Analysis of Stiffness Effect on Valve Behavior of a Reciprocating Pump Operated by Piezoelectric Elements



Abstract
1. Introduction
2. Piezoelectric Pump
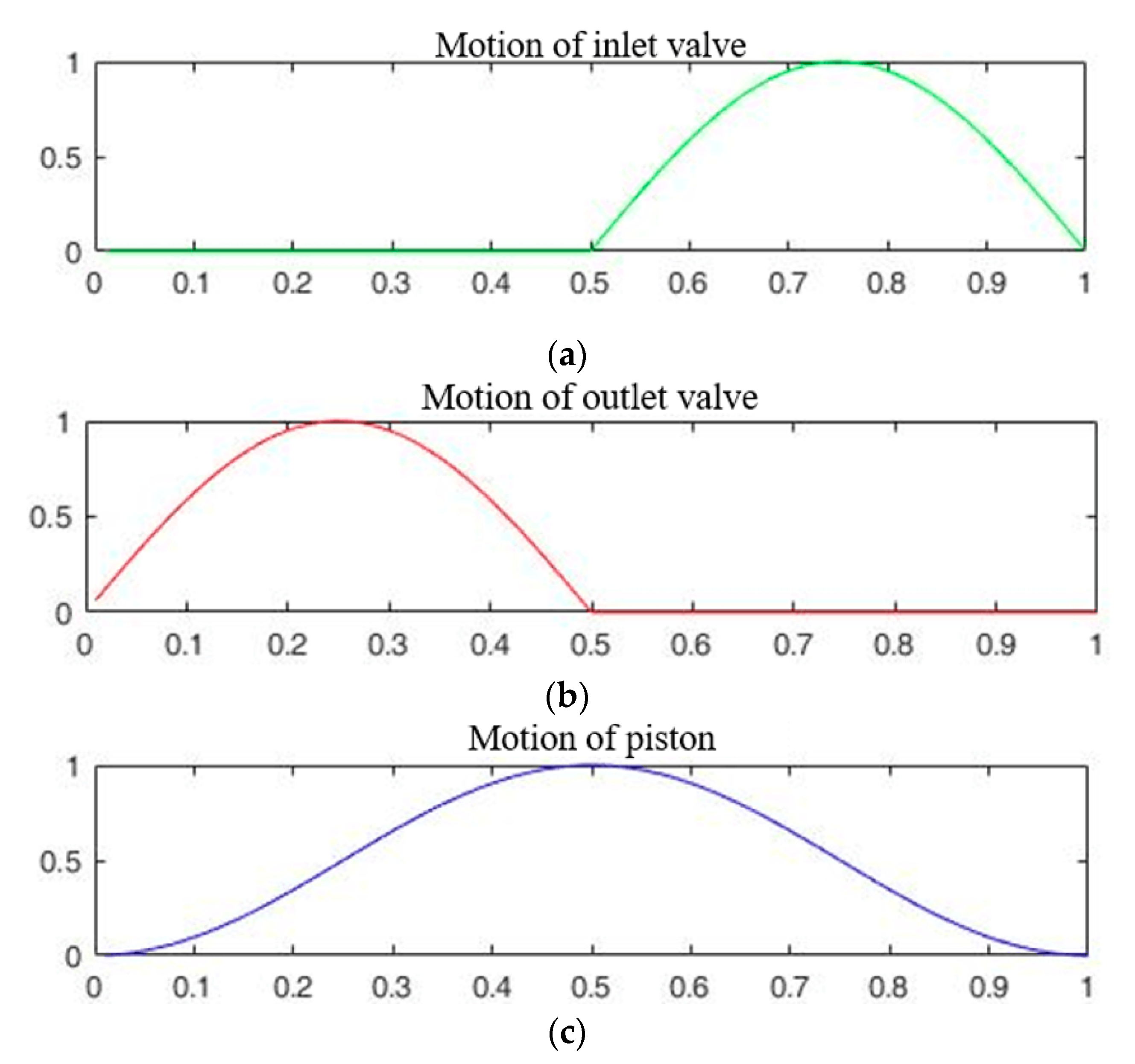
2.1. Driving Scheme
2.2. Pump Manufacturing
3. Experimental Setup
3.1. Working Fluid
3.2. Experimental Equipment
4. Results and Discussion
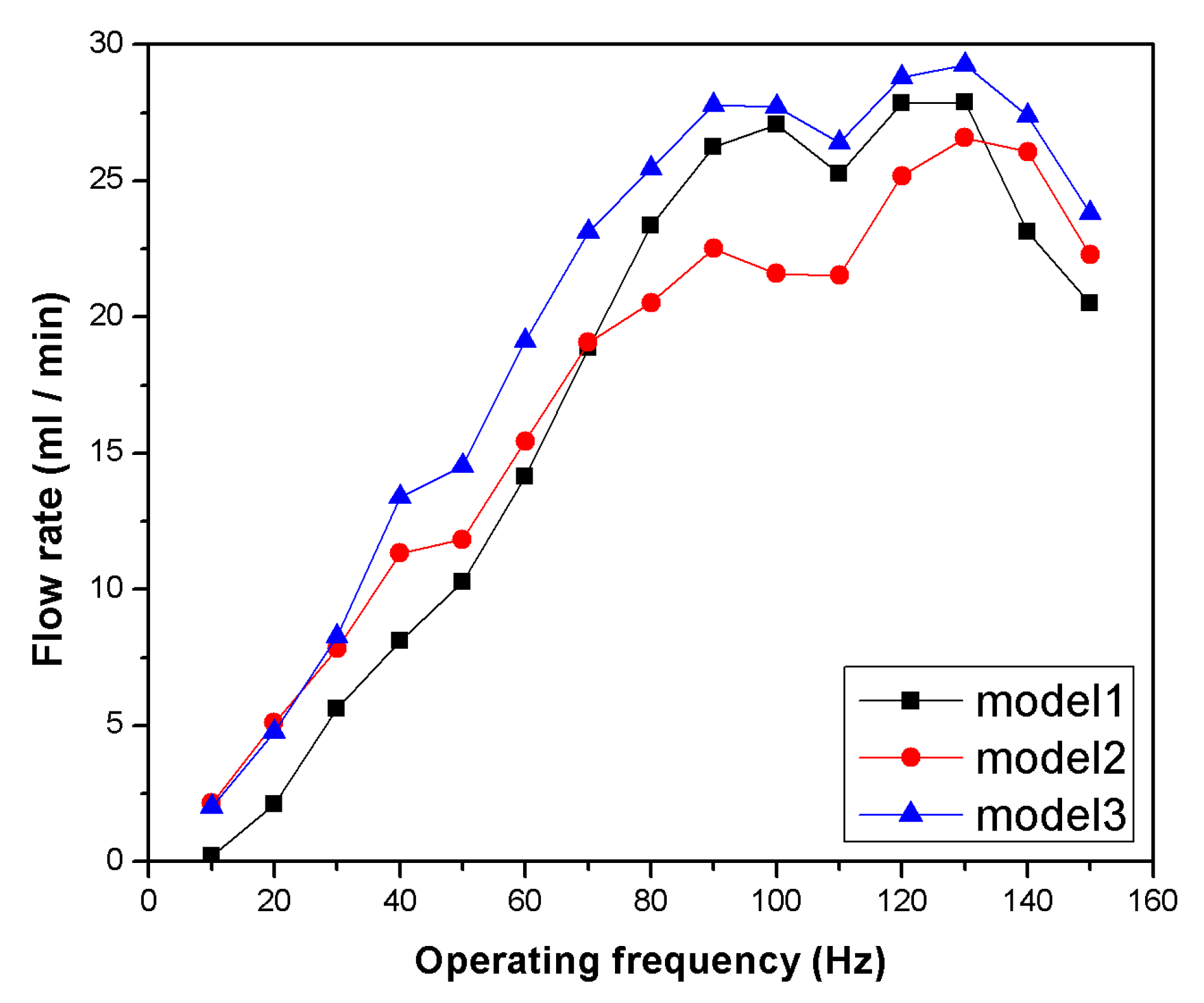
4.1. Operating Performance
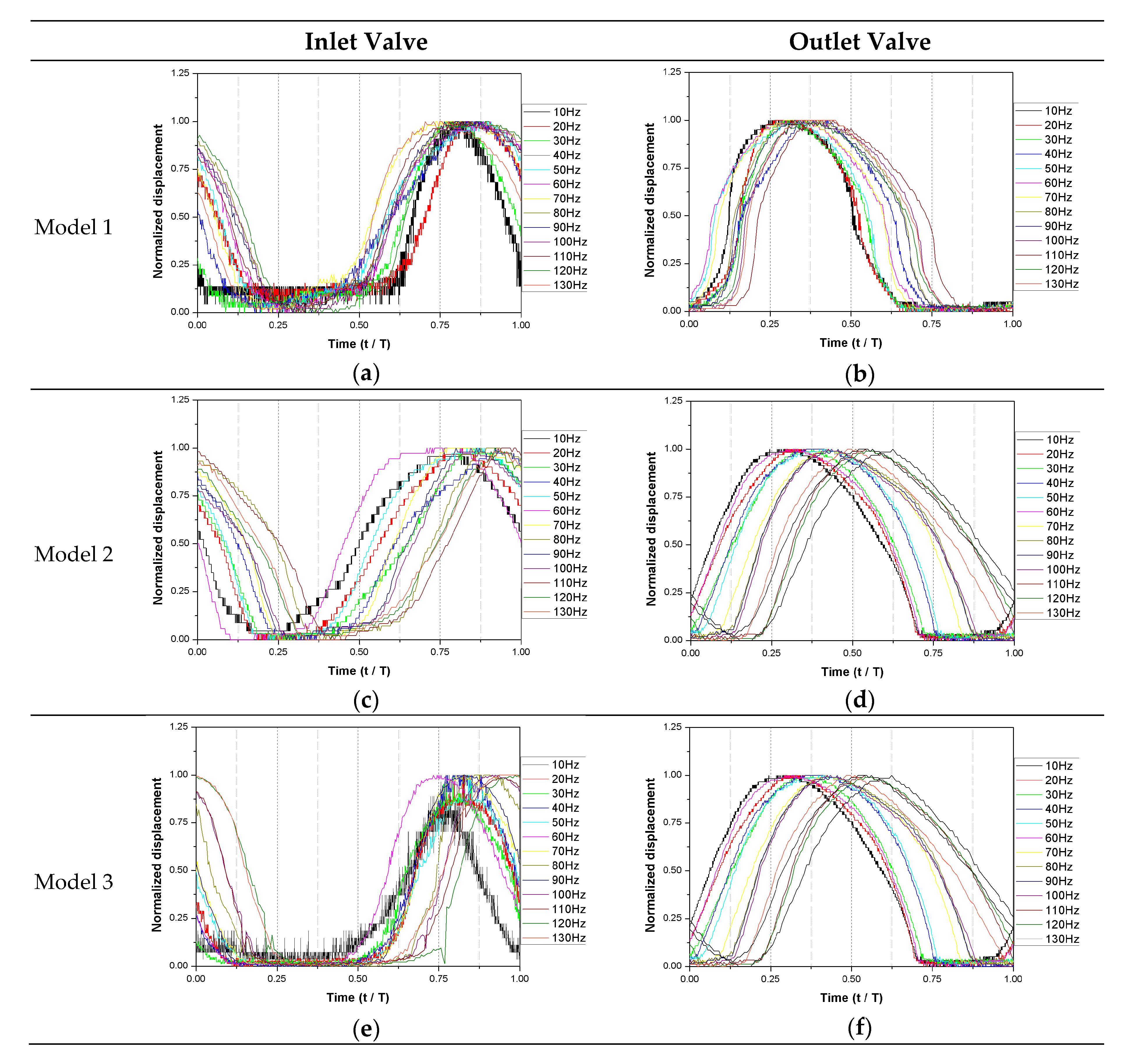
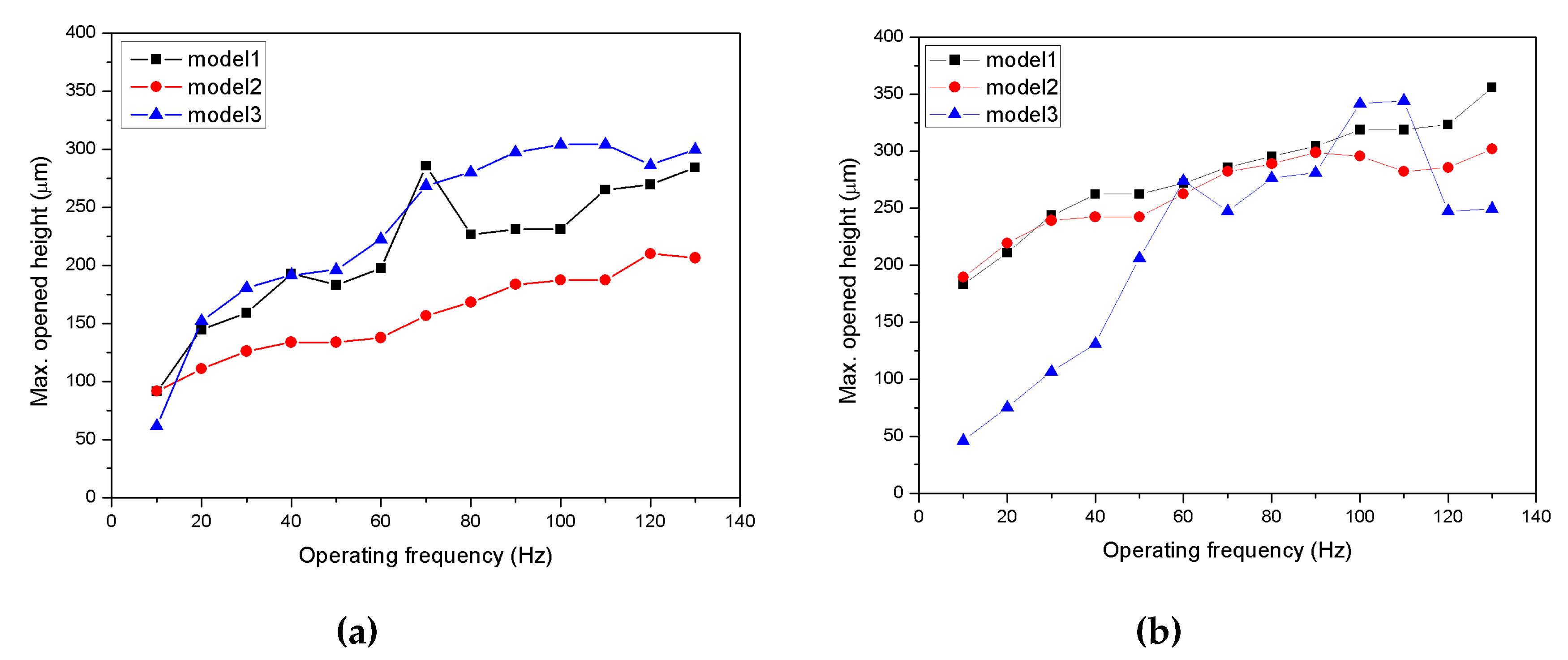
4.2. Valve Behavior
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mohith, S.; Karanth, P.N.; Kulkarni, S.M. Recent trends in mechanical micropumps and their applications: A review. Mechatronics 2019, 60, 34–55. [Google Scholar] [CrossRef]
- Ashraf, M.W.; Tayyaba, S.; Afzulpurkar, N. Micro Electromechanical Systems (MEMS) Based Microfluidic Devices for Biomedical Applications. Int. J. Mol. Sci. 2011, 12, 3648–3704. [Google Scholar] [CrossRef] [PubMed]
- Wong, H.; Iwai, H. The road to miniaturization. Phys. World 2005, 18, 40–44. [Google Scholar] [CrossRef]
- Garcia, E. Smart structures and actuators: Past, present, and future. In Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies, Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 17–21 March 2002; International Society for Optics and Photonics: San Jose, CA, USA, 2002; Volume 4698, pp. 1–12. [Google Scholar]
- Laser, D.J.; Santiago, J.G. A review of micropumps. J. Micromech. Microeng. 2004, 14, R35–R64. [Google Scholar] [CrossRef]
- John, S.; Sirohi, J.; Wang, G.; Wereley, N.M. Comparison of Piezoelectric, Magnetostrictive, and Electrostrictive Hybrid Hydraulic Actuators. J. Intell. Mater. Syst. Struct. 2016. [Google Scholar] [CrossRef]
- Li, B.; Chen, Q.; Lee, D.-G.; Woolman, J.; Carman, G.P. Development of large flow rate, robust, passive micro check valves for compact piezoelectrically actuated pumps. Sens. Actuators Phys. 2005, 117, 325–330. [Google Scholar] [CrossRef]
- Dong, J.S.; Liu, R.G.; Liu, W.S.; Chen, Q.Q.; Yang, Y.; Wu, Y.; Yang, Z.G.; Lin, B.S. Design of a piezoelectric pump with dual vibrators. Sens. Actuators Phys. 2017, 257, 165–172. [Google Scholar] [CrossRef]
- Ye, Y.; Chen, J.; Ren, Y.J.; Feng, Z.H. Valve improvement for high flow rate piezoelectric pump with PDMS film valves. Sens. Actuators Phys. 2018, 283, 245–253. [Google Scholar] [CrossRef]
- Wang, Y.-N.; Fu, L.-M. Micropumps and biomedical applications—A review. Microelectron. Eng. 2018, 195, 121–138. [Google Scholar] [CrossRef]
- Linnemann, R.; Woias, P.; Senfft, C.-D.; Ditterich, J.A. A self-priming and bubble-tolerant piezoelectric silicon micropump for liquids and gases. In Proceedings of the Proceedings MEMS 98. IEEE. Eleventh Annual International Workshop on Micro Electro Mechanical Systems. An Investigation of Micro Structures, Sensors, Actuators, Machines and Systems (Cat. No.98CH36176), Heidelberg, Germany, 25–29 January 1998; pp. 532–537. [Google Scholar]
- Liu, J.F.; Yadavali, S.; Tsourkas, A.; Issadore, D. Microfluidic diafiltration-on-chip using an integrated magnetic peristaltic micropump. Lab Chip 2017, 17, 3796–3803. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Z.; Huang, Y. A valve-less microfluidic peristaltic pumping method. Biomicrofluidics 2015, 9, 014118. [Google Scholar] [CrossRef] [PubMed]
- Pourmand, A.; Shaegh, S.A.M.; Ghavifekr, H.B.; Najafi Aghdam, E.; Dokmeci, M.R.; Khademhosseini, A.; Zhang, Y.S. Fabrication of whole-thermoplastic normally closed microvalve, micro check valve, and micropump. Sens. Actuators B Chem. 2018, 262, 625–636. [Google Scholar] [CrossRef]
- Zhang, R.; You, F.; Lv, Z.; He, Z.; Wang, H.; Huang, L. Development and Characterization a Single-Active-Chamber Piezoelectric Membrane Pump with Multiple Passive Check Valves. Sensors 2016, 16, 2108. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Liu, Y.; Shen, Y.; Wang, J.; Yang, Z. The Structure of Wheel Check Valve Influence on Air Block Phenomenon of Piezoelectric Micro-Pump. Micromachines 2015, 6, 1745–1754. [Google Scholar] [CrossRef]
- Yokota, S. A review on micropumps from the viewpoint of volumetric power density. Mech. Eng. Rev. 2014, 1, DSM0014. [Google Scholar] [CrossRef][Green Version]
- Oh, K.W.; Ahn, C.H. A review of microvalves. J. Micromech. Microeng. 2006, 16, R13–R39. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, Z. Microfluidic Passive Flow Regulatory Device with an Integrated Check Valve for Enhanced Flow Control. Micromachines 2019, 10, 653. [Google Scholar] [CrossRef]
- Van Lintel, H.T.G.; van De Pol, F.C.M.; Bouwstra, S. A piezoelectric micropump based on micromachining of silicon. Sens. Actuators 1988, 15, 153–167. [Google Scholar] [CrossRef]
- Larson, J.P.; Dapino, M.J. Reliable, high-frequency miniature valves for smart material electrohydraulic actuators. J. Intell. Mater. Syst. Struct. 2012. [Google Scholar] [CrossRef]
- Ryu, J.; Park, S.G.; Kim, B.; Sung, H.J. Flapping dynamics of an inverted flag in a uniform flow. J. Fluids Struct. 2015, 57, 159–169. [Google Scholar] [CrossRef]
- Srikanth, C.; Bhasker, C. Flow analysis in valve with moving grids through CFD techniques. Adv. Eng. Softw. 2009, 40, 193–201. [Google Scholar] [CrossRef]
- Chen, Y.; Luo, H. A computational study of the three-dimensional fluid–structure interaction of aortic valve. J. Fluids Struct. 2018, 80, 332–349. [Google Scholar] [CrossRef]
- Menéndez-Blanco, A.; Fernández Oro, J.M.; Meana-Fernández, A. Unsteady three-dimensional modeling of the Fluid–Structure Interaction in the check valves of diaphragm volumetric pumps. J. Fluids Struct. 2019, 90, 432–449. [Google Scholar] [CrossRef]
- Brummelen, V.H.E. Added Mass Effects of Compressible and Incompressible Flows in Fluid-Structure Interaction. J. Appl. Mech. 2009, 76. [Google Scholar] [CrossRef]
- Causin, P.; Gerbeau, J.F.; Nobile, F. Added-mass effect in the design of partitioned algorithms for fluid–structure problems. Comput. Methods Appl. Mech. Eng. 2005, 194, 4506–4527. [Google Scholar] [CrossRef]
- Ha, S.T.; Choi, H.G. Investigation on the effect of density ratio on the convergence behavior of partitioned method for fluid–structure interaction simulation. J. Fluids Struct. 2020, 96, 103050. [Google Scholar] [CrossRef]
- Li, L.; Henshaw, W.D.; Banks, J.W.; Schwendeman, D.W.; Main, A. A stable partitioned FSI algorithm for incompressible flow and deforming beams. J. Comput. Phys. 2016, 312, 272–306. [Google Scholar] [CrossRef]
- Oates, W.S.; Mauck, L.A.; Lynch, C.S. PZT piston driven hydraulic pump development. In Proceedings of the ISAF 2000. Proceedings of the 2000 12th IEEE International Symposium on Applications of Ferroelectrics (IEEE Cat. No.00CH37076), Honolulu, HI, USA, 21 July–2 August 2000; Volume 2, pp. 733–736. [Google Scholar]
- Wachel, J.C.; Tison, J.D. Vibrations in Reciprocating Machinery and Piping Systems. Tex. AM Univ. Turbomach. Lab. 1994, 243–272. [Google Scholar] [CrossRef]
- Woo, J.; Sohn, D.K.; Ko, H.S. Performance and flow analysis of small piezo pump. Sens. Actuators Phys. 2020, 301, 111766. [Google Scholar] [CrossRef]
- Kan, J.; Yang, Z.; Peng, T.; Cheng, G.; Wu, B. Design and test of a high-performance piezoelectric micropump for drug delivery. Sens. Actuators Phys. 2005, 121, 156–161. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | p-885.91 |
|---|---|
| Cross-sectional area (mm2) | 5 × 5 |
| Length (mm) | 36 |
| Capacitance (nF) | 3.1 |
| Blocking force (N) | 950 |
| Max. Displacement (µm) | 38 |
| Stiffness (N/µm) | 25 |
| Property | Value |
|---|---|
| Working fluid | 70% aqueous glycerin solution |
| Density (kg/m3) | 1181 |
| Viscosity (cP) | 22.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, J.; Sohn, D.K.; Ko, H.S. Analysis of Stiffness Effect on Valve Behavior of a Reciprocating Pump Operated by Piezoelectric Elements. Micromachines 2020, 11, 894. https://doi.org/10.3390/mi11100894
Woo J, Sohn DK, Ko HS. Analysis of Stiffness Effect on Valve Behavior of a Reciprocating Pump Operated by Piezoelectric Elements. Micromachines. 2020; 11(10):894. https://doi.org/10.3390/mi11100894
Chicago/Turabian StyleWoo, Jangmi, Dong Kee Sohn, and Han Seo Ko. 2020. "Analysis of Stiffness Effect on Valve Behavior of a Reciprocating Pump Operated by Piezoelectric Elements" Micromachines 11, no. 10: 894. https://doi.org/10.3390/mi11100894
APA StyleWoo, J., Sohn, D. K., & Ko, H. S. (2020). Analysis of Stiffness Effect on Valve Behavior of a Reciprocating Pump Operated by Piezoelectric Elements. Micromachines, 11(10), 894. https://doi.org/10.3390/mi11100894