Fabrication of Hydrophilic Surface on Rigid Gas Permeable Contact Lenses to Enhance the Wettability Using Ultraviolet Laser System




Abstract
1. Introduction
2. Fundamental Theory
3. Materials and Experimental Setup
3.1. Materials
3.2. Experimental Setup
3.2.1. Surface Treatment: UV Laser (355 nm) Processing and Oxygen Plasma Cleaning
3.2.2. Contact Angle Measurement and Surface Morphology Observation
3.2.3. Experimental Process
- Step (I):
- The AutoCAD package was used to design the ablation path of the laser spot. The parameter of the pitch of two ablated lines was adjusted to range from 30 to 110 μm with intervals of 20 μm.
- Step (II):
- The parameters, such as the power and pulse repetition frequency of the laser system, were fixed, and the scanning speed of the laser spot was adjusted to generate various spot overlaps, line widths, and surface roughness.
- Step (III):
- A 3D confocal microscope was used to measure the morphology of the ablated mesh pattern and analyze the relationship of the real line pitch, width, and surface roughness with the scanning speed during laser treatment. Herein, the surface roughness was the mean height (Ra).
- Step (IV):
- The XO RGP contact lens was placed into an ultrasonic oscillator with DI (de-ionized) water for 10 min to clean its surface, and nitrogen (N2) was used to blow dry its surface. The lens was then processed for contact angle measurement, for which a 3-μL droplet of physiological saline was added to the lens. The contact angle was measured. In addition, the relationship between the contact angle and surface roughness of the XO RGP contact lens was analyzed to obtain the best pattern to reduce the contact angle and enhance the wettability of RGP contact lenses.
4. Experimental Results and Discussion
4.1. Analysis of the Contact Angle Affected by the Droplet Volume
4.2. Analysis of the Surface Morphology and Roughness
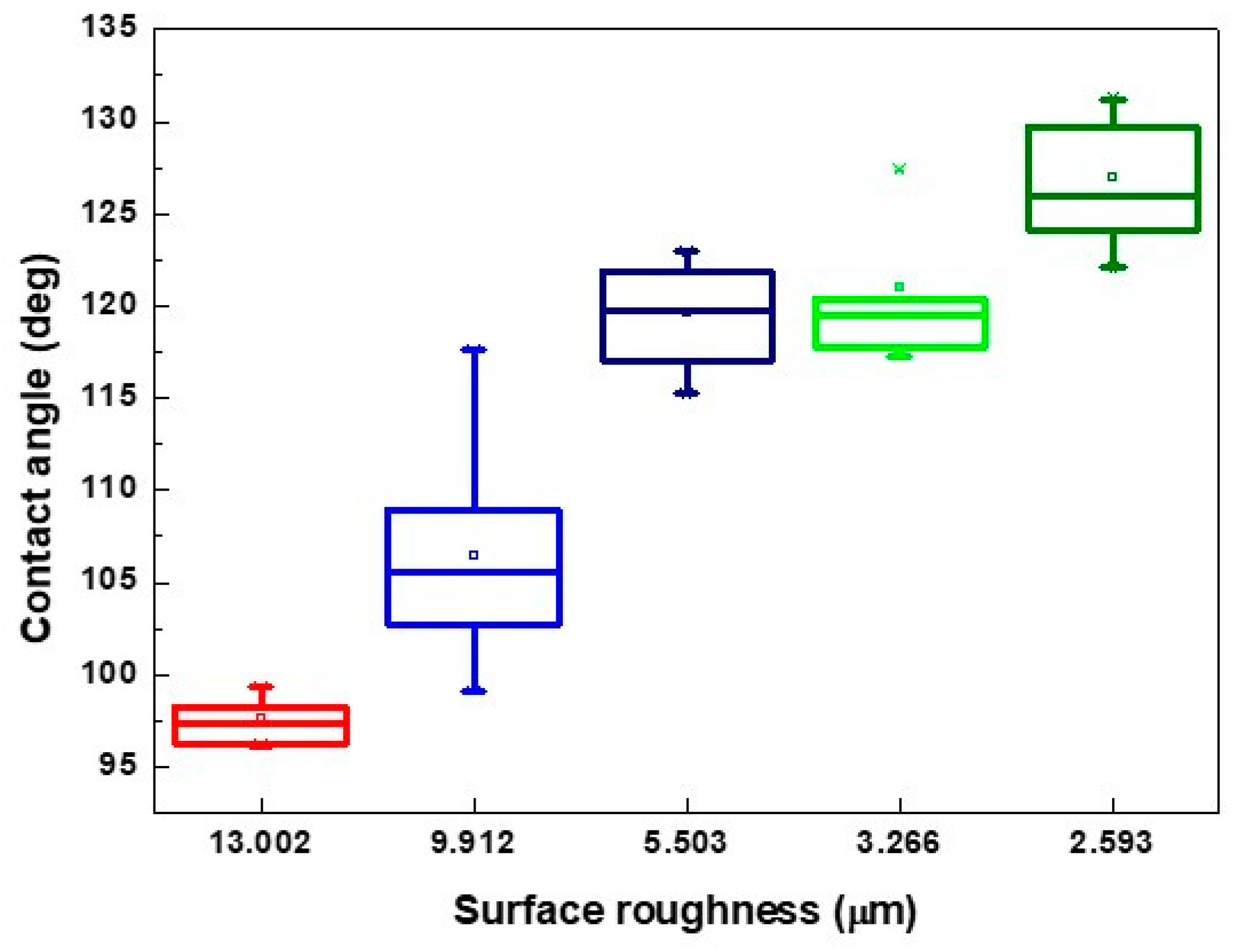
4.3. Analysis of the Contact Angle Affected by Line Pitch and Laser Scanning Speed
4.4. Analysis of the Contact Angle Affected by Oxygen Plasma
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bergenske, P.D.; Polse, K.A. The effect of rigid gas permeable lenses on corneal sensitivity. J. Am. Optom. Assoc. 1987, 58, 212–215. [Google Scholar] [PubMed]
- Tyanoudis, I.; Efyon, N. Oxygen permeability of rigid contact lens materials. J. Br. Contact Lens Assoc. 1995, 18, 49–53. [Google Scholar] [CrossRef]
- Bourassa, S.; Benjamin, W.J. RGP wettability: The first day could be the worst day! J. Br. Contact Lens Assoc. 1992, 19, 25–34. [Google Scholar] [CrossRef]
- Guillon, M.; Guillon, J.P.; Shah, D.; Bertrand, S.; Grant, T. In vivo wettability of high Dk RGP materials. J. Br. Contact Lens Assoc. 1995, 18, 9–15. [Google Scholar] [CrossRef]
- Ichijima, H.; Cavanagh, H.D. How rigid gas-permeable lenses supply more oxygen to the cornea than silicone hydrogels: A new model. Eye Contact Lens 2007, 33, 212–223. [Google Scholar] [CrossRef]
- Harmano, H.; Waranabe, K.; Hamano, T.; Mitsunaga, S.; Kotani, S.; Okada, A. A study of the complications induced by conventional and disposable contact lenses. J. Contact Lens Assoc. Ophthalmol. 1994, 20, 103–108. [Google Scholar]
- Samuel, B.; Zhao, H.; Law, K.Y. Study of Wetting and Adhesion Interactions between Water and Various Polymer and Superhydrophobic Surfaces. J. Phys. Chem. C 2011, 115, 14852–14861. [Google Scholar] [CrossRef]
- Law, K.Y. Definitions for Hydrophilicity, Hydrophobicity, and Superhydrophobicity: Getting the Basics Right. J. Phys. Chem. Lett. 2014, 5, 686–688. [Google Scholar] [CrossRef]
- Zhu, L.; Feng, Y.; Ye, X.; Zhou, Z. Tuning wettability and getting superhydrophobic surface by controlling surface roughness with well-designed microstructures. Sens. Actuators A 2006, 130, 595–600. [Google Scholar] [CrossRef]
- Jung, Y.C.; Bhushan, B. Contact angle, adhesion and friction properties of micro- and nanopatterned polymers for superhydrophobicity. Nanotechnology 2006, 17, 4970–4980. [Google Scholar] [CrossRef]
- Toosi, S.F.; Moradi, S.; Kamal, S.; Hatzikiriakos, S.G. Superhydrophobic laser ablated PTFE substrates. Appl. Surf. Sci. 2015, 349, 715–723. [Google Scholar] [CrossRef]
- Cai, Y.; Luo, X.; Liu, Z.; Qin, Y.; Chang, W.; Sun, Y. Product and process fingerprint for nanosecond pulsed laser ablated superhydrophobic surface. Micromachines 2019, 10, 177. [Google Scholar] [CrossRef] [PubMed]
- Qi, H.; Chen, T.; Yao, L.; Zuo, T. Hydrophilicity modification of poly (methyl methacrylate) by excimer laser ablation and irradiation. Microfluid Nanofluid 2008, 5, 139–143. [Google Scholar] [CrossRef]
- Marco, C.; De Eaton, S.M.; Martinez-Vazquez, R.; Rampini, S.; Cerullo, G.; Levi, M.; Turri, S.; Osellame, R. Solvent vapor treatment controls surface wettability in PMMA femtosecond-laser-ablated microchannels. Microfluid Nanofluid 2014, 14, 171–176. [Google Scholar] [CrossRef]
- Lawrence, J.; Li, L. Modification of the wettability characteristics of polymethyl methacrylate (PMMA) by means of CO2, Nd: YAG, excimer and high power diode laser radiation. Mater. Sci. Eng. A 2001, 303, 142–149. [Google Scholar] [CrossRef]
- Aono, Y.; Hirata, A.; Tokura, H. Non-textured laser modification of silica glass surface: Wettability control and flow channel formation. Appl. Surf. Sci. 2016, 371, 530–537. [Google Scholar] [CrossRef]
- Bodas, D.; Khan-Malek, C. Formation of more stable hydrophilic surface of PDMS by plasma and chemical treatments. Microelectron. Eng. 2006, 83, 1277–1279. [Google Scholar] [CrossRef]
- Tan, S.H.; Nguyen, N.T.; Chua, Y.C.; Kang, T.G. Oxygen plasma treatment for reducing hydrophobicity of a sealed polydimethysiloxane microchannel. Biomicrofluidics 2010, 4, 32204. [Google Scholar] [CrossRef]
- Du, K.; Jiang, Y.; Liu, Y.; Wathuthanthri, I.; Choi, C.H. Manipulation of superhydrophobicity of plasma-etched polymer nanostructures. Micormachines 2018, 9, 304. [Google Scholar] [CrossRef]
- Kim, M.Y.; Noh, J. Fabrication of a hydrophilic line on a hydrophobic surface by laser ablation processing. Micromachines 2018, 9, 208. [Google Scholar] [CrossRef]
- Wong, S. A review of Contact angle technique. In Contact Lens Update Clinical Insights Based in Current Research; Centre for Ocular Research & Education: Waterloo, ON, Canada, 2017. [Google Scholar]
- Cheng, L.; Muller, S.J.; Radke, C.J. Wettability of silicone-hydrogel contact lenses in the presence of tear-film components. J. Curr. Eye Res. 2004, 28, 93–108. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.C.; Svitova, T.F. Contact Lenses Wettability In Vitro: Effect of Surface-Active Ingredients. Optom. Vis. Sci. 2010, 87, 440–447. [Google Scholar] [CrossRef] [PubMed]
- Eustathopoulos, N.; Nicholas, M.G.; Drevet, B. Wettability at High Temperatures, 1st ed.; Pergamon Materials Series; Elsevier: Oxford, UK, 1999; Volume 3. [Google Scholar]
- Schrader, M.E.; Loeb, G.I. Modern Approaches to Wettability. Theory and Applications; Plenum Press: New York, NY, USA, 1992. [Google Scholar]
- Young, T. An Essay on the Cohesion of Fluids. Philos. Trans. R. Soc. Lond. 1805, 95, 65–87. [Google Scholar] [CrossRef]
- Chow, T.S. Wetting of rough surfaces. J. Phys. Condens. Matter 1998, 10, L445–L451. [Google Scholar] [CrossRef]
- Tadmor, R. Line energy and the relation between advancing, receding and Young contact angles. Langmuir 2004, 20, 7659–7664. [Google Scholar] [CrossRef]
- Schrader, M.E. Young-Dupre Revisited. Langmuir 1995, 11, 3585–3589. [Google Scholar] [CrossRef]
- Marmur, A. Wetting of Hydrophobic Rough Surfaces: To be heterogeneous or not to be. Langmuir 2003, 19, 8343–8348. [Google Scholar] [CrossRef]
- Whyman, G.; Bormashenko, E.; Stein, T. The rigorous derivation of Young, Cassie–Baxter and Wenzel equations and the analysis of the contact angle hysteresis phenomenon. Chem. Phys. Lett. 2008, 450, 355–359. [Google Scholar] [CrossRef]
- Ishino, C.; Okumura, K. Wetting transitions on textured hydrophilic surfaces. Eur. Phys. J. E 2008, 25, 415–424. [Google Scholar] [CrossRef] [PubMed]
- Bico, J.; Thiele, U.; Quéré, D. Wetting of textured surfaces. Colloids Surf. A Phys. Eng. Asp. 2002, 206, 41–46. [Google Scholar] [CrossRef]
- Yuan, Y.; Lee, T.R. Contact angle and wetting properties. Surf. Sci. Technol. 2003, 51, 3–34. [Google Scholar]
- Domínguez-Vincent, A.; Esteve-Taboada, J.J.; Ferrer-Blasco, T.; García-Lázaro, S.; Montés-Micó, R. Optical quality comparison among different Boston contact lens materials. Clin. Exp. Optom. 2016, 99, 39–46. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | Droplet Volume (μL) | |||
|---|---|---|---|---|
| 2 | 3 | 4 | 5 | |
| Without mesh patterns | 121 ± 6.1 | 118 ± 3.4 | 112 ± 3.5 | 104 ± 8.9 |
| With patterns of line pitch 30 μm | 118 ± 6.5 | 111 ± 8.7 | 114 ± 7.4 | 110 ± 6.2 |
| Pattern | Droplet Volume (μL) | |||
|---|---|---|---|---|
| 2 | 3 | 4 | 5 | |
| Without mesh patterns | 2.08 ± 0.14 | 2.35 ± 0.14 | 2.62 ± 0.10 | 2.98 ± 0.29 |
| With patterns of line pitch 30 μm | 2.14 ± 0.17 | 2.53 ± 0.13 | 2.55 ± 0.14 | 2.77 ± 0.15 |
| Scanning Speed (mm/s) | Line Pitch (μm) | ||||
|---|---|---|---|---|---|
| 30 | 50 | 70 | 90 | 110 | |
| 500 | 13.002 | 9.912 | 5.503 | 2.593 | 3.266 |
| 1000 | 6.032 | 2.698 | 2.642 | 2.797 | 2.507 |
| 1500 | 2.747 | 2.678 | 2.767 | 2.276 | 2.478 |
| 2000 | 2.230 | 2.885 | 2.506 | 2.781 | 2.754 |
| Scanning Speed (mm/s) | Line Pitch (μm) | ||||
|---|---|---|---|---|---|
| 30 | 50 | 70 | 90 | 110 | |
| 500 | 18.770 | 13.215 | 8.300 | 3.569 | 4.222 |
| 1000 | 7.989 | 3.689 | 3.573 | 3.752 | 3.391 |
| 1500 | 3.894 | 3.631 | 3.727 | 3.089 | 3.352 |
| 2000 | 3.081 | 3.856 | 3.409 | 3.762 | 3.682 |
| Oxygen Plasma Treatment | Pattern | |
|---|---|---|
| Without | Line Pitch of 30 μm | |
| Before | 118.03 ± 2.59 | 97.58 ± 1.29 |
| after 1 h | 36.22 ± 4.41 | 36.82 ± 2.28 |
| after 110 h | 101.18 ± 1.50 | 55.82 ± 3.13 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, H.-Y.; Hsieh, Y.-C.; Lin, Y.-H.; Chang, H.-C.; Tang, Y.-H.; Huang, K.-C. Fabrication of Hydrophilic Surface on Rigid Gas Permeable Contact Lenses to Enhance the Wettability Using Ultraviolet Laser System. Micromachines 2019, 10, 394. https://doi.org/10.3390/mi10060394
Tsai H-Y, Hsieh Y-C, Lin Y-H, Chang H-C, Tang Y-H, Huang K-C. Fabrication of Hydrophilic Surface on Rigid Gas Permeable Contact Lenses to Enhance the Wettability Using Ultraviolet Laser System. Micromachines. 2019; 10(6):394. https://doi.org/10.3390/mi10060394
Chicago/Turabian StyleTsai, Hsin-Yi, Yu-Chen Hsieh, Yu-Hsuan Lin, Han-Chao Chang, Yu-Hsiang Tang, and Kuo-Cheng Huang. 2019. "Fabrication of Hydrophilic Surface on Rigid Gas Permeable Contact Lenses to Enhance the Wettability Using Ultraviolet Laser System" Micromachines 10, no. 6: 394. https://doi.org/10.3390/mi10060394
APA StyleTsai, H.-Y., Hsieh, Y.-C., Lin, Y.-H., Chang, H.-C., Tang, Y.-H., & Huang, K.-C. (2019). Fabrication of Hydrophilic Surface on Rigid Gas Permeable Contact Lenses to Enhance the Wettability Using Ultraviolet Laser System. Micromachines, 10(6), 394. https://doi.org/10.3390/mi10060394