Printed Soft Sensor with Passivation Layers for the Detection of Object Slippage by a Robotic Gripper

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
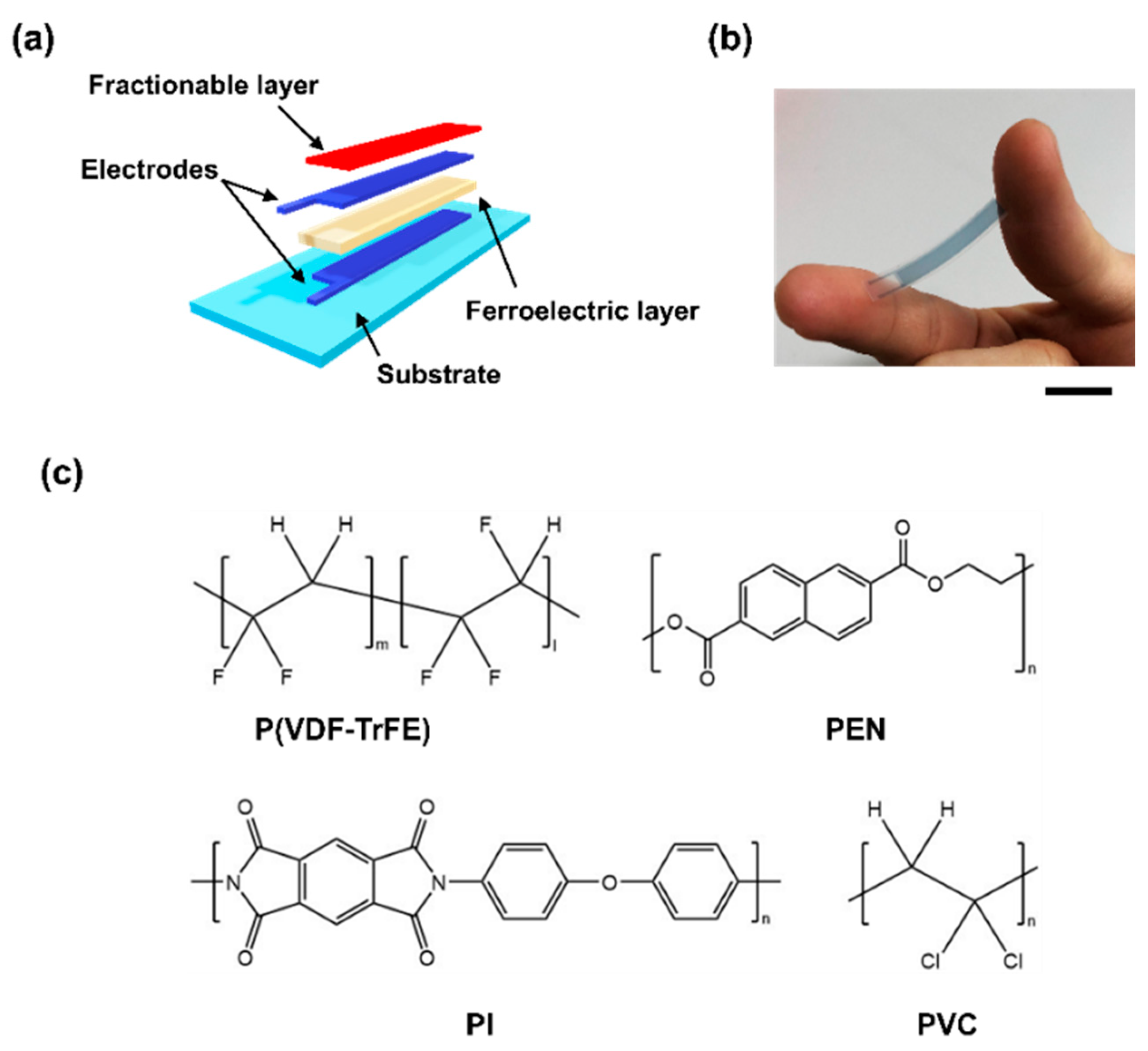
2.1. Device Fabrication
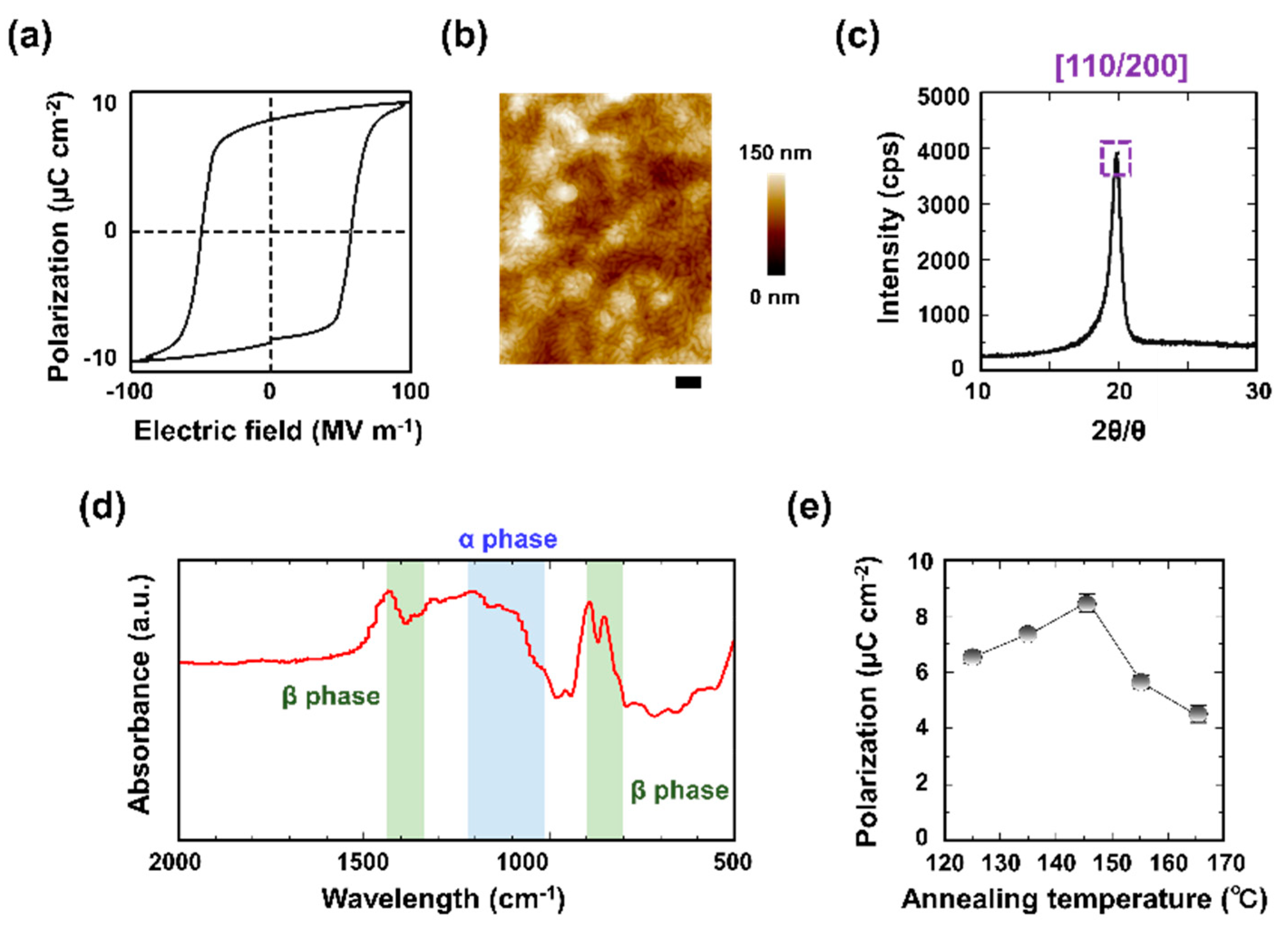
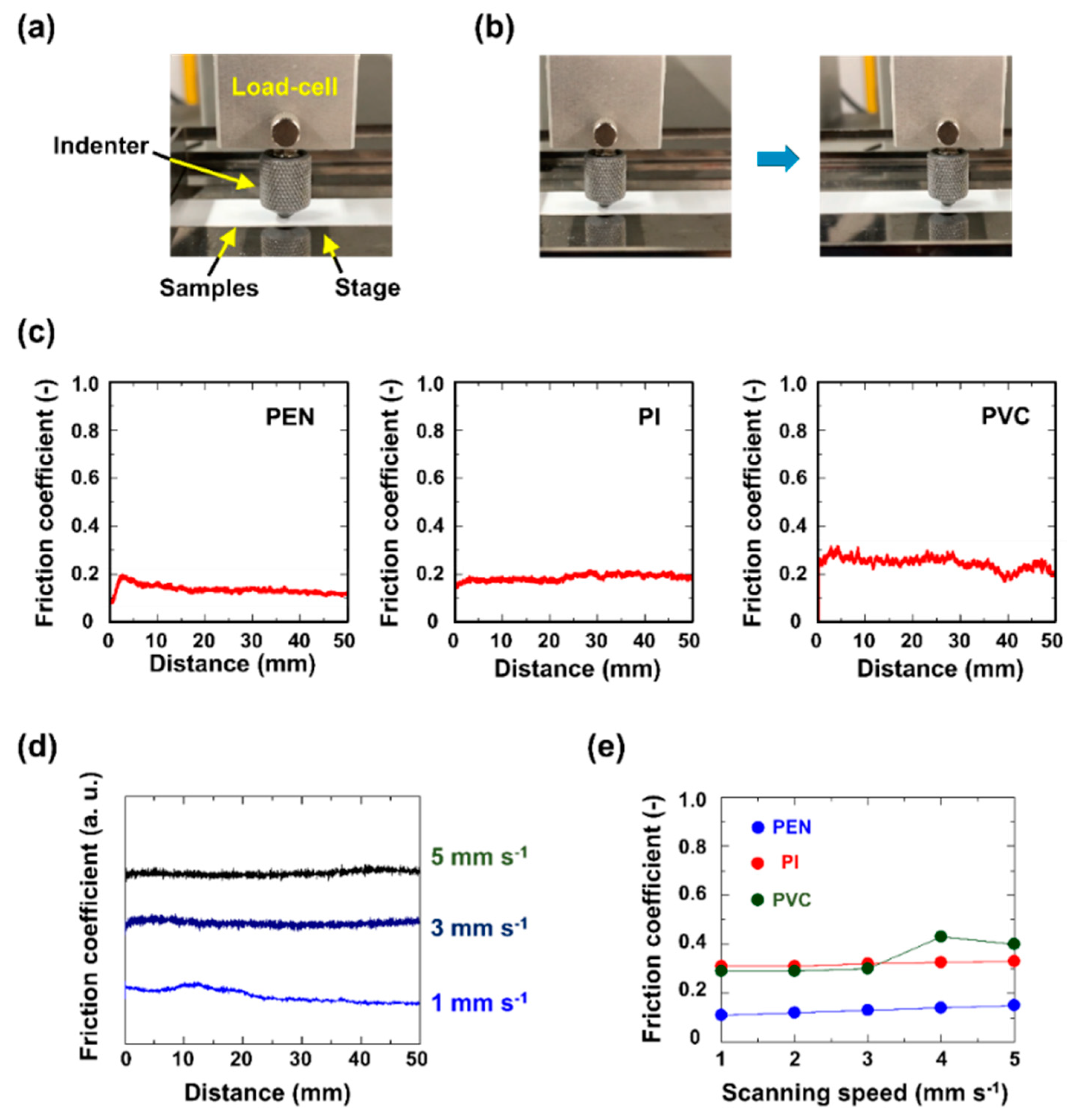
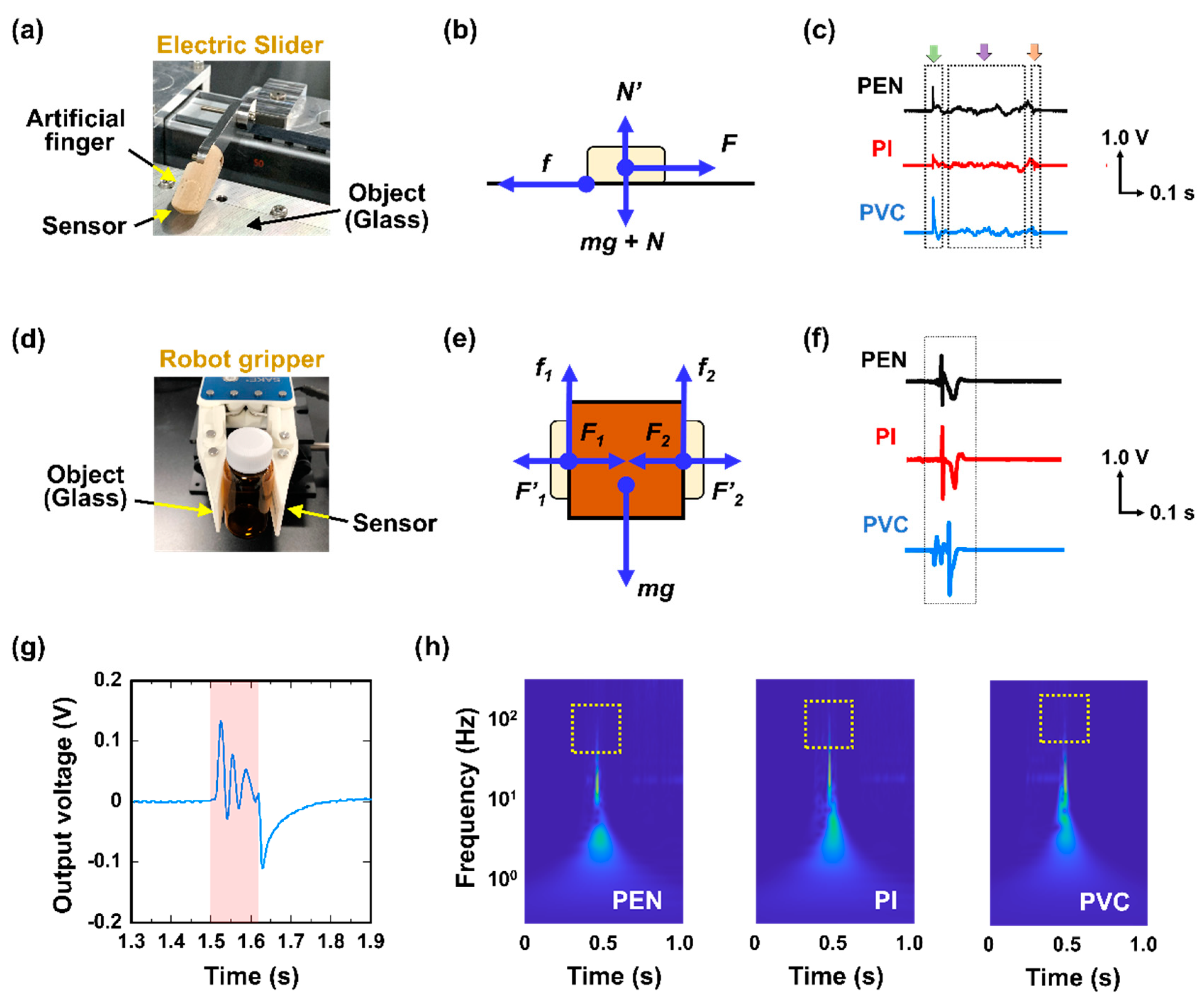
2.2. Sensor Characterization
2.3. Amplifier Circuit
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Christensen, H.I.; Okamura, A.; Mataric, M.; Kumar, V.; Hager, G.; Choset, H. Next Generation Robotics; Computing Community Consortium: Washington, DC, USA, 2016; pp. 1–22. [Google Scholar]
- Ho, V.; Hirai, S. Design and Analysis of a Soft-Fingered Hand With Contact Feedback. IEEE Robot. Autom. Lett. 2017, 2, 491–498. [Google Scholar] [CrossRef]
- Zhan, Z.; Lin, R.; Tran, V.-T.; An, J.; Wei, Y.; Du, H.; Tran, T.; Lu, W. Paper/Carbon Nanotube-Based Wearable Pressure Sensor for Physiological Signal Acquisition and Soft Robotic Skin. ACS Appl. Mater. Interfaces 2017, 9, 37921–37928. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4. [Google Scholar] [CrossRef]
- Cho, K.-J.; Koh, J.-S.; Kim, S.; Chu, W.-S.; Hong, Y.; Ahn, S.-H. Review of manufacturing processes for soft biomimetic robots. Int. J. Precis. Eng. Manuf. 2009, 10, 171–181. [Google Scholar] [CrossRef]
- Liu, G.; Tan, Q.; Kou, H.; Zhang, L.; Wang, J.; Lv, W.; Dong, H.; Xiong, J. A Flexible Temperature Sensor Based on Reduced Graphene Oxide for Robot Skin Used in Internet of Things. Sensors 2018, 18, 1400. [Google Scholar] [CrossRef] [PubMed]
- Konishi, S.; Hirata, A. Flexible Temperature Sensor Integrated with Soft Pneumatic Microactuators for Functional Microfingers. Sci. Rep. 2019, 9, 15634. [Google Scholar] [CrossRef]
- Shao, C.; Tanaka, S.; Nakayama, T.; Hata, Y.; Bartley, T.; Nonomura, Y.; Muroyama, M. A Tactile Sensor Network System Using a Multiple Sensor Platform with a Dedicated CMOS-LSI for Robot Applications. Sensors 2017, 17, 1974. [Google Scholar] [CrossRef]
- Lee, T.; Kim, C.; Cho, D.D. A Monocular Vision Sensor-Based Efficient SLAM Method for Indoor Service Robots. IEEE Trans. Ind. Electron. 2019, 66, 318–328. [Google Scholar] [CrossRef]
- Fan, J.; Jing, F.; Yang, L.; Teng, L.; Tan, M. A Precise Initial Weld Point Guiding Method of Micro-Gap Weld Based on Structured Light Vision Sensor. IEEE Sens. J. 2018, 19, 322–331. [Google Scholar] [CrossRef]
- Bartolozzi, C.; Natale, L.; Nori, F.; Metta, G. Robots with a sense of touch. Nat. Mater. 2016, 15, 921–925. [Google Scholar] [CrossRef]
- Salmi, T.; Ahola, J.M.; Heikkilä, T.; Kilpeläinen, P.; Malm, T. Human-Robot Collaboration and Sensor-Based Robots in Industrial Applications and Construction. In Robotic Building; Bier, H., Ed.; Springer Series in Adaptive Environments; Springer International Publishing: Cham, Switzerland, 2018; pp. 25–52. ISBN 978-3-319-70866-9. [Google Scholar]
- Boutry, C.M.; Negre, M.; Jorda, M.; Vardoulis, O.; Chortos, A.; Khatib, O.; Bao, Z. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics. Sci. Robot. 2018, 3. [Google Scholar] [CrossRef]
- Xie, M.; Hisano, K.; Zhu, M.; Toyoshi, T.; Pan, M.; Okada, S.; Tsutsumi, O.; Kawamura, S.; Bowen, C. Flexible Multifunctional Sensors for Wearable and Robotic Applications. Adv. Mater. Technol. 2019, 4, 1800626. [Google Scholar] [CrossRef]
- Matsusaka, K.; Uemura, M.; Kawamura, S. Highly Energy-Efficient Palletizing Tasks Using Resonance-Based Robot Motion Control. J. Mech. Eng. Autom. 2016, 6, 8–17. [Google Scholar] [CrossRef]
- Winfield, A. Ethical standards in robotics and AI. Nat. Electron. 2019, 2, 46–48. [Google Scholar] [CrossRef]
- Ghahramani, Z. Probabilistic machine learning and artificial intelligence. Nature 2015, 521, 452–459. [Google Scholar] [CrossRef]
- Ai, Y.; Lou, Z.; Chen, S.; Chen, D.; Wang, Z.M.; Jiang, K.; Shen, G. All rGO-on-PVDF-nanofibers based self-powered electronic skins. Nano Energy 2017, 35, 121–127. [Google Scholar] [CrossRef]
- Dutta, B.; Kar, E.; Bose, N.; Mukherjee, S. NiO@SiO2/PVDF: A Flexible Polymer Nanocomposite for a High Performance Human Body Motion-Based Energy Harvester and Tactile e-Skin Mechanosensor. ACS Sustain. Chem. Eng. 2018, 6, 10505–10516. [Google Scholar] [CrossRef]
- Roy, K.; Ghosh, S.K.; Sultana, A.; Garain, S.; Xie, M.; Bowen, C.R.; Henkel, K.; Schmeiβer, D.; Mandal, D. A Self-Powered Wearable Pressure Sensor and Pyroelectric Breathing Sensor Based on GO Interfaced PVDF Nanofibers. ACS Appl. Nano Mater. 2019, 2, 2013–2025. [Google Scholar] [CrossRef]
- Cui, Z. Printed Electronics: Materials, Technologies and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2016; ISBN 978-1-118-92092-3. [Google Scholar]
- Pyo, S.; Lee, J.-I.; Kim, M.-O.; Chung, T.; Oh, Y.; Lim, S.-C.; Park, J.; Kim, J. Development of a flexible three-axis tactile sensor based on screen-printed carbon nanotube-polymer composite. J. Micromech. Microeng. 2014, 24, 075012. [Google Scholar] [CrossRef]
- Hwang, J.; Jang, J.; Hong, K.; Kim, K.N.; Han, J.H.; Shin, K.; Park, C.E. Poly(3-hexylthiophene) wrapped carbon nanotube/poly(dimethylsiloxane) composites for use in finger-sensing piezoresistive pressure sensors. Carbon 2011, 49, 106–110. [Google Scholar] [CrossRef]
- Wang, Y.-F.; Sekine, T.; Takeda, Y.; Yokosawa, K.; Matsui, H.; Kumaki, D.; Shiba, T.; Nishikawa, T.; Tokito, S. Fully Printed PEDOT:PSS-based Temperature Sensor with High Humidity Stability for Wireless Healthcare Monitoring. Sci. Rep. 2020, 10, 2467. [Google Scholar] [CrossRef] [PubMed]
- Pecherskaya, E.A. The use of the Sawyer-Tower method and its modifications to measure the electrical parameters of ferroelectric materials. Meas. Tech. 2007, 50, 1101–1107. [Google Scholar] [CrossRef]
- Bae, J.-H.; Chang, S.-H. PVDF-based ferroelectric polymers and dielectric elastomers for sensor and actuator applications: A review. Funct. Compos. Struct. 2019, 1, 012003. [Google Scholar] [CrossRef]
- Stadlober, B.; Zirkl, M.; Irimia-Vladu, M. Route towards sustainable smart sensors: Ferroelectric polyvinylidene fluoride-based materials and their integration in flexible electronics. Chem. Soc. Rev. 2019, 48, 1787–1825. [Google Scholar] [CrossRef]
- Sekine, T.; Sugano, R.; Tashiro, T.; Sato, J.; Takeda, Y.; Matsui, H.; Kumaki, D.; Domingues Dos Santos, F.; Miyabo, A.; Tokito, S. Fully Printed Wearable Vital Sensor for Human Pulse Rate Monitoring using Ferroelectric Polymer. Sci. Rep. 2018, 8, 4442. [Google Scholar] [CrossRef]
- Zollo, L.; Pino, G.D.; Ciancio, A.L.; Ranieri, F.; Cordella, F.; Gentile, C.; Noce, E.; Romeo, R.A.; Bellingegni, A.D.; Vadalà, G.; et al. Restoring tactile sensations via neural interfaces for real-time force-and-slippage closed-loop control of bionic hands. Sci. Robot. 2019, 4, eaau9924. [Google Scholar] [CrossRef]
- Thompson, P.A.; Robbins, M.O. Origin of Stick-Slip Motion in Boundary Lubrication. Science 1990, 250, 792–794. [Google Scholar] [CrossRef] [PubMed]
- Berman, A.D.; Ducker, W.A.; Israelachvili, J.N. Origin and Characterization of Different Stick−Slip Friction Mechanisms. Langmuir 1996, 12, 4559–4563. [Google Scholar] [CrossRef]
- Lee, D.W.; Banquy, X.; Israelachvili, J.N. Stick-slip friction and wear of articular joints. Proc. Natl. Acad. Sci. USA 2013, 110, E567–E574. [Google Scholar] [CrossRef]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miura, R.; Sekine, T.; Wang, Y.-F.; Hong, J.; Watanabe, Y.; Ito, K.; Shouji, Y.; Takeda, Y.; Kumaki, D.; Santos, F.D.D.; et al. Printed Soft Sensor with Passivation Layers for the Detection of Object Slippage by a Robotic Gripper. Micromachines 2020, 11, 927. https://doi.org/10.3390/mi11100927
Miura R, Sekine T, Wang Y-F, Hong J, Watanabe Y, Ito K, Shouji Y, Takeda Y, Kumaki D, Santos FDD, et al. Printed Soft Sensor with Passivation Layers for the Detection of Object Slippage by a Robotic Gripper. Micromachines. 2020; 11(10):927. https://doi.org/10.3390/mi11100927
Chicago/Turabian StyleMiura, Reo, Tomohito Sekine, Yi-Fei Wang, Jinseo Hong, Yushi Watanabe, Keita Ito, Yoshinori Shouji, Yasunori Takeda, Daisuke Kumaki, Fabrice Domingues Dos Santos, and et al. 2020. "Printed Soft Sensor with Passivation Layers for the Detection of Object Slippage by a Robotic Gripper" Micromachines 11, no. 10: 927. https://doi.org/10.3390/mi11100927
APA StyleMiura, R., Sekine, T., Wang, Y.-F., Hong, J., Watanabe, Y., Ito, K., Shouji, Y., Takeda, Y., Kumaki, D., Santos, F. D. D., Miyabo, A., & Tokito, S. (2020). Printed Soft Sensor with Passivation Layers for the Detection of Object Slippage by a Robotic Gripper. Micromachines, 11(10), 927. https://doi.org/10.3390/mi11100927