Research Status and Development Trend of MEMS Switches: A Review


Abstract
1. Introduction
2. Performance Indicators of MEMS Switches
3. Classification of MEMS Switches Based on Driving Principles
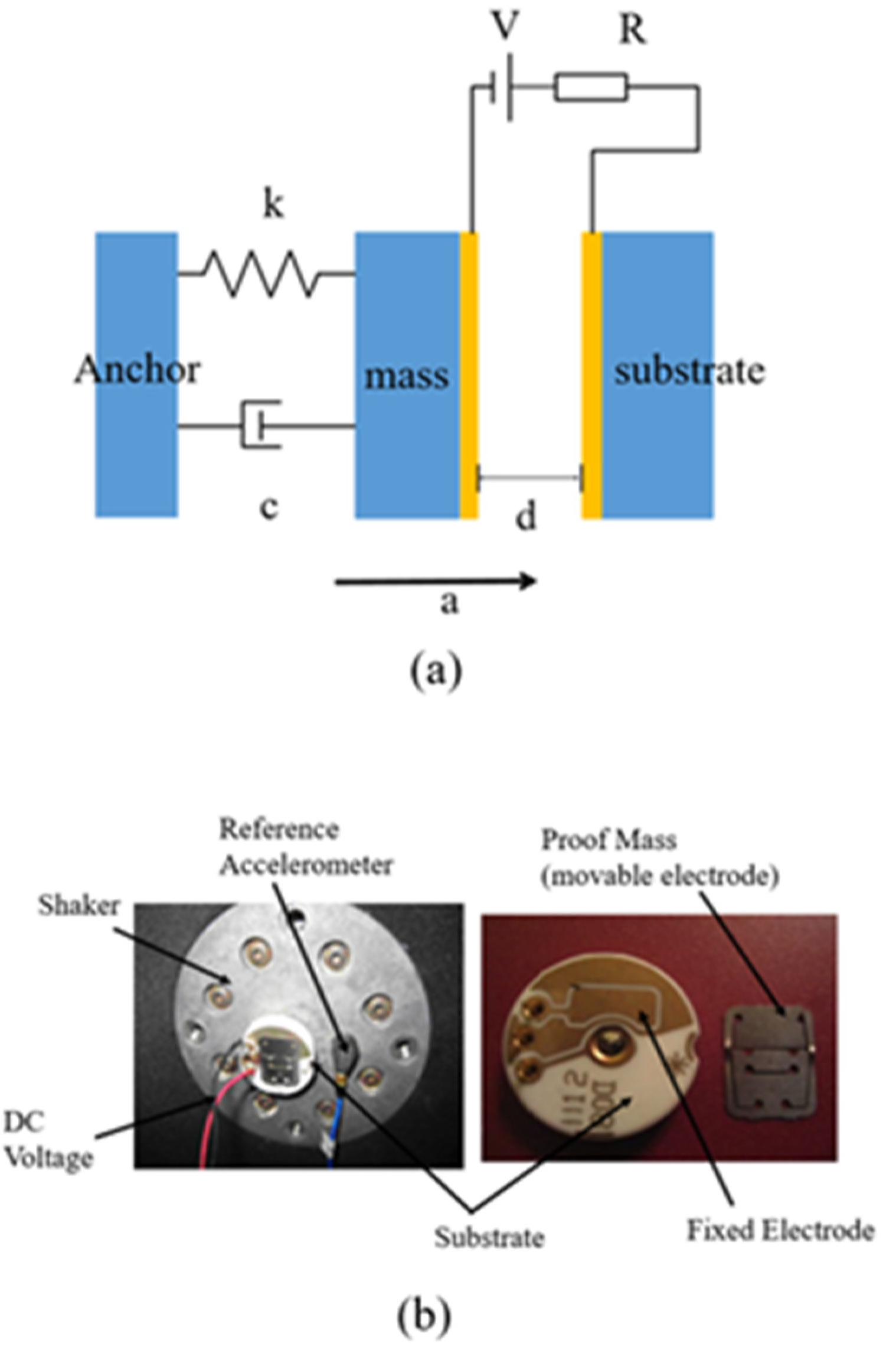
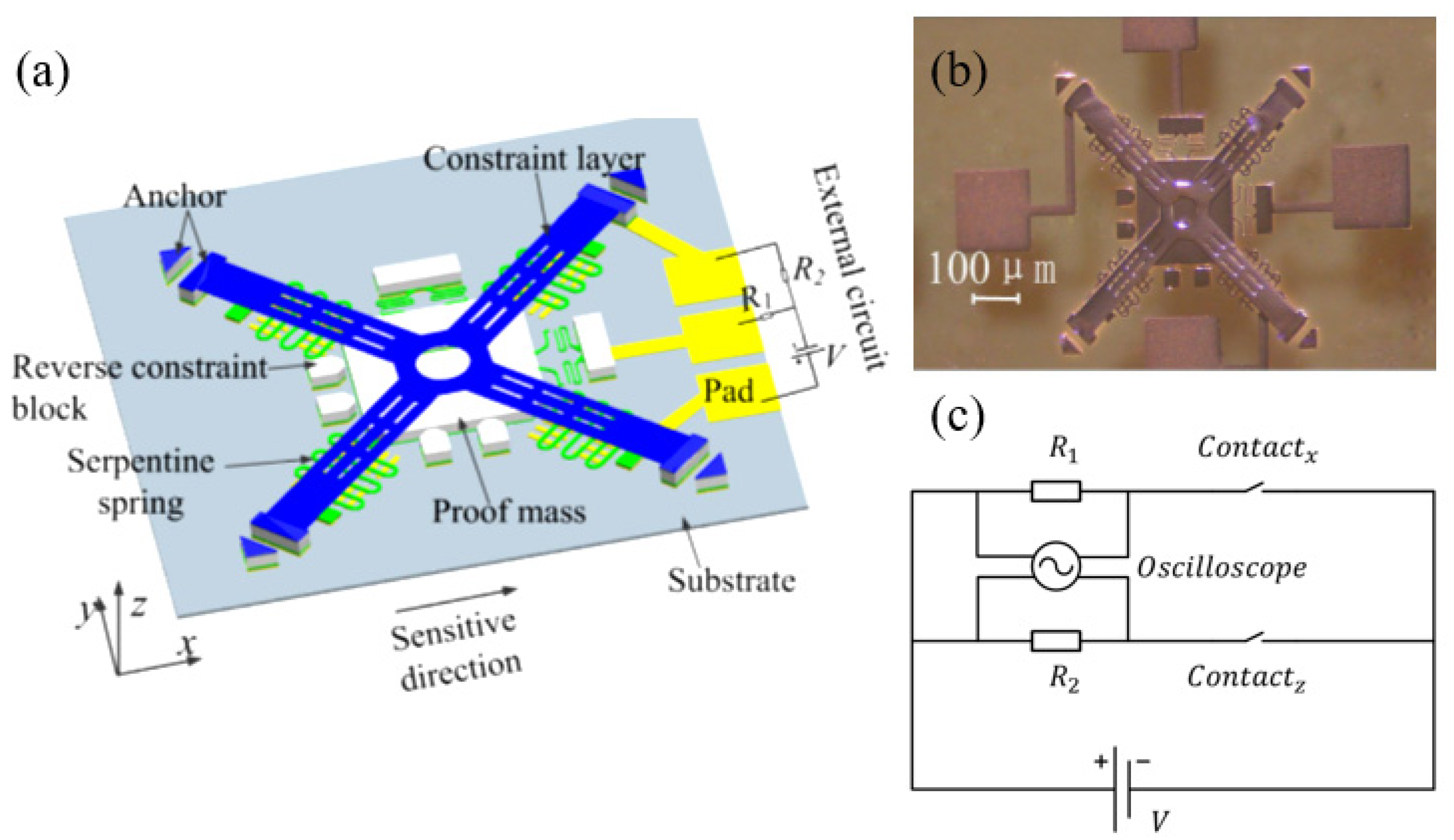
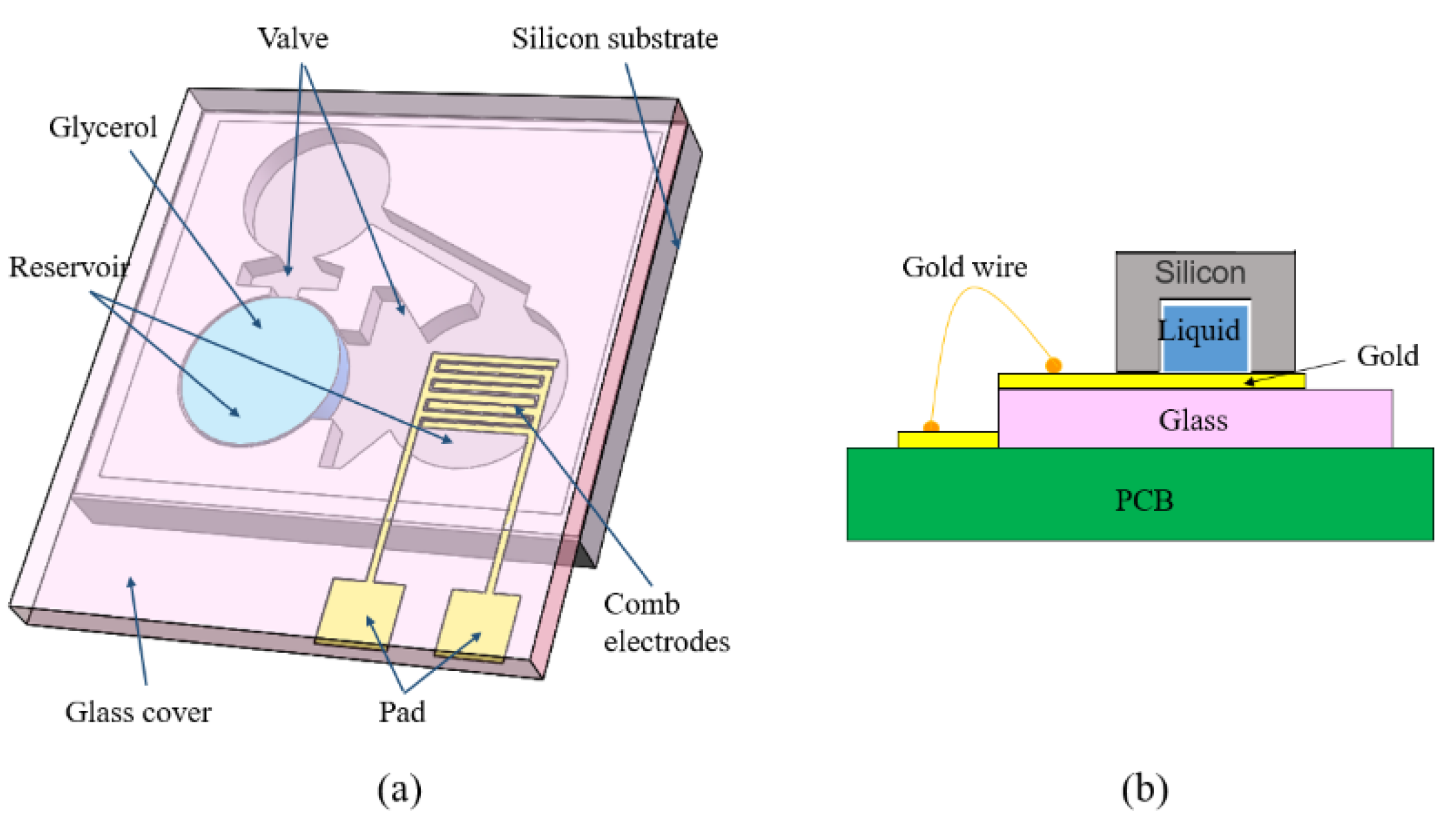
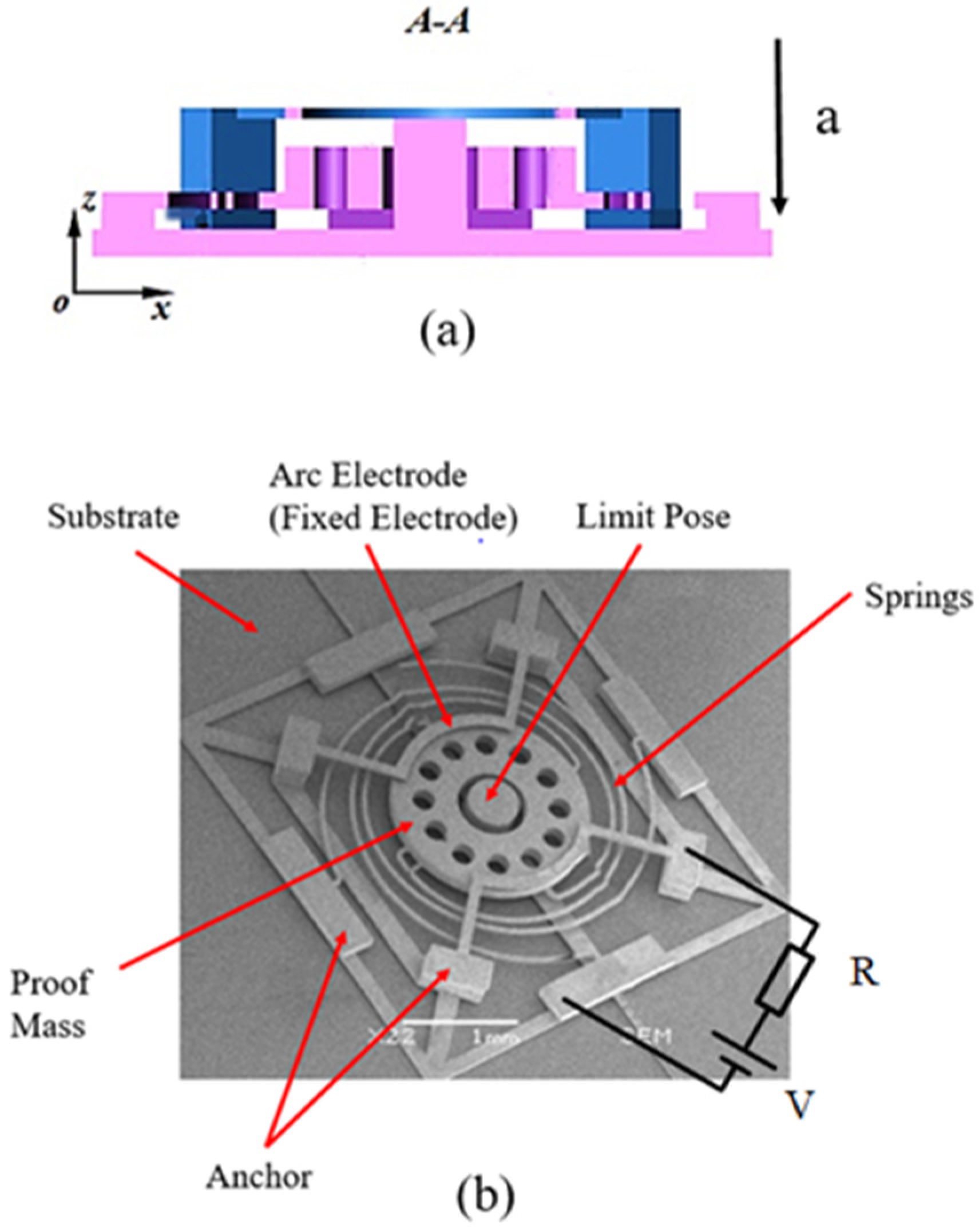
3.1. Passive Inertial Switches
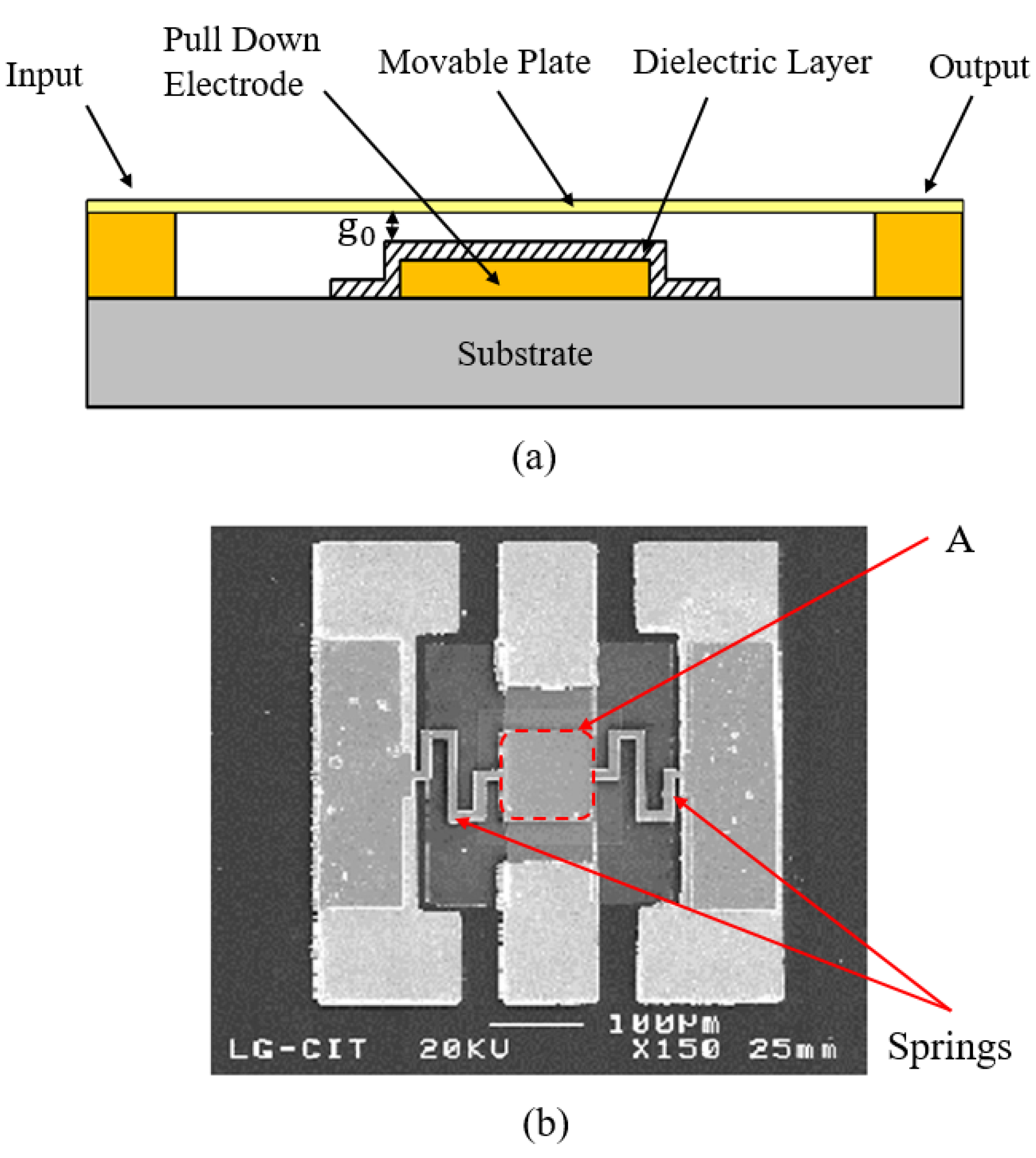
3.2. Electrostatic Switches
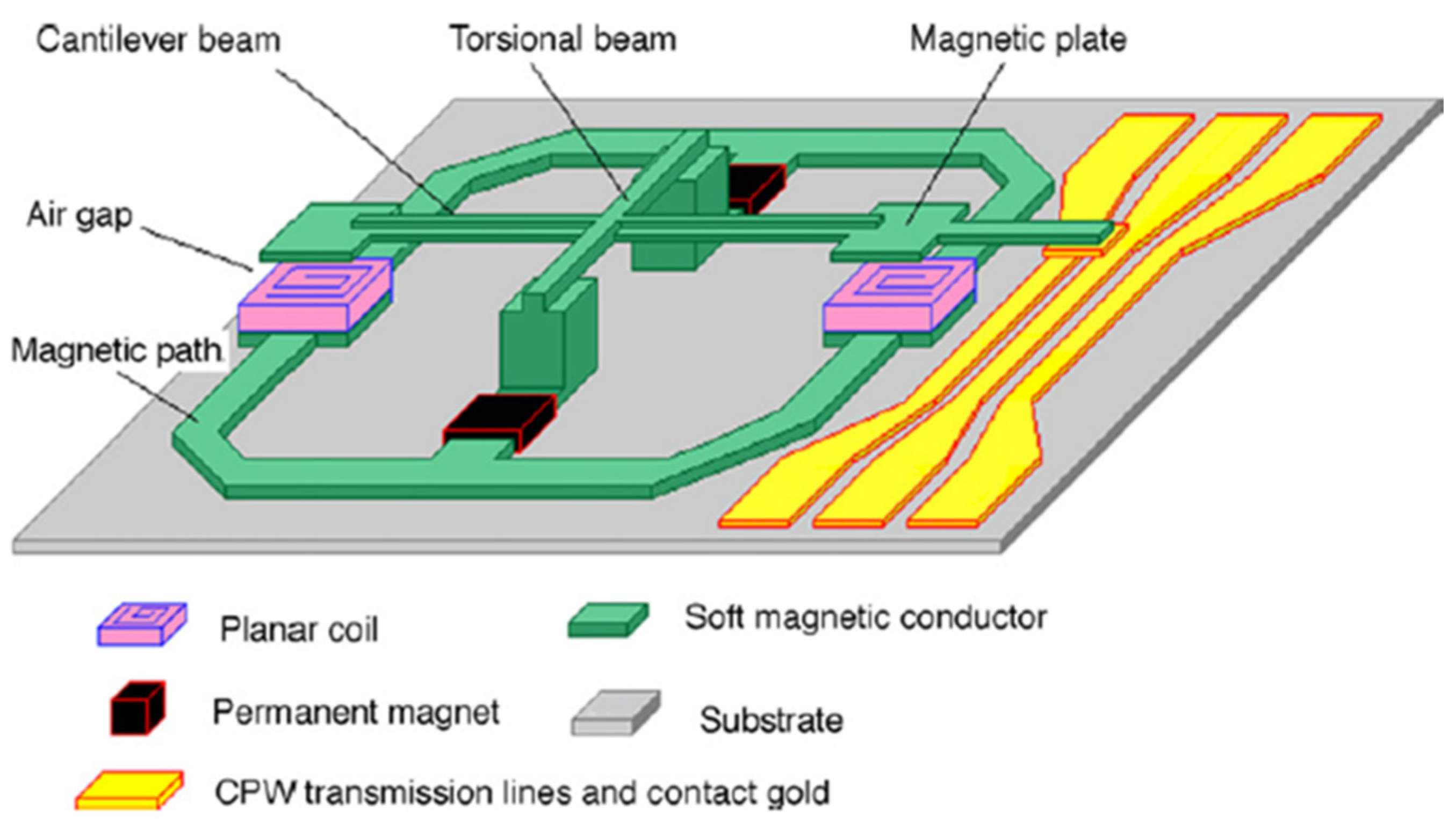
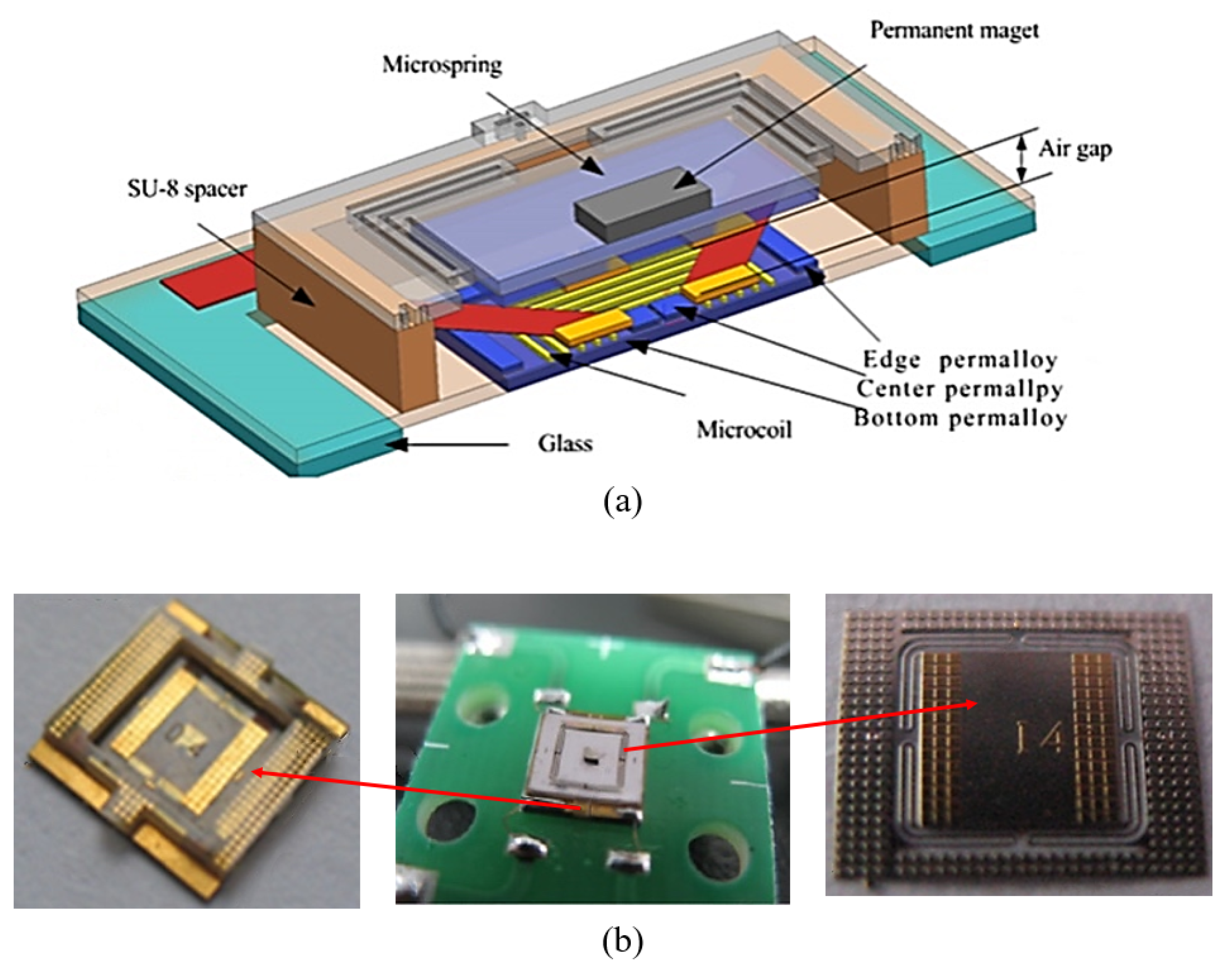
3.3. Electromagnetic Switch
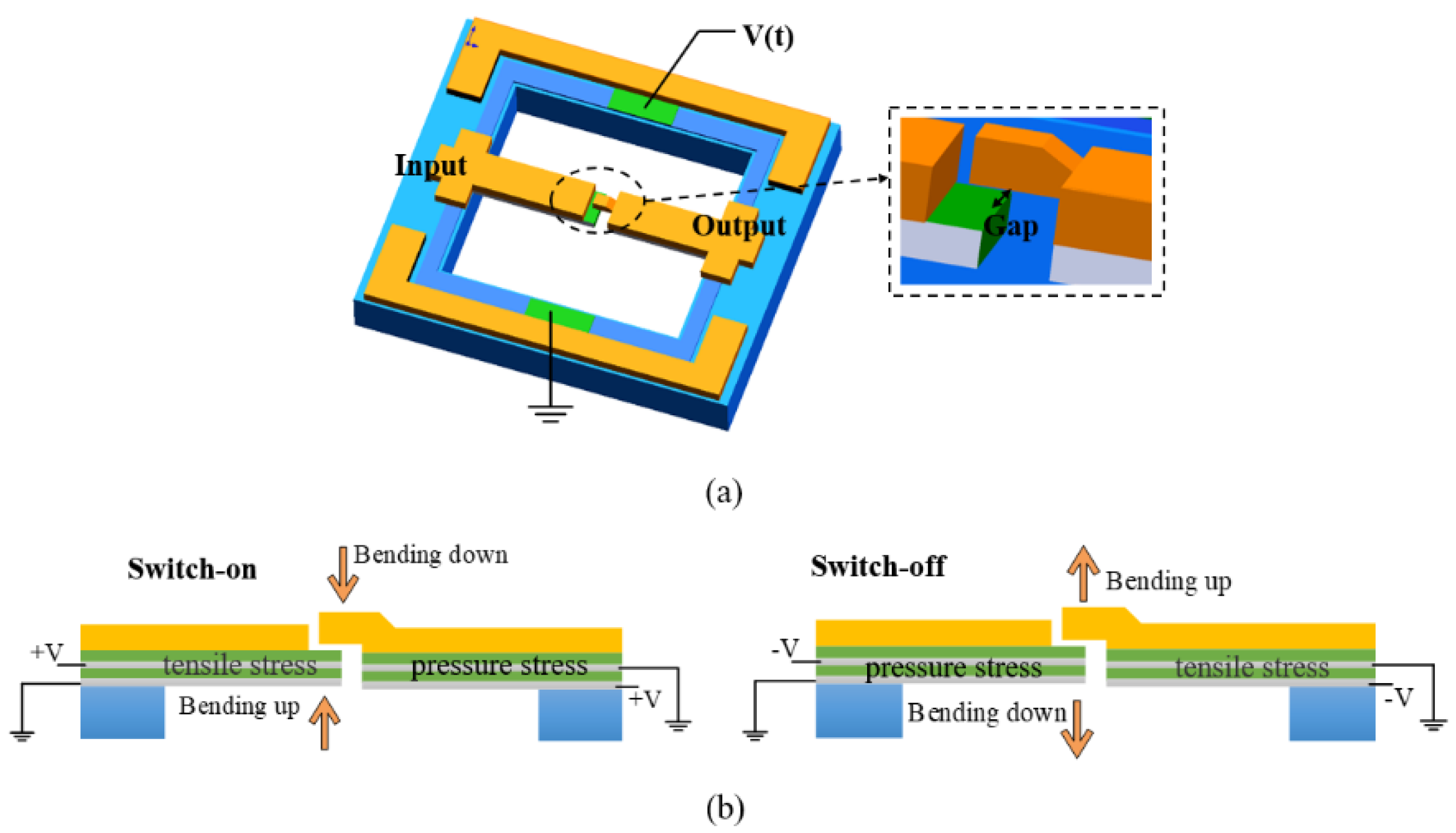
3.4. Piezoelectric Switch
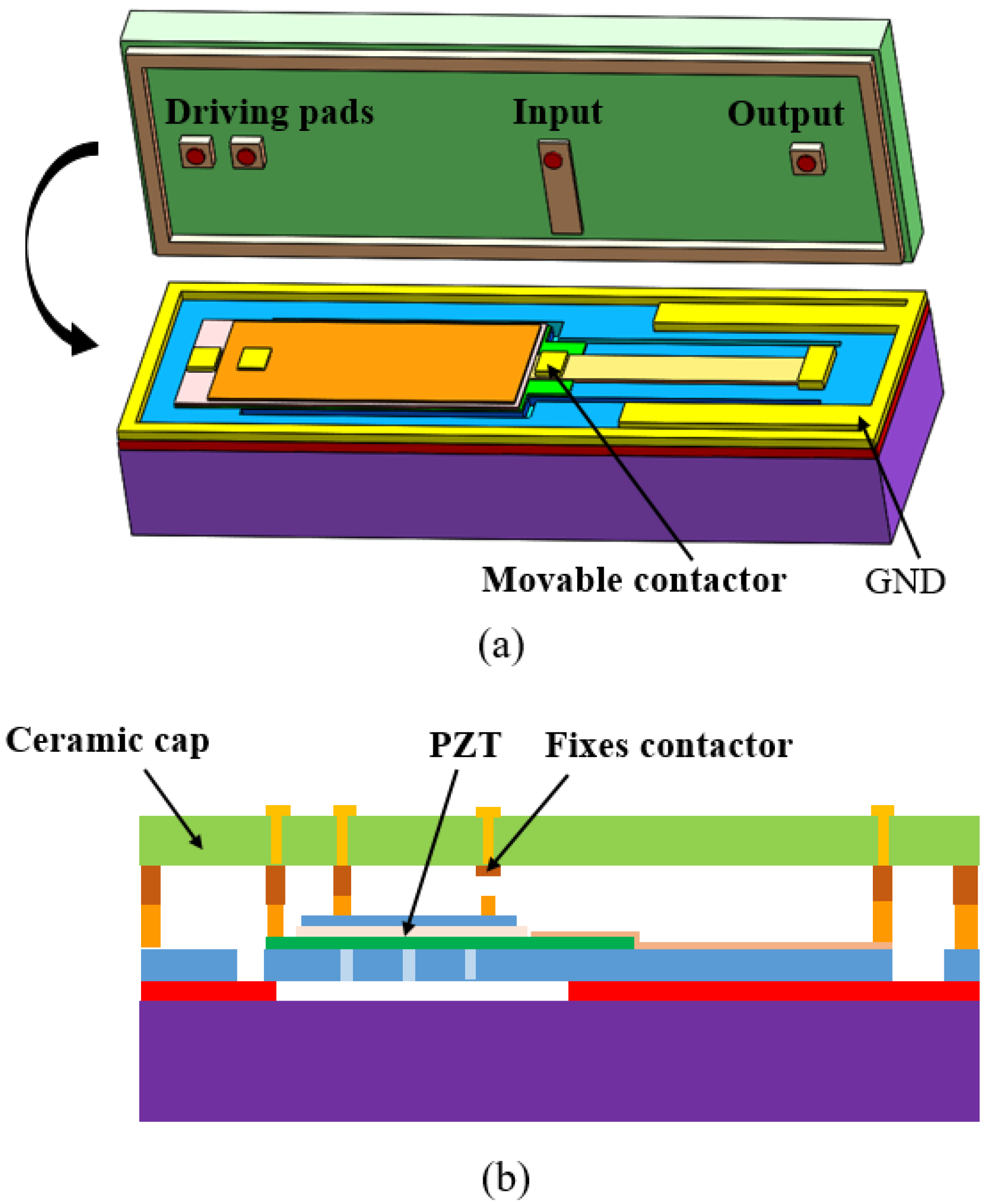
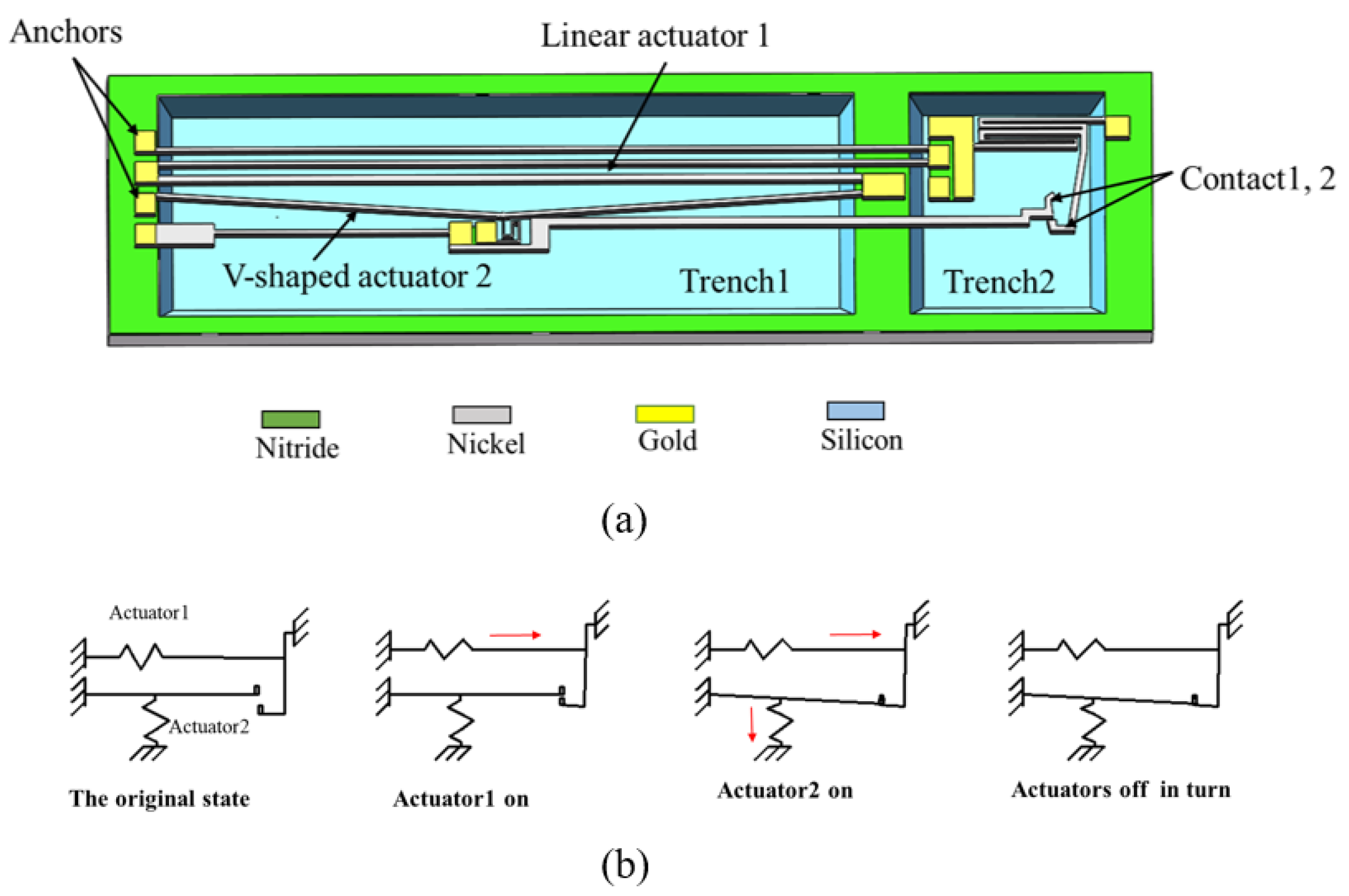
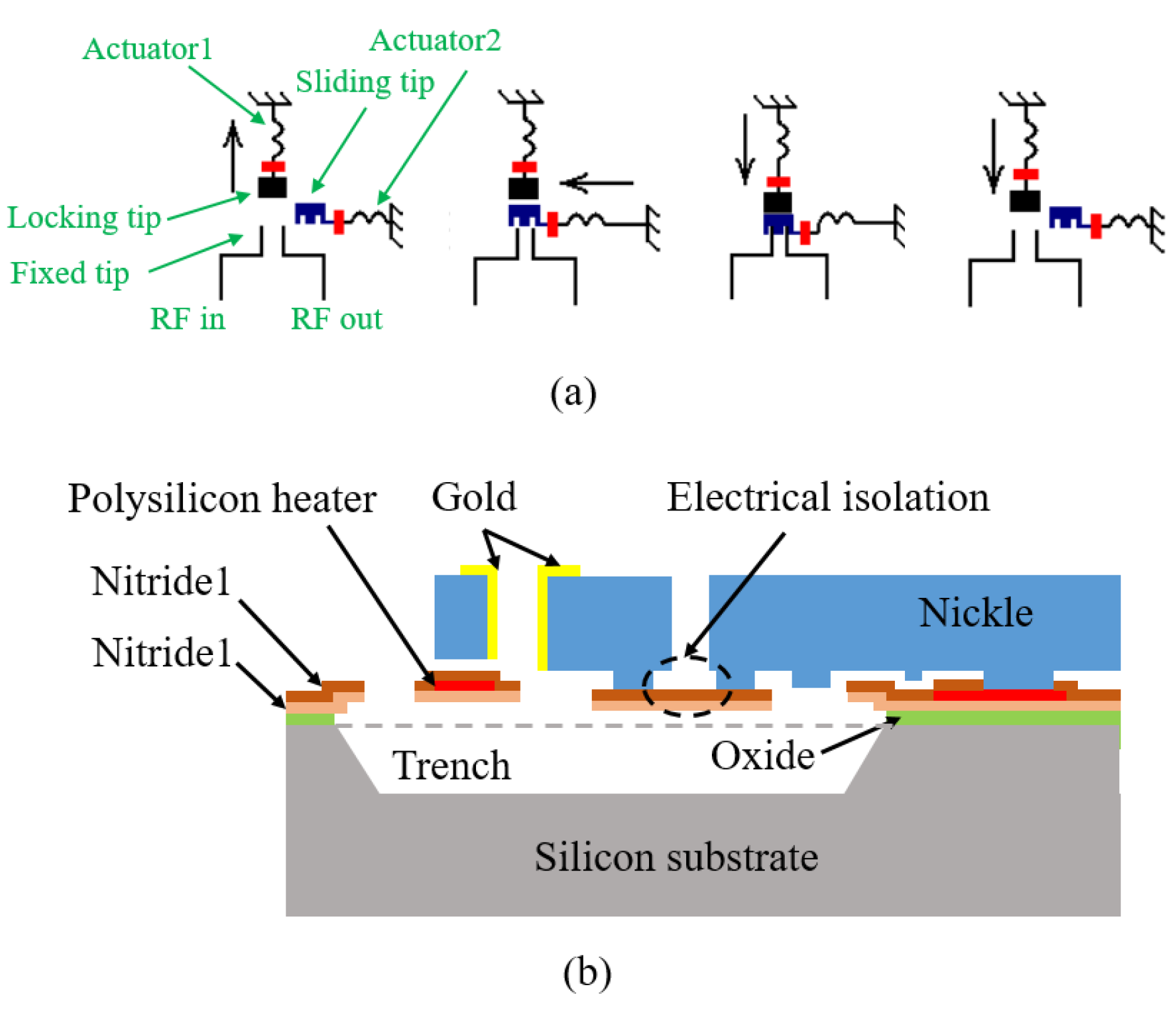
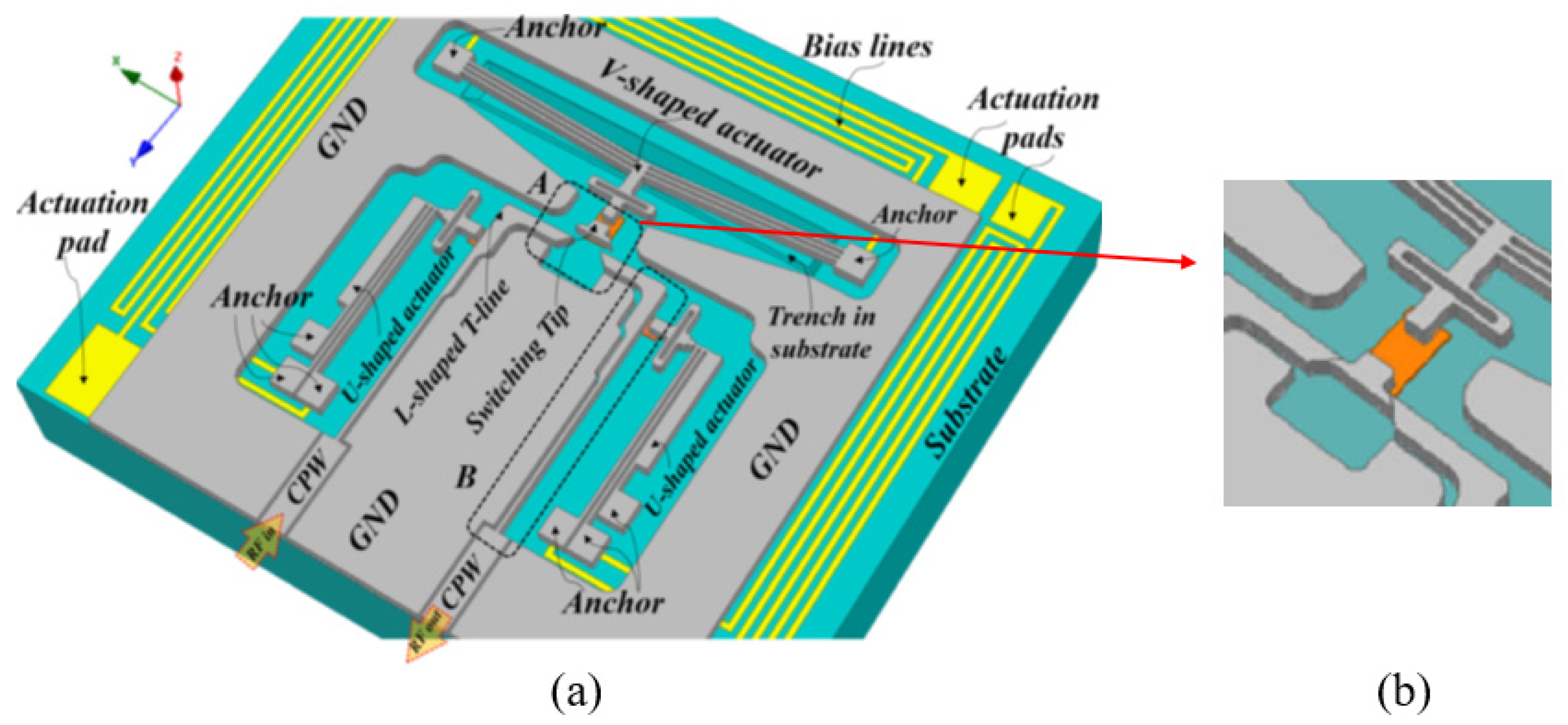
3.5. Electrothermal Switch
3.6. Multiple-Actuation Switch
3.7. MOEMS Optical Switch
4. The Development Trend of MEMS Switches
5. Summary and Outlook
Funding
Conflicts of Interest
References
- Lucyszyn, S. Advanced RF MEMS; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Huang, C.; Zhang, B.; Duan, J. Research Progresses and Applications of RF MEMS Switches. Micronanoelectron. Technol. 2018, 55, 652–659. [Google Scholar]
- Mafinejad, Y.; Ansari, H.R.; Khosroabadi, S. Development and optimization of RF MEMS switch. Microsyst. Technol. 2019, 26, 1253–1263. [Google Scholar] [CrossRef]
- Xi, Z.; Zhang, P.; Nie, W.; Du, L.; Cao, Y. A novel MEMS omnidirectional inertial switch with flexible electrodes. Sens. Actuators A Phys. 2014, 212, 93–101. [Google Scholar] [CrossRef]
- Yoo, K.; Kim, J. A Novel Configurable MEMS Inertial Switch using Microscale Liquid-Metal Droplet. In Proceedings of the 2009 IEEE 22nd International Conference on Micro Electro Mechanical Systems, Sorrento, Italy, 25–29 January 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2009; pp. 793–796. [Google Scholar]
- Huang, Y.-C.; Sung, W.-L.; Lai, W.-C.; Liu, C.-Y.; Fang, W. Design and implementation of time-delay switch triggered by inertia load. In Proceedings of the 2013 IEEE 26th International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 729–732. [Google Scholar]
- Li, L.; Nie, W.; Xi, Z.; Huang, L. Structure Design and Simulation of a New Microfluidic Inertia Switch. Micronanoelectron. Technol. 2015, 52, 289–293. [Google Scholar]
- Du, L.; Wang, W.; Du, C.; Zhao, J.; Zhao, M.; Liu, X. A novel contact-enhanced low-g inertial switch with low-stiffness fixed electrode. Microsyst. Technol. 2019, 26, 395–404. [Google Scholar] [CrossRef]
- Lee, J.-I.; Song, Y.; Jung, H.; Choi, J.; Eun, Y.; Kim, J. Deformable Carbon Nanotube-Contact Pads for Inertial Microswitch to Extend Contact Time. IEEE Trans. Ind. Electron. 2011, 59, 4914–4920. [Google Scholar] [CrossRef]
- Park, J.Y.; Kim, G.H.; Chung, K.W.; Bu, J.U. Monolithically integrated micromachined RF MEMS capacitive switches. Sens. Actuators A Phys. 2001, 89, 88–94. [Google Scholar] [CrossRef]
- Mahameed, R.; Sinha, N.; Pisani, M.B.; Piazza, G. Dual-beam actuation of piezoelectric AlN RF MEMS switches monolithically integrated with AlN contour-mode resonators. J. Micromech. Microeng. 2008, 18, 105011. [Google Scholar] [CrossRef][Green Version]
- Kundu, A.; Sethi, S.; Mondal, N.; Gupta, B.; Lahiri, S.; Saha, H. Analysis and optimization of two movable plates RF MEMS switch for simultaneous improvement in actuation voltage and switching time. Microelectron. J. 2010, 41, 257–265. [Google Scholar] [CrossRef]
- Zolfaghari, P.; Arzhang, V.; Zolfaghari, M. A low loss and power efficient micro-electro-thermally actuated RF MEMS switch for low power and low loss applications. Microsyst. Technol. 2018, 24, 3019–3032. [Google Scholar] [CrossRef]
- Liu, L.; Hu, L.; Chou, X. Development of RF MEMS switch technology. Appl. Electron. Tech. 2016, 11, 20–23. [Google Scholar]
- Xu, Y.; Tian, Y.; Zhang, B.; Duan, J.; Yan, L. A novel RF MEMS switch on frequency reconfigurable antenna application. Microsyst. Technol. 2018, 24, 3833–3841. [Google Scholar] [CrossRef]
- Ongkodjojo, A.; Tay, F.E.H. Optimized design of a micromachined G-switch based on contactless configuration for health care applications. J. Phys. Conf. Ser. 2006, 34, 1044–1052. [Google Scholar] [CrossRef]
- Tsai, C.-H.; Tsai, J.-C. MEMS optical switches and interconnects. Displays 2015, 37, 33–40. [Google Scholar] [CrossRef]
- Mellette, W.M.; Schuster, G.M.; Porter, G.; Papen, G.; Ford, J.E. A Scalable, Partially Configurable Optical Switch for Data Center Networks. J. Light. Technol. 2017, 35, 136–144. [Google Scholar] [CrossRef]
- Gadalla, M.; François, V.; Ung, B. VCSELs to Multicore Fiber Reconfigurable Optical Switch Based on Diffractive MEMS mirrors. In Proceedings of the Optical Fiber Communication Conference, Los Angeles, CA, USA, 19–23 March 2017; The Optical Society: Washington, DC, USA, 2017. [Google Scholar]
- Gopalan, A.; Kommuri, U.K. Design and development of miniaturized low voltage triangular RF MEMS switch for phased array application. Appl. Surf. Sci. 2018, 449, 340–345. [Google Scholar] [CrossRef]
- Xi, Z.; Kong, N.; Nie, W.; Cao, Y.; Zheng, C. High g MEMS inertial switch capable of direction detection. Sens. Actuators A Phys. 2019, 296, 7–16. [Google Scholar] [CrossRef]
- Du, L.; Li, Y.; Zhao, J.; Wang, W.; Zhao, W.; Zhao, W.; Zhu, H. A low-g MEMS inertial switch with a novel radial electrode for uniform omnidirectional sensitivity. Sens. Actuators A Phys. 2018, 270, 214–222. [Google Scholar] [CrossRef]
- Li, J.; Sun, Y.; Wang, Y.; Yang, Z.; Ding, G.; Wang, H.; Zhao, X. A MEMS inertial switch with electrostatic force assistance and multi-step pull-in for eliminating bounce and prolonging contact time. In Proceedings of the 2017 19th International Conference on Solid-State Sensor, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 183–186. [Google Scholar]
- Yang, S.; Xu, Q. A review on actuation and sensing techniques for MEMS-based microgrippers. J. Micro-Bio Robot. 2017, 13, 1–14. [Google Scholar] [CrossRef]
- Li, T.; Li, L.; Zhang, G.; Zhou, D.; Chang, X. Propulsion mechanisms and applications of multiphysics- driven micro- and nanomotors. Chin. Sci. Bull. 2016, 62, 122–135. [Google Scholar] [CrossRef]
- Cai, W.; Li, C.; Luan, S. SOI RF Switch for Wireless Sensor Network. arXiv 2017, arXiv:1701.01763. [Google Scholar]
- Kageyama, T.; Shinozaki, K.; Zhang, L.; Lu, J.; Takaki, H.; Lee, S.-S. An ohmic contact type RF-MEMS switch having Au-Au/CNTs contacts. In Proceedings of the 2017 IEEE 12th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Los Angeles, CA, USA, 9–12 April 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 287–290. [Google Scholar]
- Joshitha, C.; Sreeja, B.S.; Princy, S.S.; Radha, S. Fabrication and investigation of low actuation voltage curved beam bistable MEMS switch. Microsyst. Technol. 2016, 23, 4553–4566. [Google Scholar] [CrossRef]
- Xiong, Z.; Zhang, F.; Pu, Y.; Tang, B.; Yang, J.; Wang, C. A silicon based low-g MEMS inertial switch for linear acceleration sensing application. In Proceedings of the 2015 International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO), Changchun, China, 5–9 October 2015; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2015; pp. 302–305. [Google Scholar]
- Nie, W.; Zhou, Z.; Xi, Z.; Bu, C.; Luo, Q. A novel dual-threshold MEMS acceleration latching switch. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Kauai, HI, USA, 27–30 March 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 54–57. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, W.; Liu, C. Research on the process of fabricating a multi-layer metal micro-structure based on UV-LIGA overlay technology. Nanotechnol. Precis. Eng. 2019, 2, 83–88. [Google Scholar] [CrossRef]
- Shojaei-Asanjan, D.; Bakri-Kassem, M.; Mansour, R.R. Analysis of Thermally Actuated RF-MEMS Switches for Power Limiter Applications. J. Microelectromech. Syst. 2019, 28, 107–113. [Google Scholar] [CrossRef]
- Verma, P.; Khan, K.Z.; Fomchenkov, S.; Gopal, R. SU-8 Based UV-LIGA Fabrication Process for Realization of Nickel Based MEMS Inertial Sensor; Samara State National Research University: Samara, Russia, 2016; pp. 149–158. [Google Scholar]
- Saha, R.; Maity, S.; Devi, N.M.; Bhunia, C.T. Analysis of Pull-in-Voltage and Figure-of-Merit of Capacitive MEMS Switch. Trans. Electr. Electron. Mater. 2016, 17, 129–133. [Google Scholar] [CrossRef]
- Angira, M.; Bansal, D.; Kumar, P.; Mehta, K.; Rangra, K. A novel capacitive RF-MEMS switch for multi-frequency operation. Superlattices Microstruct. 2019, 133. [Google Scholar] [CrossRef]
- Ansari, H.; Taghaddosi, M.B. Optimization and development of the RF MEMS structures for low voltage, high isolation and low stress. Analog. Integr. Circuits Signal Process. 2019, 101, 659–668. [Google Scholar] [CrossRef]
- Ilkhechi, A.K.; Mirzajani, H.; Aghdam, E.N.; Ghavifekr, H.B. A new electrostatically actuated rotary three-state DC-contact RF MEMS switch for antenna switch applications. Microsyst. Technol. 2015, 23, 231–243. [Google Scholar] [CrossRef]
- Sawant, V.; Mohite, S.; Cheulkar, L.N. Comprehensive contact material selection approach for RF MEMS switch. Mater. Today Proc. 2018, 5, 10704–10711. [Google Scholar] [CrossRef]
- Almeida, L.V.; Ramadoss, R.; Jackson, R.L.; Ishikawa, K.; Yu, Q. Laterally actuated multicontact MEMS relay fabricated using MetalMUMPS process: Experimental characterization and multiscale contact modeling. J. Micro/Nanolithogr. Mems Moems 2007, 6, 023009. [Google Scholar] [CrossRef]
- Dellaert, D.; Doutreloigne, J. Compact thermally actuated latching MEMS switch with large contact force. Electron. Lett. 2015, 51, 80–81. [Google Scholar] [CrossRef]
- Bakri-Kassem, M.; Mansour, R.R. A Novel Latching RF MEMS SPST Switch. In Proceedings of the European Microwave Integrated Circuits Conference, Amsterdam, The Netherlands, 29–30 October 2012; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2012. [Google Scholar]
- Bakri-Kassem, M.; Mansour, R.R. High Power Latching RF MEMS Switches. IEEE Trans. Microw. Theory Tech. 2014, 63, 222–232. [Google Scholar] [CrossRef]
- Ouakad, H. Structural Behavior of Microbeams Actuated by Out-of-Plane Electrostatic Fringing-Fields. In Proceedings of the ASME International Mechanical Engineering Congress & Exposition, San Diego, CA, USA, 15–21 November 2013; ASME: New York, NY, USA, 2013; Volume 10. [Google Scholar] [CrossRef]
- Krylov, S.; Ilic, B.R.; Lulinsky, S. Bistability of curved microbeams actuated by fringing electrostatic fields. Nonlinear Dyn. 2011, 66, 403–426. [Google Scholar] [CrossRef]
- Pustan, M.; Birleanu, C.; Dudescu, C.; Muller, R.; Baracu, A. Integrated thermally actuated MEMS switch with the signal line for the out-of-plane actuation. In Proceedings of the 2018 Symposium on Design, Test, Integration & Packaging of MEMS and MOEMS (DTIP), Roma, Italy, 22–25 May 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Reid, J.R. Simulation and measurement of dielectric charging in electrostatically actuated capacitive microwave switches. In Proceedings of the 2002 International Conference on Modeling and Simulation of Microsystems, Technical Proceedings, San Juan, PR, USA, 22–25 April 2002; pp. 250–253. [Google Scholar]
- Van Spengen, W.M.; Puers, R.; Mertens, R.; De Wolf, I. A comprehensive model to predict the charging and reliability of capacitive RF MEMS switches. J. Micromech. Microeng. 2004, 14, 514–521. [Google Scholar] [CrossRef]
- Zaghloul, U.; Bhushan, B.; Coccetti, F.; Pons, P.; Plana, R. Kelvin probe force microscopy-based characterization techniques applied for electrostatic MEMS/NEMS devices and bare dielectric films to investigate the dielectric and substrate charging phenomena. J. Vac. Sci. Technol. A 2011, 29, 51101. [Google Scholar] [CrossRef]
- Bordas, C.; Grenier, K.; Dubuc, D.; Flahaut, E.; Pacchini, S.; Paillard, M.; Cazaux, J.-L. Carbon Nanotube Based Dielectric for Enhanced RF MEMS Reliability. In Proceedings of the 2007 IEEE/MTT-S International Microwave Symposium, Honolulu, HI, USA, 3–8 June 2007; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 375–378. [Google Scholar] [CrossRef]
- Goldsmith, C.; Forehand, D.; Scarbrough, D.; Peng, Z.; Palego, C.; Hwang, J.; Clevenger, J. Understanding and improving longevity in RF MEMS capacitive switches. In Proceedings of the MOEMS-MEMS 2008 Micro and Nanofabrication, San Jose, CA, USA, 21–22 January 2008. [Google Scholar]
- Zhang, Y.; Lu, J.; Onodera, K.; Maeda, R. Development of hafnium oxynitride dielectrics for radio-frequency-microelectromechanical system capacitive switches. Sens. Actuators A Phys. 2007, 139, 337–342. [Google Scholar] [CrossRef]
- Daigler, R.; Papaioannou, G.; Papandreou, E.; Papapolymerou, J. Effect of dielectric film thickness on dielectric charging of RF MEMS capacitive switches. In Proceedings of the 2008 IEEE MTT-S International Microwave Symposium Digest, Atlanta, GA, USA, 15–20 June 2008; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 1275–1278. [Google Scholar] [CrossRef]
- Giacomozzi, F.; Mulloni, V.; Colpo, S.; Iannacci, J.; Margesin, B.; Fondazione, A.F.; Kessler, B. A flexible fabrication process for RF MEMS devices. Rom. J. Inf. Ence Technol. 2011, 14, 259–268. [Google Scholar]
- Wong, W.; Lai, C.H. Longer MEMS Switch Lifetime Using Novel Dual-Pulse Actuation Voltage. IEEE Trans. Device Mater. Reliab. 2009, 9, 569–575. [Google Scholar] [CrossRef]
- Peng, Z.; Yuan, X.; Hwang, J.C.M.; Forehand, D.I.; Goldsmith, C.L. Superposition Model for Dielectric Charging of RF MEMS Capacitive Switches Under Bipolar Control-Voltage Waveforms. IEEE Trans. Microw. Theory Tech. 2007, 55, 2911–2918. [Google Scholar] [CrossRef]
- Toler, B.F.; A Coutu, R.; McBride, J.W. A review of micro-contact physics for microelectromechanical systems (MEMS) metal contact switches. J. Micromech. Microeng. 2013, 23, 103001. [Google Scholar] [CrossRef]
- Basu, A.; Adams, G.G.; E McGruer, N. A review of micro-contact physics, materials, and failure mechanisms in direct-contact RF MEMS switches. J. Micromech. Microeng. 2016, 26, 104004. [Google Scholar] [CrossRef]
- Ke, F.; Miao, J.; Oberhammer, J. A Ruthenium-Based Multimetal-Contact RF MEMS Switch with a Corrugated Diaphragm. J. Microelectromech. Syst. 2008, 17, 1447–1459. [Google Scholar] [CrossRef]
- Yang, Z.; Lichtenwalner, D.; Morris, A.; Krim, J.; Kingon, A. Comparison of Au and Au–Ni Alloys as Contact Materials for MEMS Switches. J. Microelectromech. Syst. 2009, 18, 287–295. [Google Scholar] [CrossRef]
- Yaglioglu, O.; Hart, A.J.; Martens, R.; Slocum, A.H. Method of characterizing electrical contact properties of carbon nanotube coated surfaces. Rev. Sci. Instrum. 2006, 77, 95105. [Google Scholar] [CrossRef]
- Wan, B.; Fu, G.; Li, Y.; Zhao, Y.; Jia, M. Failure analysis of the electromagnetic relay contacts. Eng. Fail. Anal. 2016, 59, 304–313. [Google Scholar] [CrossRef]
- Xi, W.; ElSinawi, A.; Guha, K.; Karumuri, S.R.; Shaikh-Ahmad, J. A study of the effect of transient stresses on the fatigue life of RF MEMS switches. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2570. [Google Scholar] [CrossRef]
- Denhoff, M.; Grant, P.; Harry, M.; Yu, M. Fabrication of a microwave MEMS switch. In Proceedings of the Symposium on Antenna Technology and Applied Electromagnetics [ANTEM 2000], Winnipeg, MB, Canada, 30 July–2 August 2000; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2000; pp. 79–82. [Google Scholar] [CrossRef]
- Younis, S.; Khan, F.; Saleem, M.M.; Zaidi, S.M.T. Effect of residual stress on electromagnetic characteristics of capacitive RFMEMS Switch. In Proceedings of the 2017 4th International Conference on Electrical and Electronic Engineering (ICEEE), Dhaka, Bangladesh, 28–30 September 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 130–134. [Google Scholar]
- Dutta, S.; Imran, M.; Pal, R.; Jain, K.K.; Chatterjee, R. Effect of residual stress on RF MEMS switch. Microsyst. Technol. 2011, 17, 1739–1745. [Google Scholar] [CrossRef]
- Mulloni, V.; Barbato, M.; Meneghesso, G. Long-term lifetime prediction for RF-MEMS switches. J. Micromech. Microeng. 2016, 26, 74004. [Google Scholar] [CrossRef]
- Shivhare, P.; Gandhi, U.; Umapathy, M. Design enhancement of a chevron electrothermally actuated microgripper for improved gripping performance. Microsyst. Technol. 2015, 22, 2623–2631. [Google Scholar] [CrossRef]
- Knick, C.R.; Sharar, D.J.; Wilson, A.; Smith, G.L.; Morris, C.J.; A Bruck, H. High frequency, low power, electrically actuated shape memory alloy MEMS bimorph thermal actuators. J. Micromech. Microeng. 2019, 29, 075005. [Google Scholar] [CrossRef]
- Cao, Y.; Xi, Z. A review of MEMS inertial switches. Microsyst. Technol. 2019, 25, 4405–4425. [Google Scholar] [CrossRef]
- Younis, M.I.; Alsaleem, F.M.; Miles, R.; Su, Q. Characterization of the performance of capacitive switches activated by mechanical shock. J. Micromech. Microeng. 2007, 17, 1360–1370. [Google Scholar] [CrossRef] [PubMed]
- Available online: http://www.sensata.com (accessed on 18 June 2020).
- Selvakumar, A.; Yazdi, N.; Najafi, K. A wide-range micromachined threshold accelerometer array and interface circuit. J. Micromech. Microeng. 2001, 11, 118–125. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, G.; Cai, H.; Wang, H.; Chen, W.; Zhao, X. Development of a shock acceleration microswitch with enhanced-contact and low off-axis sensitivity. In Proceedings of the TRANSDUCERS 2009—2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2009; pp. 1940–1943. [Google Scholar] [CrossRef]
- Gerson, Y.; Schreiber, D.; Grau, H.; Krylov, S. Meso scale MEMS inertial switch fabricated using an electroplated metal-on-insulator process. J. Micromech. Microeng. 2014, 24, 25008. [Google Scholar] [CrossRef]
- Zhang, Q.; Yang, Z.; Xu, Q.; Wang, Y.; Ding, G.; Zhao, X. Design and fabrication of a laterally-driven inertial micro-switch with multi-directional constraint structures for lowering off-axis sensitivity. J. Micromech. Microeng. 2016, 26, 55008. [Google Scholar] [CrossRef]
- Lin, L.; Zhao, Q.; Yang, Z.; Zhang, D.; Yan, G. Design and simulation of a 2-axis low g acceleration switch with multi-folded beams. In Proceedings of the 12th IEEE International Conference on Solid-State and Integrated Circuit Technology (ICSICT), Guilin, China, 28–31 October 2014 2014; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2014; pp. 1–3. [Google Scholar] [CrossRef]
- Liu, S.-J.; Hao, Y. Annular passive universal MEMS inertial switch. J. Chin. Inert. Technol. 2013, 21, 240–244. [Google Scholar]
- Liu, S.J.; Hao, Y.P.; Liu, F.L. Design and Fabrication of Universal Inertial Switch Based on MEMS Technology. Key Eng. Mater. 2014, 609, 689–695. [Google Scholar] [CrossRef]
- Churaman, W.; Currano, L.J.; Gee, D.; Zakar, E. Three-Axis MEMS Threshold Accelerometer Switch for Enhanced Power Conservation of MEMS Sensors. Adv. Sci. Technol. 2008, 54, 384–389. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Y.; Ding, G.; Wang, H.; Zhao, X.; Yang, Z. Simulation, fabrication and characterization of an all-metal contact-enhanced triaxial inertial microswitch with low axial disturbance. Sens. Actuators A-Phys. 2014, 220, 194–203. [Google Scholar] [CrossRef]
- Currano, L.J.; Becker, C.R.; Lunking, D.; Smith, G.L.; Isaacson, B.; Thomas, L. Triaxial inertial switch with multiple thresholds and resistive ladder readout. Sens. Actuators A-Phys. 2013, 195, 191–197. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, X.; Wang, H.; Yang, Z.; Ding, G.; Wang, Y.; Wang, Z. Tri-axial all-metal inertial microswitch with compliant stationary electrodes to prolong contact time. Micro Nano Lett. 2014, 9, 514–518. [Google Scholar] [CrossRef]
- Xu, Q.; Yang, Z.; Sun, Y.; Lai, L.; Jin, Z.; Ding, G.; Zhao, X.; Yao, J.; Wang, J. Shock-Resistibility of MEMS-Based Inertial Microswitch under Reverse Directional Ultra-High g Acceleration for IoT Applications. Sci. Rep. 2017, 7, 45512. [Google Scholar] [CrossRef] [PubMed]
- Medina, L.; Gilat, R.; Krylov, S. Sub g Threshold Acceleration Sensor Incorporating Latched Bistable Beam. In Proceedings of the12th International Conference on Micro- and Nanosystems, Quebec City, QC, Canada, 26–29 August 2018; ASME International: New York, NY, USA, 2018; Volume 4. [Google Scholar] [CrossRef]
- Lee, H.-N.; Jang, S.-G.; Lee, S.; Lee, J.-S.; Hwang, Y.-S. MEMS Inertial Switch for Military Applications. Proceedings 2017, 1, 343. [Google Scholar] [CrossRef]
- Liu, T.; Su, W.; Yang, T.; Xu, Y. Vibration interference analysis and verification of micro-fluidic inertial switch. AIP Adv. 2014, 4, 31313. [Google Scholar] [CrossRef]
- Xu, Q.; Yang, Z.-Q.; Fu, B.; Bao, Y.-P.; Wu, H.; Sun, Y.-N.; Zhao, M.-Y.; Li, J.; Ding, G.; Zhao, X.-L. Design and Optimization of a Stationary Electrode in a Vertically-Driven MEMS Inertial Switch for Extending Contact Duration. Sensors 2017, 17, 527. [Google Scholar] [CrossRef] [PubMed]
- Kuo, J.; Kuo, P.; Lai, Y.; Ma, C.; Lu, S.; Yang, Y. A Passive Inertial Switch Using MWCNT–Hydrogel Composite with Wireless Interrogation Capability. J. Microelectromech. Syst. 2013, 22, 646–654. [Google Scholar] [CrossRef]
- Kuo, J.-C.; Yang, Y.-J. A passive hydrogel-based inertial switch integrated with micromachined L-C resonator. In Proceedings of the 2012 IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2012; pp. 515–518. [Google Scholar] [CrossRef]
- Lee, Y.; Sim, S.-M.; Kim, H.; Kim, Y.-K.; Kim, J.-M. Silicon MEMS acceleration switch with high reliability using hooked latch. Microelectron. Eng. 2016, 152, 10–19. [Google Scholar] [CrossRef]
- Ma, C.-W.; Huang, P.-C.; Kuo, J.-C.; Kuo, W.-C.; Yang, Y.-J. A novel inertial switch with an adjustable acceleration threshold using an MEMS digital-to-analog converter. Microelectron. Eng. 2013, 110, 374–380. [Google Scholar] [CrossRef]
- Nistor, M.; Wiebe, R.; Stanciulescu, I. Relationship between Euler buckling and unstable equilibria of buckled beams. Int. J. Non-Linear Mech. 2017, 95, 151–161. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Latching in bistable electrostatically actuated curved micro beams. Int. J. Eng. Sci. 2017, 110, 15–34. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, P.; Tang, Z.; Fan, K.; Ma, X.; Gao, R.; Bao, J. A Wireless MEMS Inertial Switch for Measuring Both Threshold Triggering Acceleration and Response Time. IEEE Trans. Instrum. Meas. 2014, 63, 3152–3161. [Google Scholar] [CrossRef]
- Go, J.S.; Cho, Y.-H.; Kwak, B.M.; Park, K. Snapping microswitches with adjustable acceleration threshold. Sensors Actuators A: Phys. 1996, 54, 579–583. [Google Scholar] [CrossRef]
- Frangi, A.A.; De Masi, B.; Confalonieri, F.; Baldasarre, L. Threshold shock sensor based on a bi-stable mechanism. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 626–629. [Google Scholar] [CrossRef]
- Goldsmith, C.; Ehmke, J.; Malczewski, A.; Pillans, B.; Eshelman, S.; Yao, Z.; Brank, J.; Eberly, M. Lifetime characterization of capacitive RF MEMS switches. In Proceedings of the 2001 IEEE MTT-S International Microwave Sympsoium Digest (Cat. No.01CH37157), Phoenix, AZ, USA, 20–24 May 2001; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002; Volume 1, pp. 227–230. [Google Scholar]
- Peroulis, D.; Pacheco, S.; Sarabandi, K.; Katehi, L. Electromechanical considerations in developing low-voltage RF MEMS switches. IEEE Trans. Microw. Theory Tech. 2003, 51, 259–270. [Google Scholar] [CrossRef]
- Das, K.; Batra, R.C. Pull-in and snap-through instabilities in transient deformations of microelectromechanical systems. J. Micromech. Microeng. 2009, 19, 35008. [Google Scholar] [CrossRef]
- Ya, M.L.; Nordin, A.N.; Soin, N. Design and analysis of a low-voltage electrostatic actuated RF CMOS-MEMS switch. In Proceedings of the RSM 2013 IEEE Regional Symposium on Micro and Nanoelectronics, Langkawi, Malaysia, 25–27 September 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 626–629. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, R.; Lai, Z. Reliability of Electrostatic RF MEMS Switches. Micronanoelectron. Technol. 2010, 47, 701–707. [Google Scholar]
- Mafinejad, Y.; Kouzani, A.; Mafinezhad, K. Review of low actuation voltage RF MEMS electrostatic switches based on metallic and carbon alloys. Informacije Midem 2013, 43, 85–96. [Google Scholar]
- Yamaletdinov, R.D.; Ivakhnenko, O.V.; Sedelnikova, O.V.; Shevchenko, S.N.; Pershin, Y.V. Snap-through transition of buckled graphene membranes for memcapacitor applications. Sci. Rep. 2018, 8, 1–13. [Google Scholar] [CrossRef]
- Asher, A.; Benjamin, E.; Medina, L.; Gilat, R.; Krylov, S. Bistable Micro Caps Fabricated by Sheet Metal Forming. J. Micromech. Microeng. 2020, 30, 065002. [Google Scholar] [CrossRef]
- Irthiea, I.K.; Green, G. Evaluation of micro deep drawing technique using soft die-simulation and experiments. Int. J. Adv. Manuf. Technol. 2016, 89, 2363–2374. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Bistability criterion for electrostatically actuated initially curved micro plates. Int. J. Eng. Sci. 2018, 130, 75–92. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Bistable behavior of electrostatically actuated initially curved micro plate. Sens. Actuators A: Phys. 2016, 248, 193–198. [Google Scholar] [CrossRef]
- Delijani, F.; Fard, A. Improve the Reliability and Increased Lifetime of Comb Drive Structure in RF MEMS Switch. In Proceedings of the First International Conference on Fundamental Research in Electrical Engineering, Tehran, Iran, July 2017; Springer: Singapore, 2019; pp. 473–482. [Google Scholar]
- Khodadady, K.; Ganji, B.A. Design and modeling of a novel RF MEMS series switch with low actuation voltage. Microsyst. Technol. 2015, 22, 2921–2929. [Google Scholar] [CrossRef]
- Younis, S.; Saleem, M.M.; Zubair, M.; Zaidi, S.M.T. Multiphysics design optimization of RF-MEMS switch using response surface methodology. Microelectron. J. 2018, 71, 47–60. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, Y. Electrostatic Comb-Drived Actuator for MEMS Relay/Switch. In Micro/Nano Technologies; Springer: Singapore, 2018; pp. 907–927. [Google Scholar]
- Naito, Y.; Nakamura, K.; Uenishi, K. Laterally Movable Triple Electrodes Actuator toward Low Voltage and Fast Response RF-MEMS Switches. Sensors 2019, 19, 864. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Shim, E.S.; Choi, W.; Kim, Y.; Kwon, Y.-S.; Cho, D.-I.D. A Non-Contact-Type RF MEMS Switch for 24-GHz Radar Applications. J. Microelectromech. Syst. 2009, 18, 163–173. [Google Scholar] [CrossRef]
- Chu, C.-H.; Shih, W.-P.; Chung, S.-Y.; Tsai, H.-C.; Shing, T.-K.; Chang, P.-Z. A low actuation voltage electrostatic actuator for RF MEMS switch applications. J. Micromech. Microeng. 2007, 17, 1649–1656. [Google Scholar] [CrossRef]
- Agrawal, V.; Mitra, B. Study and Analysis of Hollow Bistable MEMS Switch. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Charlot, B.; Sun, W.; Yamashita, K.; Fujita, H.; Toshiyoshi, H. Bistable nanowire for micromechanical memory. J. Micromech. Microeng. 2008, 18, 45005. [Google Scholar] [CrossRef]
- Choi, W.Y.; Kam, H.; Lee, D.; Lai, J.; Liu, T.-J.K. Compact Nano-Electro-Mechanical Non-Volatile Memory (NEMory) for 3D Integration. In Proceedings of the 2007 IEEE International Electron Devices Meeting, Washington, DC, USA, 10–12 December 2007; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 603–606. [Google Scholar] [CrossRef]
- Roodenburg, D.; Spronck, J.W.; Van Der Zant, H.S.J.; Venstra, W.J. Buckling beam micromechanical memory with on-chip readout. Appl. Phys. Lett. 2009, 94, 183501. [Google Scholar] [CrossRef]
- Kwon, H.N.; Hwang, I.-H.; Lee, J.-H. A pulse-operating electrostatic microactuator for bi-stable latching. J. Micromech. Microeng. 2005, 15, 1511–1516. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Ilic, B.R.; Krylov, S. Two-Directional Operation of Bistable Latchable Micro Switch Actuated by a Single Electrode. Proceedings 2017, 1, 277. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Enhanced efficiency of electrostatically actuated bistable micro switches using bow-like operation. IEEE/ASME Trans. Mechatron. 2020, 1. [Google Scholar] [CrossRef]
- Kalafut, D.; Bajaj, A.; Raman, A. Tristable capacitive microcantilever switches: Measurements and simulations. Int. J. Non-Linear Mech. 2020, 119, 103304. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Symmetry breaking in an initially curved micro beam loaded by a distributed electrostatic force. Int. J. Solids Struct. 2012, 49, 1864–1876. [Google Scholar] [CrossRef]
- Das, K.; Batra, R.C. Symmetry breaking, snap-through and pull-in instabilities under dynamic loading of microelectromechanical shallow arches. Smart Mater. Struct. 2009, 18, 115008. [Google Scholar] [CrossRef]
- Kang, S.; Kim, H.C.; Chun, K. Single pole four throw RF MEMS switch with double stop comb drive. In Proceedings of the 2008 IEEE 21st International Conference on Micro Electro Mechanical Systems, Wuhan, China, 13–17 January 2008; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 1036–1039. [Google Scholar]
- Han, N.; Shinshi, T.; Azuma, N.; Kadota, S. An in-plane, large-stroke, multipole electromagnetic microactuator realized by guideways stacking mechanism. Sens. Actuators A Phys. 2019, 298, 11563. [Google Scholar] [CrossRef]
- Zhang, Y.-H.; Ding, G.; Shun, X.; Gu, D.; Cai, B.; Lai, Z. Preparing of a high speed bistable electromagnetic RF MEMS switch. Sens. Actuators A Phys. 2007, 134, 532–537. [Google Scholar] [CrossRef]
- Miao, X.; Dai, X.; Wang, P.; Ding, G.; Zhao, X. Design, fabrication and characterization of a bistable electromagnetic microrelay with large displacement. Microelectron. J. 2011, 42, 992–998. [Google Scholar] [CrossRef]
- York, P.; Jafferis, N.; Wood, R. Millimeter-sized piezoelectric flextensional actuators with improved mechanical efficiency. Sens. Actuators A Phys. 2020, 311, 112066. [Google Scholar] [CrossRef]
- Nakatani, T.; Katsuki, T.; Okuda, H.; Toyoda, O.; Ueda, S.; Nakazawa, F. Piezoelectric reliable RF-MEMS switch with narrow contact-gap using wafer-bond packaging. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2013; pp. 1–3. [Google Scholar] [CrossRef]
- Dorfmeister, M.; Kössl, B.; Schneider, M.; Schmid, U. A Novel Bi-Stable MEMS Membrane Concept Based on a Piezoelectric Thin Film Actuator for Integrated Switching. Proceedings 2019, 2, 912. [Google Scholar] [CrossRef]
- Tian, Y.; Ma, Y.; Wang, F.; Lu, K.; Zhang, D. A novel XYZ micro/nano positioner with an amplifier based on L-shape levers and half-bridge structure. Sens. Actuators A Phys. 2020, 302. [Google Scholar] [CrossRef]
- Dorfmeister, M.; Schneider, M.; Schmid, U. 3D characterisation of piezoelectric bistable MEMS membranes during switching. Sens. Actuators A Phys. 2019, 298, 111576. [Google Scholar] [CrossRef]
- Yang, C.; Liu, S.; Xie, X.; Livermore, C. Compact, planar, translational piezoelectric bimorph actuator with Archimedes’ spiral actuating tethers. J. Micromech. Microeng. 2016, 26, 124005. [Google Scholar] [CrossRef]
- Shirasu, K.; Yamamoto, G.; Inoue, Y.; Ogasawara, T.; Shimamura, Y.; Hashida, T. Development of large-movements and high-force electrothermal bimorph actuators based on aligned carbon nanotube reinforced epoxy composites. Sens. Actuators A Phys. 2017, 267, 455–463. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Dagalakis, N.G.; Gupta, S.K. Creating large out-of-plane displacement electrothermal motion stage by incorporating beams with step features. J. Micromech. Microeng. 2013, 23, 55008. [Google Scholar] [CrossRef]
- Hu, T.; Fang, K.; Zhang, Z.; Jiang, X.; Zhao, Y.-L. Design and research on large displacement bidirectional MEMS stage with interlock mechanism. Sens. Actuators A Phys. 2018, 283, 26–33. [Google Scholar] [CrossRef]
- Hsieh, J.-C.; Lin, D.T.W.; Suen, M.-S. The design of high strength electro-thermal micro-actuator based on the genetic algorithm. Microsyst. Technol. 2019, 26, 1113–1119. [Google Scholar] [CrossRef]
- Dellaert, D.; Doutreloigne, J. A thermally-actuated latching MEMS switch matrix and driver chip for an automated distribution frame. Mechatronics 2016, 40, 287–292. [Google Scholar] [CrossRef]
- Pirmoradi, E.; Mirzajani, H.; Ghavifekr, H.B. Design and simulation of a novel electro-thermally actuated lateral RF MEMS latching switch for low power applications. Microsyst. Technol. 2014, 21, 465–475. [Google Scholar] [CrossRef]
- Oh, C.; Stovall, C.B.; Dhaouadi, W.; Carpick, R.W.; De Boer, M.P. The strong effect on MEMS switch reliability of film deposition conditions and electrode geometry. Microelectron. Reliab. 2019, 98, 131–143. [Google Scholar] [CrossRef]
- Mehta, K.; Bansal, D.; Bajpai, A.; Kumar, P.; Kumar, A.; Rangra, K. Improved isolation RF MEMS switch with post release ashing. Microsyst. Technol. 2018, 24, 3863–3866. [Google Scholar] [CrossRef]
- Cho, I.-J.; Song, T.; Baek, S.-H.; Yoon, E. A low-voltage and low-power RF MEMS series and shunt switches actuated by combination of electromagnetic and electrostatic forces. IEEE Trans. Microw. Theory Tech. 2005, 53, 2450–2457. [Google Scholar] [CrossRef]
- Chae, U.; Yu, H.; Lee, C.; Cho, I. A Hybrid RF MEMS Switch Actuated by the Combination of Bidirectional Thermal Actuations and Electrostatic Holding. IEEE Trans. Microw. Theory Tech. 2020. [Google Scholar] [CrossRef]
- Lee, C.-I.; Ko, C.-H.; Huang, T.-C. Design of Multi-actuation RF MEMS Switch Using CMOS Process. In Proceedings of the 2008 3rd International Microsystems, Packaging, Assembly & Circuits Technology Conference, Taipei, Taiwan, 22–24 October 2008; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2008; pp. 141–144. [Google Scholar]
- Robert, P.; Saias, D.; Billard, C.; Boret, S.; Sillon, N.; Maeder-Pachurka, C.; Charvet, P.; Bouche, G.; Ancey, P.; Berruyer, P. Integrated RF-MEMS switch based on a combination of thermal and electrostatic actuation. In Proceedings of the TRANSDUCERS ’03: 12th International Conference on Solid-State Sensors, Actuators and Microsystems; Digest of Technical Papers (Cat. No.03TH8664), Boston, MA, USA, 8–12 June 2003; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2004. [Google Scholar]
- Ikehashi, T.; Ohguro, T.; Ogawa, E.; Yamazaki, H.; Kojima, K.; Matsuo, M.; Ishimaru, K.; Ishiuchi, H. A Robust RF MEMS Variable Capacitor with Piezoelectric and Electrostatic Actuation. In Proceedings of the 2006 IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 11–16 June 2006; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2006; pp. 39–42. [Google Scholar] [CrossRef]
- Cho, I.-J.; Yoon, E. Design and fabrication of a single membrane push-pull SPDT RF MEMS switch operated by electromagnetic actuation and electrostatic hold. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]
- Plander, I.; Štepanovský, M. MEMS technology in optical switching. In Proceedings of the 2017 IEEE 14th International Scientific Conference on Informatics, Poprad, Slovakia, 14–16 November 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 299–305. [Google Scholar]
- Plander, I.; Stepanovsky, M. MEMS optical switch: Switching time reduction. Open Comput. Sci. 2016, 6. [Google Scholar] [CrossRef]
- Sun, D.; Dong, W.; Wang, G.; Liu, C.; Yan, X.; Xu, B.; Chen, W. Study of a 2 × 2 MOEMS optical switch with electrostatic actuating. Sens. Actuators A-Phys. 2005, 120, 249–256. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; McCormick, D.; Tien, N. A Low-Voltage Lateral MEMS Switch with High RF Performance. J. Microelectromech. Syst. 2004, 13, 902–911. [Google Scholar] [CrossRef]
- Patel, C.D.; Rebeiz, G.M. An RF-MEMS switch with mN contact forces. In Proceedings of the 2010 IEEE MTT-S International Microwave Symposium, Anaheim, CA, USA, 23–28 May 2010; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2010. [Google Scholar]
- Patel, C.D.; Rebeiz, G.M. A High-Reliability High-Linearity High-Power RF MEMS Metal-Contact Switch for DC–40-GHz Applications. IEEE Trans. Microw. Theory Tech. 2012, 60, 3096–3112. [Google Scholar] [CrossRef]
- Song, Y.-H.; Han, C.-H.; Kim, M.-W.; Lee, J.O.; Yoon, J.-B. An Electrostatically Actuated Stacked-Electrode MEMS Relay with a Levering and Torsional Spring for Power Applications. J. Microelectromech. Syst. 2012, 21, 1209–1217. [Google Scholar] [CrossRef]
- A Czaplewski, D.; Nordquist, C.D.; Dyck, C.W.; A Patrizi, G.; Kraus, G.M.; Cowan, W.D. Lifetime limitations of ohmic, contacting RF MEMS switches with Au, Pt and Ir contact materials due to accumulation of ‘friction polymer’ on the contacts. J. Micromech. Microeng. 2012, 22, 105005. [Google Scholar] [CrossRef]
- Czaplewski, D.A.; Nordquist, C.D.; Patrizi, G.A.; Kraus, G.M.; Cowan, W.D. RF MEMS Switches with—Contacts Cycled to 10 Billion Cycles. J. Microelectromech. Syst. 2013, 22, 655–661. [Google Scholar] [CrossRef]
- Zhou, Z.; Nie, W.; Xi, Z.; Wang, X. A High-Electrical-Reliability MEMS Inertial Switch Based on Latching Mechanism and Debounce Circuit. IEEE Sens. J. 2015, 16, 1918–1925. [Google Scholar] [CrossRef]
- Angira, M.; Rangra, K. A novel design for low insertion loss, multi-band RF-MEMS switch with low pull-in voltage. Eng. Sci. Technol. Int. J. 2016, 19, 171–177. [Google Scholar] [CrossRef]
- Liu, Y.; Bey, Y.; Liu, X. High-Power High-Isolation RF-MEMS Switches with Enhanced Hot-Switching Reliability Using a Shunt Protection Technique. IEEE Trans. Microw. Theory Tech. 2017, 65, 3188–3199. [Google Scholar] [CrossRef]
- Shekhar, S.; Vinoy, K.J.; Ananthasuresh, G.K.; Anathasuresh, G.K. Low-voltage high-reliability MEMS switch for millimeter wave 5G applications. J. Micromech. Microeng. 2018, 28, 075012. [Google Scholar] [CrossRef]
- Krakover, N.; Maimon, R.; Tepper-Faran, T.; Yitzhak, N.; Krylov, S. Reliability of an 1000 G Range Vertically Integrated Silicon on Insulator (SOI) Impact Switch. In Proceedings of the 2020 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Hiroshima, Japan, 23–26 March 2020; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2020; pp. 1–3. [Google Scholar]
- Li, H.; Ruan, Y.; You, Z.; Song, Z. Design and Fabrication of a Novel MEMS Relay with Low Actuation Voltage. Micromachines 2020, 11, 171. [Google Scholar] [CrossRef]
- Bale, A.S.; Reddy, S.V.; Huddar, S.A. Electromechanical Characterization of Nitinol Based RF MEMS Switch; Elsevier BV: Amsterdam, The Netherlands, 2020; Volume 27, pp. 443–445. [Google Scholar]
- Seo, M.-H.; Jo, E.; Ko, S.-D.; Choi, J.; Yoon, Y.-H.; Kwon, D.-S.; Kim, J.; Yoon, J.-B. Carbon nanotubes network contact lubrication for highly reliable MEMS switch. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017. [Google Scholar]
- Uvarov, I.V.; Marukhin, N.V.; Naumov, V. Contact resistance and lifecycle of a single- and multiple-contact MEMS switch. Microsyst. Technol. 2019, 25, 4135–4141. [Google Scholar] [CrossRef]
- Iannotti, J.A.; Fiveland, F.E.; Platt, W.C. Optically Controlled MEMS Switch and Method of Using the Same. U.S. Patent 9676613, 13 June 2017. [Google Scholar]
- Gong, Z.; Zhang, Y.; Guo, X.; Liu, Z. Wafer-Level Packaging Method for RF MEMS Applications Using Pre-Patterned BCB Polymer. Micromachines 2018, 9, 93. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Failure Mode | Failure Factors | Improvement Methods |
|---|---|---|
| Creep | Temperature, power, interior stress | Creep resistant alloy; improving heat dissipation; |
| Stiction | Humidity, adhesion force, power | Reducing contact area; choosing harder contact materials; reducing the power |
| Dielectric charging | Electric field intensity, temperature, humidity | Lower actuation voltage; signal isolation; changing the dielectric |
| Fracture | Repeated loading, shock | Reducing stress; change the composition of alloys; shock absorption |
| Wear | Repeated contact | Increasing the hardness of the contact material |
| Layered | Temperature change, residual stress, microparticles | Improving temperature stability; transition layer to increase adhesion |
| Failure of package | Temperature change, impact | Shock absorption; heat dissipation |
| Mechanism | Inertial | Electro-Static | Electro-Magnetic | Piezo-Electric | Electro-Thermal |
|---|---|---|---|---|---|
| Size (μm) | ~ | ||||
| Fabrication process | Simple | Simple | Complex | Complex | Medium |
| Actuation voltage (V) | / | 20–200 | <10 | 3–20 | <15 |
| Power consumption (mW) | NZ 1 | NZ | 100–200 | NZ | 60–250 |
| Switch speed (μs) | 300–1000 | <200 | 20–1000 | 10–300 | 300–10,000 |
| The output force (μN) | Uncertain 2 | 50–1000 | 50–200 | 50–800 | 500–4000 |
| Durability | > | ~ | ~ |
| Authors [Ref] (year) | Driving Principle | Contact Form | Processing Technology | Stroke (μm) | Contact Force (μN)/Acceleration | Contact Resistance (Ω) | Size (μm²) | Driving Voltage (V) | Power Consumption (μJ/mW) | Switching Time (OFF–ON) (μs) | Reliability (Cycles) | Application |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Park, J. [10] (2001) | Electrostatic | Capacitive | Metal surface micro-machining | _ | / | / | >400 × 400 | 8 | 0 | / | / | RF MEMS |
| Robert, P. [147] (2003) | Thermal + electrostatic | Contact | _ | _ | _ | _ | 400 × 50 | 10 | 8 | 200 | > | RF MEMS |
| Wang, Y. [152] 2004 | Electrothermal | Contact | Silicon surface-micromachining | _ | 725.7 | _ | 300 × 100 | 3 | 60–100 | 300 | Microrelay | |
| Almeida, L. [39] (2007) | Electrostatic | Contact | Metal-MUMPs | 10 | _ | 0.95–1.9 | 3000 × 3000 | 172–220 | _ | _ | RF MEMS | |
| Zhang, Y.H. [127] (2007) | Electromagnetic | Contact | Non-silicon surface micro-machining | 17 | _ | _ | 2000 × 2200 | _ | 20 | _ | _ | |
| Mahameed [11] (2008) | Piezoelectric | Contact | Non-silicon surface micro-machining | _ | 0–32 | 5.4 | 200 × 200 | 5–20 | _ | 1–2 | _ | RF MEMS |
| Park, J. [129] 2009 | Electrostatic | Non-contact | SOI bulk micromachining | _ | 25 | _ | 4000 × 5000 | 25.00 | _ | 300 | RF MEMS | |
| Patel, C.D. [153] (2010) | Electrostatic | Contact (Au-Ru) | Silicon surface-micromachining | 0.85 | 800–1800 | 1.5 | 155 × 130 | 75–90 | _ | 6 | _ | RF MEMS |
| Cho [143] (2010) | Electromagnetic + electrostatic | Contact | Non-silicon surface micro-machining | _ | 46.2 | 0.42 | 400 × 250 | <4.3 | 15.4 μJ | 447 | 1.66 | RF MEMS |
| Miao [128] (2011) | Electromagnetic | Contact | Non-silicon surface micro-machining | 380 | _ | _ | 6000 × 6000 | 5 | 25 mJ | 4960 | _ | Communication facilities |
| Patel, C.D. [154] (2012) | Electrostatic | Contact | All-metal surface micromachining | 0.55 | 1200–1500 | 1–2 | 250 × 250 | 100 | _ | 5.5 | > | RF MEMS |
| Lee [9] 2012 | Inertial | Contact | SOI bulk micromachining | 16 | 33 g | ~185 | _ | / | _ | _ | >5.7 | Commercial applications e.g., geriatric health care system |
| Song [155] (2012) | Electrostatic | Contact | Silicon surface-micromachining | 12.5 | _ | 0.005 | _ | 40 | _ | 230 | 4.9 | Power-switching application |
| Czaplewski [156] (2012) | Electrostatic | Contact | Non-silicon surface micro-machining | _ | 3.5 | 140 × 150 | 80 | _ | _ | _ | ||
| Huang [6] (2013) | Inertial | Capacitive | Silicon bulk micromachining | _ | 44–263 g | / | _ | / | _ | _ | _ | Safety and arming system |
| Czaplewski [157] 2013 | Electrostatic | Contact (RuO2–Au) | Non-silicon surface micro-machining | 3 | 35 | <4 | 228 × 85 | 120 | _ | _ | RF MEMS | |
| Zhanwen, X. [4] (2014) | Inertial | Contact | Non-silicon surface micro-machining | 8–40 | 350 g–500 g | _ | 2800 × 2800 | / | _ | _ | _ | Military weapons and industrial applications |
| Gerson, Y. [74] (2014) | Inertial | Contact | Silicon bulk micromachining | ~300 g | 1.7–2.6 | 2600 × 2600 | / | _ | <120 | _ | - | |
| Nakatani, T. [130] (2014) | Piezoelectric | Contact | SOI bulk micromachining | 0.5 | 1000 | 1600 × 1100 | 20 | _ | _ | - | ||
| Xu, Y. [15] (2015) | Electrostatic | Capacitive | Silicon surface-micromachining | 1 | / | / | 320 × 120 | 14 | _ | _ | _ | Frequency reconfigurable antenna application |
| BakriKassem, M. [42] (2015) | Electrothermal | Contact | Metal-MUMPs | 32 | 3200 | 2.4 | 2000 × 1100 | 12 | 250 mW | 14,000 | _ | Latching RF MEMS |
| Pirmoradi, E. [140] (2015) | Electrothermal | Contact | Silicon surface-micromachining | >5 | _ | _ | _ | 6 | 98.78 mW | 700 | _ | RF tuning and switching applications |
| Zhou [158] (2015) | Inertial | Contact | Metal surface micro-machining | 110 | _ | _ | _ | _ | _ | _ | _ | _ |
| Zhang, Q. [75] 2016 | Inertial | Contact | Non-silicon surface micro-machining | 20 | 150–350 g | 2.35 | _ | / | _ | 300–600 | _ | Remote detection of vibration shock |
| Angira, M. [159] (2016) | Electrostatic | Capacitive | Silicon surface-micromachining | 2 | / | / | 310 × 90 | 6 | _ | _ | _ | RF MEMS |
| Lee, Y. [90] (2016) | Inertial | Contact | Silicon surface-micromachining | 9 | 43.7 g | / | 1800 × 3200 | / | _ | _ | _ | Airbags, parachutes, military devices, etc. |
| Khadeijeh K [109] (2016) | Electrostatic | Contact | Silicon surface-micromachining | 0.8 | 20,000 | 0.0018 | 120 × 60 | 6.27 | _ | _ | _ | RF MEMS |
| Dellaert, D. [139] (2016) | Electrothermal | Contact | Metal-MUMPs | 41–71 | _ | _ | 2000 × 2000 | 20–24 | _ | _ | _ | Automated distribution frame |
| Xu [83] (2017) | Inertial | Contact | Non-silicon surface micro-machining | _ | >10,000 g | 9.09 | _ | / | _ | <1000 | _ | Shock vibration monitoring sensor for IoT |
| Tomoaki Kageyama [27] (2017) | Electrostatic | Contact (Au-Au/CNTs) | Silicon surface-micromachining | _ | _ | _ | _ | 90 | _ | _ | 9100 | RF MEMS |
| Joshitha, C. [28] (2017) | Electrothermal | Contact | SOI bulk micromachining | 20.7 | 157 | _ | 200 × 200 | 14 | _ | _ | _ | _ |
| Kashani Ilkhechi, A. [37] (2017) | Electrostatic | Contact | Metal-MUMPs | 3.7 | 107 | _ | _ | 50 | _ | 79 | _ | Antenna switch applications |
| Liu [160] (2017) | Electrostatic | Contact | Silicon surface-micromachining | _ | / | 5 | 400 × 300 | _ | 30.4 | RF MEMS | ||
| Lee, H.N. [85] (2017) | Inertial | Contact | Non-silicon surface micro-machining | 6.21 | 10 g | _ | _ | _ | _ | _ | _ | Military applications |
| Zolfaghari [13] (2018) | Electrothermal | Contact | Metal-MUMPs | 12–32 | 950 | 0.028 | _ | 0.5–0.9 | 0.56mW | 500 | _ | RF MEMS |
| Du [22] (2018) | Inertial | Contact | Non-silicon surface micro-machining | >38 | 40 g | _ | 3870 × 3870 | _ | _ | _ | _ | Automotive airbags |
| Pustan, M. [45] (2018) | Electrothermal | Contact | Silicon surface-micromachining | 0.6 | _ | _ | 1200 × 1000 | _ | _ | 490 | _ | _ |
| Shekhar, S. [161] (2018) | Electrostatic | Capacitive | Non-silicon surface micro-machining | _ | / | / | _ | 4.8 | <1 mW | 33 | 5G applications | |
| Xi [21] (2019) | Inertial | Contact | Non-silicon surface micro-machining | _ | 400 g–700 g | _ | _ | / | _ | _ | _ | Direction detection |
| Desireh [32] (2019) | Electrothermal | Contact | Metal-MUMPs | 2.6 | _ | _ | _ | 11 | _ | _ | _ | Power Limiter Applications |
| Ansari [36] (2019) | Electrostatic | Capacitive | Silicon surface-micromachining | / | / | / | _ | 2.4 | _ | ~10 | _ | Communication facilities |
| Du [8] (2020) | Inertial | Contact | Metal surface micro-machining | 50 | 26 g | _ | 3850 × 3850 | / | _ | <2240 | _ | Airbag restraint system |
| Chea [144] (2020) | Electrothermal + electrostatic | Contact | Silicon surface-micromachining | 4.7 | _ | 1 | 300 × 160 | 15.4 | 3.24 μJ | 47 | 2.1 | RF MEMS |
| Krakover, N. [162] (2020) | Inertial | Contact | SOI bulk micromachining | _ | 1000 g | 1020 | _ | / | _ | 300 | _ | _ |
| H Li [163] (2020) | Electrostatic | Contact | Silicon bulk micromachining | 0.7 | _ | 0.4 | 1000 × 330 | 7.5 | 0 | 75 | 5 × | MEMS relay |
| A S Bale [164] (2020) | Electrostatic | Capacitive | _ | 2.5 | / | / | _ | 5 | _ | 35 | _ | RF MEMS |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, T.; Hu, T.; Zhao, Y. Research Status and Development Trend of MEMS Switches: A Review. Micromachines 2020, 11, 694. https://doi.org/10.3390/mi11070694
Cao T, Hu T, Zhao Y. Research Status and Development Trend of MEMS Switches: A Review. Micromachines. 2020; 11(7):694. https://doi.org/10.3390/mi11070694
Chicago/Turabian StyleCao, Tongtong, Tengjiang Hu, and Yulong Zhao. 2020. "Research Status and Development Trend of MEMS Switches: A Review" Micromachines 11, no. 7: 694. https://doi.org/10.3390/mi11070694
APA StyleCao, T., Hu, T., & Zhao, Y. (2020). Research Status and Development Trend of MEMS Switches: A Review. Micromachines, 11(7), 694. https://doi.org/10.3390/mi11070694