A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude–Frequency Mixed Modulation in TFT Electrowetting Displays



Abstract
1. Introduction
2. Electrowetting Display (EWD) Driving Principle
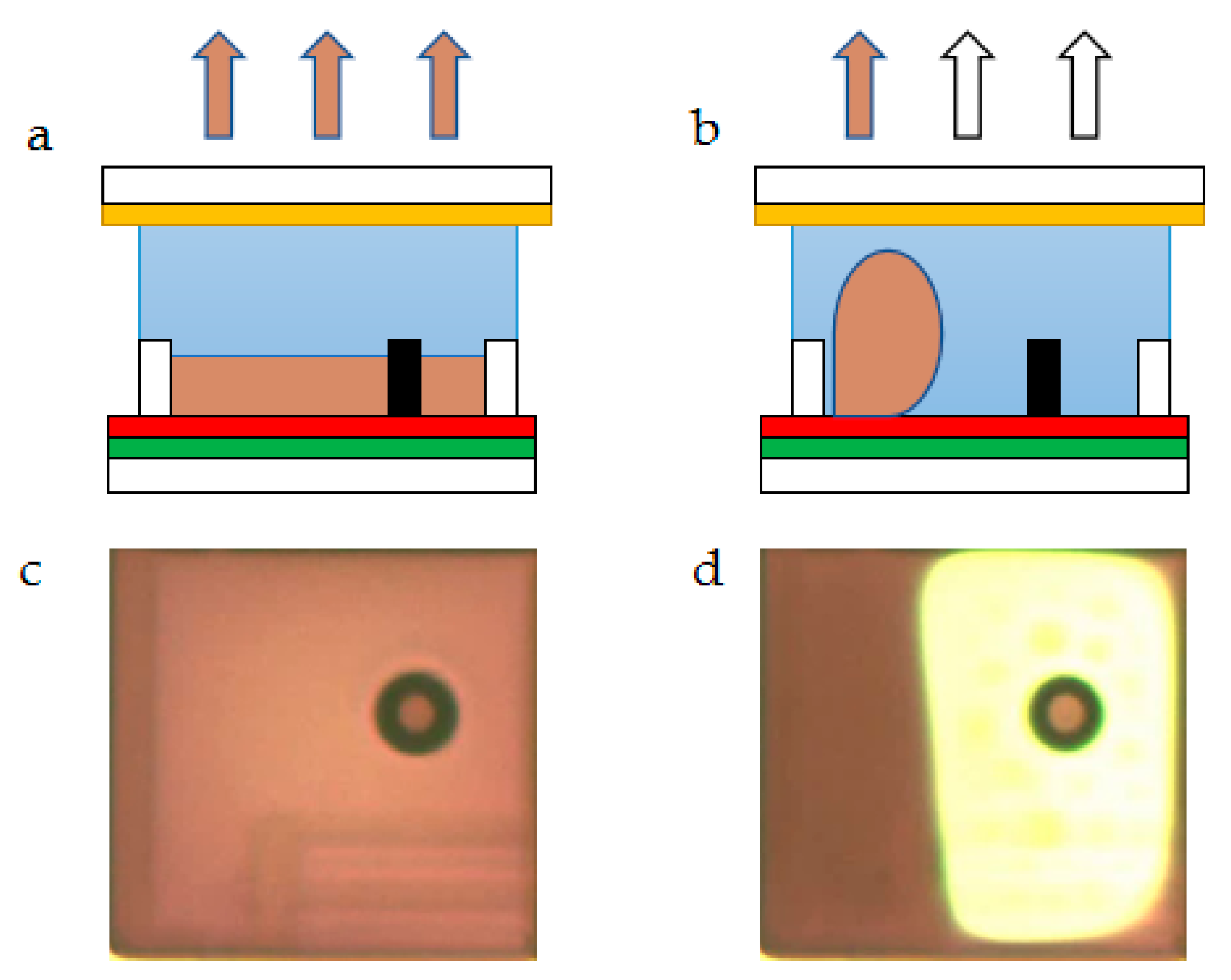
2.1. Structure of EWD
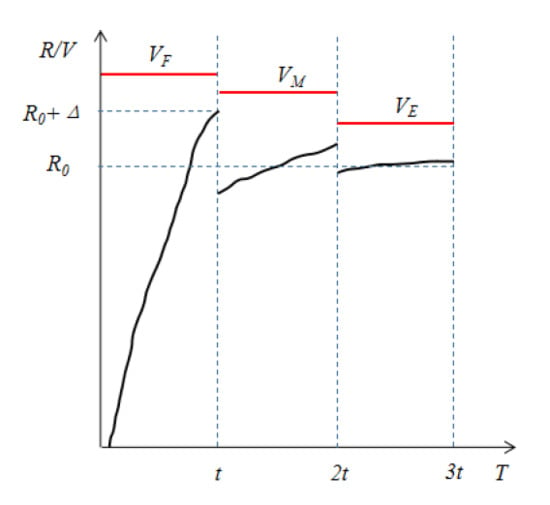
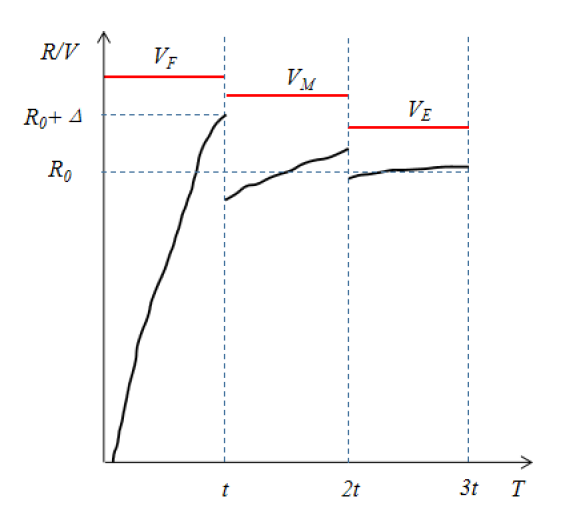
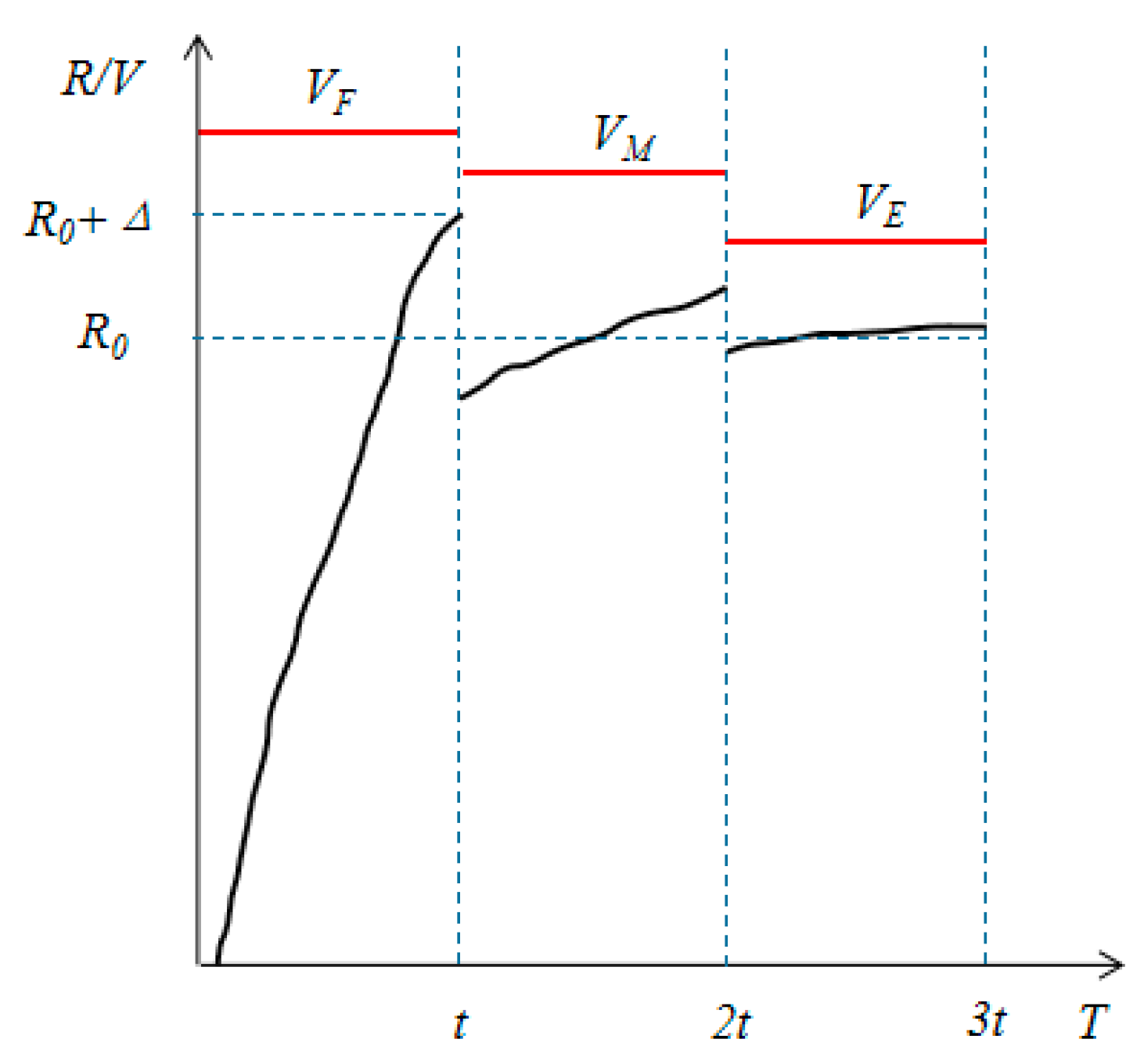
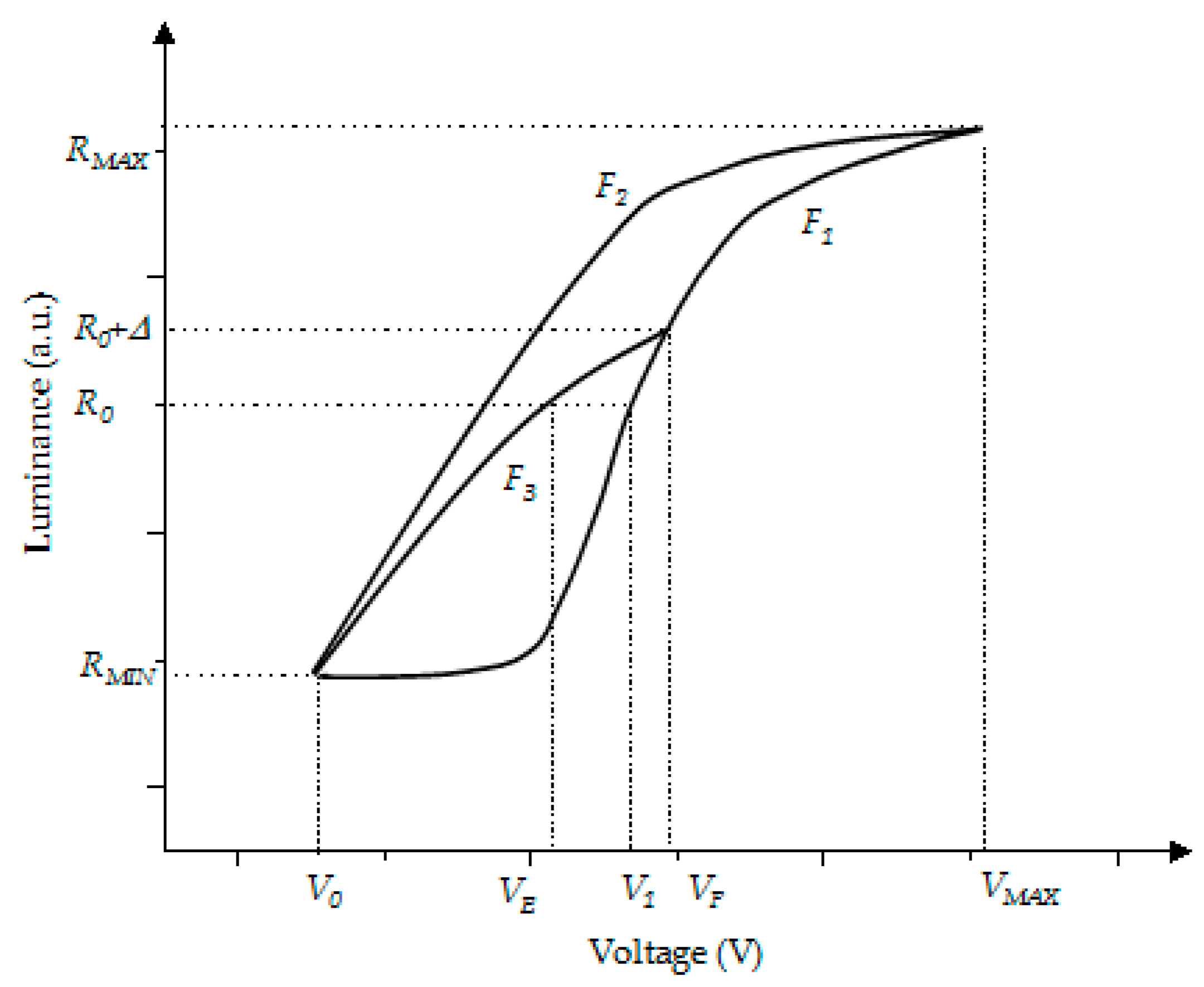
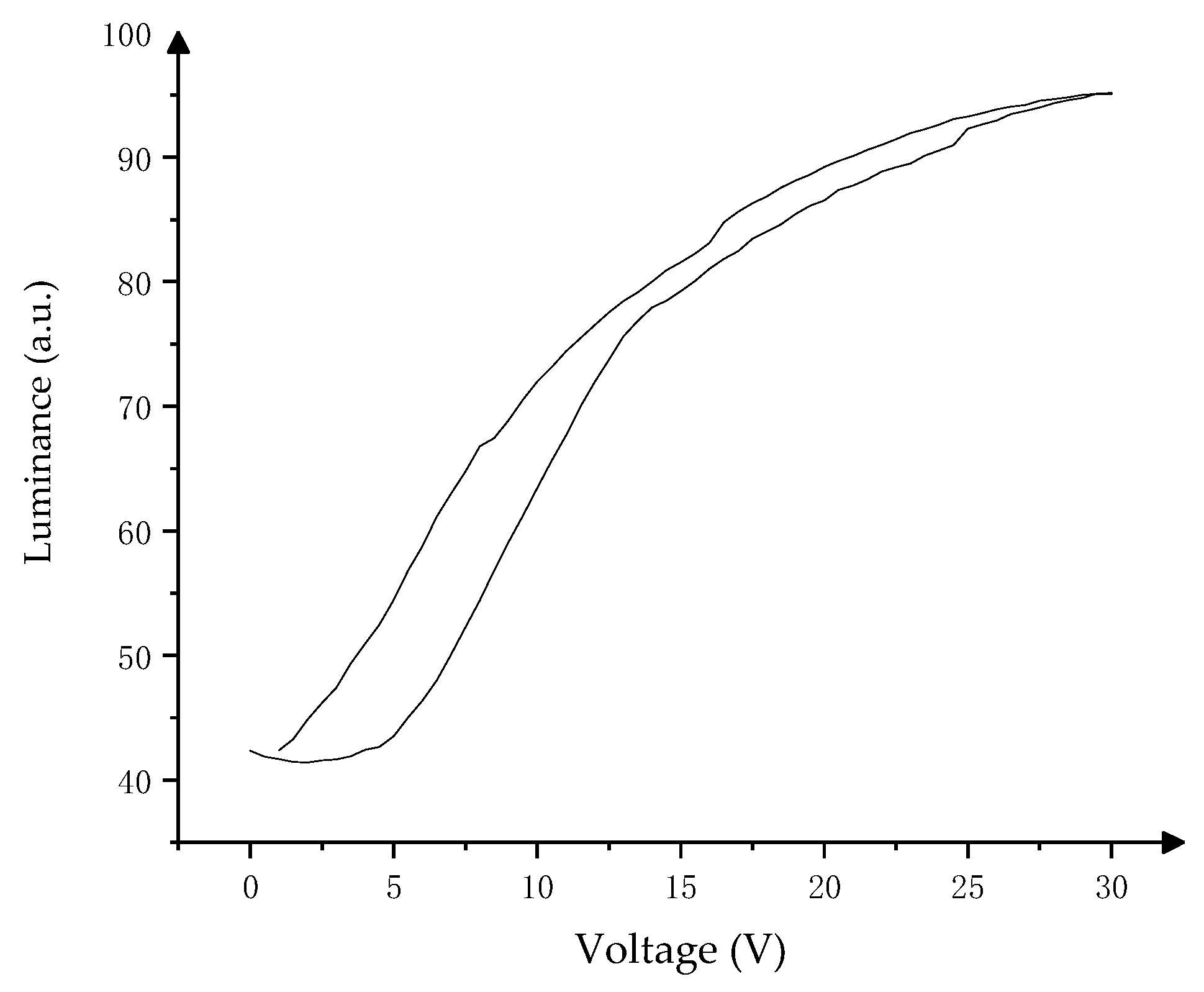
2.2. Hysteresis of EWDs
2.3. Principle of Amplitude–Frequency Mixed Modulation
3. Driving Platform Based on TFT-EWD
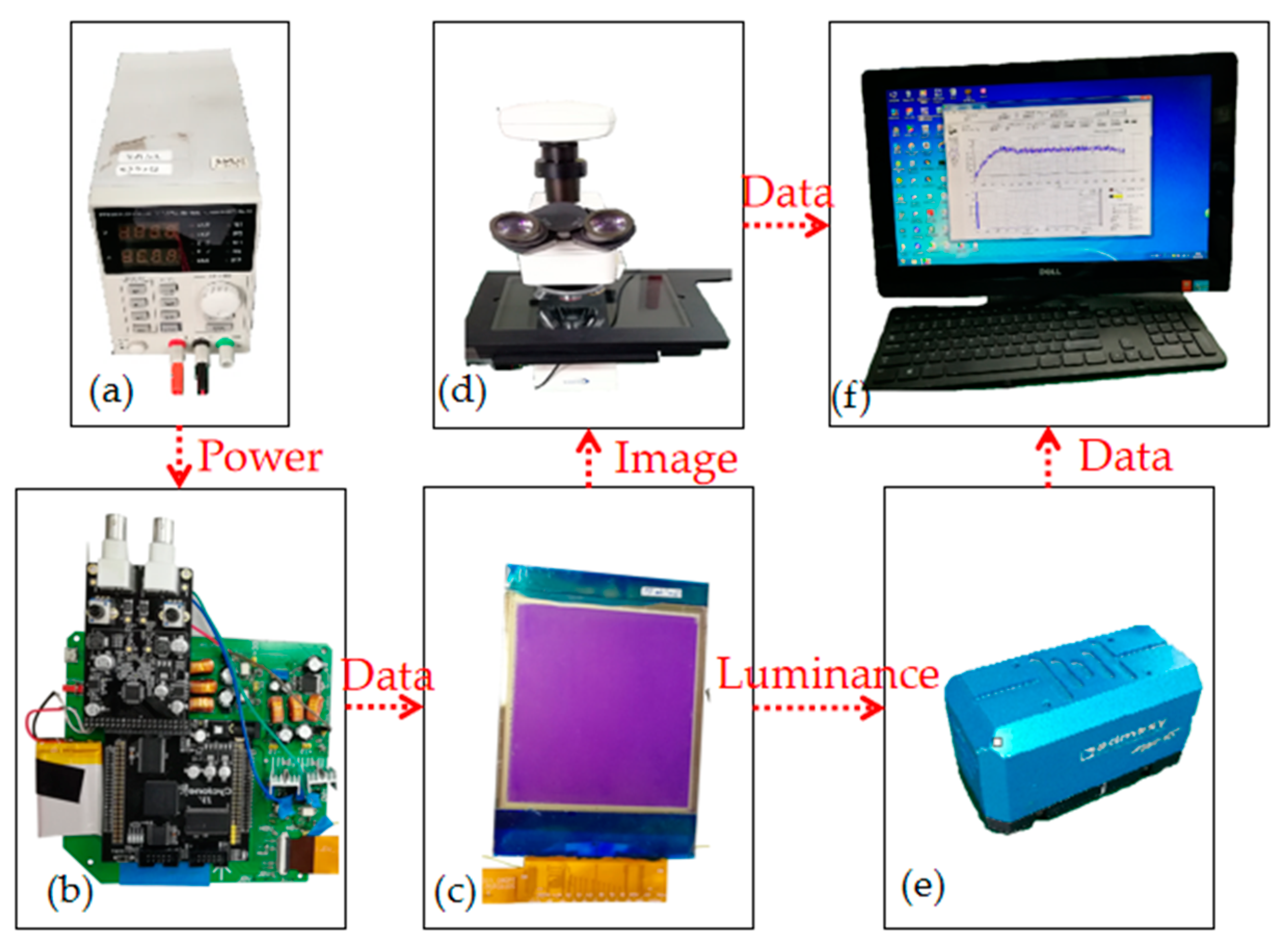
3.1. Experimental Platform
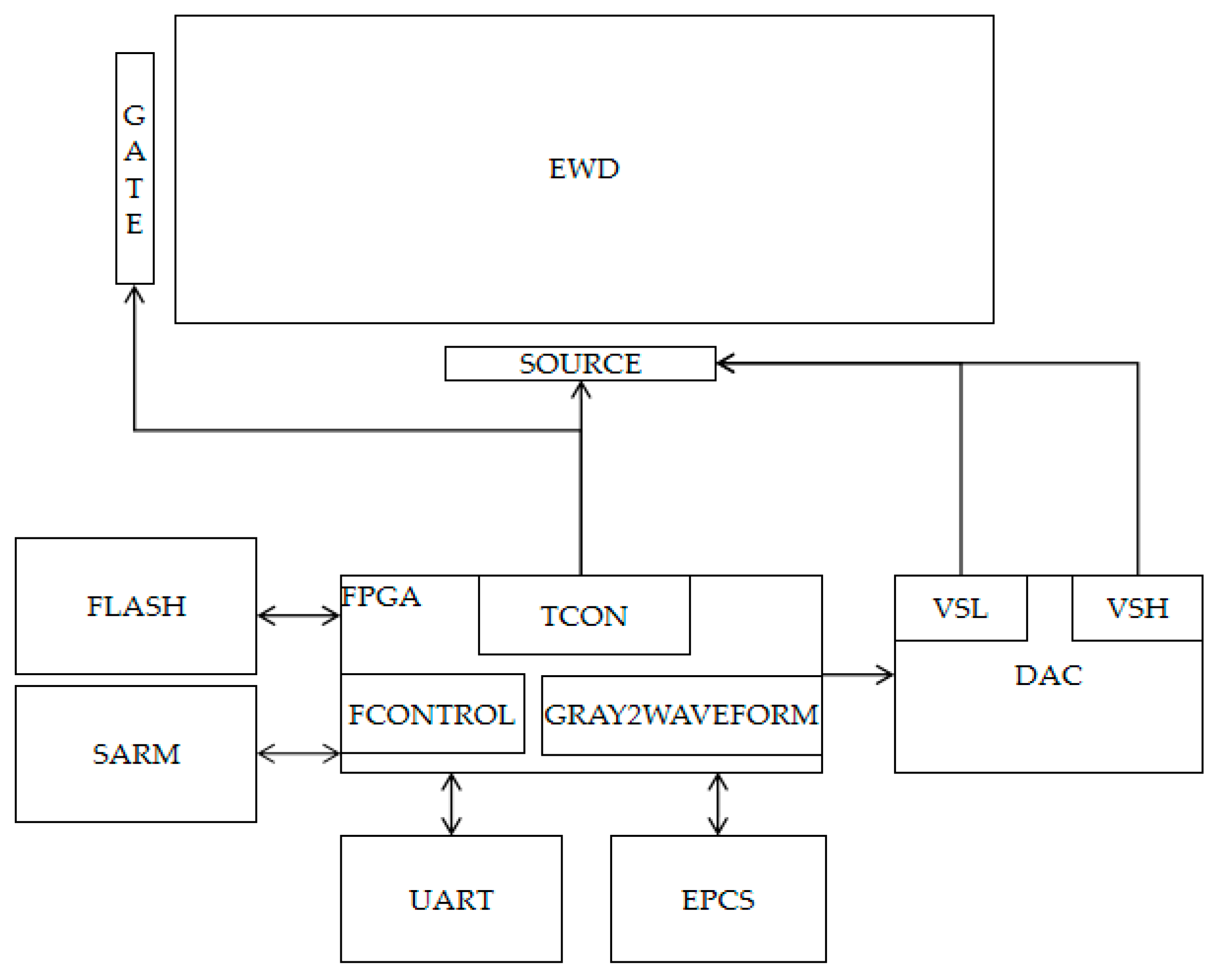
3.2. The Hardware Design of the Driving System
4. Driving Waveform Design of Amplitude–Frequency Mixed Modulation
5. Experimental Results and Discussion
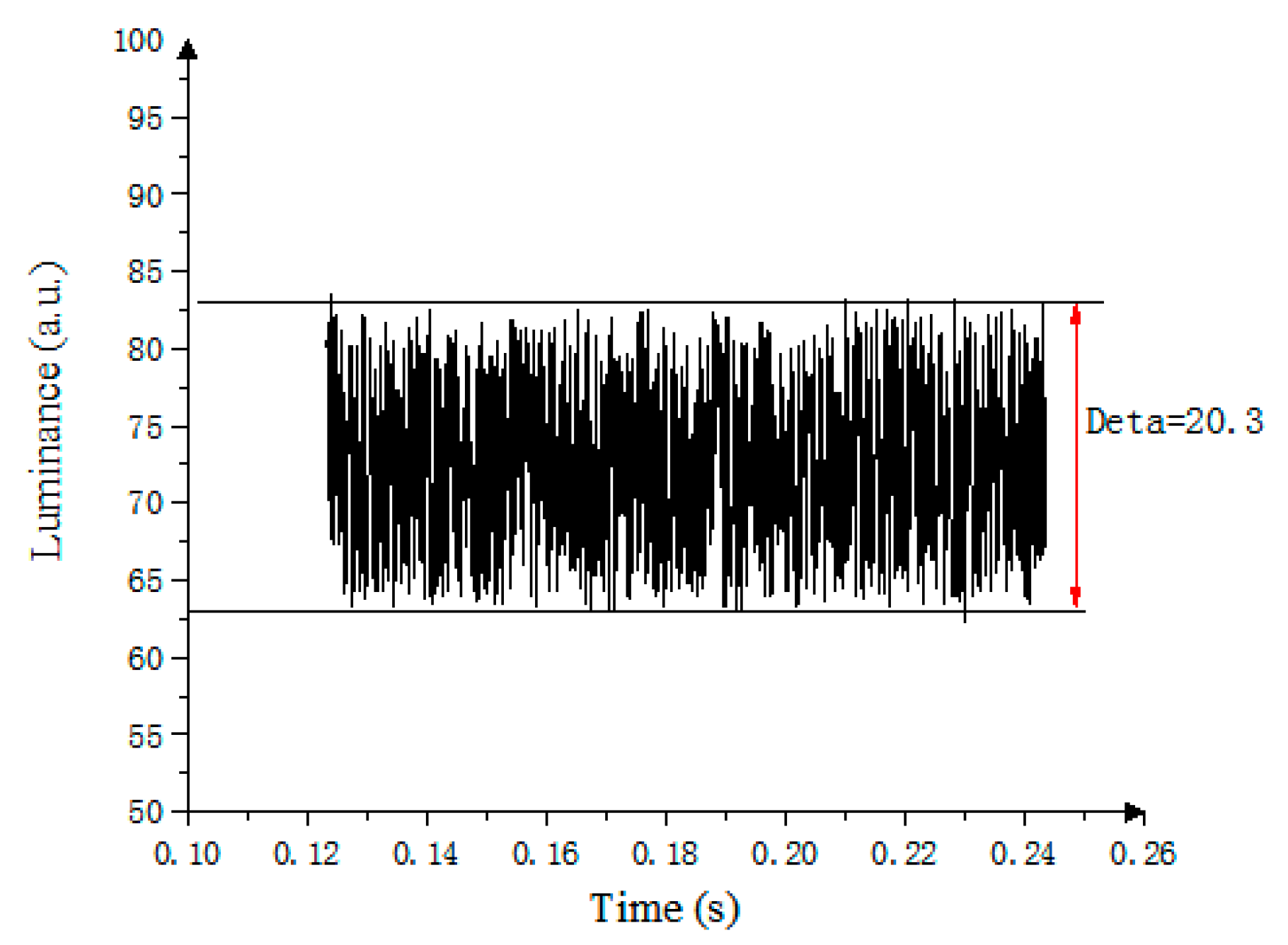
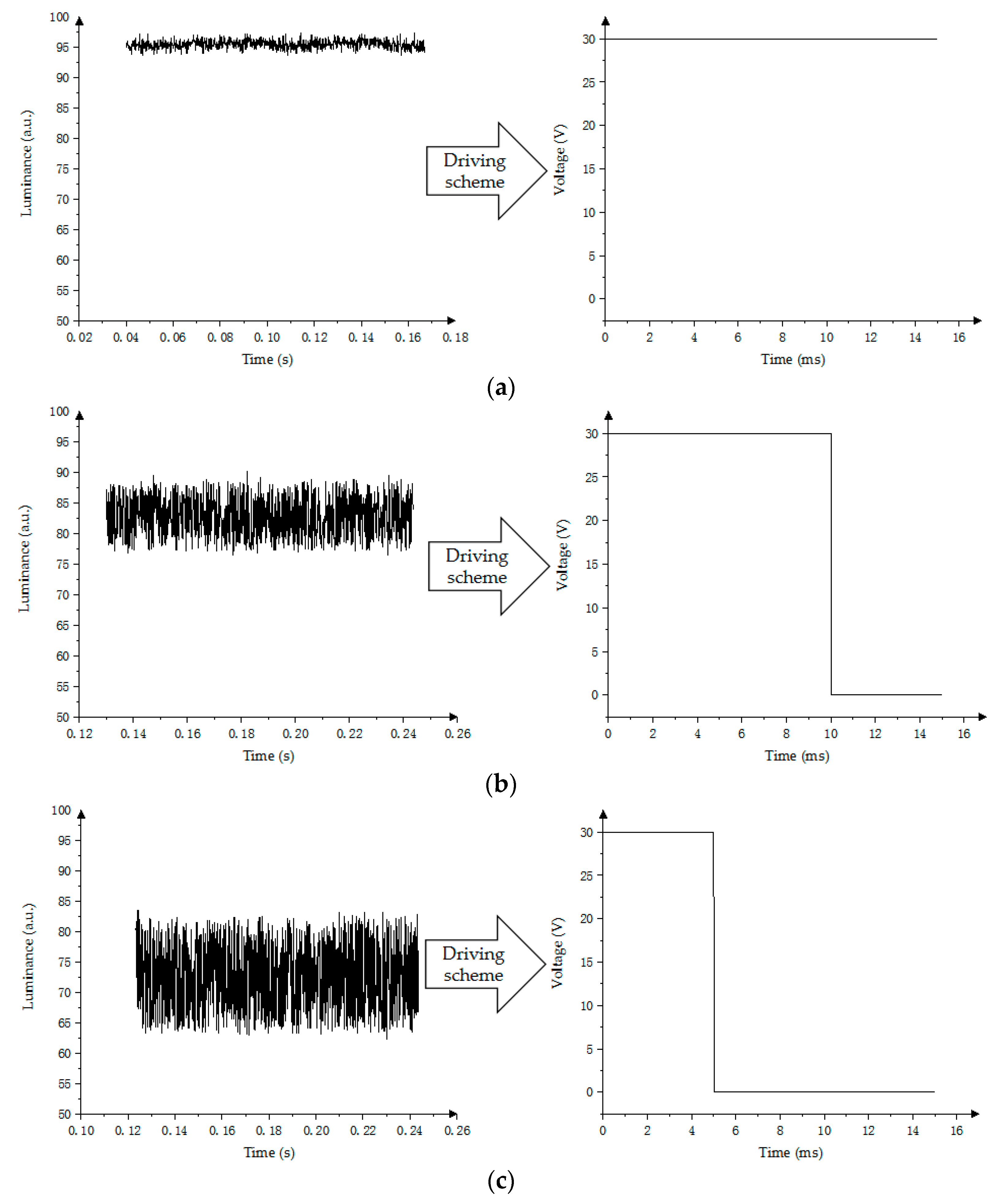
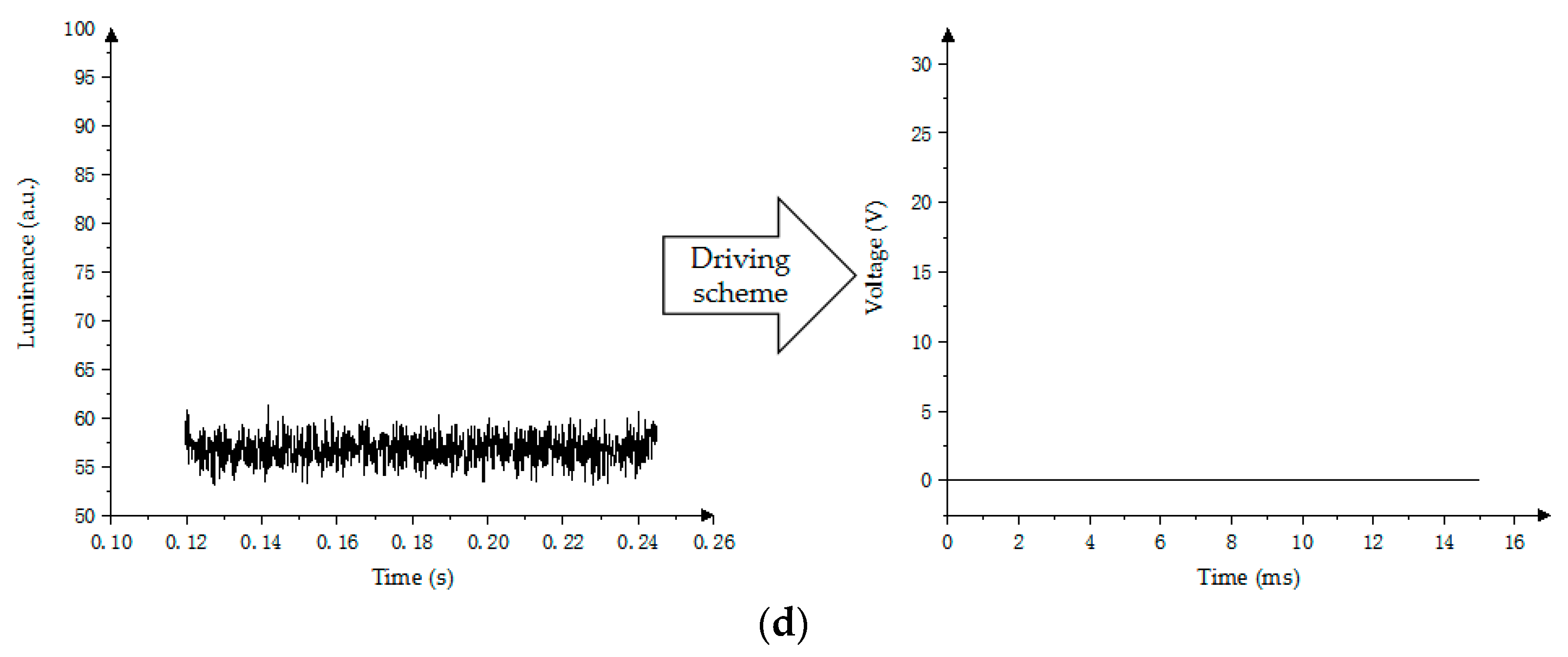
5.1. Traditional PWM Scheme
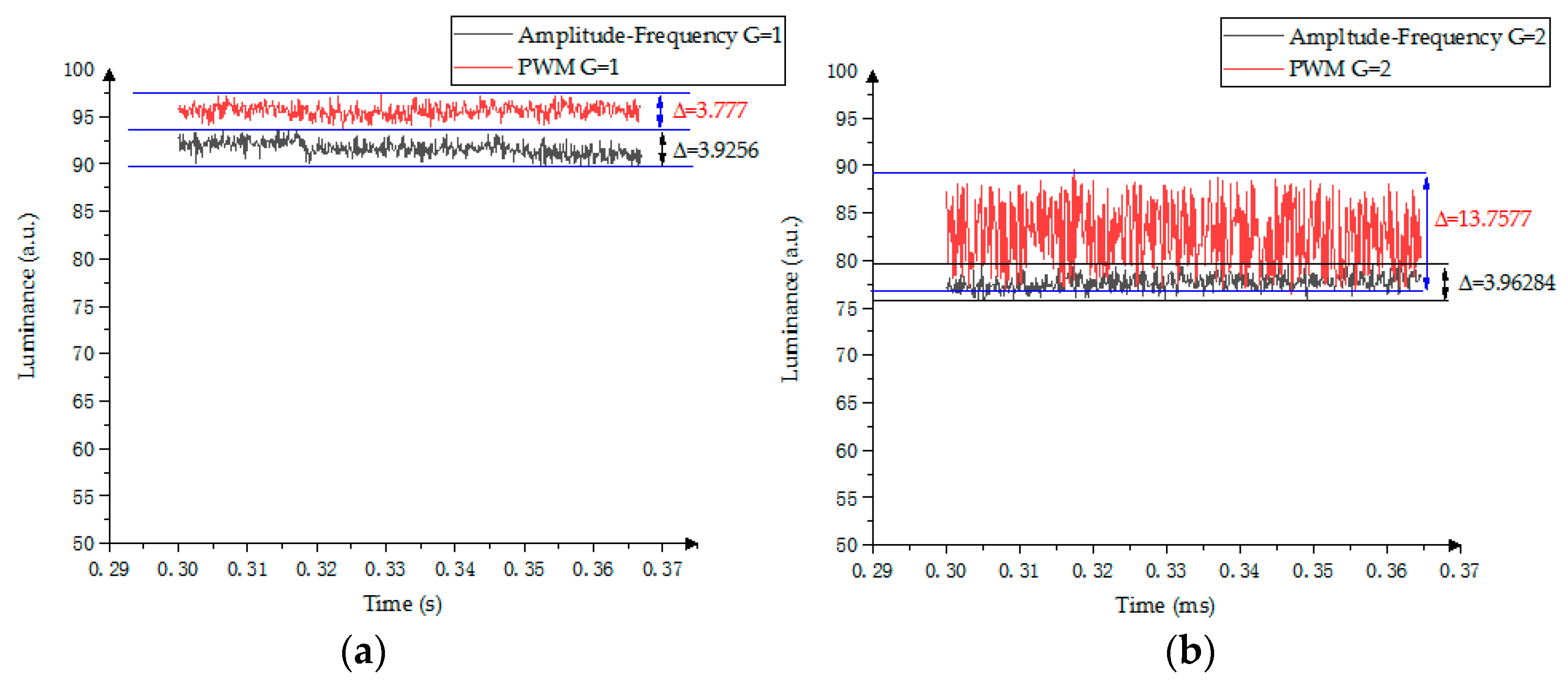
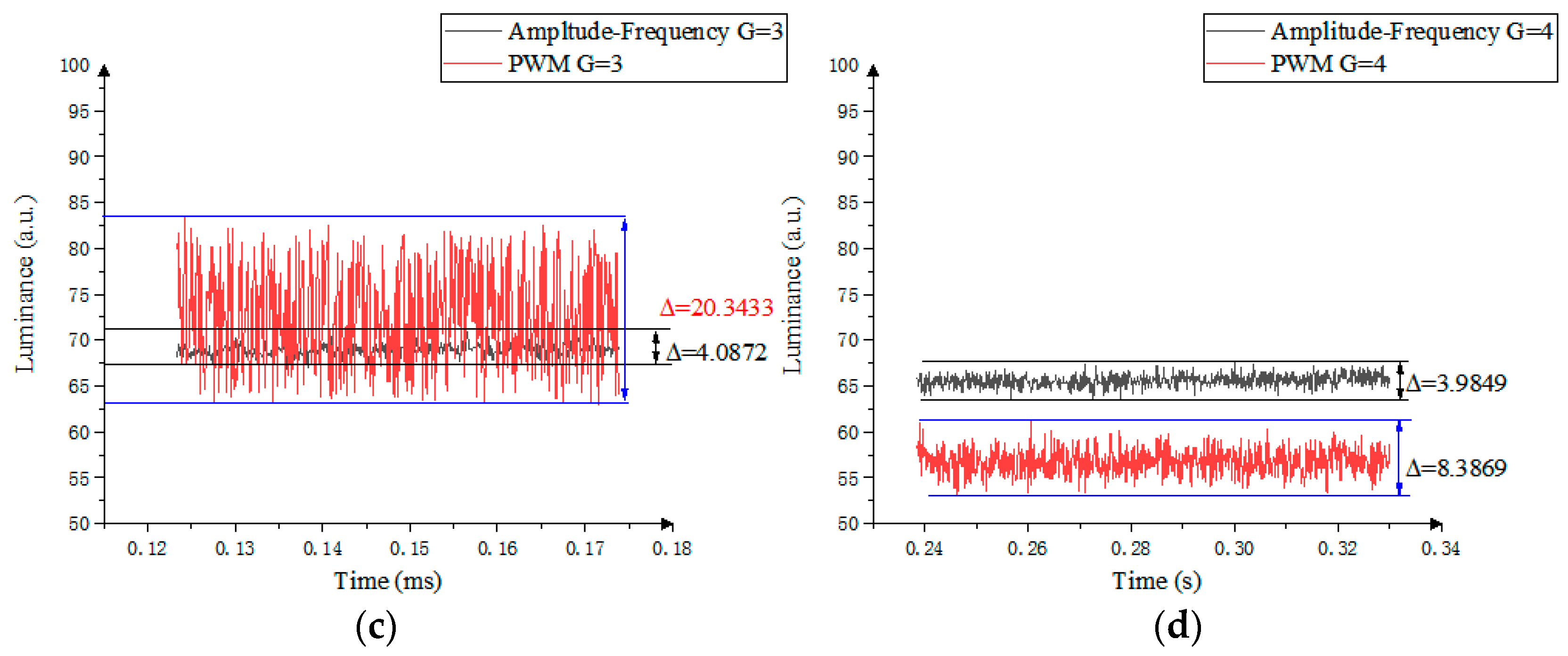
5.2. Gray-Scale Stability of the Amplitude–Frequency Mixed Modulation
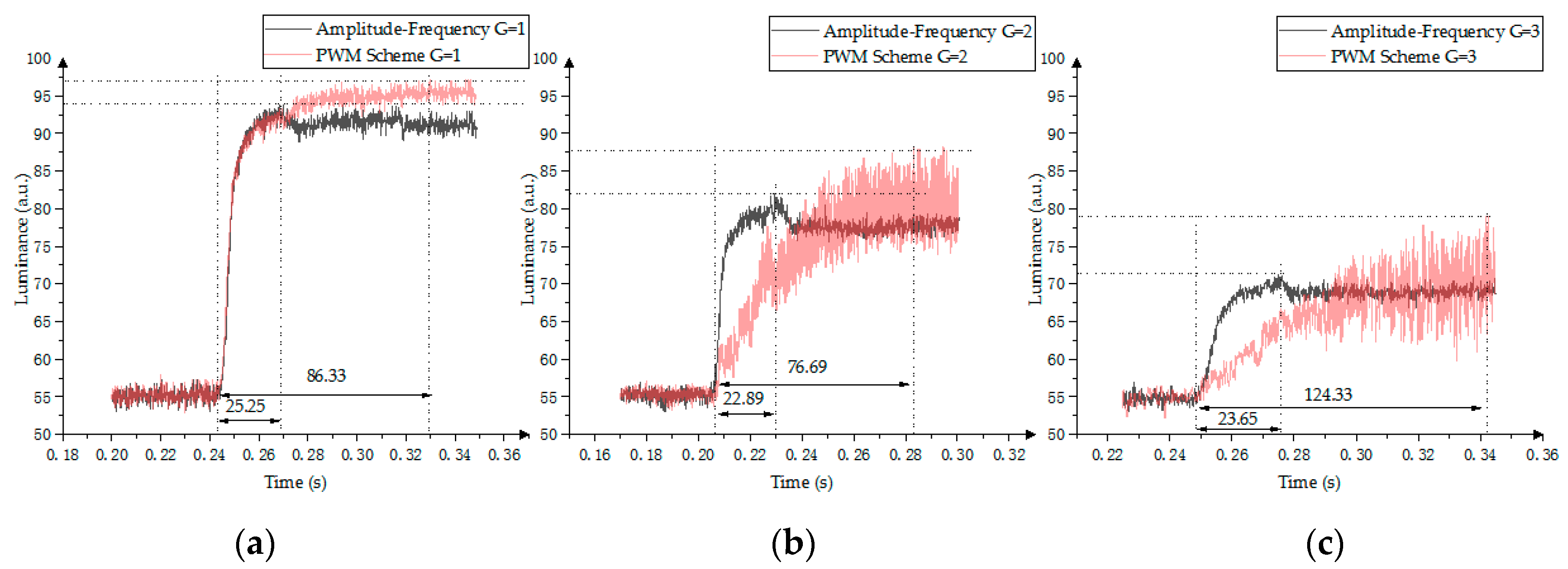
5.3. Response Time of the Amplitude–Frequency Mixed Modulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liberale, F.; Bernasconi, R.; Magagnin, L. Fundamentals and Application of Electrowetting on Dielectrics. Curr. Nanosci. 2015, 11, 286–298. [Google Scholar] [CrossRef]
- Riahi, M.; Brakke, K.A.; Alizadeh, E.; Shahroosvand, H. Fabrication and characterization of an electrowetting display based on the wetting-dewetting in a cubic structure. Opt.-Int. J. Light Electron Opt. 2016, 127, 2703–2707. [Google Scholar] [CrossRef]
- Blankenbach, K.; Schmoll, A.; Bitman, A.; Bartels, F.; Jerosch, D. Novel highly reflective and bistable electrowetting displays. J. Soc. Inf. Disp. 2008, 16, 237. [Google Scholar] [CrossRef]
- Quinn, A.; Sedev, R.; Ralston, J. Contact angle saturation in electrowetting. J. Phys. Chem. B 2005, 109, 6268–6275. [Google Scholar] [CrossRef] [PubMed]
- Hayes, R.A.; Feenstra, B.J. Video-speed electronic paper based on electrowetting. Nature 2003, 425, 383–385. [Google Scholar] [CrossRef] [PubMed]
- Feenstra, J. Video-Speed Electrowetting Display Technology. In Handbook of Visual Display Technology; Springer: Berlin, Germany, 2015; pp. 1–13. [Google Scholar]
- Kim, H.Y.; Kim, H.S.; Jang, J.N.; Woo, H.S.; Shin, C.; Shin, D.C.; Shin, Y.H. Display Substrate, Method of Manufacturing the Same and Electrowetting Display Panel Having the Display Substrate. US20110181952A1, 28 July 2011. [Google Scholar]
- Duan, M.Z.; Hayes, R.A.; Zhang, X.; Zhou, G.F. A reflective display technology based on electrofluidics. Appl. Mech. Mater. 2014, 670–671, 976–981. [Google Scholar] [CrossRef]
- Shamai, R.; Andelman, D.; Berge, B.; Hayes, R. Water, electricity, and between…On electrowetting and its applications. Soft Matter 2008, 4, 38–45. [Google Scholar] [CrossRef]
- Kumar, S.; Kumar, P.; DasGupta, S.; Chakraborty, S. Nanoparticles modulate contact angle hysteresis in electrowetting. arXiv 2019, arXiv:1901.07354. [Google Scholar]
- Gao, J.; Mendel, N.; Dey, R.; Baratian, D.; Mugele, F. Contact angle hysteresis and oil film lubrication in electrowetting with two immiscible liquids. Appl. Phys. Lett. 2018, 112, 203703. [Google Scholar] [CrossRef]
- Chiu, Y.H.; Liang, C.C.; Chen, Y.C.; Lee, W.Y.; Chen, H.Y.; Wu, S.H. Accurate-gray-level and quick-response driving methods for high-performance electrowetting displays. J. Soc. Inf. Disp. 2011, 19, 741–748. [Google Scholar] [CrossRef]
- He, T.; Jin, M.; Eijkel, J.C.T.; Zhou, G.; Shui, L. Two-phase microfluidics in electrowetting displays and its effect on optical performance. Biomicrofluidics 2016, 10, 011908. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Jing, H. Simulation of active-matrix electrophoretic display response time optimization by dual-gate a-Si: H TFT with a common gate structure. J. Disp. Technol. 2008, 4, 245–249. [Google Scholar] [CrossRef]
- Yi, Z.; Shui, L.; Wang, L.; Jin, M.; Hayes, R.A.; Zhou, G. A novel driver for active matrix electrowetting displays. Displays 2015, 37, 86–93. [Google Scholar] [CrossRef]
- Zhang, X.M.; Bai, P.F.; Hayes, R.A.; Shui, L.L.; Jin, M.L.; Tang, B.; Zhou, G.F. Novel driving methods for manipulating oil motion in electrofluidic display pixels. J. Disp. Technol. 2015, 12, 200–205. [Google Scholar] [CrossRef]
- Luo, Z.J.; Zhang, W.N.; Liu, L.W.; Xie, S.; Zhou, G. Portable multi-gray scale video playing scheme for high-performance electrowetting displays. J. Soc. Inf. Disp. 2016, 24, 345–354. [Google Scholar] [CrossRef]
- Han, J.W.; Hwang, M.C.; Kim, S.G.; You, T.H.; Ko, S.J. Vector quantizer based block truncation coding for color image compression in LCD overdrive. IEEE Trans. Consum. Electron. 2008, 54, 1839–1845. [Google Scholar] [CrossRef]
- Dou, Y.; Tang, B.; Groenewold, J.; Li, F.; Yue, Q.; Zhou, R.; Li, H.; Shui, L.; Henzen, A.; Zhou, G. Oil motion control by an extra pinning structure in electro-fluidic display. Sensors 2018, 18, 1114. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Mugele, F. How to make sticky surfaces slippery: Contact angle hysteresis in electrowetting with alternating voltage. Appl. Phys. Lett. 2008, 92, 244108. [Google Scholar] [CrossRef]
- Qiao, Y.M.; Pasandideh-Fard, M.; Chandra, S.; Mostaghimi, J. Capillary effects during droplet impact on a solid surface. Phys. Fluids 1996, 8, 650–659. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Panel Size | Resolution | Pixel Size | Pixel Wall Height | Oil Color | Driving Voltage |
|---|---|---|---|---|---|
| 8 inch | 720 × 720 | 180 μm × 180 μm | 12 μm | Cyan | 0–30 V |
| Fitting Similarity of the Function | Variance SSE (Sum of Squares for Error) | Coefficient of Determination R-square | Adjusted R-square | Standard Deviation RMSE (Root Mean Squared Error) |
|---|---|---|---|---|
| 104.2 | 0.9904 | 0.99 | 1.489 | |
| 34.47 | 0.9978 | 0.9977 | 0.7845 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, Z.; Liu, L.; Wang, L.; Li, W.; Shui, L.; Zhou, G. A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude–Frequency Mixed Modulation in TFT Electrowetting Displays. Micromachines 2019, 10, 732. https://doi.org/10.3390/mi10110732
Yi Z, Liu L, Wang L, Li W, Shui L, Zhou G. A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude–Frequency Mixed Modulation in TFT Electrowetting Displays. Micromachines. 2019; 10(11):732. https://doi.org/10.3390/mi10110732
Chicago/Turabian StyleYi, Zichuan, Linwei Liu, Li Wang, Wei Li, Lingling Shui, and Guofu Zhou. 2019. "A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude–Frequency Mixed Modulation in TFT Electrowetting Displays" Micromachines 10, no. 11: 732. https://doi.org/10.3390/mi10110732
APA StyleYi, Z., Liu, L., Wang, L., Li, W., Shui, L., & Zhou, G. (2019). A Driving System for Fast and Precise Gray-Scale Response Based on Amplitude–Frequency Mixed Modulation in TFT Electrowetting Displays. Micromachines, 10(11), 732. https://doi.org/10.3390/mi10110732