
Design and Optimization of the Resonator in a Resonant Accelerometer Based on Mode and Frequency Analysis


Abstract
1. Introduction
2. Theory of the Resonator
2.1. Working Mechanism
2.2. Vibrational Mode and Frequency
3. Design of the Resonator
4. Optimization of the Resonator
4.1. Boundary Conditions
4.2. Structural Parameters
5. Experiments and Discussion
6. Conclusions
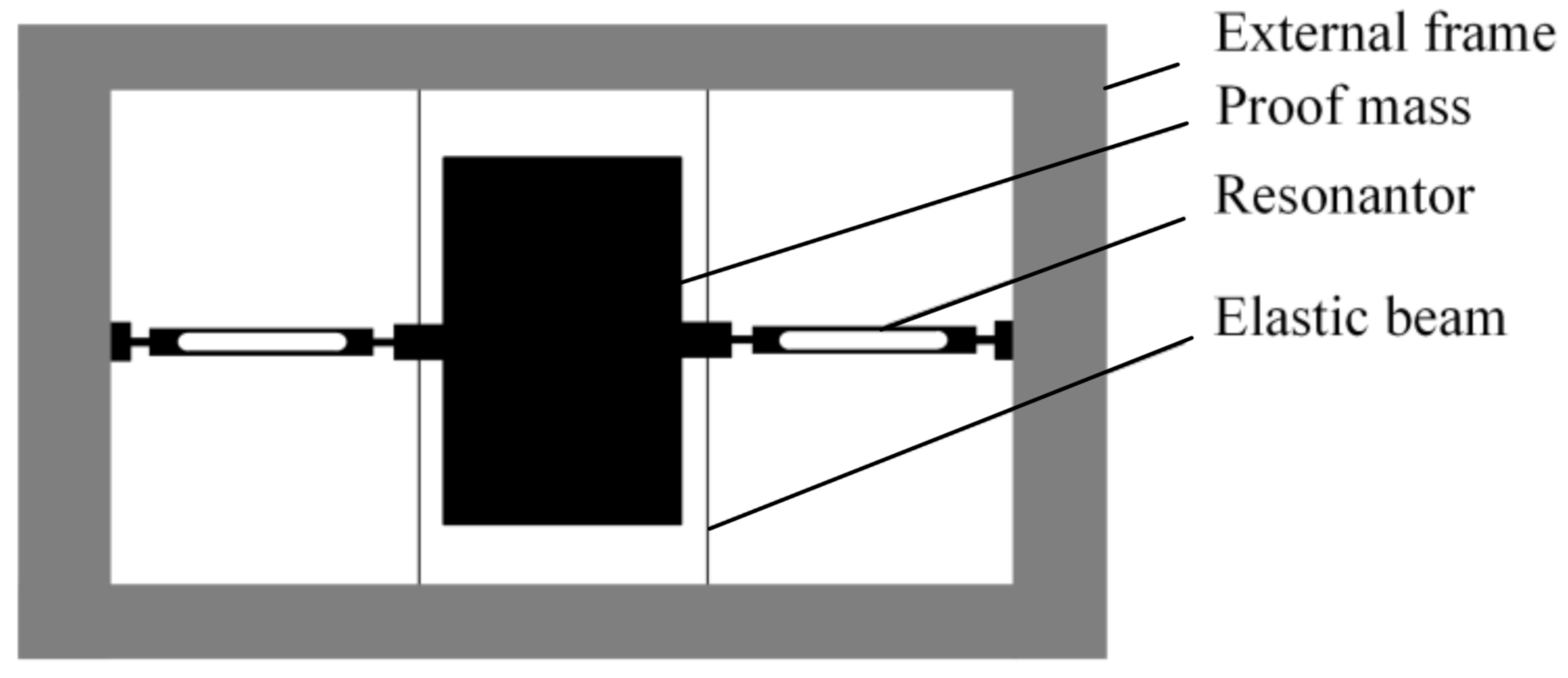
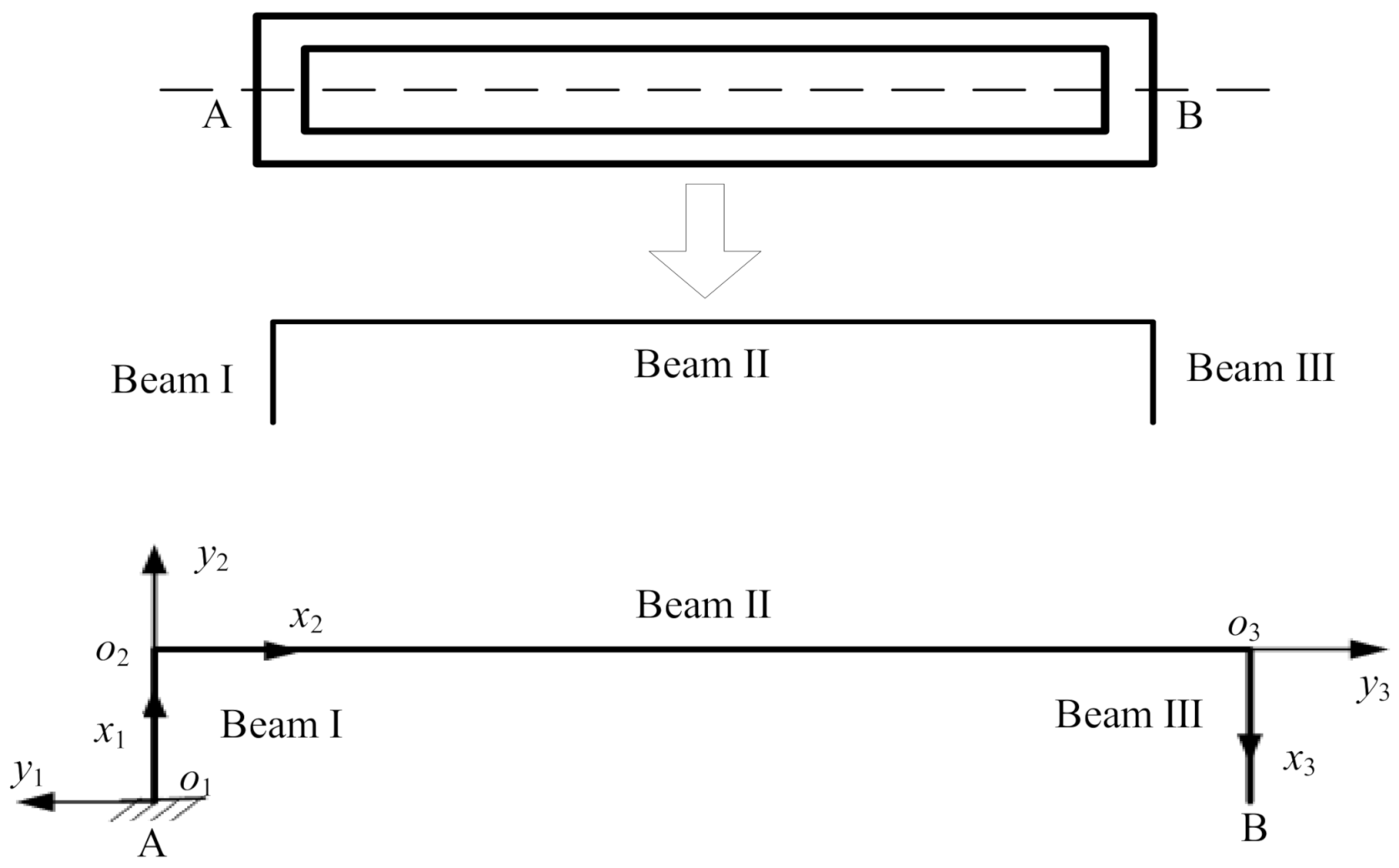
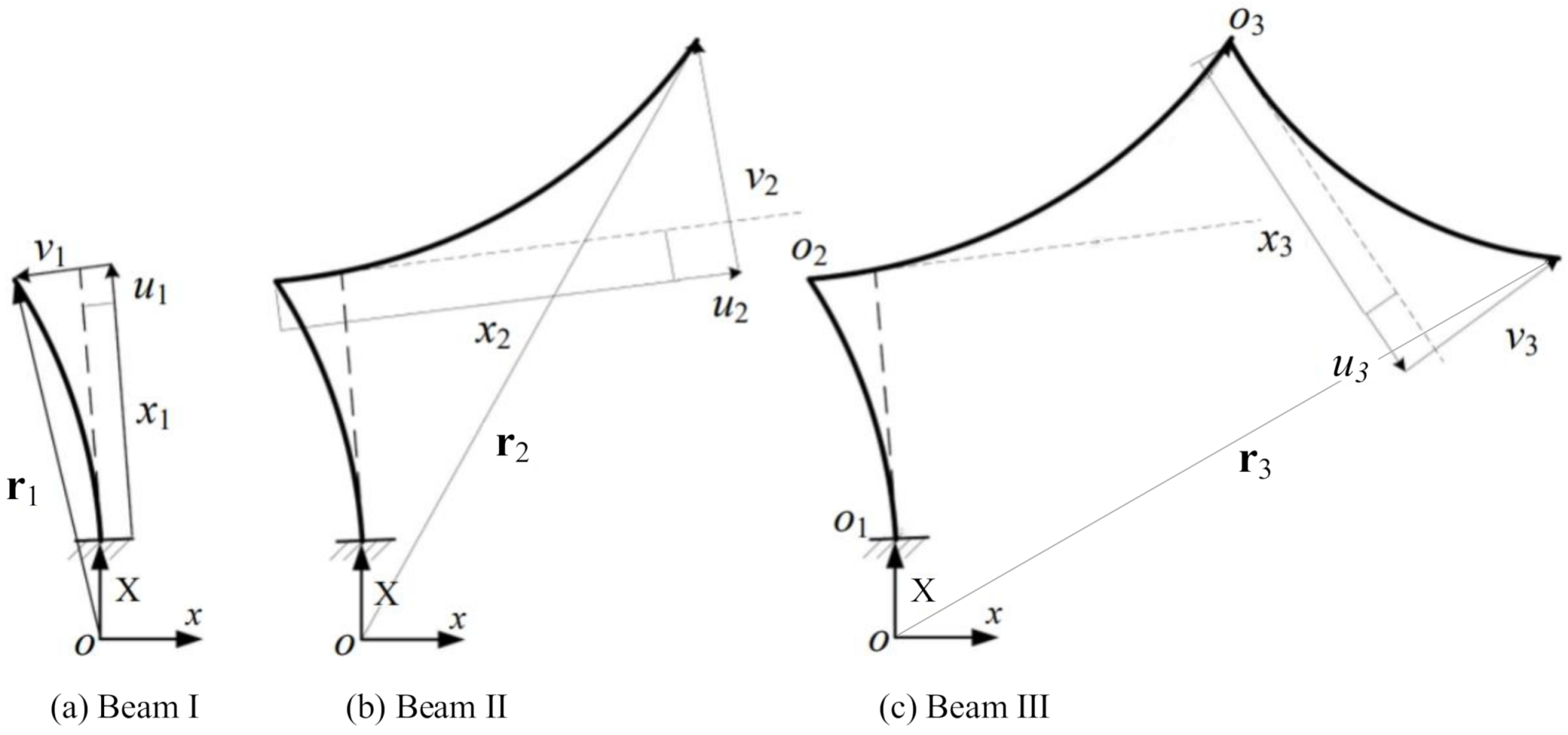
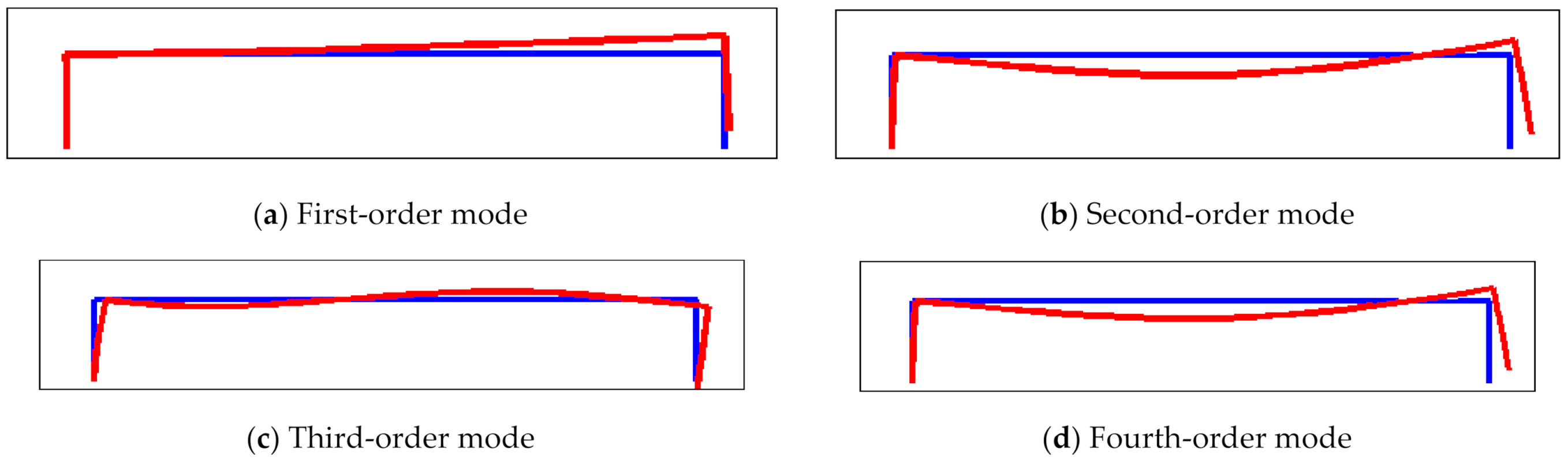
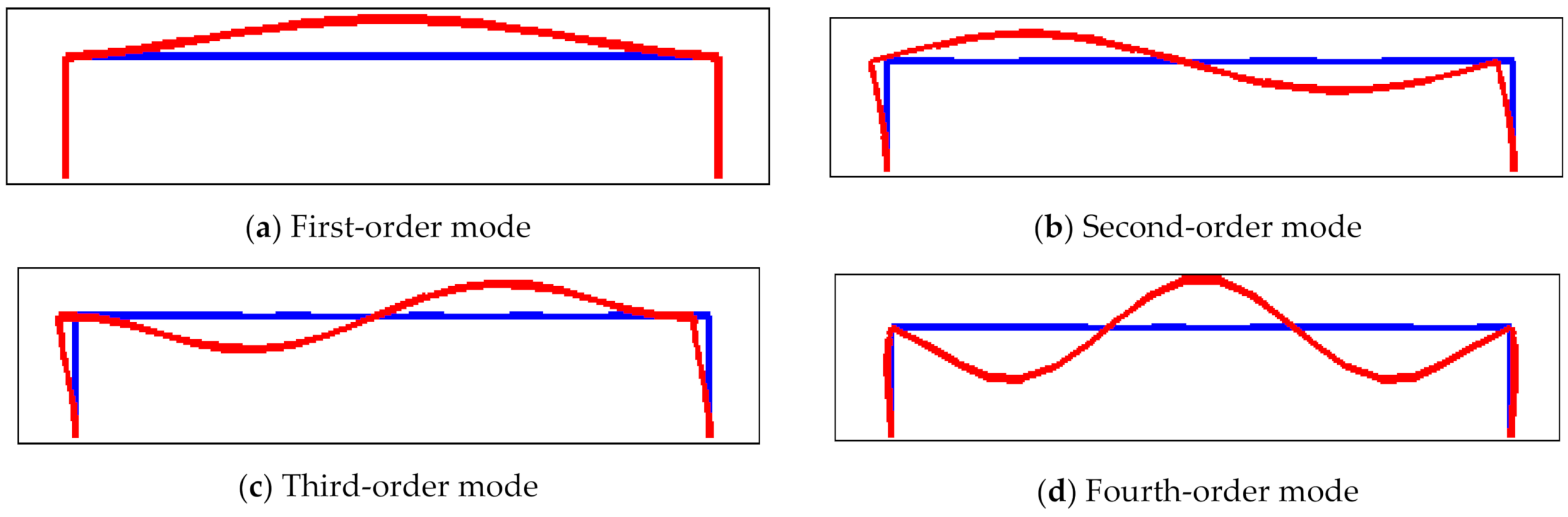
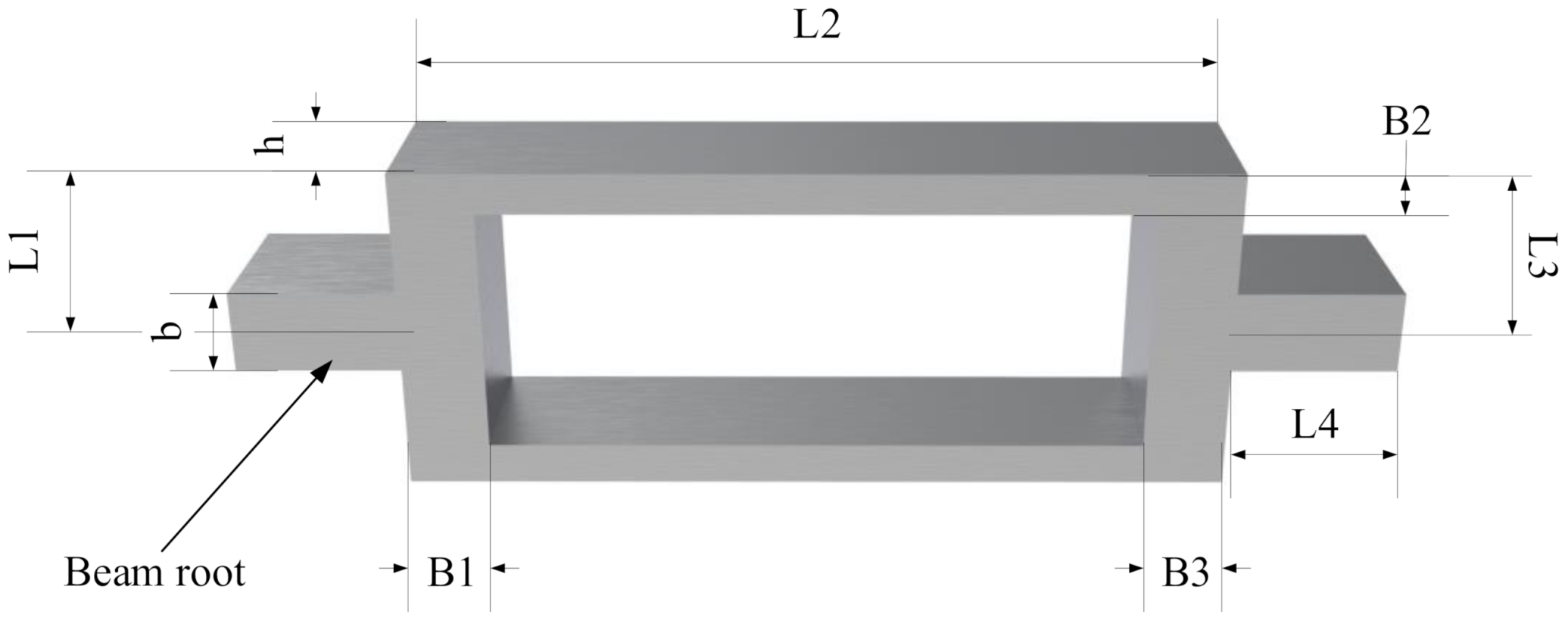
- According to the working principle of a resonant accelerometer, the resonator was divided into beam I, beam II, and beam III. The shape and displacement of the resonator was described in detail. Using Hamilton’s principle, the undamped dynamic control equation and the corresponding boundary conditions of the resonant beam were obtained. Furthermore, the ordinary differential dynamic equation of the resonant beam with n degrees of freedom was obtained to verify the correctness of the theoretical analysis.
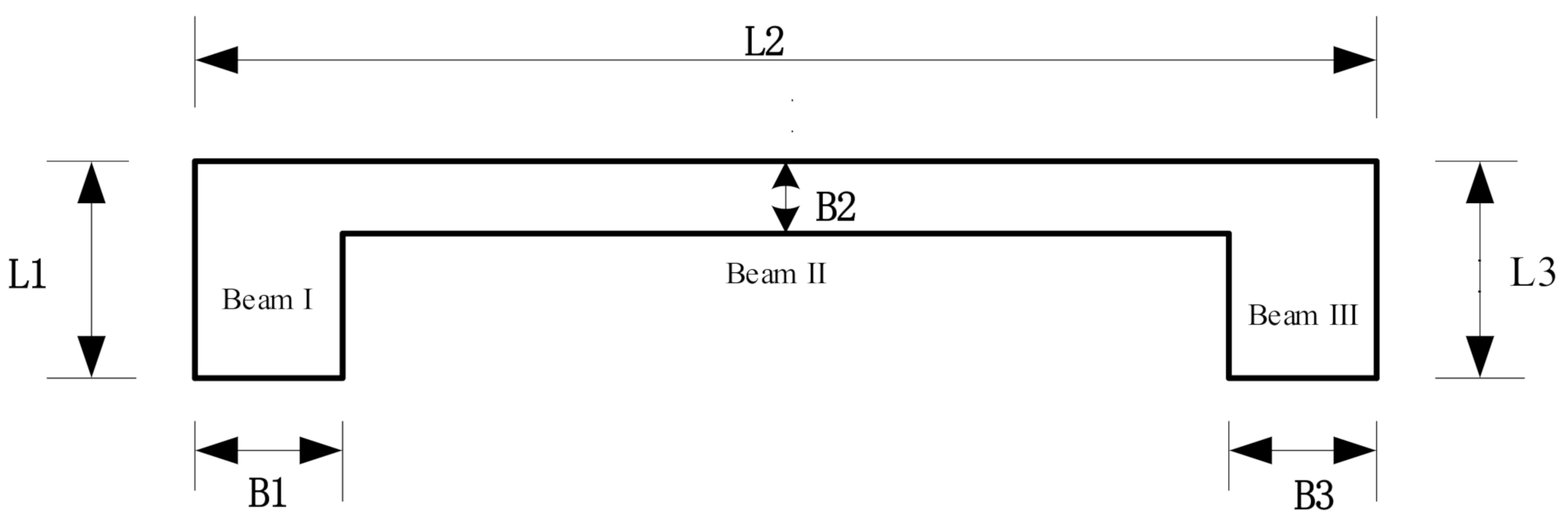
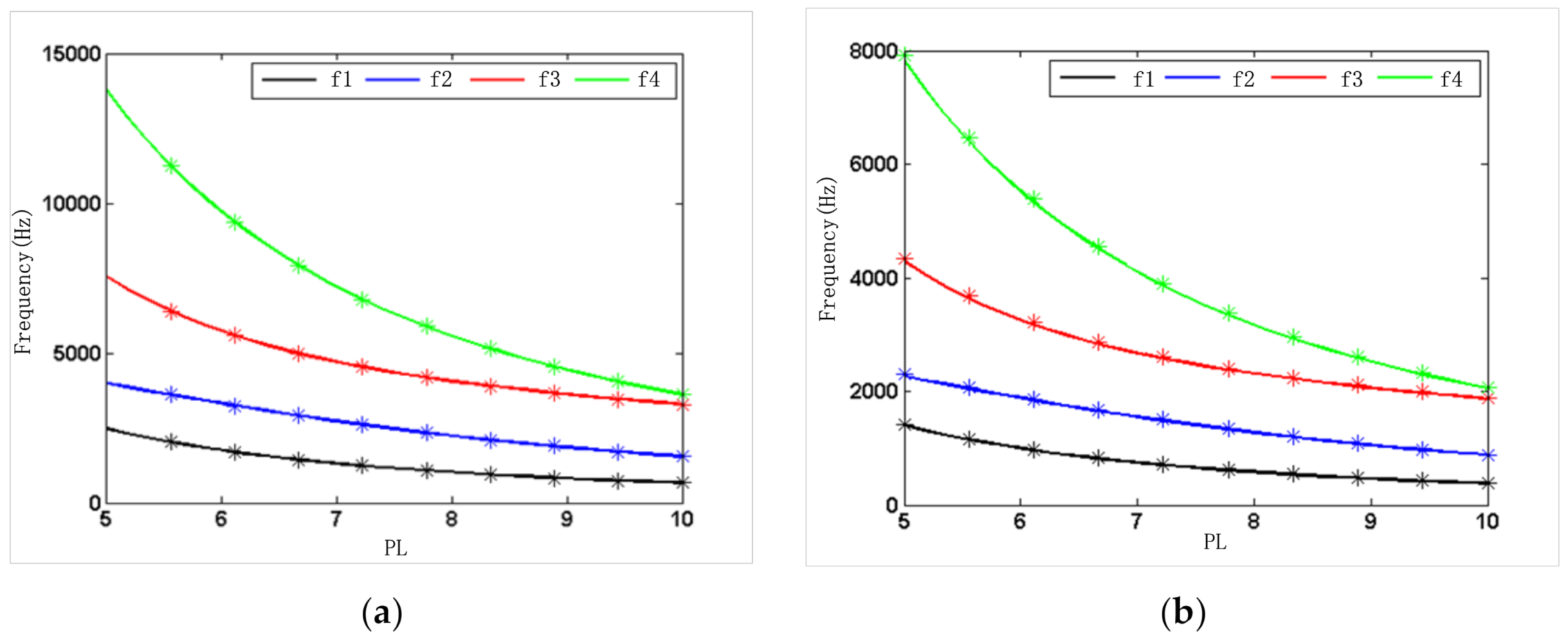
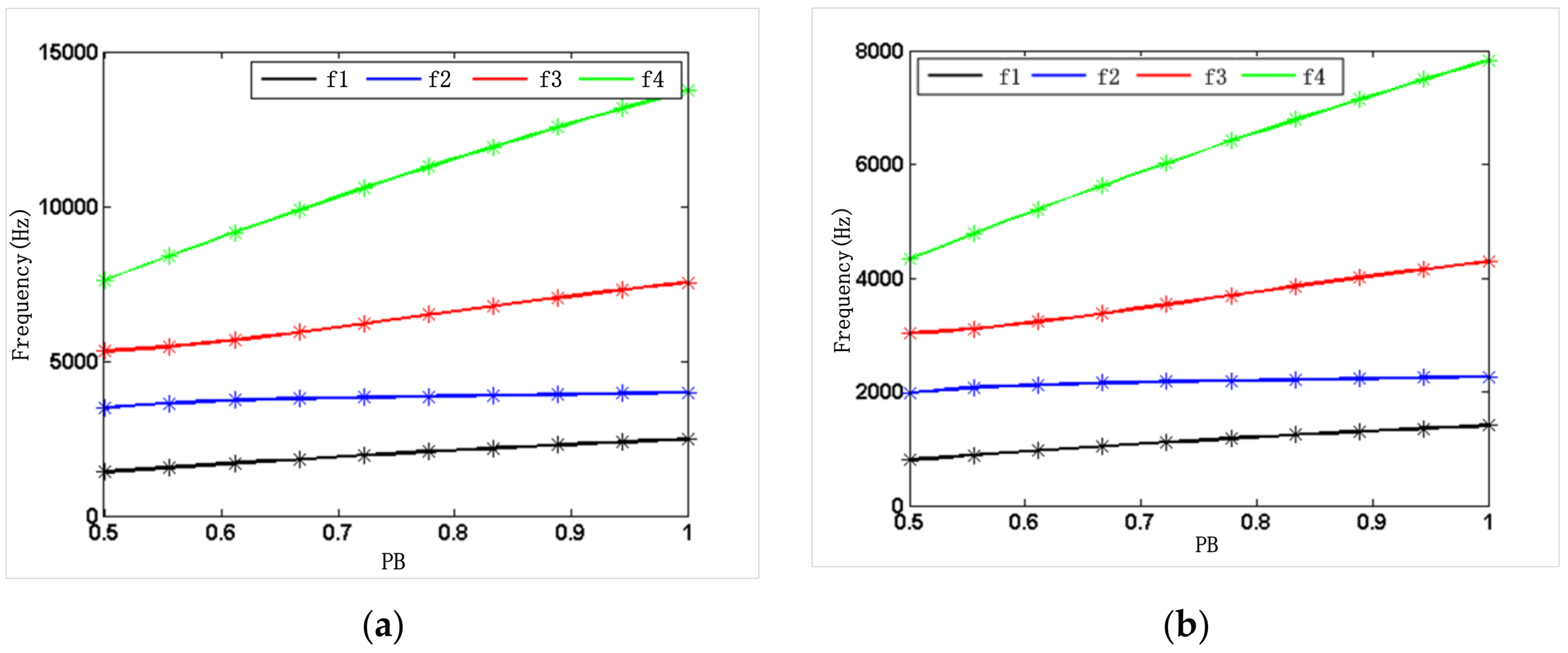
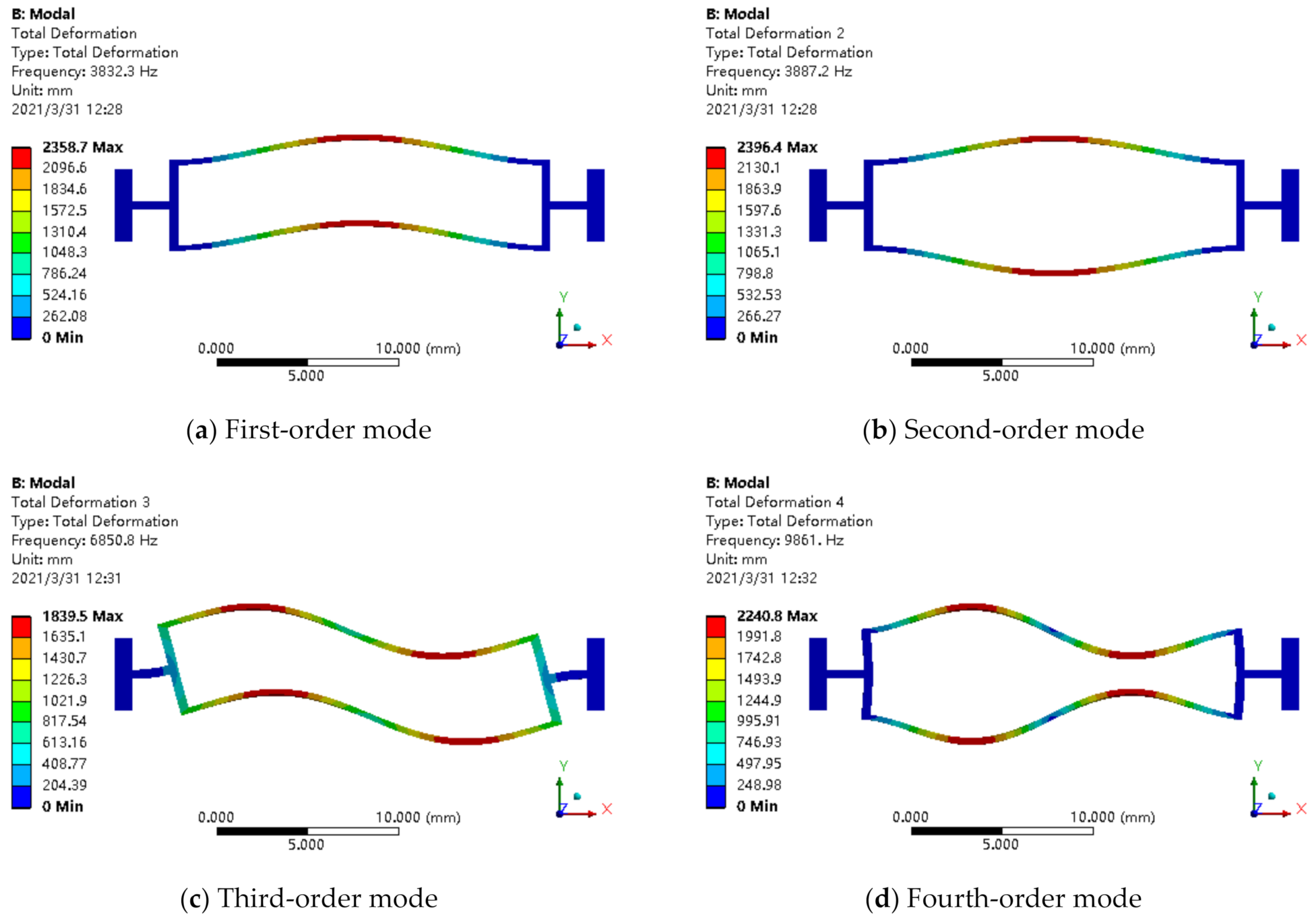
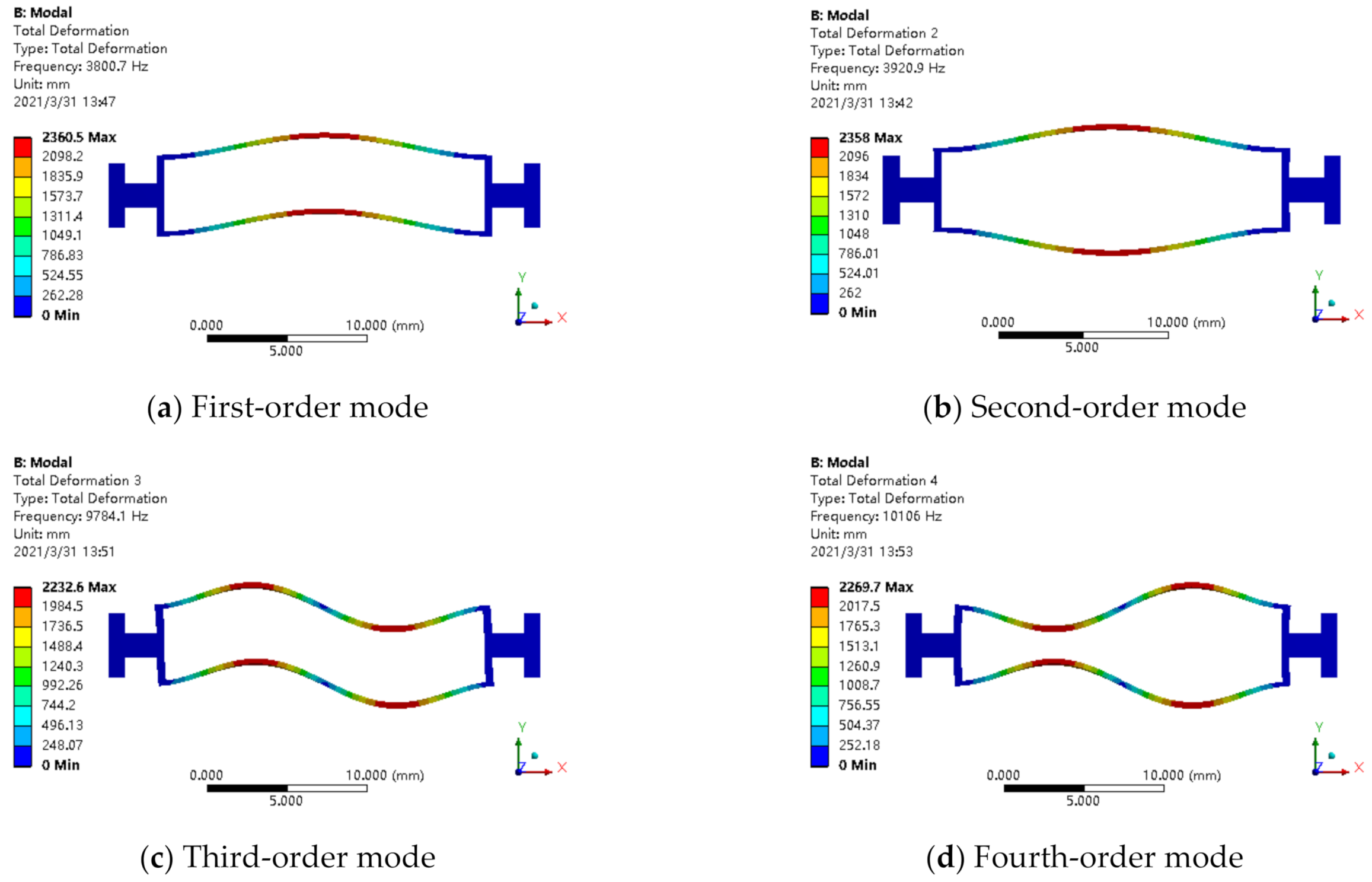
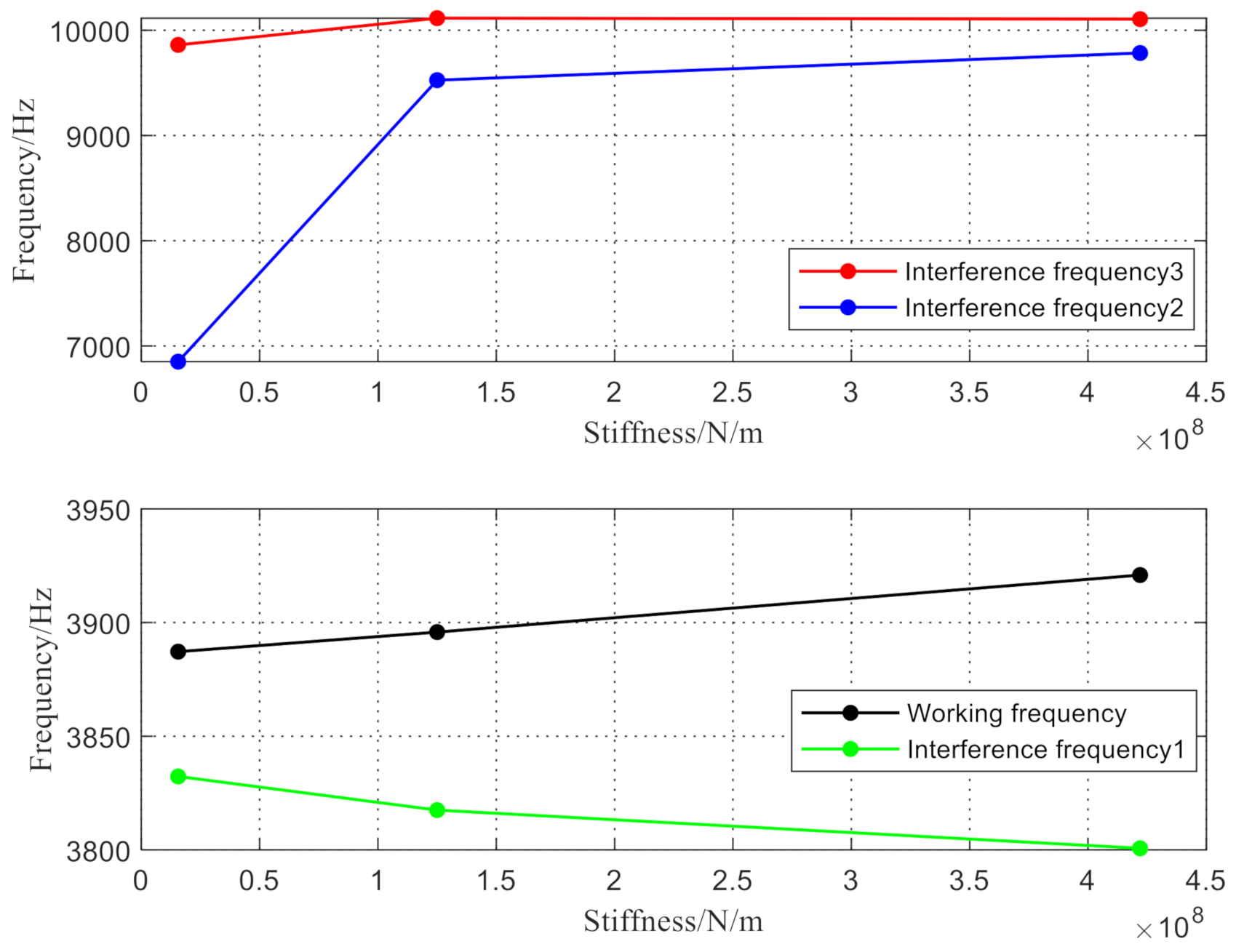
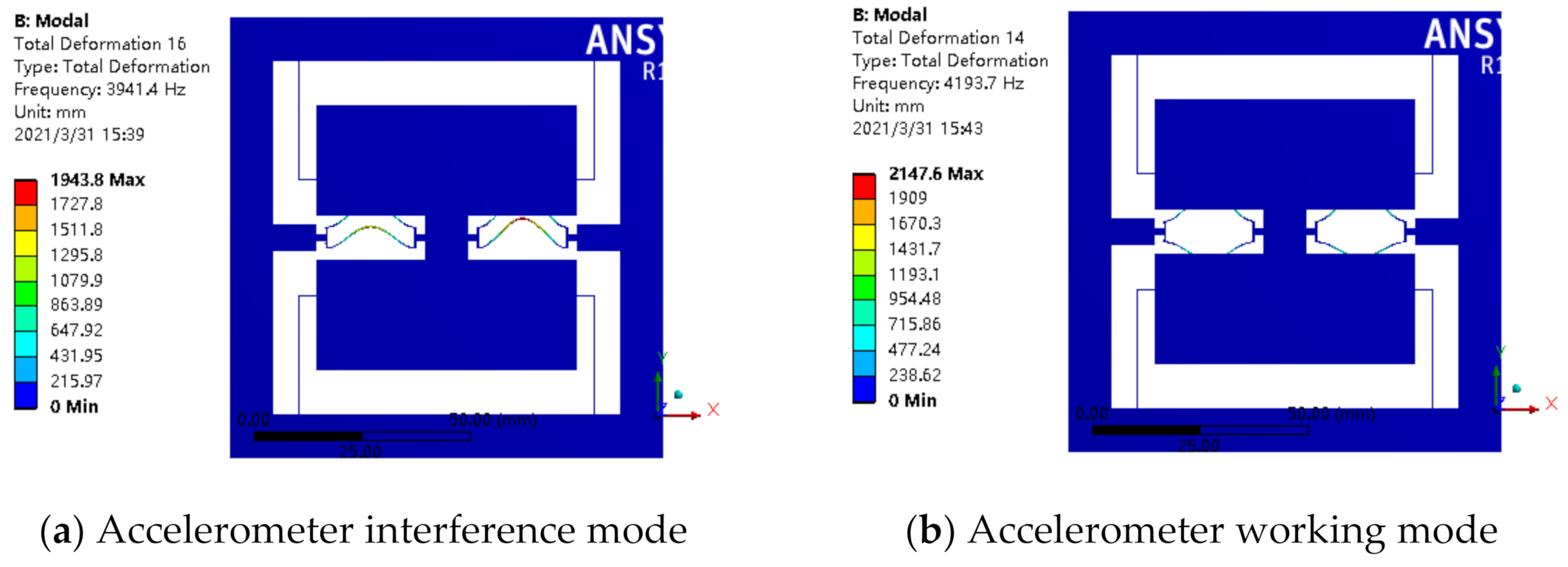
- The structural parameters of the accelerometer were designed and optimized by using resonator mode and frequency analysis; then, they were verified by using a finite element simulation. As the simulation results demonstrated, the working mode of the resonant accelerometer is far away from the interference mode and avoids resonance points effectively.
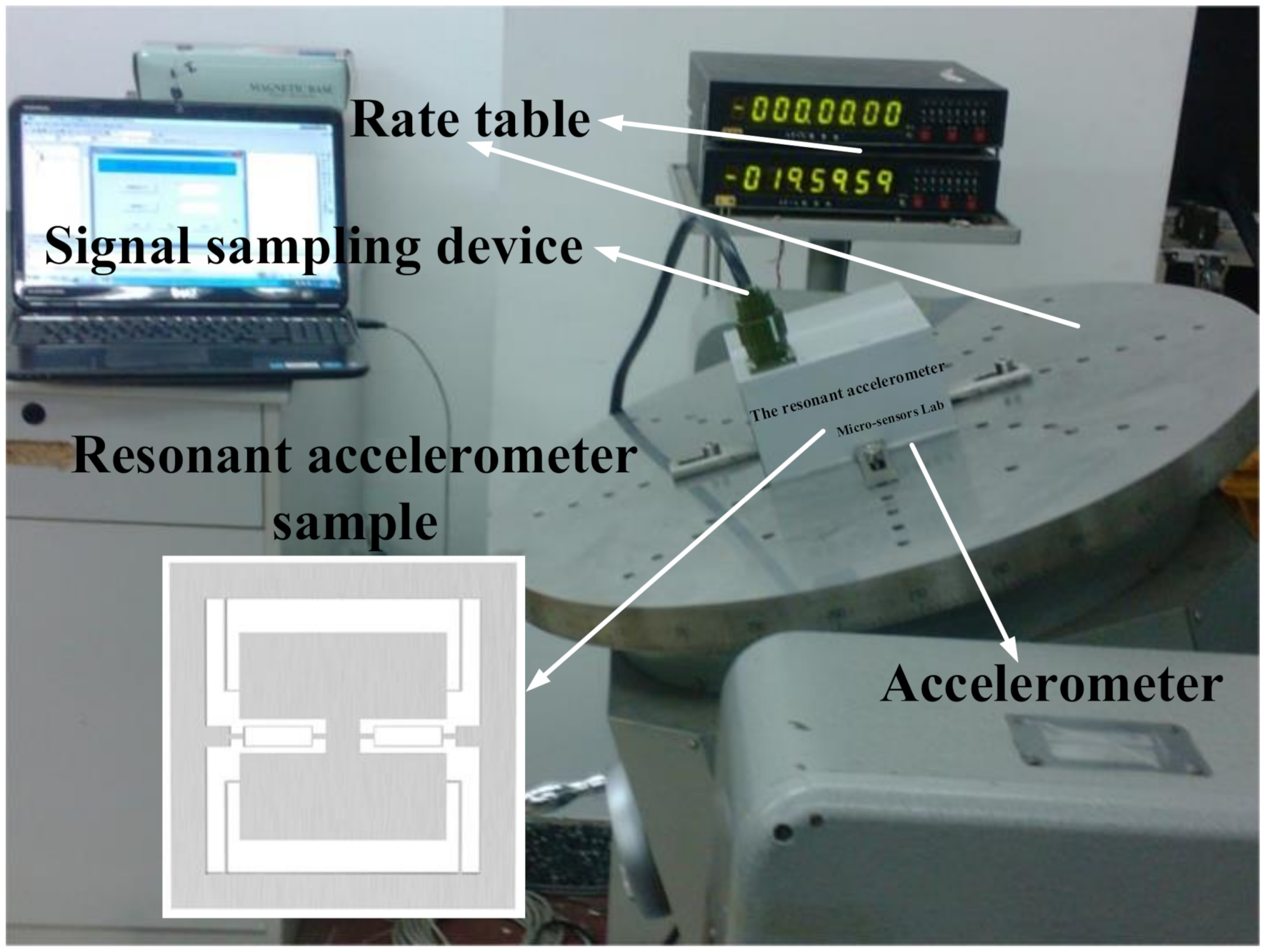
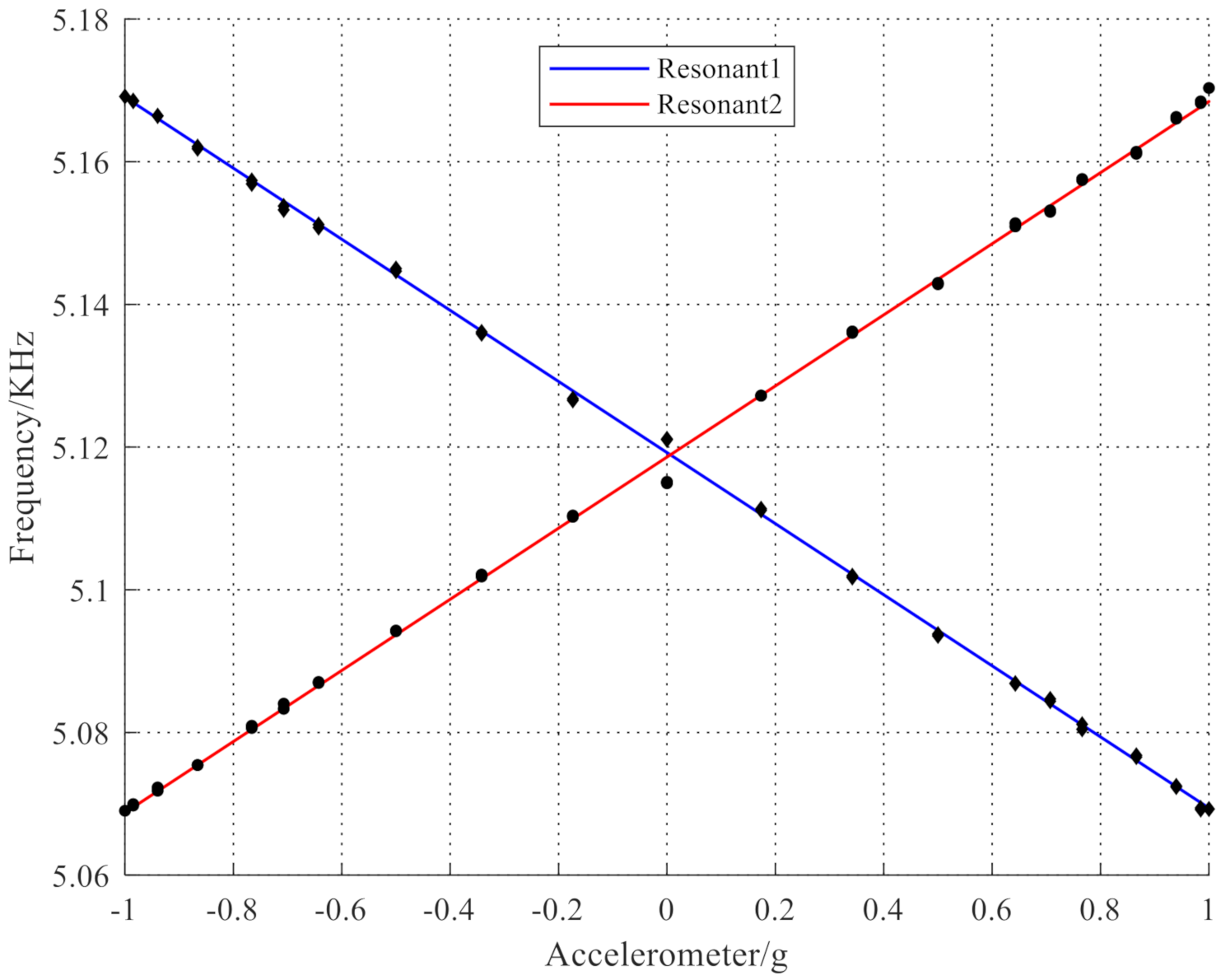
- From the 1 g acceleration tumbling experiments results of the resonant accelerometer sample, the sensitivity is 98 Hz/g, the resolution is 0.917 mg, and the bias stability is 1.323 mg/h. This shows that the proposed design and optimization method of the resonant accelerometer based on resonator mode and frequency analysis is effective and feasible.
- This research provides an important and novel method for the design and optimization of a resonant accelerometer, which may inspire the use of resonant accelerometers for a variety of motion sensing applications ranging from inertial navigation to vibration monitoring. We will consider a new acceleration sensitive mechanism to achieve an ultra-sensitive accelerometer in the future.
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, J.; Su, Y.; Shi, Q.; Qiu, A.P. Microelectromechanical resonant accelerometer designed with a high sensitivity. Sensors 2015, 15, 30293–30310. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Wang, X.; Dai, B.; Liu, X. A new z-axis resonant micro-accelerometer based on electrostatic stiffness. Sensors 2015, 15, 687–702. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Zhao, Y.; Li, C.; Cheng, R.; Sun, D.; Wang, S. A differential resonant accelerometer with low cross-interference and temperature drift. Sensors 2017, 17, 178. [Google Scholar] [CrossRef] [PubMed]
- Mustafazade, A.; Pandit, M.; Zhao, C.; Sobreviela, G.; Du, Z.; Steinmann, P.; Seshia, A.A. A vibrating beam MEMS accelerometer for gravity and seismic measurements. Sci. Rep. 2020, 10, 10415. [Google Scholar] [CrossRef]
- Han, C.; Li, C.; Zhao, Y.; Li, B. High-Stability Quartz Resonant Accelerometer with Micro-Leverages. J. Microelectromech. Syst. 2021, 30, 184–192. [Google Scholar] [CrossRef]
- Han, G.; Fu, X.; Xu, L. Free vibration for a micro resonant pressure sensor with cross-type resonator. Adv. Mech. Eng. 2021, 13, 1687814020987336. [Google Scholar] [CrossRef]
- Jiang, B.; Huang, S.; Zhang, J.; Su, Y. Analysis of Frequency Drift of Silicon MEMS Resonator with Temperature. Micromachines 2021, 12, 26. [Google Scholar] [CrossRef]
- Carr, A.R.; Patel, Y.H.; Neff, C.R.; Charkhabi, S.; Kallmyer, N.E.; Angus, H.F.; Reuel, N.F. Sweat monitoring beneath garments using passive, wireless resonant sensors interfaced with laser-ablated microfluidics. Npj Digit. Med. 2020, 3, 62. [Google Scholar] [CrossRef]
- Kochhar, A.; Galanko, M.E.; Soliman, M.; Abdelsalam, H.; Colombo, L.; Lin, Y.C.; Fedder, G.K. Resonant microelectromechanical receiver. J. Microelectromech. Syst. 2019, 28, 327–343. [Google Scholar] [CrossRef]
- Liang, W.; Ilchenko, V.S.; Savchenkov, A.A.; Dale, E.; Eliyahu, D.; Matsko, A.B.; Maleki, L. Resonant microphotonic gyroscope. Optica 2017, 4, 114–117. [Google Scholar] [CrossRef]
- Xu, L.; Wang, S.; Jiang, Z.; Wei, X. Programmable synchronization enhanced MEMS resonant accelerometer. Microsyst. Nanoeng. 2020, 6, 63. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuator A Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- OlssonIII, R.H.; Wojciechowski, K.E.; Baker, M.S.; Tuck, M.R.; Fleming, J.G. Post-CMOS-compatible aluminum nitride resonant MEMS accelerometers. J. Microelectromech. Syst. 2009, 18, 671–678. [Google Scholar] [CrossRef]
- Azgin, K.; Valdevit, L. The effects of tine coupling and geometrical imperfections on the response of DETF resonators. J. Micromech. Microeng. 2013, 23, 125011. [Google Scholar] [CrossRef]
- Yang, Y.D.; Huang, Y.Z. Mode analysis and Q-factor enhancement due to mode coupling in rectangular resonators. IEEE J. Quantum Electron. 2007, 43, 497–502. [Google Scholar] [CrossRef]
- Phani, A.S.; Seshia, A.A.; Palaniapan, M.; Howe, R.T.; Yasaitis, J. Modal coupling in micromechanical vibratory rate gyroscopes. IEEE Sens. J. 2006, 6, 1144–1152. [Google Scholar] [CrossRef]
- Guo, W.H.; Huang, Y.Z.; Lu, Q.Y.; Yu, L.J. Modes in square resonators. IEEE J. Quantum Electron. 2003, 39, 1563–1566. [Google Scholar]
- Lu, K.; Li, Q.; Zhou, X.; Song, G.; Wu, K.; Zhuo, M.; Xiao, D. Modal Coupling Effect in a Novel Nonlinear Micromechanical Resonator. Micromachines 2020, 11, 472. [Google Scholar] [CrossRef] [PubMed]
- Hassanpour, P.A.; Cleghorn, W.L.; Esmailzadeh, E.; Mills, J.K. Vibration analysis of micro-machined beam-type resonators. J. Sound Vibr. 2007, 308, 287–301. [Google Scholar] [CrossRef]
- Du, J.; Wei, X.; Ren, J.; Wang, J.; Huan, R. Micromechanical vibration absorber for frequency stability improvement of DETF oscillator. J. Micromech. Microeng. 2019, 29, 045005. [Google Scholar] [CrossRef]
- Huang, B.S.; Chang-Chien, W.T.; Hsieh, F.H.; Chou, Y.F.; Chang, C.O. Analysis of the natural frequency of a quartz double-end tuning fork with a new deformation model. J. Micromech. Microeng. 2016, 26, 065006. [Google Scholar] [CrossRef]
- Guzman, P.; Dinh, T.; Phan, H.P.; Joy, A.P.; Qamar, A.; Bahreyni, B.; Dao, D.V. Highly-doped SiC resonator with ultra-large tuning frequency range by Joule heating effect. Mater. Des. 2020, 194, 108922. [Google Scholar] [CrossRef]
- Shi, H.; Fan, S.; Zhang, Y. Design and optimization of slit-resonant beam in a MEMS pressure sensor based on uncertainty analysis. Microsyst. Technol. 2017, 23, 5545–5559. [Google Scholar] [CrossRef]
- Zotov, S.A.; Simon, B.R.; Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Quality factor maximization through dynamic balancing of tuning fork resonator. IEEE Sens. J. 2014, 14, 2706–2714. [Google Scholar] [CrossRef]
- Candler, R.N.; Duwel, A.; Varghese, M.; Chandorkar, S.A.; Hopcroft, M.A.; Park, W.T.; Kenny, T.W. Impact of geometry on thermoelastic dissipation in micromechanical resonant beams. J. Microelectromech. Syst. 2006, 15, 927–934. [Google Scholar] [CrossRef]
- Zhou, X.; Xiao, D.; Hou, Z.; Li, Q.; Wu, Y.; Wu, X. Influences of the structure parameters on sensitivity and Brownian noise of the disk resonator gyroscope. J. Microelectromech. Syst. 2017, 26, 519–527. [Google Scholar] [CrossRef]
- Shi, H.; Fan, S.; Li, W. Design and optimization of DETF resonator based on uncertainty analysis in a micro-accelerometer. Microsyst. Technol. 2018, 24, 2025–2034. [Google Scholar] [CrossRef]
- Xu, Y.; Zhao, L.; Jiang, Z.; Ding, J.; Peng, N.; Zhao, Y. A novel piezoresistive accelerometer with SPBs to improve the tradeoff between the sensitivity and the resonant frequency. Sensors 2016, 16, 210. [Google Scholar] [CrossRef]
- Du, X.; Wang, L.; Li, A.; Wang, L.; Sun, D. High accuracy resonant pressure sensor with balanced-mass DETF resonator and twinborn diaphragms. J. Microelectromech. Syst. 2016, 26, 235–245. [Google Scholar] [CrossRef]
- Zhao, C.; Wood, G.S.; Xie, J.; Chang, H.; Pu, S.H.; Kraft, M. A three degree-of-freedom weakly coupled resonator sensor with enhanced stiffness sensitivity. J. Microelectromech. Syst. 2015, 25, 38–51. [Google Scholar] [CrossRef]
- Yan, L.; Shangchun, F.; Zhanshe, G.; Jing, L.; Le, C. Study of dynamic characteristics of resonators for MEMS resonant vibratory gyroscopes. Microsyst. Technol. 2012, 18, 639–647. [Google Scholar] [CrossRef]
- Jing, L.; Shang-Chun, F.; Yan, L.; Zhan-She, G. Dynamic stability of parametrically-excited linear resonant beams under periodic axial force. Chin. Phys. B 2012, 21, 110401. [Google Scholar]
- Wang, H.; Li, Y. Dynamic analysis of the resonator for resonant accelerometer. Sens. Rev. 2018, 38, 478–485. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density/(Kg/m3) | Young’s Modulus/(GPa) | Poisson Ratio | |
|---|---|---|---|
| Silicon | 2300 | 170 | 0.278 |
| Steel | 7800 | 211 | 0.3 |
| Parameters | Resonant Beam | Beam Root 1 | Beam Root 2 | Beam Root 3 |
|---|---|---|---|---|
| Length (mm) | 20 | 2 | 2 | 2 |
| Width (mm) | 0.3 | 0.5 | 1 | 1.5 |
| Thickness (mm) Stiffness (N/m) | 5 3375 | 5 1.56 × 107 | 5 1.25 × 108 | 5 4.22 × 108 |
| Parameters | Value | Unit |
|---|---|---|
| Density | 7.8 × 103 | kg/m3 |
| Young’s modulus | 2 × 1011 | Pa |
| External frame (length × width × thickness) | 100 × 100 × 5 | mm3 |
| Poisson ratio | 0.3 | / |
| Inner frame (length × width × thickness) | 80 × 80 × 5 | mm3 |
| Proof mass (length × width × thickness) | 60 × 50 × 5 | mm3 |
| Resonant beam (length × width × thickness) | 20 × 0.3 × 5 | mm3 |
| Beam root (length × width × thickness) | 2 × 1.5 × 5 | mm3 |
| Axial force | 1.2 | N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Jin, B.; Zhao, M.; Yang, F. Design and Optimization of the Resonator in a Resonant Accelerometer Based on Mode and Frequency Analysis. Micromachines 2021, 12, 530. https://doi.org/10.3390/mi12050530
Li Y, Jin B, Zhao M, Yang F. Design and Optimization of the Resonator in a Resonant Accelerometer Based on Mode and Frequency Analysis. Micromachines. 2021; 12(5):530. https://doi.org/10.3390/mi12050530
Chicago/Turabian StyleLi, Yan, Biao Jin, Mengyu Zhao, and Fuling Yang. 2021. "Design and Optimization of the Resonator in a Resonant Accelerometer Based on Mode and Frequency Analysis" Micromachines 12, no. 5: 530. https://doi.org/10.3390/mi12050530
APA StyleLi, Y., Jin, B., Zhao, M., & Yang, F. (2021). Design and Optimization of the Resonator in a Resonant Accelerometer Based on Mode and Frequency Analysis. Micromachines, 12(5), 530. https://doi.org/10.3390/mi12050530