
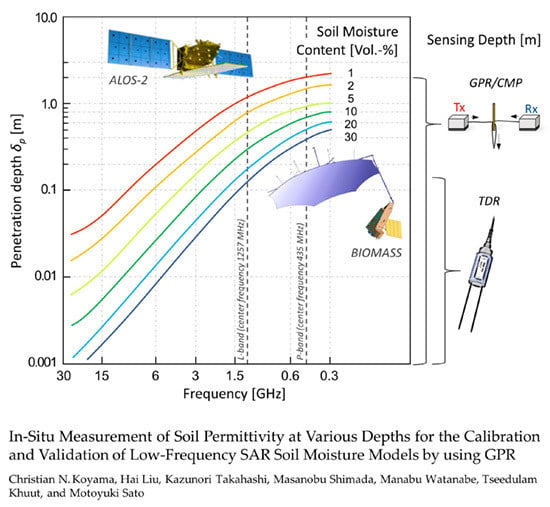
In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR


 , and
, and
Abstract
:
1. Introduction
2. Principles of Soil Moisture Retrieval from Microwave Measurements
3. Materials and Methods
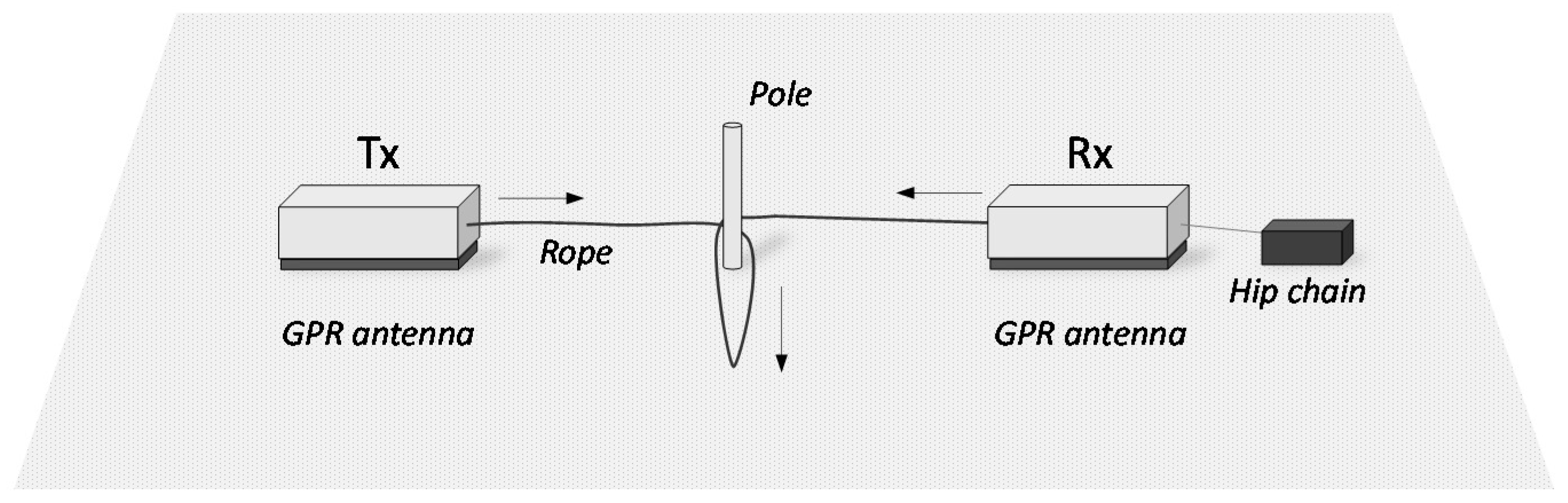
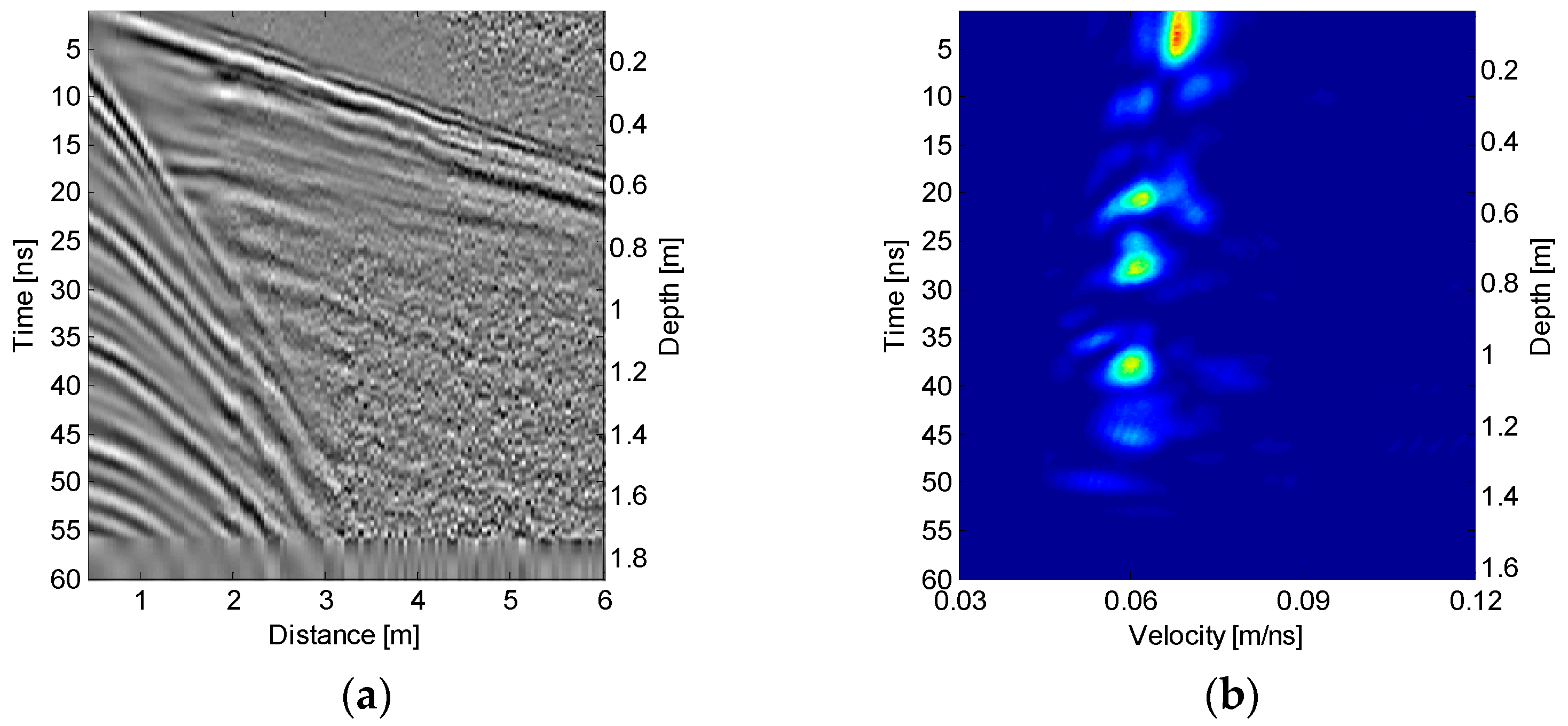
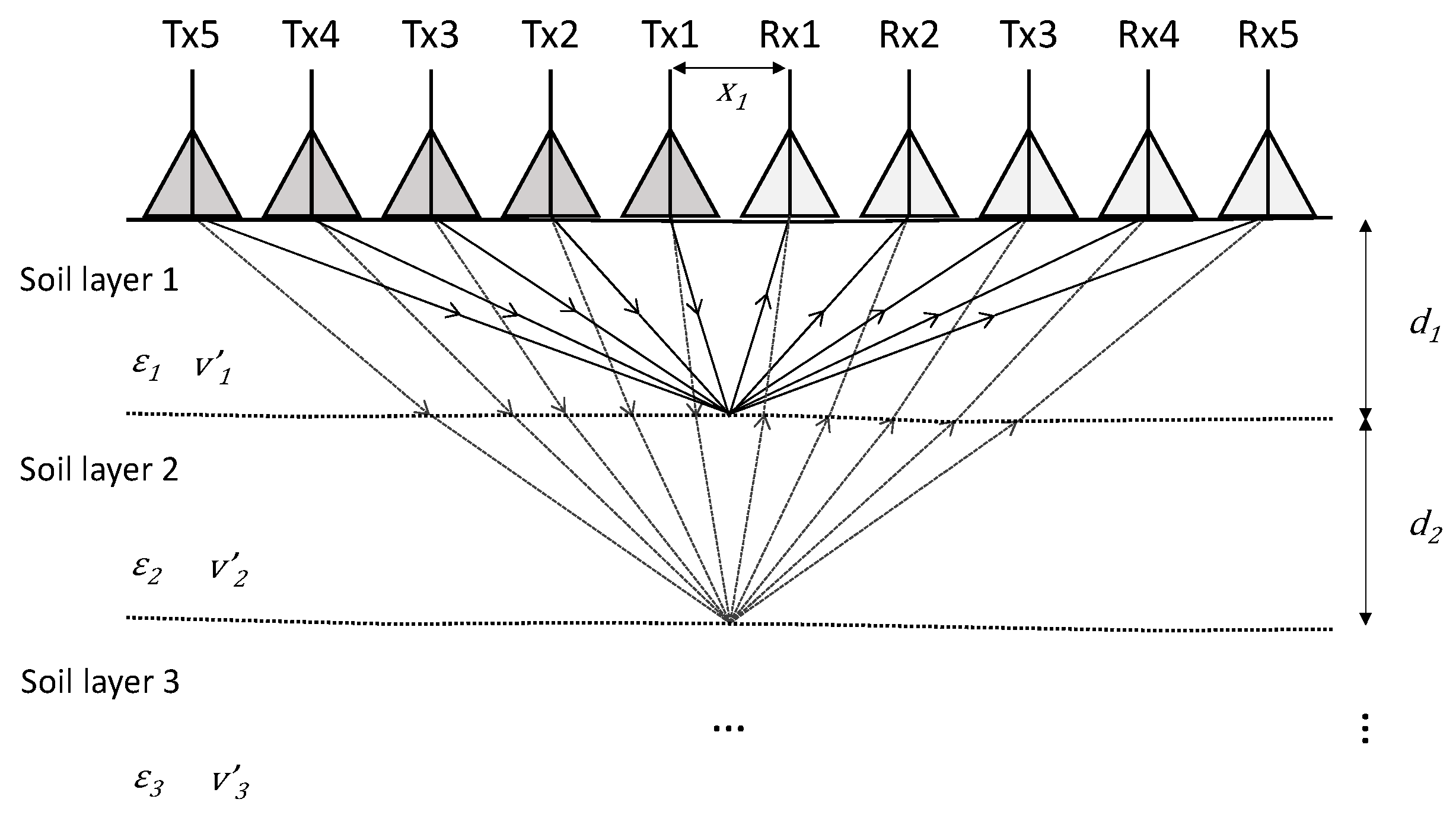
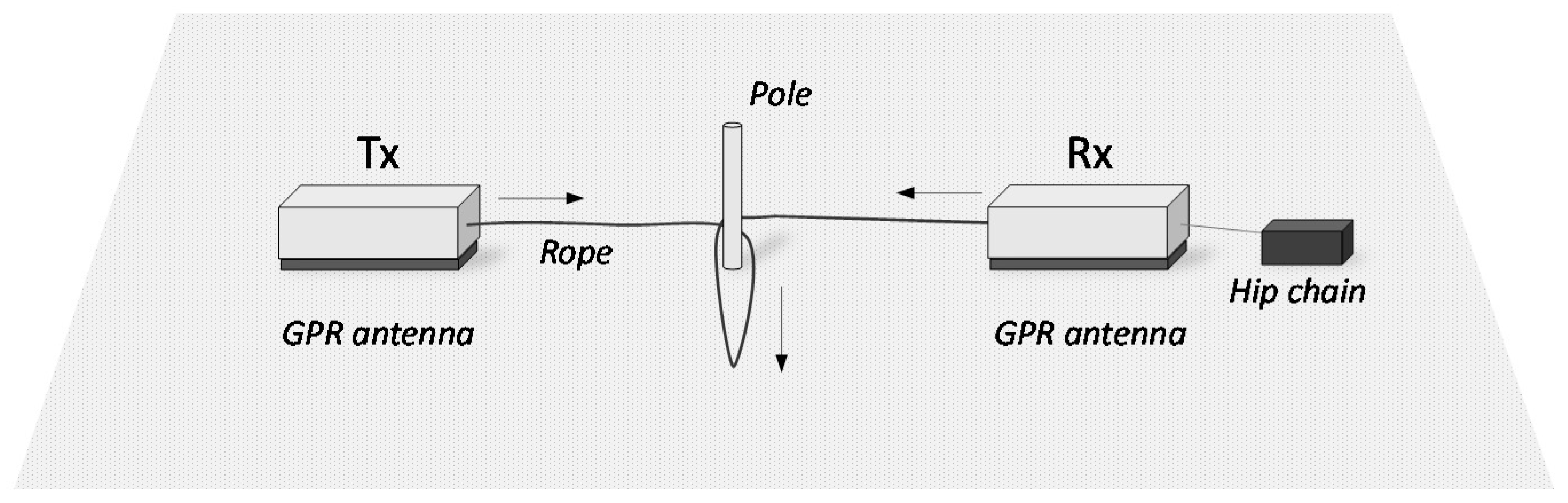
3.1. GPR Soil Moisture Estimation by Means of CMP Velocity Analysis
Dielectric Constant Retrieval at Various Depths
3.2. Airborne and Ground-Based SAR Derived Soil Moisture
4. Results and Discussion
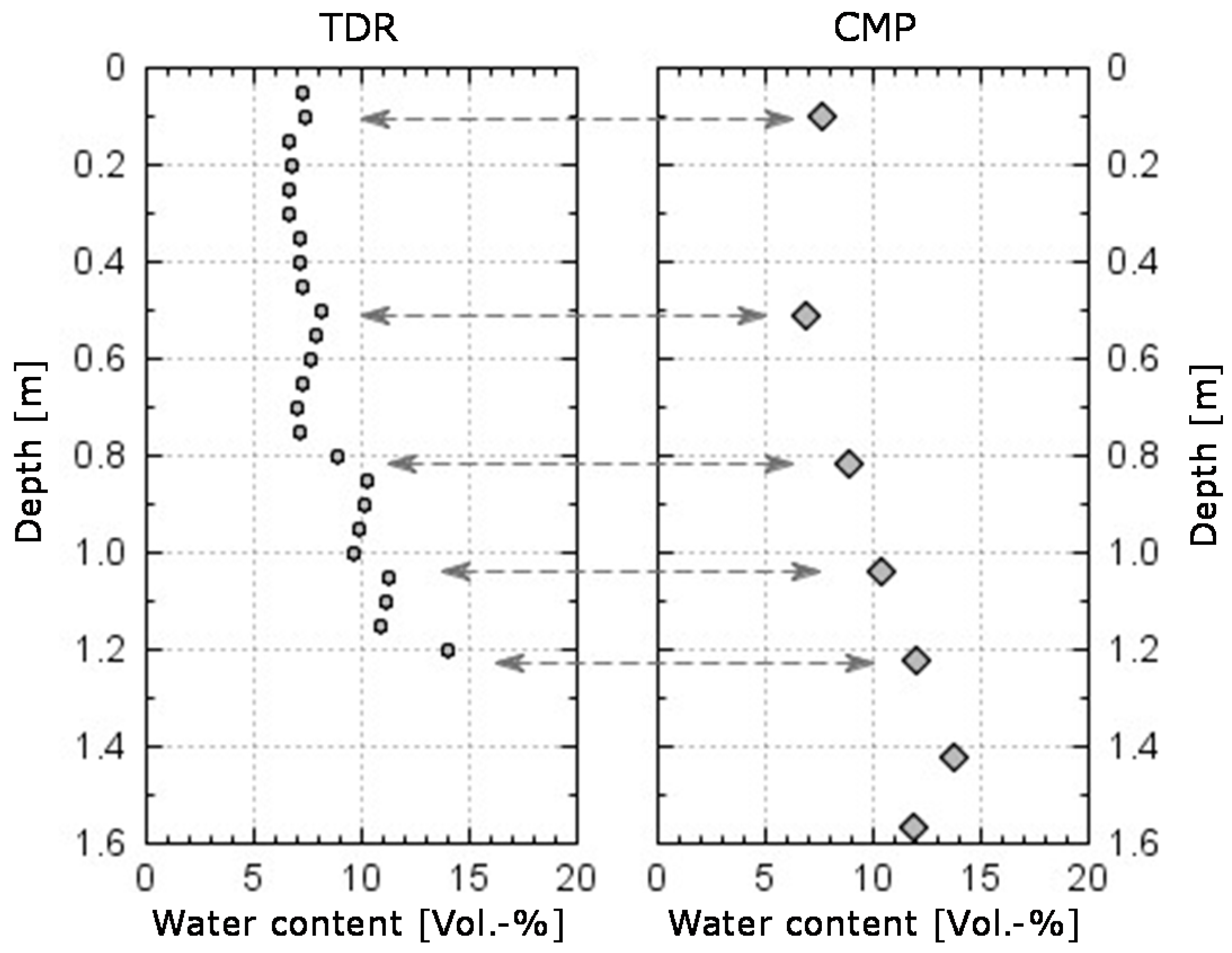
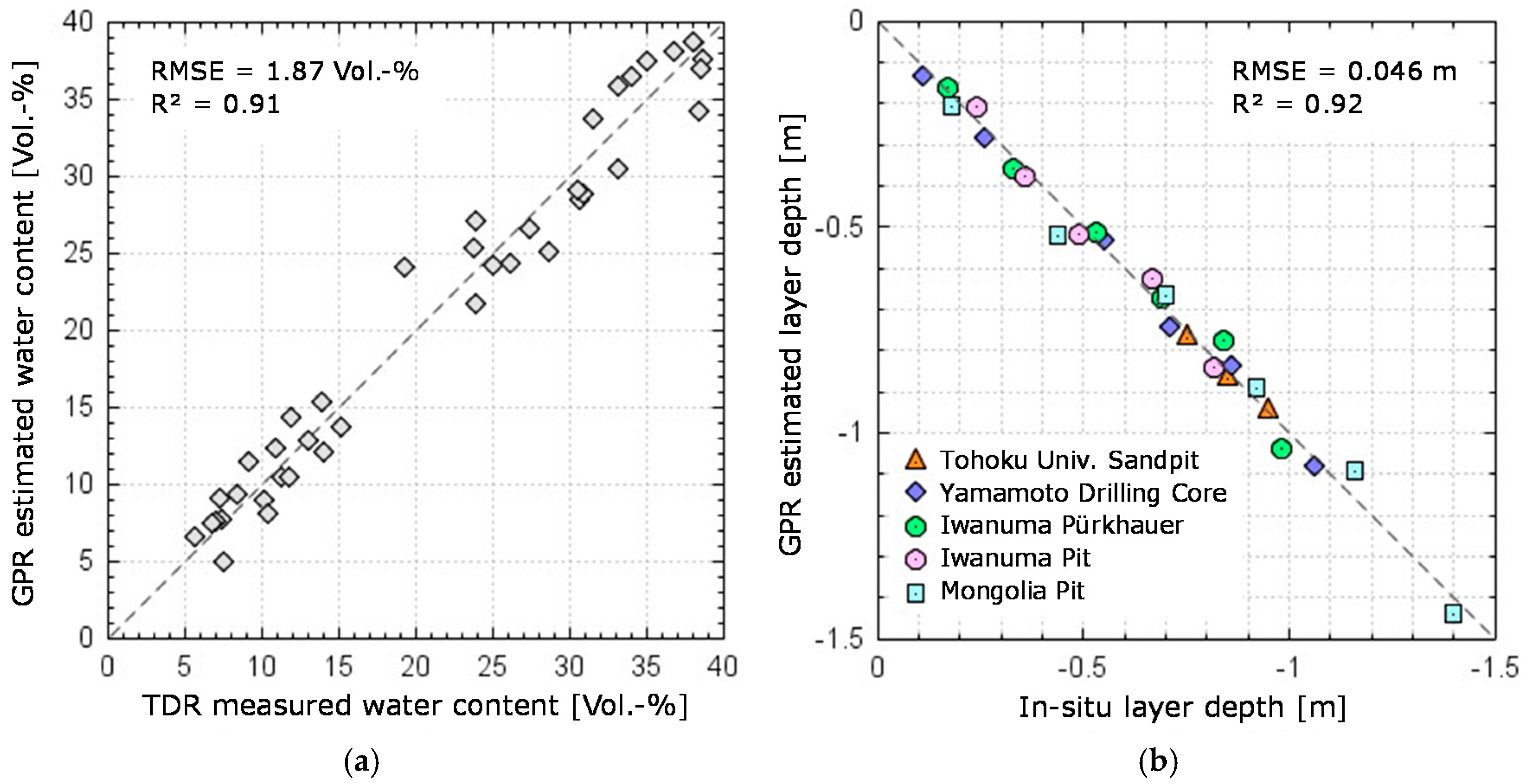
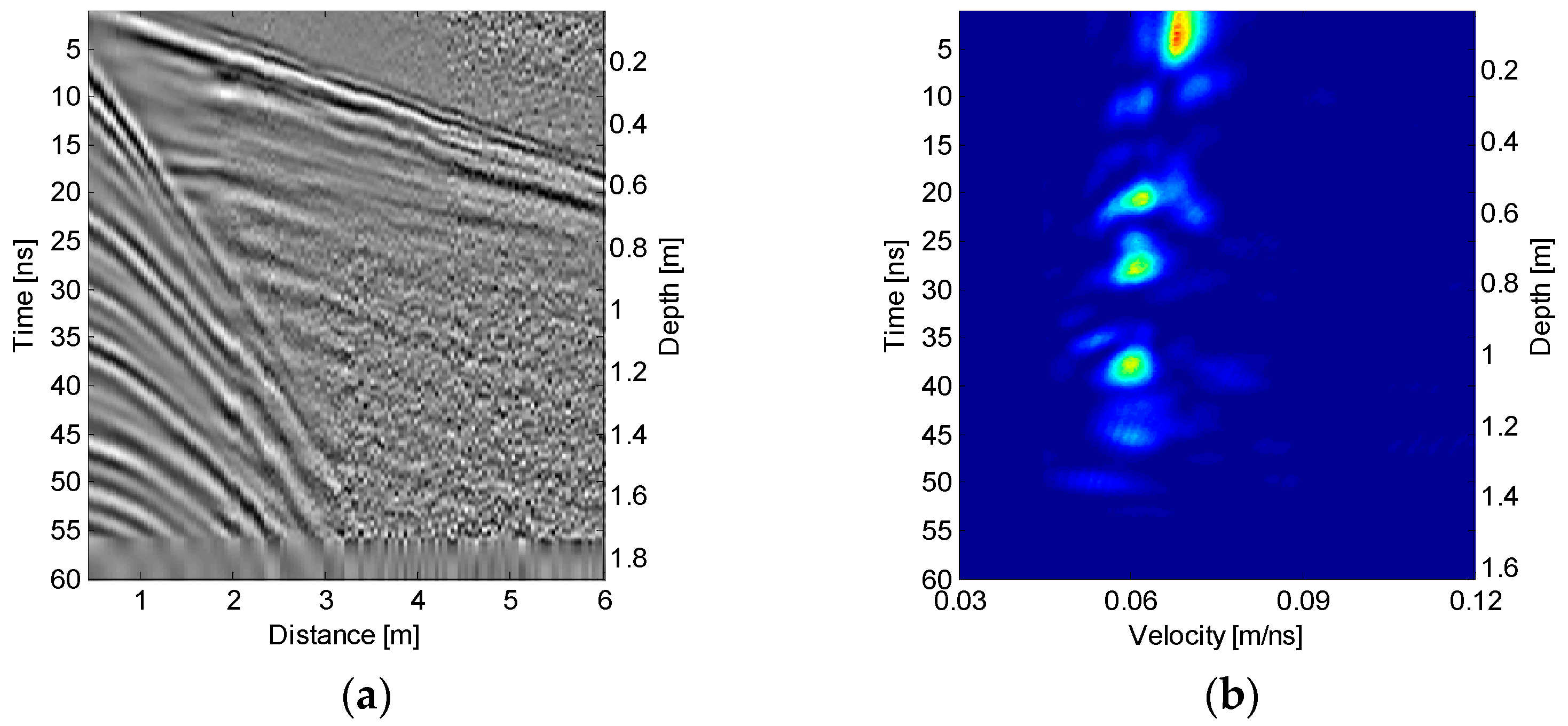
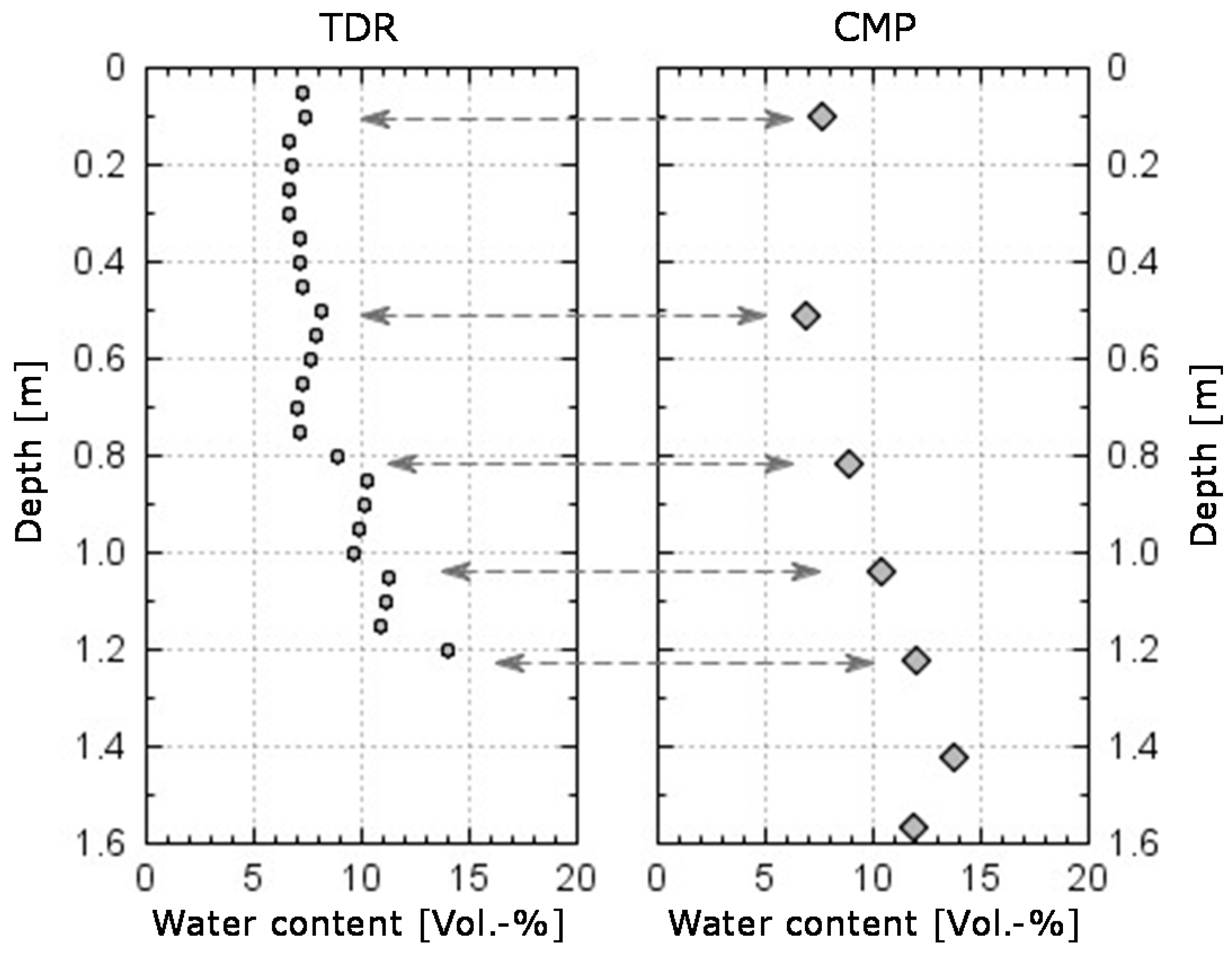
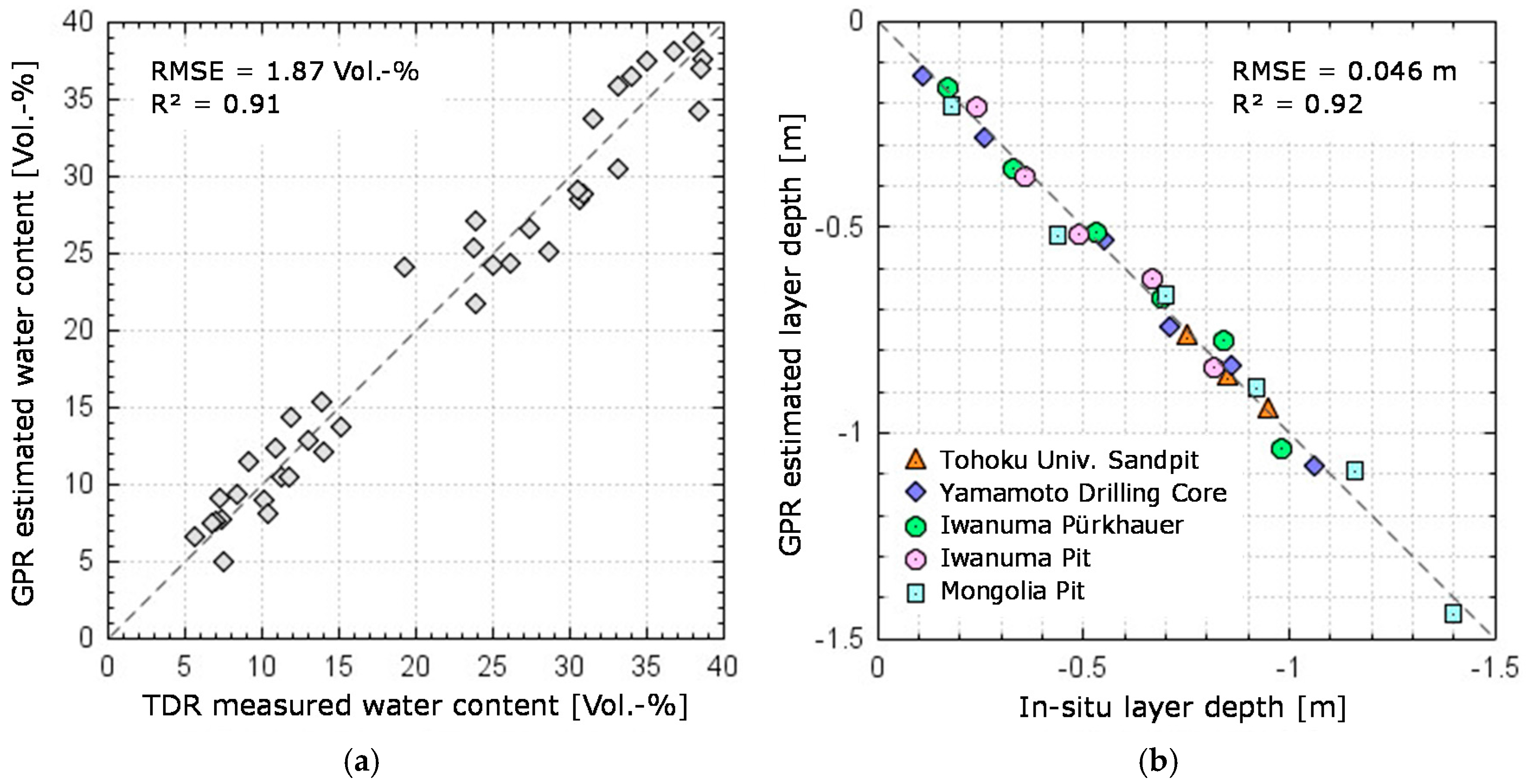
4.1. Validation of the Proposed CMP Method
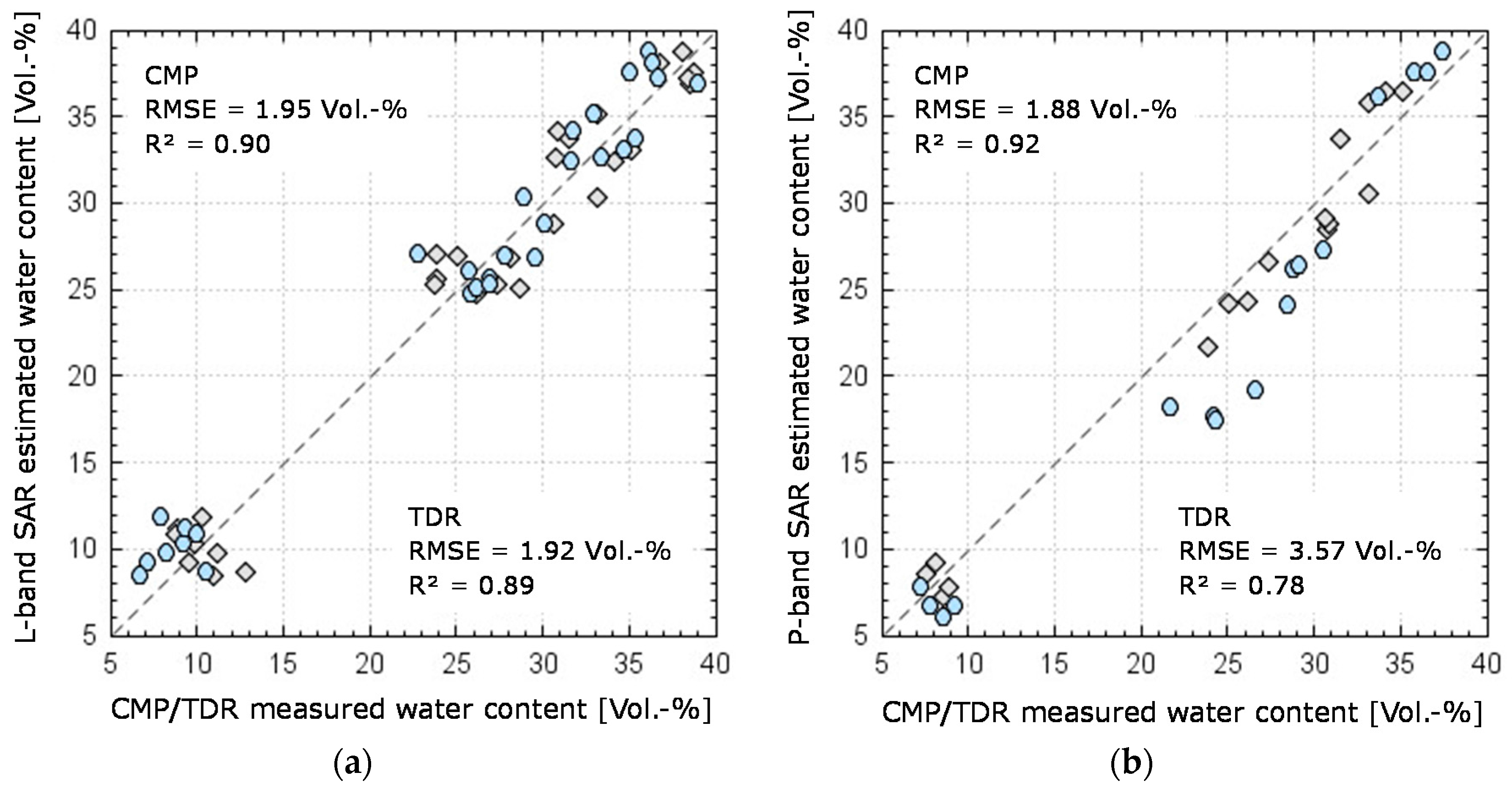
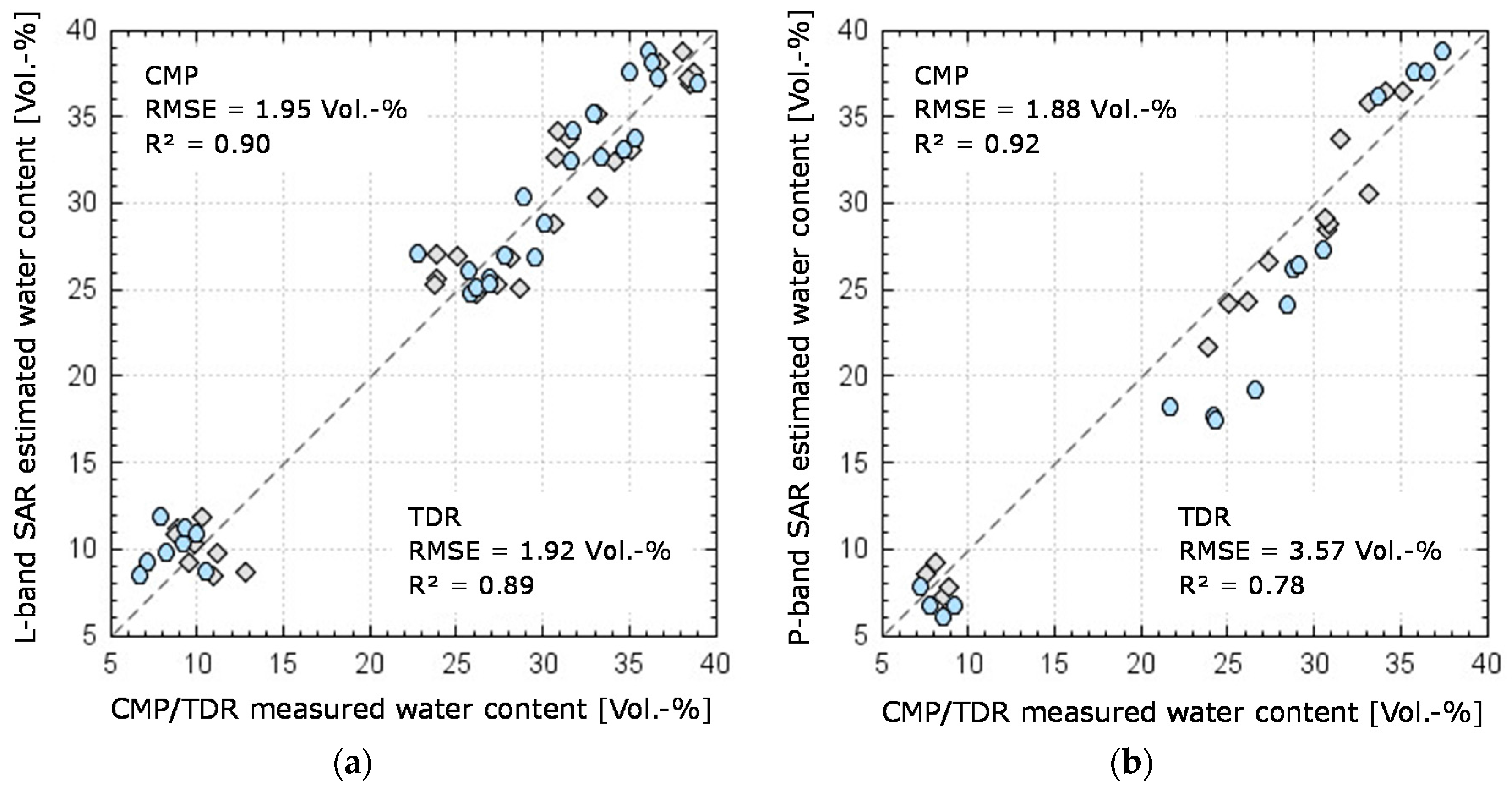
4.2. Comparison of GPR and SAR Derived Soil Moisture Estimates
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jagdhuber, T.; Hajnsek, I.; Papathanassiou, K.P. An iterative generalized hybrid decomposition for soil moisture retrieval under vegetation cover using fully polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3911–3922. [Google Scholar] [CrossRef]
- Koyama, C.N.; Schneider, K.; Sato, M. Development of a biomass corrected soil moisture retrieval model for dual-polarization ALOS-2 data based on ALOS/PALSAR and Pi-SAR-L2 observations. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1316–1319. [Google Scholar]
- Bruscantini, C.A.; Konings, A.G.; Narvekar, P.S.; McColl, K.A.; Entekhabi, D.; Grings, F.M.; Karszenbaum, H. L-band radar soil moisture retrieval without ancillary information. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5526–5540. [Google Scholar] [CrossRef]
- Koyama, C.N.; Korres, W.; Fiener, P.; Schneider, K. Variability of surface soil moisture observed from multitemporal C-band synthetic aperture radar and field data. Vadose Zone J. 2010, 9, 1014–1024. [Google Scholar] [CrossRef]
- Paloscia, S.; Pettinato, S.; Santi, E.; Notarnicola, C.; Pasolli, L.; Reppucci, A. Soil moisture mapping using sentinel-1 images: Algorithm and preliminary validation. Remote Sens. Environ. 2013, 134, 234–248. [Google Scholar] [CrossRef]
- Bai, X.J.; He, B.B.; Li, X.W. Optimum surface roughness to parameterize advanced integral equation model for soil moisture retrieval in prairie area using Radarsat-2 data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2437–2449. [Google Scholar] [CrossRef]
- Baghdadi, N.; Aubert, M.; Zribi, M. Use of TerraSAR-X data to retrieve soil moisture over bare soil agricultural fields. IEEE Geosci. Remote Sens. Lett. 2012, 9, 512–516. [Google Scholar] [CrossRef]
- Gupta, D.K.; Prasad, R.; Kumar, P.; Vishwakarma, A.K. Soil moisture retrieval using ground based bistatic scatterometer data at X-band. Adv. Space Res. 2017, 59, 996–1007. [Google Scholar] [CrossRef]
- Jagdhuber, T.; Hajnsek, I.; Caputo, M.; Papathanassiou, K.P. Dual-polarimetry for soil moisture inversion at X-band. In Proceedings of the EUSAR 2014, 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014. [Google Scholar]
- Arcioni, M.; Bensi, P.; Fehringer, M.; Fois, F.; Hélière, F.; Lin, C.C.; Scipal, K. The biomass mission, status of the satellite system. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1413–1416. [Google Scholar]
- Yilmaz, O. Seismic Data Analysis: Processing, Inversion, and Interpretation of Seismic Data; SEG Books: Tusla, OK, USA, 2003. [Google Scholar]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; Institution of Engineering and Technology: London, UK, 2007. [Google Scholar]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Weiler, K.W.; Steenhuis, T.S.; Boll, J.; Kung, K.J.S. Comparison of ground penetrating radar and time-domain reflectometry as soil water sensors. Soil Sci. Soc. Am. J. 1998, 62, 1237–1239. [Google Scholar] [CrossRef]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil moisture measurement for ecological and hydrological watershed-scale observatories: A review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Vereecken, H.; Huisman, J.A.; Bogena, H.; Vanderborght, J.; Vrugt, J.A.; Hopmans, J.W. On the value of soil moisture measurements in vadose zone hydrology: A review. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Minet, J.; Bogaert, P.; Vanclooster, M.; Lambot, S. Validation of ground penetrating radar full-waveform inversion for field scale soil moisture mapping. J. Hydrol. 2012, 424, 112–123. [Google Scholar] [CrossRef]
- Ardekani, M.R.M. Off- and on-ground GPR techniques for field-scale soil moisture mapping. Geoderma 2013, 200, 55–66. [Google Scholar] [CrossRef]
- Huisman, J.A.; Snepvangers, J.J.J.C.; Bouten, W.; Heuvelink, G.B.M. Mapping spatial variation in surface soil water content: Comparison of ground-penetrating radar and time domain reflectometry. J. Hydrol. 2002, 269, 194–207. [Google Scholar] [CrossRef]
- Weihermuller, L.; Huisman, J.A.; Lambot, S.; Herbst, M.; Vereecken, H. Mapping the spatial variation of soil water content at the field scale with different ground penetrating radar techniques. J. Hydrol. 2007, 340, 205–216. [Google Scholar] [CrossRef]
- Bevan, M.J.; Endres, A.L.; Rudolph, D.L.; Parkin, G. The non-invasive characterization of pumping-induced dewatering using ground penetrating radar. J. Hydrol. 2003, 281, 55–69. [Google Scholar] [CrossRef]
- Lu, Q.; Sato, M. Estimation of hydraulic property of an unconfined aquifer by GPR. Sens. Imaging Int. J. 2007, 8, 83–99. [Google Scholar] [CrossRef]
- Turesson, A. Water content and porosity estimated from ground-penetrating radar and resistivity. J. Appl. Geophys. 2006, 58, 99–111. [Google Scholar] [CrossRef]
- Mayne, W.H. Common reflection point horizontal data stacking techniques. Geophysics 1962, 27, 927–938. [Google Scholar] [CrossRef]
- Duncan, G.; Beresford, G. Some analyses of 2-d median f-k filters. Geophysics 1995, 60, 1157–1168. [Google Scholar] [CrossRef]
- Dix, C.H. Seismic velocities from surface measurements. Geophysics 1955, 20, 68–86. [Google Scholar] [CrossRef]
- Liu, H.; Yokota, Y.; Takahashi, K.; Sato, M. Monitoring of dynamic groundwater level change by ground penetrating radar for quantitative estimation of hydraulic parameters. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3214–3217. [Google Scholar]
- Greaves, R.J.; Lesmes, D.P.; Lee, J.M.; Toksoz, M.N. Velocity variations and water content estimated from multi-offset, ground-penetrating radar. Geophysics 1996, 61, 683–695. [Google Scholar] [CrossRef]
- Nakashima, Y.; Zhou, H.; Sato, M. Estimation of groundwater level by GPR in an area with multiple ambiguous reflections. J. Appl. Geophys. 2001, 47, 241–249. [Google Scholar] [CrossRef]
- Sato, M.; Koyama, C.N. Fundamental survey on the microwave soil moisture measurement. In Proceedings of the International Workshop on Terrestrial Change in Mongolia, Tokyo, Japan, 20–21 December 2013; pp. 26–30. [Google Scholar]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil-water content - measurements in coaxial transmission-lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Davis, J.L.; Annan, A.P. Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Koyama, C.N.; Sato, M. Estimation of soil moisture and debris pile volume from Pi-SAR2X and Pi-SAR-L2 square-flight data. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1516–1519. [Google Scholar]
- Fisher, S.C.; Stewart, R.R.; Jol, H.M. Ground penetrating radar (GPR) data enhancement using seismic techniques. J. Environ. Eng. Geophys. 1996, 1, 89–96. [Google Scholar] [CrossRef]
- Steelman, C.M.; Endres, A.L. Assessing vertical soil moisture dynamics using multi-frequency GPR common-midpoint soundings. J. Hydrol. 2012, 436, 51–66. [Google Scholar] [CrossRef]
- Sato, M.; Liu, H.; Komagino, T.; Takahashi, K. Archaeological survey by gpr for recovery from 3.11 great earthquake and tsunami in east Japan. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 25–30. [Google Scholar]
- Neidell, N.S.; Taner, M.T. Semblance and other coherency measures for multichannel data. Geophysics 1971, 36, 482–497. [Google Scholar] [CrossRef]
- Liu, H.; Sato, M. Dynamic groundwater level estimation by the velocity spectrum analysis of GPR. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 413–418. [Google Scholar]
- Booth, A.D.; Clark, R.; Murray, T. Semblance response to a ground-penetrating radar wavelet and resulting errors in velocity analysis. Near Surf. Geophys. 2010, 8, 235–246. [Google Scholar] [CrossRef]
- Shimada, M.; Kawano, N.; Watanabe, M.; Motooka, T.; Ohki, M. Calibration and validation of the Pi-SAR-L2. In Proceedings of the 2013 Asia-Pacific Conference on Synthetic Aperture Radar, Tsukuba, Japan, 23–27 September 2013; pp. 194–197. [Google Scholar]
- Shimada, M.; Watanabe, M.; Motooka, T.; Kankaku, Y. PALSAR-2 polarimetric performance and the simulation study using the Pi-SAR-L2. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 21–26 July 2013; pp. 2309–2312. [Google Scholar]
- Koyama, C.N.; Sato, M. Detection and classification of subsurface objects by polarimetric radar imaging. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 440–445. [Google Scholar]
- Ulaby, F.T.; Long, D.G. Microwave Radar and Radiometric Remote Sensing; University of Michigan Press: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Fung, A.K.; Li, Z.; Chen, K.S. Backscattering from a randomly rough dielectric surface. IEEE Trans. Geosci. Remote Sens. 1992, 30, 356–369. [Google Scholar] [CrossRef]
- Chen, K.S.; Tzong-Dar, W.; Mu-King, T.; Fung, A.K. Note on the multiple scattering in an IEM model. IEEE Trans. Geosci. Remote Sens. 2000, 38, 249–256. [Google Scholar] [CrossRef]
- Tzong-Dar, W.; Chen, K.S.; Jiancheng, S.; Fung, A.K. A transition model for the reflection coefficient in surface scattering. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2040–2050. [Google Scholar] [CrossRef]
- Chen, K.S.; Tzong-Dar, W.; Leung, T.; Qin, L.; Jiancheng, S.; Fung, A.K. Emission of rough surfaces calculated by the integral equation method with comparison to three-dimensional moment method simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Fung, A.K.; Chen, K.S. An update on the IEM surface backscattering model. IEEE Geosci. Remote Sens. Lett. 2004, 1, 75–77. [Google Scholar] [CrossRef]
- Baghdadi, N.; Gherboudj, I.; Zribi, M.; Sahebi, M.; King, C.; Bonn, F. Semi-empirical calibration of the IEM backscattering model using radar images and moisture and roughness field measurements. Int. J. Remote Sens. 2004, 25, 3593–3623. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Layer | Velocity (m/ns) | Travel Time (ns) | Depth(m) | Permittivity 1 | Water Content (Vol.-%) |
|---|---|---|---|---|---|
| Layer 1 | 0.0678 | 3.3379 | 0.143 | 19.57 | 34.01 |
| Layer 2 | 0.0618 | 10.3516 | 0.319 | 23.56 | 36.59 |
| Layer 3 | 0.0622 | 20.3595 | 0.633 | 24.26 | 38.28 |
| Layer 4 | 0.0606 | 28.0705 | 0.850 | 24.50 | 39.96 |
| Layer 5 | 0.0598 | 37.8323 | 1.131 | 25.16 | 42.21 |
| Date | Sensor | Frequency | Polarizations | In-Situ Measurements |
|---|---|---|---|---|
| 8 August 2014 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR, SR 1 |
| 11 September 2014 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR, SR |
| 12 June 2015 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR, SR |
| 6 August 2015 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR, SR |
| 11 September 2015 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR, SR |
| 30 September 2015 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR |
| 10 November 2015 | GB-SAR | P-band | HH, VV | TDR, GPR, SR |
| 11 November 2015 | Pi-SAR-L2 | L-band | HH, HV, VH, VV | TDR, GPR |
| 15 April 2016 | GB-SAR | P-band | HH, VV | TDR, GPR, SR |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koyama, C.N.; Liu, H.; Takahashi, K.; Shimada, M.; Watanabe, M.; Khuut, T.; Sato, M. In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR. Remote Sens. 2017, 9, 580. https://doi.org/10.3390/rs9060580
Koyama CN, Liu H, Takahashi K, Shimada M, Watanabe M, Khuut T, Sato M. In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR. Remote Sensing. 2017; 9(6):580. https://doi.org/10.3390/rs9060580
Chicago/Turabian StyleKoyama, Christian N., Hai Liu, Kazunori Takahashi, Masanobu Shimada, Manabu Watanabe, Tseedulam Khuut, and Motoyuki Sato. 2017. "In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR" Remote Sensing 9, no. 6: 580. https://doi.org/10.3390/rs9060580
APA StyleKoyama, C. N., Liu, H., Takahashi, K., Shimada, M., Watanabe, M., Khuut, T., & Sato, M. (2017). In-Situ Measurement of Soil Permittivity at Various Depths for the Calibration and Validation of Low-Frequency SAR Soil Moisture Models by Using GPR. Remote Sensing, 9(6), 580. https://doi.org/10.3390/rs9060580