
Analog Spatial Light Modulators Based on Micromirror Arrays


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Types and Applications
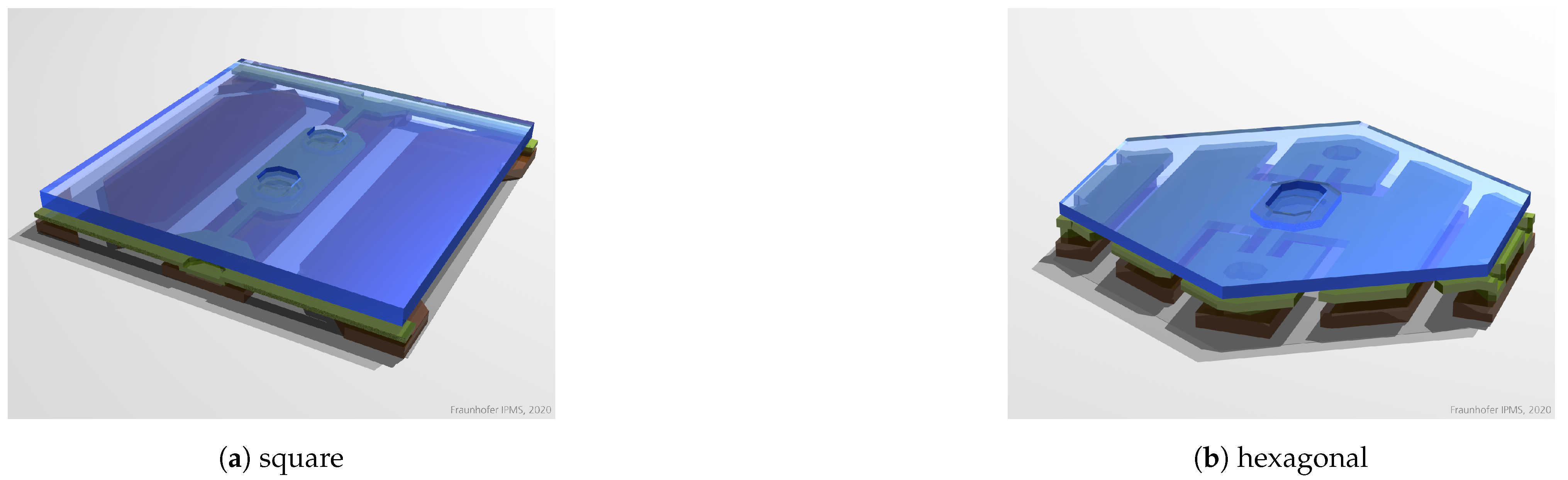
2.1. One-Axis Tilting Mirrors
- 1
- The electrodes (bottom layer, brown):
- (a)
- The mirror electrode (center): provides a common voltage for all mirrors, used mainly as a bias (set to a negative voltage) to increase the electrostatic force between the mirror and the address electrode.
- (b)
- The counter electrode (right): used to compensate for positive pre-deflections, identical for all mirrors.
- (c)
- address electrode (left): provides the individual address voltages.
- 2
- The “hinge” layer (second layer, green): This contains the torsional springs that provide the force to counterbalance the electrostatic force. The springs are connected electrically, as well as mechanically to the mirror electrode by posts. In addition, in the example shown in Figure 1a, there are bars perpendicular to the springs at the upper and lower edge that prevent the mirror from touching either the counter or address electrode and thus causing short cuts. In the example shown in Figure 1b, the same purpose is served by landing electrodes that run between the mirrors.
- 3
- The mirror (top layer, blue).
2.2. Two-Axis Tilting Mirrors
2.3. Piston Mirrors
2.4. Mirror Addressing Circuit (Backplane)
3. Improving Mechanical, Thermal, and Optical Properties Based on Simulations
4. Fabrication
4.1. CMOS Fabrication
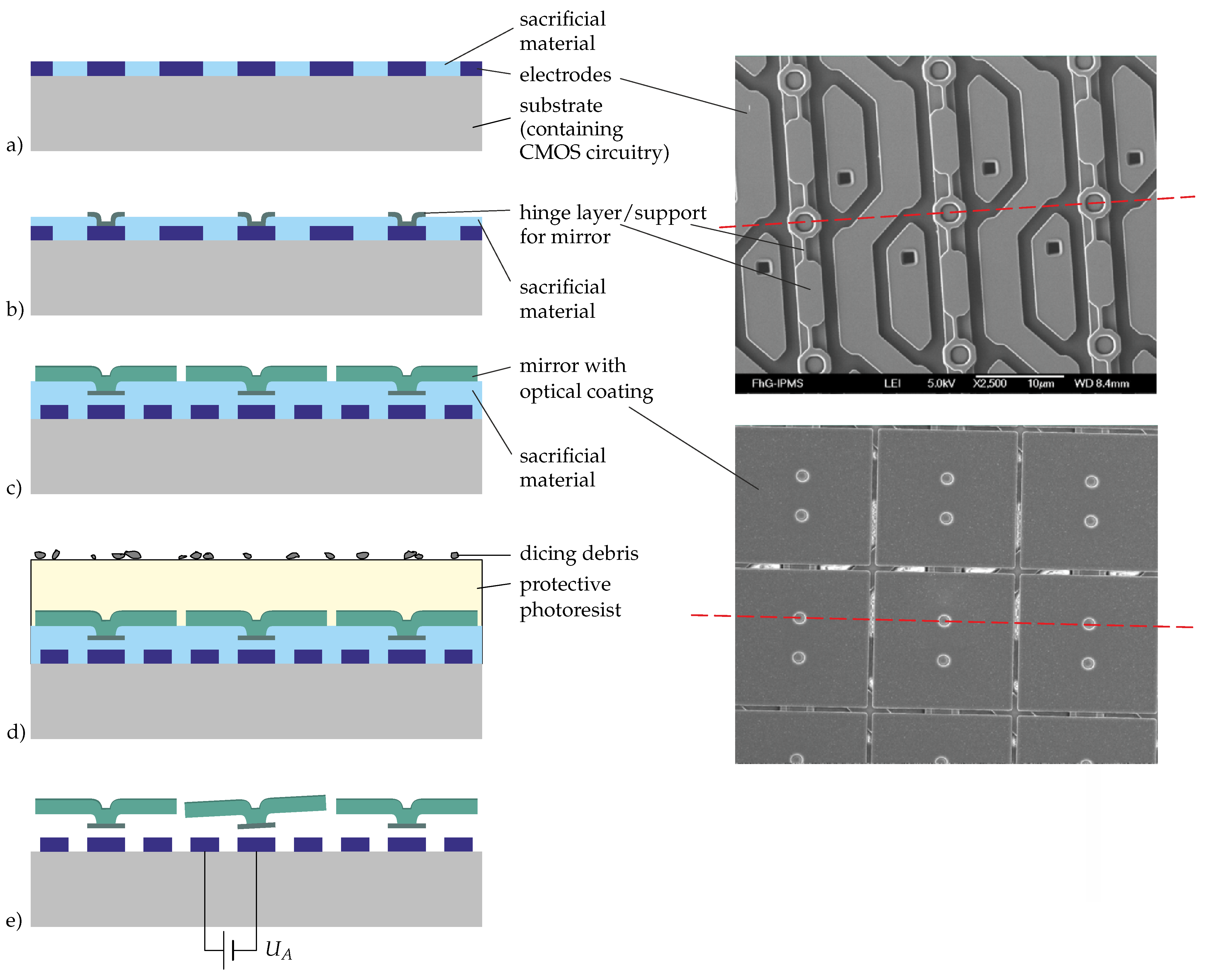
4.2. Mirror Fabrication
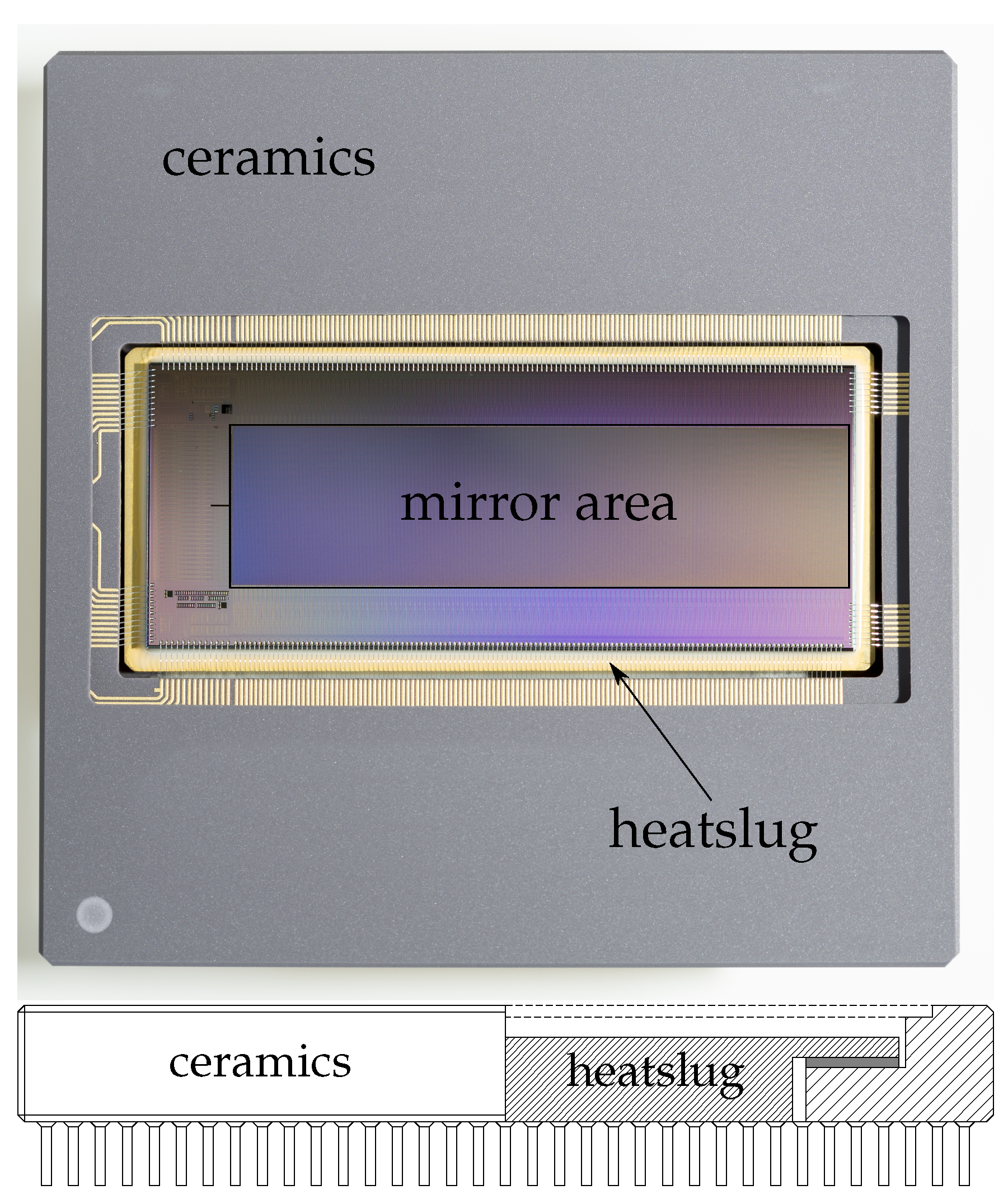
4.3. Die Bonding
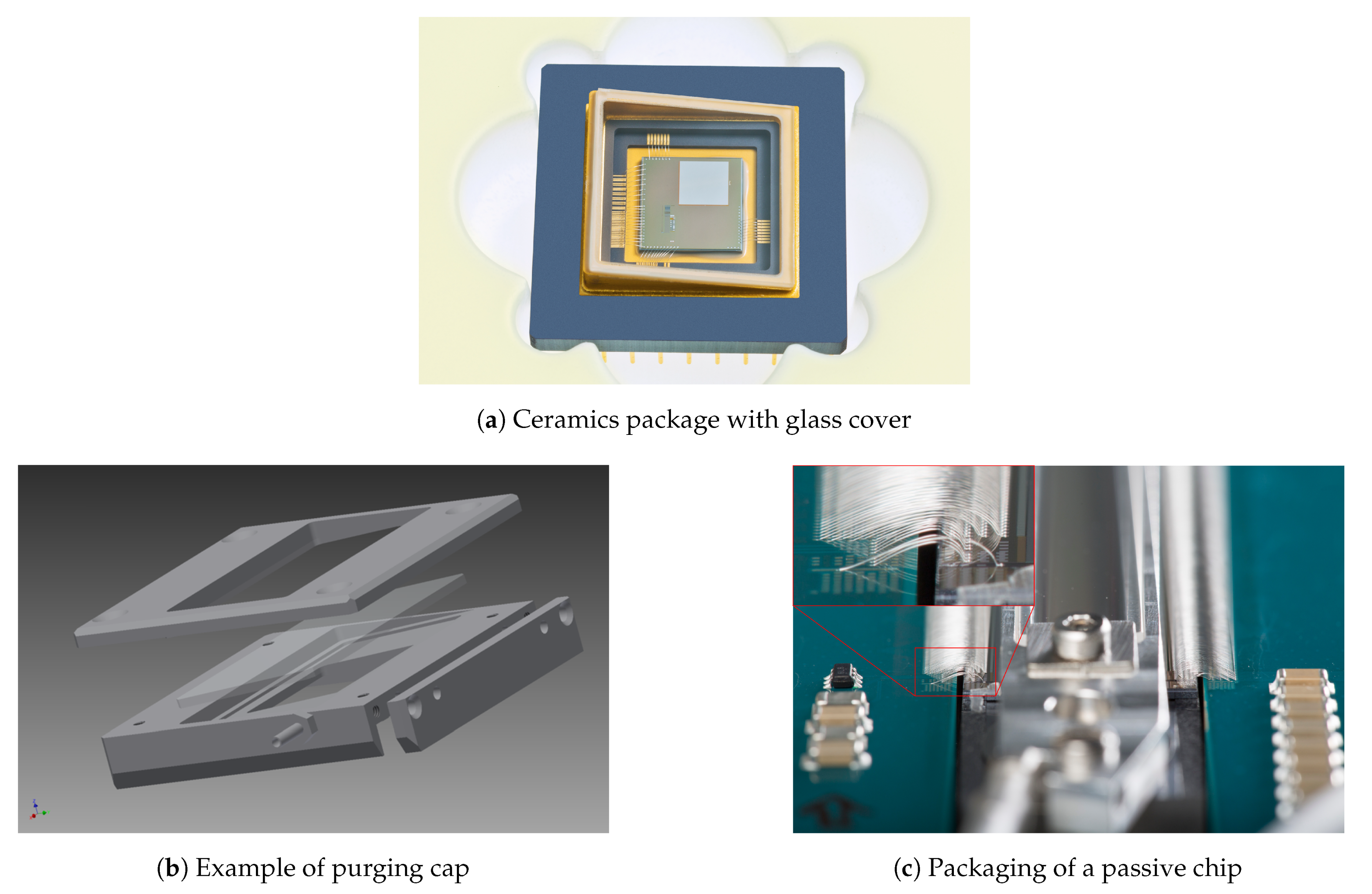
4.4. Sealing the SLM
- direct mechanical damage
- particles
- humidity
- corrosive substances
- oxygen
5. Characterization
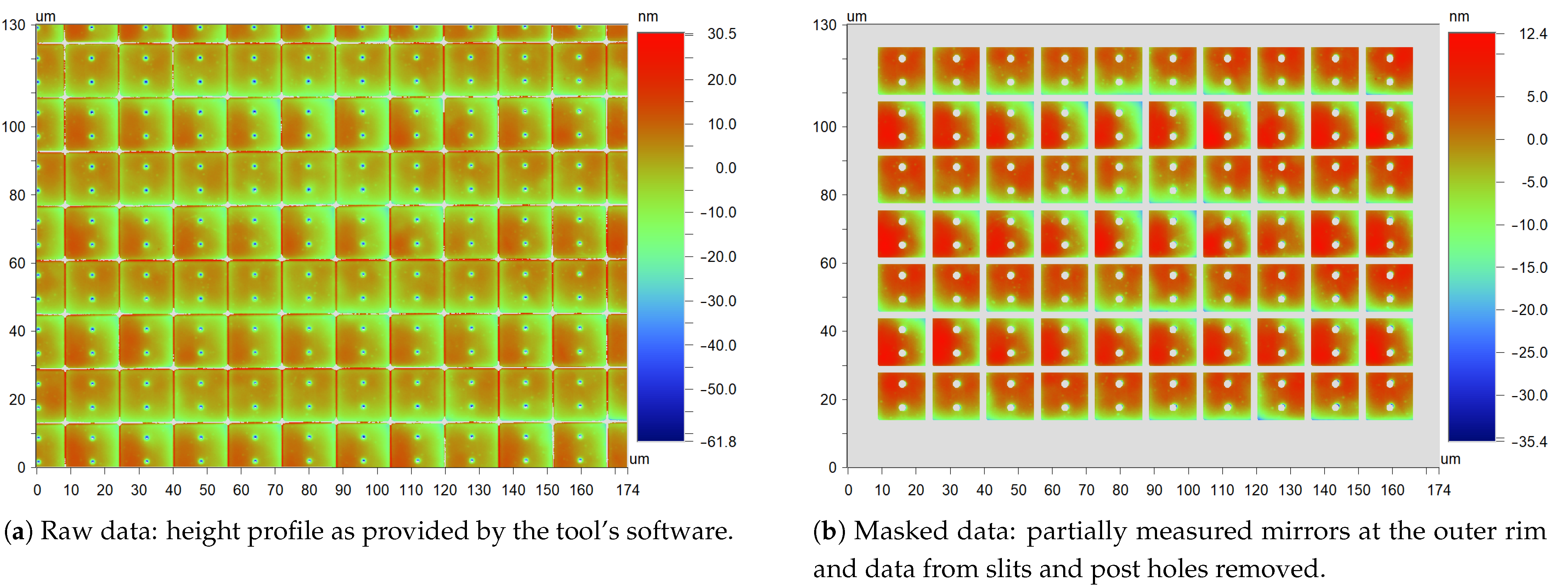
5.1. Local Planarity
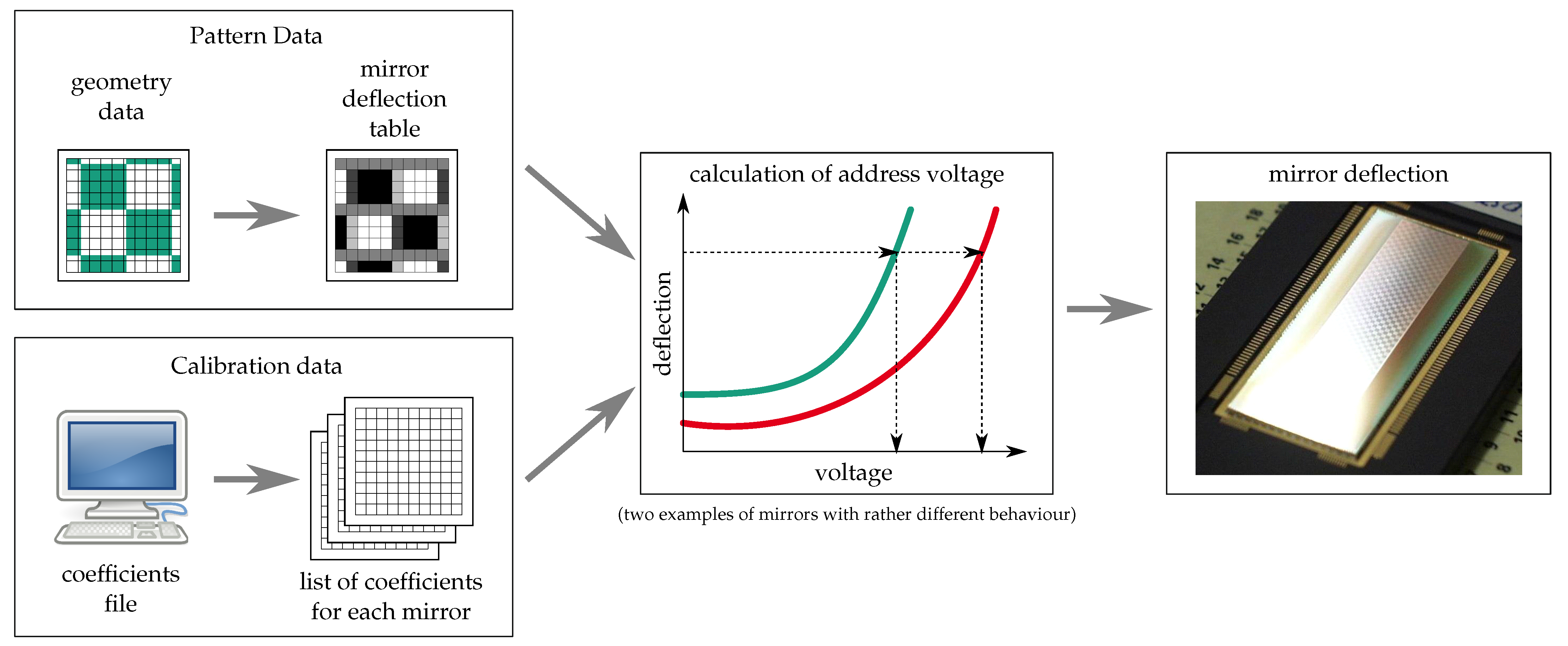
5.2. Mirror Calibration for a Precise Analog Deflection Control
5.3. In Situ Planarity Measurements
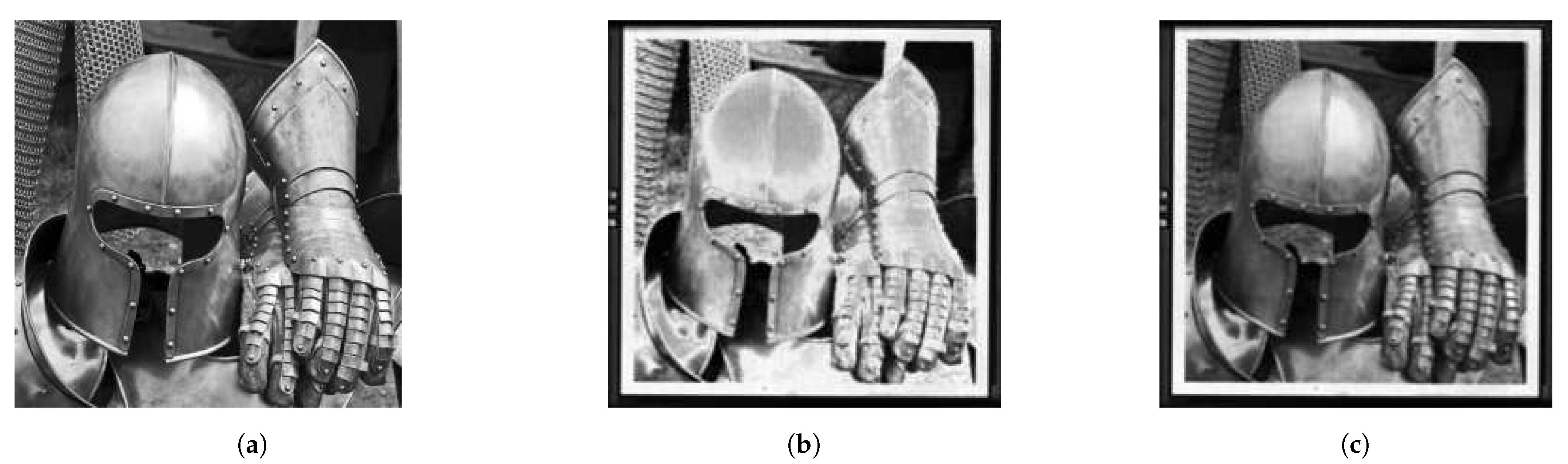
5.4. Contrast Measurements
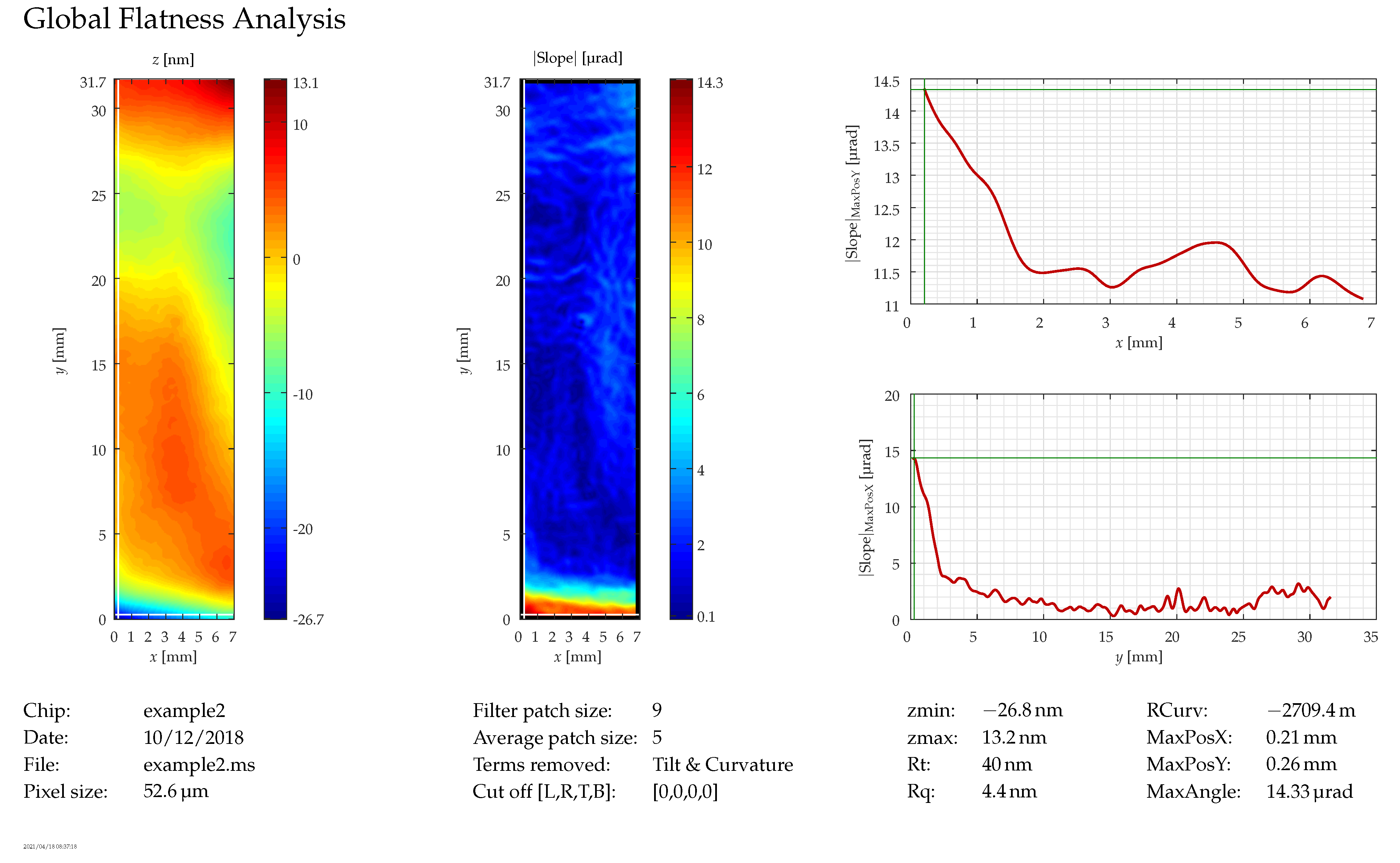
5.5. Global Planarity
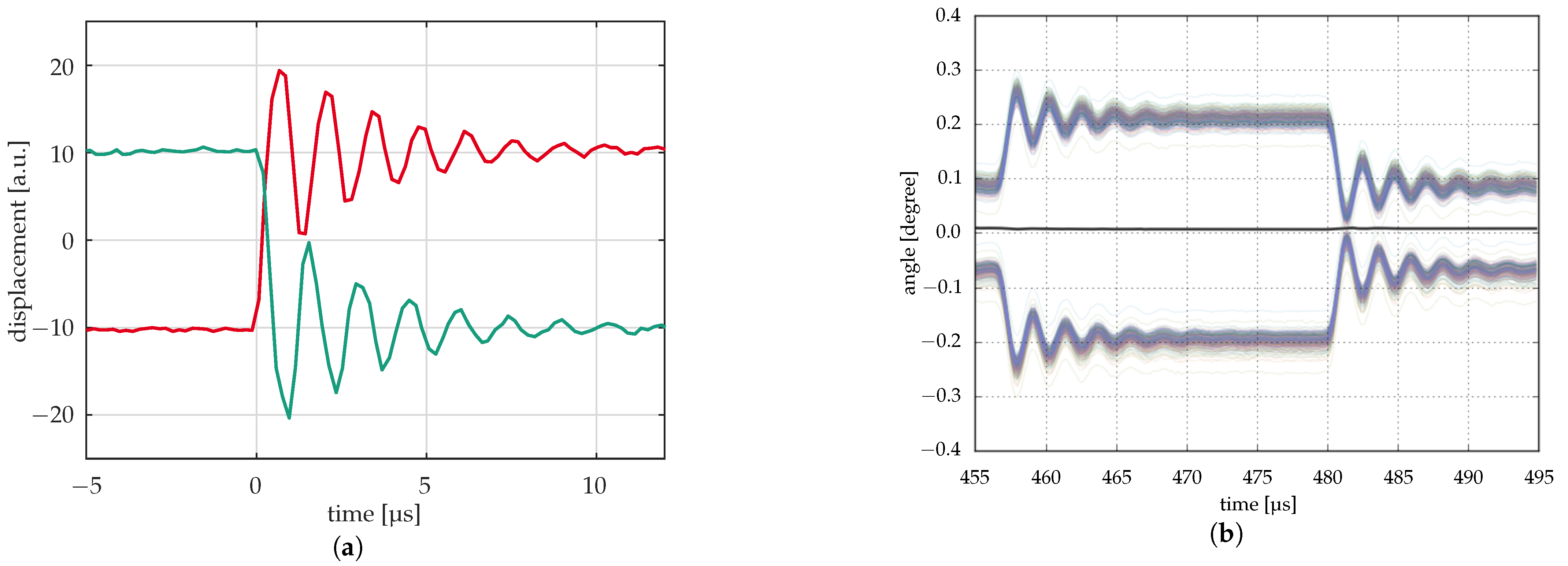
5.6. Measurement of Dynamic Properties
6. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hornbeck, L.J. Digital Light Processing update: Status and future applications. In Proceedings of the Projection Displays V, San Jose, CA, USA, 23–29 January 1999; Volume 3634, pp. 158–170. [Google Scholar] [CrossRef]
- Schadt, M.; Helfrich, W. Voltage—Dependent optical activity of a twisted nematic liquid crystal. Appl. Phys. Lett. 1971, 18, 127–128. [Google Scholar] [CrossRef]
- Gong, Y.; Zhang, S. Ultrafast 3-D shape measurement with an off-the-shelf DLP projector. Opt. Express 2010, 18, 19743. [Google Scholar] [CrossRef] [PubMed]
- Bleha, W.P.; Lei, L.A. Advances in Liquid Crystal on Silicon (LCOS) spatial light modulator technology. In Proceedings of the Display Technologies and Applications for Defense, Security, and Avionics VII, Baltimore, Maryland, USA, 29 April–3 May 2013; Desjardins, D.D., Sarma, K.R., Eds.; Volume 8736. [Google Scholar] [CrossRef]
- Song, Y.; Panas, R.M.; Hopkins, J.B. A review of micromirror arrays. Precis. Eng. 2018, 51, 729–761. [Google Scholar] [CrossRef]
- Boston Micromachines Corporation. Standard Deformable Mirrors. Available online: https://bostonmicromachines.com/standard-deformable-mirrors/ (accessed on 30 March 2021).
- Boston Micromachines Corporation. Hex Class Deformable Mirrors. Available online: https://bostonmicromachines.com/hex-mirrors/ (accessed on 30 March 2021).
- Trisnadi, J.I.; Carlisle, C.B.; Monteverde, R. Overview and applications of Grating-Light-Valve-based optical write engines for high-speed digital imaging. In Proceedings of the MOEMS Display and Imaging Systems II, San Jose, CA, USA, 24–29 January 2004; Voume 5348, pp. 52–64. [Google Scholar] [CrossRef]
- Silicon Light Machines. Introduction to PLV Technology. Available online: http://www.siliconlight.com/wp-content/themes/siliconlight/pdf/PLVTechnology.pdf (accessed on 30 March 2021).
- Witvrouw, A.; Haspeslagh, L.; Varela Pedreira, O.; Coster, J.D.; Wolf, I.D.; Tilmans, H.A.C.; Bearda, T.; Schlatmann, B.; Bommel, M.V.; Nooijer, M.C.D.; et al. 11-Megapixel CMOS-Integrated SiGe Micromirror Arrays for High-End Applications. J. Microelectromech. Syst. 2010, 19, 202–214. [Google Scholar] [CrossRef]
- Gerhard-Multhaupt, R. Light-valve technologies for high-definition television projection displays. Displays 1991, 12, 115–128. [Google Scholar] [CrossRef]
- Gehner, A. Entwicklung Hochauflösender Flächenlichtmodulatoren mit Deformierbaren Spiegelanordnungen für die Maskenlose Mikrolithographie. Ph.D. Thesis, Universität Duisburg-Essen, Duisburg, Germany, 1997. [Google Scholar]
- Kück, H.; Doleschal, W.; Gehner, A.; Grundke, W.; Melcher, R.; Paufler, J.; Seltmann, R.; Zimmer, G. Deformable micromirror devices as phase modulation high resolution light valves. In Proceedings of the 8th International Conference on Solid-State Sensors and Actuators 1995 and Eurosensors IX. Digest of Technical Papers. Volume 1. Sessions A1-PD6. Papers No. 1-231, Stockholm, Sweden, 25–29 June 1995; pp. 301–304. [Google Scholar]
- Kück, H.; Bollerott, M.; Doleschal, W.; Gehner, A.; Grundke, W.; Kunze, D.; Melcher, R.; Paufler, J.; Seltmann, R.; Zimmer, G. New system for fast submicron laser direct writing. In Proceedings of the Optical/Laser Microlithography VIII, Santa Clara, CA, USA, 19–24 February 1995; Volume 2440, pp. 506–514. [Google Scholar] [CrossRef]
- Dauderstädt, U.A.; Askebjer, P.; Björnängen, P.; Dürr, P.; Friedrichs, M.; List, M.; Rudloff, D.; Schmidt, J.U.; Müller, M.; Wagner, M. Advances in SLM development for microlithography. In Proceedings of the MOEMS and Miniaturized Systems VIII, San Jose, CA, USA, 24–29 January 2009; Volume 7208. [Google Scholar] [CrossRef]
- Ljungblad, U.B.; Dauderstädt, U.A.; Dürr, P.; Sandström, T.; Buhre, H.; Lakner, H.K. New laser pattern generator for DUV using a spatial light modulator. Microelectron. Eng. 2001, 57–58, 23–29. [Google Scholar] [CrossRef]
- Heber, J.; Rückerl, F.; Berndt, D.; Schmidt, J.; Bellow, S.; Tinevez, J.Y.; Knobbe, J.; Shorte, S.; Wagner, M. Spatio-angular illumination control using diffractive micromirror arrays. In Proceedings of the 10th International Conference on Optics-Photonics Design and Fabrication, ODF 2016, CD-ROM, Hochschule Ravensburg-Weingarten, Weingarten, Germany, 28 February–2 March 2016. [Google Scholar]
- Roth, M.; Heber, J.; Janschek, K. System design of programmable 4f phase modulation techniques for rapid intensity shaping: A conceptual comparison. In Proceedings of the Laser-Based Micro- and Nanoprocessing X, San Francisco, CA, USA, 13–18 February 2016; Volume 9736. [Google Scholar] [CrossRef]
- Schmidt, J.U.; Dauderstädt, U.A.; Dürr, P.; Friedrichs, M.; Hughes, T.; Ludewig, T.; Rudloff, D.; Schwaten, T.; Trenkler, D.; Wagner, M.; et al. High-speed one-dimensional spatial light modulator for Laser Direct Imaging and other patterning applications. In Proceedings of the MOEMS and Miniaturized Systems XIII, San Francisco, CA, USA, 1–6 February 2014; Volume 8977. [Google Scholar] [CrossRef]
- Gehner, A.; Döring, S.; Rudloff, D.; Kunze, D.; Dürr, P.; Francés, S.; Hänsel, L.; Torlee, H.; Elgner, A.; Eckert, M.; et al. Novel CMOS-integrated 512x320 tip-tilt micro mirror array and related technology platform. In Proceedings of the MOEMS and Miniaturized Systems XIX, San Francisco, CA, USA, 1–6 February 2020; Piyawattanametha, W., Park, Y.H., Zappe, H., Eds.; International Society for Optics and Photonics. SPIE: Bellingham, WA, USA, 2020; Volume 11293, pp. 1–10. [Google Scholar] [CrossRef]
- OKO Technologies. 37 (19)—Channel Micromachined Deformable Mirror System. Available online: http://www.okotech.com/images/pdfs/passport37chMMDM.pdf (accessed on 29 March 2021).
- Cornelissen, S.A. 4096-element continuous face-sheet MEMS deformable mirror for high-contrast imaging. J. Micro/Nanolithogr. MEMS MOEMS 2009, 8, 031308. [Google Scholar] [CrossRef]
- Stewart, J.B.; Bifano, T.G.; Cornelissen, S.; Bierden, P.; Levine, B.M.; Cook, T. Design and development of a 331-segment tip–tilt–piston mirror array for space-based adaptive optics. Sens. Actuators A Phys. 2007, 138, 230–238. [Google Scholar] [CrossRef]
- Gehner, A.; Wildenhain, M.; Lakner, H.K. Micromirror arrays for wavefront correction. In Proceedings of the MOEMS and Miniaturized Systems, Santa Clara, CA, USA, 18–21 September 2000; Volume 4178, pp. 348–357. [Google Scholar] [CrossRef]
- Gehner, A.; Wildenhain, M.; Neumann, H.; Elgner, A.; Schenk, H. MEMS phase former kit for high-resolution wavefront control. In Proceedings of the Advanced Wavefront Control: Methods, Devices, and Applications III, San Diego, CA, USA, 31 July–4 August 2005; Volume 5894. [Google Scholar] [CrossRef]
- Kück, H.; Doleschal, W.; Gehner, A.; Grundke, W.; Melcher, R.; Paufler, J.; Seltmann, R.; Zimmer, G. Deformable micromirror devices as phase-modulating high-resolution light valves. Sens. Actuators A Phys. 1996, 54, 536–541. [Google Scholar] [CrossRef]
- Wagner, M.; Künzelmann, U.; Schenk, H.; Lakner, H.K. Global flatness of spatial light modulators. In Proceedings of the MOEMS Display, Imaging, and Miniaturized Microsystems IV, San Jose, CA, USA, 21–27 January 2006; Volume 6114. [Google Scholar] [CrossRef]
- Dürr, P.; Wolschke, S.; Ludewig, T.; Dauderstädt, U.A.; Kunze, D.; Wagner, M.; Lakner, H.K. Planarity Optimization of Spatial Light Modulators. In Proceedings of the 2nd European Conference Exhibition on Integration Issues of Miniaturized Systems—MOMS, MOEMS, ICS and Electronic Components, Barcelona, Spain, 9–10 April 2008; pp. 1–3. [Google Scholar]
- Dauderstädt, U.A.; Dürr, P.; Krellmann, M.; Karlin, T.; Berzinsh, U.; Leonardsson, L.; Wendrock, H. Operation of spatial light modulators in DUV light. In Proceedings of the MOEMS Display and Imaging Systems, San Jose, CA, USA, 25–31 January 2003; Volume 4985, pp. 215–222. [Google Scholar] [CrossRef]
- Berndt, D. Optische Kalibrierung von Diffraktiven Mikrospiegelarrays. Ph.D. Thesis, Technische Universität Dresden, Dresden, Germany, 2013. [Google Scholar]
- Mai, A. Aluminium Based Micro Mirrors Exposed to UV Laser Light—In Situ Performance and Degradation. Ph.D. Thesis, BTU Cottbus-Senftenberg, Cottbus, Germany, 2014. [Google Scholar]
- Berndt, D.; Heber, J.; Sinning, S.; Kunze, D.; Knobbe, J.; Schmidt, J.U.; Bring, M.; Rudloff, D.; Friedrichs, M.; Rössler, J.; et al. Multispectral characterization of diffractive micromirror arrays. In Proceedings of the Optical Micro- and Nanometrology III, Brussels, Belgium, 12–16 April 2010; Volume 7718. [Google Scholar] [CrossRef]
- Sicker, C. Grundlegende Untersuchungen zur Phasenmodulation von Licht im Subnanometer-Bereich Durch Diffraktive Mikrospiegelarrays. Ph.D. Thesis, BTU Cottbus-Senftenberg, Cottbus, Germany, 2018. [Google Scholar]
- Sicker, C.; Heber, J.; Berndt, D. Subnanometer calibration of diffractive micromirror arrays. In Proceedings of the European Optical Society Biennial Meeting, EOSAM 2018, Delft, The Netherlands, 8–12 October 2018. [Google Scholar]
- Ventura, L.G.D.M.; Wolschke, S.; Skupsch, C.; Berndt, D. Development of an illumination module for stroboscopic phase-shift interferometry on MEMS devices. In Proceedings of the Optical Measurement Systems for Industrial Inspection XI, Munich, Germany, 24–27 June 2019; Volume 11056. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dauderstädt, U.; Dürr, P.; Gehner, A.; Wagner, M.; Schenk, H. Analog Spatial Light Modulators Based on Micromirror Arrays. Micromachines 2021, 12, 483. https://doi.org/10.3390/mi12050483
Dauderstädt U, Dürr P, Gehner A, Wagner M, Schenk H. Analog Spatial Light Modulators Based on Micromirror Arrays. Micromachines. 2021; 12(5):483. https://doi.org/10.3390/mi12050483
Chicago/Turabian StyleDauderstädt, Ulrike, Peter Dürr, Andreas Gehner, Michael Wagner, and Harald Schenk. 2021. "Analog Spatial Light Modulators Based on Micromirror Arrays" Micromachines 12, no. 5: 483. https://doi.org/10.3390/mi12050483
APA StyleDauderstädt, U., Dürr, P., Gehner, A., Wagner, M., & Schenk, H. (2021). Analog Spatial Light Modulators Based on Micromirror Arrays. Micromachines, 12(5), 483. https://doi.org/10.3390/mi12050483