Collaboration and Task Planning of Turtle-Inspired Multiple Amphibious Spherical Robots



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Design Criteria
2.1. Mechanical Design
2.2. Communication Module
2.3. Visual Servoing Evaluation
3. Motion Algorithm and Modeling
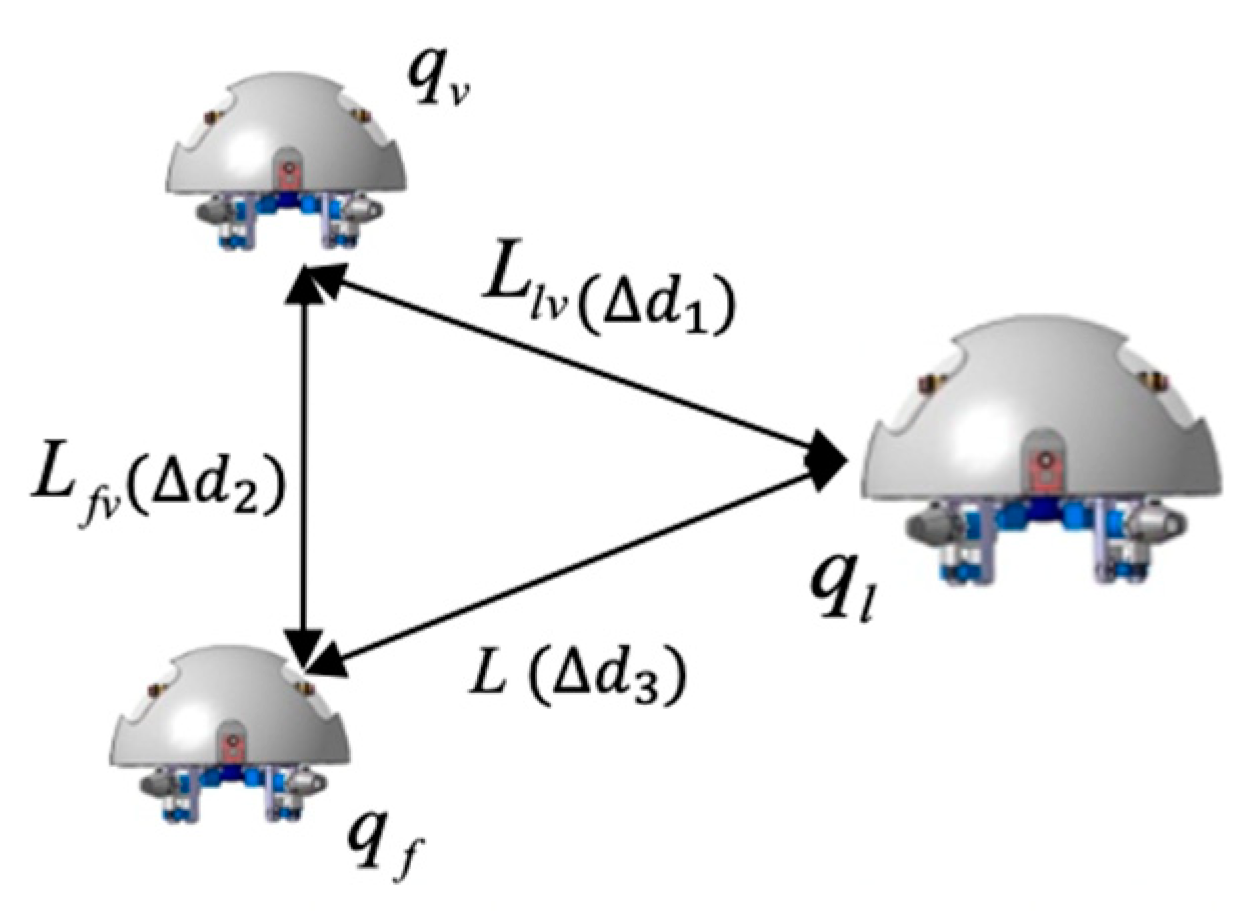
3.1. Formation Control Modeling
3.2. Bidding-Based Queue
4. Performance Verification
4.1. Experiment I: Robot Stability Evaluation
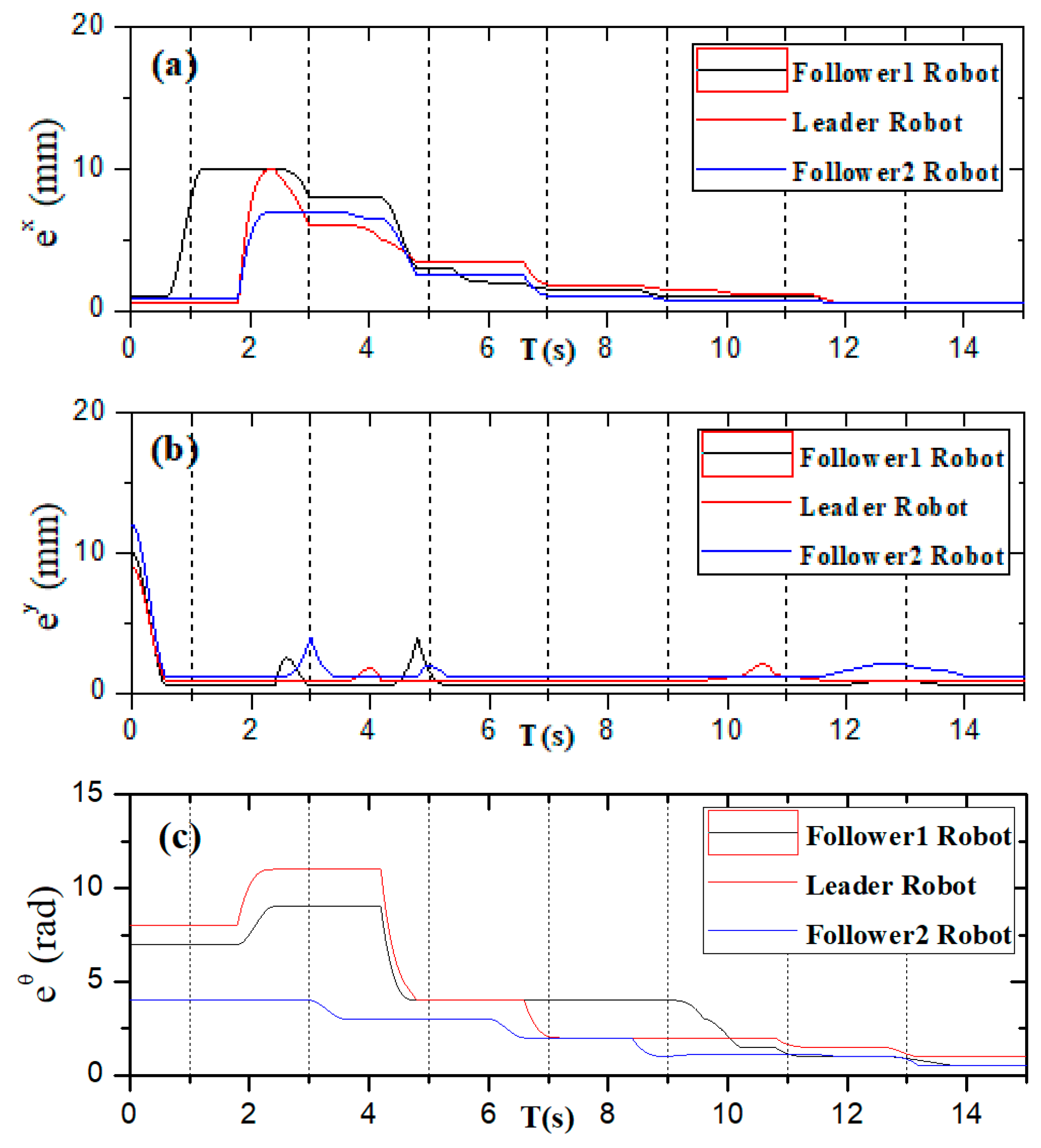
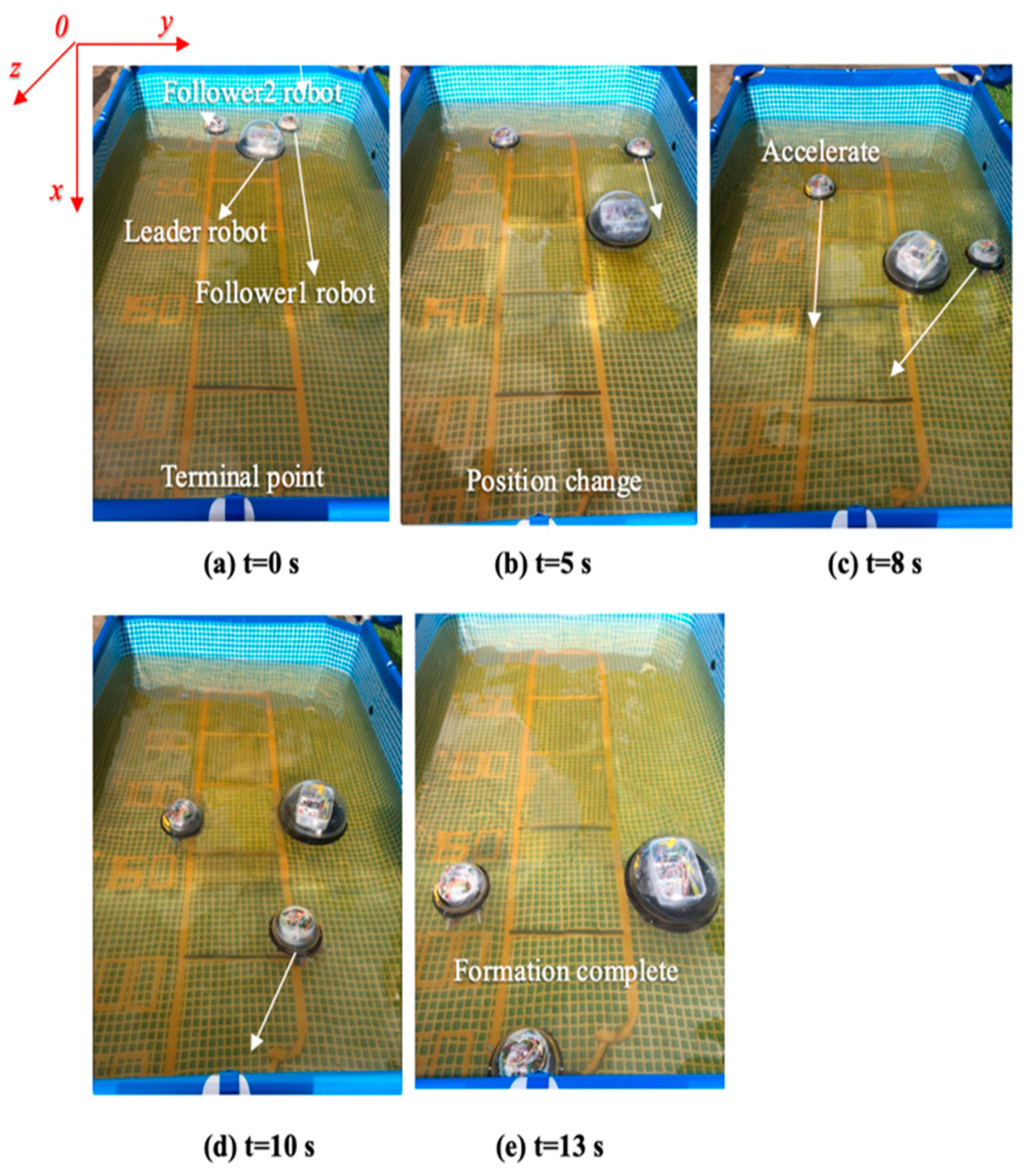
4.2. Experiment II: Formation Control Evaluation
4.3. Experiment III: Bidding Strategy for Multi Robot
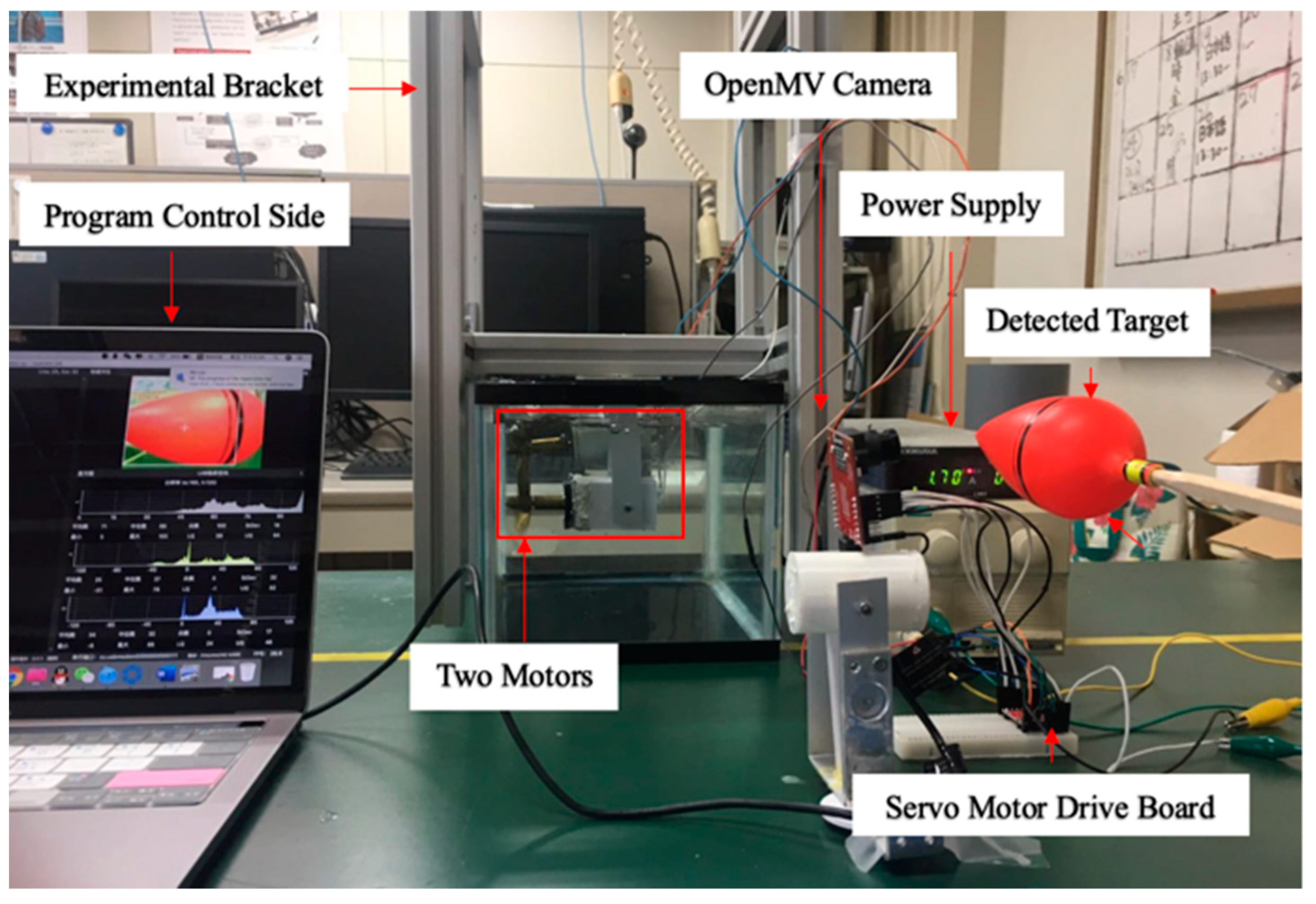
4.4. Experiment IV: Visual Servoing Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zheng, L.; Guo, S.; Piao, Y.; Gu, S.; An, R.; Sui, W. Study on cooperative control algorithm of two spherical amphibious robots. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 76–80. [Google Scholar]
- Verma, S.; Xu, J.X. Analytic modeling for precise speed tracking of multilink robotic fish. IEEE Trans. Ind. Electron. 2017, 65, 5665–5672. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, J.; Yu, J.; Fang, H. Development of a novel robotic dolphin and its application to water quality monitoring. IEEE/ASME Trans. Mechatron. 2017, 22, 2130–2140. [Google Scholar] [CrossRef]
- Bi, C.; Guix, M.; Johnson, B.; Jing, W.; Cappelleri, D. Design of microscale magnetic tumbling robots for locomotion in multiple environments and complex terrains. Micromachines 2018, 9, 68. [Google Scholar] [CrossRef]
- Wang, W.; Yan, G.; Wang, Z.; Jiang, P.; Meng, Y.; Chen, F.; Xue, R. A Novel Expanding Mechanism of Gastrointestinal Microrobot: Design, Analysis and Optimization. Micromachines 2019, 10, 724. [Google Scholar] [CrossRef] [PubMed]
- Hu, T.; Low, K.H.; Shen, L.; Xu, X. Effective phase tracking for bioinspired undulations of robotic fish models: A learning control approach. IEEE/ASME Trans. Mechatron. 2012, 19, 191–200. [Google Scholar] [CrossRef]
- Giorgio-Serchi, F.; Arienti, A.; Laschi, C. Underwater soft-bodied pulsed-jet thrusters: Actuator modeling and performance profiling. Int. J. Robot. Res. 2016, 35, 1308–1329. [Google Scholar]
- Kohl, A.M.; Kelasidi, E.; Mohammadi, A.; Maggiore, M.; Pettersen, K.Y. Planar maneuvering control of underwater snake robots using virtual holonomic constraints. Bioinspiration Biomim. 2016, 11, 065005. [Google Scholar] [CrossRef]
- Ailon, A.; Zohar, I. Control strategies for driving a group of nonholonomic kinematic mobile robots in formation along a time-parameterized path. IEEE/ASME Trans. Mechatron. 2011, 17, 326–336. [Google Scholar] [CrossRef]
- Xing, H.; Shi, L.; Tang, K.; Guo, S.; Hou, X.; Liu, Y.; Hu, Y. Robust RGB-D Camera and IMU Fusion-based Cooperative and Relative Close-range Localization for Multiple Turtle-inspired Amphibious Spherical Robots. J. Bionic Eng. 2019, 16, 442–454. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, W.; Zhou, Y.; Wang, C.; Fan, R.; Xie, G. CSMA/CA-based electrocommunication system design for underwater robot groups. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BV, Canada, 24–28 September 2017; pp. 2415–2420. [Google Scholar]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E. Vision-based corrosion detection assisted by a micro-aerial vehicle in a vessel inspection application. Sensors 2016, 16, 2118. [Google Scholar] [CrossRef]
- Garcia-Fidalgo, E.; Ortiz, A.; Massot-Campos, M. Vision-Based Control for an AUV in a Multi-robot Undersea Intervention Task. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2017; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Bonnin-Pascual, F.; Ortiz, A.; Garcia-Fidalgo, E. Testing the Control Architecture of a Micro-Aerial Vehicle for Visual Inspection of Vessels. In Proceedings of the Iberian Robotics Conference, Porto, Portugal, 20–22 November 2017; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Cai, H.; Huang, J. The leader-following consensus for multiple uncertain Euler-Lagrange systems with an adaptive distributed observer. IEEE Trans. Autom. Control 2015, 61, 3152–3157. [Google Scholar] [CrossRef]
- Wang, H. Second-order consensus of networked thrust-propelled vehicles on directed graphs. IEEE Trans. Autom. Control 2015, 61, 222–227. [Google Scholar] [CrossRef]
- Ghapani, S.; Mei, J.; Ren, W.; Song, Y. Fully distributed flocking with a moving leader for Lagrange networks with parametric uncertainties. Automatica 2016, 67, 67–76. [Google Scholar] [CrossRef]
- Meng, Z.; Xia, W.; Johansson, K.H.; Hirche, S. Stability of positive switched linear systems: Weak excitation and robustness to time-varying delay. IEEE Trans. Autom. Control 2016, 62, 399–405. [Google Scholar] [CrossRef]
- Dong, X.; Hu, G. Time-varying formation tracking for linear multiagent systems with multiple leaders. IEEE Trans. Autom. Control 2017, 62, 3658–3664. [Google Scholar] [CrossRef]
- Wei, H.; Lv, Q.; Duo, N.; Wang, G.; Liang, B. Consensus Algorithms Based Multi-Robot Formation Control under Noise and Time Delay Conditions. Appl. Sci. 2019, 9, 1004. [Google Scholar] [CrossRef]
- Wen, G.; Zhao, Y.; Duan, Z.; Yu, W.; Chen, G. Containment of higher-order multi-leader multi-agent systems: A dynamic output approach. IEEE Trans. Autom. Control 2015, 61, 1135–1140. [Google Scholar] [CrossRef]
- Mu, X.; Liu, K. Containment control of single-integrator network with limited communication data rate. IEEE Trans. Autom. Control 2015, 61, 2232–2238. [Google Scholar] [CrossRef]
- Pearce, M.; Mutlu, B.; Shah, J.; Radwin, R. Optimizing makespan and ergonomics in integrating collaborative robots into manufacturing processes. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1772–1784. [Google Scholar] [CrossRef]
- Biswas, S.; Anavatti, S.G.; Garratt, M.A. A Time-Efficient Co-Operative Path Planning Model Combined with Task Assignment for Multi-Agent Systems. Robotics 2019, 8, 35. [Google Scholar] [CrossRef]
- Bit-Monnot, A.; Leofante, F.; Pulina, L.; Tacchella, A. SMT-based Planning for Robots in Smart Factories. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Graz, Austria, 9–11 July 2019; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Zhang, J.; Ding, D.W.; An, C. Fault-Tolerant Containment Control for Linear Multi-Agent Systems: An Adaptive Output Regulation Approach. IEEE Access 2019, 7, 89306–89315. [Google Scholar] [CrossRef]
- Yu, J.; Liu, J.; Wu, Z.; Fang, H. Depth control of a bioinspired robotic dolphin based on sliding-mode fuzzy control method. IEEE Trans. Ind. Electron. 2017, 65, 2429–2438. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Shi, P. Command Filtered Backstepping-Based Attitude Containment Control for Spacecraft Formation. IEEE Trans. Syst. Man Cybern. Syst. 2019, 20, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Zakharov, Y.V.; Li, J.; Li, Y.; Lin, C.; Li, X. Deep learning based single carrier communications over time-varying underwater acoustic channel. IEEE Access 2019, 7, 38420–38430. [Google Scholar] [CrossRef]
- Park, K.-H. IEEE Access Special Section Editorial: Underwater Wireless Communications and Networking. IEEE Access 2019, 7, 52288–52294. [Google Scholar] [CrossRef]
- Siddiqui, S.I.; Dong, H. Time Diversity Passive Time Reversal for Underwater Acoustic Communications. IEEE Access 2019, 7, 24258–24266. [Google Scholar] [CrossRef]
- Centelles, D.; Soriano-Asensi, A.; Martí, J.V.; Marín, R.; Sanz, P.J. Underwater Wireless Communications for Cooperative Robotics with UWSim-NET. Appl. Sci. 2019, 9, 3526. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H.; Wang, J.; Au, K.W.S.; Chen, W. Underwater Dynamic Visual Servoing for A Soft Robot Arm with Online Distortion Correction. IEEE/ASME Trans. Mechatron. 2019, 24, 979–989. [Google Scholar] [CrossRef]
- Li, J.; Huang, H.; Xu, Y.; Wu, H.; Wan, L. Uncalibrated Visual Servoing for Underwater Vehicle Manipulator Systems with an Eye in Hand Configuration Camera. Sensors 2019, 19, 5469. [Google Scholar] [CrossRef]
- Sheng, M.; Tang, S.; Qin, H.; Wan, L. Clustering Cloud-Like Model-Based Targets Underwater Tracking for AUVs. Sensors 2019, 19, 370. [Google Scholar] [CrossRef]
- Zheng, L.; Guo, S.; Gu, S. The communication and stability evaluation of amphibious spherical robots. Microsyst. Technol. 2018, 25, 2625–2636. [Google Scholar] [CrossRef]
- Zheng, L.; Guo, S.; Gu, S. Structure Improvement and Stability for an Amphibious Spherical Robot. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; IEEE: Piscataway Township, NJ, USA, 2018. [Google Scholar]
- Gu, S.; Guo, S. Performance evaluation of a novel propulsion system for the spherical underwater robot (SURIII). Appl. Sci. 2017, 7, 1196. [Google Scholar] [CrossRef]
- Xing, H.; Guo, S.; Shi, L. Hybrid locomotion evaluation for a novel amphibious spherical robot. Appl. Sci. 2018, 8, 156. [Google Scholar] [CrossRef]
- Hou, X.; Guo, S.; Shi, L. Hydrodynamic analysis-based modeling and experimental verification of a new water-jet thruster for an amphibious spherical robot. Sensors 2019, 19, 259. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Piao, Y.; Ma, Y. Development and control of articulated amphibious spherical robot. Microsyst. Technol. in press. [CrossRef]
- Guo, S.; He, Y.; Shi, L.; Pan, S.; Tang, K.; Xiao, R.; Guo, P. Modal and fatigue analysis of critical components of an amphibious spherical robot. Microsyst. Technol. 2017, 23, 2233–2247. [Google Scholar] [CrossRef]
































© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, L.; Guo, S.; Piao, Y.; Gu, S.; An, R. Collaboration and Task Planning of Turtle-Inspired Multiple Amphibious Spherical Robots. Micromachines 2020, 11, 71. https://doi.org/10.3390/mi11010071
Zheng L, Guo S, Piao Y, Gu S, An R. Collaboration and Task Planning of Turtle-Inspired Multiple Amphibious Spherical Robots. Micromachines. 2020; 11(1):71. https://doi.org/10.3390/mi11010071
Chicago/Turabian StyleZheng, Liang, Shuxiang Guo, Yan Piao, Shuoxin Gu, and Ruochen An. 2020. "Collaboration and Task Planning of Turtle-Inspired Multiple Amphibious Spherical Robots" Micromachines 11, no. 1: 71. https://doi.org/10.3390/mi11010071
APA StyleZheng, L., Guo, S., Piao, Y., Gu, S., & An, R. (2020). Collaboration and Task Planning of Turtle-Inspired Multiple Amphibious Spherical Robots. Micromachines, 11(1), 71. https://doi.org/10.3390/mi11010071