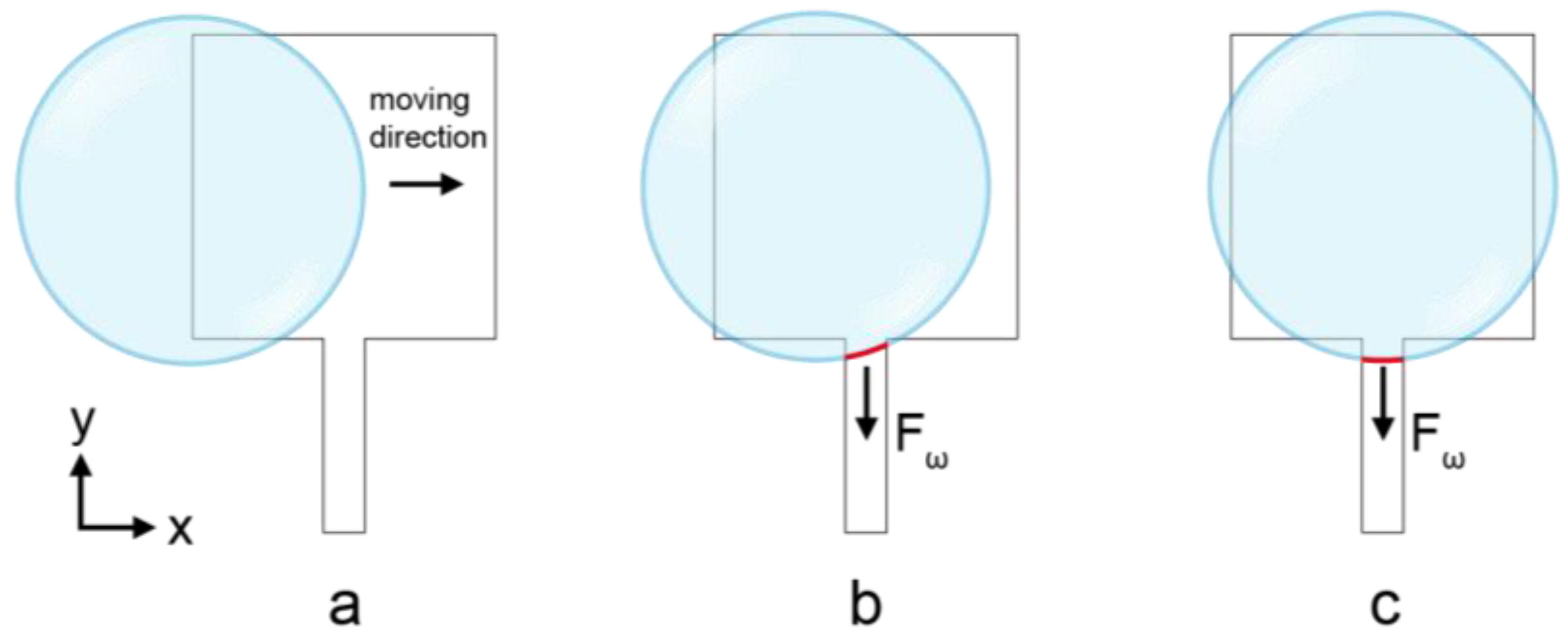
3.1. Theoretical Analysis of the Electrode with Lead Wire
3.2. Simulation of the Droplet Manipulation
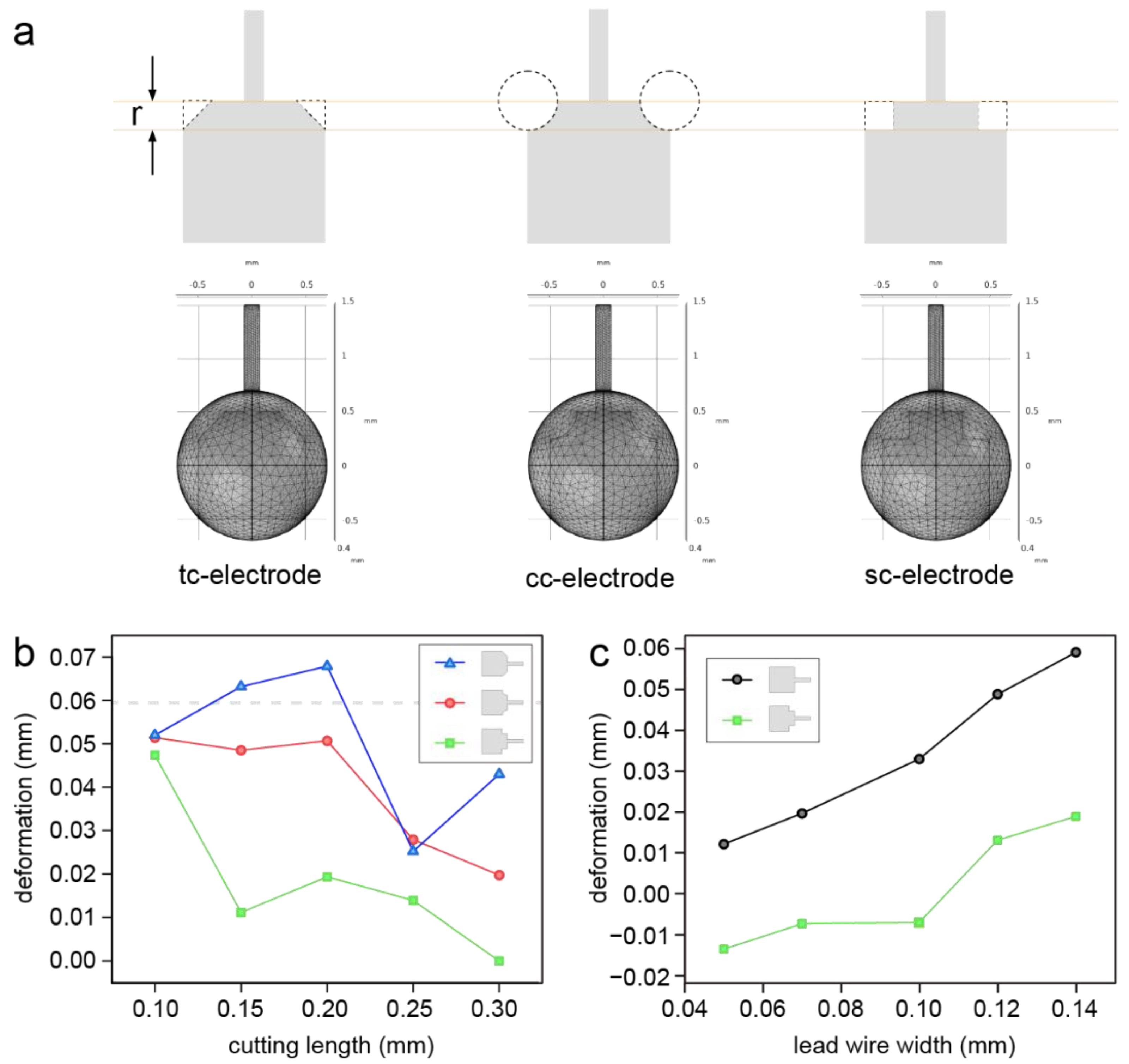
3.3. Optimization of the Electrode Pattern
3.4. Test of the Droplet Control on the ITO-DMF
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhong, J.; Riordon, J.; Wu, T.C.; Edwards, H.; Wheeler, A.R.; Pardee, K.; Aspuru-Guzik, A.; Sinton, D. When Robotics Met Fluidics. Lab Chip 2020, 20, 709–716. [Google Scholar] [CrossRef] [PubMed]
- Wang, W. Precise Droplet Dispensing in Digital Microfluidics with Dumbbell-Shaped Electrodes. Micromachines 2022, 13, 484. [Google Scholar] [CrossRef]
- Li, L.; Gu, Z.; Zhou, J.-L.; Yan, B.; Kong, C.; Wang, H.; Wang, H.-F. Intelligent Droplet Tracking with Correlation Filters for Digital Microfluidics. Chin. Chem. Lett. 2021, 32, 3416–3420. [Google Scholar] [CrossRef]
- Anderson, S.; Hadwen, B.; Brown, C. Thin-Film-Transistor Digital Microfluidics for High Value in Vitro Diagnostics at the Point of Need. Lab Chip 2021, 21, 962–975. [Google Scholar] [CrossRef] [PubMed]
- Grant, N.; Geiss, B.; Field, S.; Demann, A.; Chen, T.W. Design of a Hand-Held and Battery-Operated Digital Microfluidic Device Using EWOD for Lab-on-a-Chip Applications. Micromachines 2021, 12, 1065. [Google Scholar] [CrossRef] [PubMed]
- Ruan, Q.; Zou, F.; Wang, Y.; Zhang, Y.; Xu, X.; Lin, X.; Tian, T.; Zhang, H.; Zhou, L.; Zhu, Z.; et al. Sensitive, Rapid, and Automated Detection of DNA Methylation Based on Digital Microfluidics. ACS Appl. Mater. Interfaces 2021, 13, 8042–8048. [Google Scholar] [CrossRef]
- Wan, L.; Chen, T.; Gao, J.; Dong, C.; Wong, A.H.-H.; Jia, Y.; Mak, P.-I.; Deng, C.-X.; Martins, R.P. A Digital Microfluidic System for Loop-Mediated Isothermal Amplification and Sequence Specific Pathogen Detection. Sci. Rep. 2017, 7, 14586. [Google Scholar] [CrossRef]
- Sista, R.S.; Ng, R.; Nuffer, M.; Basmajian, M.; Coyne, J.; Elderbroom, J.; Hull, D.; Kay, K.; Krishnamurthy, M.; Roberts, C.; et al. Digital Microfluidic Platform to Maximize Diagnostic Tests with Low Sample Volumes from Newborns and Pediatric Patients. Diagnostics 2020, 10, 21. [Google Scholar] [CrossRef]
- Zhai, J.; Li, H.; Wong, A.H.-H.; Dong, C.; Yi, S.; Jia, Y.; Mak, P.-I.; Deng, C.-X.; Martins, R.P. A Digital Microfluidic System with 3D Microstructures for Single-Cell Culture. Microsyst Nanoeng. 2020, 6, 6. [Google Scholar] [CrossRef]
- Ruan, Q.; Ruan, W.; Lin, X.; Wang, Y.; Zou, F.; Zhou, L.; Zhu, Z.; Yang, C. Digital-WGS: Automated, Highly Efficient Whole-Genome Sequencing of Single Cells by Digital Microfluidics. Sci. Adv. 2020, 6, eabd6454. [Google Scholar] [CrossRef]
- Lamanna, J.; Scott, E.Y.; Edwards, H.S.; Chamberlain, M.D.; Dryden, M.D.M.; Peng, J.; Mair, B.; Lee, A.; Chan, C.; Sklavounos, A.A.; et al. Digital Microfluidic Isolation of Single Cells for -Omics. Nat. Commun. 2020, 11, 5632. [Google Scholar] [CrossRef]
- Zhang, Q.; Xu, X.; Lin, L.; Yang, J.; Na, X.; Chen, X.; Wu, L.; Song, J.; Yang, C. Cilo-Seq: Highly Sensitive Cell-in-Library-out Single-Cell Transcriptome Sequencing with Digital Microfluidics. Lab Chip 2022, 22, 1971–1979. [Google Scholar] [CrossRef]
- Keng, P.Y.; Chen, S.; Ding, H.; Sadeghi, S.; Shah, G.J.; Dooraghi, A.; Phelps, M.E.; Satyamurthy, N.; Chatziioannou, A.F.; Kim, C.-J.; et al. Micro-Chemical Synthesis of Molecular Probes on an Electronic Microfluidic Device. Proc. Natl. Acad. Sci. USA 2012, 109, 690–695. [Google Scholar] [CrossRef]
- Han, S.; Zhang, Q.; Zhang, X.; Liu, X.; Lu, L.; Wei, J.; Li, Y.; Wang, Y.; Zheng, G. A Digital Microfluidic Diluter-Based Microalgal Motion Biosensor for Marine Pollution Monitoring. Biosens. Bioelectron. 2019, 143, 111597. [Google Scholar] [CrossRef]
- Sklavounos, A.A.; Nemr, C.R.; Kelley, S.O.; Wheeler, A.R. Bacterial Classification and Antibiotic Susceptibility Testing on an Integrated Microfluidic Platform. Lab Chip 2021, 21, 4208–4222. [Google Scholar] [CrossRef]
- Qiu, W.; Nagl, S. Automated Miniaturized Digital Microfluidic Antimicrobial Susceptibility Test Using a Chip-Integrated Optical Oxygen Sensor. ACS Sens. 2021, 6, 1147–1156. [Google Scholar] [CrossRef]
- Gu, Z.; Luo, J.-J.; Ding, L.-W.; Yan, B.-Y.; Zhou, J.-L.; Wang, J.-G.; Wang, H.-F.; Kong, C. Colorimetric Sensing with Gold Nanoparticles on Electrowetting-Based Digital Microfluidics. Micromachines 2021, 12, 1423. [Google Scholar] [CrossRef]
- Nsabimana, J.; Wang, Y.; Ruan, Q.; Li, T.; Shen, H.; Yang, C.; Zhu, Z. An Electrochemical Method for a Rapid and Sensitive Immunoassay on Digital Microfluidics with Integrated Indium Tin Oxide Electrodes Coated on a PET Film. Analyst 2021, 146, 4473–4479. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Hsiung, Y.-K.; Chang, C.-Y.; Ou, S.-F. Parameter Optimization of Laser Direct-Write Patterning on Indium Tin Oxide/Polycarbonate Thin Films Using Multi-Performance Characteristics Analysis. Materials 2021, 14, 5808. [Google Scholar] [CrossRef]
- El-Said, W.A.; Al-Bogami, A.S.; Alshitari, W. Synthesis of Gold Nanoparticles@reduced Porous Graphene-Modified ITO Electrode for Spectroelectrochemical Detection of SARS-CoV-2 Spike Protein. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 264, 120237. [Google Scholar] [CrossRef]
- Wang, H.; Chen, L. Integrated Full-Range Droplet Actuation for Inkjet-Printed Digital Microfluidic Chip on Flexible Substrates. IEEE Trans. NanoBiosci. 2022, 21, 10–20. [Google Scholar] [CrossRef]
- Chu, T.-C.; Lu, Y.-W. Droplet Transportation through an Orifice on Electrode for Digital Microfluidics Modulations. Micromachines 2021, 12, 1385. [Google Scholar] [CrossRef]
- Tsai, H.-Y.; Hsu, C.-N.; Li, C.-R.; Lin, Y.-H.; Hsiao, W.-T.; Huang, K.-C.; Yeh, J.A. Surface Wettability and Electrical Resistance Analysis of Droplets on Indium-Tin-Oxide Glass Fabricated Using an Ultraviolet Laser System. Micromachines 2021, 12, 44. [Google Scholar] [CrossRef]
- Wang, W.; Rui, X.; Sheng, W.; Wang, Q.; Wang, Q.; Zhang, K.; Riaud, A.; Zhou, J. An Asymmetric Electrode for Directional Droplet Motion on Digital Microfluidic Platforms. Sens. Actuators B Chem. 2020, 324, 128763. [Google Scholar] [CrossRef]
- Jin, K.; Hu, C.; Hu, S.; Hu, C.; Li, J.; Ma, H. “One-to-Three” Droplet Generation in Digital Microfluidics for Parallel Chemiluminescence Immunoassays. Lab Chip 2021, 21, 2892–2900. [Google Scholar] [CrossRef]
- Guan, Y.; Tu, J.; Li, B.; Fu, J.; Zhu, M.; Chen, X.; Zhou, C. Stripped Electrode Based Electrowetting-on-Dielectric Digital Microfluidics for Precise and Controllable Parallel Microdrop Generation. Langmuir 2020, 36, 9540–9550. [Google Scholar] [CrossRef]
- Li, H.; Shen, R.; Dong, C.; Chen, T.; Jia, Y.; Mak, P.-I.; Martins, R.P. Turning on/off Satellite Droplet Ejection for Flexible Sample Delivery on Digital Microfluidics. Lab Chip 2020, 20, 3709–3719. [Google Scholar] [CrossRef]
- Lee, M.-S.; Hsu, W.; Huang, H.-Y.; Tseng, H.-Y.; Lee, C.-T.; Hsu, C.-Y.; Shieh, Y.-C.; Wang, S.-H.; Yao, D.-J.; Liu, C.-H. Simultaneous Detection of Two Growth Factors from Human Single-Embryo Culture Medium by a Bead-Based Digital Microfluidic Chip. Biosens. Bioelectron. 2020, 150, 111851. [Google Scholar] [CrossRef]
- Gu, Z.; Wu, M.-L.; Yan, B.-Y.; Wang, H.-F.; Kong, C. Integrated Digital Microfluidic Platform for Colorimetric Sensing of Nitrite. ACS Omega 2020, 5, 11196–11201. [Google Scholar] [CrossRef]
- Berthier, J.; Dubois, P.; Clementz, P.; Claustre, P.; Peponnet, C.; Fouillet, Y. Actuation Potentials and Capillary Forces in Electrowetting Based Microsystems. Sens. Actuators A Phys. 2007, 134, 471–479. [Google Scholar] [CrossRef]
- Jain, V.; Devarasetty, V.; Patrikar, R. Effect of Electrode Geometry on Droplet Velocity in Open EWOD Based Device for Digital Microfluidics Applications. J. Electrost. 2017, 87, 11–18. [Google Scholar] [CrossRef]
- Guan, Y.; Tong, A.Y.; Nikapitiya, N.Y.J.B.; Moon, H. Numerical Modeling of Microscale Droplet Dispensing in Parallel-Plate Electrowetting-on-Dielectric (EWOD) Devices with Various Reservoir Designs. Microfluid. Nanofluid 2016, 20, 39. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.-R.; Zeng, J.; Zhou, J.-L.; Yan, B.-Y.; Gu, Z.; Wang, H.-F. Optimization of Electrode Patterns for an ITO-Based Digital Microfluidic through the Finite Element Simulation. Micromachines 2022, 13, 1563. https://doi.org/10.3390/mi13101563
Song Z-R, Zeng J, Zhou J-L, Yan B-Y, Gu Z, Wang H-F. Optimization of Electrode Patterns for an ITO-Based Digital Microfluidic through the Finite Element Simulation. Micromachines. 2022; 13(10):1563. https://doi.org/10.3390/mi13101563
Chicago/Turabian StyleSong, Ze-Rui, Jin Zeng, Jia-Le Zhou, Bing-Yong Yan, Zhen Gu, and Hui-Feng Wang. 2022. "Optimization of Electrode Patterns for an ITO-Based Digital Microfluidic through the Finite Element Simulation" Micromachines 13, no. 10: 1563. https://doi.org/10.3390/mi13101563
APA StyleSong, Z.-R., Zeng, J., Zhou, J.-L., Yan, B.-Y., Gu, Z., & Wang, H.-F. (2022). Optimization of Electrode Patterns for an ITO-Based Digital Microfluidic through the Finite Element Simulation. Micromachines, 13(10), 1563. https://doi.org/10.3390/mi13101563