2.1. Basic Structure
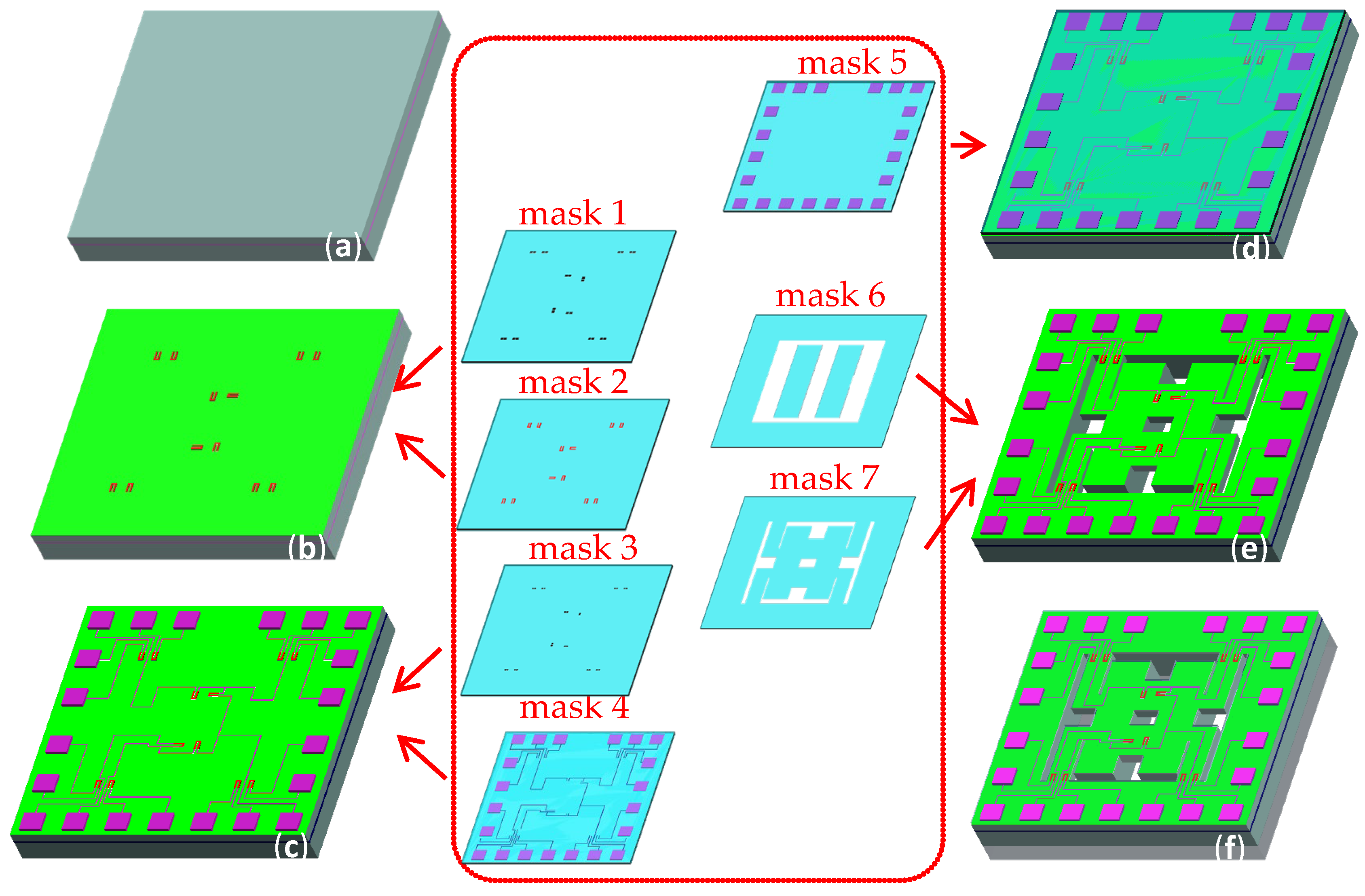
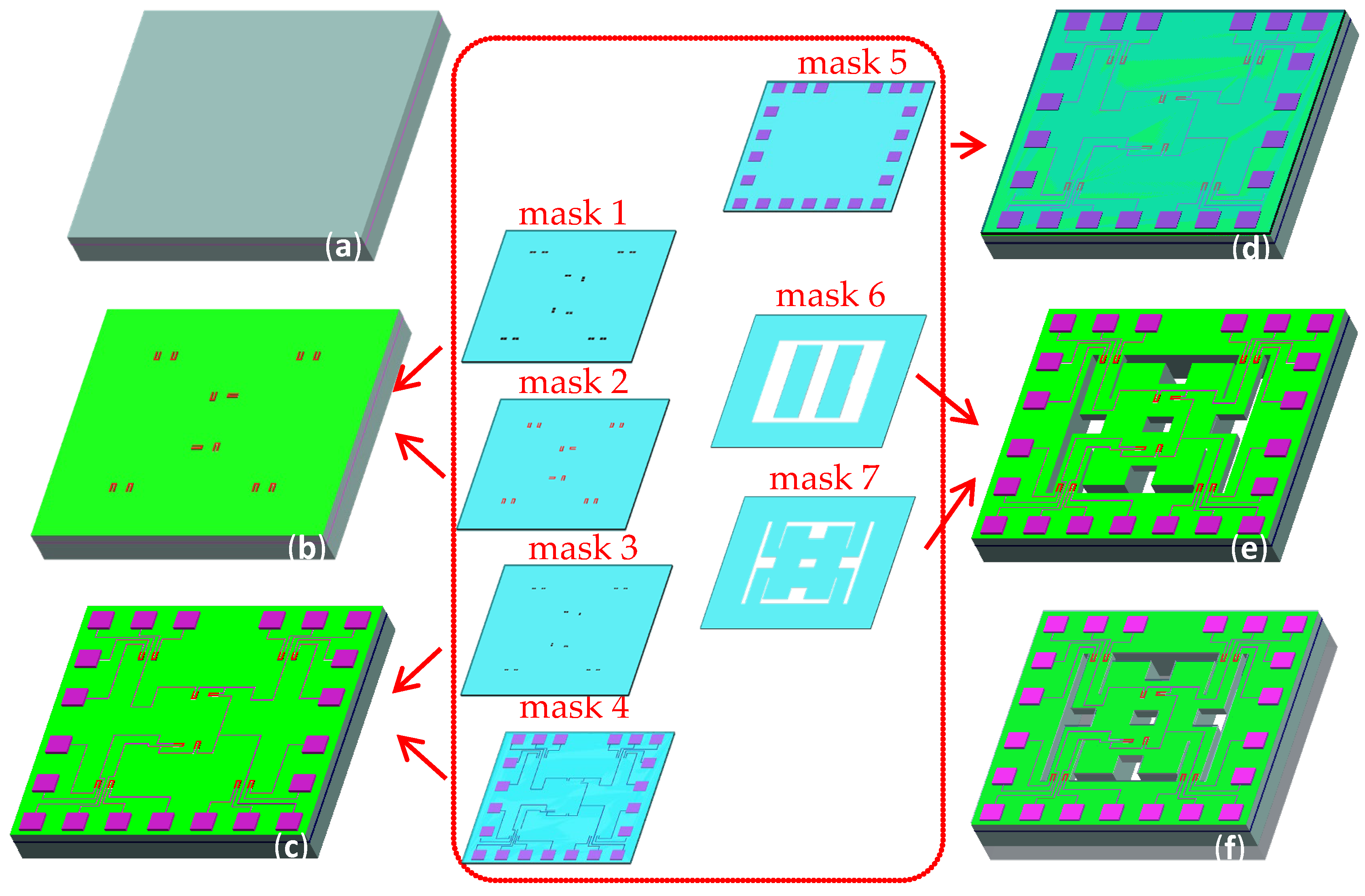
To easily release the structure of beams and better control the thickness of the beams by using the self-stop technology of inductively-coupled plasma (ICP) etching technology, a SOI wafer was utilized as a substrate of the proposed three-axis acceleration sensor.
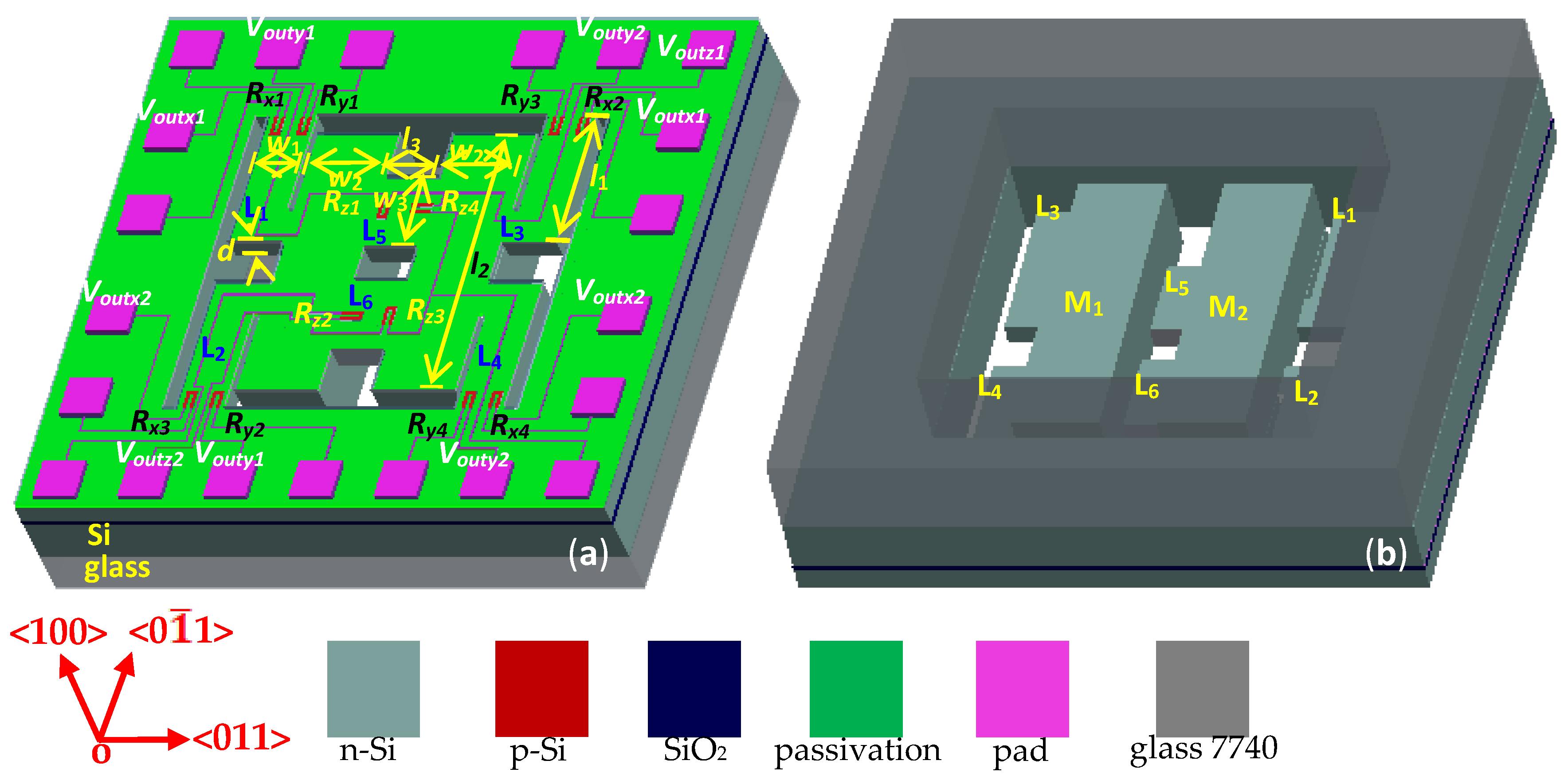
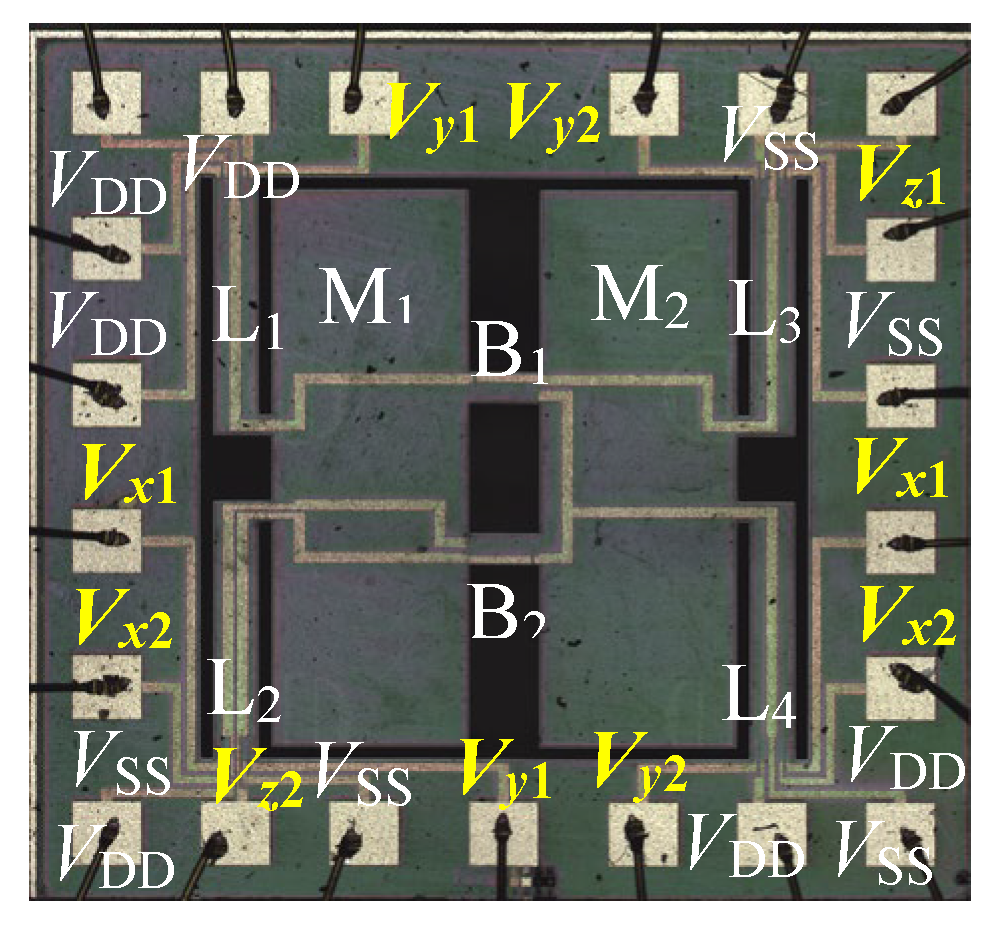
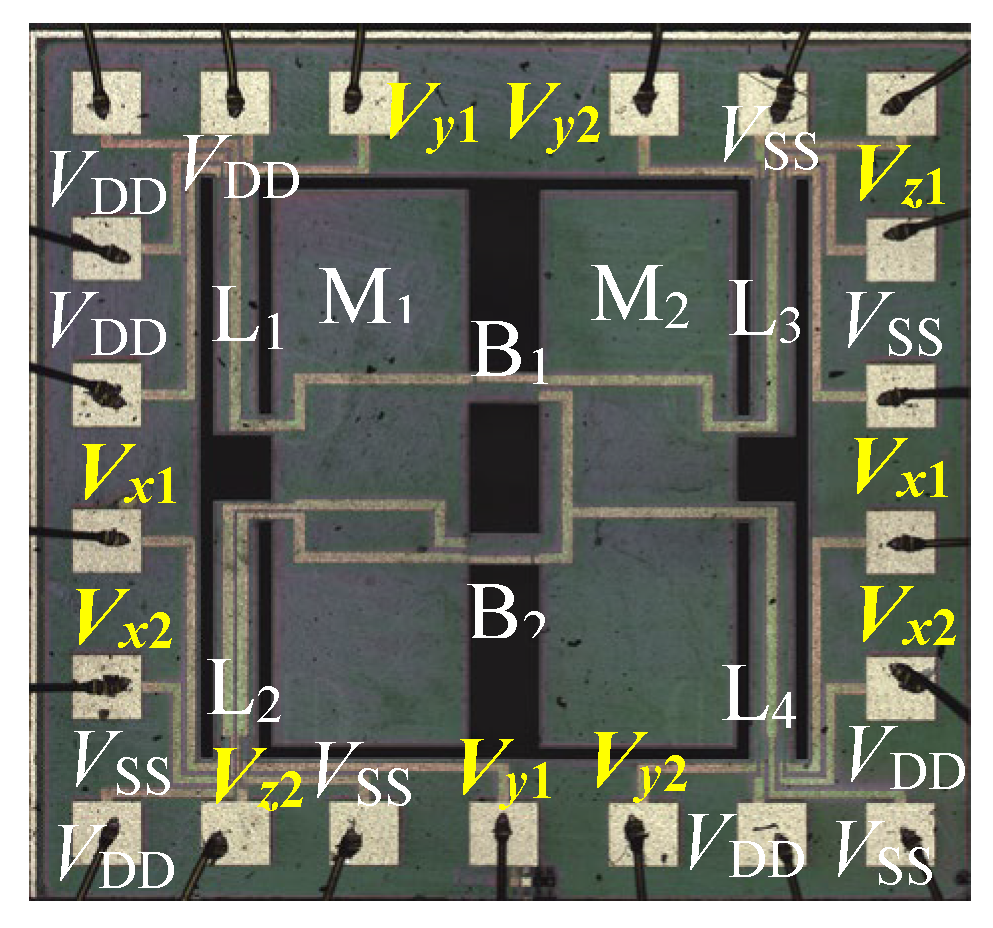
Figure 1a,b show the top and back views of the SOI three-axis acceleration sensor, respectively. The chip is composed of an elastic structure and a piezo-sensitive element as shown in
Figure 1a, where the elastic structure includes four L-shaped beams (L
1, L
2, L
3, and L
4) and an intermediate double beam (L
5 and L
6).
l1 (1200 μm) and
w1 (200 μm) are the length and the width of the L-shaped beams for the proposed sensor, respectively.
l3 (300 μm) and
w3 (150 μm) are the length and the width of the double beams, respectively.
d (100 μm) is the thicknesses of the L-shaped beams (L
1, L
2, L
3, L
4, L
5, and L
6), named
dL1,
dL2,
dL3,
dL4,
dL5, and
dL6, respectively.
l2 (2600 μm) and
w2 (850 μm) are the length and the width of the two masses. Twelve piezoresistors are exploited as the sensitive elements, where the four piezoresistors (
Rx1,
Rx2,
Rx3, and
Rx4) far away from the mass were fabricated at the roots of L-shape beams (L
1, L
2, L
3, and L
4) to form the first Wheatstone bridge (
Wx). Meanwhile, the four piezoresistors (
Ry1,
Ry2,
Ry3, and
Ry4) close to the mass were fabricated at the roots of L-shaped beams (L
1, L
2, L
3, and L
4) to construct the second Wheatstone bridge (
Wy), and the other piezoresistors (
Rz1,
Rz2,
Rz3, and
Rz4) at the roots of the double beams (L
5, L
6) form the third Wheatstone bridge (
Wz) in response.
Wx,
Wy, and
Wz are used to measure the acceleration along
x-axis,
y-axis, and
z-axis (
ax,
ay, and
az), respectively. Based on that, through analyzing the effect of conduction type and doping concentration on piezoresistive coefficient, the piezoresistors were selected as p-Si, and its resistivity was designed in the range of 0.01 to 0.1 Ω·cm.
To realize a free movement of the middle double masses in the space, the back side of the chip was bonded with a glass sheet with a hole in the middle by using bonding technology, as shown in
Figure 1b.
2.2. Theoretical Analysis of Sensing Principle
To study the sensing principle of the chip under different accelerations, theoretical analysis was presented based on piezoresistive effect. In the condition of stress, the relative variation of the silicon piezoresistor along the same crystal orientation can be expressed as [
14]
where
is the variation of the piezoresistor.
R0 is the value of the piezoresistor without stress.
and
are the longitudinal and the lateral piezoresistive coefficients, respectively.
and
are the longitudinal and the lateral stresses, respectively.
From Equation (1), we can see that the main factors to influence
include piezoresistive coefficients (
and
) and stresses (
and
). Due to the silicon belongs to the cubic crystal system, the piezoresistive coefficient along any crystal orientation can be expressed as [
14,
15]
where
and
are the longitudinal and the lateral piezoresistive coefficients along the crystal axis orientation, respectively.
is the shear piezoresistive coefficient.
,
and
are the cosine of the piezoresistor’s longitudinal orientation.
,
and
are the cosine of the piezoresistor’s lateral orientation.
As shown in Equation (2), it can be found that the piezoresistive coefficients of silicon along different orientations are different from each other. As is well-known, the piezoresistive coefficient of p-Si is better than that of n-Si. According to theoretical analysis, the and on the (100) plane of p-Si are positive and negative, respectively, i.e., along is and along is . Thus, it is possible to obtain a maximum piezoresistive coefficient. Based on the above analysis, the piezoresistors were designed along and orientations.
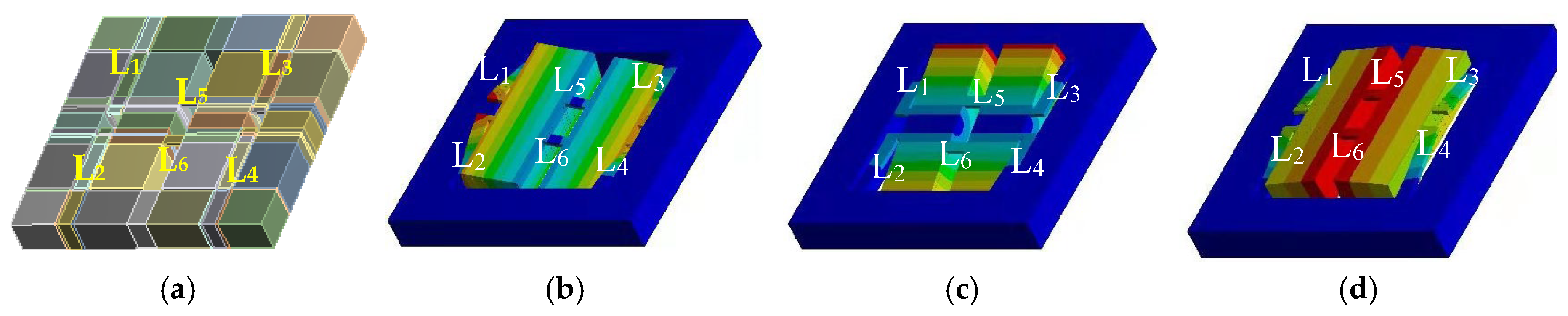
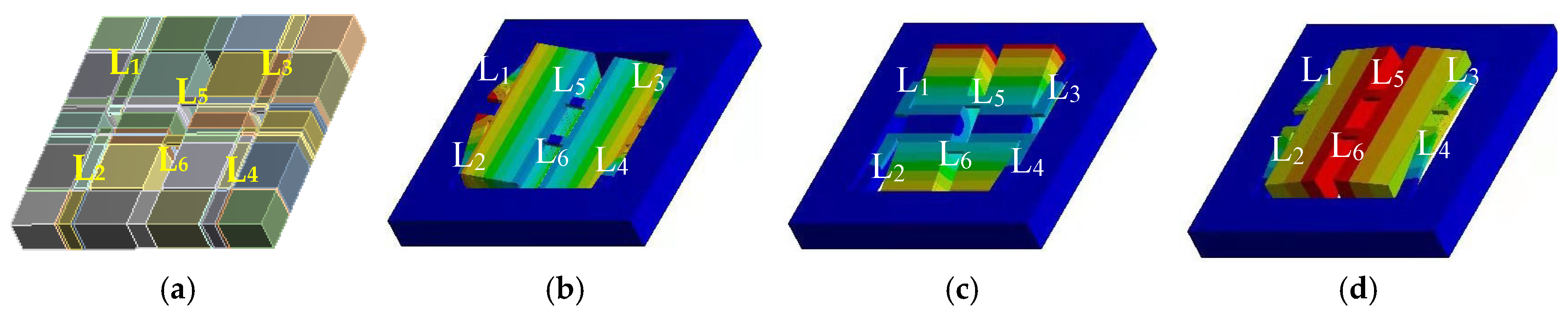
To analyze the working principle of the chip, a simulation model was built by using ANSYS finite element software. Based on this model, the effects of acceleration on the deformations of the L-shaped beams and the middle double beams were investigated.
Figure 2 shows the deformation diagrams of the beams in the condition of
a = 0 g,
a =
ax,
a =
ay, and
a =
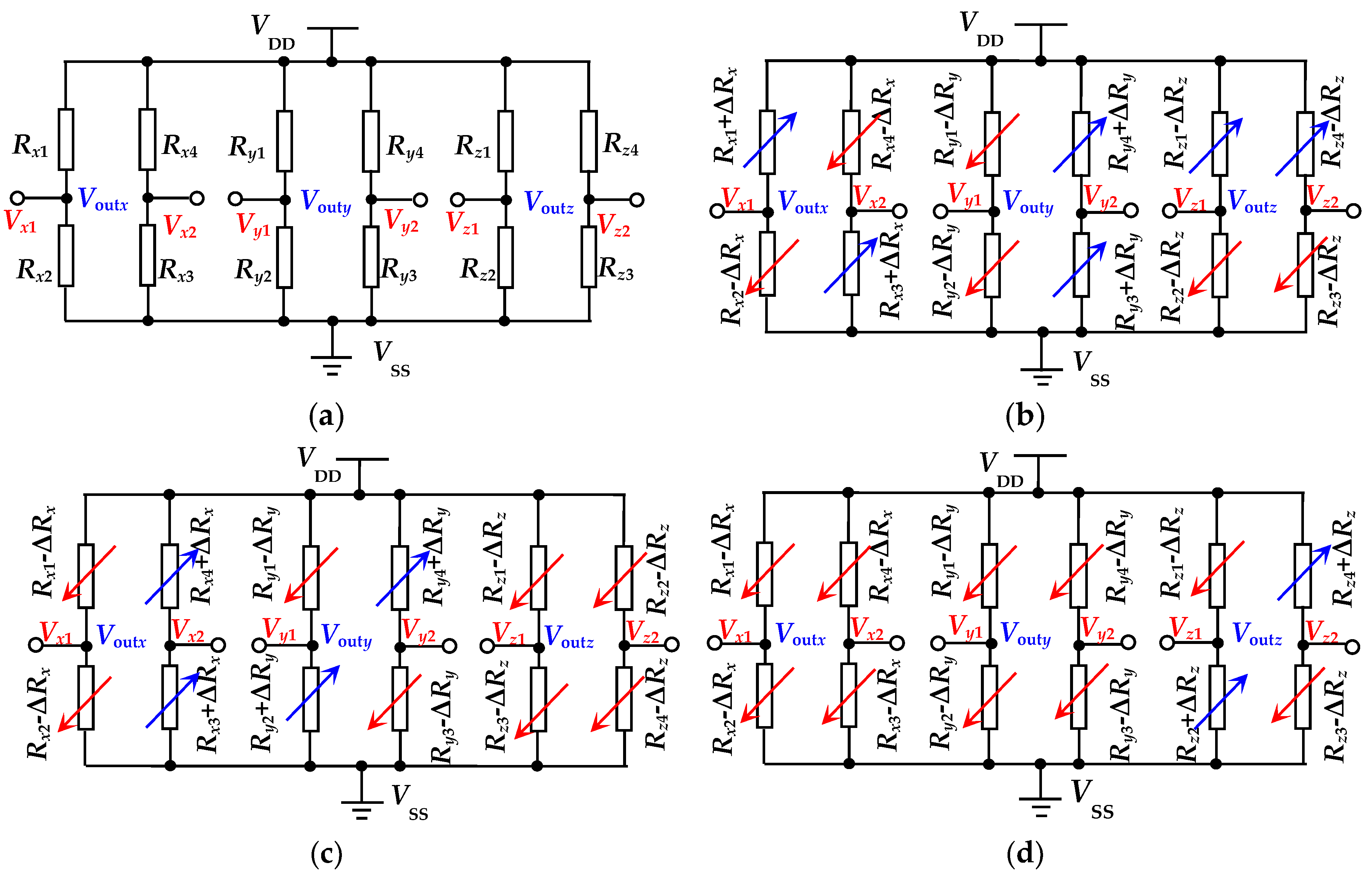
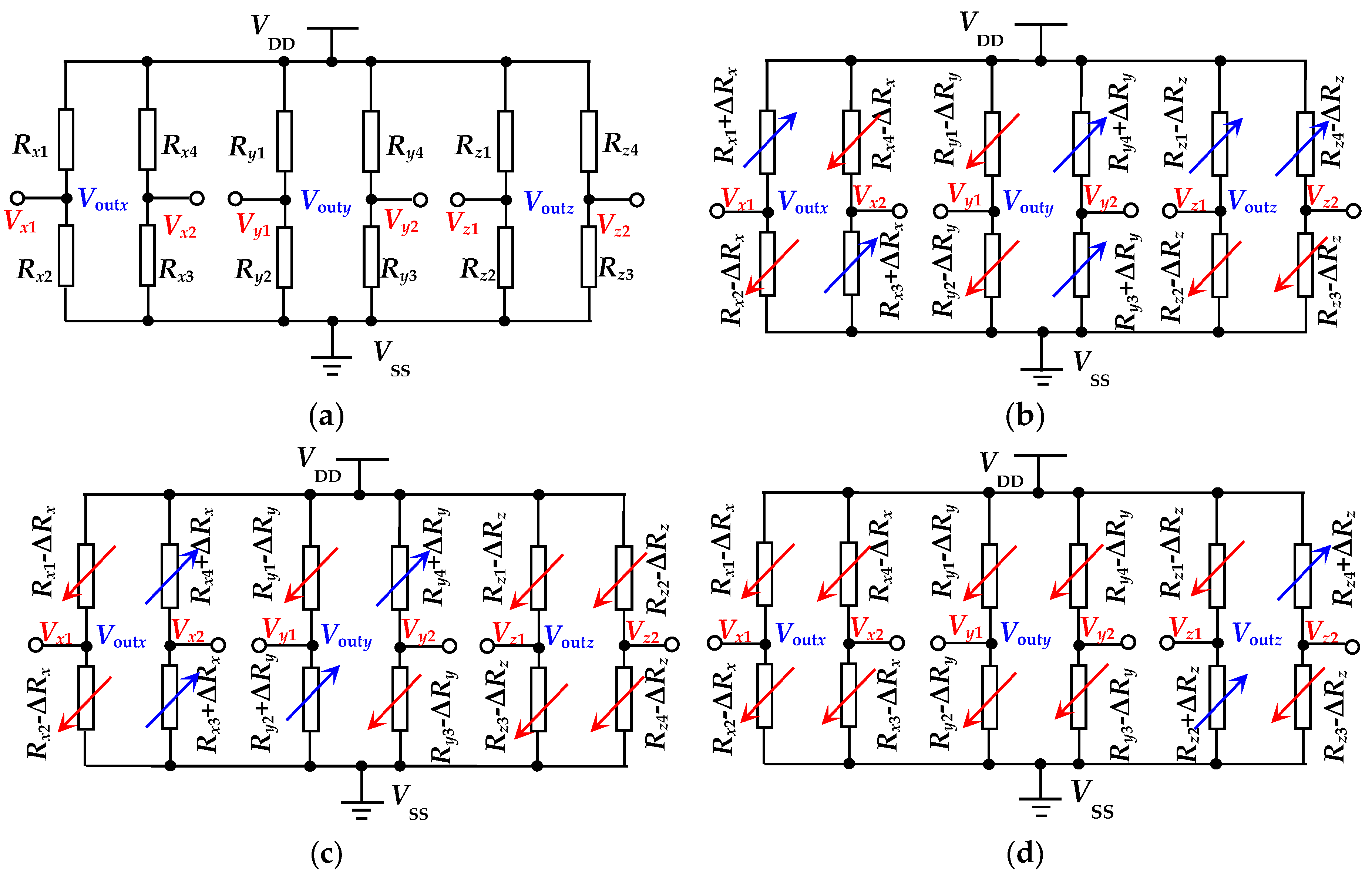
az, respectively. To further analyzing the sensing characteristics of the acceleration sensor, twelve piezoresistors on the beams are equivalent to three Wheatstone bridge circuits, with an equivalent circuit diagram under the action of
a = 0 g,
a =
ax,
a =
ay, and
a =
az, respectively, as shown in
Figure 3.
In an ideal case, no deformation exhibits in the structure of the proposed sensor under no acceleration along
x-axis,
y-axis, and
z-axis, leading to an equal resistance value of the twelve piezoresistors and no output of
Voutx,
Vouty, and
Voutz for the three Wheatstone bridges, as shown in
Figure 3a. According to Newton’s second law, the two masses would cause a displacement along
x-axis under the action of
ax when applying acceleration along
x-axis as shown in
Figure 3b. As a result, the two L-shaped beams (L
1 and L
2) were squeezed and the other two L-shaped beams (L
3 and L
4) were stretched, as shown in
Figure 2b. The deformation of L-shaped beams causes a different stress distribution at the roots of beams, resulting in the increase of
Rx1,
Rx3,
Ry3, and
Ry4 and the decrease of
Rx2,
Rx4,
Ry1,
Ry2,
Rz1,
Rz2,
Rz3, and
Rz4 based on the elastic theory and piezoresistive effect [
16,
17], as shown in
Figure 3b. In view of the change of
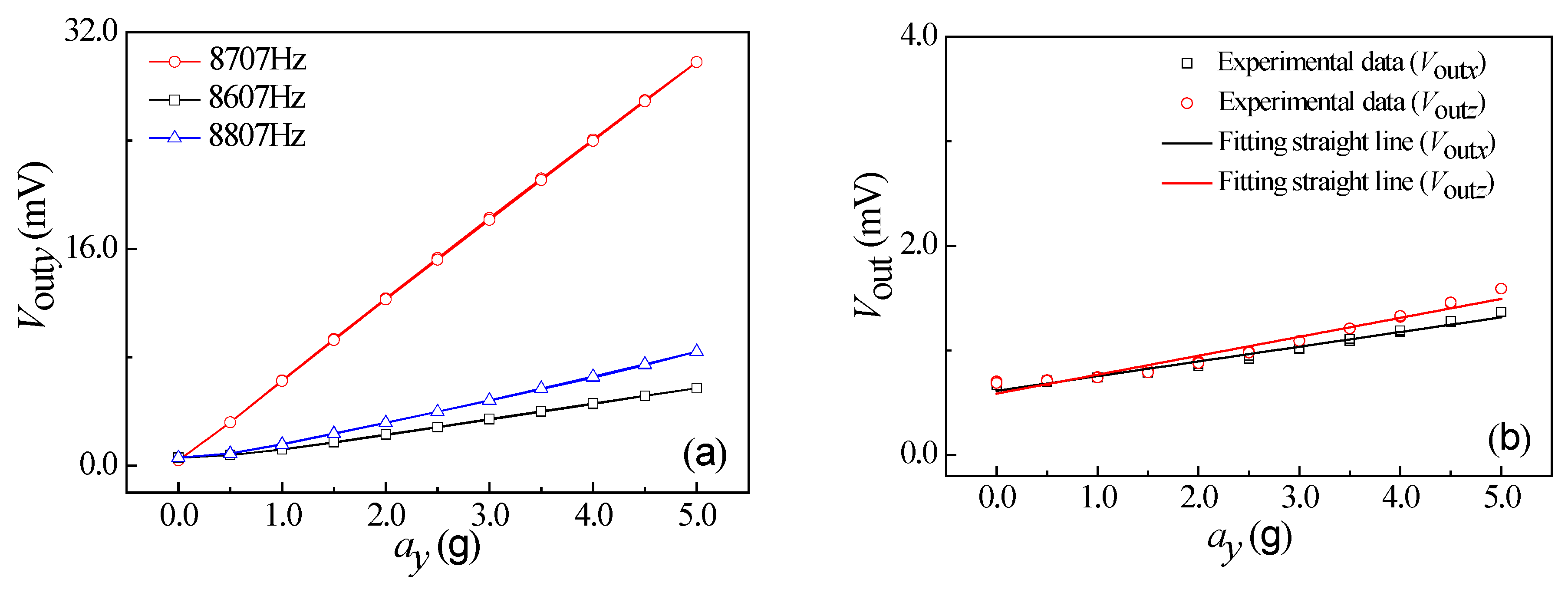
Voutx with the external acceleration,
ax can be measured. In response, L
1 and L
3 were squeezed and L
2 and L
4 were stretched under the action of
ay for the chip shown in
Figure 2c; the different stress distributions at the roots of beams would cause the increase of
Rx3,
Rx4,
Ry2, and
Ry4 and the decrease of
Rx1,
Rx2,
Ry1,
Ry3,
Rz1,
Rz2,
Rz3, and
Rz4, as shown in
Figure 3c. From the change of
Vouty with the external acceleration,
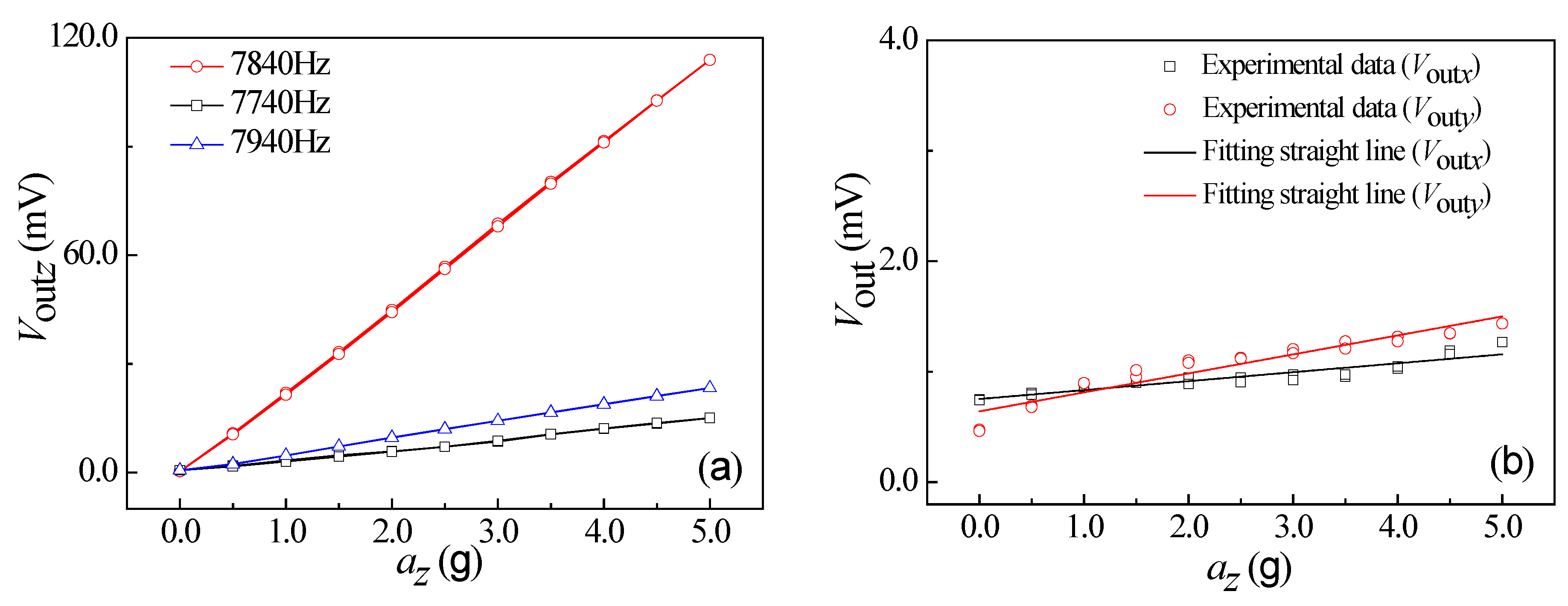
ay can be measured. When
az is applied, the middle double masses would form a displacement along
z-axis under the action of
az, as shown in
Figure 2d, resulting in the four L-shaped beams (L
1, L
2, L
3, and L
4) to be squeezed or stretched at the same time, and intermediate double beams (L
5 and L
6) to be bent under an external force. Since the combined actions of
Rz1 and
Rz3 acting as longitudinal resistances, and
Rz2 and
Rz4 acting as lateral resistances, it is inevitable that a reduction in
Rz1 and
Rz3 as well as increase in
Rz2 and
Rz4 will occur, as shown in
Figure 3d. According to the
Voutz changes with the external acceleration, which depends on the stress distribution on double beams (L
5 and L
6) and the resistance changes of
z-axis’s piezoresistors caused by the middle double beam deformations, it is possible to achieve the measurement of
az.
Based on the piezoresistive effect and the above equivalent circuit analysis, the relationship between output voltage (
Voutx,
Vouty and
Voutz) and relative variation of piezoresistors can be expressed as Equation (3):
where
Voutx,
Vouty, and
Voutz are the output voltages of the three Wheatstone bridges along the
x-axis,
y-axis, and
z-axis, respectively.
VDD is the supply voltage and
R0 is the resistance value of the piezoresistor under no external acceleration. In an ideal case, Δ
Rx, Δ
Ry, and Δ
Rz are the variations of piezoresistors along
x-axis (
Rx1,
Rx2,
Rx3, and
Rx4),
y-axis (
Ry1,
Ry2,
Ry3, and
Ry4) and
z-axis (
Rz1,
Rz2,
Rz3, and
Rz4), respectively.
Under no accelerations along x-axis, y-axis, and z-axis, ΔRx, ΔRy, and ΔRz are equal to zero, resulting in no output of Voutx, Vouty, and Voutz. Nevertheless, the absolute values of ΔRx, ΔRy, and ΔRz are approximately equal under the action of acceleration along x-axis, y-axis, or z-axis, ideally contributing to the same values of Voutx, Vouty, and Voutz for the proposed sensor.
Based on the above theoretical analysis, it is possible to realize the measurement of accelerations along
x-axis,
y-axis, and
z-axis by using the proposed sensor. According to the definition of sensitivity and Equation (4), when applying acceleration to the sensor, the output voltages can be expressed as
where
ax,
ay, and
az are the components of acceleration along
x-axis,
y-axis, and
z-axis, respectively.
Sxx,
Syy, and
Szz are the sensitivities along
x-axis,
y-axis, and
z-axis, respectively.
Sxy and
Sxz are the
x-axis cross-axis sensitivity under the actions of
ay and
az, respectively.
Syx and
Syz are the
y-axis cross-axis sensitivity under the actions of
ax and
az, respectively.
Szx and
Szy are the cross-axis sensitivity of
z-axis under
ax and
az, respectively.
2.3. Simulation Analysis of Sensing Principle
To analyze the sensitive characteristics and the cross-interference of sensitivity, a sensitive element simulation model of the proposed sensor was installed by using ANSYS finite element simulation software. According to Equation (1), i.e., the relative variation of piezoresistors is proportional to the stress acted, every acceleration in
x,
y, and
z directions has similar behaviors associated with measurement principle, and only one of them in the three directions is needed for detailed measurement. In order to investigate the stress distributions of the four piezoresistors (
Ry1,
Ry2,
Ry3, and
Ry4) at the roots of L-shaped beams, the
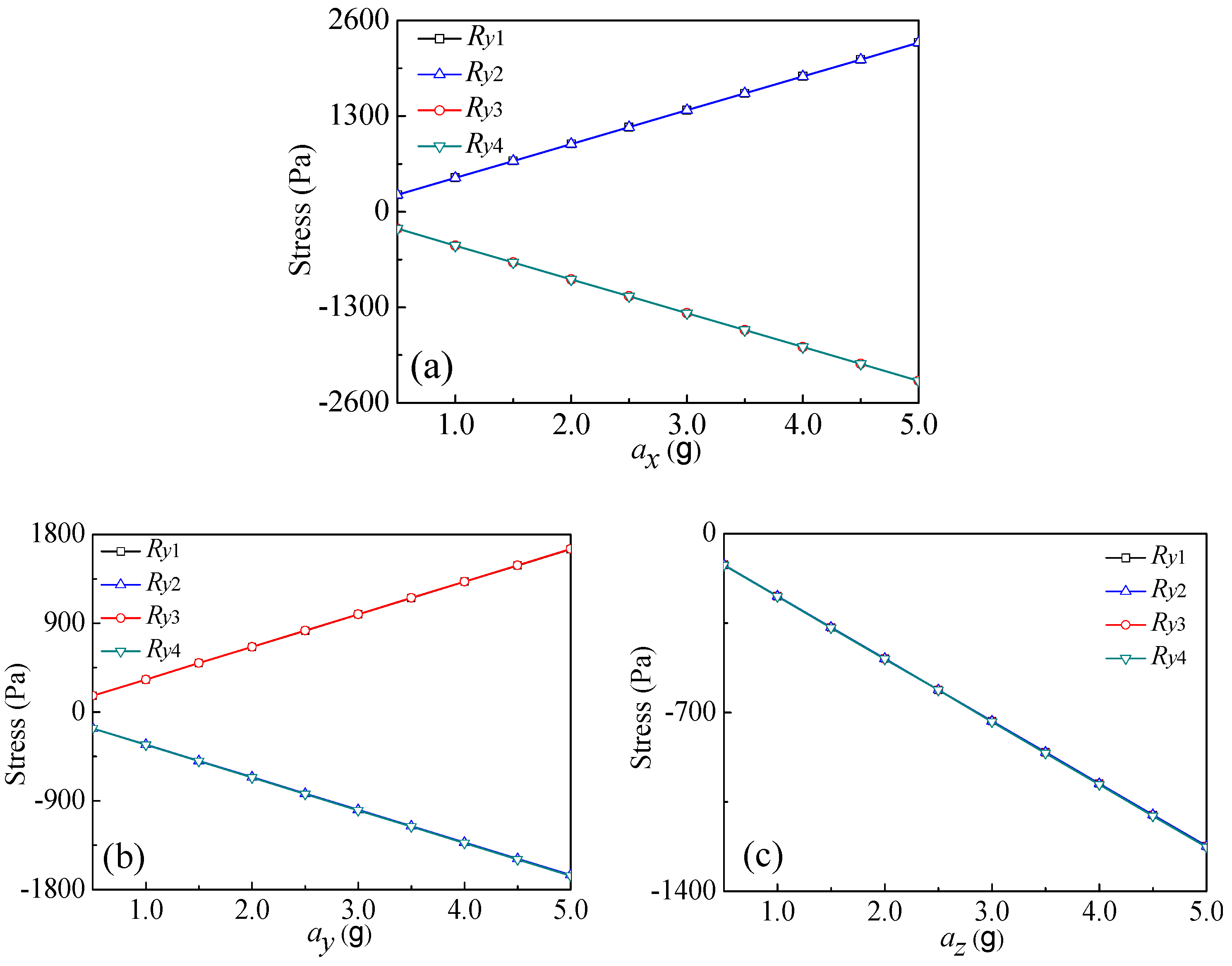
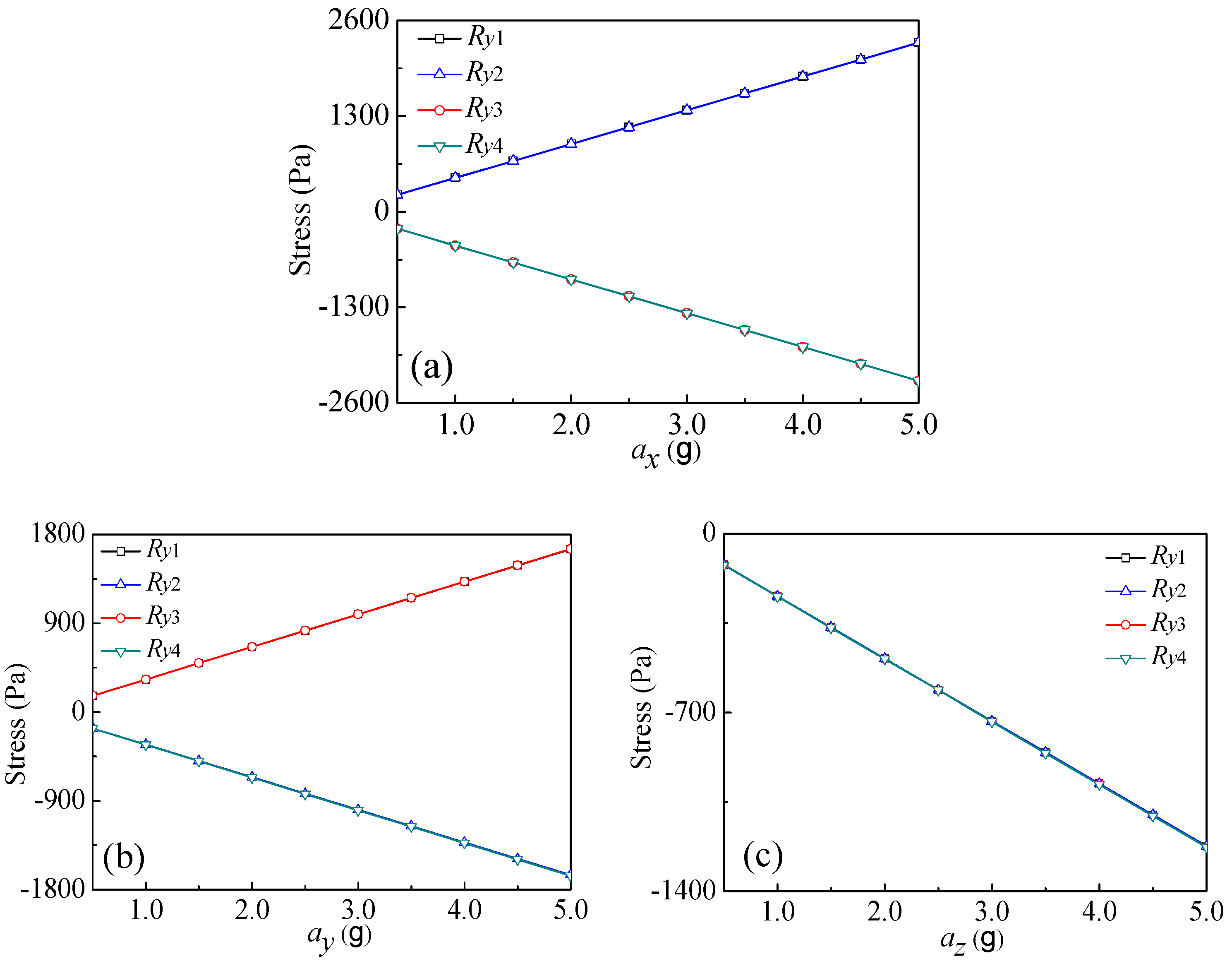
y-axis acceleration taken as example was tested by using the resulted sensitive element.
Figure 4 shows the relationship curves between the max stress values along the analysis path of four piezoresistors and
ax,
ay, and
az, respectively.
The analysis results indicate that when applying
ay to the chip, displacements of the two masses would be caused based on Newton’s second law. As shown in
Figure 4b, the roots of L
1 and L
3 exhibit negative stresses due to the above squeezing, in contrast, the roots of L
2 and L
4 display positive stresses caused by the above stretching, but both with an approximate equal absolute value of the stresses at the roots. In the ideal case, when applying
ay to the chip,
Vouty increases with the increase of
ay, as shown in
Figure 3c. Since L
1 and L
2 are squeezed and L
3 and L
4 are stretched under the action of
ax, the resulted deformations lead to the positive stresses exhibiting at the roots of L
1 and L
2, also causing the equal negative stress existing at the roots of L
3 and L
4, as shown in
Figure 4a. In the ideal condition, the
y-axis cross-sensitivity (
Syx) is ignorable under the action of
ax, as shown in
Figure 3b. However, all of L
1, L
2, L
3, and L
4 are stretched when applying
az to the chip, with approximately equal negative stresses at the roots of the four beams as shown in
Figure 4c. From
Figure 3d, the
y-axis cross-sensitivity (
Syz) can be ignored under the action of
az.
In order to reduce the effects of different beams thicknesses on the characteristics of the proposed sensor, a SOI wafer was used as the substrate of chip and MEMS technology was utilized to realize an accurate controlling of beams thicknesses. When applying acceleration along the
z-axis, it is possible to form constant output voltages of the proposed sensor along
x-axis and
y-axis directions but no cross-sensitivity (
Sxz and
Syz) due to the same deformations of the four L-shaped beams and the equal variations of the piezoresistors along
x-axis and
y-axis. Similarly, the cross-sensitivity (
Syx,
Szx,
Szy, and
Sxy) equals zero, and the output voltages can be expressed as Equation (5).
Though above design, the proposed sensor is possible to realize the measurement of acceleration along three-axis. The simulation result indicates that it is possible to improve the sensitive characteristics and reduce the sensitivity cross-interference.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}