Abstract
A compact solution for the accurate and automated collection of field data in forests has long been anticipated, and tremendous efforts have been made by applying various remote sensing technologies. The employment of advanced techniques, such as the smartphone-based relascope, terrestrial and mobile photogrammetry, and laser scanning, have led to steady progress, thus steering their applications to a practical stage. However, all recent strategies require human operation for data acquisition, either to place the instrument on site (e.g., terrestrial laser scanning, TLS) or to carry the instrument by an operator (e.g., personal laser scanning, PLS), which remained laborious and expensive. In this paper, a new concept of autonomous forest field investigation is proposed, which includes data collection above and inside the forest canopy by integrating an unmanned aircraft vehicle (UAV) with autonomous driving. As a first step towards realizing this concept, the feasibility of automated tree-level field measurements from a mini-UAV laser scanning system is evaluated. A “low-cost” Velodyne Puck LITE laser scanner is applied for the test. It is revealed that, with the above canopy flight data, the detection rate was 100% for isolated and dominant trees. The accuracy of direct measurements on the diameter at breast height (DBH) from the point cloud is between 5.5 and 6.8 cm due to the system and the methodological error propagation. The estimation of DBH from point cloud metrics, on the other hand, showed an accuracy of 2.6 cm, which is comparable to the accuracies obtained with terrestrial surveys using mobile laser scanning (MLS), TLS or photogrammetric point clouds. The estimation of basal area, stem volume and biomass of individual trees could be obtained with less than 20% RMSE, which is adequate for field reference measurements at tree level. Such results indicate that the concept of UAV laser scanning-based automated tree-level field reference collection can be feasible, even though the whole topic requires further research.
Keywords:
ALS; UAV; RPAS; autonomous driving; drone; individual tree; laser scanning; forest inventory; forest 1. Introduction
The total global forest area is over 4 billion hectares, and 31% of the land surface is covered with forest. Approximately 450 million people worldwide live in forest ecosystems. Forest biomass is currently the most important source of renewable energy and accounts for approximately half of the EU’s total renewable energy consumption. Therefore, the quality and quantity of forest resources should be more constantly and accurately known by promoting the labor and cost efficiency of inventories.
Inaccurate forest inventory data result in wrong decisions by government, regional authorities, companies, and individual forest owners, and may have large negative economic impacts. Several hundreds of millions of euros per year can be lost in Finland due to erroneous silvicultural decisions. The estimation of growing stock has to be based on a combination of sampling, measuring, and modeling, therefore, the reliability of field measurements in forest plots is essential for an accurate forest inventory, regardless of the level of the inventory, i.e., national or strategic.
The efficient and accurate collection of field reference data is fundamental for modern inventories, which consist of the integration of 3D remote sensing processes. The utilization of progressive 3D remote sensing techniques requires carefully selected tree- and/or plot- level field references for data calibration [1], which are usually manually collected with instruments, such as calipers, measuring tapes, hypsometers, and sometimes relascopes, cruising rods, and increment borers. The most common tree-level parameters are the diameter at breast height (DBH), possibly the diameter at a height of 6 m (d6), and the tree height (h). The estimates of volume (VOL) and above ground biomass (AGB) of individual trees are then based on these basic measurements. Plot-level information can be obtained directly by plot level estimates produced by, e.g., the relascope, or the summing up of tree-level characteristics. Such conventional approaches can hardly keep pace with the coverage, scale, and repetition of field reference data collection required by contemporary and future forest inventories.
More automated cost-effective techniques are needed to provide field reference data as accurately and rapidly as possible. After approximately twenty years of studies, terrestrial laser scanning (TLS) is coming to a stage of practical applications [2]. Performances of both single-scan and multi-scan approaches had been thoroughly investigated, and it was reported that 10–32% of trees in a sample plot are invisible from a single-scan data due to the effects of occlusion. The multi-scan approach is capable of covering close to 100% of the trees in a plot, but is hindered by the labor and post-processing costs. Nevertheless, TLS has been shown to be feasible for collecting basic tree and plot attributes, such as tree position, DBH, stem curve, tree species, volume, and biomass [2]. The accuracy of automatically extracted attributes is equivalent to those based on the key field measurements (DBH, d6, and h) combined with the best allometric models [3].
Other efforts to further improve the efficiency and the automatic level of field reference data collection include e.g., mobile laser scanning (MLS), photogrammetric terrestrial point clouds (a.k.a., SfM) and the use of crowdsourcing. MLS has the capacity to measure complex and problematic forest areas in high detail and more easily. Recent reports shown that MLS allows the collection of plots 10 times faster than TLS with approximately 2–4 cm DBH accuracy [4,5]. Similar to the TLS, MLS has the potential to provide the stem curve, but the result has not yet been demonstrated. A downside of MLS is that, due to GNSS shadows in forests [6], the registration accuracy of MLS needs to improve, e.g., by simultaneous localization and mapping (SLAM). As an alternative to laser scanning, photogrammetric terrestrial point clouds also provide 2–4 cm accuracy for DBH, but the quality of the data is lower compared to TLS/MLS [7]. The use of GNSS data in a crowdsourcing context has limited accuracy for field reference [8], therefore, smartphones that have either a camera or a range measuring system are more feasible for crowdsourcing-type data collection, which is especially suitable for forest owners in their own forests. Studies on all these technologies are ongoing, and best practices continue to arise.
Summarizing the state of the art of automated field reference collection, TLS provides accuracy in field inventories by providing tree volumes and biomass at the level of 10% error, which is optimal for updating forest models and permanent sample plots in national forest inventories. MLS delivers an improved efficiency of data collection, with reduced accuracy compared to TLS. The SfM, on the other hand, provides an accuracy close to TLS in the best cases and has limited efficiency for both data collection and processing. A common disadvantage is that all these technologies rely on qualified operators for reliable data acquisition. The quality of the collected data relates to the skills and the experiences of the on-site operator, which reduces the stability, as well as the labor and cost efficiency brought by the new technologies. Meanwhile, the market value of field inventories is more than 1 billion euros annually, indicating a great demand for further advancements in operations.
To further increase the automation level of data acquisition, an unmanned aerial vehicle (UAV) is an ideal operational platform with which to start. There has been a large number of UAV imaging-based attempts for forestry (e.g., [9]), but in practice, laser scanning is required if the elevation model and lower canopy layers also need to be measured. Jaakkola et al. [10] evaluated the accuracy and feasibility of a mini-UAV-based laser scanning system for tree measurements. The standard deviation of individual tree heights was approx. 30 cm. The change in biomass of a coniferous tree can be detected with an R2 value of 0.92 from a multi-temporal UAV laser point cloud. Wallace et al. [11] continued the work with a similar system and concluded that the standard deviation of tree height can be reduced to 0.26 m when using a density of eight points per square meter and to 0.15 m when a higher point density was applied. Tree locations and crown width accuracy have been reported in the same study to be 0.5 m and 0.6 m, respectively. In [12], the application of UAV laser scanning data resulted in 98% of trees being repeatedly and correctly delineated, and trees were measured with a location accuracy of 0.48 m and a crown area accuracy of 3.3 m2. Chisholm et al. [13] flew along forest roads with a UAV laser scanner and measured trees along the road, which managed to detect 73% of trees with DBHs higher than 20 cm within 3 m of the flight path. The DBH estimates of the detected trees were measured with an RMSE % of 25.1%, which is approximately 10 cm. All these works demonstrate the potential of the UAV as a platform for field data collection in forests.
The main objective of this paper is to introduce a new concept of autonomous forest field reference collection, which includes a higher level of automated data acquisition above and inside the forest canopy by integrating an UAV and autonomous driving, and in combination with fully automated data processing. As a first step towards realizing this concept, the feasibility of UAV laser scanning for measuring the DBH, basal area, stem volume, and biomass at an individual tree level is evaluated. The critical point of this experiment lies in the extraction of DBH or stem curve from above-canopy UAV laser scanning data, which is only possible when the tree trunks are properly recorded in the point cloud. A concrete description of the new concept is given in Section 2. Section 3 and Section 4 introduce the data, the methods and the results of the pioneering study on UAV-based laser scanning. The status quo, the challenges, and the outlooks are discussed in Section 5. All findings are summarized in the conclusion, i.e., the last section of the paper.
2. Autonomous Field Reference Collection in Forest
The concept of autonomous field reference collection in forests consists of two main aspects, i.e., inside and above-canopy surveys utilizing a UAV platform. Recent examples of remote sensing UAV systems are operated by a field operator, but the ultimate objective is to integrate it with an autonomous vehicle; thus, the intervention from operator can be downgraded and the efficiency can be further promoted.
When flying under the canopy, the major task is to reconstruct the tree trunks and branches based on consecutive scans, which can be achieved by satisfying the conditions that the FOV is close to 360°, that the scanner is oriented slightly tilted to the nadir, that precise positioning inside the canopy is allowed by geodetic-SLAM and that collisions can be avoided.
A close to 360° FOV allows the scanner to record the trees from top to bottom while flying inside the canopy. The scanner needs to be tilted on the platform to provide scanning profiles that are non-vertical to the ground surface, which guarantees accurate recording of the verticallystanding tree trunks. Due to the GNSS (Global Navigations Satellite System) signal shadows under forest canopies, geodetic SLAM is required to support precision positioning inside the canopy. The term geodetic SLAM is used instead of SLAM, indicating that instead of real-time positioning, data can be post-processed to optimize the positioning quality. Qualified sensors and platforms for such tasks can be costly. An example of a commercial system is the Riegl VUX-1 (RIEGL, Horn, Lower Austria, Austria) scanner with up to 330° FOV carried by a Riegl RiCOPTER (RIEGL, Horn, Lower Austria, Austria). Without proper collision avoidance, it is impractical for such an expensive system to be applied to inside-canopy measurements.
While flying above the canopy, the operation setting is close to ordinary airborne laser scanning (ALS). The geo-referencing solution provided by GNSS and an inertia measurement unit (IMU) is within 2–5 cm of absolute accuracy since distances to objects for the UAV cases are typically small. Two different approaches can be utilized to achieve stem characteristics: (1) the estimation of stem properties utilizing mathematical or regression models based on the tree height and crown dimensions derived from the UAV point cloud; and (2) direct measurements of DBH or stem curve from the UAV point cloud, which require a specific laser scanner that allows a very narrow beam.
Measurements from inside and above the canopies can be merged at the object and/or point level. Object level fusion allows, e.g., the integration of the height and the 3D crown measured from the above-canopy flight with the stem curve measured with the inside-canopy flight at individual tree level, e.g., [11]. Point-level integration allows the merging of the point clouds from the two flights with the precondition that both flights are precisely georeferenced. Meanwhile, measurements from above the canopy can also be used to further improve the geo-referencing of the inside-canopy measurements.
In 2004, autonomous cars competing in the DARPA Grand Challenge and 2007 Urban Challenge navigated themselves independently in empty countryside/rural and urban environments, respectively [14]. Since then, all major car manufacturers, newcomers in car business, and a large number of universities have developed prototypes for autonomous vehicles. The fundamental autonomous technologies are converging. Autonomous cars can position themselves and detect surroundings using a variety of sensor technologies, such as laser scanning, camera, sonar and radar. Advanced automation processing methods interpret multi-sensor information to create environmental and situational awareness and to carry out multiple tasks, such as planning appropriate navigation paths, recognizing obstacles, and identifying relevant signage.
The integration of UAV platforms and autonomous driving systems is the ultimate vision for autonomous collection of forest field data. Mercedes-Benz has unveiled plans for a future delivery van that features fully automated cargo loading and delivery with drones. In a similar way, future forest investigations can be accomplished by a combination of self-driving cars and UAV equipped with laser scanners. Several UAV can be used for above- and inside-canopy flights at same area, alternatively, they can fly to different sample plots in a neighborhood. When the UAV/UAVs are hosted by the autonomous cars, from where the drones are hosted, and receive a sustainable power supply, a lasting (e.g., more than 10 h per day) independent operation in various locations and different canopy layers can be implemented, with no in situ presence of a human operator. As such, it is expected that several hundreds of field plots can be recorded in a day.
It will take 15–20 years for this concept to become practice. However, it is expected that by 2030 15% of all new cars globally will be based on self-driving techniques [15]; thus, the concept can be demonstrated in a short period. Therefore, this kind of dual robotic vision has a chance of becoming realized. The concept is a common solution for all surveying measurements that are likely to be handled from UAVs.
3. Study Area and Materials
As a first step towards the autonomous field reference collection in forest, the feasibility of deriving stem characteristics (DBH, VOL, AGB, and height) from an above-canopy UAV flight is assessed. To achieve a comprehensive understanding on the performances, both approaches, i.e., the direct automated measurement from point cloud, and the estimation utilizing regressing models based on the tree height and crown dimensions, are applied to the laser scanning point cloud collected by a light mini-UAV laser scanning system. This section provides detailed information about the test area, the applied UAV laser scanning system and the collected data. More information about the methods and results is given in next two sections.
3.1. Test Site
The 5 km × 5 km study area, located in Evo, Southern Finland (61.19°N, 25.11°E), belongs to the southern boreal forest zone. It contains approximately 2000 ha of managed boreal forest, having an average stand size of slightly less than 1 ha. The area comprises a broad mixture of forest stands, varying from natural to intensively managed forests. The elevation of the area varies from 125 m to 185 m above sea level. Scots pine (Pinus sylvestris) and Norway spruce (Picea abies) are the dominant tree species in the study area and contribute 40% and 35% of the total volume, respectively, whereas the share of deciduous trees (mainly birches, Betula sp.) is 24% of the total volume. In the test site, a 64 m × 64 m area was selected for the study and surveyed by UAV measurements.
3.2. Field Measurements
Field measurements were undertaken in the summer of 2014 and consisted of individual tree measurements for 201 trees in the study area. All trees that had a diameter at breast height (DBH) exceeding 5 cm were tallied with steel calipers from two directions perpendicular to each other and the mean was taken as the value for DBH. Tree height was measured using an electronic hypsometer for all the trees as well. Height measurement accuracy is expected to be approximately 0.5 m. The tree species was also recorded. Tree volume and above ground biomass were calculated using standard Finnish models [16,17] with tree species, DBH, and height as inputs. The descriptive statistics of reference trees are summarized in Table 1. Some trees had fallen during the time window between the field measurements (2014 summer) and the UAV flights (2016 spring). Information about the fallen trees were updated to the reference database based on additional checking so that the final result would not be influenced. The growth between acquisitions corresponds to one year growth and was neglected.

Table 1.
The descriptive statistics of reference trees; height (H), DBH (DBH), stem volume (VOL), and aboveground biomass (AGB).
3.3. The UAV Laser Scanning System and the Collected Point Cloud
The UAV laser scanning system was based on a Tarot T960 hexacopter (TAROT-RC, Wenzhou, Zhejiang, China), Velodyne Puck LITE (Velodyne, San Jose, CA, USA) laser scanner, a Novatel IGM-S1 GNSS/IMU (Novatel, Calgary, AB, Canada) positioning system and a Raspberry Pi 2 (Raspberry, Cambridge, East of England, UK) single board computer for data logging. Specifications of the laser scanner and the positioning system can be found in Table 2 and the complete system is shown in Figure 1. The flying altitude was approximately 40 m above ground level, the flying speed was approximately 7 m/s, and the time taken to measure the target area was approximately 4 min. There was a total of 10 flight lines over the 80 m wide target area, which resulted in a flight line spacing of approximately 9 m. Based on a ±30° scanning angle, the average point density was about 800 points/m2. Since the system was assembled for the measurement flight, a boresight calibration was performed for the system. A sample of the collected point cloud is shown in Figure 2.
Table 2.
Specifications of the system components.

Figure 1.
The applied UAV laser scanning system.
Figure 2.
Example scenes of the collected point cloud, colored by elevation; (left) bird view; (right) isometric view.
4. Methods
4.1. Preprocessing of UAV Laser Scanning Data
The UAV point cloud was first processed to remove noisy points, and the ground and non-ground points were classified using the standard approach of the TerraScan based on the progressive triangulated irregular network (TIN) densification method by Axelson [18]. A DTM was then created using the classified ground points. The above ground heights (i.e., normalized heights) were calculated for each laser point by subtracting the corresponding ground elevation from the original laser height.
4.2. Individual Tree Detection and Classification of Stem and Crown Points
Individual tree detection was based on a canopy height model (CHM) which was created by taking the maximum value of normalized laser points within a grid cell 0.2 m of size. The detection method has two major steps: first, the treetops were found by a local maximum filtering algorithm; second, the tree crowns were delineated using a watershed algorithm. In the first step, the CHM was smoothed by Gaussian filtering, and then local maxima were detected from the filtered CHM. These local maxima were considered to be treetops and used as seeds in the following step, where crowns were delineated by a marker-controlled watershed algorithm with a background mask of a 2 m height threshold. The individual tree detection approach produced tree crown outlines, from which the crown shape and the location of the detected trees could be determined. The (x, y) location of the highest point within a tree crown segment (i.e., the treetop) was taken as the location of a detected tree. The laser points of each detected tree were extracted by selecting the points within each crown segment.
The points of each tree were further classified into crown and stem points. Starting from 0.5 m above ground, a series of bounding boxes were calculated for the points of an individual tree with 0.5 m height interval. The separation between stem and crown points was then based on the horizontal sizes of the bounding boxes, because the stem has a much smaller bounding area than the crown. Consequently, the lowest height where the bounding area significantly changes was defined as the low branch height. All the tree points below that height were classified as stem points and the rest were considered to be crown points.
4.3. Estimation of Tree Parameters Based on Random Forest Regression
Crown features (CF) were calculated from classified crown points, including crown height, tree height, crown surface area, crown area projection on ground, crown volume, crown diameter, crown perimeter, and percentiles (10% to 90% with increment of 10%) of crown points. Detailed explanations are given in Table 3.
Table 3.
Definition and explanation of derived crown features.
The tree attributes were estimated using random forest (RF) regression to find a prediction model based on CF. RF is a technique that consists of an ensemble of decision trees using means for the final prediction. In this study, tree attributes, i.e., tree height (H), DBH, basal area (BA), volume (V) and above ground biomass (AGB) were estimated based on the prediction models developed using the crown features as predictors and the field-measured tree attributes as a response for correctly detected trees using RF. One of the merits of RF is that the algorithm provides a measure for the assessment of feature importance. Feature importance measures produced by the RF algorithm provided an insight into which object features were relatively more important for the tree attribute estimations.
4.4. Estimation of Tree Parameters Based on Direct Measurement from Points
Two automated approaches directly measured the DBH or stem curve from the tree points. A principal component analysis (PCA)-based algorithm provided the DBH measurement by transforming all stem points of an individual tree into a new space composed by three orthogonal components. The maximum values of the second and the third component scores were used to estimate two orthogonal diameters of the stem, and the mean of these two values was taken as the DBH of the tree. As an alternative to the PCA method, a circle fitting method was also applied, which could derive the stem curve, i.e., the diameter of a stem at different tree heights. The stem points were divided into different layers along the stem direction. Stem points in each layer were used for estimating the diameter by least-squares circle fitting. The diameter of the circle was taken as the stem diameter at the mean height of the layer. The user needs to define the interval of the layers. In this study, we defined the layers at the height 0.8, 1.3, 2, 3, 4, etc., to demonstrate the possibility of deriving the stem curve from the above-canopy UAV laser scanned data.
4.5. The Evaluation Methods
To evaluate the performance of the various methods, we compared the extracted tree attribute values with the reference values and calculated the bias, as well as the root mean square errors (RMSE) as measures to estimate the error and the correlation coefficient (R) as a measure for the goodness of fit of the prediction. The relative bias (bias %) and relative RMSE (RMSE %) were obtained according to the sampled mean of each attribute in question.
To evaluate the importance of different features, we estimated the tree attributes based on different combinations of features as follows: (1) all CF as predictors; (2) first 7 geometric CF; and (3) 9 percentiles of CF (see Table 4).
Table 4.
Accuracy of tree attribute estimation based on different combinations of crown features (CF) using random forest (RF) regression.
To avoid optimized accuracy, a ten-fold cross-validation strategy was applied in all evaluations.
5. Results
5.1. Accuracy of Individual Tree Detection
Out of 171 reference trees, 144 trees were successfully linked with field trees (84.2% detection rate). However, the detection rate was 100% for isolated and dominant trees. An example of individual tree detection is shown in Figure 3.
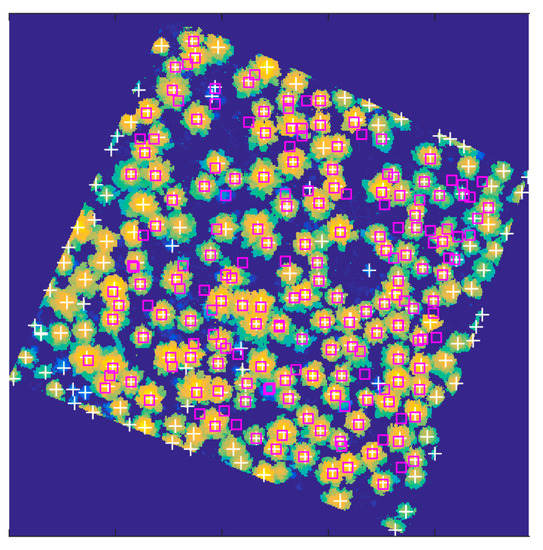
Figure 3.
Result of individual tree detection (‘+’ in white: detected trees; □: field-measured trees).
5.2. Accuracy of Tree Attribute Predictions with Different Approaches
The evaluation results of the tree attribute estimations were presented in two different tables, whereas the RF regression-based estimation results are given in Table 4, and the direct measurement-based results are given in Table 5.
Table 5.
Accuracy of tree attribute estimation based on direct measurements from the point cloud.
Since the point clouds of crowns were very dense, it was possible to estimate the diameter, basal area, volume, and biomass of each tree based on point cloud metrics related to geometry and percentiles. The DBH was estimated with an accuracy of 2.55 cm (10.4%). Basal area, stem volume, and biomass were all estimated with better than 20% error.
The results also indicated that, based on the UAV laser scanning point cloud, when utilizing direct measurement in the point cloud, it is possible to achieve 1.28 m accuracy for tree height and 6.8 cm and 5.5 cm accuracy for DBH with PCA and circlefitting-based algorithms, respectively.
6. Discussion
To understand the journey ahead of researchers towards the ultimate destination, which is autonomous field investigations in forests, visions must be clarified between the expectations and the reality. A precondition for the automated collection of field references being accepted and applied is that the accuracy of the provided information reaches the existing standards. Taking Finland as an example, the acceptable accuracy level for DBH measurement is 0–2 cm, and 0.5 m for tree height [2]. Compared with the preliminary results reported in this experiment, it is clear that to reach the final target of autonomous field reference collection, demanding efforts are required to further upgrade the platforms, the sensors, and the automated data processing methods.
6.1. Source of Errors
Results in this experiment show that the direct measurement of DBH and tree height from the above-canopy UAV laser point cloud was much less accurate than the predicted result based on selected crown features and random forest regression. The reasons for this inaccuracy can be discussed from the perspectives of the system, and the automated processing methods.
The applied system in this experiment consists of a Velodyne Puck LITE as scanner and a NovAtel IGM-S1 (SPAN-IGM-S1) as a georeferencing unit, which is a light to be carried with a mini-UAV platform. The random error of the point clouds is at roughly 3 cm level, which is inherited from the range accuracy of the scanner. The 3 mrad beam divergence is approximately ten times higher than that of typical ALS laser sensors, which produce a 9–15 cm footprint from a 30–50 m distance. Such a large footprint creates random errors to the positioning of the laser returns depending on the reflectance of the stems and the incidence angle. In addition, the drift of SPAN-IGM-SI causes variations in the data by many ways, which reduces the geo-referencing precision of the point cloud. Considering the propagation of those system errors to the point cloud, the accuracy of direct stem diameter measurement can be expected to be above the 2 cm RMSE level with current system settings. For a more accurate point cloud, a better scanner that has a smaller ranging error and especially smaller divergence is needed.
The PCA and circlefitting methods for automated stem dimeter measurements from the point cloud are intuitive and fundamental choices for such tasks. The PCA-based method gives an average diameter of the whole stem rather than the DBH, and there is plenty of room to further improve the circlefitting-based methods. However, the main objective of this experiment is to demonstrate the feasibility of direct stem measurements from above-canopy UAV point cloud, and there are different options for mathematical development. Therefore, it can be expected that the accuracy of direct DBH measurement is improved with other advancements in the methods.
There were 2 years between field and UAV measurements. Fallen trees were excluded from the field references; therefore, the only omitted factor in the analysis is forest growth. The average height growth of the stand is approximately 10 cm per year, and the corresponding diameter growth is 4 mm per year, which might have slightly exaggerated the inaccuracy of the direct measurements from the point cloud; however, due to the nature of the random forest regression, such biases were directly removed during the regression process. Thus, the field reference error was negligible at this stage from the conclusion point of view.
6.2. Outlook
With the current settings of sensors, as well as the processing algorithms, the results suggest that the regression-based estimation of stem diameter and tree height is more accurate than the direct measurements from the above-canopy UAV laser point cloud. Therefore, individual tree detection techniques should be developed. A more accurate crown determination leads to a more accurate regression of tree attributes. In a next step, direct stem curve and diameter measurements can be improved by integrating data from inside-canopy-flying UAVs.
Obviously, there is a great need to compare the accuracies herein with those obtained by MLS, TLS and terrestrial photogrammetric techniques. Is MLS or TLS alone accurate enough, or is there a role for the UAV measurements? One thing for certain is that TLS is less capable of measuring tree heights and, therefore, alternative techniques that provide height are needed. Further studies are required to discover different possibilities.
Further development for individual tree detection is also necessary for the calibration of today’s ALS data, for which a great amount of plot-level field reference is needed. Even though 100% of the stems from the dominate tree story can be obtained, more advanced techniques are needed in order to obtain accurate plot-level estimates in multi-layered complex forests. Again, the problem can be solved using inside-canopy-flying UAVs, MLS, TLS, and terrestrial photogrammetric point clouds. There is also great potential for algorithmic improvements. New tree detection algorithms are still expected to be developed. Algorithms using trunk hits (e.g., using RANSAC) and simultaneously growing from trunk hits to the crown, and vice versa, could improve the accuracies of state-of-the art individual tree detection [19,20]. Thus, both top-down and bottom-up connectivity of laser points can be used.
Even though the direct measurements of DBH in this study appeared to be less satisfactory, further research on that topic should be carried out. By selectively taking goodquality arcs collected by the laser scanner, and by using estimates for stem curve, a higher quality output could be obtained.
7. Conclusions
In this study, we proposed the concept for autonomous forest field reference collection, mainly suitable for the boreal forest zone. The major advance of the new concept is to introduce the above- and inside-canopy laser scanning survey based on a UAV platform, so that compact information of tree trunks and crowns can be acquired. With the integration of the UAV platform with autonomous driving as an ultimate target, the investment of human labor and the impact of human intervention can be reduced to a minimum.
Meanwhile, as a first step in realizing the concept, we could demonstrate that using a UAVbased Puck LITE laser scanner, both the direct measurement and estimation of DBH at the tree level are possible from above-canopy flight. The direct measurement of DBH ranged from 5.5 to 6.8 cm due to the range and orientation errors, the high divergence of the laser beam and the applied processing algorithm. The estimation of DBH from point cloud metrics utilizing random forest regression, on the other hand, presented an accuracy of 2.6 cm, which is comparable to accuracies obtained with terrestrial surveys using MLS or photogrammetric point clouds.
Therefore, the concept of utilizing UAV-based laser scanning for forest field reference data collection at the tree level seems to be feasible, even though the topic area requires further research. The estimation of basal area, stem volume and biomass of individual trees could be obtained with less than 20% RMSE, which is adequate for field reference measurements at the tree level. Since many subordinate trees were missed by the above-canopy UAV flight, it is recommended that inside-canopy UAV laser scanning to be used, especially for detecting all trees, which is necessary when calibrating other large scale airborne data with the plot-level field reference data. The combination of TLS, MLS or conventional field work with UAV laser scanning is also a recommended research topic in order to improve plot-level field reference collection.
As an ultimate vision for autonomous collection of forest field data, the integration of UAV platforms and autonomous driving systems is an orientation worth exploring. FGI is currently developing technologies to demonstrate such robotic systems in near future for several mapping applications.
Acknowledgments
The research leading to these results has received funding from the Academy of Finland projects “Interaction of Lidar/Radar Beams with Forests Using Mini-UAV and Mobile Forest Tomography” (No. 259348), and “Centre of Excellence in Laser Scanning Research (CoE-LaSR)”, laserscanning.fi (No. 307362).
Author Contributions
A.J. constructed the UAV laser scanner, J.H. planned the concept and experiment. X.Y. processed the data. A.J., J.H., Y.W., X.L. and X.Y. wrote the article. H.K. contributed material collection. All co-authors assisted in writing and improving the manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yu, X.; Hyyppä, J.; Karjalainen, M.; Nurminen, K.; Karila, K.; Vastaranta, M.; Kankare, V.; Kaartinen, H.; Holopainen, M.; Honkavaara, E.; et al. Comparison of Laser and Stereo Optical, SAR and InSAR Point Clouds from Air- and Space-Borne Sources in the Retrieval of Forest Inventory Attributes. Remote Sens. 2015, 7, 15933–15954. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppa, J.; Holopainen, M. Automated Stem Curve Measurement Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppa, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The Use of a Mobile Laser Scanning System for Mapping Large Forest Plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Wang, Y. Possibilities of a Personal Laser Scanning System for Forest Mapping and Ecosystem Services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef] [PubMed]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppa, J.; Honkavaara, E.; Liu, J. Forest Data Collection Using Terrestrial Image-Based Point Clouds From a Handheld Camera Compared to Terrestrial and Personal Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Liu, J.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Liang, X.; Kaartinen, H.; Kukko, A.; Zhu, L.; Wang, Y.; Hyyppä, H. Can global navigation satellite system signals reveal the ecological attributes of forests? Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 74–79. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; Tommaselli, A. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An Assessment of the Repeatability of Automatic Forest Inventory Metrics Derived From UAV-Borne Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Chisholm, R.A.; Cui, J.; Lum, S.K.Y.; Chen, B.M. UAV LiDAR for below-canopy forest surveys. J. Unmanned Veh. Syst. 2013, 1, 61–68. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Siu, J. Self-Driving Cars to Make Up 15% of Global Sales by 2030: Study. 2016. Available online: http://www.autoguide.com/auto-news/2016/01/self-driving-cars-to-make-up-15-of-global-sales-by-2030-study.html (accessed on 28 July 2017).
- Laasasenaho, J. Taper Curve and Volume Functions for Pine, Spruce and Birch (Pinus Sylvestris, Picea Abies, Betula Pendula, Betula Pubescens); Finnish Forest Research Institute: Helsinki, Finland, 1982. [Google Scholar]
- Repola, J. Biomass equations for Scots pine and Norway spruce in Finland. Silva Fenn. 2009, 43, 625–647. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 111–118. [Google Scholar]
- Wang, Y.; Hyyppa, J.; Liang, X.; Kaartinen, H.; Yu, X.; Lindberg, E.; Holmgren, J.; Qin, Y.; Mallet, C.; Ferraz, A.; et al. International Benchmarking of the Individual Tree Detection Methods for Modeling 3-D Canopy Structure for Silviculture and Forest Ecology Using Airborne Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5011–5027. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).