1. Introduction
As the microfluidic field has matured in academia and industry, there is an increasing need for robust and straightforward imaging tools [
1] for live monitoring during industrial or scientific bio-processes [
2], to observe experiments in a research environment [
3], and for characterising flows during the prototyping and development of new microfluidic designs [
1]. Most microfluidic systems involve flows, for processes as diverse as mixing, separation, dropletisation, and controlled dispensing and cell delivery [
2,
3,
4,
5,
6]. Current microfluidic applications are primarily in the biochemical and biomedical areas, including the growth and support of artificial organs, “lab-on-a-chip” bio-analysis for point-of-care diagnostics, chemical and food processing, encapsulation for drug manufacture and delivery, drug discovery and medical research, as well as environmental monitoring and on-board cooling for 3D microprocessors [
3,
4,
5,
6,
7,
8].
In these applications, the measurement of flow velocities from micrometres-per-second to metres-per-second is potentially of interest [
2], with lower velocities of interest typically being associated with the requirement for the spatial resolution to be in at least two dimensions. Existing measurement techniques have limitations, such as the requirement for multiple optical access ports in stereoscopic or volumetric methods [
9] or the use of fluorescent seed particles typically required by microscope-derived techniques [
8,
10], which also tend to provide only horizontal section measurement. Doppler OCT has measured 30
/
flow velocities, but is only capable of doing so for velocity components along the beam axis [
11]. Confocal microscopy can acquire many horizontal sections to capture a volume, but the time required to do so implies maximum flow velocities of millimetres-per-second [
1]. Optical coherence tomography (OCT) has been used to measure flow at velocities of a few millimetres-per-second [
12,
13] using a single beam creating a depth-priority image. En face OCT, creating a lateral-priority image (which with dynamic focusing can be in-focus at all depths, sharing some similarities with confocal microscopy) requires
to create an image. This is too slow for most flow situations, but it may be possible to track particles in the lateral-plane only without scanning all depths using this technique in which case scan rates of 500
can be achieved [
14]. A commercial multi-beam OCT system exists [
15,
16] for en face OCT with each beam being in-focus at a different depth, which would in principle allow for faster image capture [
17].
We previously reported a novel dual beam optical coherence tomography (OCT) instrument [
18] that overcomes some of these limitations: the instrument requires only a single optical access port (in this case, above the microfluidic chip), allows simultaneous imaging of the microfluidic channel, does not require fluorescent seed particles, and can provide a depth-section velocity profile (as opposed to horizontal-section) at full millimetre depth through a microfluidic chip. This instrument uses two beams to re-image the same plane rapidly (analogous to double-exposure camera-based PIV) and hence measure high flow velocities [
19], whereas the Vivosight system [
15,
16] uses multiple beams, each focused at a different depth to improve the lateral resolution and depth of field. Our instrument has been used to make 1D velocity profiles of the flow spanwise across a straight channel with velocities of up to 1
/
. At the associated 4th Microfluidic Handling Systems conference [
20], preliminary work was presented showing the visualisation of two-dimensional microfluidic flows using this instrument.
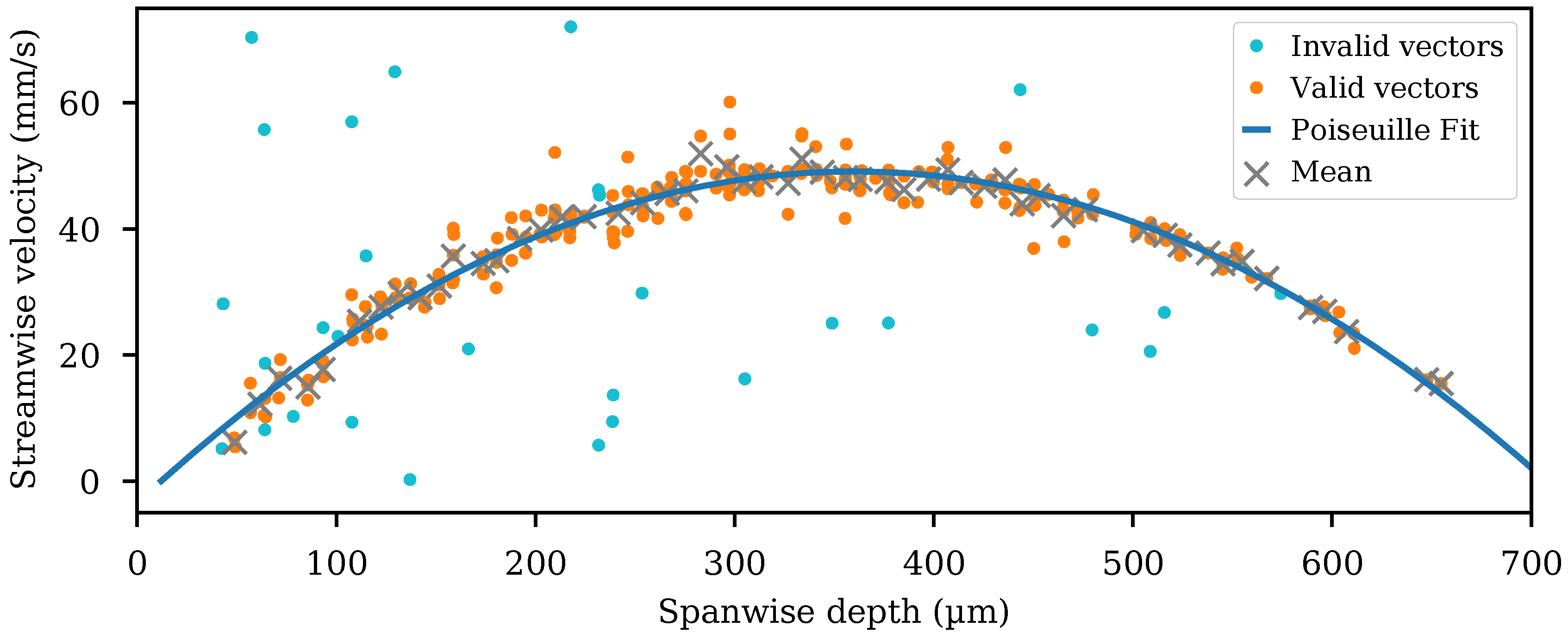
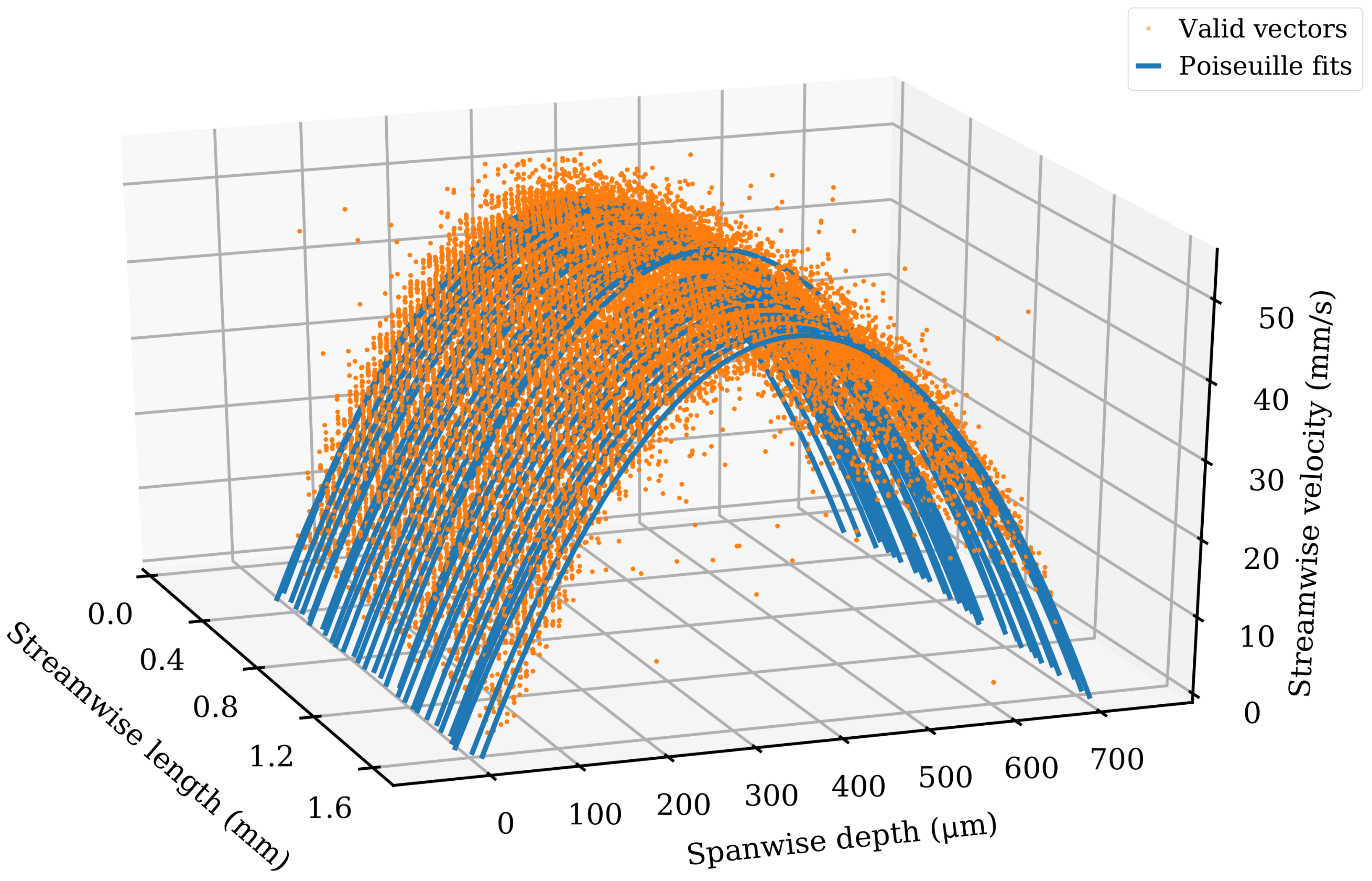
In this paper, we develop the methods and processes necessary to make 2D quantitative measurements of the flow-velocity using dual beam OCT and present exemplar results in a microfluidic chip. A 2D reference measurement of the Poiseuille flow in a trapezoidal microfluidic channel is presented over a spanwise depth range of 700 and streamwise length of 1600 with a spatial resolution of 10 , at velocities up to 50 /. The measurement of a more complex flow field is also demonstrated in a sloped microfluidic section.
2. Materials and Methods
2.1. Dual Beam Optical Coherence Tomography Instrument
The dual beam OCT instrument is shown schematically in
Figure 1 and was described in more detail in [
18]. The instrument was custom assembled from commercially available optical components, excluding the dual optical fibre end, which was manufactured in our laboratories. In this system, two parallel OCT interferometers were created using a single laser and reference arm, with the measurement arm illuminating the microfluidic chip with a small spatial separation of 180
.
The dual beams were created by coupling light from a solid-state swept-source laser (1526–1608
, 9
output power) into separate, but closely adjacent optical fibres within a custom-made dual optical fibre end as described in [
18]. This dual optical fibre end was integrated into an interferometric sensing head that addressed the microfluidic chip (at present, through its top surface). This configuration allowed the simultaneous measurement of two spatially offset depth profiles into the microfluidic chip. A beamsplitter within the sensing head used 90% of the input light for the microfluidic chip arm of the interferometer in order to balance the returning optical power, since the microfluidic chip reflected relatively little light compared to the reference arm. A galvanometer was then used to scan the beam pair through a focusing scan lens and across the chip, allowing two-dimensional depth-section images of flow in the vertical plane to be measured. The focusing scan lens created a beam waist of 20
in diameter (corresponding to lateral imaging resolution), resulting in a Rayleigh range of
(within which the beam size remained within a factor of
of its original size). The axial imaging resolution of 15
in air (or 10
in the fluid) was principally determined by the swept wavelength of the laser (1526–1608
) [
21]. These resolutions applied to the OCT images shown in
Figure 2 and
Figure 3 and not to the spatial resolution of the calculated velocity vectors determined by the particle tracking velocimetry analysis. Except in specific cases when determining the refractive index and depth to 4 significant figures [
22], dispersion effects can typically be ignored in OCT imaging.
The optics necessary for separation (and later detection) of the light were custom assembled into a portable enclosure that also served to isolate the instrument from changes in the environment. Optical circulators redirected the reflected light to two photo-detectors from which the data were acquired by a high-rate data-acquisition card (12 bit resolution, 500 MS/s) with the optical coherence tomography images reconstructed from the photo-detector signals using the control/capture PC, as detailed in [
18]. This data acquisition rate was sufficiently high that each pixel in the OCT images was approximately 3
in length.
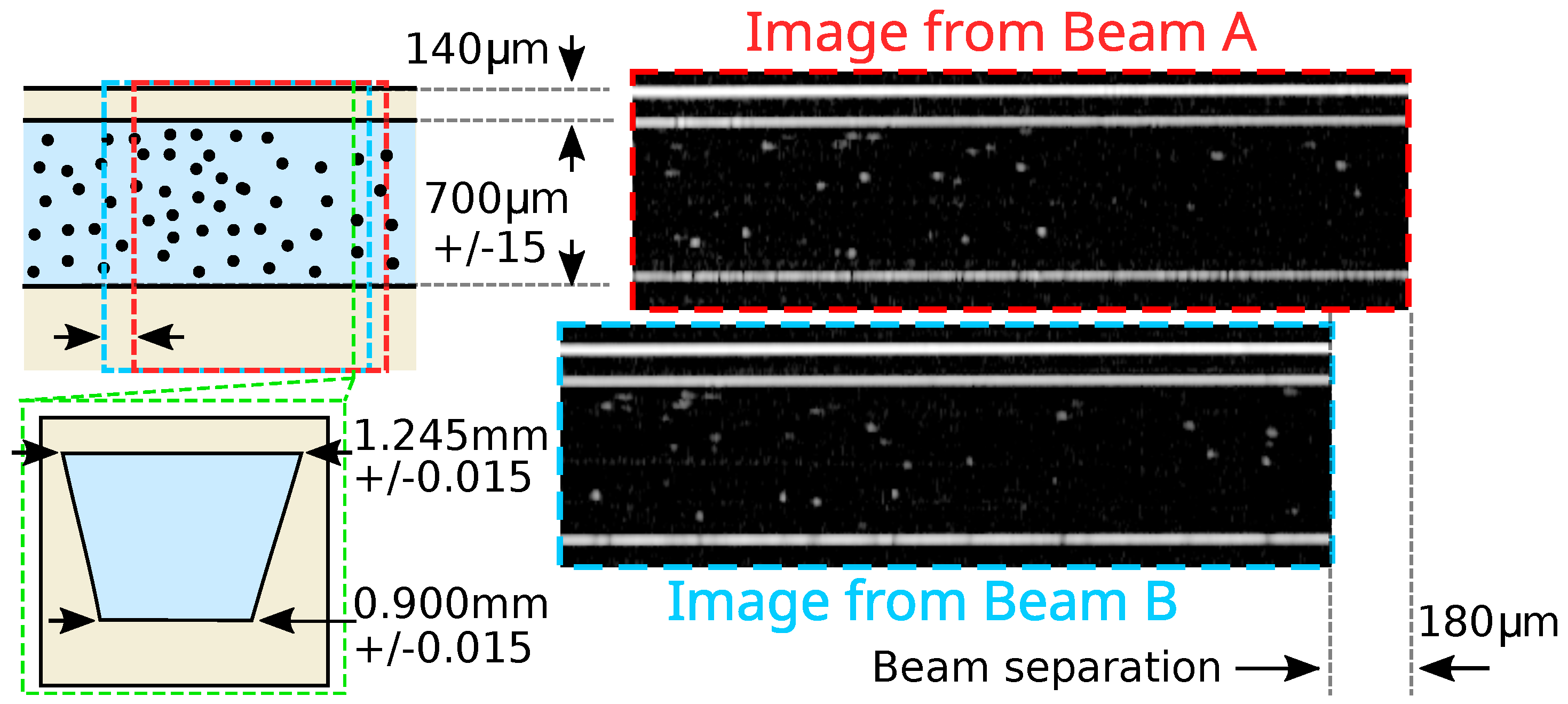
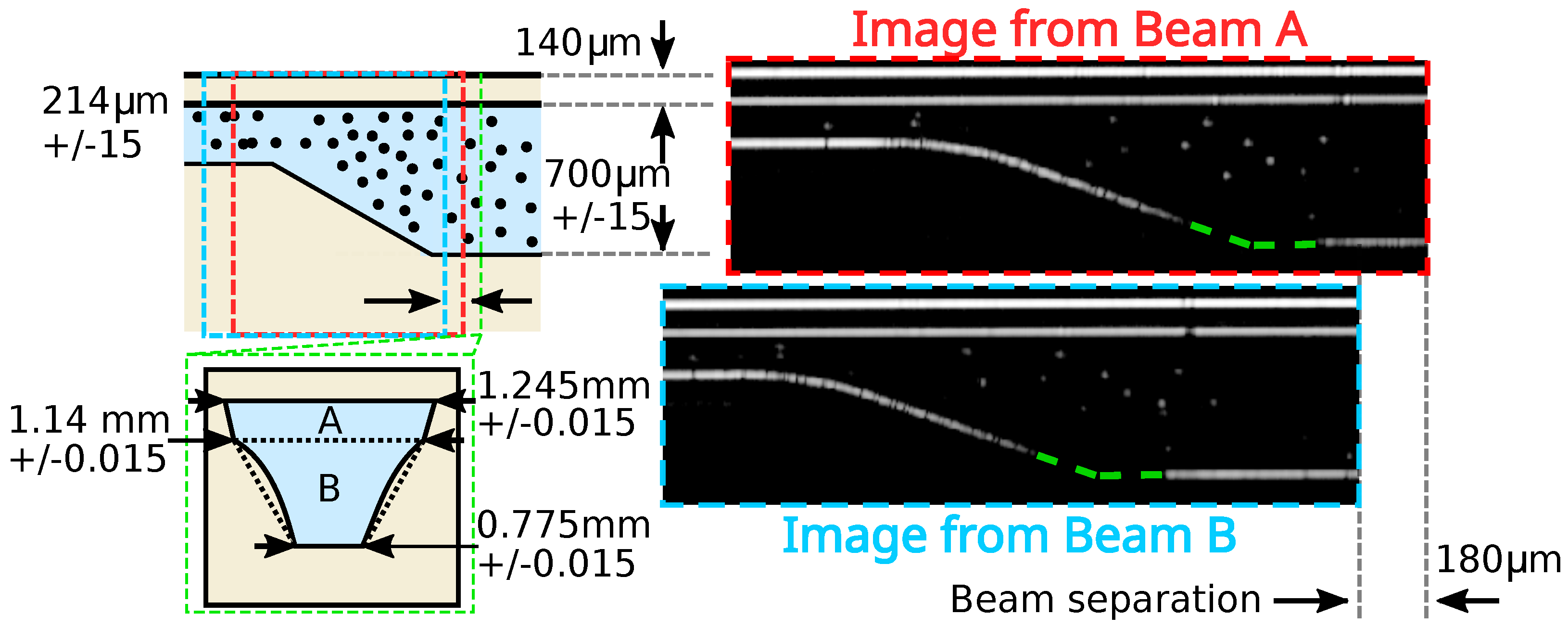
This instrument was used to measure fluid flow through straight and sloped microfluidic channel formations using only a single optical access point through the “upper” surface of the microfluidic chip. A standard reaction chamber chip (Microfluidic Chipshop Jena GmBH, Fluidic 558, Jena, Germany) contained both formations and was used as the test object. This chip was manufactured from PMMA. The sloped section rose from a (specified) full depth of 700
(measured to be accurate to ±15
) to 214
. The spanwise width narrowed from a (specified) width of
(measured to be
) at the top of the channel to
at the bottom (with additional narrowing to
around the base of the slope, possibly due to PMMA flow during the injection moulding process) [
23]. Measurements were accurate to 15
.
Flexible tubing of internal diameter was attached to a 10 mL plastic syringe driven by a Nexus 3000 (Chemyx, Stafford, TX, USA) syringe pump, with the other microfluidic chip port connected to a reservoir. A colloidal suspension of 10 diameter latex particles was prepared at a density of /mL (matched to the particles so they would remain in suspension for a prolonged period, although in practice, the particles were slightly buoyant). This particle size was chosen for the reasonable visibility of individual particles as compared to the 20 beam waist (each particle filled approximately one-fourth of the resolved volume) and sufficient oversampling of particles as compared to the 3 pixel size in the OCT images, ensuring that the particles did not appear as single pixel dots that could be confused with system noise. The 3 particles of the same type were also tested and could not be clearly imaged. It was unlikely that particles small enough to exhibit significant Brownian motion in the approximately 1 between Beam A and Beam B could be individually imaged using OCT.
2.2. OCT Imaging of Straight and Sloped Channel Sections of the Microfluidic Chip
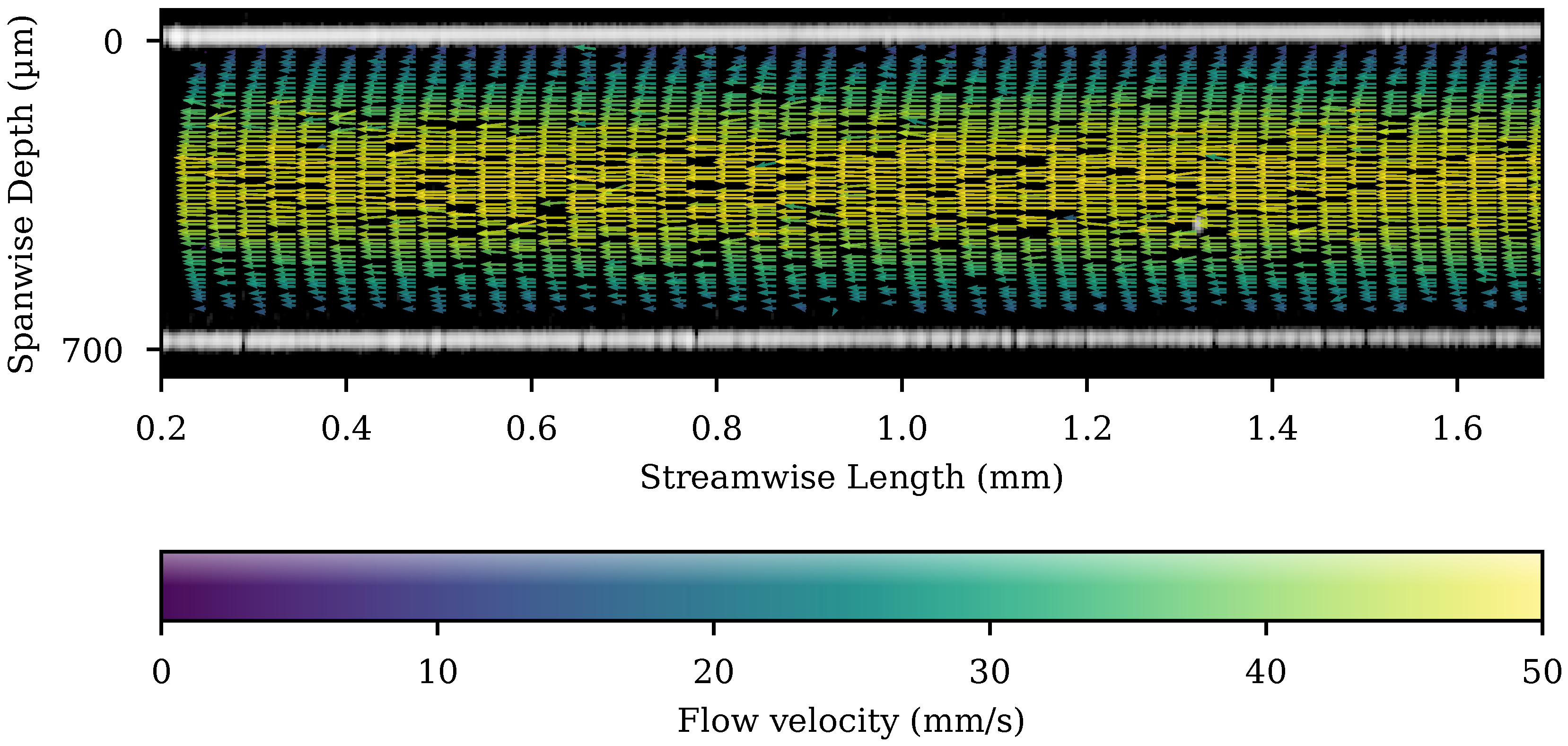
OCT images of the straight channel section of the microfluidic chip produced by interferometry are shown in
Figure 2. The interferometry occurred between the portion of reflected (or scattered) light that returned from the microfluidic chip and the light from the reference arm of the interferometer. A pair of images was produced, one for each of the dual beams, with the separation of the images determined by the spacing of the fibres in the dual optical fibre end.
The flat upper surface of the microfluidic chip, the flat upper surface of the microfluidic channel, and the flat portions of the lower surface of the microfluidic channel could clearly be seen, as they reflected light directly back to the dual optical fibre end. The spherical particles in suspension within the microfluidic channel scattered light in all directions, a sufficient portion of which returned to the dual optical fibre end to allow the particles to be imaged, and these could be seen as the bright specks within the channel.
Some particles appeared less intensely than others, likely because they lay only partially within the plane of the beam scan. Particles moving quickly across the image only interacted briefly with the beams performing the OCT scan and therefore appeared compressed. This effect could be seen in middle of the microfluidic channel (the flow at the centre of a channel was faster than near the walls) [
24]. Slightly fewer particles appeared at the bottom of the channel than at the top. This was due in part to the distance from the beam focus and partly due to absorption of the laser light by the fluid. Significant effort has been made in recent years to restore at-focus resolution across the full depth of OCT images mainly de-convolving the point-spread-function of the OCT system with the image [
25]. In principle, such techniques might also be used to restore the intensity of particles partially out of the beam-scan plane. Neither technique was applied here; instead, a particle identification approach (using widths appropriate for the point-spread-function) was used, as detailed in
Section 2.3.
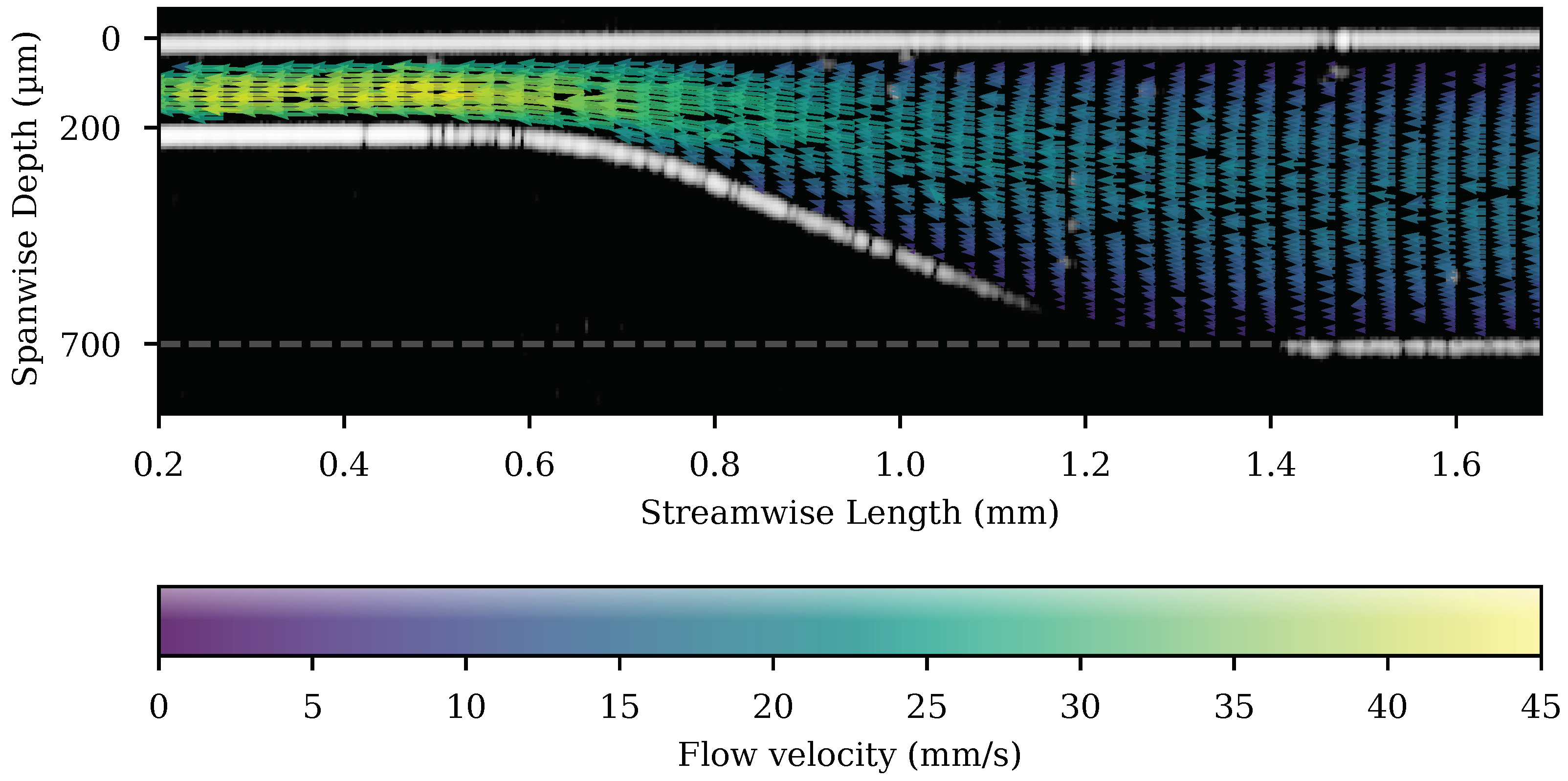
OCT images of the sloped section are shown in
Figure 3. In this case, the lower surface of the microfluidic channel incorporated a smooth sloped section that was not clearly seen because it reflected light away from the optical fibre end, and this is shown in
Figure 3 with a green dashed line.
2.3. Particle Flow Tracking
The particles were imaged and tracked in order to determine the flow velocity. The particle identification and flow tracking were performed using the open source trackpy 0.3.3 library [
26]. The area of interest was windowed to within the microfluidic channel. Insufficiently intense particles were rejected using the following method. First, the OCT images were re-scaled in brightness to maximise contrast following the method of [
27]. Then, the trackpy software searched for particles within the image, allowing a size of 5 pixels vertically by 3 pixels horizontally with a minimum separation between particles of 3 pixels. Particles had to exceed a minimum mass value of 0.4 related to the sum of their brightness in all pixels in which they appeared. Additionally, particles had to appear brighter than 74% of the image as a whole. These values were determined by trial-and-improvement testing on a sampling of images from the dataset, and the implementation can be found in the
supplementary materials.
The process of particle identification was repeated for 300 captured pairs of images corresponding to a measurement, which was a limitation of the current data acquisition system. It was not possible to use particle intensity to match particles between the images as particle brightness could change between the images, either due to misalignment between the beams or the particles shifting slightly with respect to the plane of the measurement between the beams. Therefore, the software took the identified particle positions alone for the two images and searched for a matrix of velocity vectors that connected those positions. The flow was assumed constant over the duration of the measurement, so similar velocity matrices were expected to match for all pairs of images, and this condition was imposed by the software.
A predicted velocity vector matrix anticipating parabolic Poiseuille flow streamwise [
24] along the microfluidic channel was used as a starting point for the velocity vector search (horizontally in
Figure 2 and
Figure 3) to account for the straight sections of the channel. However, the software was permitted to diverge strongly from this starting velocity vector since it was expected that the sloped section of the channel would induce flow velocity vectors with vertical components. Although it would have been possible to provide a bespoke flow predictor for the starting estimate in the flow tracking, this was not desirable as this required a degree of foreknowledge not likely to be present and an impractical degree of data analysis effort, for many realistic scenarios.
2.4. Spatial Resolution, Velocity Error, and Field-of-View
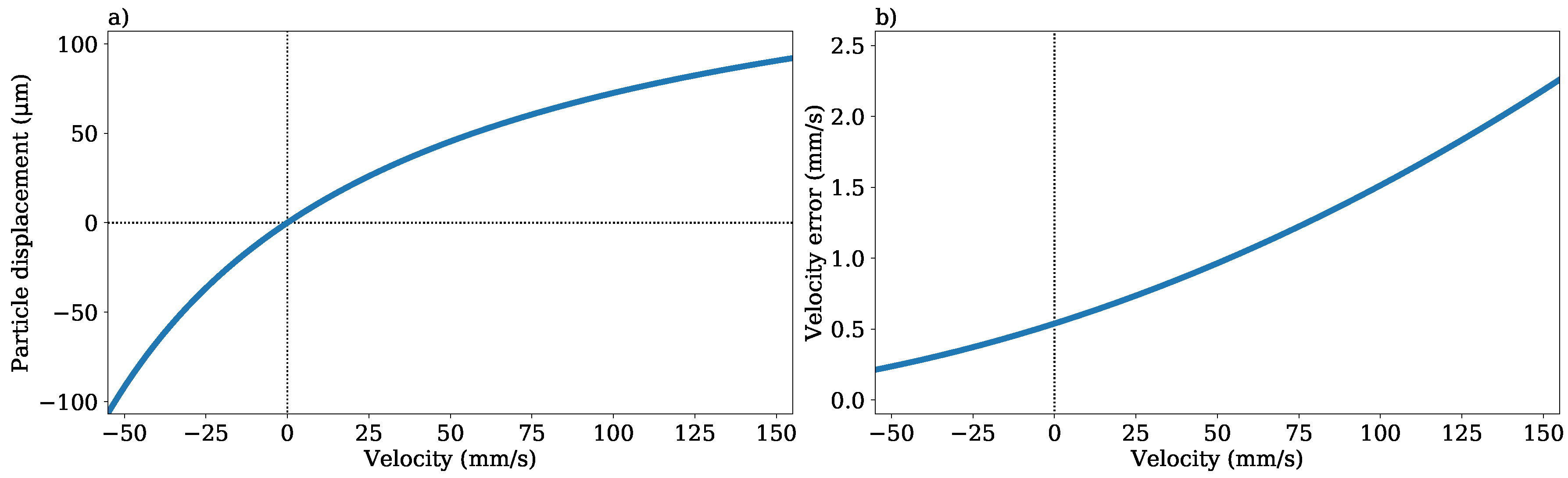
The length of the determined particle displacement vector provided a measure of the spatial resolution achievable and was dependant on the flow velocity, as shown in
Figure 4a. For example, at a particle velocity equal to the beam-scan velocity of 148
/
, the particle displacement was 90
, half the beam separation (because the moving particle had met the oncoming second beam halfway). Likewise, since the scanning dual beams and the particles were both moving and the direction of the beam scan should be chosen so as to be opposite the main direction of flow [
18], the resolution with which the magnitude of a velocity vector could be determined (the velocity error) was itself dependant on the flow velocity. Assuming an uncorrelated half-pixel error in the position determination of a particle and 100 particles per bin (with the error falling as
where
N is the number of particles [
28]), the velocity error could be plotted against the velocity in
Figure 4b. It could be seen that the error would increase non-linearly with particle velocity in the direction opposite the beam. When the particle velocity became negative, travelling in the same direction as the beam scan, the particle displacement approached infinity (a particle travelling at the same velocity as the beams would never be imaged by them) and the velocity error approached zero (a half-pixel position error divided by an infinitely long particle displacement).
Unlike traditional single beam OCT systems, there was no explicit link between the size of the image and the measurable velocities [
12,
13], because the second beam imaged the particle without having to wait for the next scan. The overlap between the images from the two beams had to be substantial, in this case a
scan with a beam separation of 180
. Given the fixed half-pixel error in particle position determination, it may be desirable to increase the scan resolution to reduce the size (in micrometres) represented by a pixel in the OCT images. This could be done either by reducing the length of the scan or increasing the number of laser wavelength sweeps in a single image (which given the fixed laser scan rate of 96
implied reducing the frame rate). The system could be configured in either way, and the appropriate settings for the measurement should be chosen. In this case, a pixel width of ≈3
was used to minimise the error, given the 20
diameter of the beam waist and the 10
size of the particles [
28].
4. Discussion and Conclusions
In a prior publication, a dual beam optical coherence tomography (OCT) instrument was shown to be capable of measuring flow velocities in excess of 1
/
[
18]. In this publication, the instrument was shown to be capable of 2D spatially-resolved flow velocity measurement by reference to Poiseuille flow in a straight channel, over a spanwise depth range of 700
and a streamwise length of 1600
, with a 10
spatial resolution of the calculated velocity vectors, at velocities up to 50
/
. We also demonstrated the system with measurements of the more complex flow field in a sloped channel geometry.
This instrument retained the advantages of OCT compared to microscope-derived imaging techniques:
requiring only a single optical access port (in this case, above the microfluidic chip),
simultaneously imaging the structure of the microfluidic channel,
without requiring fluorescent particles,
providing a depth-section velocity profile (as opposed to the horizontal-section),
at millimetre depth through a microfluidic chip.
Although a commercially available microfluidic chip was used for this work, difficulties were encountered around the deviation from specification (there was additional narrowing from a specified
to
around the base of the slope, possibly due to PMMA flow during the injection moulding process) [
23], which impacted the expected flow velocity. This emphasised the need for flow measurement even in cases where commercial microfluidic chips were utilised with known pump rates and for truly 3D flow measuring instruments to capture fully and directly the flow in such situations. Approaches to provide this capability with minimal impact on the measurable flow velocities will be explored in future work.
The high 1
/
velocity 1D measurement achieved in [
18] could not be matched in 2D. Particles had to remain within the scan plane in order to be imaged by both Beam A and Beam B, so that a velocity vector could be determined for that particle. The maximum allowable spanwise width displacement (out of the scan plane) was the beam width of ≈10
, and the time interval between the Beam A and Beam B images was ≈
for a slow-moving particle; hence, the maximum allowable spanwise width velocity was ≈9
/
. Additionally, with a well-known 1D flow profile, aggressive velocity vector filtering could be applied to recover the actual velocity [
18]. In the case of a less well-defined 2D profile, it was not possible to filter aggressively. Fifty millimetres per second represented an indication (rather than a hard limit) of the velocity order-of-magnitude that could currently be measured in 2D. A full 3D system requiring significant development of the scanning method and processing algorithm would be needed to overcome this limitation.
The spatial resolution of the calculated velocity vectors and the resolution of the magnitude of those velocity vectors depended primarily on the separation of the beams and the velocity of the beam scan. For slow moving particles, tracking could be performed using consecutive frames from Beam A (although no such analysis was included herein). This would reduce the tolerable spanwise width velocity and would potentially add considerable complexity in managing the interface between the single-beam-tracking and dual-beam-tracking regimes. In the ideal case, a series of beams would provide more complete information, but this raises considerable fibre optic and data processing difficulties. It is intended to explore adding more OCT beams in future work.
The trackpy software was the limitation in applying particle tracking to a more varied set of flow situations. In part, this was due to the mismatched delay between A-to-B images compared to B-to-A images (a feature shared with double exposure camera-based PIV [
28]) and in part because of misalignment between the dual beams, meaning particles did not necessarily appear in subsequent images. In future work, it is intended to develop bespoke software optimised to the instrument that determines flow velocity from the OCT images. Either with custom tracking software optimised for OCT images or alternatively by the use of correlation based particle imaging velocimetry techniques, the need to track individual particles will be eliminated.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







