An Advanced Rotation Invariant Descriptor for SAR Image Registration




Abstract
:
1. Introduction
2. Methodology
2.1. Local Descriptors for SAR Image Registration
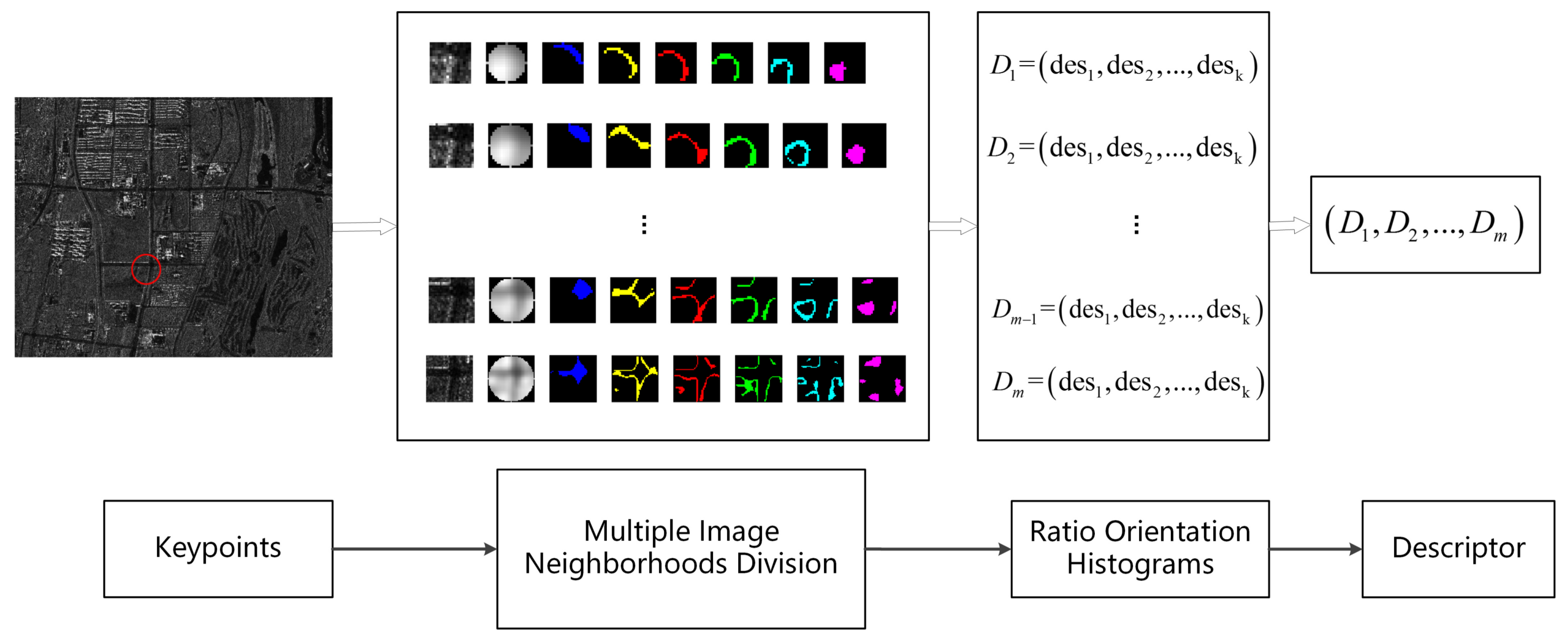
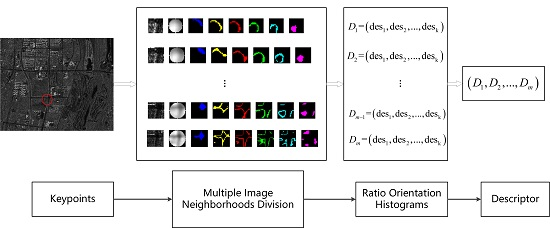
2.2. The Proposed Rotation-Invariant Descriptor
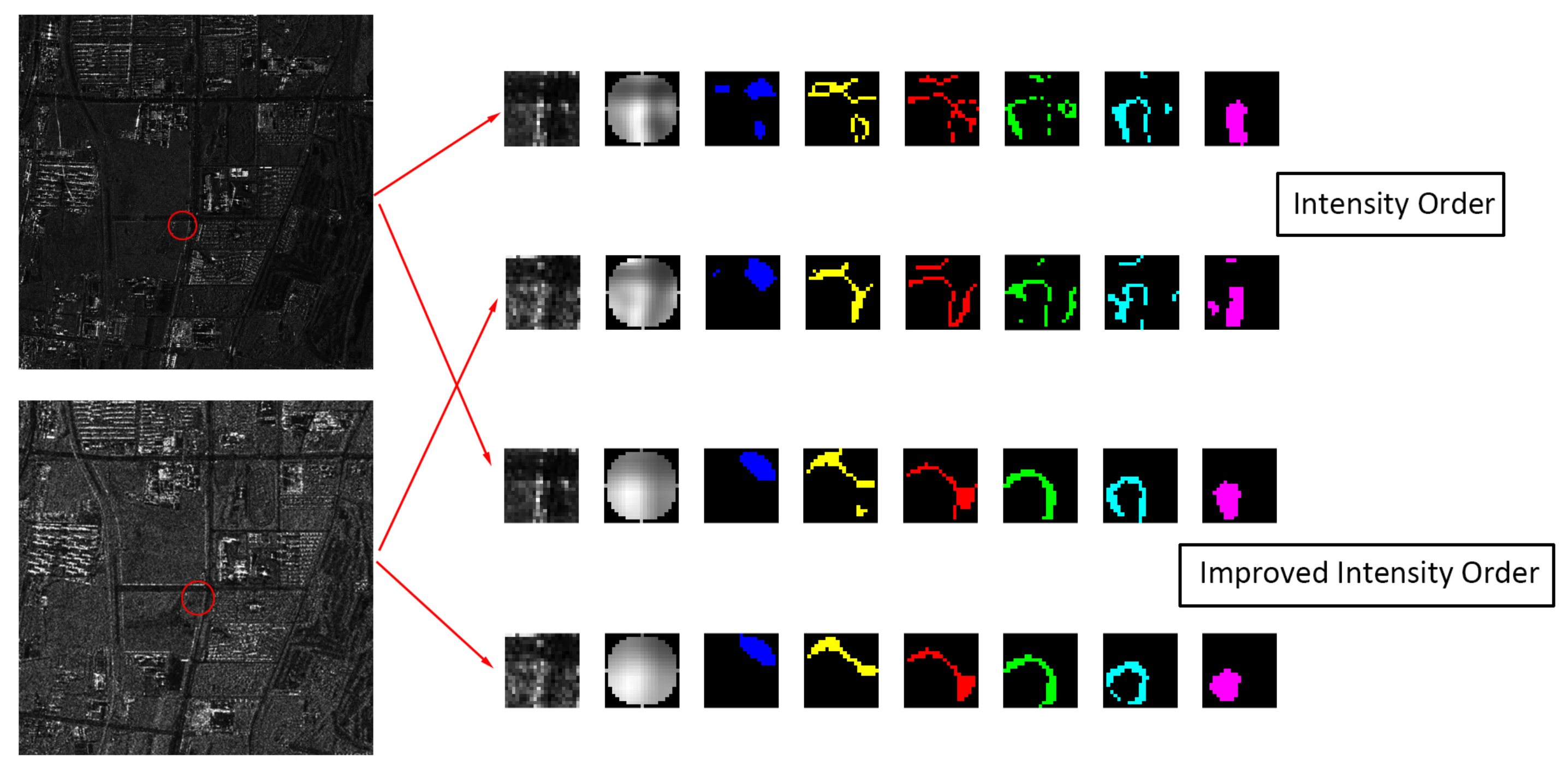
2.2.1. Neighborhood Division Based on Improved Intensity Order
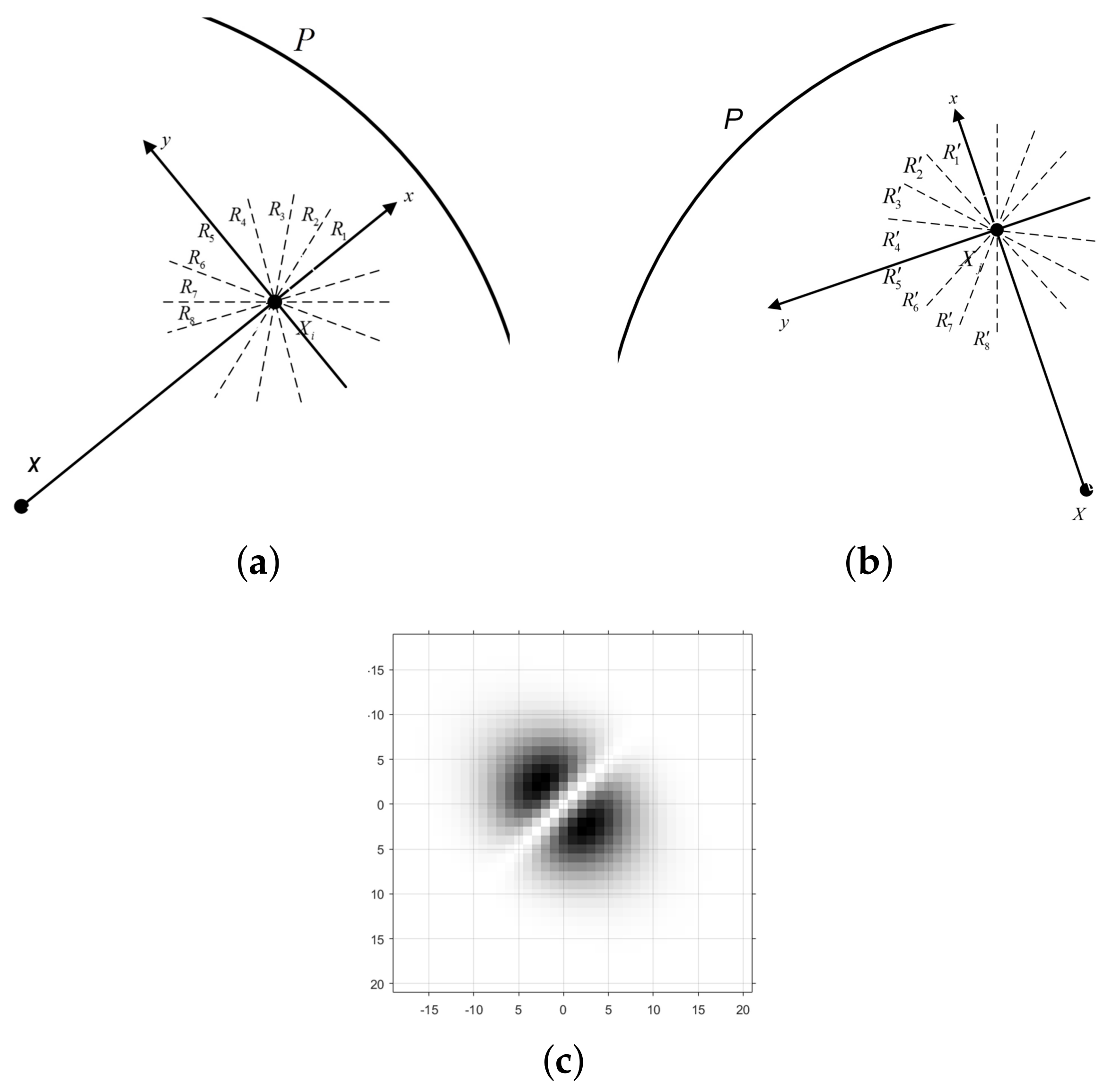
2.2.2. Rotation-Invariant Ratio Orientation Histogram
3. Experimental Results and Discussion
3.1. Parameter Settings and Datasets
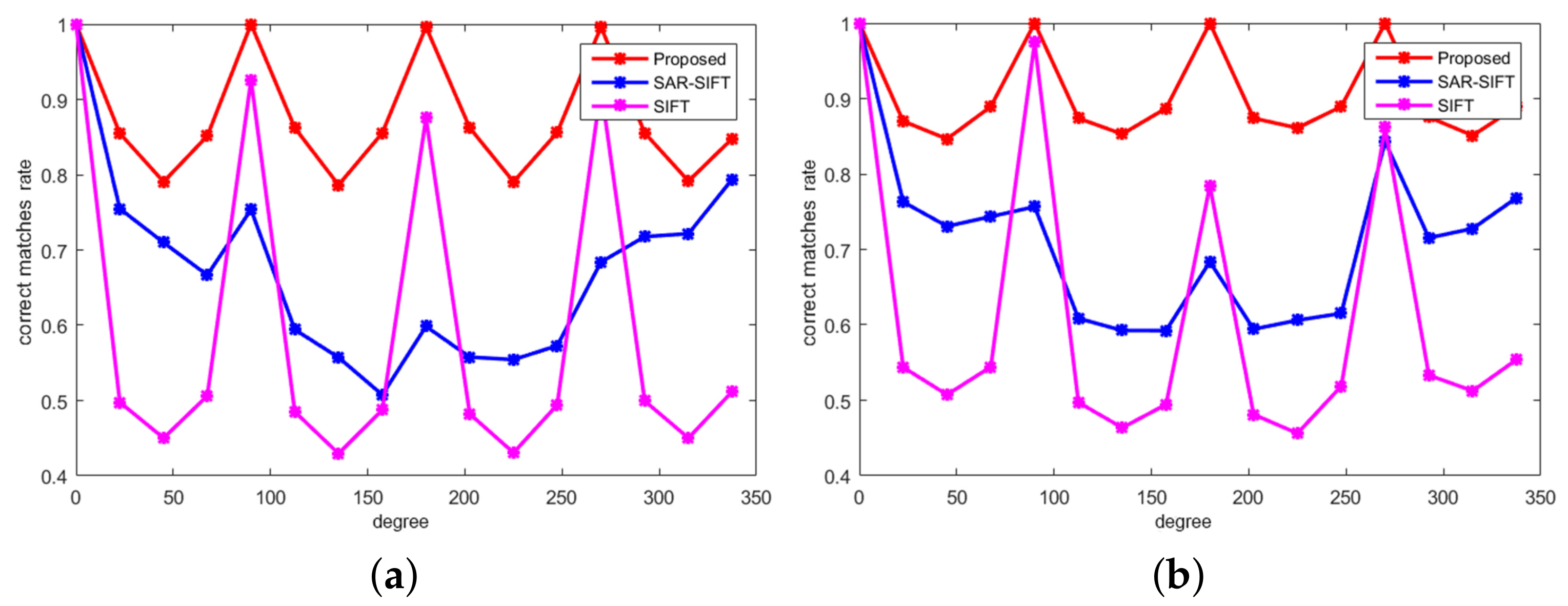
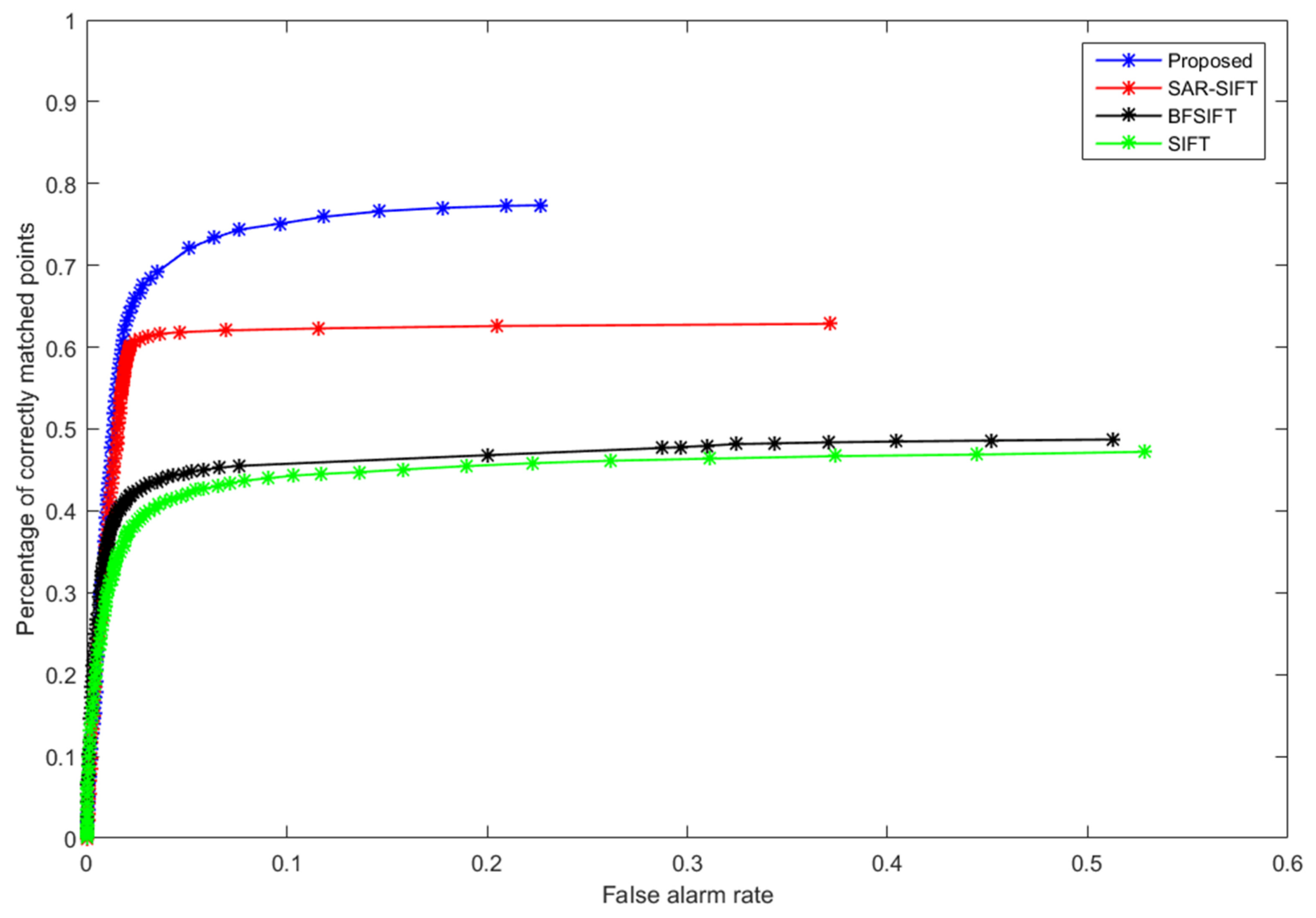
3.2. Experiments on Rotation Invariance
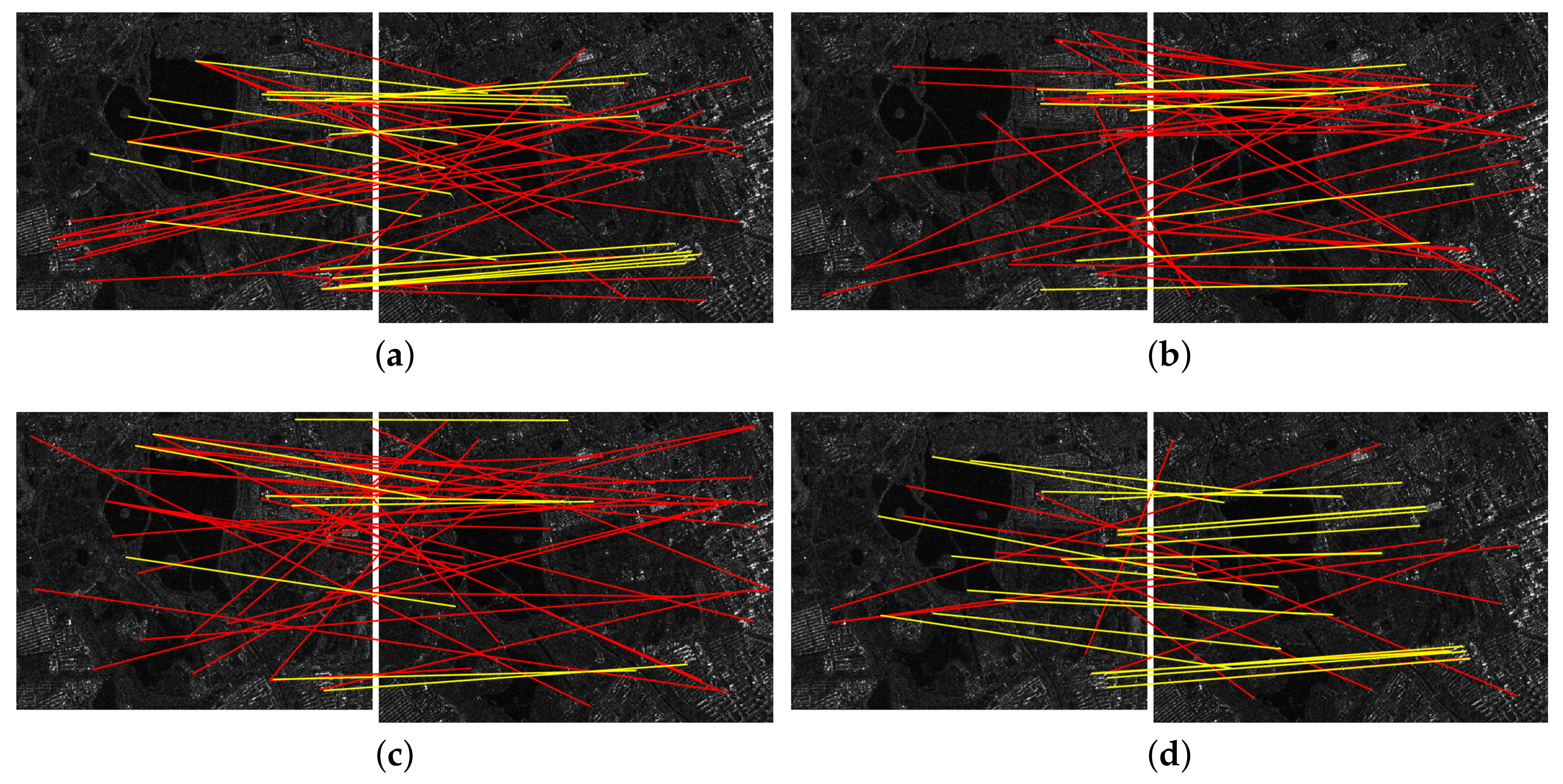
3.3. Experiments on Satellite SAR Images with Complex Conditions
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dellinger, F.; Delon, J.; Gousseau, Y.; Michel, J.; Tupin, F. SAR-SIFT: A SIFT-like algorithm for SAR images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 453–466. [Google Scholar] [CrossRef]
- Sui, H.; Xu, C.; Liu, J.; Hua, F. Automatic optical-to-SAR image registration by iterative line extraction and Voronoi integrated spectral point matching. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6058–6072. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, J.; Zhang, Y.; Zou, B. Automatic registration of sar and optical image based on multi-features and multi-constraints. In Proceedings of the 2010 IEEE International Conference on Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; pp. 1019–1022. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Cpmput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z. Feature-based image registration using the shape context. Int. J. Remote Sens. 2010, 31, 2169–2177. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, S.; Sui, H.; Li, Y.; Li, L. Automatic registration of SAR and optical image based on line and graph spectral theory. In Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, Suzhou, China, 14–16 May 2014; p. 377. [Google Scholar]
- Ma, J.; Zhou, H.; Zhao, J.; Gao, Y.; Jiang, J.; Tian, J. Robust feature matching for remote sensing image registration via locally linear transforming. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6469–6481. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Rabin, J.; Delon, J.; Gousseau, Y.; Moisan, L. MAC-RANSAC: A robust algorithm for the recognition of multiple objects. In Proceedings of the Fifth International Symposium on 3D Data Processing, Visualization and Transmission (3DPTV 2010), Paris, France, 17–20 May 2010; p. 051. [Google Scholar]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Fan, B.; Huo, C.; Pan, C.; Kong, Q. Registration of optical and SAR satellite images by exploring the spatial relationship of the improved SIFT. IEEE Geosci. Remote Sens. Lett. 2013, 10, 657–661. [Google Scholar] [CrossRef]
- Wang, S.; You, H.; Fu, K. BFSIFT: A novel method to find feature matches for SAR image registration. IEEE Geosci. Remote Sens. Lett. 2012, 9, 649–653. [Google Scholar] [CrossRef]
- Fan, B.; Wu, F.; Hu, Z. Aggregating gradient distributions into intensity orders: A novel local image descriptor. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 2377–2384. [Google Scholar]
- Shui, P.L.; Cheng, D. Edge detector of SAR images using Gaussian-Gamma-shaped bi-windows. IEEE Geosci. Remote Sens. Lett. 2012, 9, 846–850. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Xia, G.S.; Delon, J.; Gousseau, Y. Shape-based invariant texture indexing. Int. J. Cpmput. Vis. 2010, 88, 382–403. [Google Scholar] [CrossRef]
- Dai, X.; Khorram, S. A feature-based image registration algorithm using improved chain-code representation combined with invariant moments. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2351–2362. [Google Scholar]
- Yasein, M.S.; Agathoklis, P. Automatic and robust image registration using feature points extraction and Zernike moments invariants. In Proceedings of the Fifth IEEE International Symposium on Signal Processing and Information Technology, Athens, Greece, 18–21 December 2005; pp. 566–571. [Google Scholar]
- Wong, A.; Clausi, D.A. ARRSI: Automatic registration of remote-sensing images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1483–1493. [Google Scholar] [CrossRef]
- Yang, W.; Dai, D.; Triggs, B.; Xia, G.S. SAR-based terrain classification using weakly supervised hierarchical Markov aspect models. IEEE Trans. Image Process. 2012, 21, 4232–4243. [Google Scholar] [CrossRef] [PubMed]
- Hu, F.; Xia, G.S.; Hu, J.; Zhang, L. Transferring deep convolutional neural networks for the scene classification of high-resolution remote sensing imagery. Remote Sens. 2015, 7, 14680–14707. [Google Scholar] [CrossRef]
- Yang, W.; Yin, X.; Xia, G.S. Learning high-level features for satellite image classification with limited labeled samples. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4472–4482. [Google Scholar] [CrossRef]
- Hu, F.; Xia, G.S.; Wang, Z.; Huang, X.; Zhang, L.; Sun, H. Unsupervised feature learning via spectral clustering of multidimensional patches for remotely sensed scene classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2015–2030. [Google Scholar] [CrossRef]
- Liu, K.; Skibbe, H.; Schmidt, T.; Blein, T.; Palme, K.; Brox, T.; Ronneberger, O. Rotation-invariant HOG descriptors using fourier analysis in polar and spherical coordinates. Int. J. Cpmput. Vis. 2014, 106, 342–364. [Google Scholar] [CrossRef]
- Zhang, Q.; Shen, X.; Xu, L.; Jia, J. Rolling guidance filter. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 815–830. [Google Scholar]
- Gauglitz, S.; Turk, M.; Höllerer, T. Improving Keypoint Orientation Assignment. In Proceedings of the British Machine Vision Conference (BMVC), Dundee, UK, 29 August–2 September 2011; pp. 1–11. [Google Scholar]
- Salentinig, A.; Gamba, P. Combining SAR-based and multispectral-based extractions to map urban areas at multiple spatial resolutions. IEEE Geosci. Remote Sens. Mag. 2015, 3, 100–112. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Set | Sensor | Mode | Polarization | Date | Direction | Looks | Size |
|---|---|---|---|---|---|---|---|
| a | Radarsat-2 | SM | HH | June 2008 | * | 1 | |
| a | Radarsat-2 | SM | HH | June 2009 | * | 4 | |
| b | GF-3 | QPSI | VV | 9 December 2016 | DEC | * | |
| b | GF-3 | QPSI | HV | 9 December 2016 | DEC | * | |
| c | GF-3 | FSI | HH | 19 August 2016 | DEC | * | |
| c | GF-3 | FSI | HH | 20 September 2016 | ASC | * |
| Set | SAR-SIFT | BFSIFT | SIFT | Proposed | |
|---|---|---|---|---|---|
| CMR | a | 15/44 | 29/73 | 24/76 | 30/40 |
| RMSE (pixel) | a | 1.22 | 1.28 | 1.63 | 0.89 |
| SD | a | 0.6545 | 1.0818 | 1.4436 | 0.4816 |
| ME | a | 2.5840 | 2.3780 | 4.4502 | 1.9676 |
| CMR | b | 17/44 | 7/45 | 9/57 | 21/41 |
| RMSE (pixel) | b | 1.91 | 2.57 | 2.78 | 1.29 |
| SD | b | 1.1503 | 1.5380 | 1.5040 | 0.7455 |
| ME | b | 2.8800 | 4.2722 | 5.6833 | 2.7870 |
| CMR | c | 13/56 | 9/66 | 7/55 | 9/54 |
| RMSE (pixel) | c | 1.45 | 2.89 | 2.34 | 1.78 |
| SD | c | 0.6510 | 1.7002 | 1.2165 | 1.1036 |
| ME | c | 2.0994 | 6.5029 | 4.6881 | 3.9308 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Y.; Wang, F.; Wan, L.; You, H. An Advanced Rotation Invariant Descriptor for SAR Image Registration. Remote Sens. 2017, 9, 686. https://doi.org/10.3390/rs9070686
Xiang Y, Wang F, Wan L, You H. An Advanced Rotation Invariant Descriptor for SAR Image Registration. Remote Sensing. 2017; 9(7):686. https://doi.org/10.3390/rs9070686
Chicago/Turabian StyleXiang, Yuming, Feng Wang, Ling Wan, and Hongjian You. 2017. "An Advanced Rotation Invariant Descriptor for SAR Image Registration" Remote Sensing 9, no. 7: 686. https://doi.org/10.3390/rs9070686
APA StyleXiang, Y., Wang, F., Wan, L., & You, H. (2017). An Advanced Rotation Invariant Descriptor for SAR Image Registration. Remote Sensing, 9(7), 686. https://doi.org/10.3390/rs9070686