A New Stress-Released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope

Abstract
:1. Introduction
2. Thermal Stress Analysis
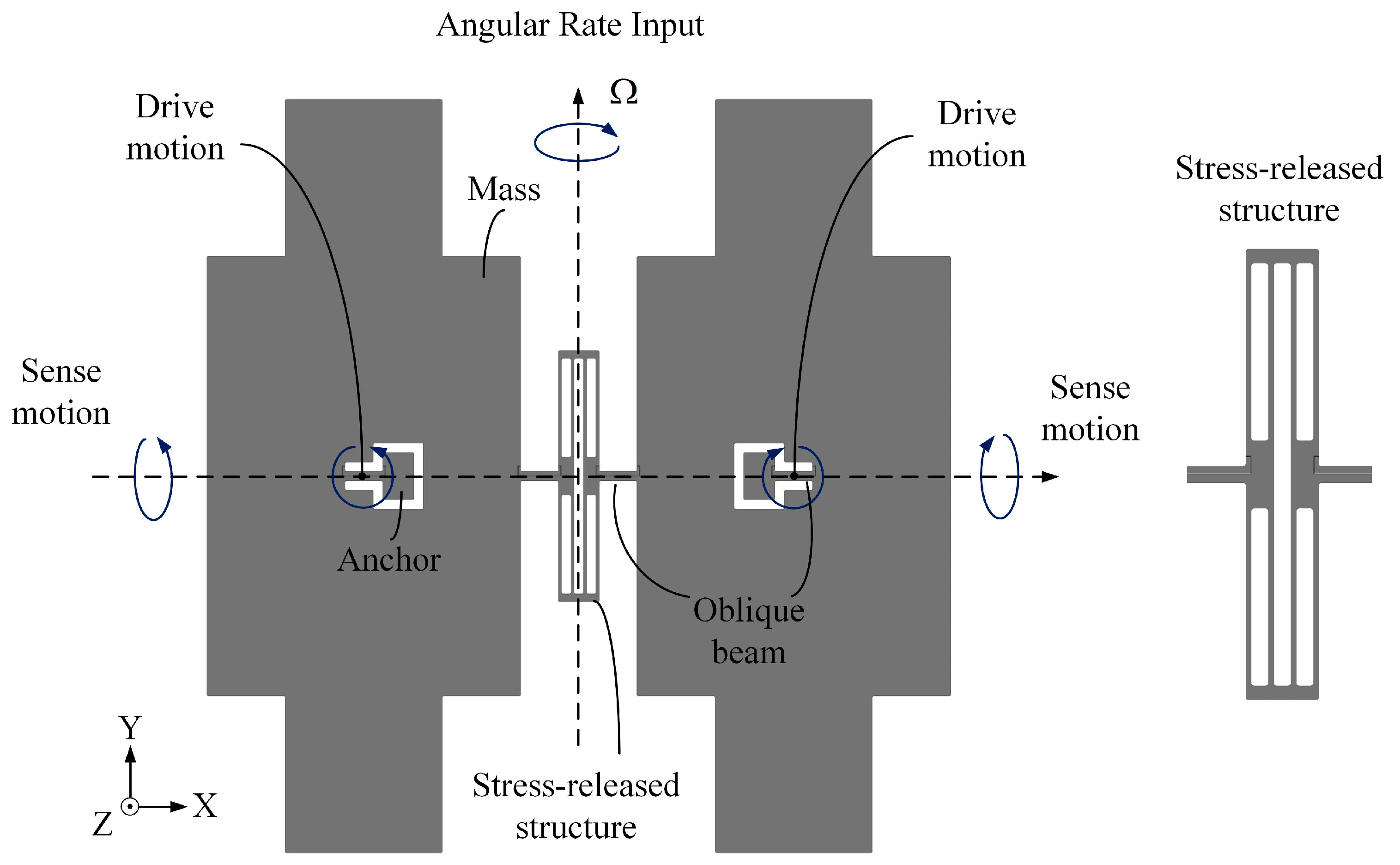
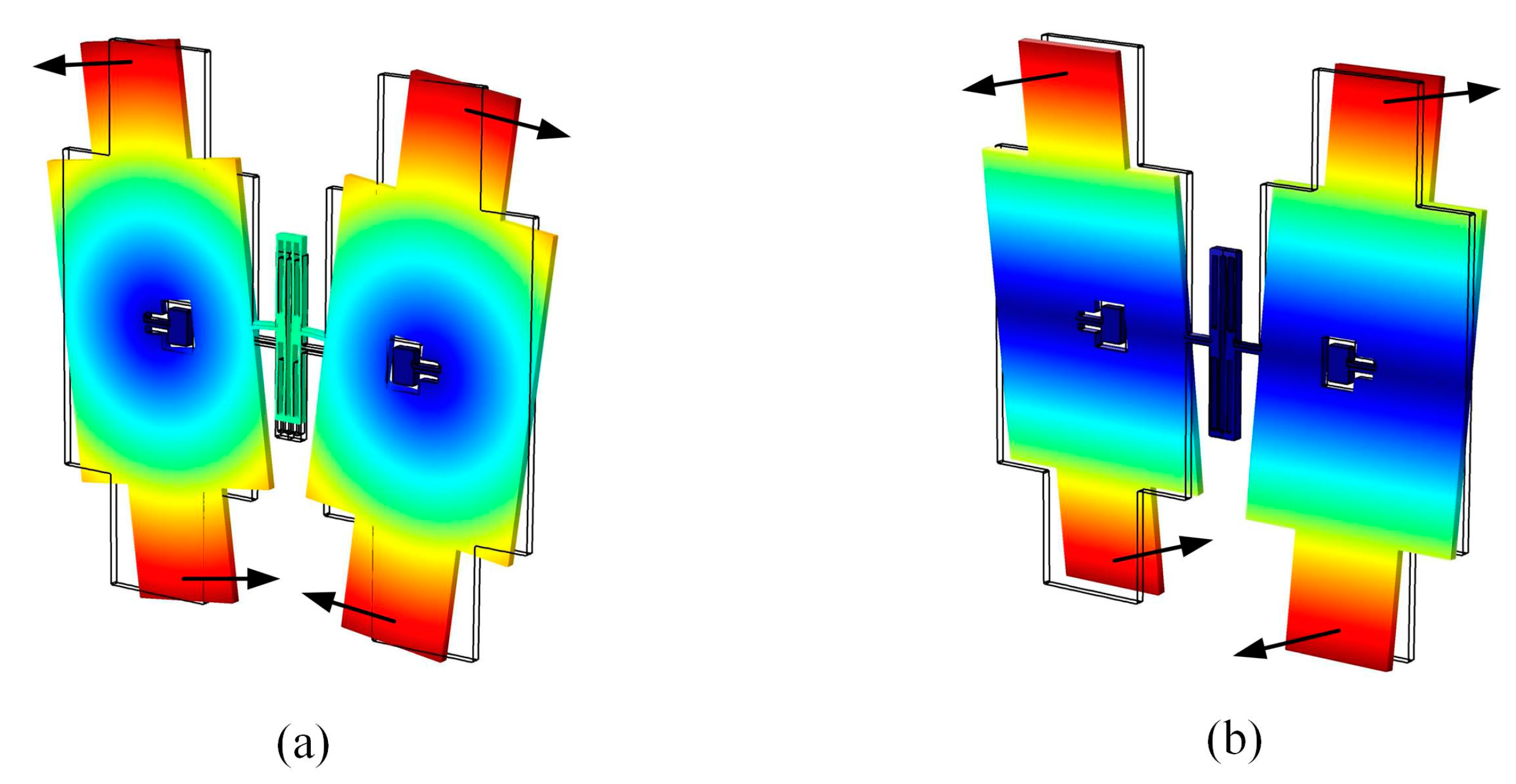
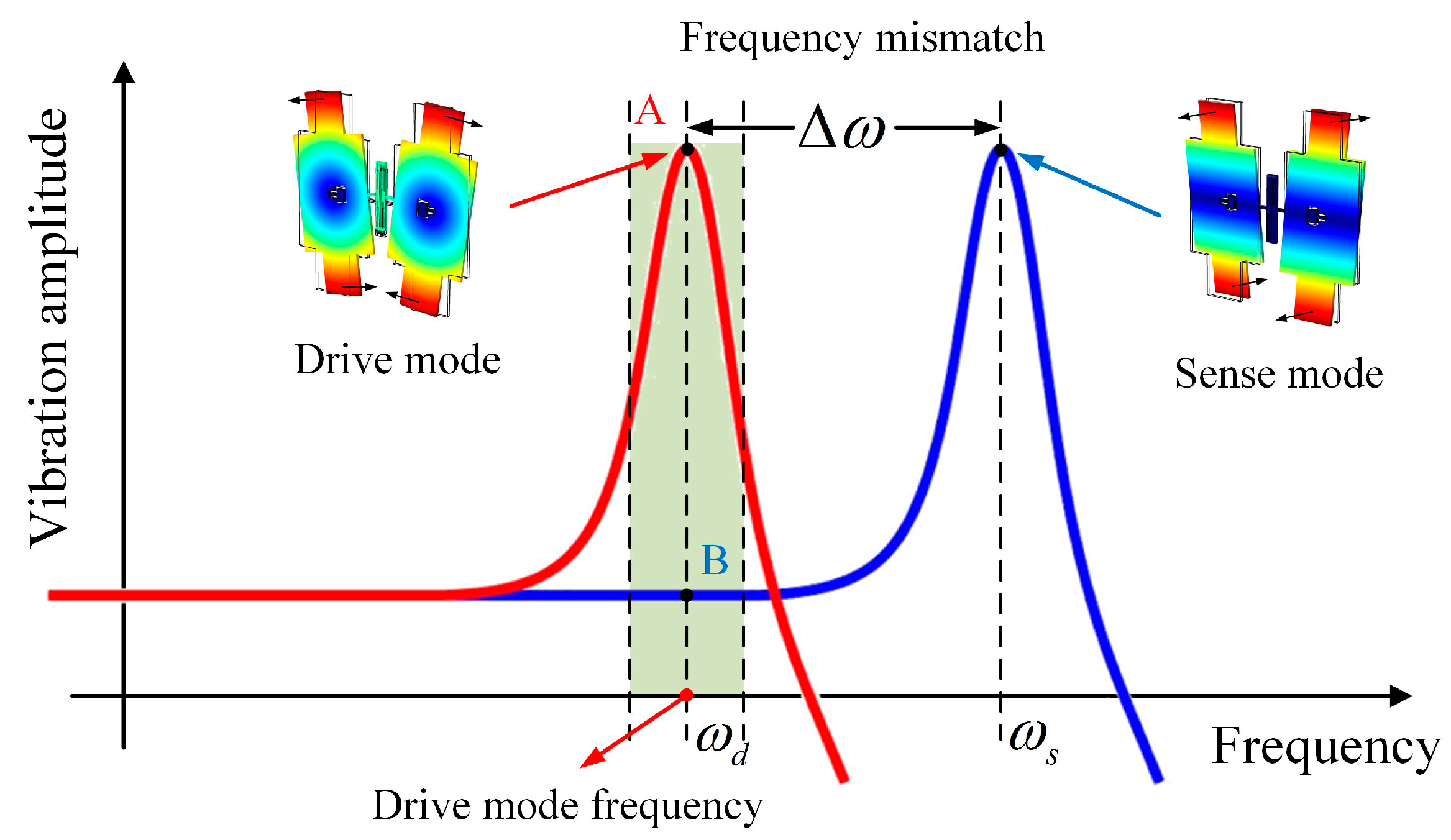
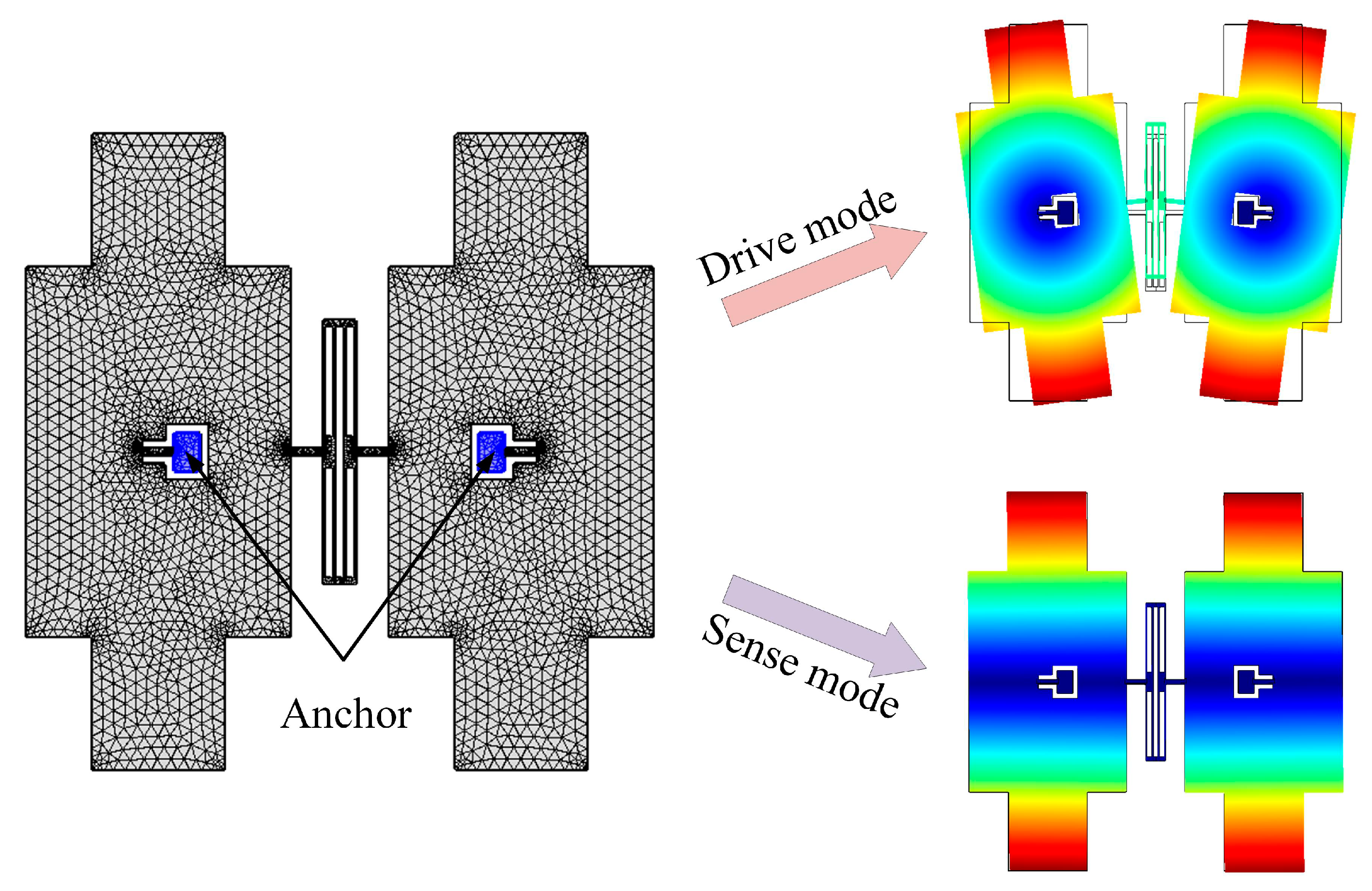
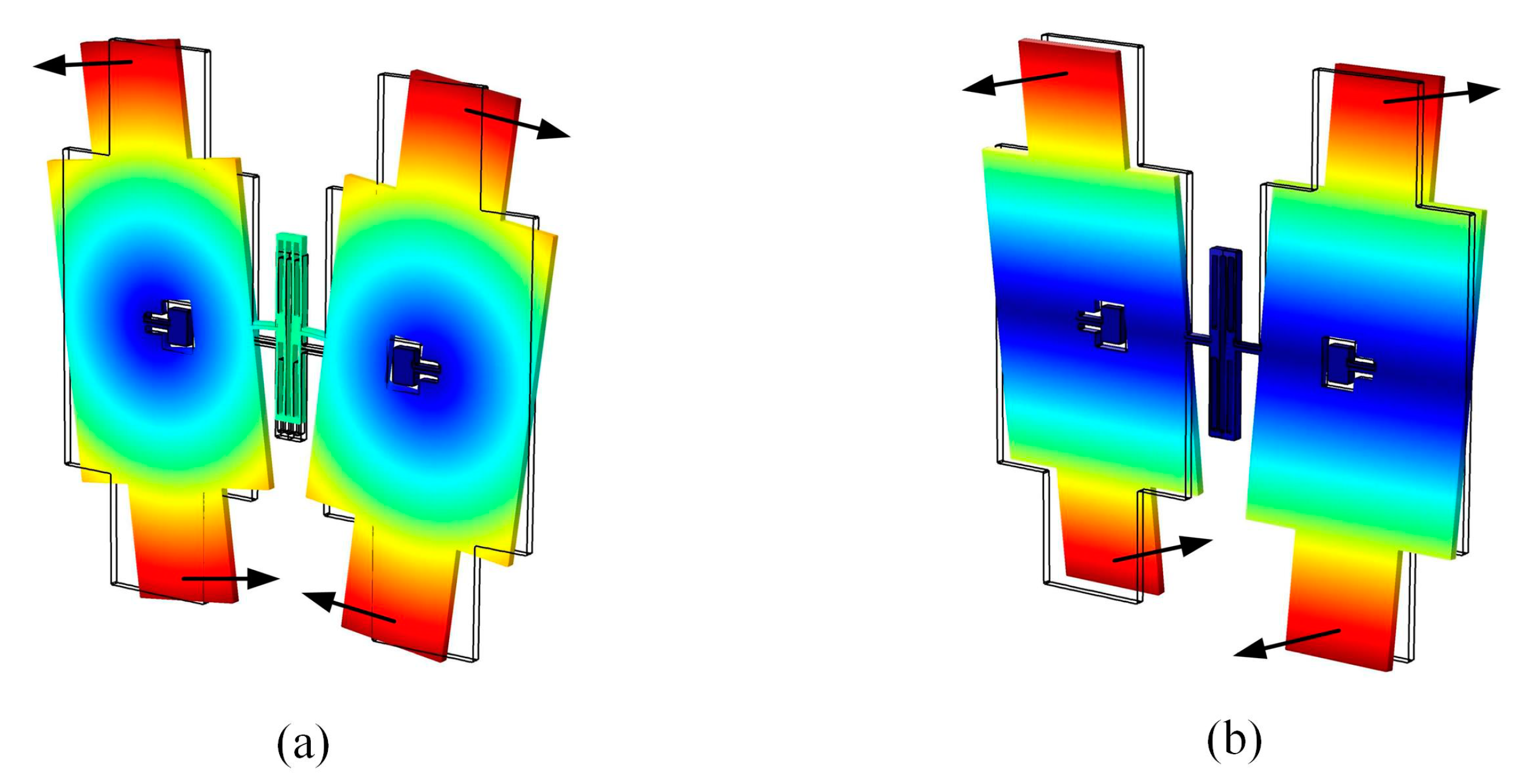
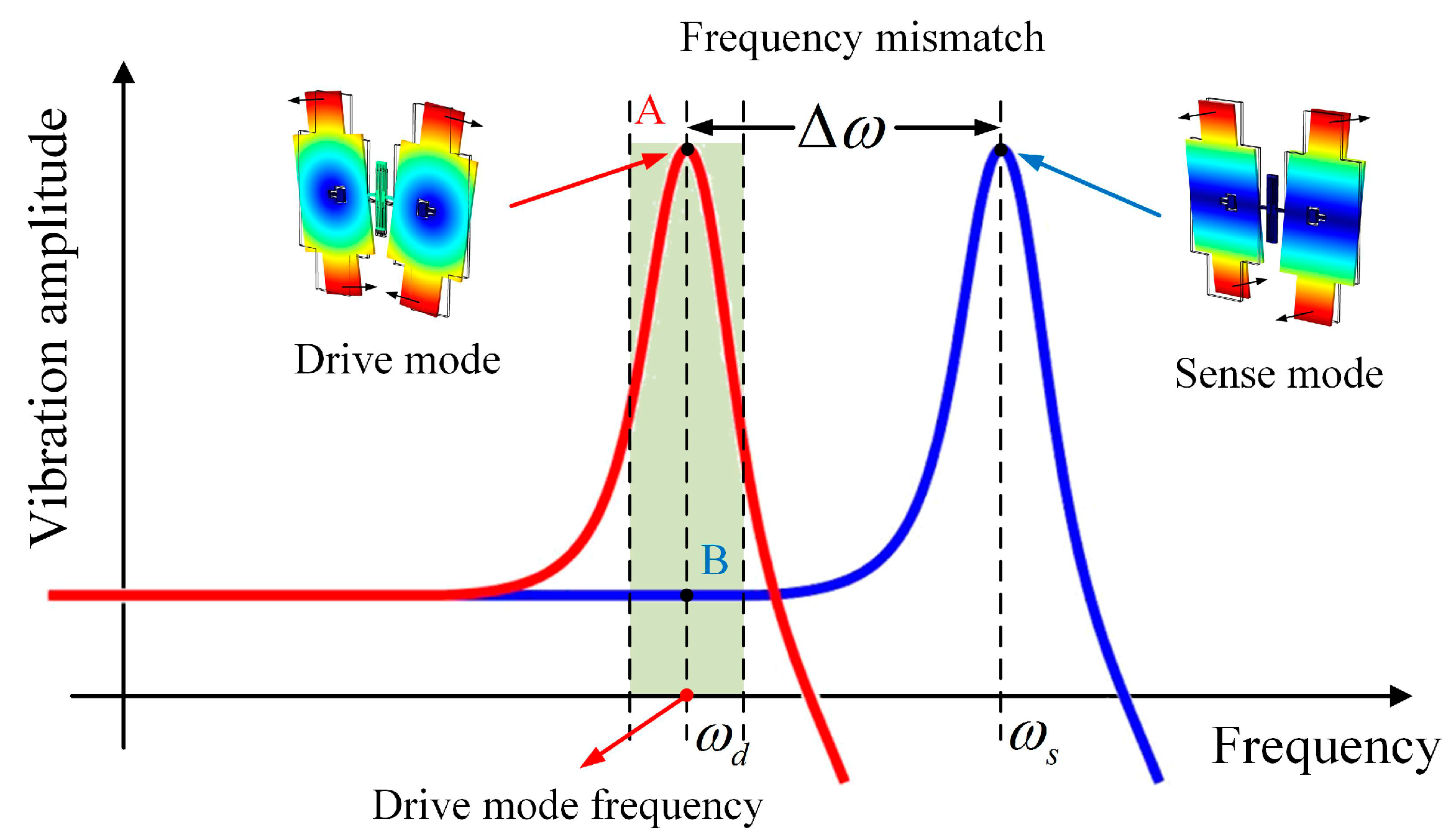
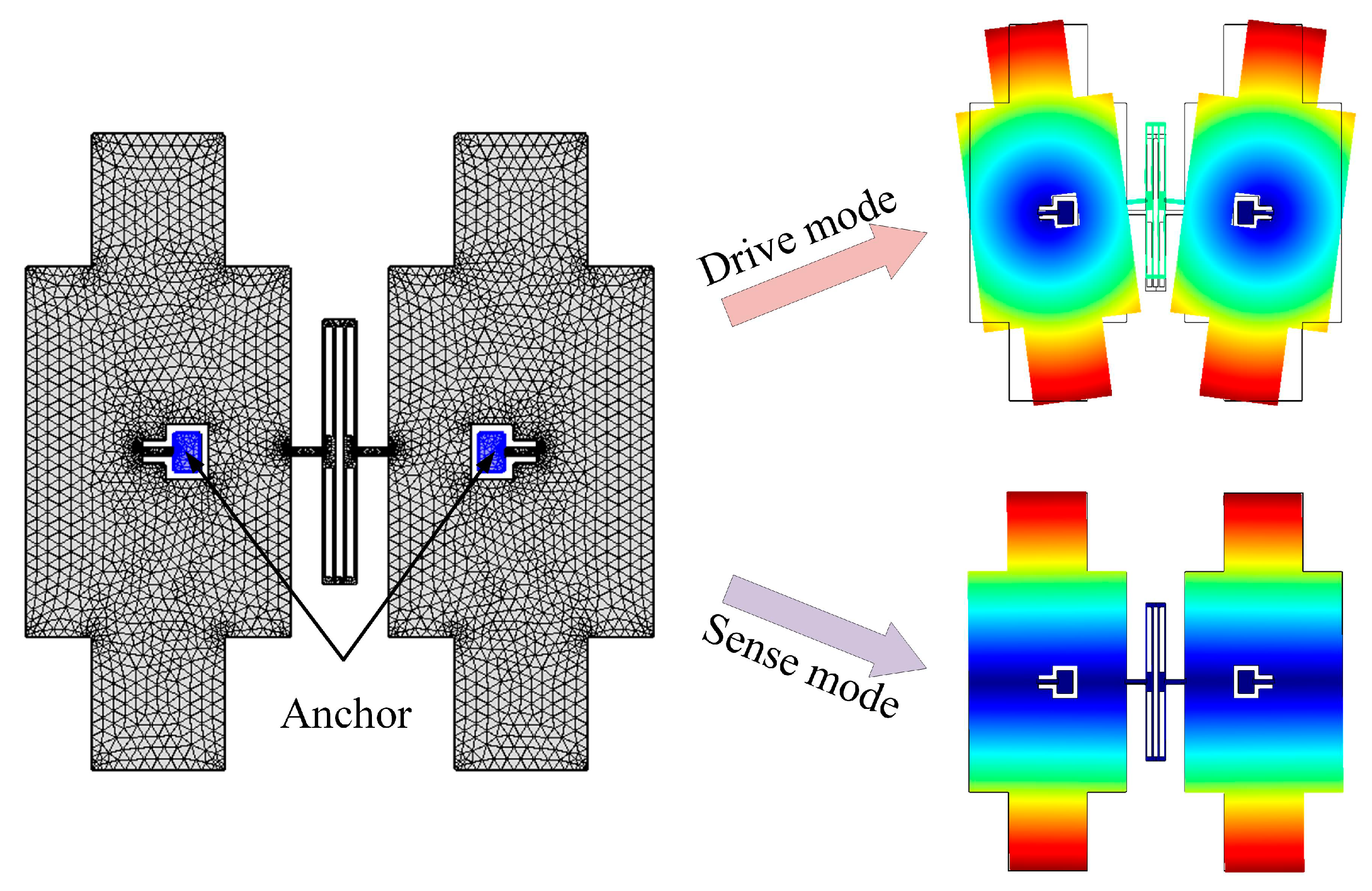
2.1. The Theoretical Principle of the Butterfly Vibratory Gyroscope (BFVG)
2.2. Thermal Stress of the BFVG
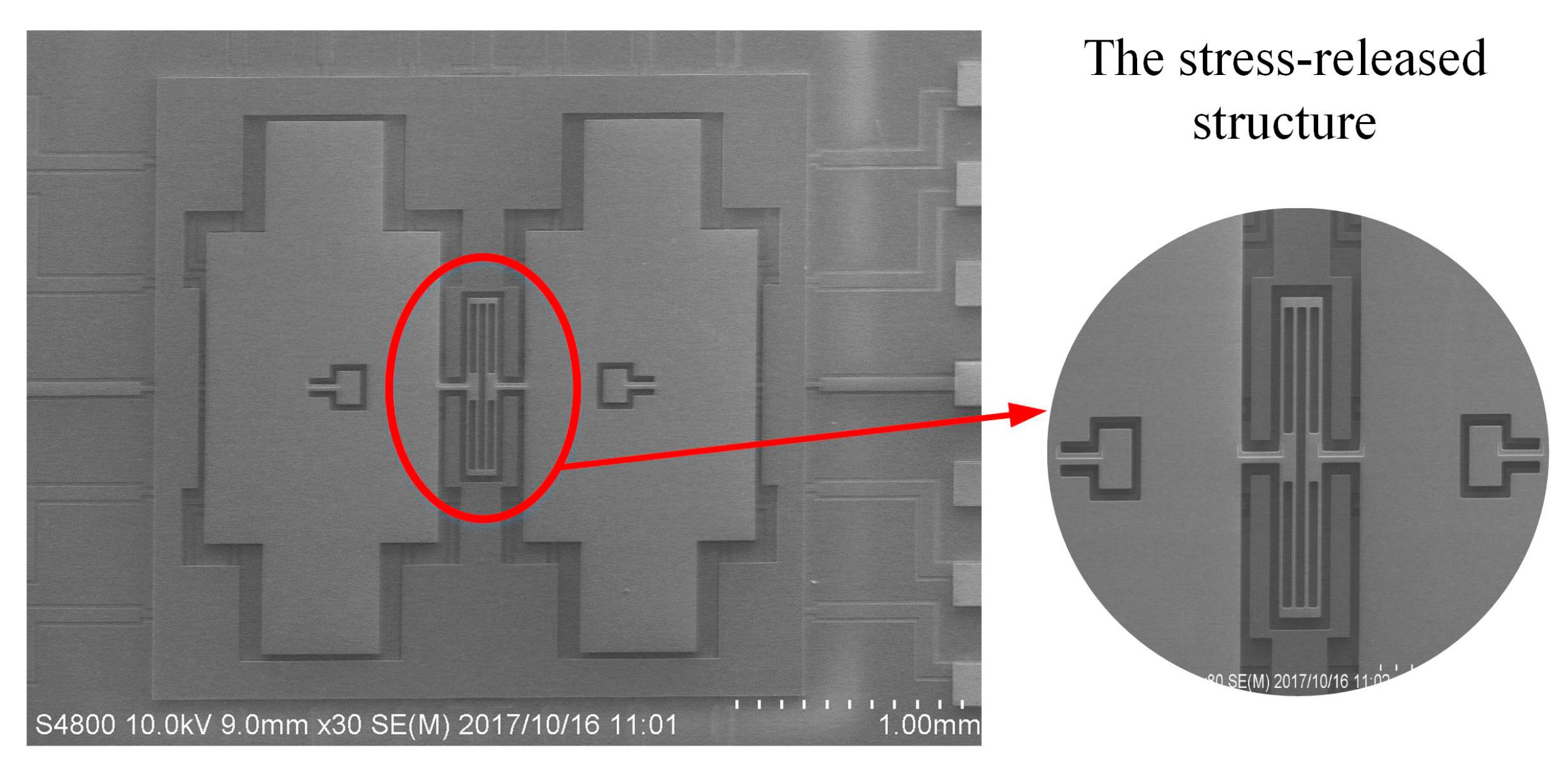
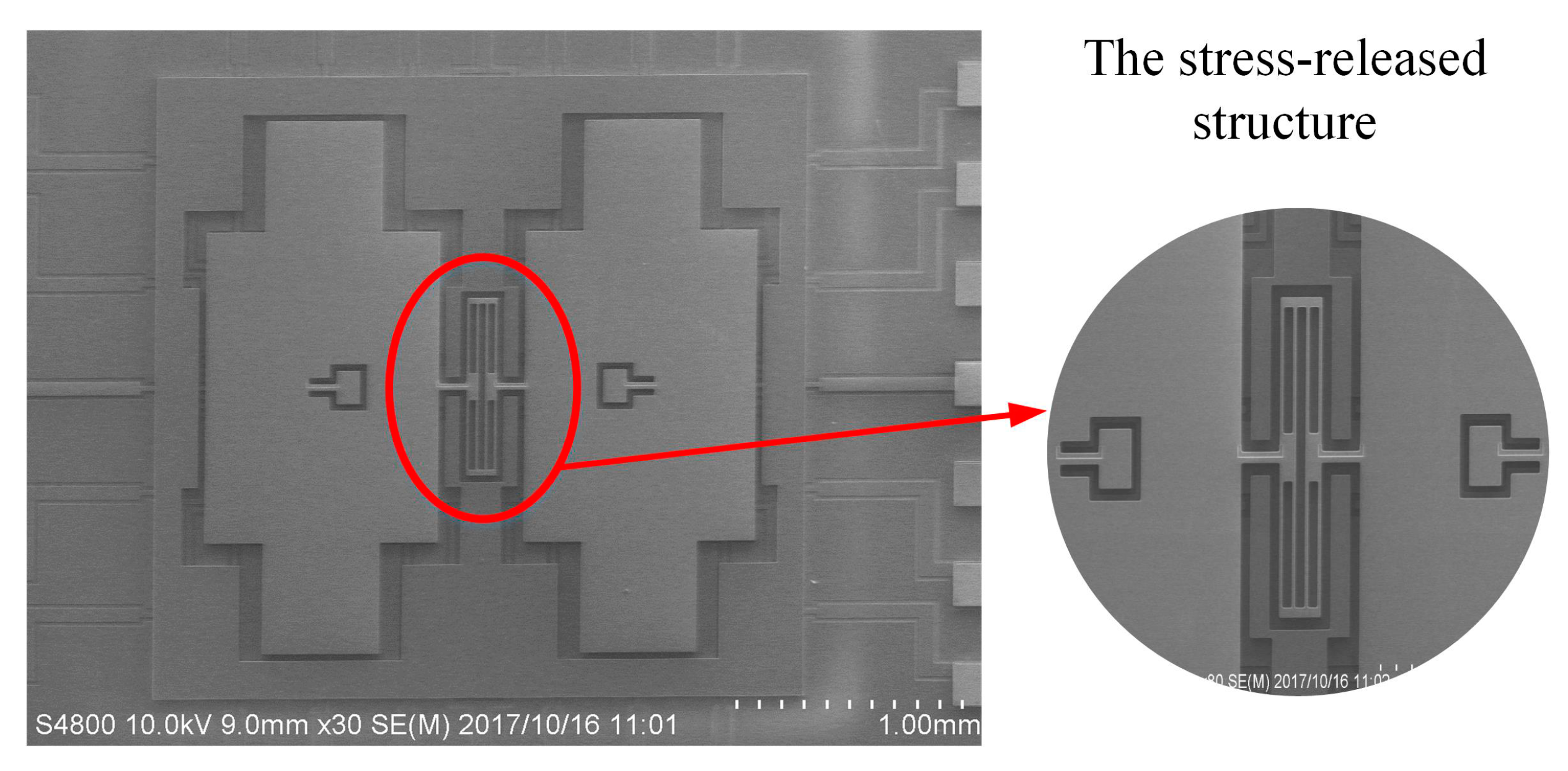
3. The Optimization of the Stress-Released Structure of the BFVG
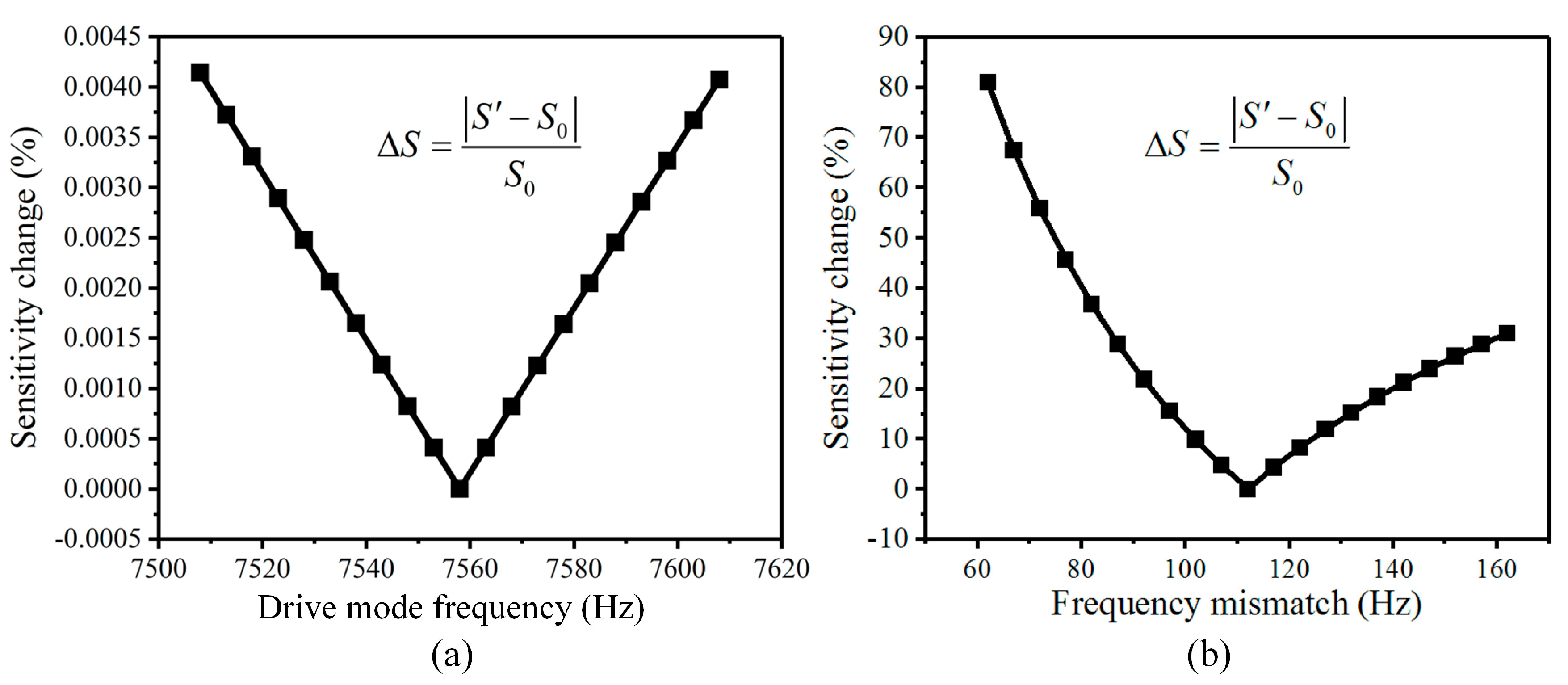
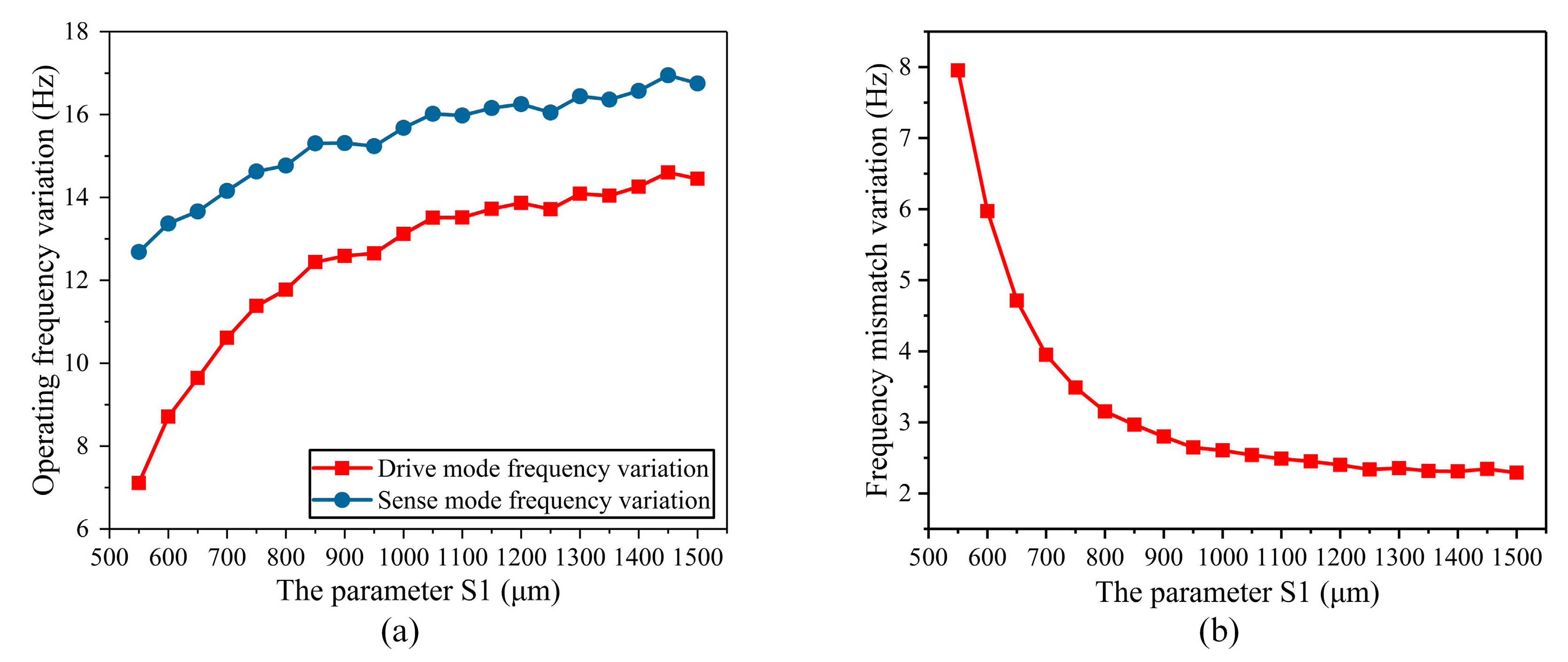
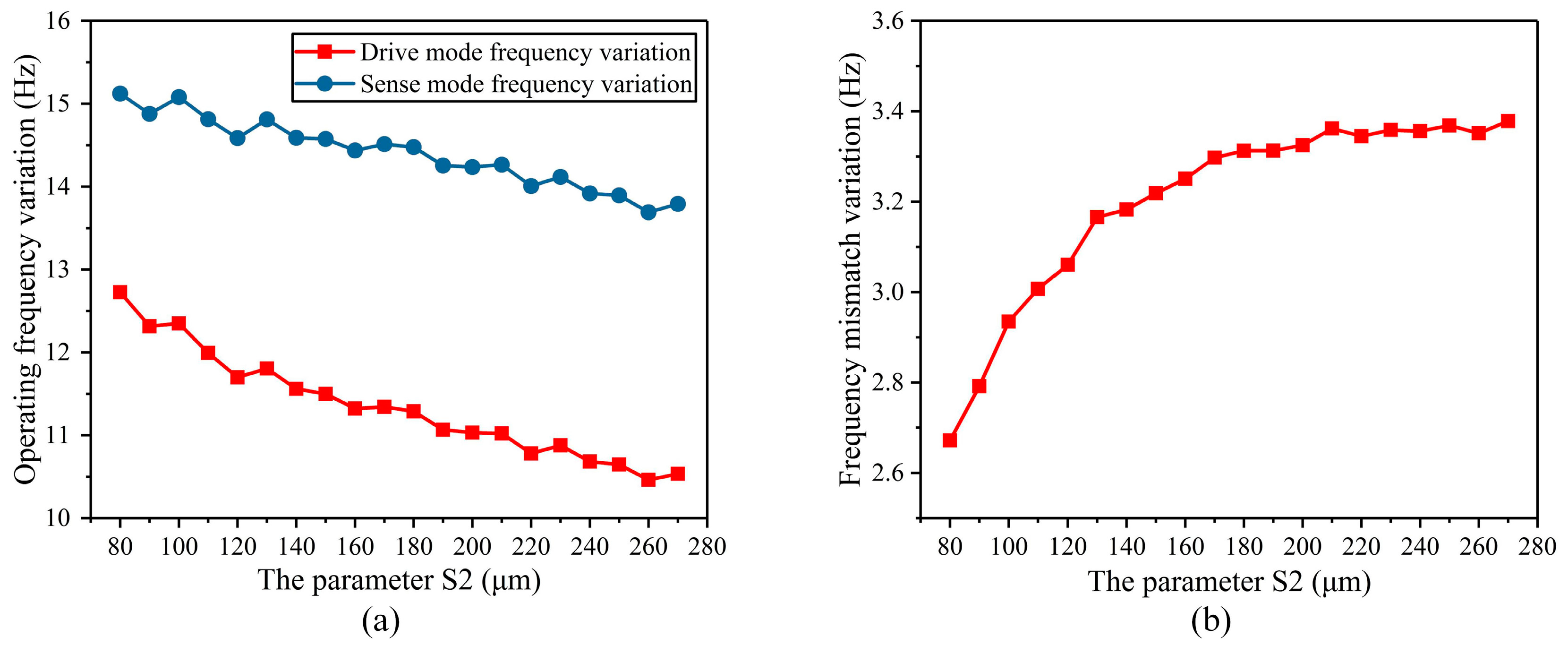
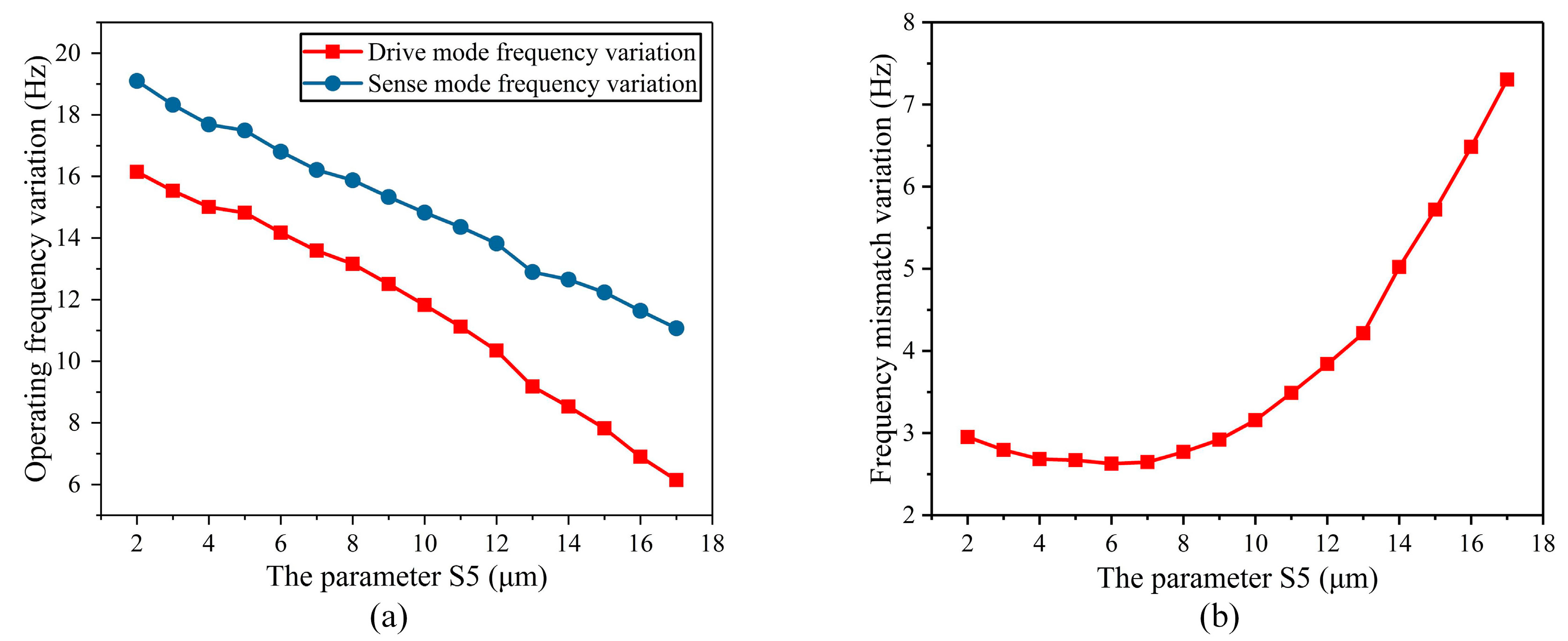
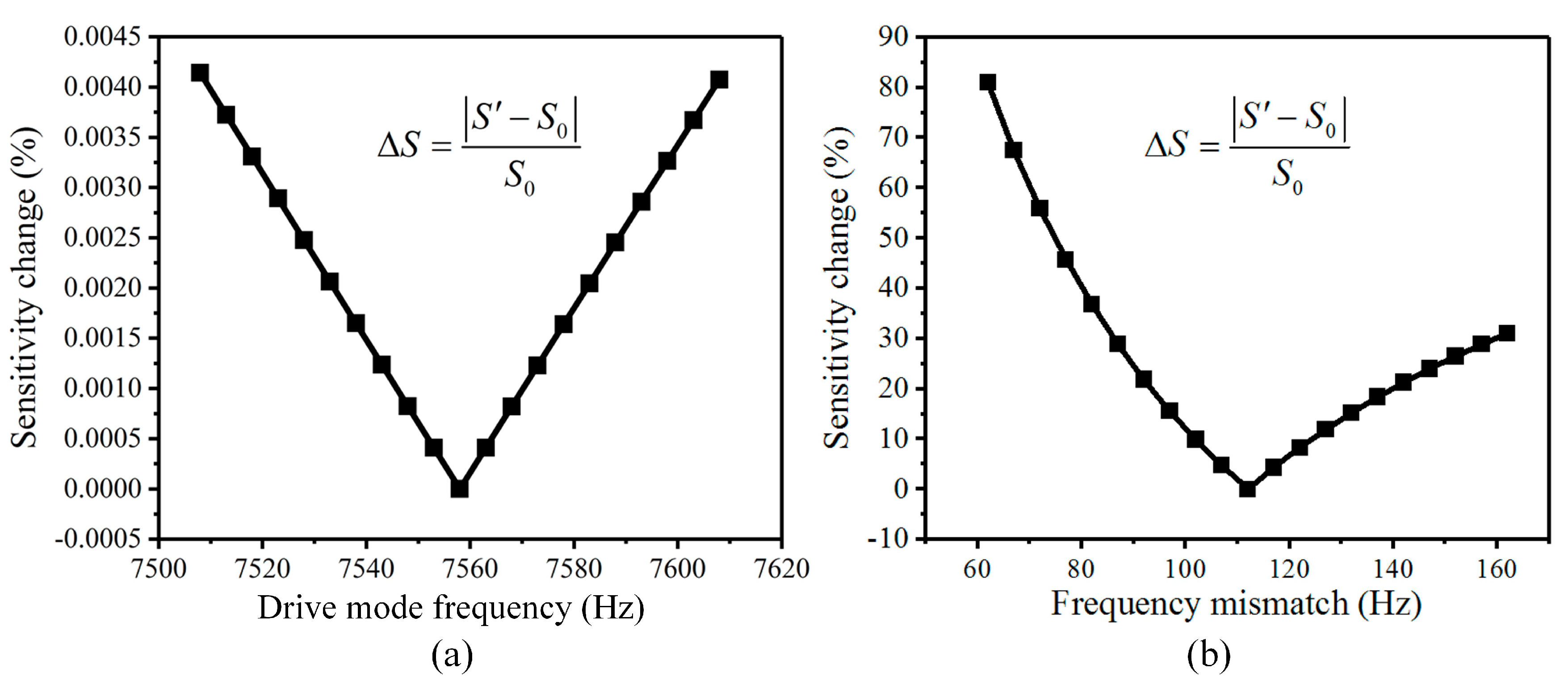
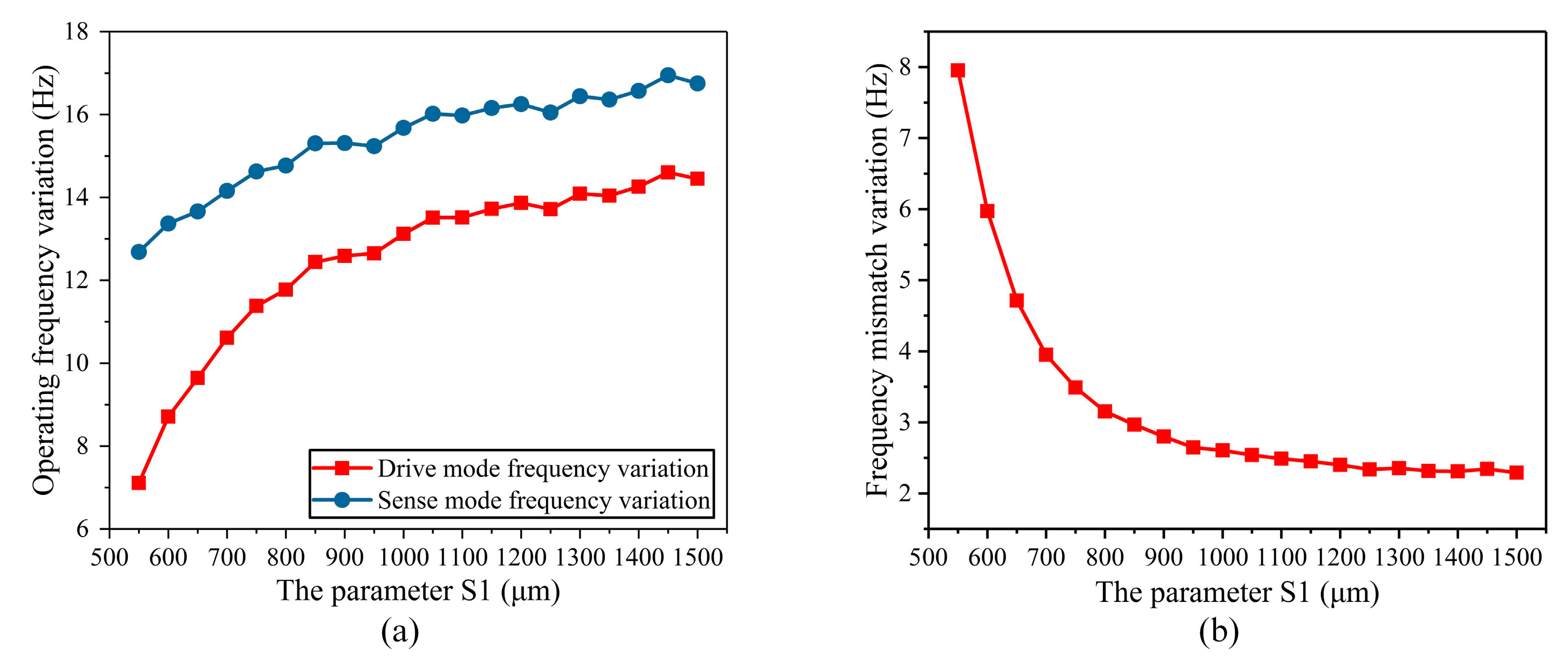
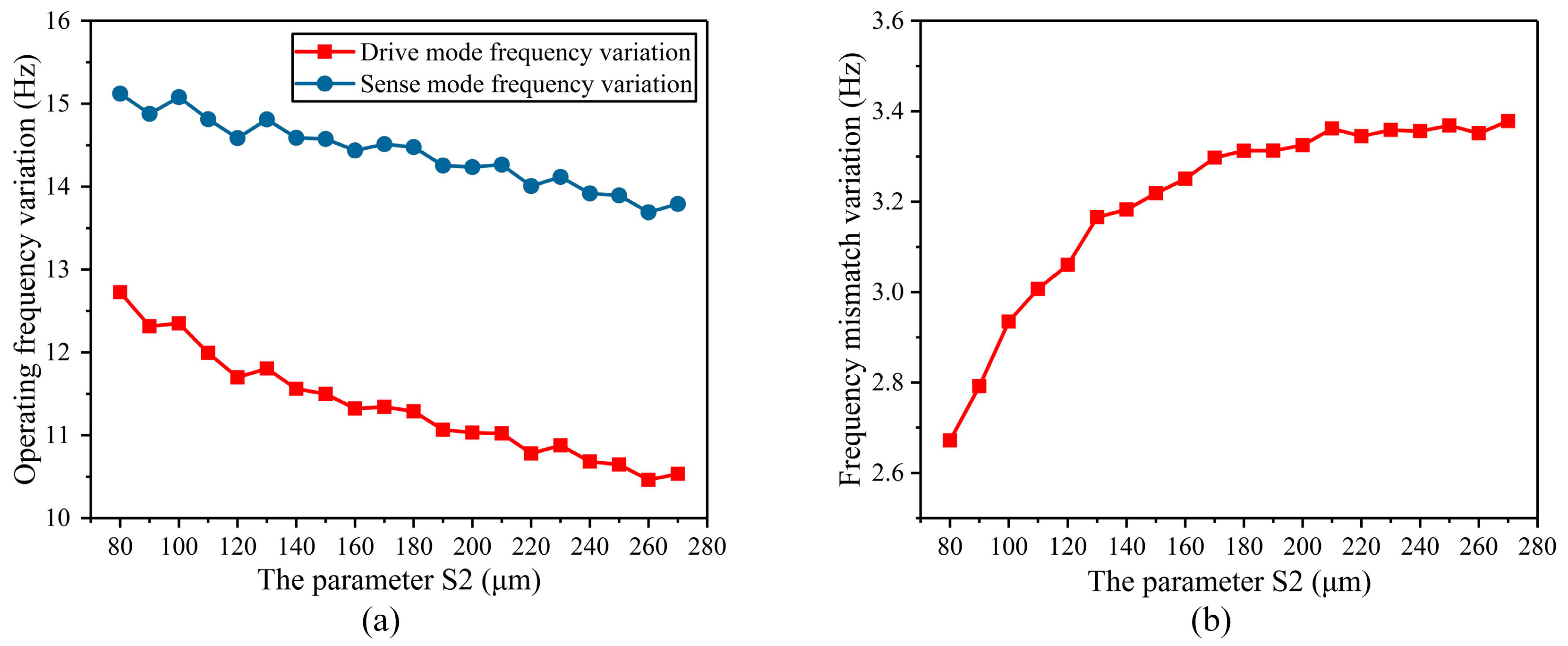
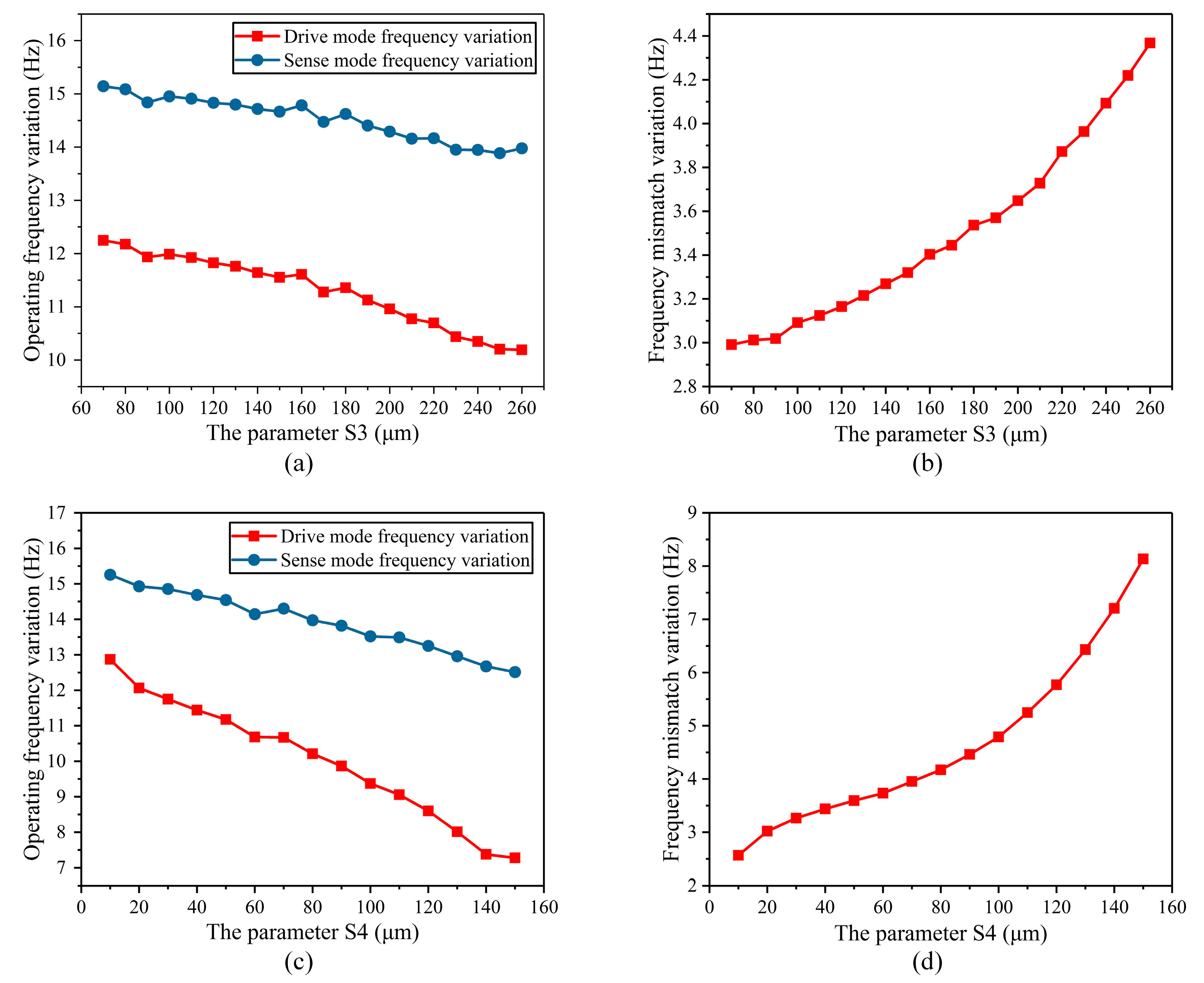
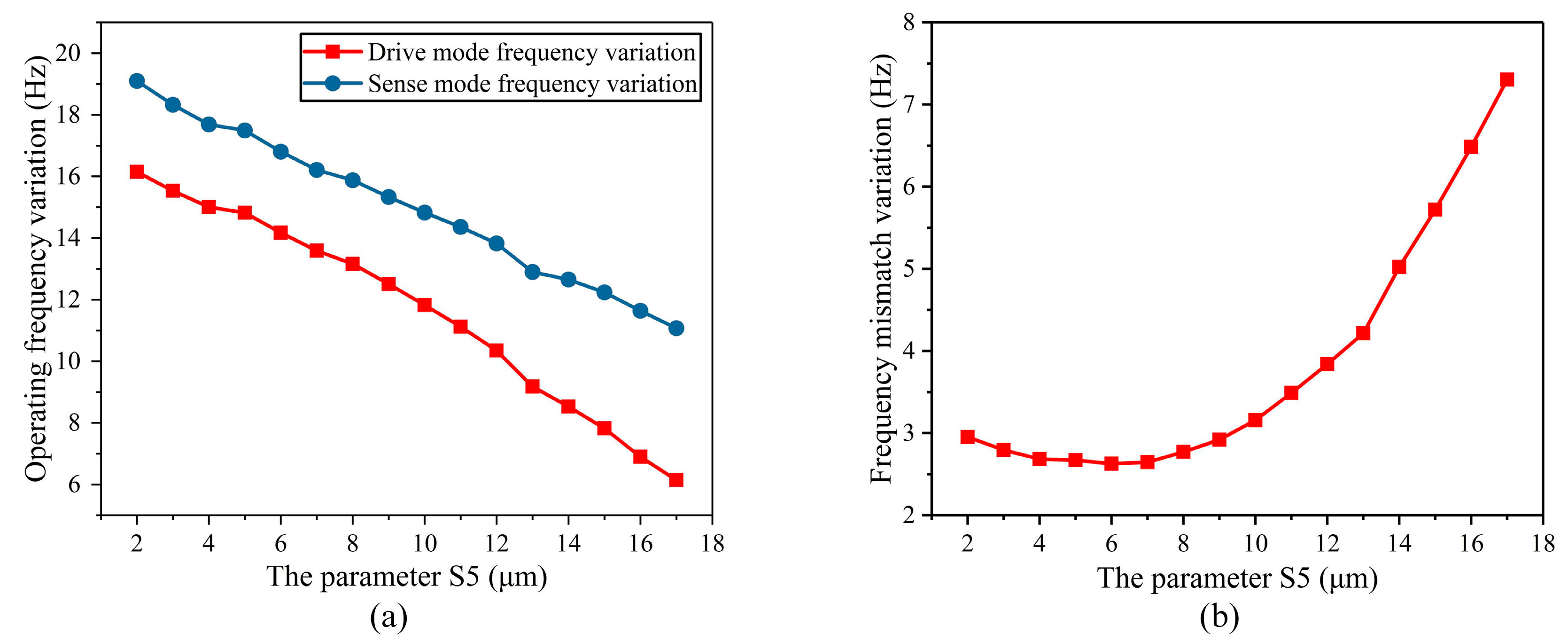
3.1. Optimization of Stress-Released Structural Parameters of the BFVG
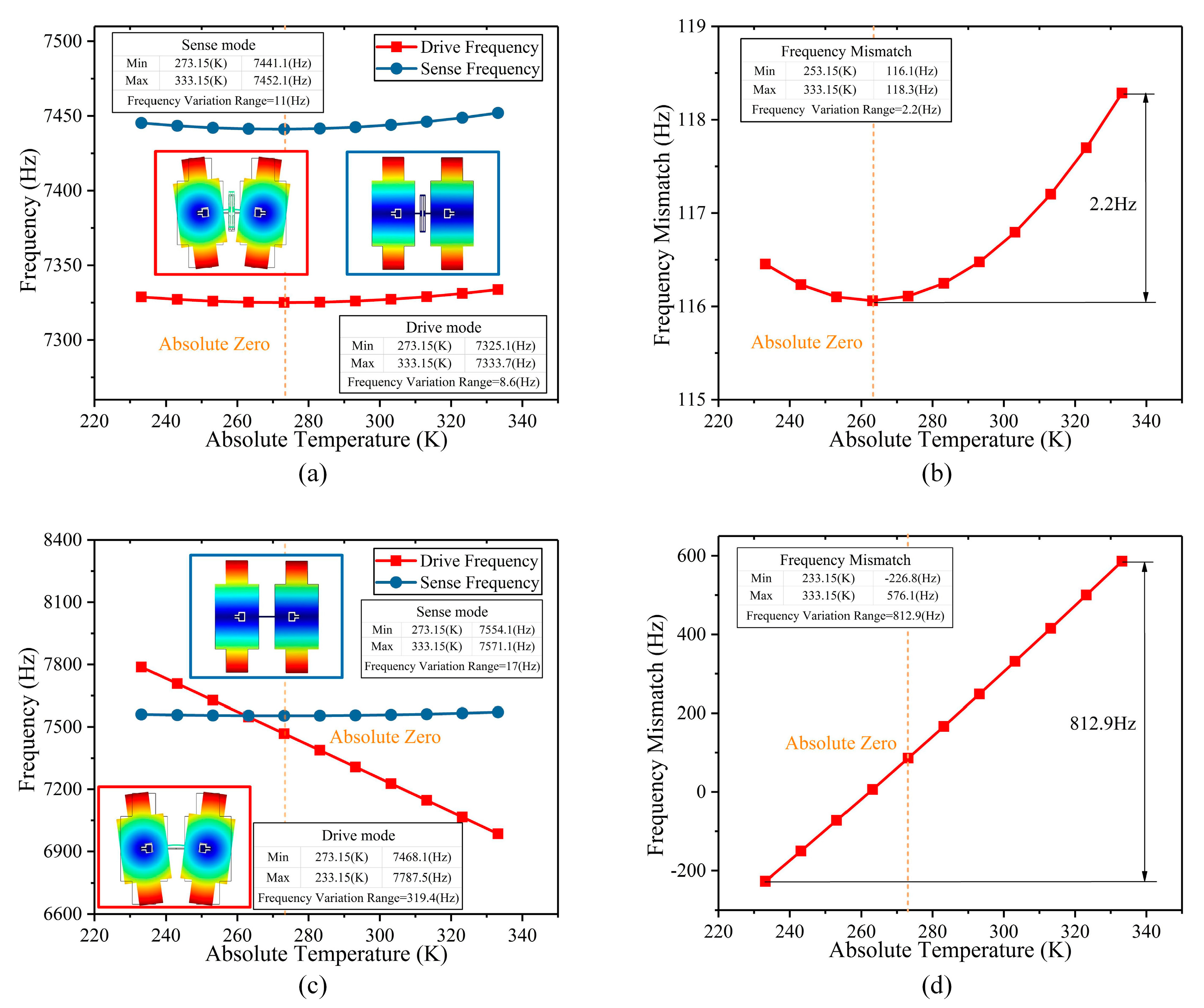
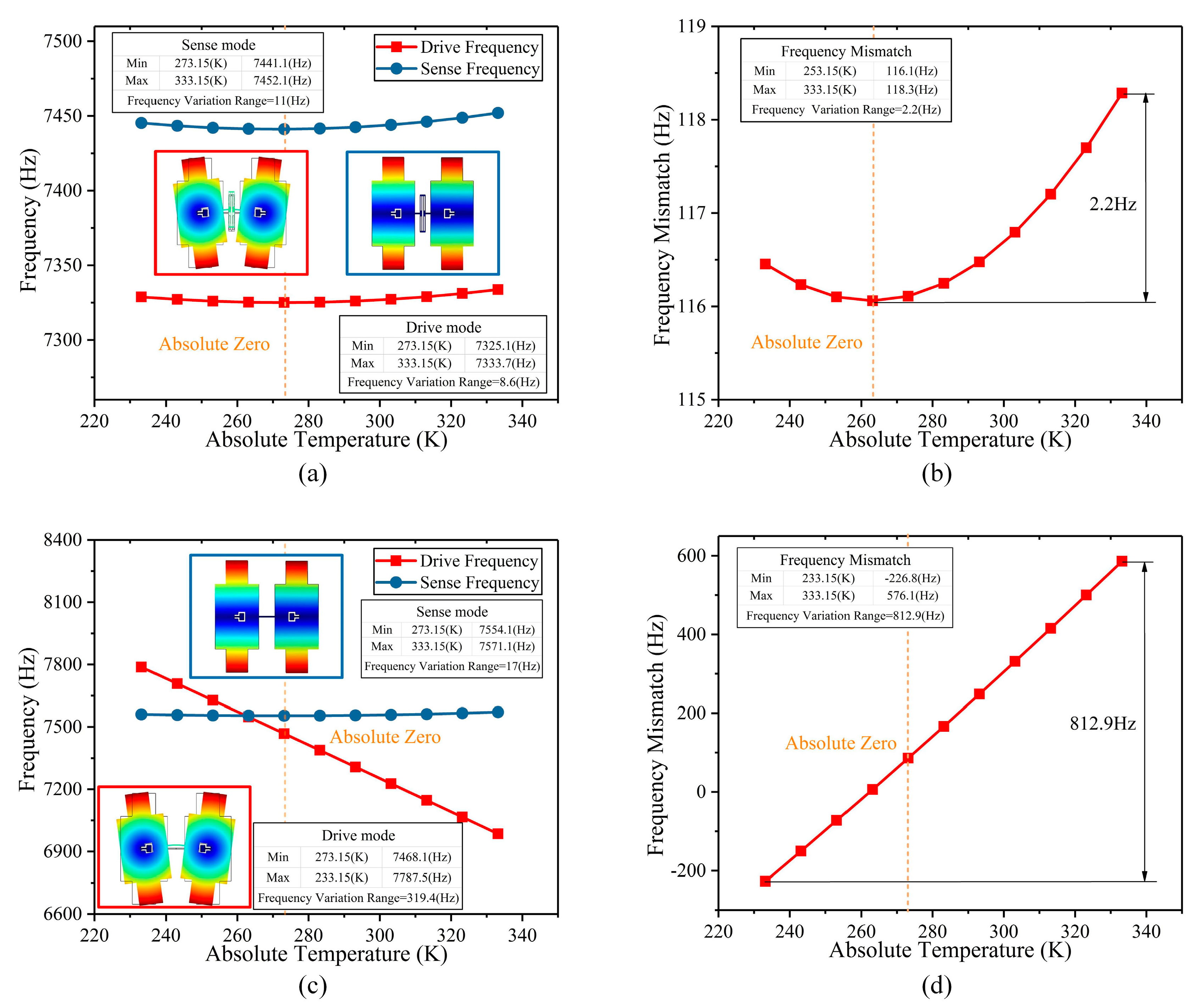
3.2. Thermal Stress Analysis of the BFVG
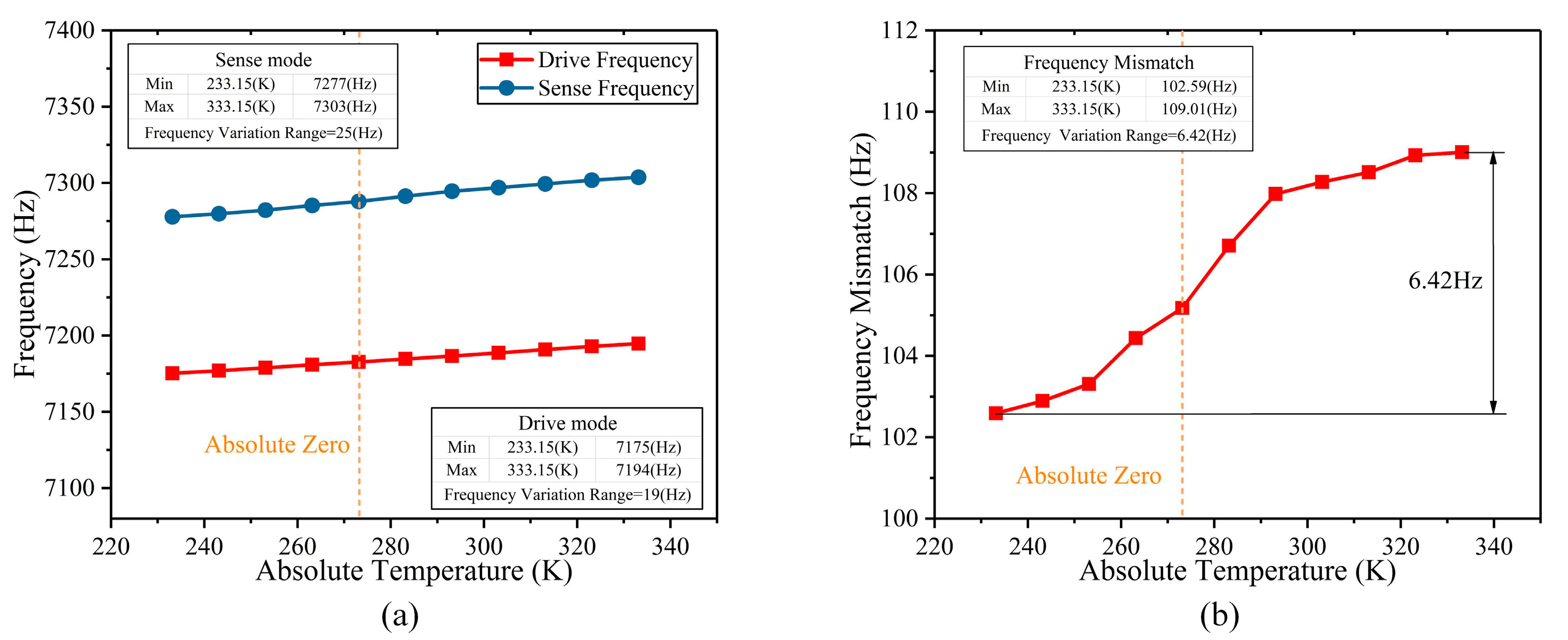
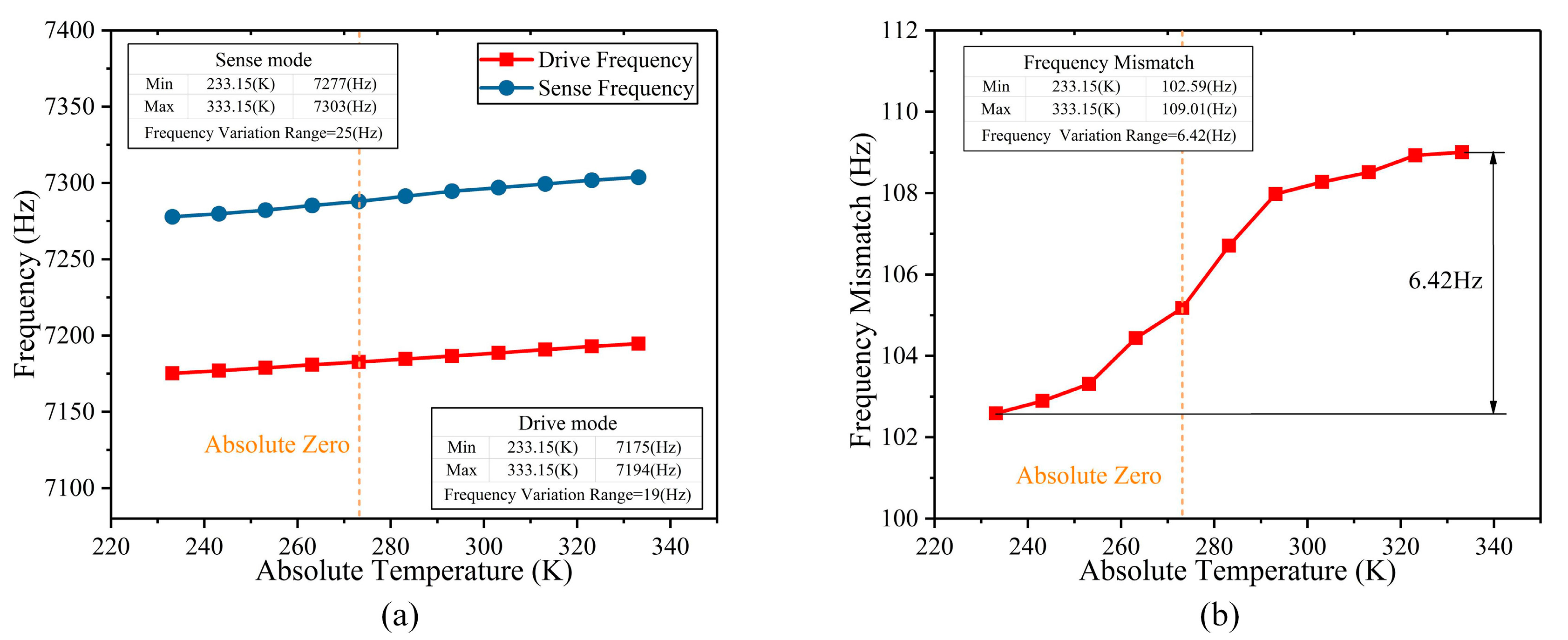
4. The Performance Test of the BFVG
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, R.; Cheng, P.; Xie, F.; Young, D.; Hao, Z. A multiple-beam tuning-fork gyroscope with high quality factors. Sens. Actuators A 2011, 166, 22–33. [Google Scholar]
- Trusov, A.A.; Schofield, A.R.; Shkel, A.M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering. Sens. Actuators A 2011, 165, 26–34. [Google Scholar]
- Maenaka, K.; Fujita, T.; Konishi, Y.; Maeda, M. Analysis of a highly sensitive silicon gyroscope with cantilever beam as vibrating mass. Sens. Actuators 1996, 54, 568–573. [Google Scholar] [CrossRef]
- Andersson, G.I.; Hedenstierna, N.; Svensson, P.; Pettersson, H. A novel silicon bulk gyroscope. J. Ext. Abstr. Transducers 1999, 1, 902–905. [Google Scholar]
- Acar, C.; Shkel, A. MEMS Vibratory Gyroscopes; Springer: Berlin, Germany, 2008. [Google Scholar]
- Cho, J.Y. High-Performance Micromachines Vibratory Rate-and Rate-Integrating Gyroscopes. Ph.D. Thesis, The University of Michigan, Ann Arbor, MI, USA, 2012. [Google Scholar]
- Chen, T.; Lee, H.; Vahala, K.J. Thermal stress in silica-on-silicon disk resonators. Appl. Phys. Lett. 2013, 102, 756–774. [Google Scholar] [CrossRef]
- Huang, S.; Zhang, X. Gradient residual stress induced elastic deformation of multilayer MEMS structures. Sens. Actuators. A 2007, 134, 177–185. [Google Scholar] [CrossRef]
- Dunn, M.L.; Zhang, Y.H.; Bright, V.M. Deformation and structural stability of layered plate microstructures subjected to thermal loading. J. Micro-Electro-Mech. Syst. 2002, 11, 372–384. [Google Scholar] [CrossRef]
- Hou, Z.Q.; Xiao, D.; Wu, X. Effect of Axial Force on the Performance of Micromachined Vibratory Rate Gyroscopes. Sensors 2011, 134, 296–309. [Google Scholar] [CrossRef]
- Hou, Z.Q.; Xiao, D.; Wu, X. Effect of die attachment on key dynamical parameters of micromachined gyroscopes. Microsyst. Technol. 2012, 18, 507–513. [Google Scholar] [CrossRef]
- Hou, Z.Q.; Chen, Z.; Wu, X.; Su, J.; Xiao, D. Transition interface for improving the temperature characteristics of micromachined gyroscopes. Microsyst. Technol. Micro Nanosyst. Inf. Storage Process Syst. 2014, 20, 227–234. [Google Scholar] [CrossRef]
- Xia, D.; Chen, S.; Wang, S.; Li, H. Microgyroscope Temperature Effects and Compensation-Control Methods. Sensors 2009, 9, 8349–8376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ko, H.; Cho, O.I. Highly programmable temperature compensated readout circuit for capacitive microaccelerometer. Sens. Actuators A 2010, 158, 72–83. [Google Scholar] [CrossRef]
- Dai, G.; Li, W.; He, X.; Du, L.; Shao, B.; Su, W. Thermal drift analysis using a multiphysics model of bulk silicon MEMS capacitive accelerometer. Sens. Actuators A 2011, 172, 369–378. [Google Scholar]
- Joo, J.; Choa, S. Deformation Behavior of MEMS Gyroscope Sensor Package Subjected to Temperature Change. IEEE Trans. Compon. Packag. Technol. 2007, 30, 346–354. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, S.W.; Najafi, K. A Generic Environment-Resistant Packaging Technology for MEMS. In Proceedings of the Conference on International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007. [Google Scholar]
- Qin, Q.; Zhu, Y. Temperature Control in Thermal Microactuators with Applications to in-situ Nanomechanical Testing. Appl. Phys. Lett. 2013, 102, 013101–013105. [Google Scholar] [CrossRef]
- Maeda, D.; Ono, K.; Giner, J. MEMS Gyroscope with Less than 1-deg/h Bias Instability Variation in Temperature Range from −40 °C to 125 °C. Sensors 2018, 18, 1006–1015. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Y.; Xu, X. Research on the Method to Improve the Vibration Stability of Vibratory Cylinder Gyroscopes under Temperature Variation. Int. J. Precis. Eng. Manuf. 2017, 18, 1813–1819. [Google Scholar] [CrossRef]
- Gripton, A. The application and future development of a MEMS SiVS® for commercial and military inertial products. In Proceedings of the Conference on Position Location and Navigation Symposium, Palms Springs, CA, USA, 15–18 April 2002. [Google Scholar]
- Sturland, I. Development and commercialisation of silicon MEMS gyroscopes. In Proceedings of the Conference on The IEE Seminar and Exhibition on MEMS Sensor Technologies, London, UK, 25 April 2005. [Google Scholar]
- Fell, C.P. Development of a Second Generation Low Cost MEMS Gyroscope: Design for Manufacture. In Proceedings of the Conference on Seminar on Mems Sensors & Actuators, London, UK, 28 April 2006. [Google Scholar]
- Zaman, M.F.; Sharma, A.; Ayazi, F. The Resonating Star Gyroscope: A Novel Multiple-Shell Silicon Gyroscope with Sub-5 deg/hr Allan Deviation Bias Instability. IEEE Sens. J. 2009, 9, 616–624. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, R.; Zhang, T. A Center-Supported Four-Mass Block Six-Axis Inertial Vibratory MEMS Gyroscope, China. International Patent Application CN106932609A, 7 July 2017. [Google Scholar]
- Hedenstierna, N.; Habibi, S.; Nilsen, S.M.; Kvisterøy, T.; Jensen, G.U. Bulk micromachined angular rate sensor based on the ‘butterfly’-gyro structure. In Proceedings of the Technical Digest. MEMS 2001. the 14th IEEE International Conference on InMicro Electro Mechanical Systems, Interlaken, Switzerland, 25 January 2001; pp. 178–181. [Google Scholar]
- Xin, Y.; Wu, X.; Xiao, D.; Hou, Z.; He, K.; Chen, Z. A Micromachined Gyroscope with an Effective Stree-released Fram. In Proceedings of the 8th Annual IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Suzhou, China, 7–10 April 2013. [Google Scholar]
- Xiao, D.; Cao, S.; Hou, Z.; Chen, Z.; Wang, X.; Wu, X. Enhanced sensitivity in a butterfly gyroscope with a hexagonal oblique beam. AIP Adv. 2015, 5, 041331. [Google Scholar] [CrossRef] [Green Version]
- Chu, H.M.; Vu, H.N.; Hane, K. Electric feed-through for vacuum package using double-side anodic bonding of silicon-on-insulator wafer. J. Electrost. 2013, 71, 130–133. [Google Scholar] [CrossRef]
- Wang, X. Study on Temperature Stability Analysis and Optimization Method of a Butterfly Microgyroscope Sensitive Structure. Ph.D. Thesis, The National University of Defense Technology, Changsha, China, 2016. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Value |
|---|---|---|
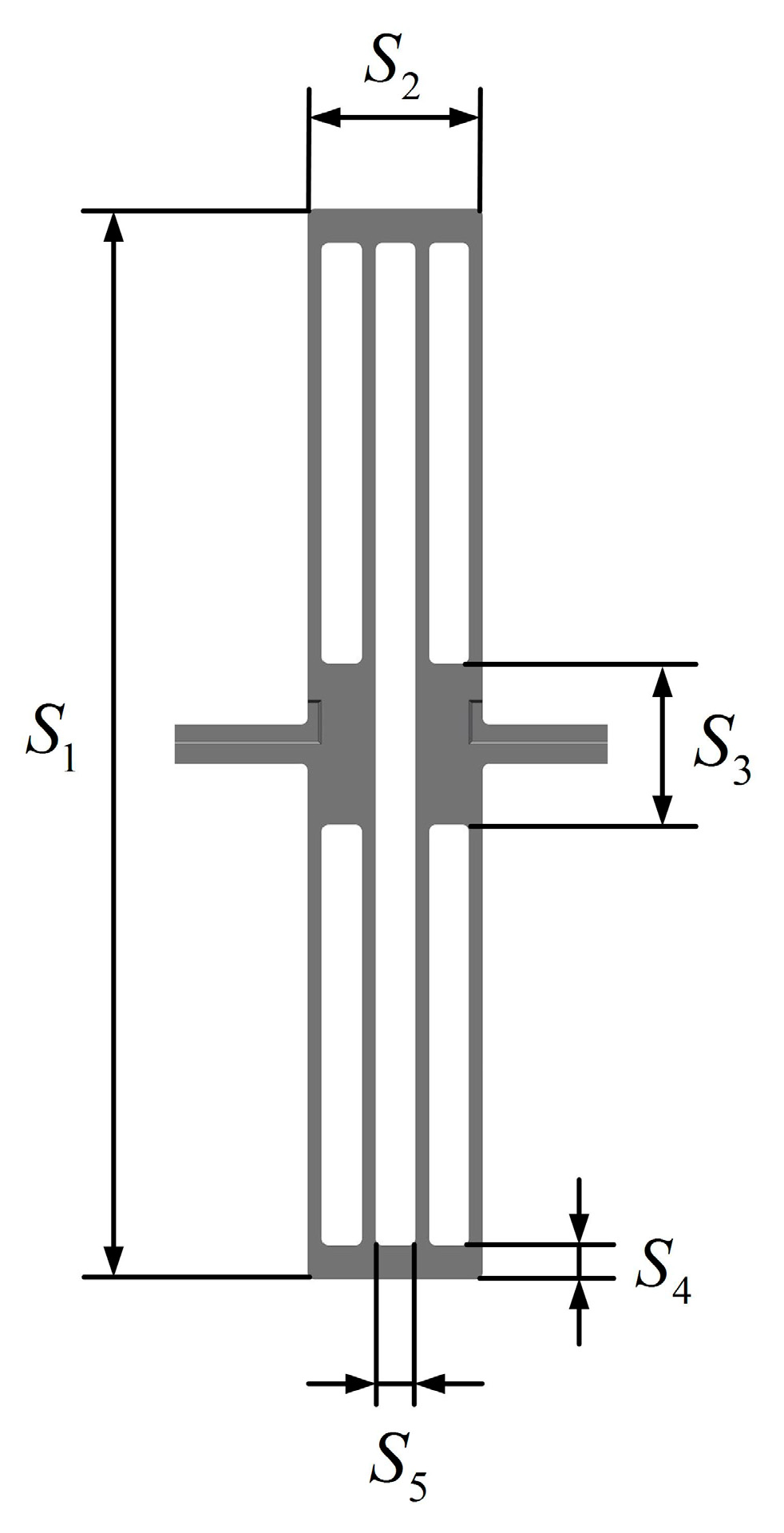
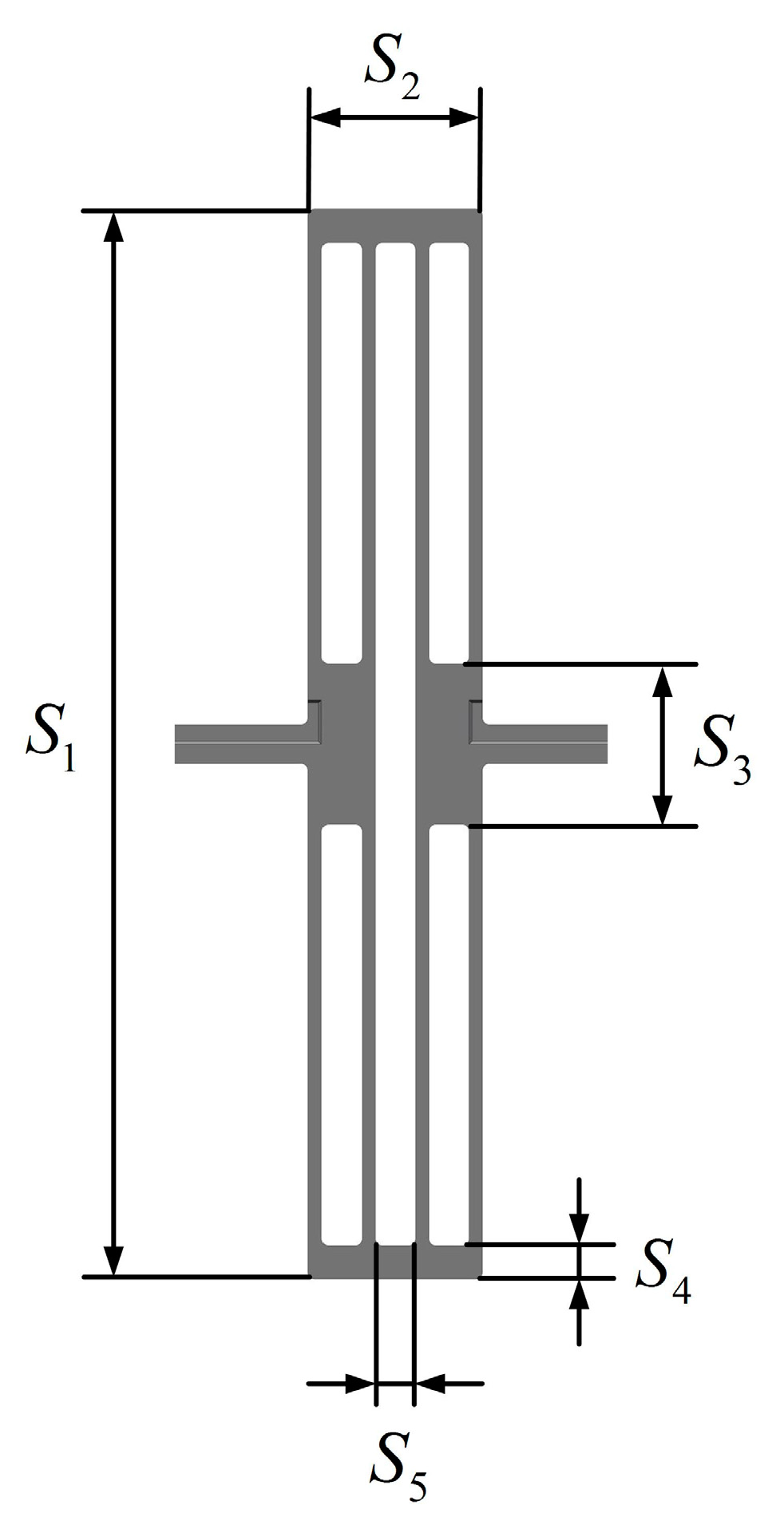
| the height of the stress-released structure | S1 | 1000 |
| the width of the stress-released structure | S2 | 130 |
| the height of the internal fixed frame of the stress-released structure | S3 | 120 |
| the outer fixed frame of the stress-released structure | S4 | 25 |
| the width of the stress-release groove | S5 | 10 |
| Definition | Value | Unit |
|---|---|---|
| Thermal Expansion Coefficient | 2.6 × 10−6 | 1/K |
| Density | 2329 | Kg/m3 |
| Young Modulus | 170 × 109 | Pa |
| Poisson Ratio | 0.28 | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ou, F.; Hou, Z.; Miao, T.; Xiao, D.; Wu, X. A New Stress-Released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope. Micromachines 2019, 10, 82. https://doi.org/10.3390/mi10020082
Ou F, Hou Z, Miao T, Xiao D, Wu X. A New Stress-Released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope. Micromachines. 2019; 10(2):82. https://doi.org/10.3390/mi10020082
Chicago/Turabian StyleOu, Fenlan, Zhanqiang Hou, Tongqiao Miao, Dingbang Xiao, and Xuezhong Wu. 2019. "A New Stress-Released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope" Micromachines 10, no. 2: 82. https://doi.org/10.3390/mi10020082
APA StyleOu, F., Hou, Z., Miao, T., Xiao, D., & Wu, X. (2019). A New Stress-Released Structure to Improve the Temperature Stability of the Butterfly Vibratory Gyroscope. Micromachines, 10(2), 82. https://doi.org/10.3390/mi10020082