A High Sensitive Flexible Pressure Sensor Designed by Silver Nanowires Embedded in Polyimide (AgNW-PI)




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
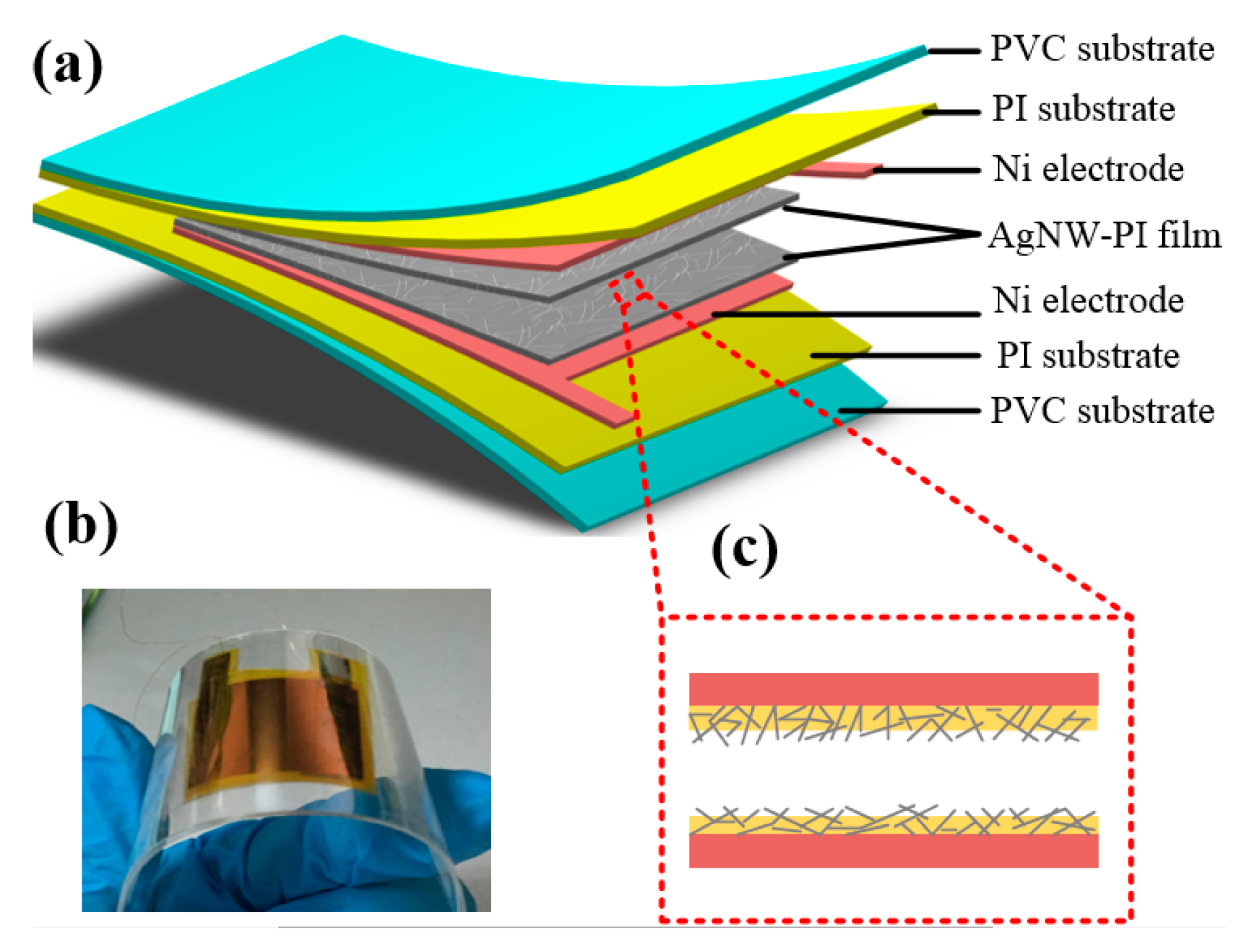
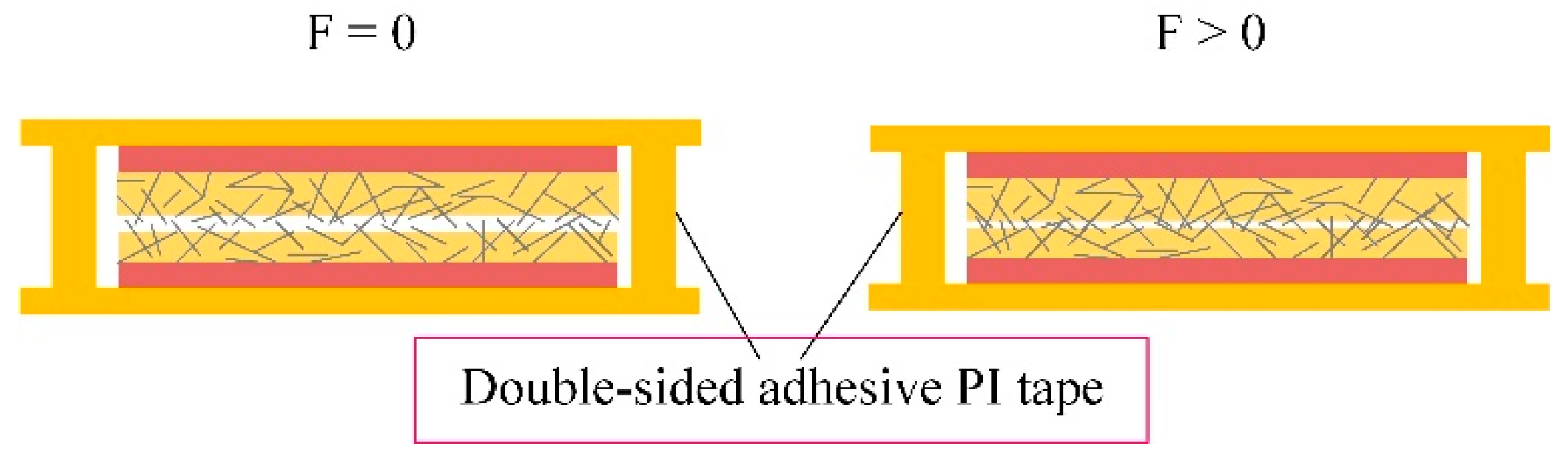
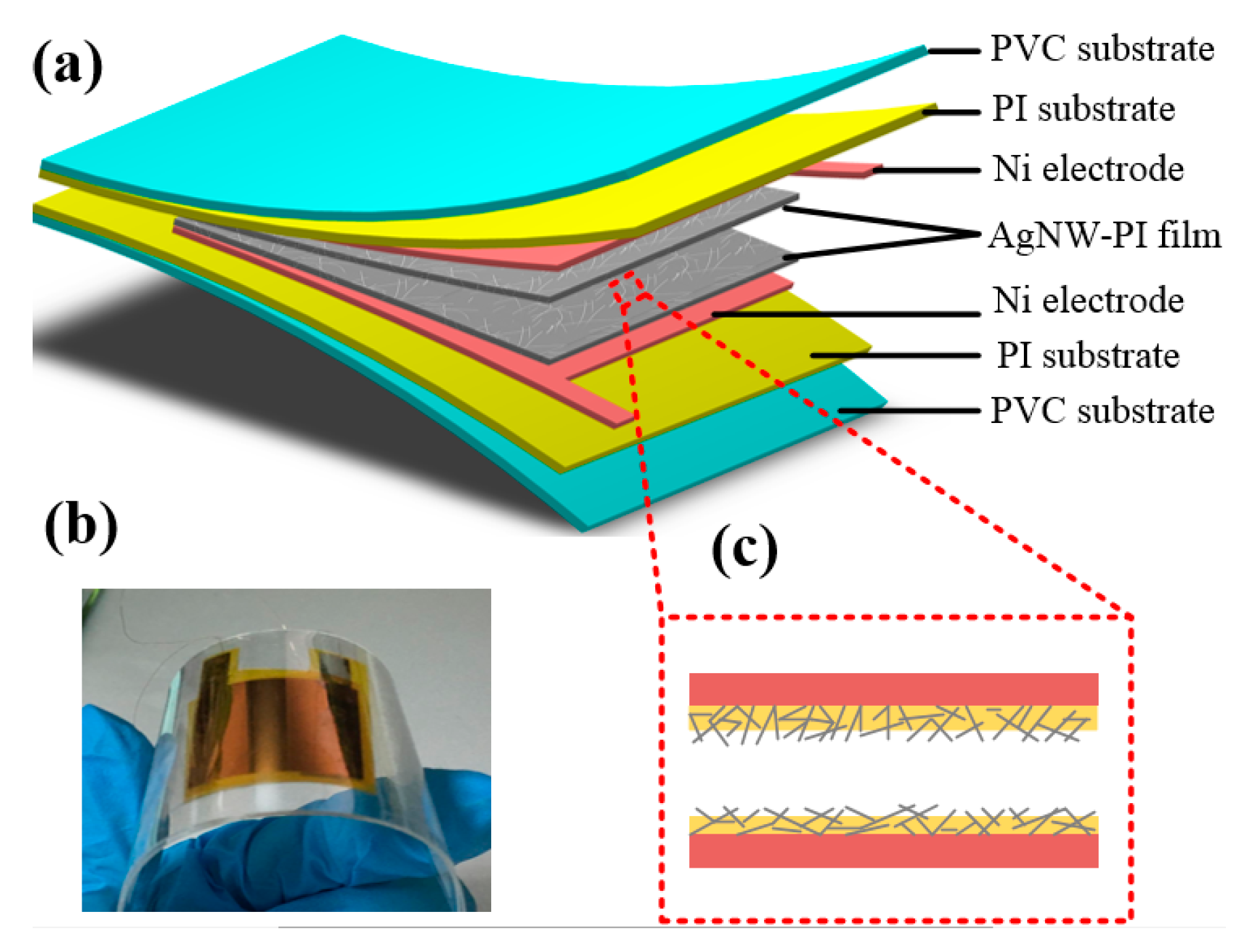
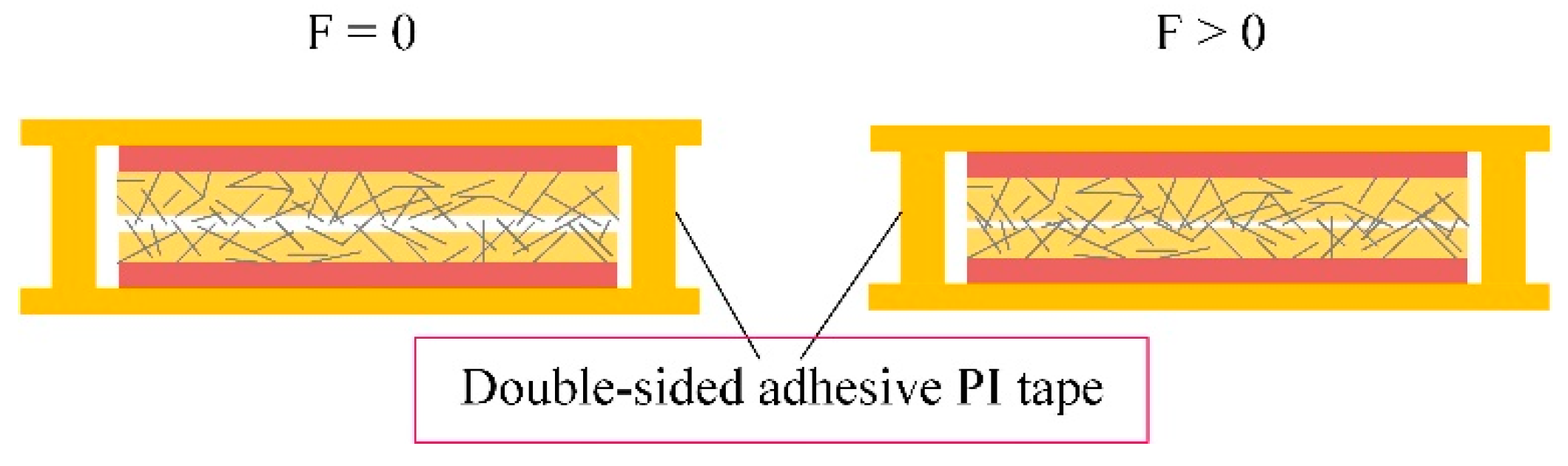
2. Design and Operational Principles
3. Materials and Methods
3.1. Materials and Fabrication Process
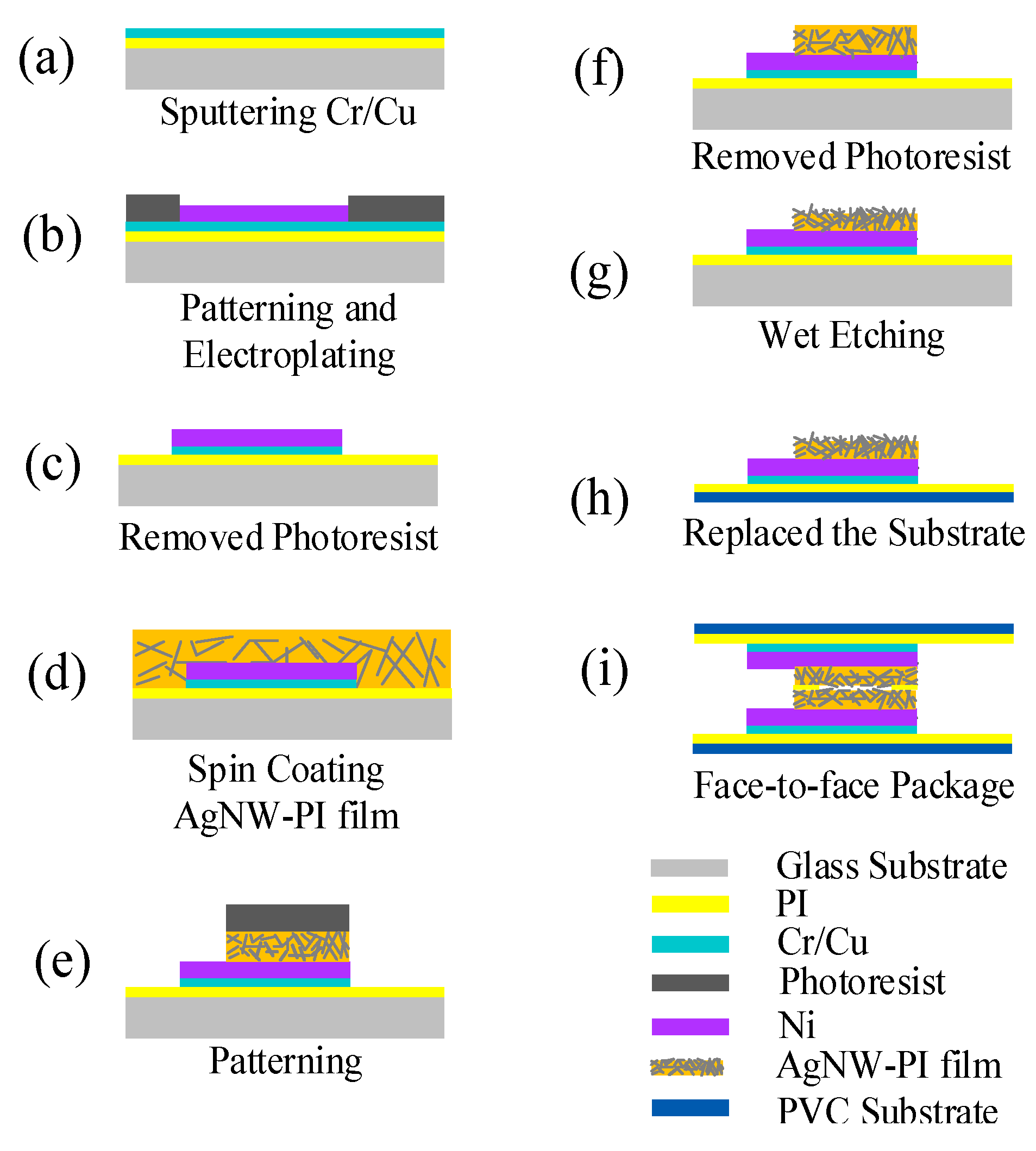
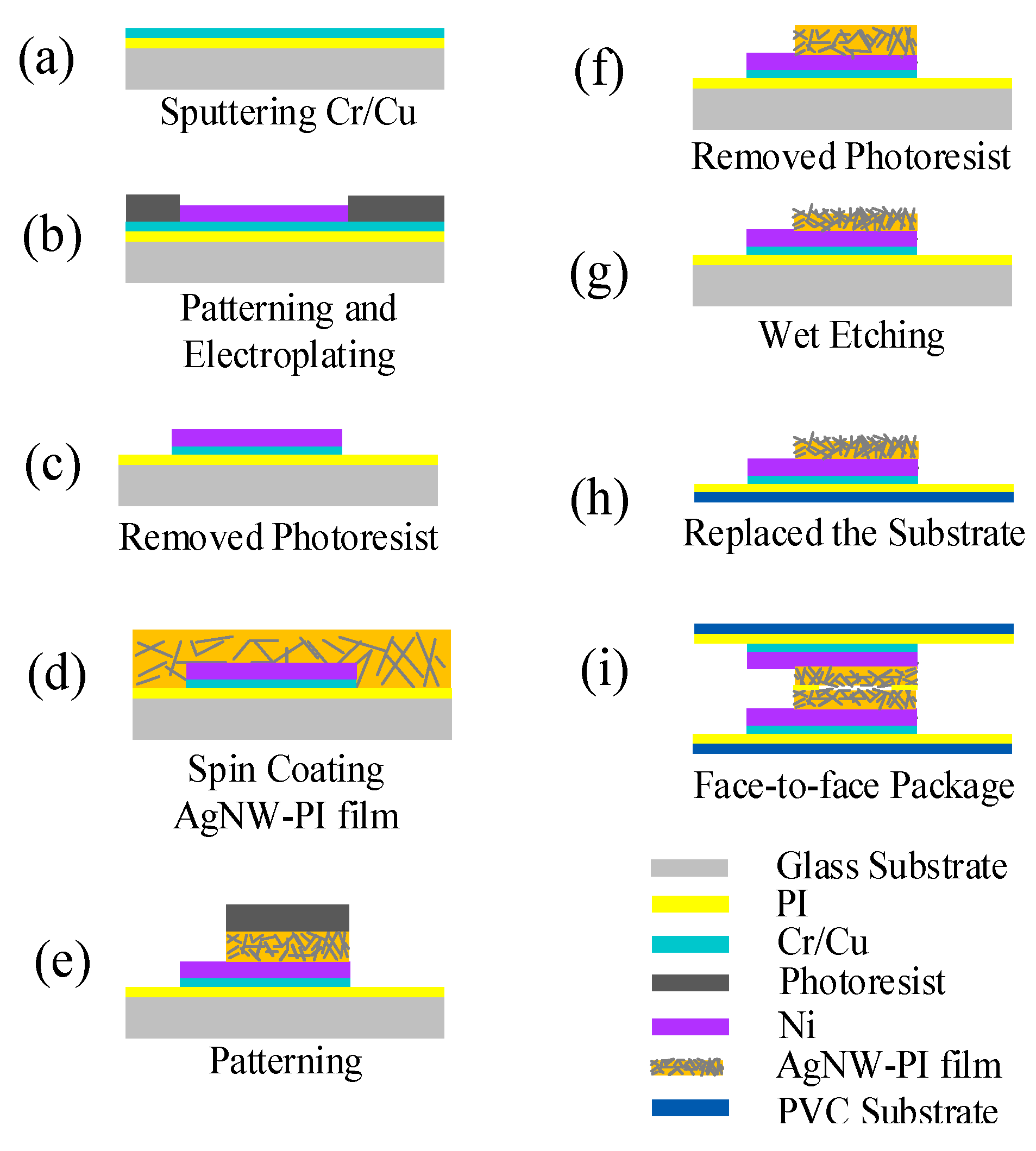
- (a)
- The glass substrate was cleaned with alkaline solution, acid solution, and deionized water. The PI film was pasted and a Cr/Cu seed layer was applied by magnetron sputtering for electroplating.
- (b)
- The substrate was spin-coated with positive photoresist (AZ 4620) with 10 µm thickness. The photoresist was patterned by lithography and developed. A thin layer of Ni metal (the area was about 2 × 2 cm2) was electroplated to 3–5 µm thickness. This layer of Ni metal was used as the electrode.
- (c)
- The excess photoresist and Cr/Cu seed layer were removed by alkaline solution. The surface was etched with O2 plasma for 2 min to remove organic residue.
- (d)
- Through several experiments, the spin-coating machine was set to a speed of 1500 r/min. Before the official spin-coating of AgNW-PI composite, a few drops of AgNW-PI composite were placed on the center of the substrate, and the rotation was gradually accelerated to ensure uniform coating of AgNW-PI composite onto the substrate, which enhances the adhesion of the AgNW-PI composite to the substrate. The AgNW-PI composite was then spin-coated for 25 s. The method of step imidization was used, baking at 80 °C for 30 min, and then baking at 110 °C for 1 h. The obtained AgNW-PI film had a thickness of about 20 μm and did not wrinkle, and the imidized structure was suitable for further use.
- (e)
- A 30 µm-thick positive photoresist (AZ 4903) was spin-coated and was patterned by lithography. The photoresist and AgNW-PI composite were developed.
- (f)
- The photoresist was removed using acetone to prevent removal of the remaining AgNW-PI composite.
- (g)
- The AgNW-PI film was wet etched by NaHCO3 solution with 1% mass concentration for 5 min in order to expose the Ag nanowires.
- (h)
- The PI film was peeled off from the glass substrate and pasted onto the thin flexible PVC substrate. Then, the conductive copper wires were welded on the Ni electrodes by a point welding machine and acrylic modified epoxy adhesive was utilized to reinforce the welding.
- (i)
- Two pieces of the abovementioned AgNW-PI films on the PVC flexible film were stuck face-to-face using double-sided adhesive PI tape and packaged using flexible adhesive tape to obtain a flexible pressure sensor.
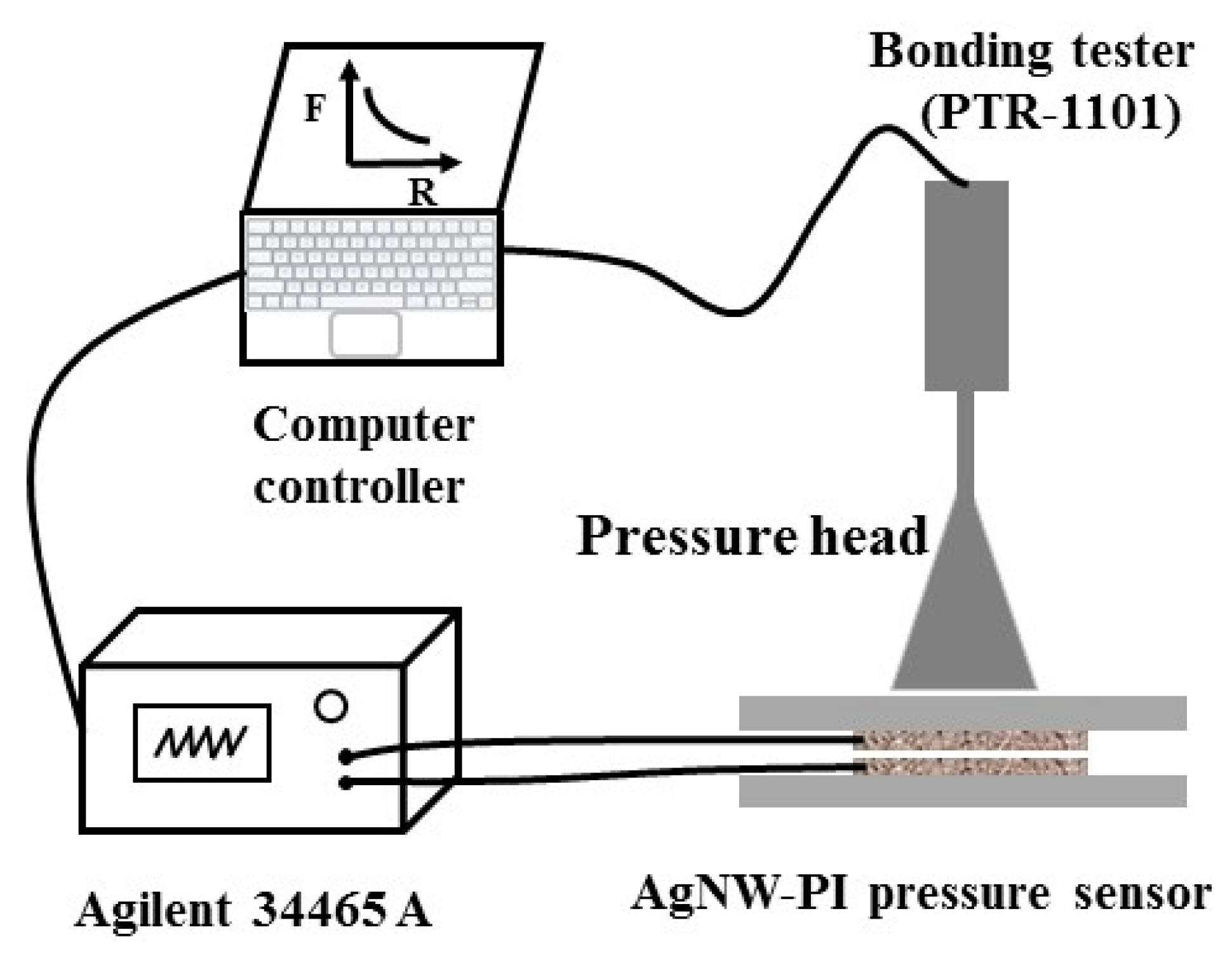
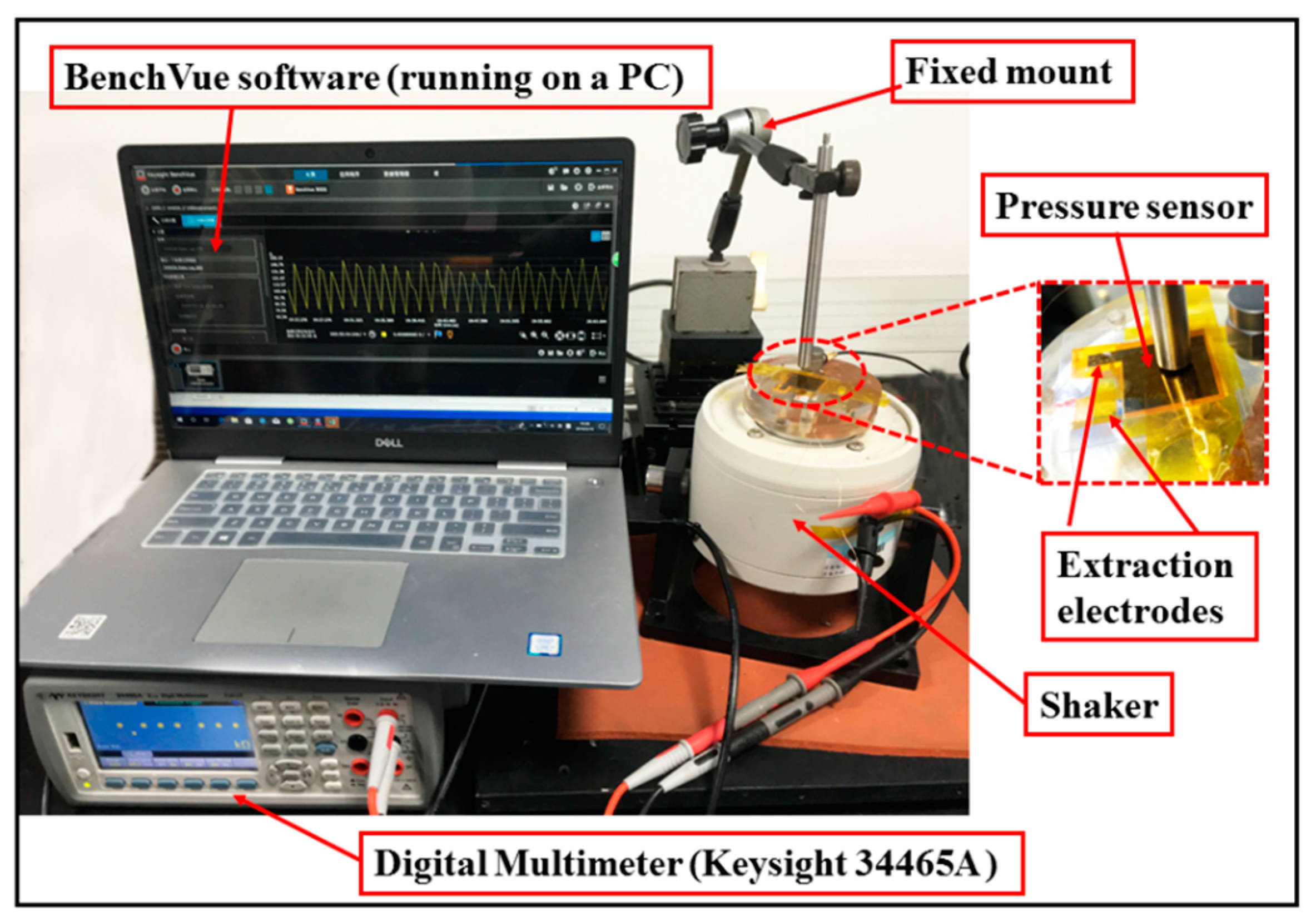
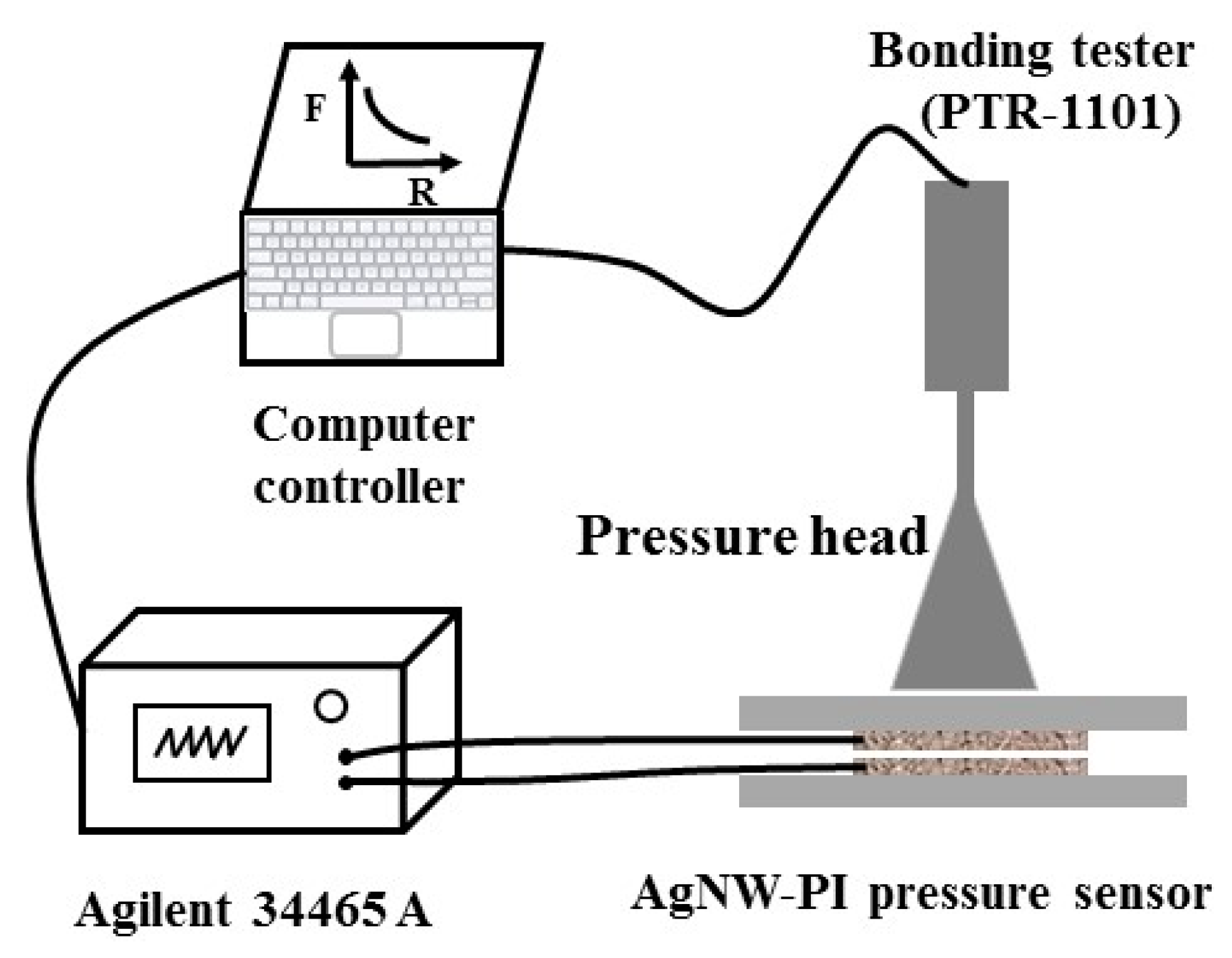
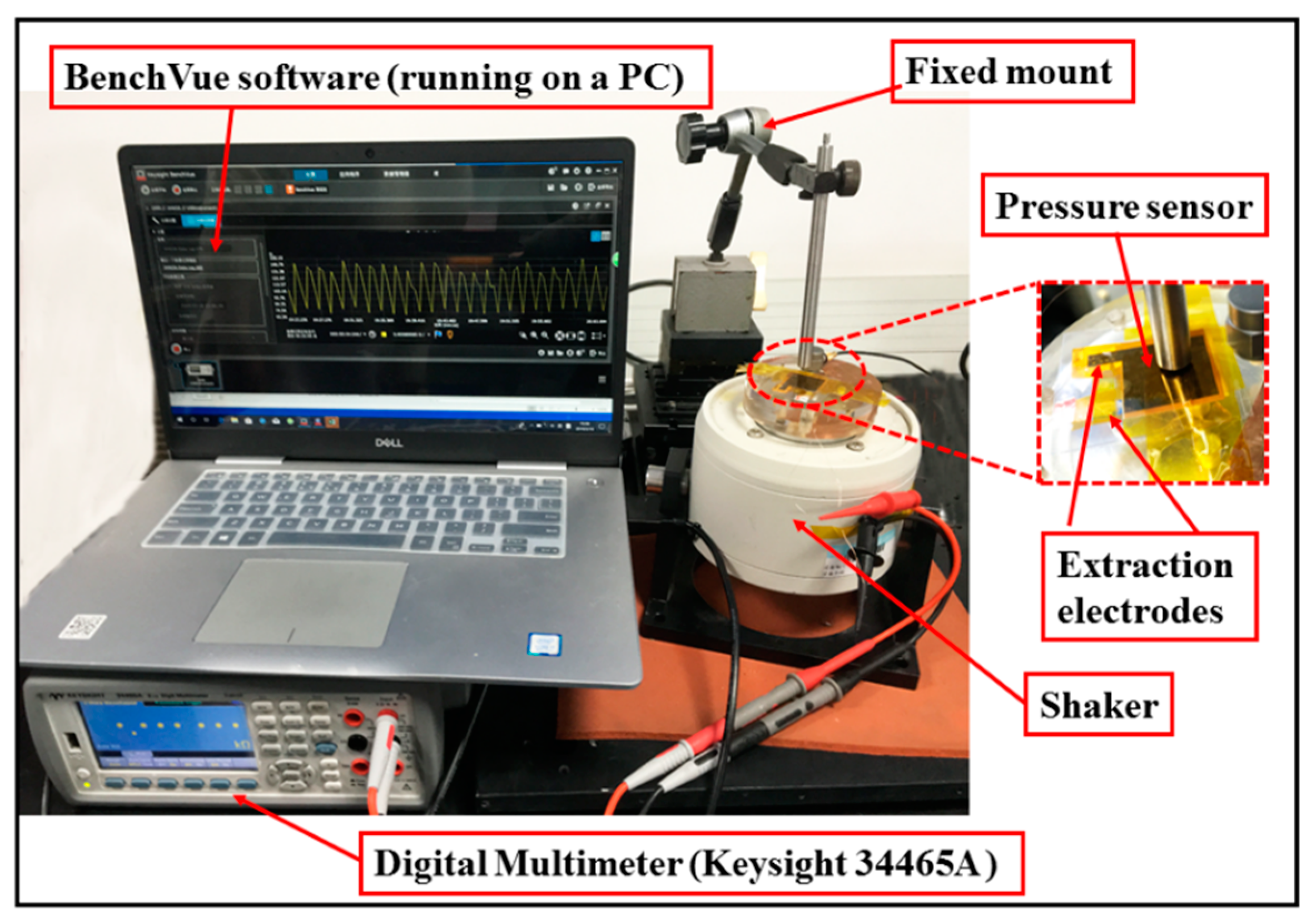
3.2. Experimental Setup
4. Results and Discussion
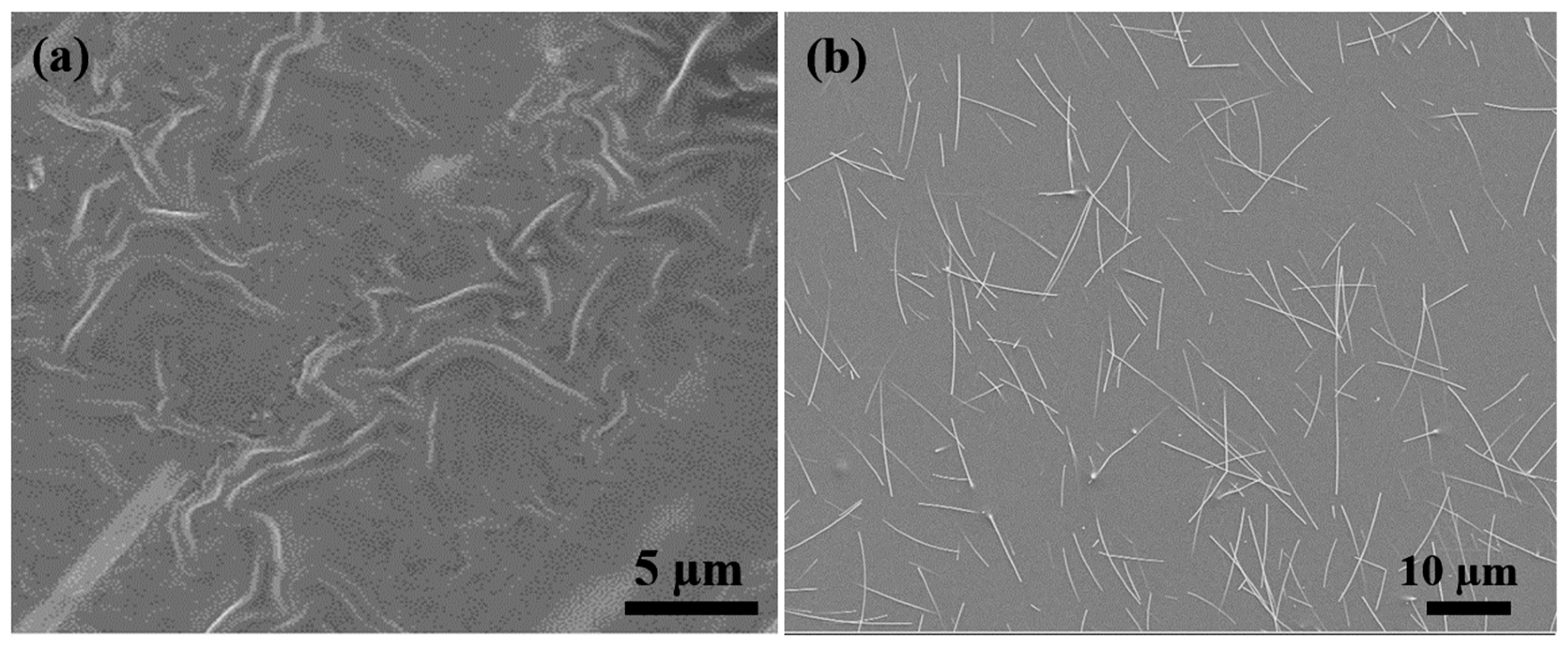
4.1. Surface Morphology
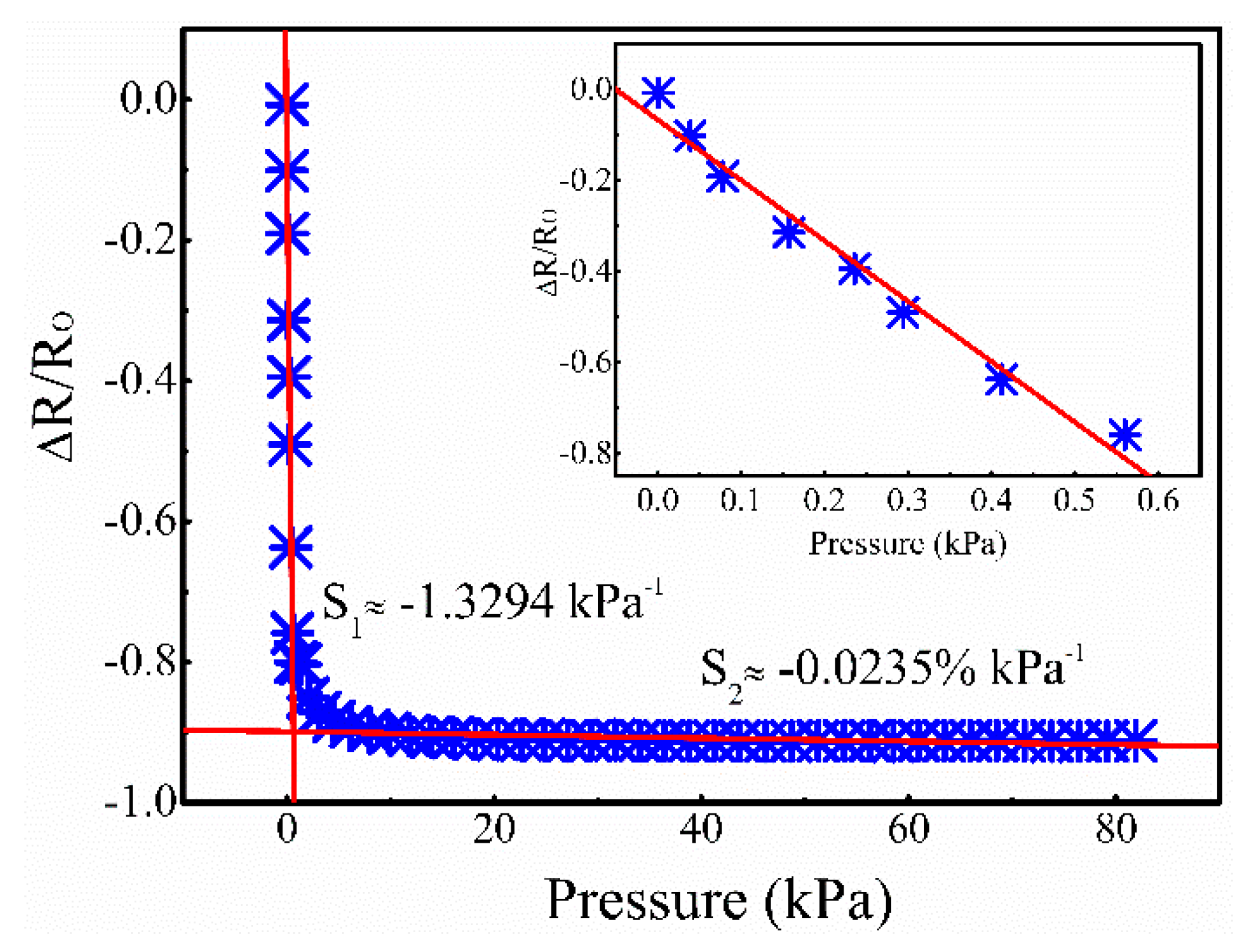
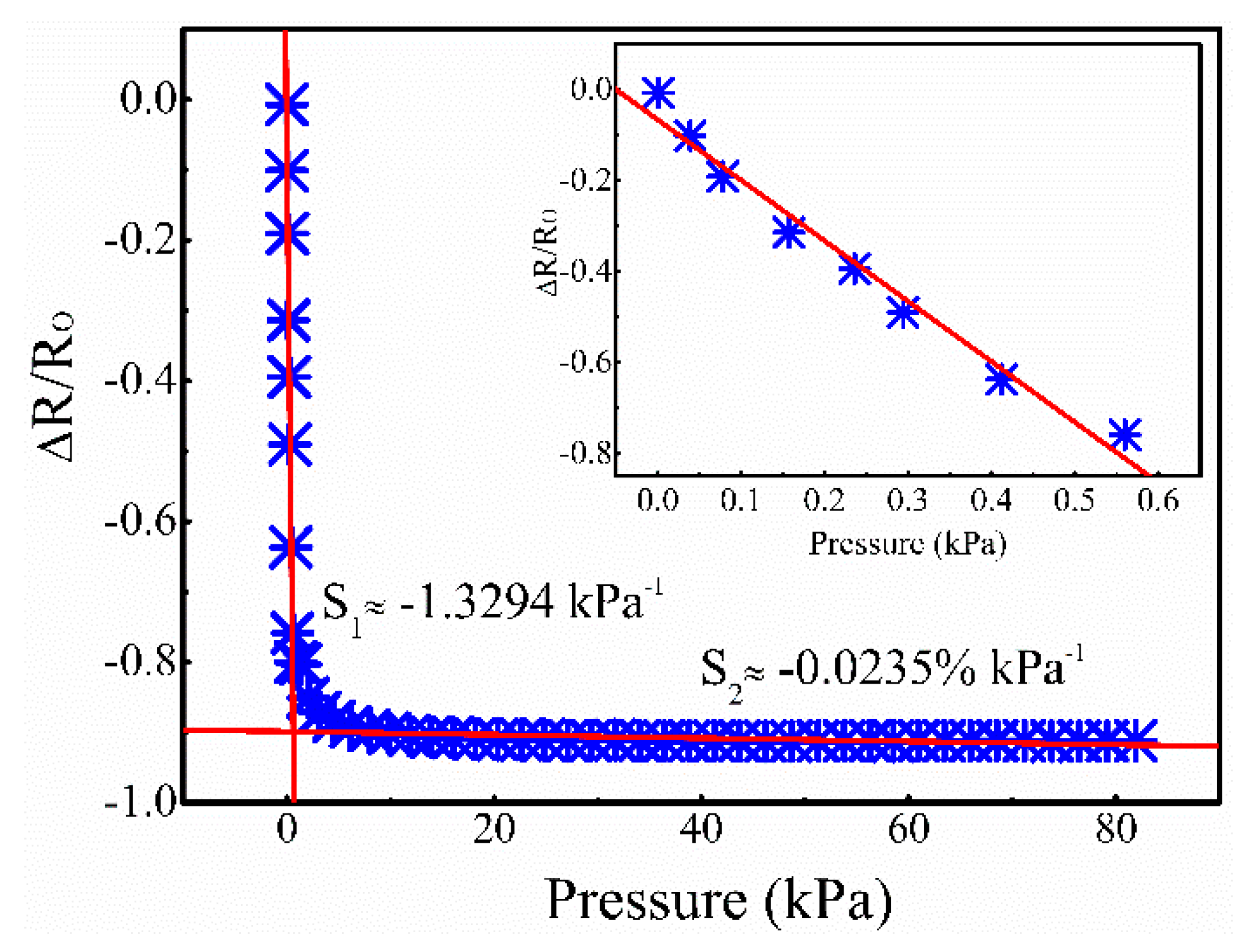
4.2. Sensitivity of the Flexible Pressure Sensor
S = (ΔR/Ro)/ΔP,
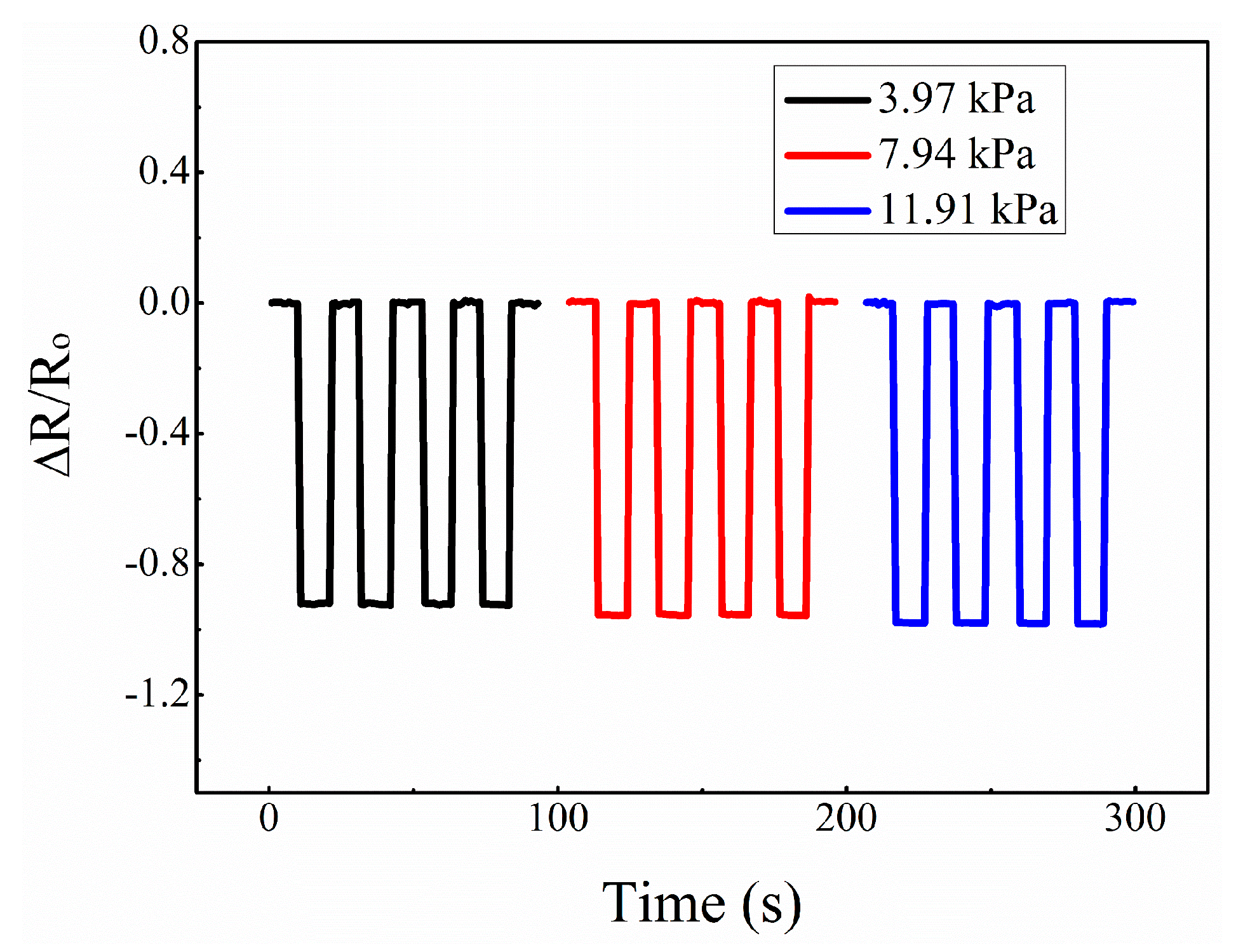
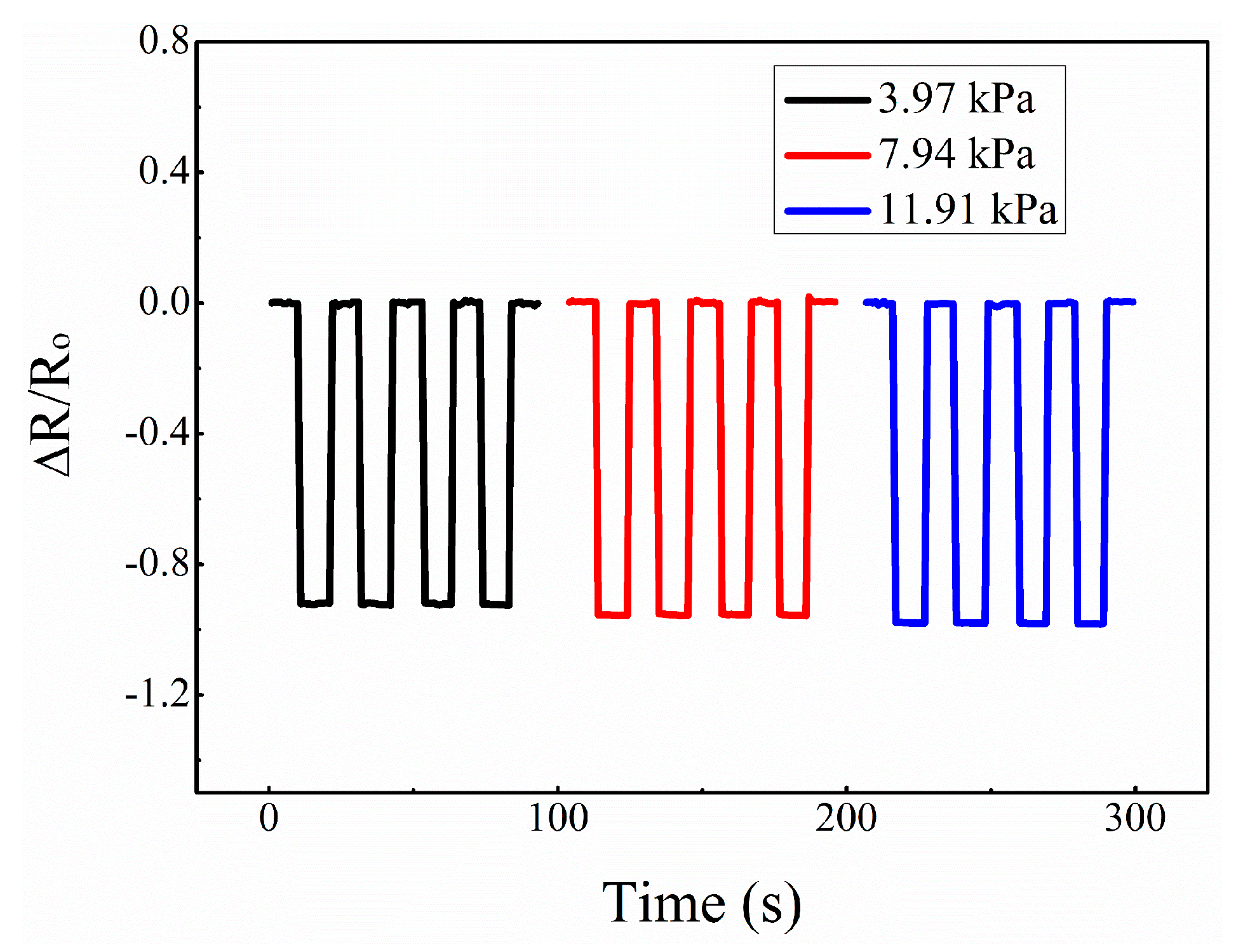
4.3. Resistance Response under Constant Pressure
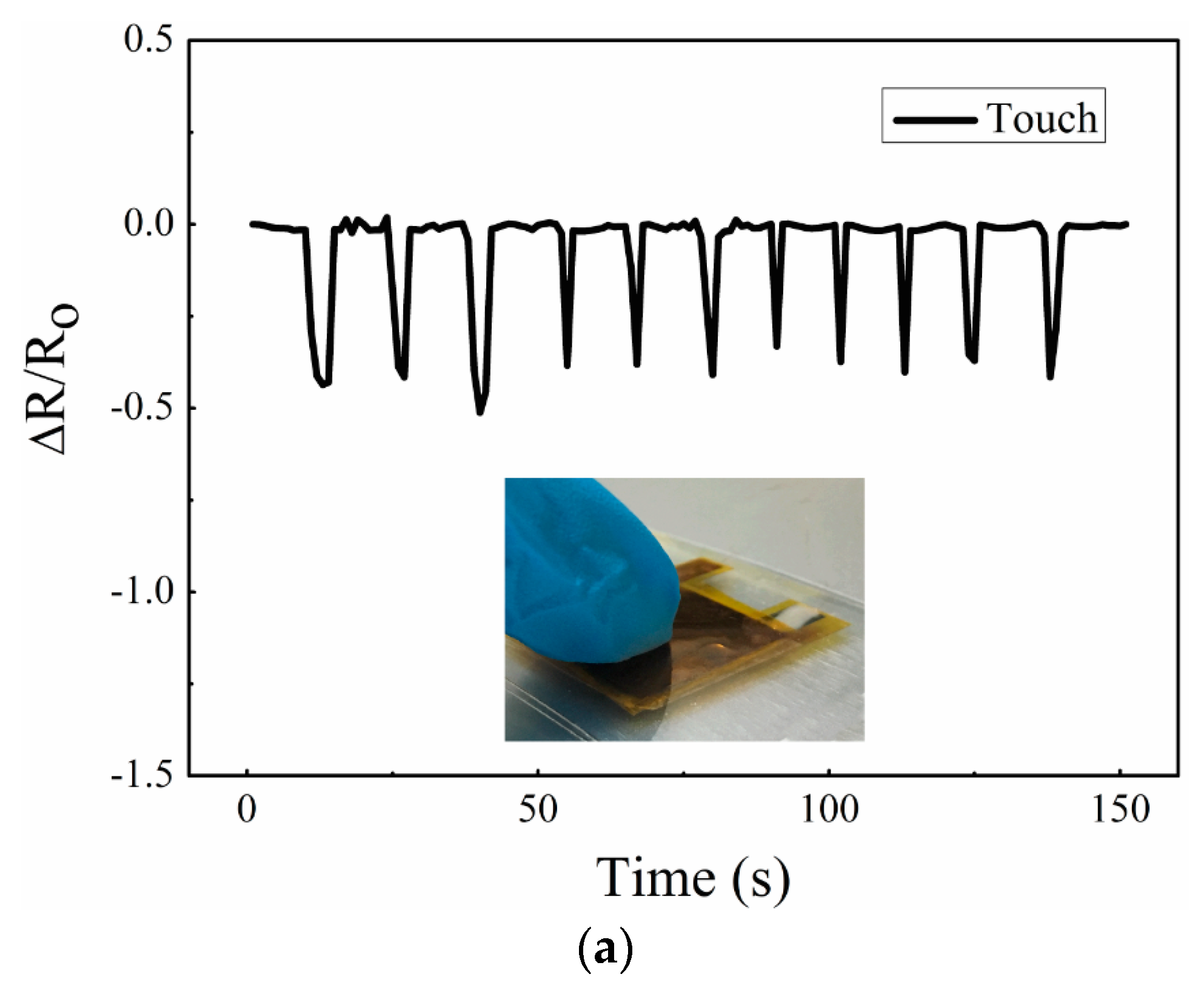
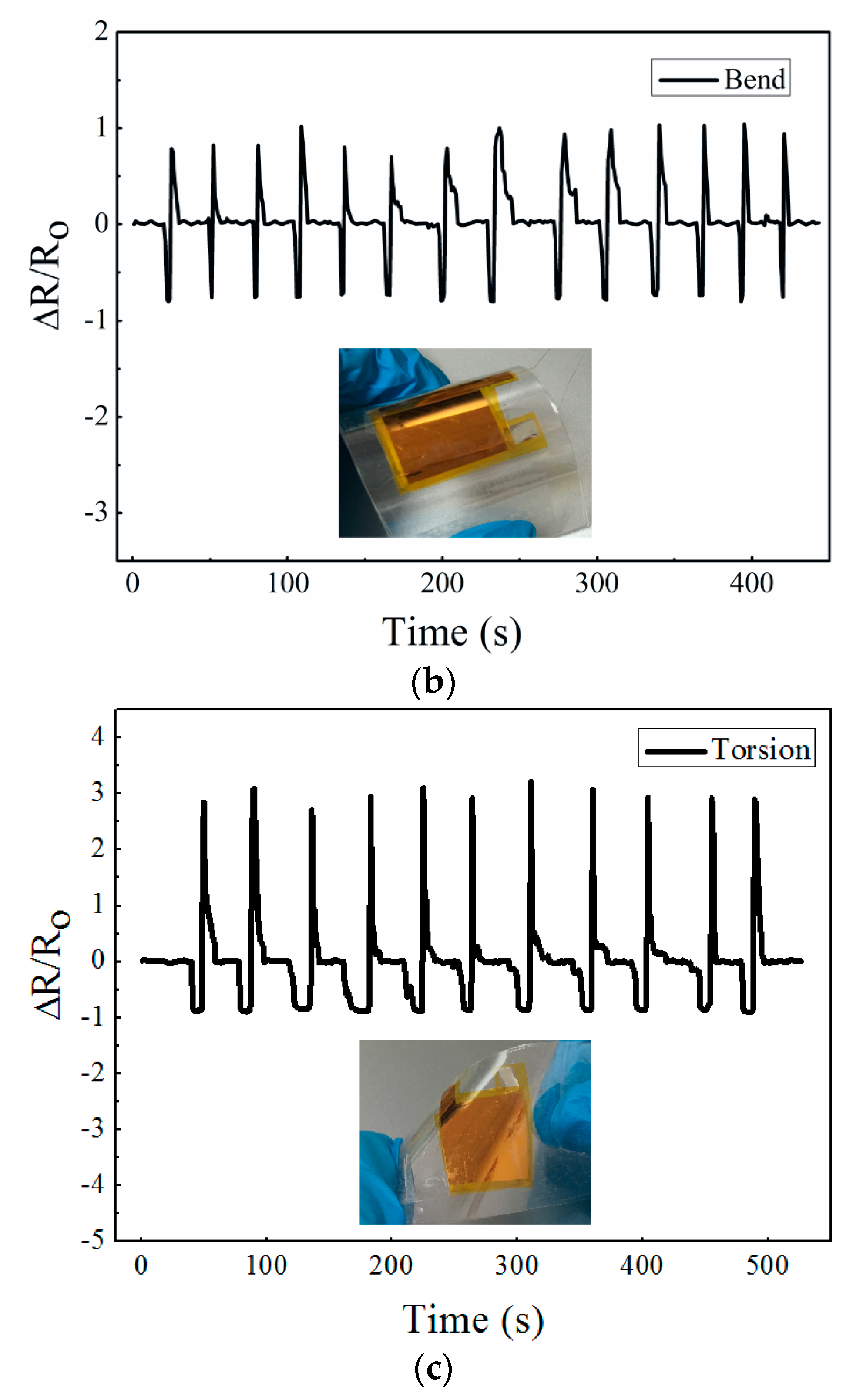
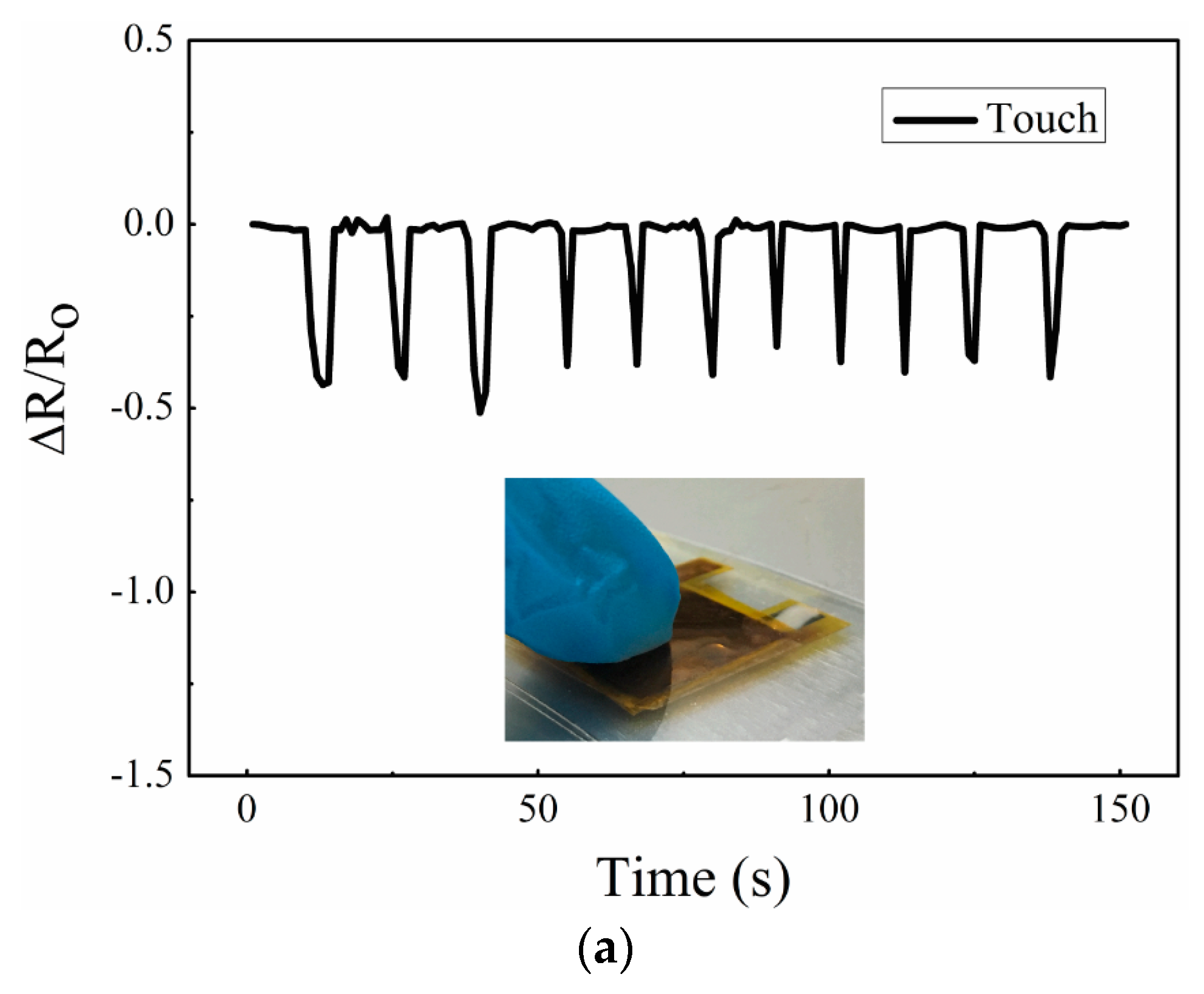
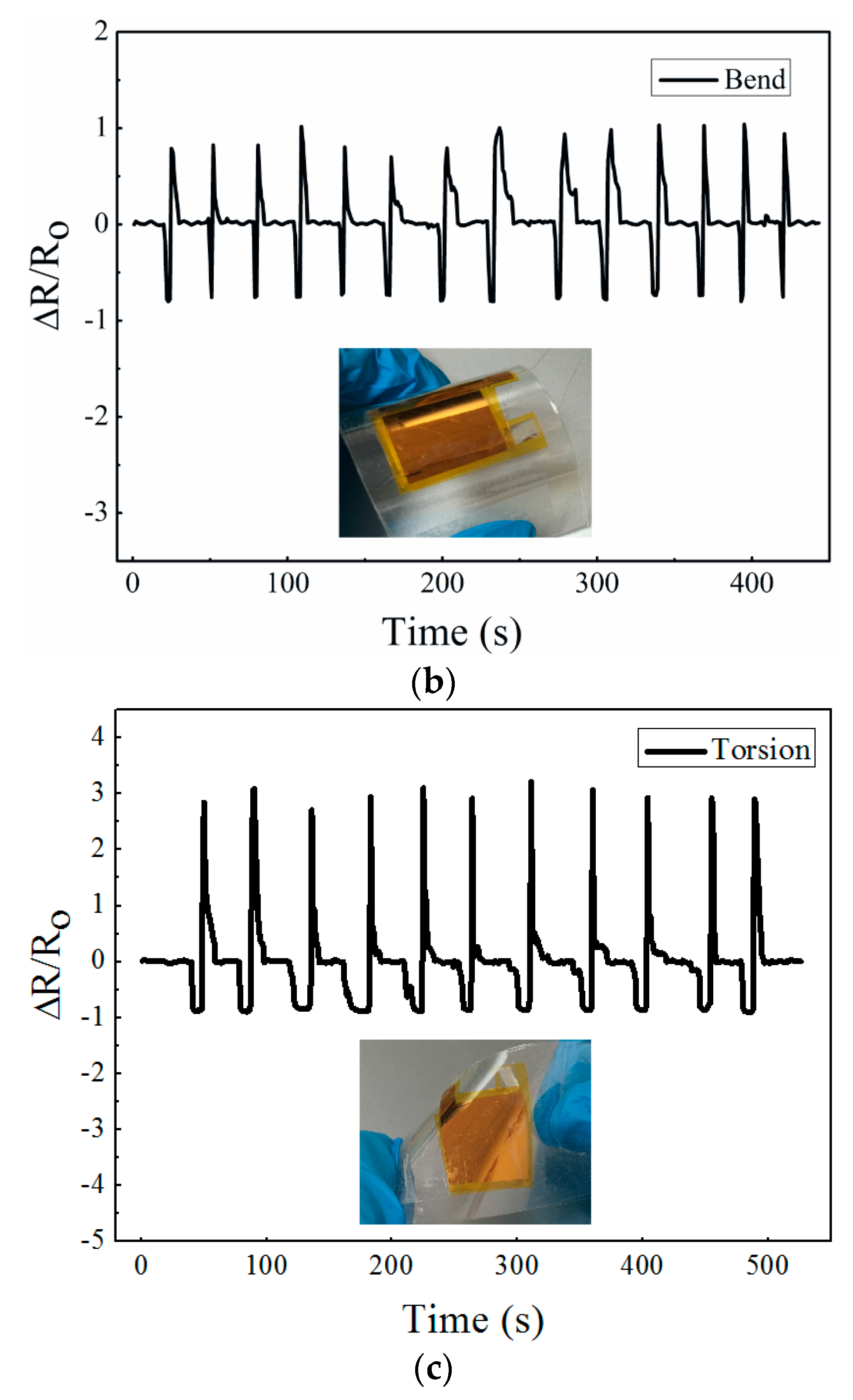
4.4. Resistance Response under Different Types of Mechanical Forces
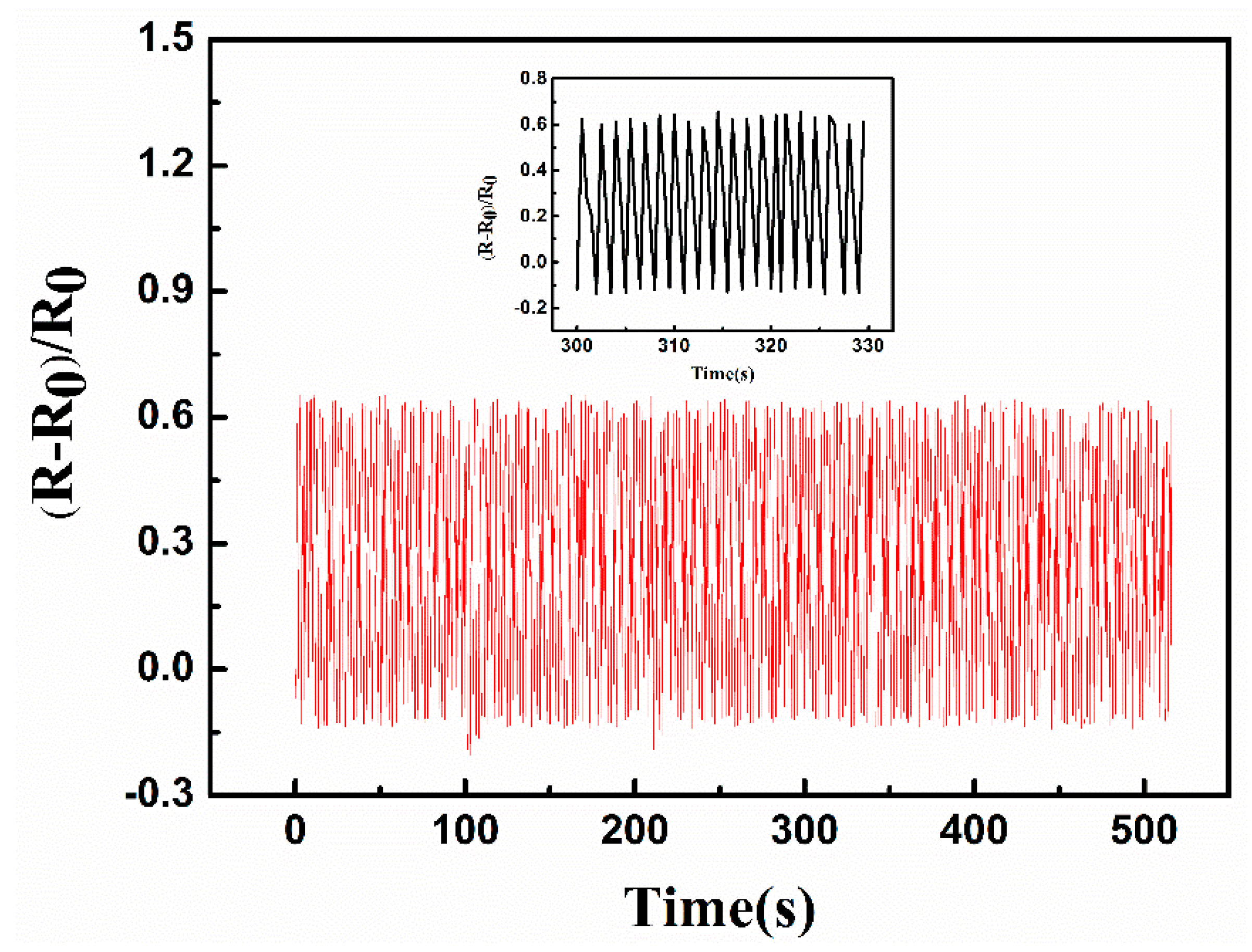
4.5. Dynamic Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Palczynska, A.; Prisacaru, A.; Gromala, P.J.; Han, B.; Mayer, D.; Melz, T. Towards prognostics and health monitoring: The potential of fault detection by piezoresistive silicon stress sensor. Microelectron. Reliab. 2017, 74, 165–172. [Google Scholar] [CrossRef]
- Yang, C.; Li, C. The Compensation for Hysteresis of Silicon Piezoresistive Pressure Sensor. IEEE Sens. J. 2016, 11, 2016–2021. [Google Scholar]
- Mei, H.; Zhang, C.; Rui, W.; Feng, J.; Tong, Z. Impedance characteristics of surface pressure-sensitive carbon black/silicone rubber composites. Sens. Actuators A Phys. 2015, 233, 118–124. [Google Scholar] [CrossRef]
- Wang, L.; Ding, T.; Peng, W. Thin Flexible Pressure Sensor Array Based on Carbon Black/Silicone Rubber Nanocomposite. IEEE Sens. J. 2009, 9, 1130–1135. [Google Scholar] [CrossRef]
- Lei, K.F.; Lee, K.F.; Lee, M.Y. Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron. Eng. 2012, 99, 1–5. [Google Scholar] [CrossRef]
- Tiefenauer, R.F.; Dalgaty, T.; Keplinger, T.; Tian, T.; Shih, C.J.; Vörös, J.; Aramesh, M. Monolayer Graphene Coupled to a Flexible Plasmonic Nanograting for Ultrasensitive Strain Monitoring. Small 2018, 14, 1–7. [Google Scholar] [CrossRef]
- Tiefenauer, R.F.; Tybrandt, K.; Aramesh, M.; Vörös, J. Fast and Versatile Multiscale Patterning by Combining Template-Stripping with Nanotransfer Printing. Acs Nano 2018, 12, 2514–2520. [Google Scholar] [CrossRef]
- Guo, X.; Huang, Y.; Teng, K.; Liu, P.; Liu, C.; Tian, H. Modular Design and Implementation of Flexible Artificial Skin with Temperature and Pressure Sensors. Robot 2015, 37, 493–498. [Google Scholar]
- Liaw, D.J.; Wang, K.L.; Huang, Y.C.; Lee, K.R.; Lai, J.Y.; Ha, C.S. Advanced polyimide materials: Syntheses, physical properties and applications. Prog. Polym. Sci. 2012, 37, 907–974. [Google Scholar] [CrossRef]
- Miao, X.; Dai, X.; Huang, Y.; Ding, G.; Zhao, X. Large Out-of-Plane Displacement Bistable Electromagnetic Microswitch on a Single Wafer. Sensors 2016, 16, 634. [Google Scholar] [CrossRef] [PubMed]
- Hyun, D.C.; Park, M.; Park, C.; Kim, B.; Xia, Y.; Hur, J.H.; Kim, J.M.; Park, J.J.; Jeong, U. Ordered zigzag stripes of polymer gel/metal nanoparticle composites for highly stretchable conductive electrodes. Adv. Mater. 2011, 23, 2946–2950. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat Commun. 2014, 5, 3132–3139. [Google Scholar] [CrossRef] [PubMed]
- Cao, P.; Peng, J.; Li, J.; Zhai, M. Highly conductive carbon black supported amorphous molybdenum disulfide for efficient hydrogen evolution reaction. J. Power Sources 2017, 347, 210–219. [Google Scholar] [CrossRef]
- Wang, M.; Huang, Y.; Ge, Y.; Fu, X.; Huang, P. A Study of Resistance Relaxation Phenomenon Based on Carbon Black/Silicone Rubber System Flexible Tactile Sensor. In Proceedings of the International Conference on Information Acquisition, Seogwipo-si, Korea, 8–11 July 2007; pp. 366–371. [Google Scholar]
- Ponnamma, D.; Sadasivuni, K.K.; Cabibihan, J.-J.; Yoon, W.J.; Kumar, B. Reduced graphene oxide filled poly(dimethyl siloxane) based transparent stretchable, and touch-responsive sensors. Appl. Phys. Lett. 2016, 108, 1–7. [Google Scholar] [CrossRef]
- Ho, C.H.; Su, W.S.; Hu, C.F.; Lin, C.M. A flexible, highly-sensitive, and easily-fabricated carbon-nanotubes tactile sensor on polymer substrate. In Proceedings of the IEEE International Conference on Solid-State and Integrated Circuit Technology, Shanghai, China, 1–4 November 2010; pp. 1388–1391. [Google Scholar]
- Hu, C.-F.; Su, W.-S.; Fang, W. Development of patterned carbon nanotubes on a 3D polymer substrate for the flexible tactile sensor application. J. Micromech. Microeng. 2011, 21, 1–12. [Google Scholar] [CrossRef]
- Lee, J.; Cho, D.; Jeong, Y. A resistive-type sensor based on flexible multi-walled carbon nanotubes and polyacrylic acid composite films. Solid·State Electron. 2013, 87, 80–84. [Google Scholar] [CrossRef]
- Ounaies, Z.; Park, C.; Wise, K.E.; Siochi, E.J.; Harrison, J.S. Electrical properties of single wall carbon nanotube reinforced polyimide composites. Compos. Sci. Technol. 2003, 63, 1637–1646. [Google Scholar] [CrossRef]
- Yao, J.L.; Yang, X.; Shao, N.; Luo, H.; Zhang, T.; Jiang, W.G. A Flexible and Highly Sensitive Piezoresistive Pressure Sensor Based on Micropatterned Films Coated with Carbon Nanotubes. J. Nanomater. 2016, 2016, 3024815. [Google Scholar] [CrossRef]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly stretchable and sensitive strain sensor based on silver nanowire-elastomer nanocomposite. Acs Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef] [PubMed]
- Lagrange, M.; Langley, D.P.; Giusti, G.; Jimenez, C.; Brechet, Y.; Bellet, D. Optimization of silver nanowire-based transparent electrodes: Effects of density, size and thermal annealing. Nanoscale 2015, 7, 17410–17423. [Google Scholar] [CrossRef]
- Nam, S.; Song, M.; Kim, D.H.; Cho, B.; Lee, H.M.; Kwon, J.D.; Park, S.G.; Nam, K.S.; Jeong, Y.; Kwon, S.H. Ultrasmooth, extremely deformable and shape recoverable Ag nanowire embedded transparent electrode. Sci. Rep. 2014, 4, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Bai, J. Highly sensitive piezo-resistive graphite nanoplatelet-carbon nanotube hybrids/polydimethylsilicone composites with improved conductive network construction. ACS Appl. Mater. Interfaces 2015, 7, 9652–9659. [Google Scholar] [CrossRef] [PubMed]
- Haniff, M.A.S.M.; Lee, H.W.; Bien, D.C.S.; Teh, A.S.; Azid, I.A. Highly sensitive integrated pressure sensor with horizontally oriented carbon nanotube network. Nanoscale Res. Lett. 2014, 9, 49. [Google Scholar] [CrossRef] [PubMed]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Ding, G.; Yang, Z. A High Sensitive Flexible Pressure Sensor Designed by Silver Nanowires Embedded in Polyimide (AgNW-PI). Micromachines 2019, 10, 206. https://doi.org/10.3390/mi10030206
Li H, Ding G, Yang Z. A High Sensitive Flexible Pressure Sensor Designed by Silver Nanowires Embedded in Polyimide (AgNW-PI). Micromachines. 2019; 10(3):206. https://doi.org/10.3390/mi10030206
Chicago/Turabian StyleLi, Hongfang, Guifu Ding, and Zhuoqing Yang. 2019. "A High Sensitive Flexible Pressure Sensor Designed by Silver Nanowires Embedded in Polyimide (AgNW-PI)" Micromachines 10, no. 3: 206. https://doi.org/10.3390/mi10030206
APA StyleLi, H., Ding, G., & Yang, Z. (2019). A High Sensitive Flexible Pressure Sensor Designed by Silver Nanowires Embedded in Polyimide (AgNW-PI). Micromachines, 10(3), 206. https://doi.org/10.3390/mi10030206