Optimal Control of Colloidal Trajectories in Inertial Microfluidics Using the Saffman Effect


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theory—Inertial Microfluidics
2.1. Lift Force
2.2. Saffman Effect
3. Methods
3.1. Setup
3.2. Profiles for Lift Forces and Friction Coefficients
3.3. Dynamical System and Optimal Control
4. Results and Discussion
4.1. Steering with Constant Axial Control Forces
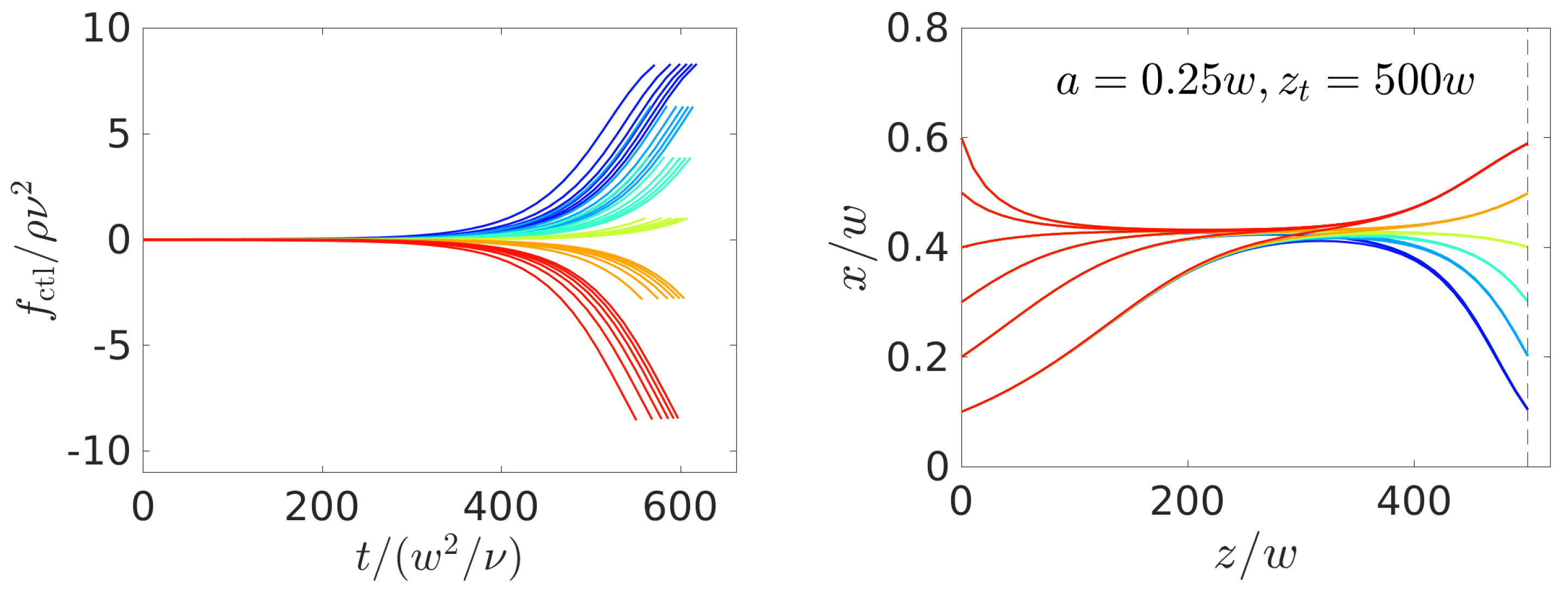
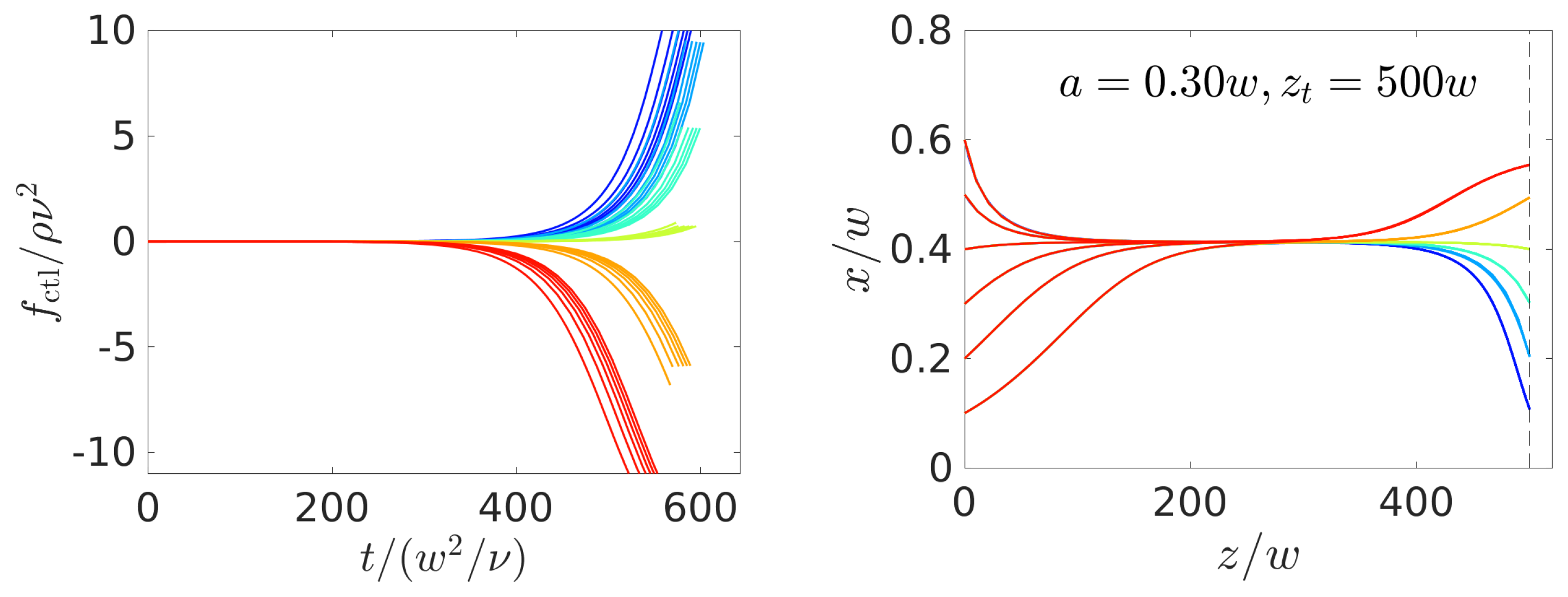
4.2. Optimal Control of Single Colloids
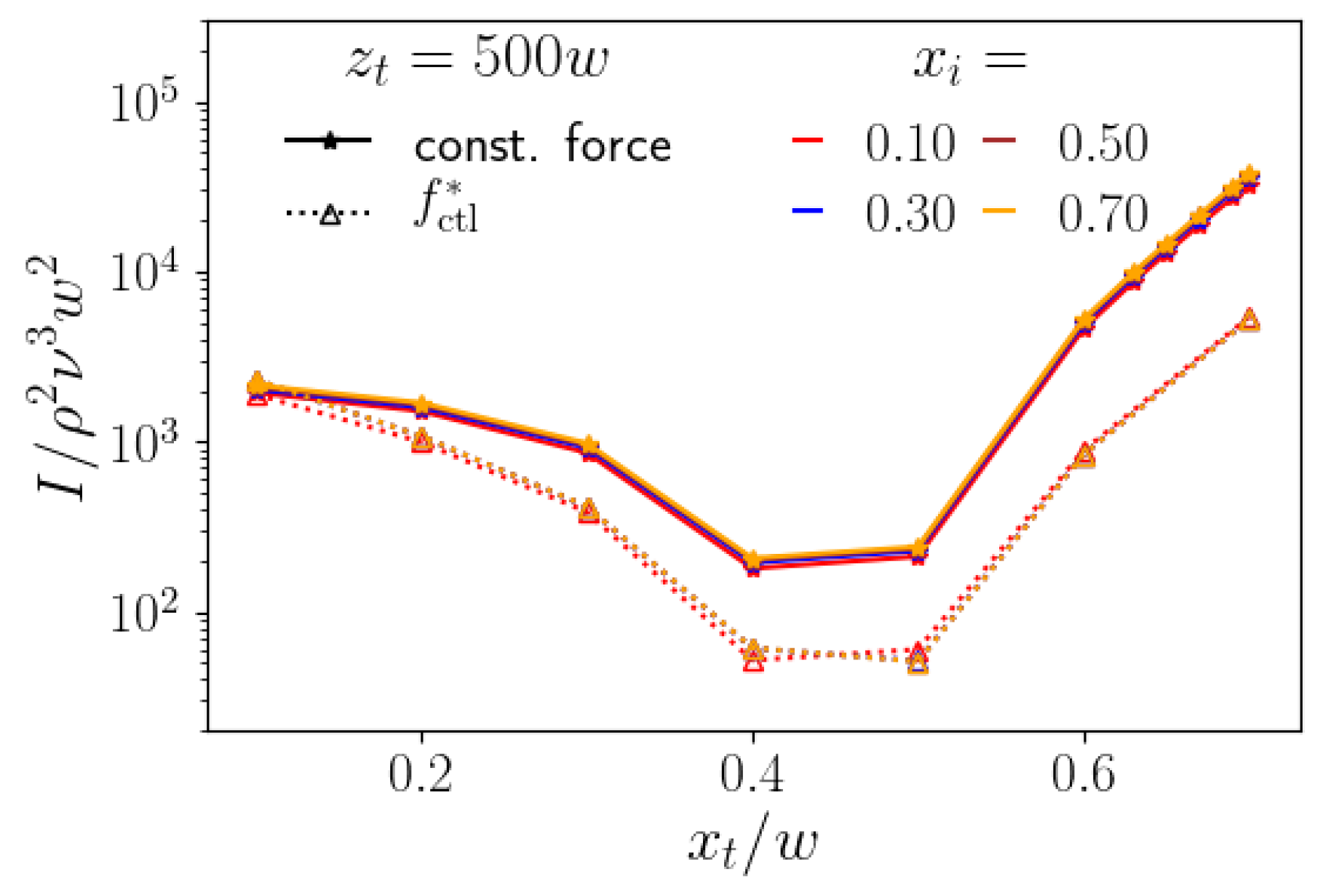
4.2.1. Comparison with Constant-Force Strategy
4.2.2. Dependence on Particle Size
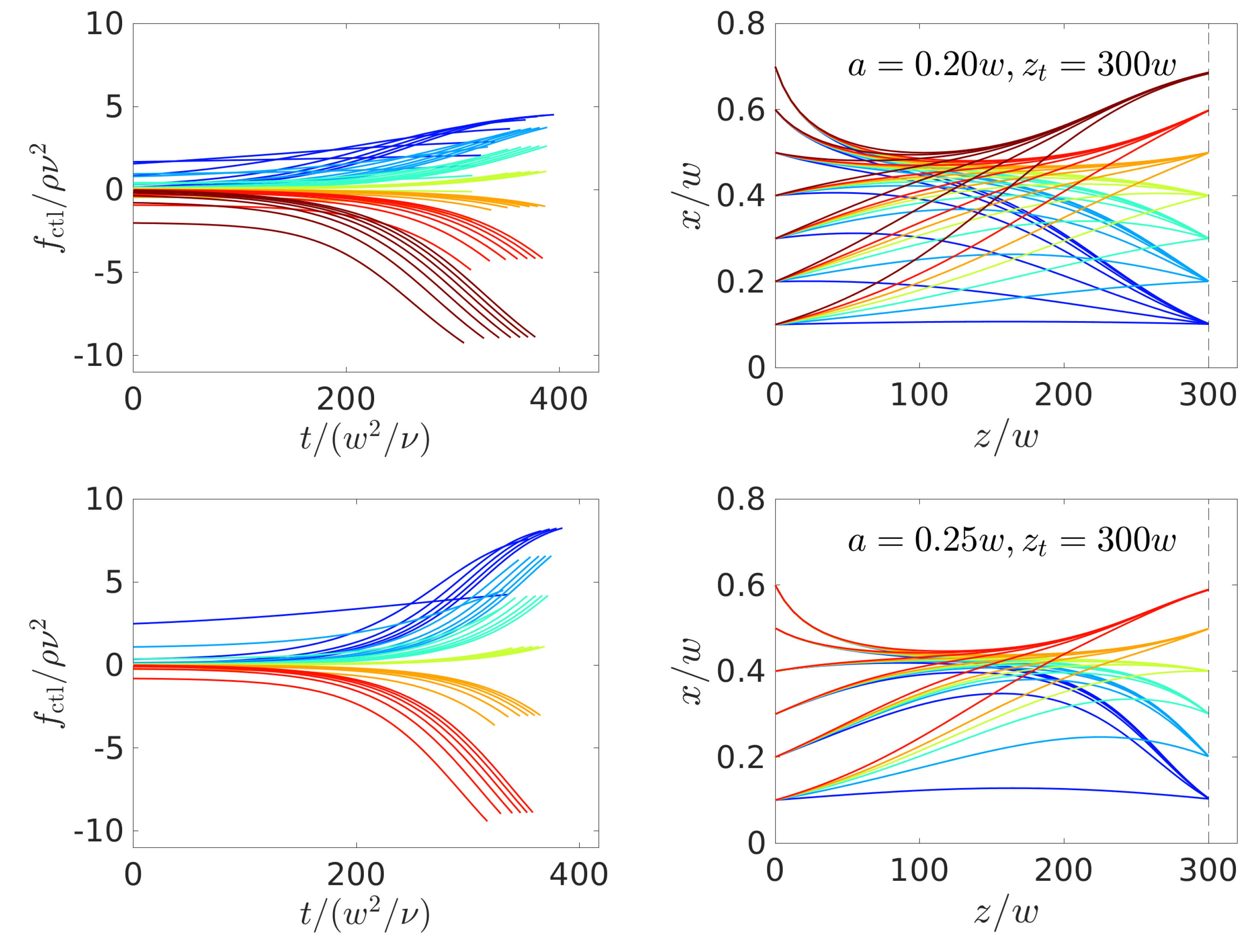
4.2.3. Dependence on Channel Length
4.3. Controlled Steering of Multiple Colloids
4.3.1. Steering a Pulse of Colloids
4.3.2. Separation of Particles
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Squires, T.M.; Quake, S.R. Microfluidics: Fluid physics at the nanoliter scale. Rev. Mod. Phys. 2005, 77, 977. [Google Scholar] [CrossRef]
- Ismagilov, R.F.; Ng, J.M.; Kenis, P.J.; Whitesides, G.M. Microfluidic arrays of fluid- fluid diffusional contacts as detection elements and combinatorial tools. Anal. Chem. 2001, 73, 5207–5213. [Google Scholar] [CrossRef] [PubMed]
- Whitesides, G.M. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Weibel, D.B.; Whitesides, G.M. Applications of microfluidics in chemical biology. Curr. Opin. Chem. Biol. 2006, 10, 584–591. [Google Scholar] [CrossRef] [PubMed]
- Di Carlo, D. Inertial microfluidics. Lab Chip 2009, 9, 3038–3046. [Google Scholar] [CrossRef]
- Amini, H.; Lee, W.; Di Carlo, D. Inertial microfluidic physics. Lab Chip 2014, 14, 2739–2761. [Google Scholar] [CrossRef] [PubMed]
- Segré, G.; Silberberg, A. Radial particle displacements in Poiseuille flow of suspensions. Nature 1961, 189, 209–210. [Google Scholar] [CrossRef]
- Sudarsan, A.P.; Ugaz, V.M. Multivortex micromixing. Proc. Natl. Acad. Sci. USA 2006, 103, 7228–7233. [Google Scholar] [CrossRef]
- Bhagat, A.A.S.; Kuntaegowdanahalli, S.S.; Papautsky, I. Enhanced particle filtration in straight microchannels using shear-modulated inertial migration. Phys. Fluids 2008, 20, 101702. [Google Scholar] [CrossRef]
- Sajeesh, P.; Sen, A.K. Particle separation and sorting in microfluidic devices: A review. Microfluid. Nanofluid. 2014, 17, 1–52. [Google Scholar] [CrossRef]
- Di Carlo, D.; Edd, J.F.; Humphry, K.J.; Stone, H.A.; Toner, M. Particle segregation and dynamics in confined flows. Phys. Rev. Lett. 2009, 102, 094503. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.; Amini, H.; Stone, H.A.; Di Carlo, D. Dynamic self-assembly and control of microfluidic particle crystals. Proc. Natl. Acad. Sci. USA 2010, 107, 22413–22418. [Google Scholar] [CrossRef] [PubMed]
- Schaaf, C.; Rühle, F.; Stark, H. A flowing pair of particles in inertial microfluidics. Soft Matter 2019, 15, 1988–1998. [Google Scholar] [CrossRef] [PubMed]
- Bretherton, F.P. The motion of rigid particles in a shear flow at low Reynolds number. J. Fluid Mech. 1962, 14, 284–304. [Google Scholar] [CrossRef]
- Saffman, P. The lift on a small sphere in a slow shear flow. J. Fluid Mech. 1965, 22, 385–400. [Google Scholar] [CrossRef]
- Kim, Y.W.; Yoo, J.Y. Axisymmetric flow focusing of particles in a single microchannel. Lab Chip 2009, 9, 1043–1045. [Google Scholar] [CrossRef]
- Yuan, D.; Pan, C.; Zhang, J.; Yan, S.; Zhao, Q.; Alici, G.; Li, W. Tunable particle focusing in a straight channel with symmetric semicircle obstacle arrays using electrophoresis-modified inertial effects. Micromachines 2016, 7, 195. [Google Scholar] [CrossRef]
- Choudhary, A.; Renganathan, T.; Pushpavanam, S. Inertial migration of an electrophoretic rigid sphere in a two-dimensional Poiseuille flow. J. Fluid Mech. 2019, 874, 856–890. [Google Scholar] [CrossRef]
- Bazaz, S.R.; Mashhadian, A.; Ehsani, A.; Saha, S.C.; Krüger, T.; Warkiani, M.E. Computational inertial microfluidics: A review. Lab Chip 2020, 20, 1023–1048. [Google Scholar] [CrossRef]
- Shin, S.J.; Sung, H.J. Inertial migration of an elastic capsule in a Poiseuille flow. Phys. Rev. E 2011, 83, 046321. [Google Scholar] [CrossRef]
- Asmolov, E.S.; Dubov, A.L.; Nizkaya, T.V.; Harting, J.; Vinogradova, O.I. Inertial focusing of finite-size particles in microchannels. J. Fluid Mech. 2018, 840, 613–630. [Google Scholar] [CrossRef]
- Schaaf, C.; Stark, H. Inertial migration and axial control of deformable capsules. Soft Matter 2017, 13, 3544–3555. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; McKinley, G.H.; Ardekani, A.M. Dynamics of particle migration in channel flow of viscoelastic fluids. J. Fluid Mech. 2015, 785, 486–505. [Google Scholar] [CrossRef]
- Raoufi, M.A.; Mashhadian, A.; Niazmand, H.; Asadnia, M.; Razmjou, A.; Warkiani, M.E. Experimental and numerical study of elasto-inertial focusing in straight channels. Biomicrofluidics 2019, 13, 034103. [Google Scholar] [CrossRef] [PubMed]
- Prohm, C.; Tröltzsch, F.; Stark, H. Optimal control of particle separation in inertial microfluidics. Eur. Phys. J. E 2013, 36, 118. [Google Scholar] [CrossRef][Green Version]
- Prohm, C.; Stark, H. Feedback control of inertial microfluidics using axial control forces. Lab Chip 2014, 14, 2115–2123. [Google Scholar] [CrossRef]
- Ioffe, A.D.; Tihomirov, V. Theory of Extremal Problems; Elsevier: Amsterdam, The Netherlands, 1979. [Google Scholar]
- Asmolov, E.S. The inertial lift on a spherical particle in a plane Poiseuille flow at large channel Reynolds number. J. Fluid Mech. 1999, 381, 63–87. [Google Scholar] [CrossRef]
- Hood, K.; Lee, S.; Roper, M. Inertial migration of a rigid sphere in three-dimensional Poiseuille flow. J. Fluid Mech. 2015, 765, 452–479. [Google Scholar] [CrossRef]
- Bruus, H. Theoretical Microfluidics; Oxford University Press: Oxford, UK, 2008; Volume 18. [Google Scholar]
- Ho, B.; Leal, L. Inertial migration of rigid spheres in two-dimensional unidirectional flows. J. Fluid Mech. 1974, 65, 365–400. [Google Scholar] [CrossRef]
- Schonberg, J.A.; Hinch, E. Inertial migration of a sphere in Poiseuille flow. J. Fluid Mech. 1989, 203, 517–524. [Google Scholar] [CrossRef]
- Gossett, D.R.; Tse, H.T.K.; Dudani, J.S.; Goda, K.; Woods, T.A.; Graves, S.W.; Di Carlo, D. Inertial manipulation and transfer of microparticles across laminar fluid streams. Small 2012, 8, 2757–2764. [Google Scholar] [CrossRef] [PubMed]
- Chun, B.; Ladd, A. Inertial migration of neutrally buoyant particles in a square duct: An investigation of multiple equilibrium positions. Phys. Fluids 2006, 18, 031704. [Google Scholar] [CrossRef]
- Dünweg, B.; Ladd, A.J. Lattice Boltzmann simulations of soft matter systems. In Advanced Computer Simulation Approaches for Soft Matter Sciences III; Springer: Berlin, Germany, 2009; pp. 89–166. [Google Scholar]
- Nocedal, J.; Wright, S. Sequential Quadratic Programming. In Numerical Optimization; Springer: Berlin, Germany, 2006. [Google Scholar]
- Kim, J.A.; Lee, J.; Wu, C.; Nam, S.; Di Carlo, D.; Lee, W. Inertial focusing in non-rectangular cross-section microchannels and manipulation of accessible focusing positions. Lab Chip 2016, 16, 992–1001. [Google Scholar] [CrossRef] [PubMed]
- Korohoda, W.; Wilk, A. Cell electrophoresis—A method for cell separation and research into cell surface properties. Cell. Mol. Biol. Lett. 2008, 13, 312–326. [Google Scholar] [CrossRef] [PubMed]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rühle, F.; Schaaf, C.; Stark, H. Optimal Control of Colloidal Trajectories in Inertial Microfluidics Using the Saffman Effect. Micromachines 2020, 11, 592. https://doi.org/10.3390/mi11060592
Rühle F, Schaaf C, Stark H. Optimal Control of Colloidal Trajectories in Inertial Microfluidics Using the Saffman Effect. Micromachines. 2020; 11(6):592. https://doi.org/10.3390/mi11060592
Chicago/Turabian StyleRühle, Felix, Christian Schaaf, and Holger Stark. 2020. "Optimal Control of Colloidal Trajectories in Inertial Microfluidics Using the Saffman Effect" Micromachines 11, no. 6: 592. https://doi.org/10.3390/mi11060592
APA StyleRühle, F., Schaaf, C., & Stark, H. (2020). Optimal Control of Colloidal Trajectories in Inertial Microfluidics Using the Saffman Effect. Micromachines, 11(6), 592. https://doi.org/10.3390/mi11060592