
Error Analysis of Satellite Precipitation-Driven Modeling of Flood Events in Complex Alpine Terrain

 ,
,  ,
,
Abstract
:
1. Introduction
2. Study Area, Data and Hydrologic Model
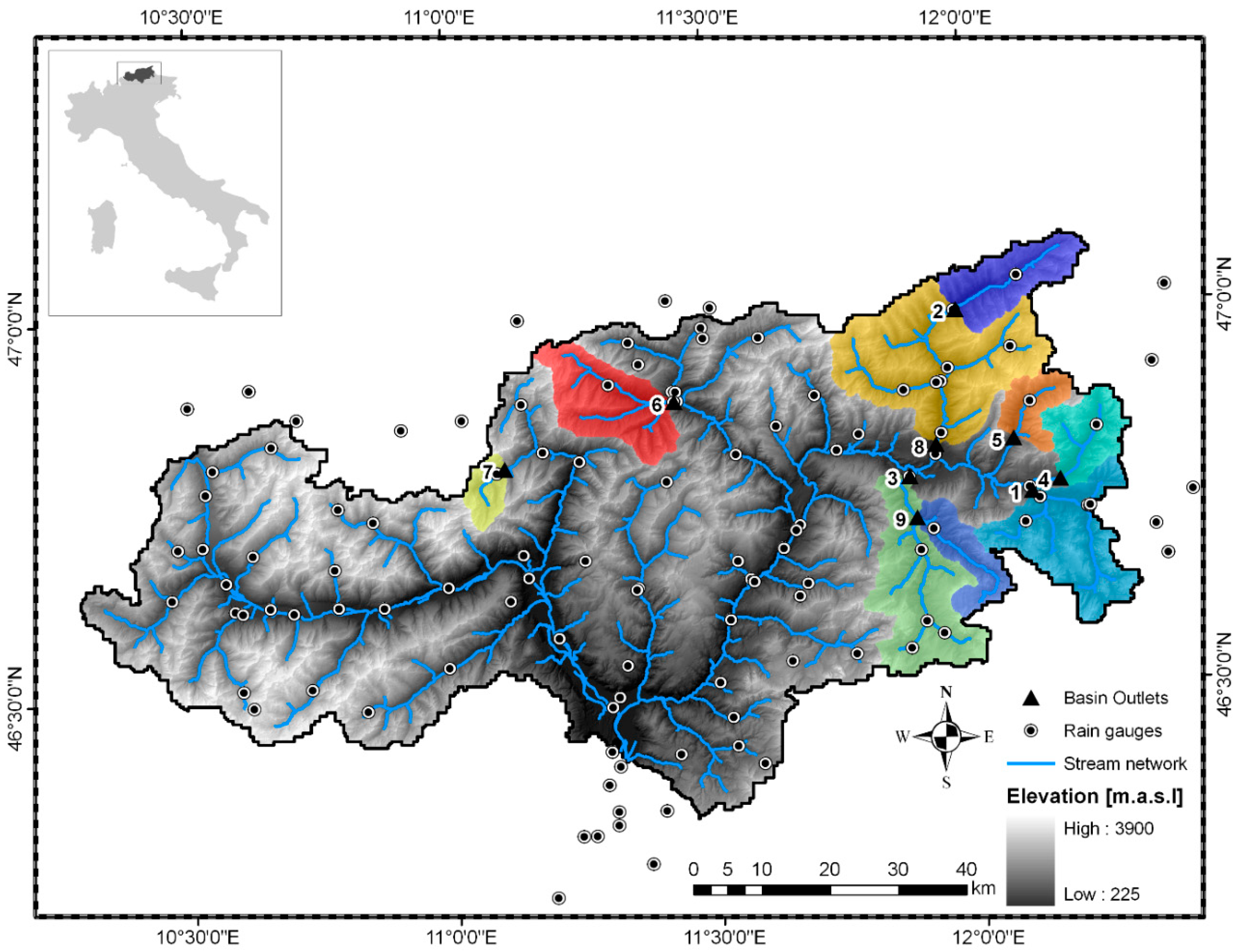
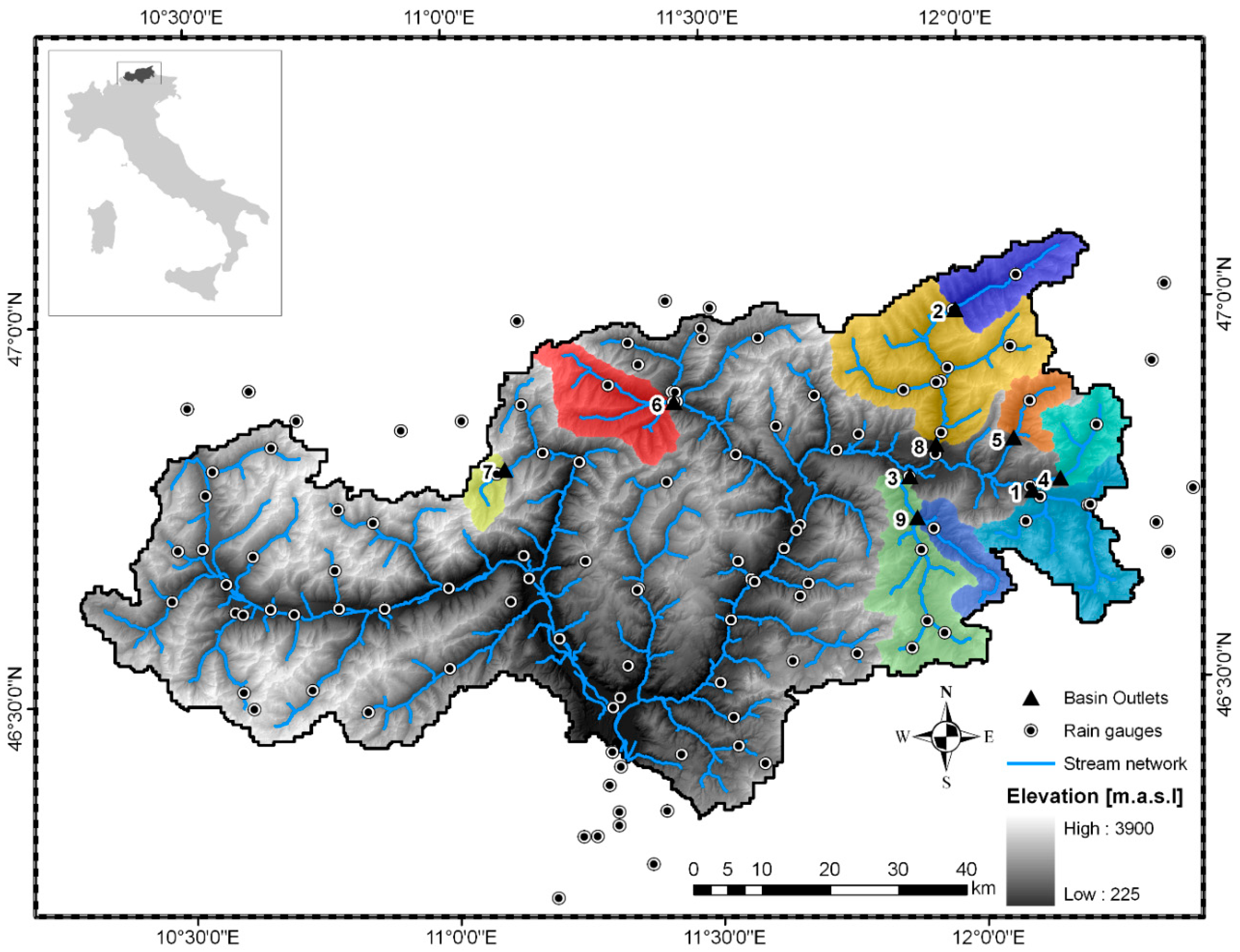
2.1. Study Area
2.2. Precipitation Data
2.3. Hydrologic Simulations
2.4. Flood Events: Archive and Flood Types
- Snow-dominated floods: events in which the input from snowmelt dominates over liquid precipitation.
- Rain-dominated events: floods with time to flow peak exceeding 24 h and moderately intense rainfall uniformly distributed over the area.
- Flash flood events: events developing in smaller basins (mostly smaller than 200 km2) triggered by intense rainfall and with time to flow peak less than 24 h.
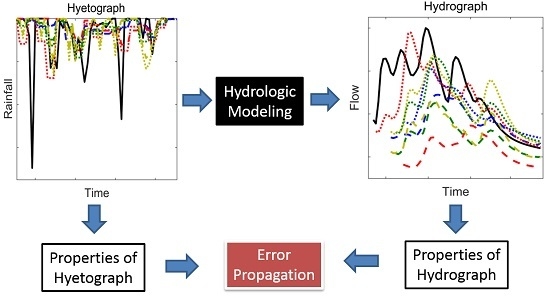
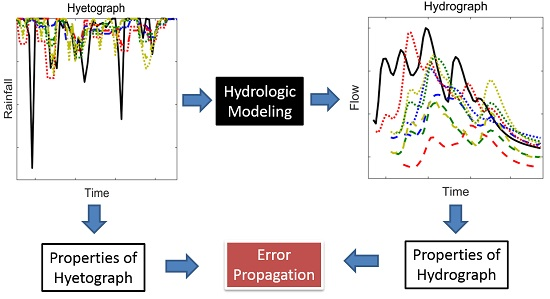
3. Methodology
3.1. Event Matching
- (1)
- The start and end hour of each flood event are identified from the simulated flow time series of all the products according to the database.
- (2)
- Continuous periods of nonzero rainfall are identified based on the basin-average rainfall time series.
- (3)
- For each product match, rainfall periods from step 2 are matched with corresponding flood events using CPM. Details of the technical steps are documented in Section 3.2.3 of Mei and Anagnostou [40]. For each flood event, CPM identifies the associated rainfall period. If more than one rainfall event satisfy the conditions, they are jointed as one rainfall event and are considered as the inducing rainfall of the flood event. These rainfall and flood event pairs together form a rainfall-runoff event.
3.2. Event Properties
3.3. Comparative Analysis
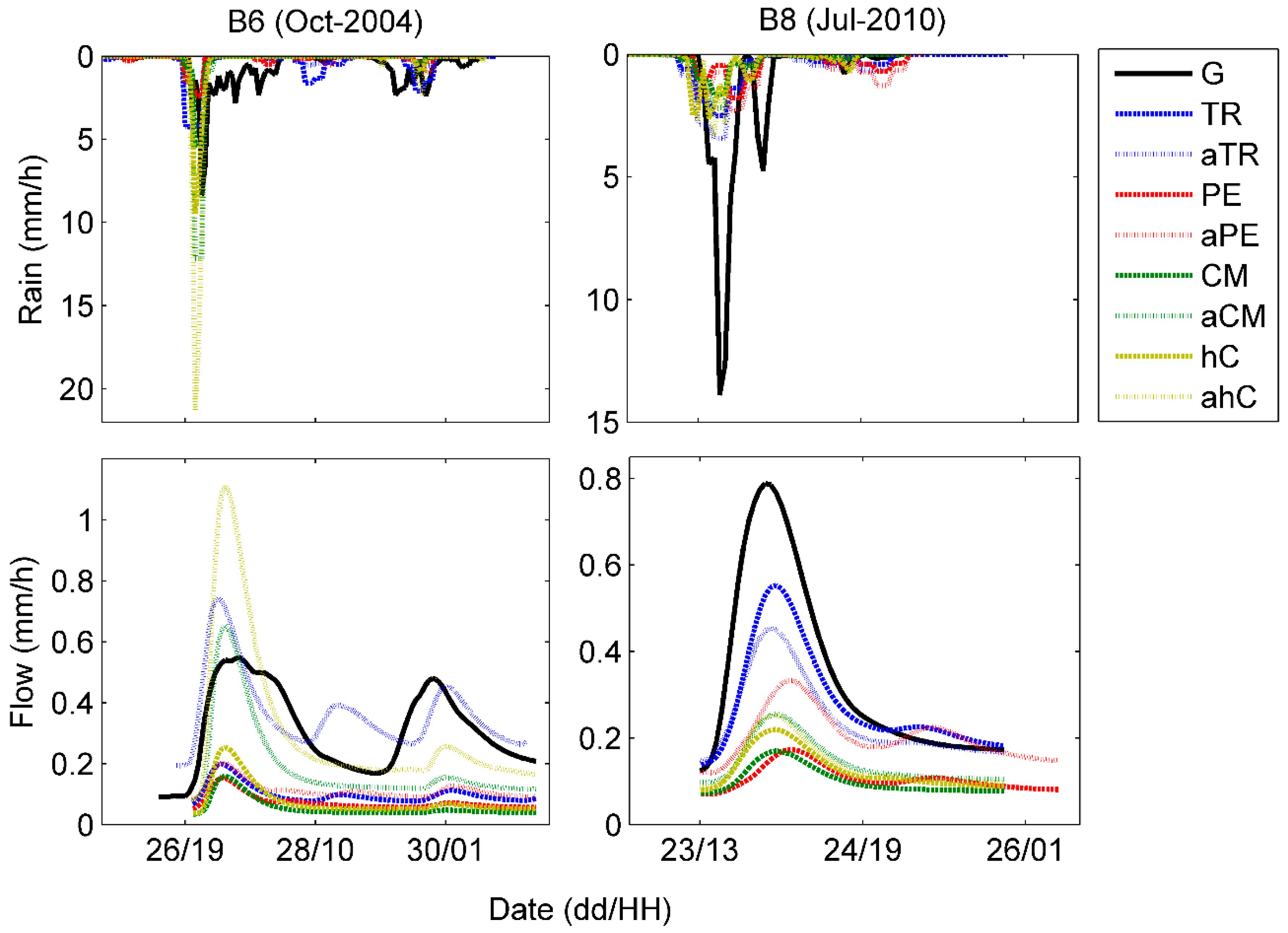
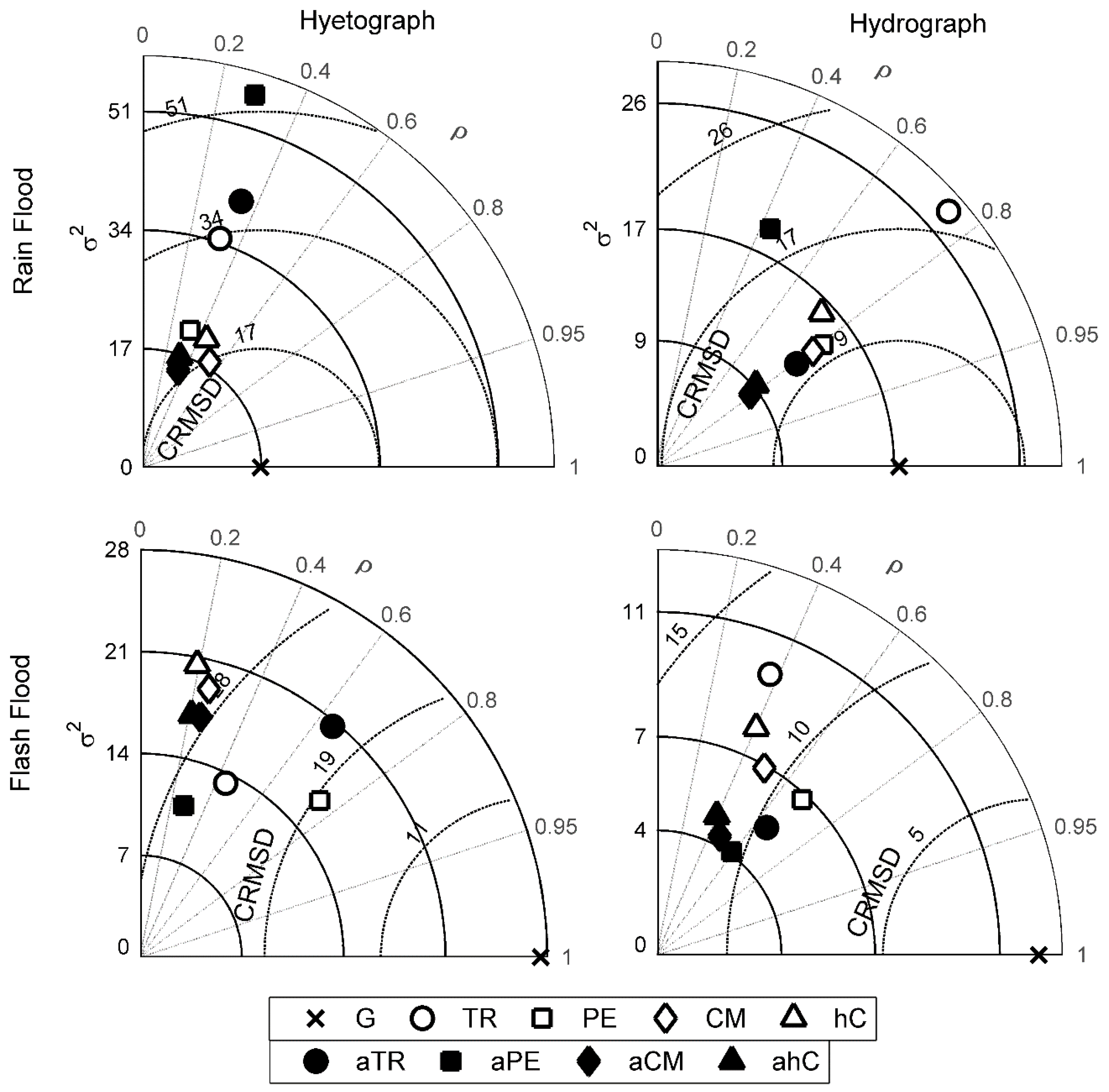
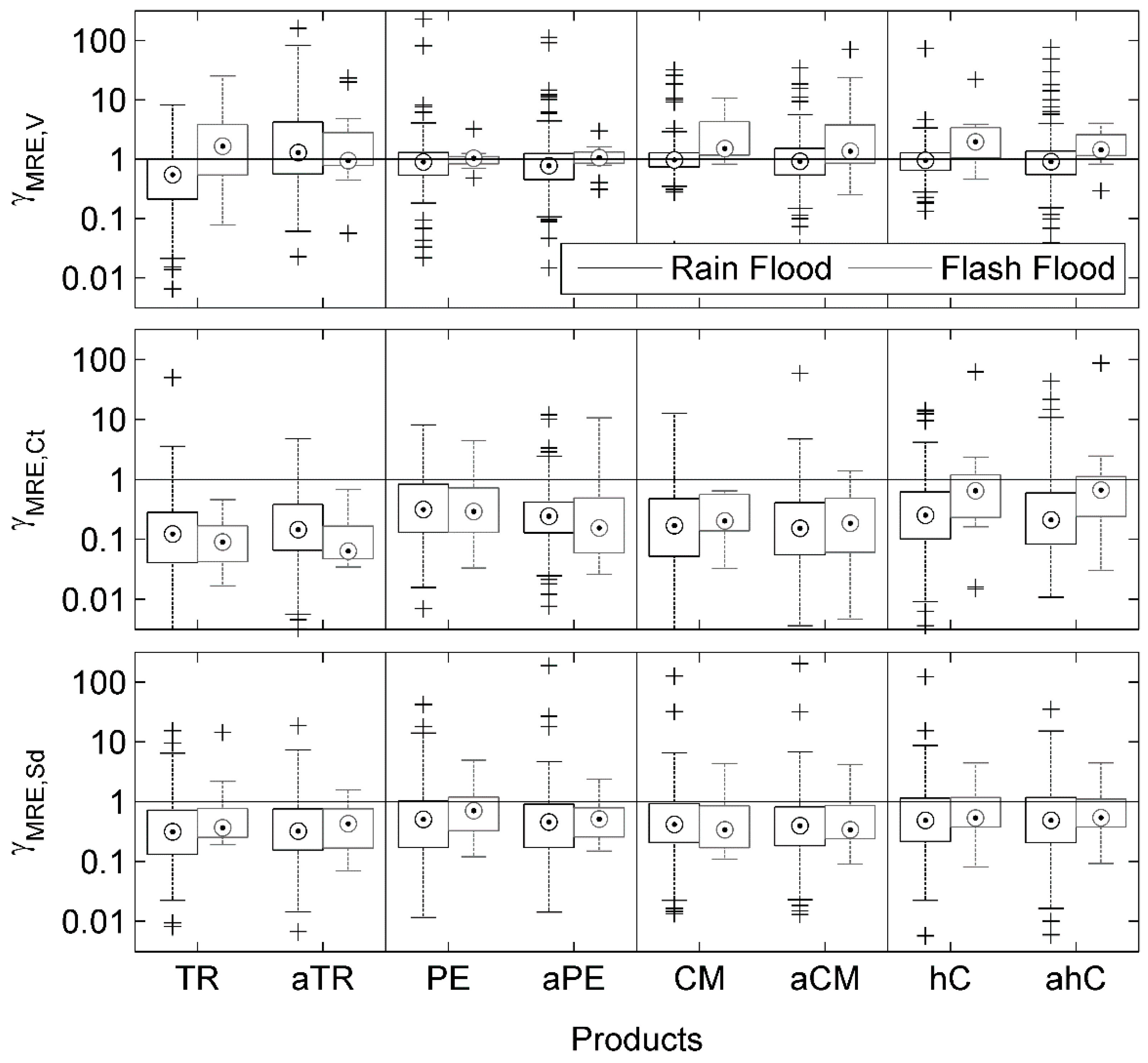
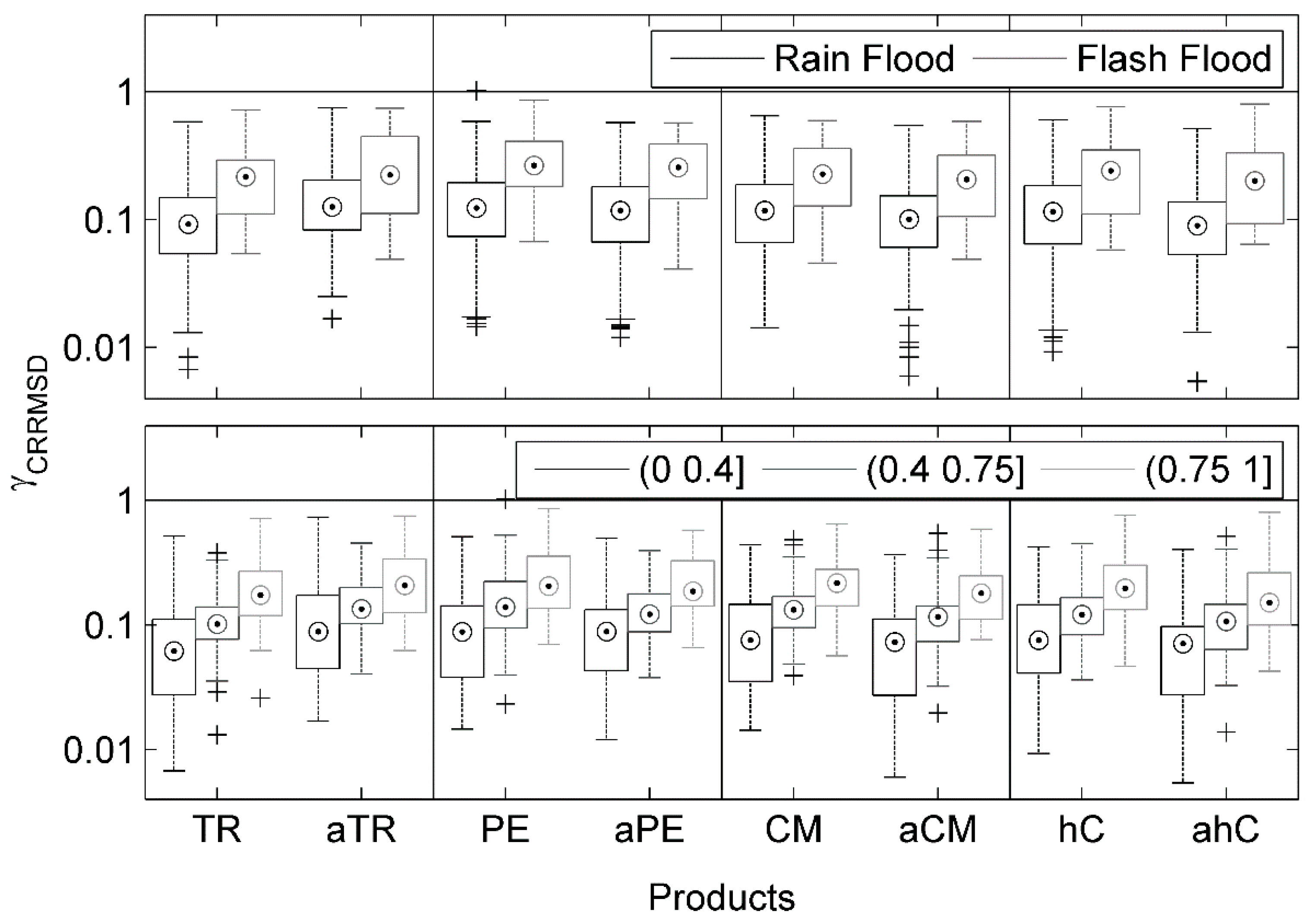
4. Results
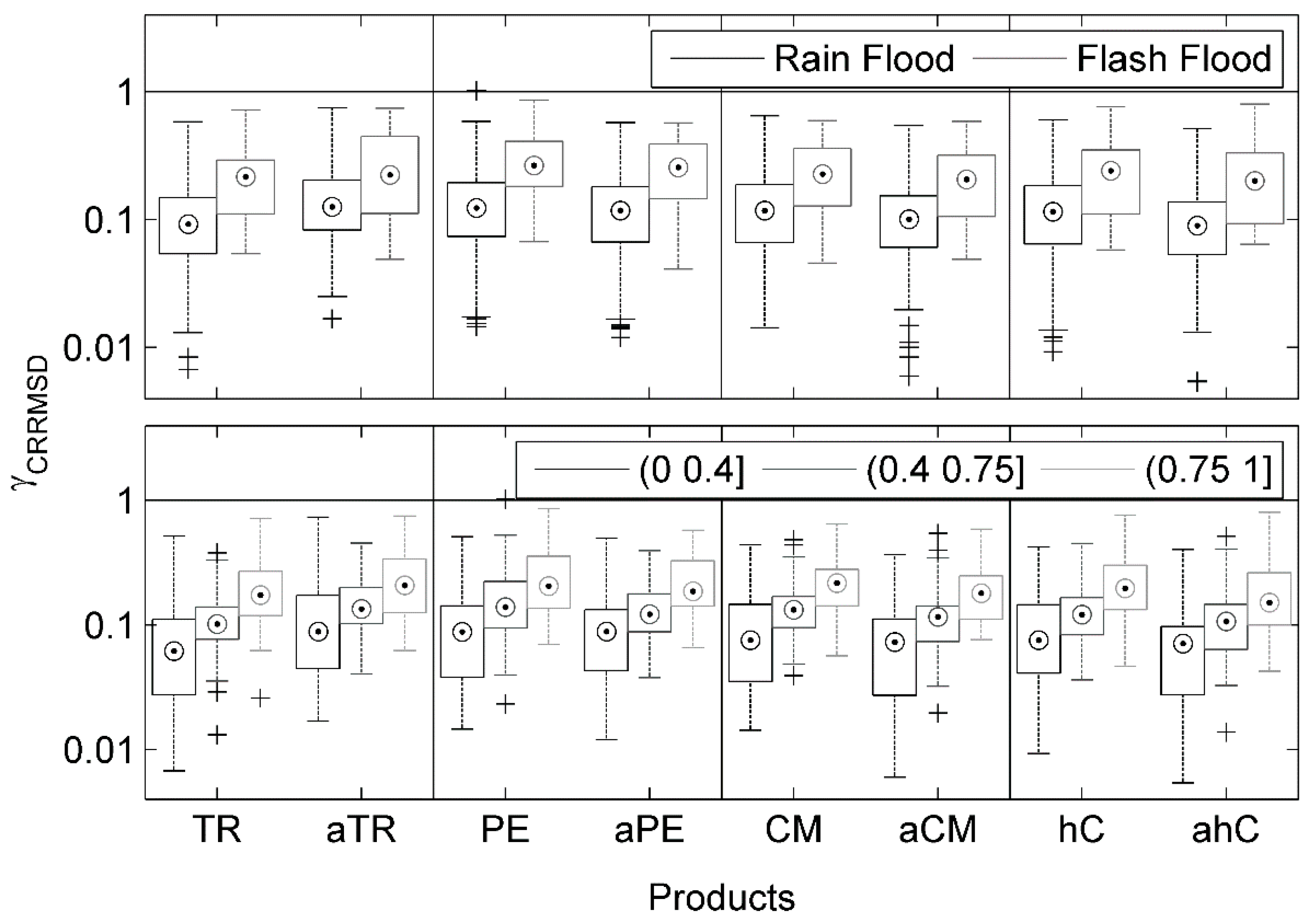
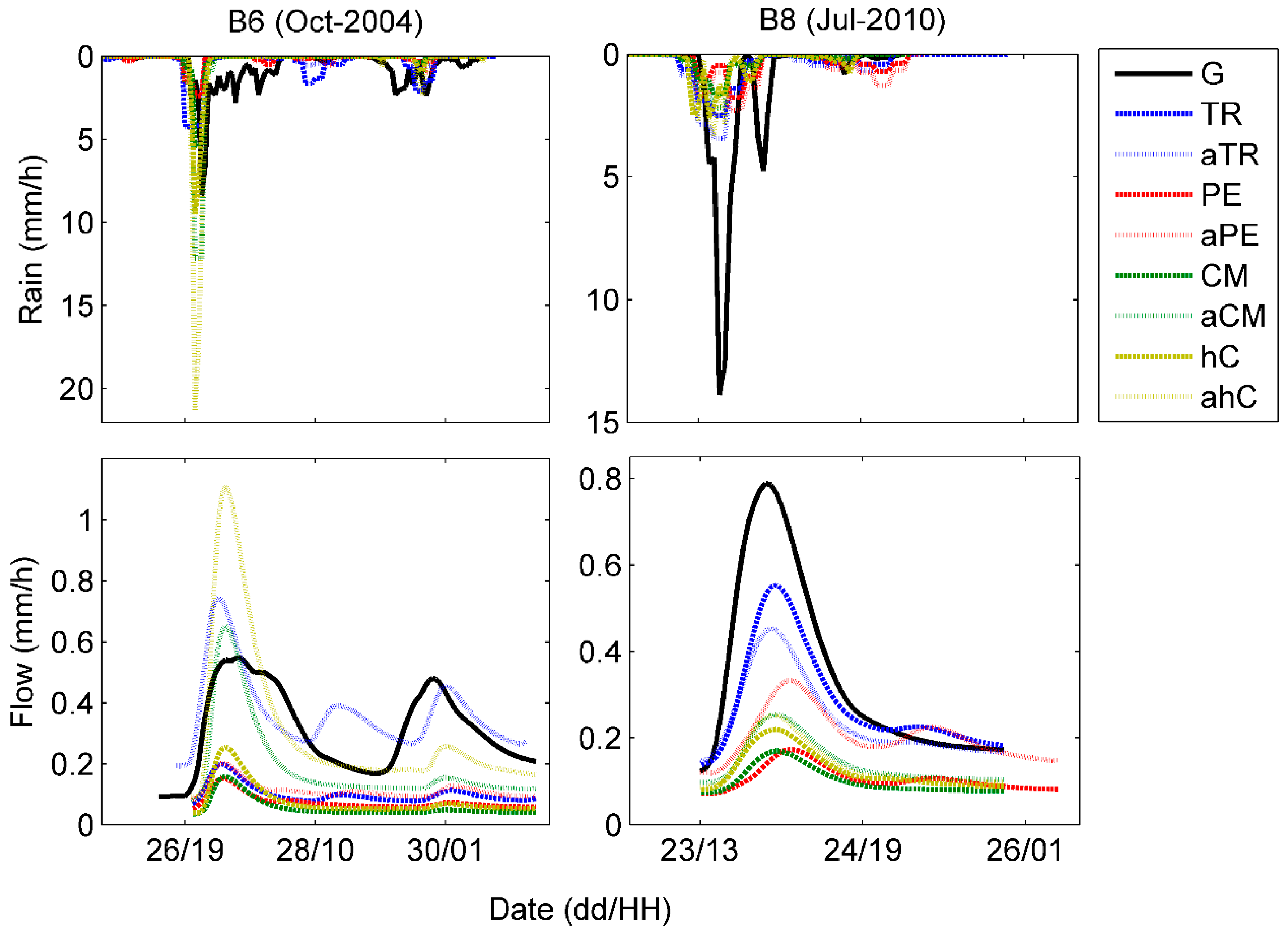
4.1. Event Properties Error Statistics
4.2. Error Propagation
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guetter, A.K.; Georgakakos, K.P.; Tsonis, A.A. Hydrologic applications of satellite data: 2. Flow simulation and soil water estimates. J. Geophys. Res. 1996, 101, 26527–26538. [Google Scholar] [CrossRef]
- Hossain, F.; Anagnostou, E.N. Assessment of current passive-microwave- and infrared-based satellite rainfall remote sensing for flood prediction. J. Geophys. Res. 2004, 109. [Google Scholar] [CrossRef]
- Nikolopoulos, E.I.; Anagnostou, E.N.; Hossain, F.; Gebremichael, M.; Borga, M. Understanding the Scale Relationships of Uncertainty Propagation of Satellite Rainfall through a Distributed Hydrologic Model. J. Hydrometeorol. 2010, 11, 520–532. [Google Scholar] [CrossRef]
- Siddique-E-Akbor, A.H.M.; Hossain, F.; Sikder, S.; Shum, C.K.; Tseng, S.; Yi, Y.; Turk, F.J.; Limaye, A. Satellite Precipitation Data–Driven Hydrological Modeling for Water Resources Management in the Ganges, Brahmaputra, and Meghna Basins. Earth Interact. 2014, 18, 1–25. [Google Scholar] [CrossRef]
- Seyyedi, H.; Anagnostou, E.N.; Beighley, E.; McCollum, J. Hydrologic Evaluation of Satellite and Reanalysis Precipitation Datasets over a Mid-Latitude Basin. Atmos. Res. 2015, 164–165, 37–48. [Google Scholar] [CrossRef]
- Arkin, P.A.; Ardanuy, P.E. Estimating Climatic-Scale Precipitation from Space: A Review. J. Clim. 1989, 2, 1229–1238. [Google Scholar] [CrossRef]
- Kidd, C.; Kniveton, D.R.; Todd, M.C.; Bellerby, T.J. Satellite Rainfall Estimation Using Combined Passive Microwave and Infrared Algorithms. J. Hydrometeorol. 2003, 4, 1088–1104. [Google Scholar] [CrossRef]
- Anagnostou, E.N.; Maggioni, V.; Nikolopoulos, E.I.; Meskele, T.; Hossain, F.; Papadopoulos, A. Benchmarking High-Resolution Global Satellite Rainfall Products to Radar and Rain-Gauge Rainfall Estimates. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1667–1683. [Google Scholar] [CrossRef]
- Maggioni, V.; Vergara, H.J.; Anagnostou, E.N.; Gourley, J.J.; Hong, Y.; Stampoulis, D. Investigating the Applicability of Error Correction Ensembles of Satellite Rainfall Products in River Flow Simulations. J. Hydrometeorol. 2013, 14, 1194–1211. [Google Scholar] [CrossRef]
- Vergara, H.J.; Hong, Y.; Gourley, J.J.; Anagnostou, E.N.; Maggioni, V.; Stampoulis, D.; Kirstetter, P.-E. Effects of Resolution of Satellite-Based Rainfall Estimates on Hydrologic Modeling Skill at Different Scales. J. Hydrometeorol. 2013, 15, 593–613. [Google Scholar] [CrossRef]
- Mei, Y.; Nikolopoulos, E.I.; Anagnostou, E.N.; Borga, M. Evaluating Satellite Precipitation Error Propagation in Runoff Simulations of Mountainous Basins. J. Hydrometeorol. 2015. In press. [Google Scholar] [CrossRef]
- Yong, B.; Ren, L.-L.; Hong, Y.; Wang, J.-H.; Gourley, J.J.; Jiang, S.-H.; Chen, X.; Wang, W. Hydrologic evaluation of Multisatellite Precipitation Analysis standard precipitation products in basins beyond its inclined latitude band: A case study in Laohahe basin, China. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Yong, B.; Hong, Y.; Ren, L.-L.; Gourley, J.J.; Huffman, G.J.; Chen, X.; Wang, W.; Khan, S.I. Assessment of evolving TRMM-based multisatellite real-time precipitation estimation methods andtheir impacts on hydrologic prediction in a high latitude basin. J. Geophys. Res. 2012, 117. [Google Scholar] [CrossRef]
- Wu, H.; Adler, R.F.; Hong, Y.; Tian, Y.; Policelli, F. Evaluation of Global Flood Detection Using Satellite-Based Rainfall and a Hydrologic Model. J. Hydrometeorol. 2012, 13, 1268–1284. [Google Scholar] [CrossRef]
- Nikolopoulos, E.I.; Anagnostou, E.N.; Borga, M. Using High-resolution Satellite Rainfall Products to Simulate a Major Flash Flood Event in Northern Italy. J. Hydrometeorol. 2013, 14, 171–185. [Google Scholar] [CrossRef]
- Mei, Y.; Nikolopoulos, E.I.; Anagnostou, E.N.; Borga, M. Error Analysis of Satellite Rainfall Products in Mountainous Basins. J. Hydrometeorol. 2014, 15, 1778–1789. [Google Scholar] [CrossRef]
- Yong, B.; Liu, D.; Gourley, J.J.; Tian, Y.; Huffman, G.J.; Ren, L.-L.; Hong, Y. Global view of real-time TRMM Multi-satellite Precipitation Analysis: Implication to its successor Global Precipitation Measurement mission. Bull. Am. Meteor. Soc. 2014, 96, 283–296. [Google Scholar] [CrossRef]
- Yilmaz, K.K.; Adler, R.F.; Tian, Y.; Hong, Y.; Pierce, H.F. Evaluation of a satellite-based global flood monitoring system. Int. J. Remote Sens. 2010, 31, 3763–3782. [Google Scholar] [CrossRef]
- Zoccatelli, D.; Parajka, J.; Gaál, L.; Blöschl, G.; Borga, M. A process flood typology along an Alpine transect: analysis based on observations and modelling approaches. J. Hydrol. 2016. Submitted. [Google Scholar]
- Parajka, J.; Kohnová, S.; Bálint, G.; Marbuc, M.; Borga, M.; Claps, P.; Cheval, S.; Dumitrescu, A.; Gaume, É.; Hlavčová, K.; et al. Seasonal characteristics of flood regimes across the Alpine–Carpathian range. J. Hydrol. 2010, 394, 78–89. [Google Scholar] [CrossRef] [PubMed]
- Norbiato, D.; Borga, M.; Merz, R.; Blöschl, G.; Carton, A. Controls on event runoff coefficients in the eastern Italian Alps. J. Hydrol. 2009, 375, 312–325. [Google Scholar] [CrossRef]
- Frei, C.; Schär, C. A precipitation climatology of the Alps from high-resolution rain-gauge observations. Int. J. Climatol. 1998, 18, 873–900. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-Global, Multiyear, Combined-Sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Huffman, G.J.; Adler, R.F.; Bolvin, D.T.; Nelkin, E.J. The TRMM Multi-Satellite Precipitation Analysis (TMPA). In Satellite Rainfall Applications for Surface Hydrology; Gebremichael, M., Hossain, F., Eds.; Springer Netherlands: Dordrecht, The Netherlands, 2010; pp. 3–22. [Google Scholar]
- Sorooshian, S.; Hsu, K.-L.; Gao, X.; Gupta, H.V.; Iman, B.; Braithwaite, D. Evaluation of PERSIANN System Satellite–Based Estimates of Tropical Rainfall. Bull. Am. Meteor. Soc. 2000, 81, 2035–2046. [Google Scholar] [CrossRef]
- Adler, R.F.; Huffman, G.J.; Chang, A.; Ferraro, R.; Xie, P.-P.; Janowiak, J.; Rudolf, B.; Schneider, U.; Curtis, S.; Bolvin, D.; et al. The Version-2 Global Precipitation Climatology Project (GPCP) Monthly Precipitation Analysis (1979–Present). J. Hydrometeorol. 2003, 4, 1147–1167. [Google Scholar] [CrossRef]
- Huffman, G.J.; Adler, R.F.; Bolvin, D.T.; Gu, G. Improving the global precipitation record: GPCP Version 2.1. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A Method that Produces Global Precipitation Estimates from Passive Microwave and Infrared Data at High Spatial and Temporal Resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Xie, P.; Yoo, S.-H.; Joyce, R.J.; Yarosh, Y. Bias-Corrected CMORPH: A 13-Year Analysis of High-Resolution Global Precipitation. In Proceedings of the 2011 EGU General Assembly, Vienna, Austria, 4–8 April 2011.
- Joyce, R.J.; Xie, P. Kalman Filter–Based CMORPH. J. Hydrometeorol. 2011, 12, 1547–1563. [Google Scholar] [CrossRef]
- Moore, R.J. The PDM rainfall-runoff model. Hydrol. Earth Syst. Sci. 2007, 11, 483–499. [Google Scholar] [CrossRef]
- Moore, R.J. The probability-distributed principle and runoff production at point and basin scales. Hydrol. Sci. J. 1985, 30, 273–297. [Google Scholar] [CrossRef]
- Cazorzi, F.; Dalla Fontana, G. Snowmelt modelling by combining air temperature and a distributed radiation index. J. Hydrol. 1996, 181, 169–187. [Google Scholar] [CrossRef]
- Hargreaves, G.H.; Samani, Z.A. Estimating potential evapotranspiration. J. Irr. Drain. Div. 1982, 108, 225–230. [Google Scholar]
- Cunge, J.A. On The Subject of A Flood Propagation Computation Method (Musklngum Method). J. Hydraul. Res. 1969, 7, 205–230. [Google Scholar] [CrossRef]
- Norbiato, D.; Borga, M.; Dinale, R. Flash flood warning in ungauged basins by use of the flash flood guidance and model-based runoff thresholds. Met. Apps. 2009, 16, 65–75. [Google Scholar] [CrossRef]
- Borga, M.; Nikolopoulos, E.I.; Zoccatelli, D.; Marra, F. Extension of Adige River Flood Forecasting System for Debris Flow Forecasting, Simulation of Glacial Hydrology and Artificial Reservoir Storage Accounting. University of Padova. 2014. Available online: http://webcache.googleusercontent.com/search?q=cache:ZDL1lB2SSv0J:www.provinz.bz.it/zivilschutz/service/veroeffentlichungen.asp%3Fsomepubl_action%3D300%26somepubl_image_id%3D349342+&cd=1&hl=it&ct=clnk&gl=it (accessed on 9 January 2016).
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Merz, R.; Blöschl, G. A process typology of regional floods. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Mei, Y.; Anagnostou, E.N. A Hydrograph Separation Method Based on Information from Rainfall and Runoff Records. J. Hydrol. 2015, 523, 636–649. [Google Scholar] [CrossRef]
- Taylor, K.E. Summarizing multiple aspects of model performance in a single diagram. J. Geophys. Res. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Viglione, A.; Chirico, G.B.; Komma, J.; Woods, R.; Borga, M.; Blöschl, G. Quantifying space-time dynamics of flood event types. J. Hydrol. 2010, 394, 213–229. [Google Scholar] [CrossRef]
- Mei, Y.; Anagnostou, E.N.; Stampoulis, D.; Nikolopoulos, E.I.; Borga, M.; Vegara, H.J. Rainfall Organization Control on the Flood Response of Mild-slope Basins. J. Hydrol. 2014, 510, 565–577. [Google Scholar] [CrossRef]
- Skøien, J.O.; Blöschl, G.; Western, A.W. Characteristic space scales and timescales in hydrology. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Skøien, J.O.; Blöschl, G. Catchments as space-time filters—A joint spatio-temporal geostatistical analysis of runoff and precipitation. Hydrol. Earth Syst. Sci. 2006, 10, 645–662. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Sub-Basin Name | Area (km2) | Mean of Elevation (m a.s.l.) | NSI ● |
|---|---|---|---|---|
| 1 | Rienza at Monguelfo | 269 | 2401 | 0.61 |
| 2 | Aurino at Cadipietra | 150 | 2165 | 0.78 |
| 3 | Gadera at Mantana | 397 | 1956 | 0.42 |
| 4 | Rio Casies at Colle | 117 | 2038 | 0.70 |
| 5 | Anterselva at Bagni di Salomone | 82 | 1899 | 0.75 |
| 6 | Ridanna at Vipiteno | 210 | 1852 | 0.81 |
| 7 | Plan at Plan | 49 | 1858 | 0.66 |
| 8 | Aurino at San Giorgio | 608 | 2035 | 0.86 |
| 9 | San Vigilio at Longega | 105 | 1846 | 0.37 |
| Number of Event | Event Type | Time Series | Mean and Range of Event Properties | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Duration (h) | Depth (mm) | SD ● (mm/h) | Initial Soil Moisture (% Saturation) | Runoff Coefficient (%) | ||||||||
| 116 | Rain Flood | Rainfall | 45 | [9–134] | 47 | [7–99] | 1.8 | [0.4–4.7] | 57 | [23–92] | 22 | [12–34] |
| Runoff | 104 | [34–281] | 23 | [3–80] | 0.1 | [0.0–0.6] | ||||||
| 12 | Flash Flood | Rainfall | 32 | [10–69] | 54 | [20–106] | 2.4 | [1.3–5.1] | 58 | [36–80] | 35 | [18–44] |
| Runoff | 62 | [31–123] | 32 | [6–69] | 0.3 | [0.1–0.5] | ||||||
| Products | Cumulative Depth | Centroid | Peakedness | Peak Flow | CC ● | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rainfall | Flood | CC | Rainfall | Flood | CC | Rainfall | Flood | CC | |||
| TR | 0.22 | −0.03 | 0.53 | 0.60 | 0.00 | 0.15 | 0.86 | 0.19 | 0.35 | −0.12 | 0.62 |
| aTR | 0.00 | −0.02 | −0.03 | 0.60 | 0.52 | −0.05 | 0.81 | −0.01 | 0.12 | −0.28 | 0.48 |
| PE | −0.20 | 0.40 | 0.08 | 0.11 | −0.04 | 0.10 | 0.49 | −0.18 | 0.25 | −0.28 | 0.86 |
| aPE | −0.12 | −0.30 | 0.29 | 0.08 | −0.24 | 0.31 | 0.42 | −0.04 | −0.02 | −0.01 | 0.68 |
| CM | −0.45 | −0.17 | 0.11 | 0.44 | −0.21 | 0.07 | 0.48 | −0.07 | −0.30 | 0.13 | 0.05 |
| aCM | −0.21 | −0.46 | 0.44 | 0.44 | −0.62 | 0.18 | 0.49 | −0.36 | −0.14 | −0.02 | 0.06 |
| hC | −0.45 | 0.12 | 0.01 | 0.16 | −0.21 | 0.15 | 0.26 | −0.34 | −0.16 | −0.47 | 0.73 |
| ahC | −0.22 | −0.03 | 0.09 | 0.14 | 0.13 | −0.23 | 0.23 | −0.44 | 0.02 | −0.04 | 0.16 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, Y.; Nikolopoulos, E.I.; Anagnostou, E.N.; Zoccatelli, D.; Borga, M. Error Analysis of Satellite Precipitation-Driven Modeling of Flood Events in Complex Alpine Terrain. Remote Sens. 2016, 8, 293. https://doi.org/10.3390/rs8040293
Mei Y, Nikolopoulos EI, Anagnostou EN, Zoccatelli D, Borga M. Error Analysis of Satellite Precipitation-Driven Modeling of Flood Events in Complex Alpine Terrain. Remote Sensing. 2016; 8(4):293. https://doi.org/10.3390/rs8040293
Chicago/Turabian StyleMei, Yiwen, Efthymios I. Nikolopoulos, Emmanouil N. Anagnostou, Davide Zoccatelli, and Marco Borga. 2016. "Error Analysis of Satellite Precipitation-Driven Modeling of Flood Events in Complex Alpine Terrain" Remote Sensing 8, no. 4: 293. https://doi.org/10.3390/rs8040293
APA StyleMei, Y., Nikolopoulos, E. I., Anagnostou, E. N., Zoccatelli, D., & Borga, M. (2016). Error Analysis of Satellite Precipitation-Driven Modeling of Flood Events in Complex Alpine Terrain. Remote Sensing, 8(4), 293. https://doi.org/10.3390/rs8040293