3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field


Abstract
:1. Introduction
2. Materials and Methods
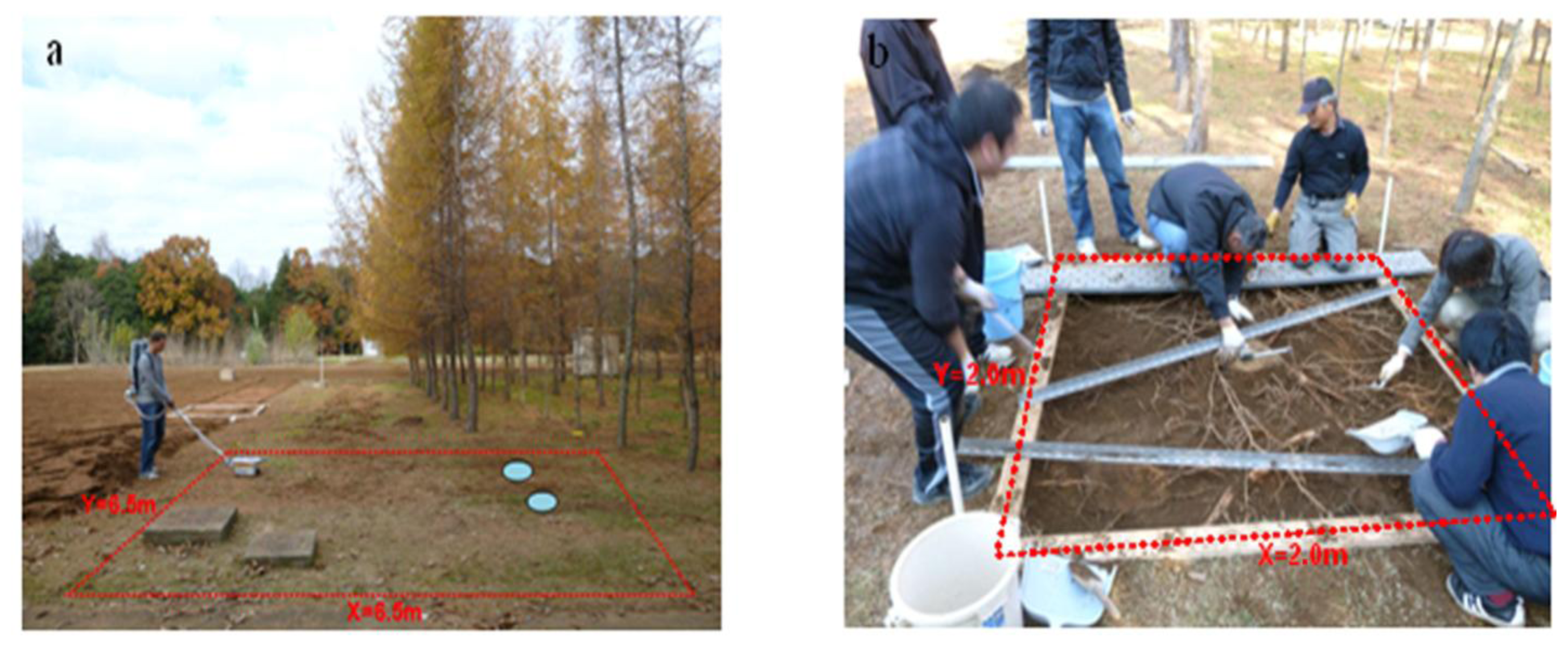
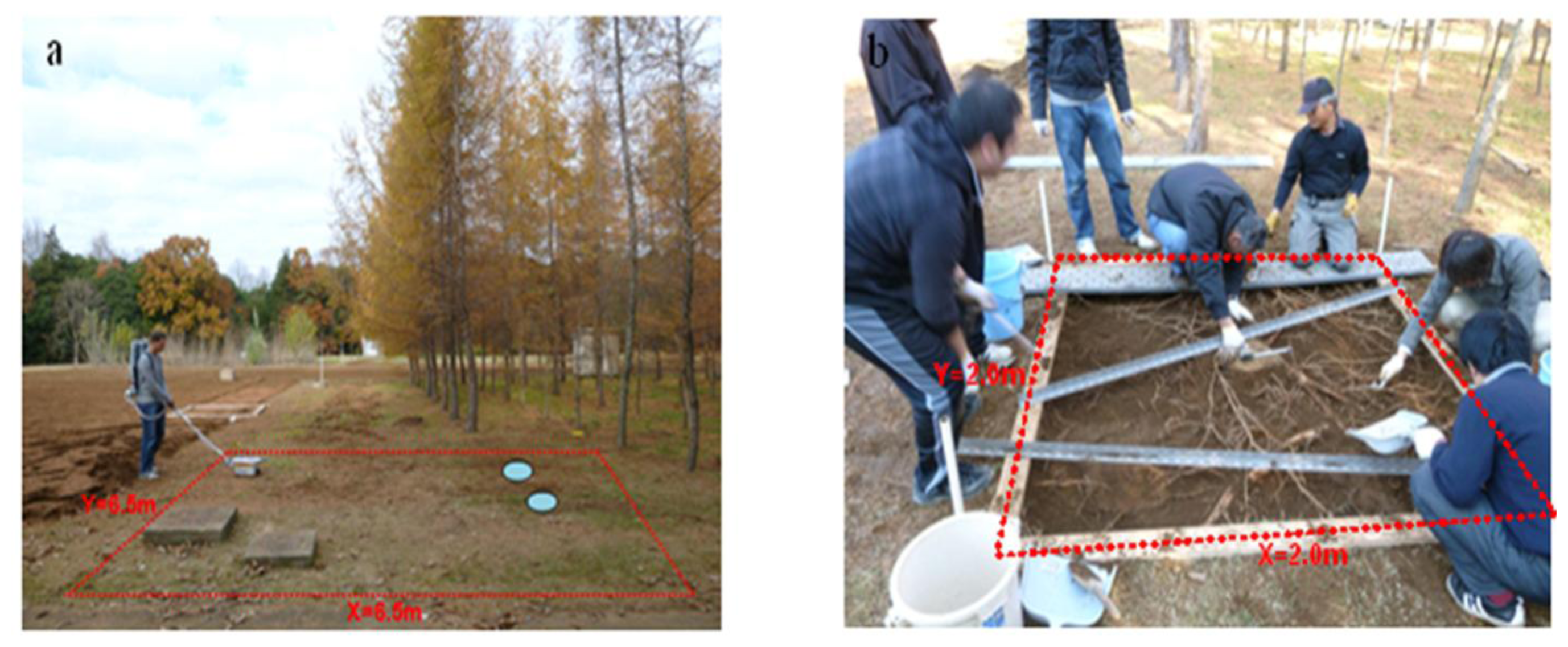
2.1. Survey Site
2.2. Data Acquisition by 3D GPR
2.3. Data Preprocessing
- (a)
- Regularization, which should interpolate the acquired traces (A-scans) into a regular grid using the nearest neighbor interpolation according to their accurately positioning information, finally outputs a 3D data cube;
- (b)
- Zero time correction, set the arrival time of the reflection from ground surface as time zero, which is an important step for migration and root localization;
- (c)
- Background removal, removed the strong direct wave and the coupling, and made the reflection from tree roots more obvious;
- (d)
- Band-pass filtering, set fL and fH in Table 1 as the passband limit for removing the direct current offset and suppressing high-frequency noise.
- (e)
- Attenuation compensation. Energy attenuation could result in the reflected amplitude decreasing rapidly, especially in this wet soil. It was very difficult to fit an attenuation curve of propagation in the field conditions. Although it is impossible to compensate for the amplitude attenuation accurately, automatic gain control (AGC) was still a practical method to be used in this measurement. The length of the sliding window, an important parameter of AGC, was set to a quarter of the sampling number.
- (f)
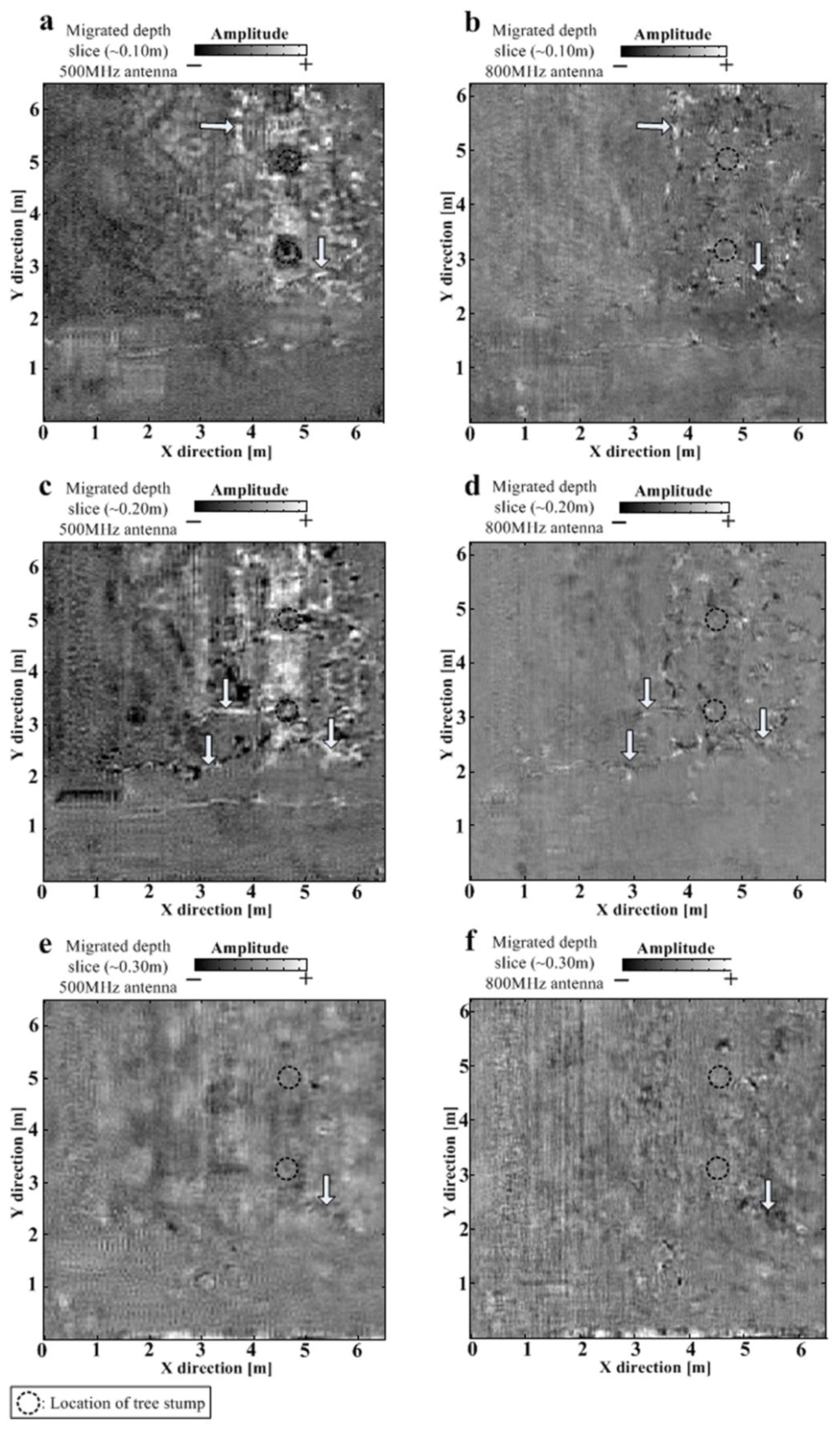
- 3D migration, employed the F-K migration method to focus the reflections from the targets to the correct position beneath the surface. Wave velocity of propagation in the soil approximated to 0.071 m/ns, according to the relative permittivity measured by TDR, under the assumption that it was nearly constant in the shallow subsurface of soil.
- (g)
- Hilbert transform, generated the magnitude information instead of their amplitude after 3D migration, which was a necessary step for root detection and indexes extraction from the profiles.
2.4. Root Detection Procedure in 3D Data Cube
- (a)
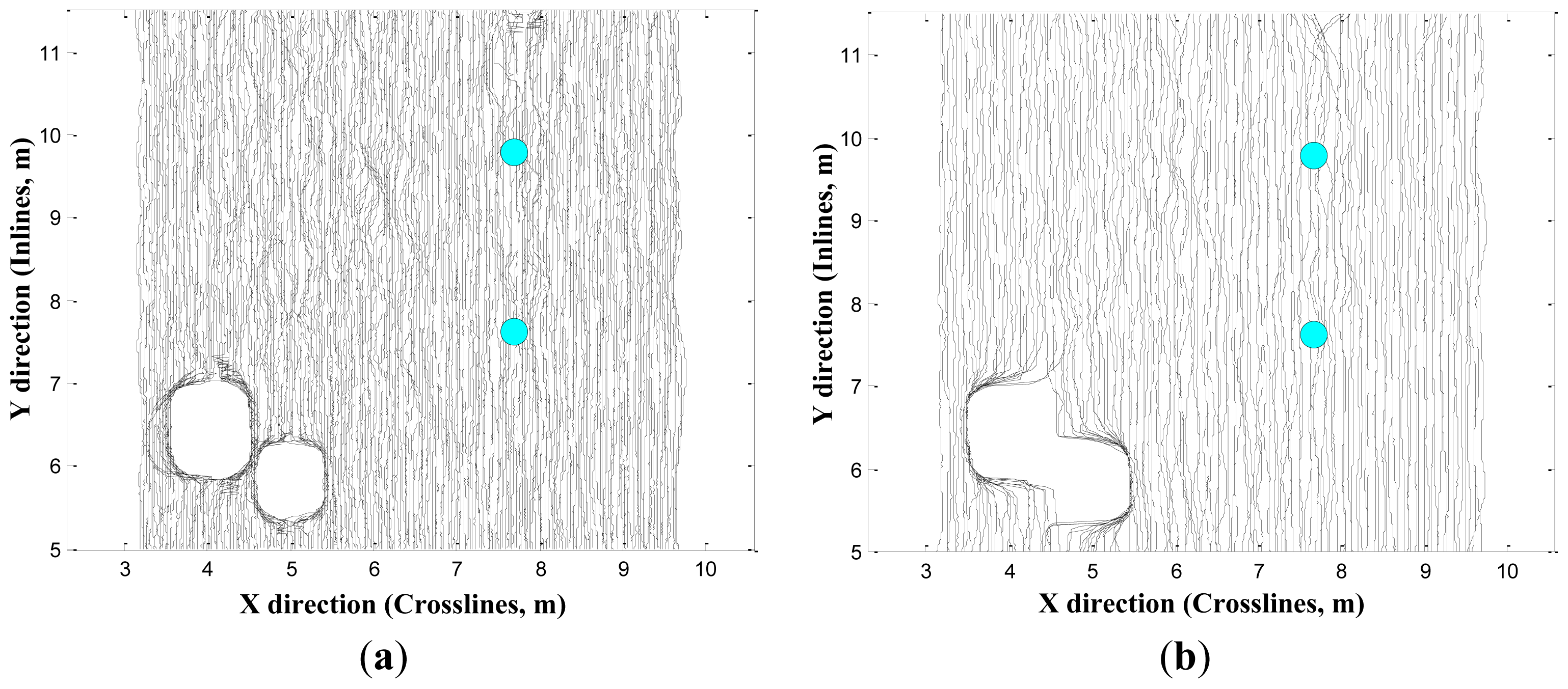
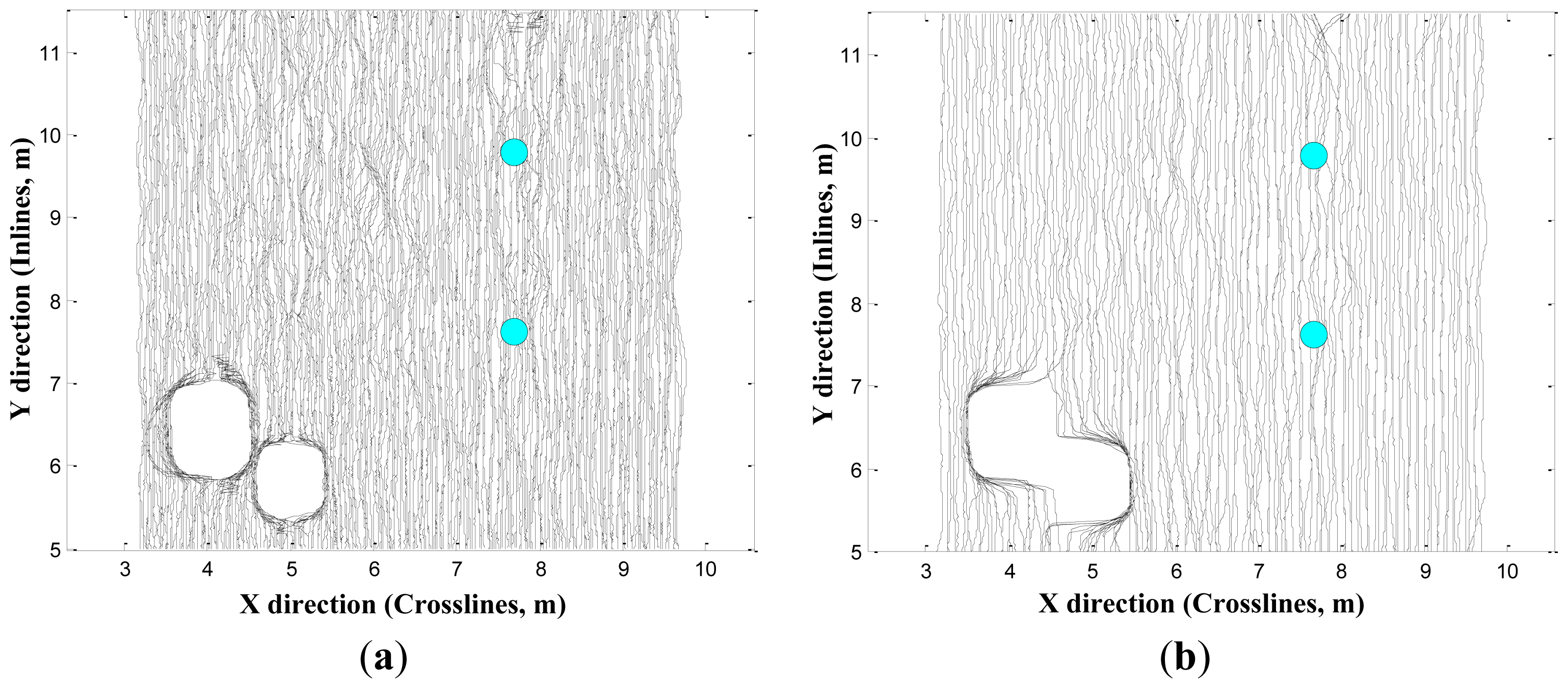
- Firstly, it is necessary to find the location of the tree stump in the migrated data cube, which can be expressed by Is = {Im,n,k|Im,n,k ∈ I, m1 ≤ m ≤ m2, n1 ≤ n ≤ n2, 1 ≤ k ≤ K}, where [m1, m2] and [n1, n2] define the area of stump. Here, one specific value Th1 is set as the global threshold for root detection. Based on threshold detection theory, pixels in Is whose intensity are more than Th1 will be treated as root candidates. The detection result B, related to the whole data cube, could be predefined as:Then, four marginal vertical profiles are extracted from Is: S1 = {Im,n,k|Im,n,k ∈ Is, m = m2}, S2 = {Im,n,k|Im,n,k ∈ Is, m = m1}, S3 = {Im,n,k|Im,n,k ∈ Is, n = n1}, and S4 = {Im,n,k|Im,n,k ∈ Is, n = n2}. According to this setup, the searching procedure will start from these four extracted profiles and proceed in the east, west, south, and north directions in the 3D data cube I. The Y direction in the measurement is defined as north.
- (b)
- The searching procedure is iterative and each root candidate in four profiles will become the start position of an iteration. For example, if the start position locates at (m2, n, k) in S1 and its corresponding Bm2,n,k = 1 in B, the searching procedure will start from the current pixel Im2,n,k and go east. For the current pixel Im2,n,k, there are five potential searching directions in its 6-connected neighborhood {Im2,n,k}N6 which include Im2+1,n,k, Im2,n−1,k, Im2,n+1,k, Im2,n,k−1, Im2,n,k+1, and excludes Im2−1,n,k, which is opposite to the search direction. Here, there is an assumption that the value of the pixel along the root is the maximum in its connected neighbourhood. Based on this, if the maximum value max [{Im2,n,k}N6] among these five potential pixels is more than Th1, the next search position will be determined towards the maximum value. In order to keep the search stable and effective, the values of {Im2,n,k}N6 are commonly obtained by the means in their 6-connected neighbourhood.
- (c)
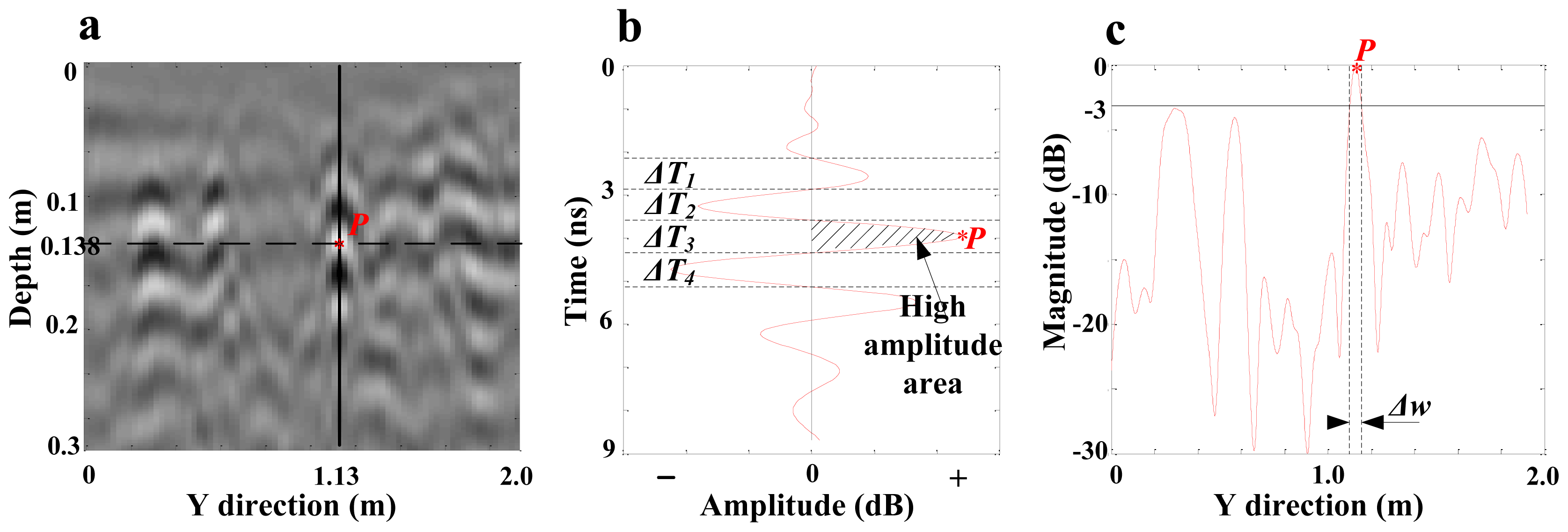
- After determining the searching direction, the tree root candidate pixels need to be detected in the 26-connected neighbourhood {Im2,n,k}N26 of the current pixel. It is assumed that the profile of a root in GPR data is made up of several pixels, where the size of one pixel only represents Δx × Δy × Δz (length × width × depth). Therefore, based on the intensity of the current pixel Im2,n,k, any pixels in {Im2,n,k}N26 whose intensities are more than 0.707Im2,n,k (−3 dB) will be detected as root candidates, and their corresponding positions in detection result B will be set to 1.
- (d)
- In case there are several weak reflections, resulting from the local sparse spatial sampling, a lower threshold Th2 (Th2 < Th1) is introduced in the searching procedure. If Th1 is the only threshold, it is inevitable that the detected root will be cracked. Here, there is an assumption that the section with weak intensity is local and infrequent. Therefore, when max [{Im2,n,k}N6] is less than Th1, it is necessary to enlarge the search range two or three pixels forward along the searching direction. Then, if one pixel with an intensity of more than Th1 can be found, the search will continue. Otherwise, the current searching process will end, and another search will restart from the next candidate position (m2, n+1, k) in S1 whose corresponding value in B is 1. It is a special case that detection of the weak reflection is based on Th2, thus, the cracked sections in the detection result will be connected.
- (e)
- Steps b–d will repeat until the searching end condition has been met or the current position reaches the boundary of the data cube. Then, another searching process will restart from the next candidate position in S1 whose corresponding value in B is 1. When all search processes starting from S1 to S4 are complete, the 3D searching procedure will terminate.
2.5. Indexes Extraction from GPR Data for Biomass Estimation
2.6. Construction of Biomass Estimation Models
3. Results and Discussion
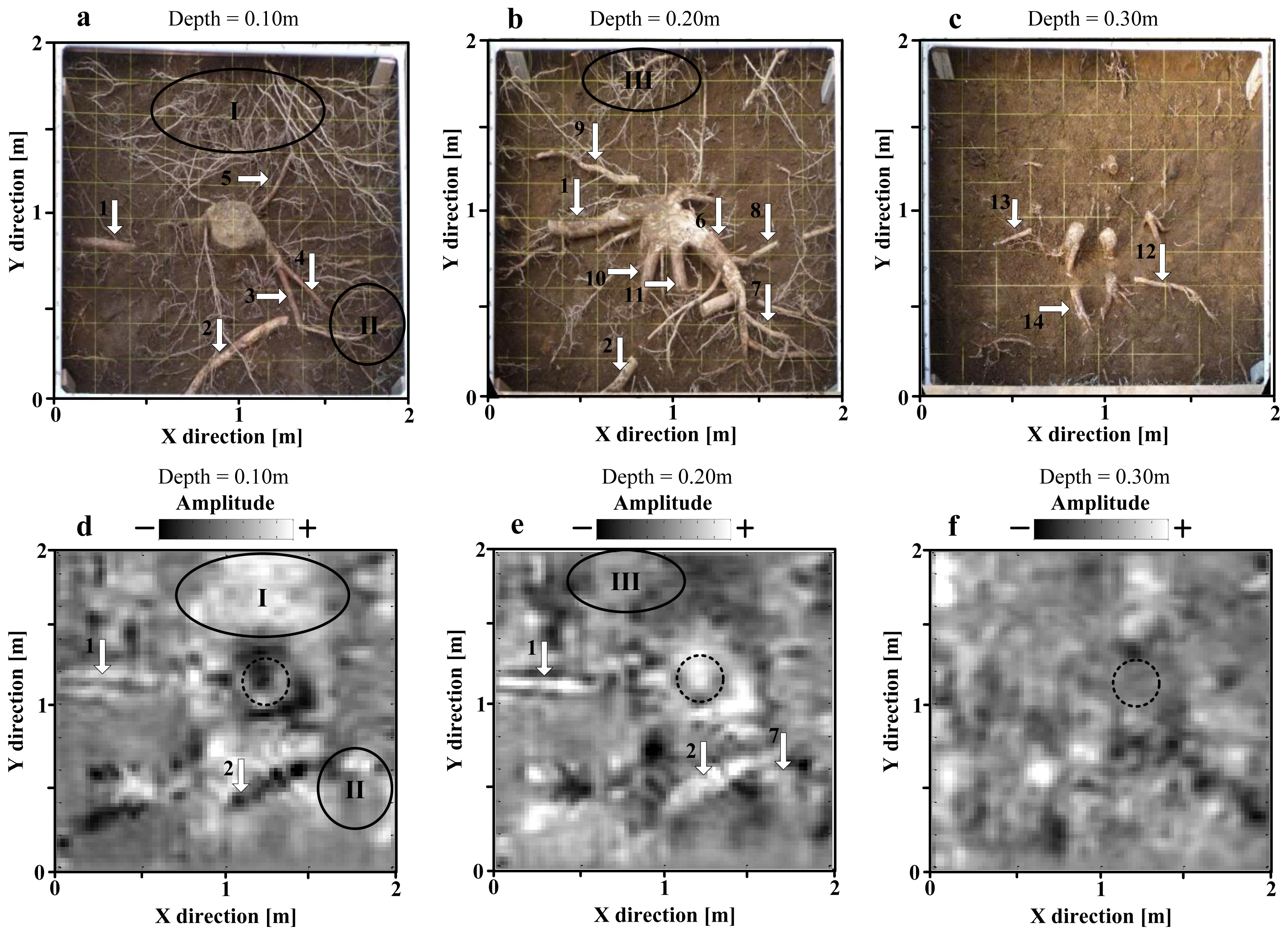
3.1. 3D Migrated Results of GPR Data Cube
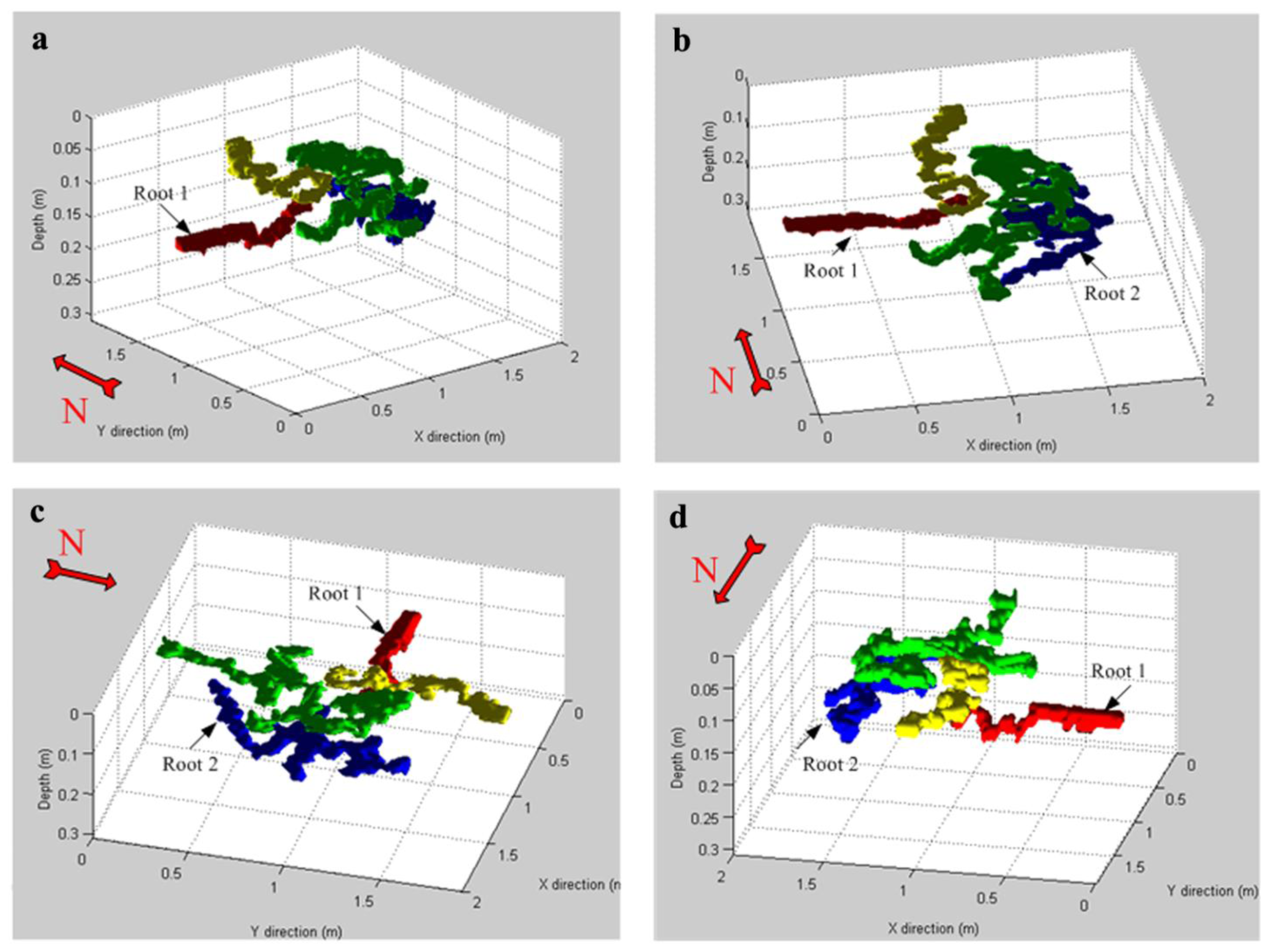
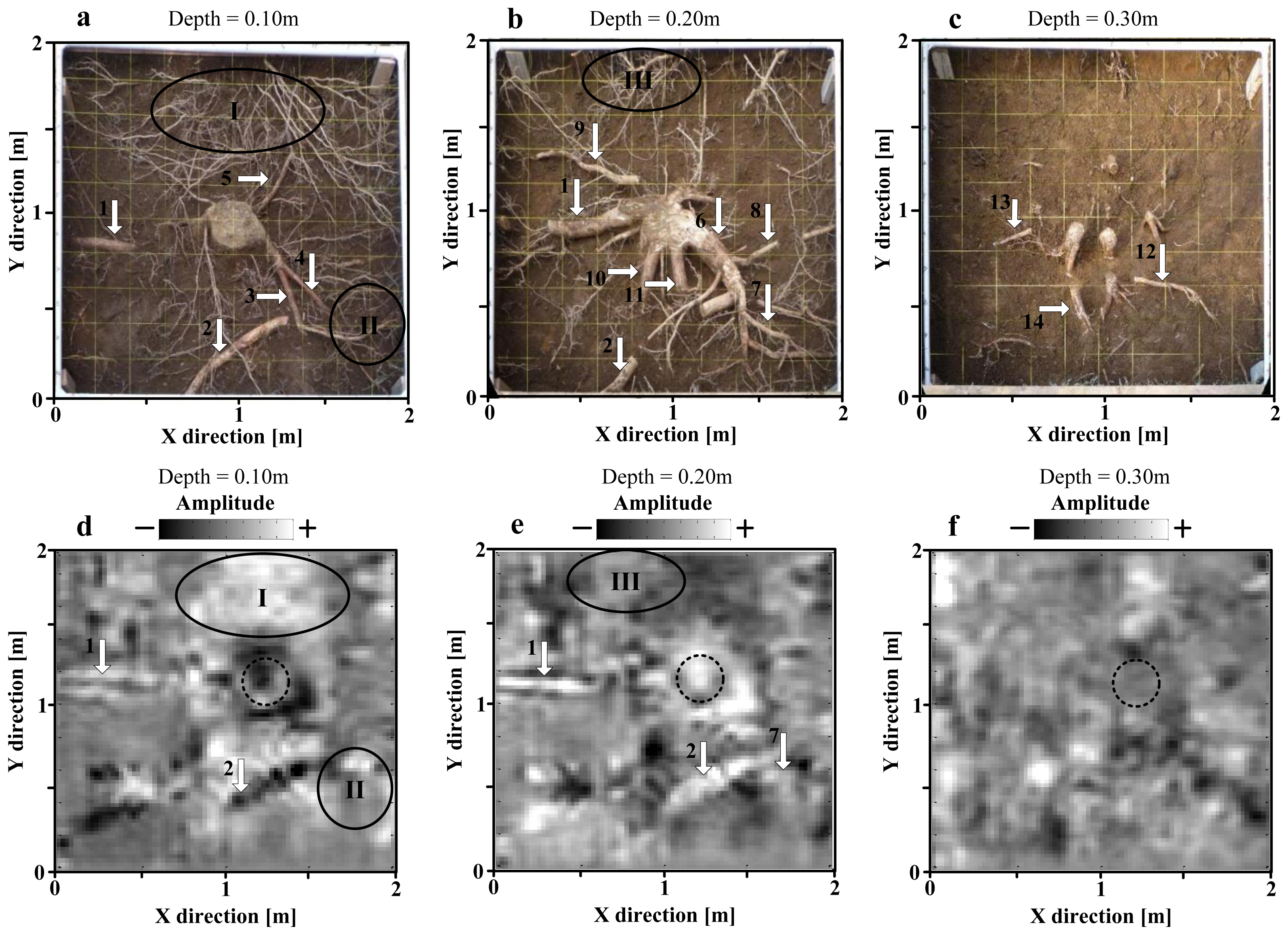
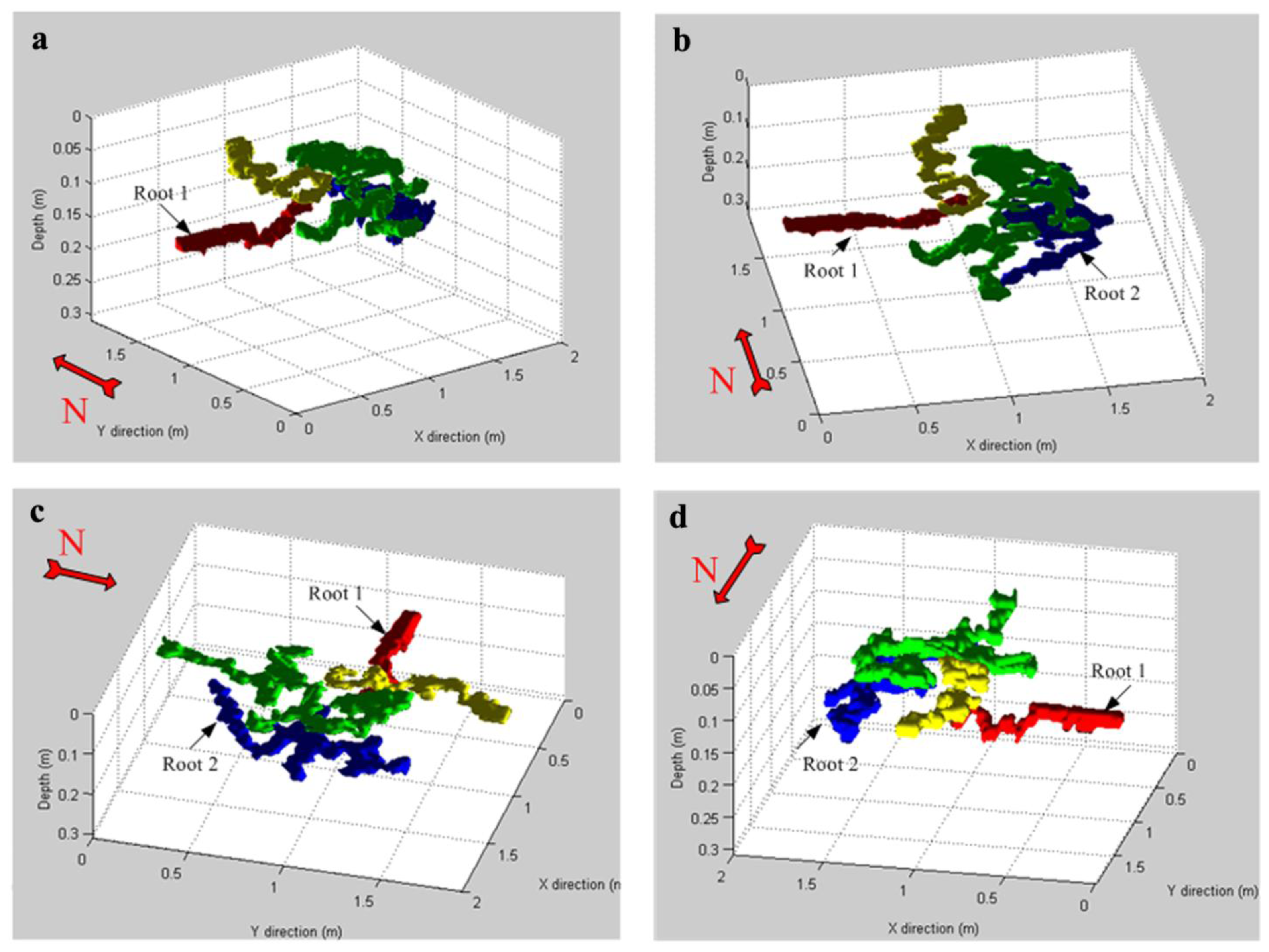
3.2. Detection Result of Coarse Roots in 3D Data Cube
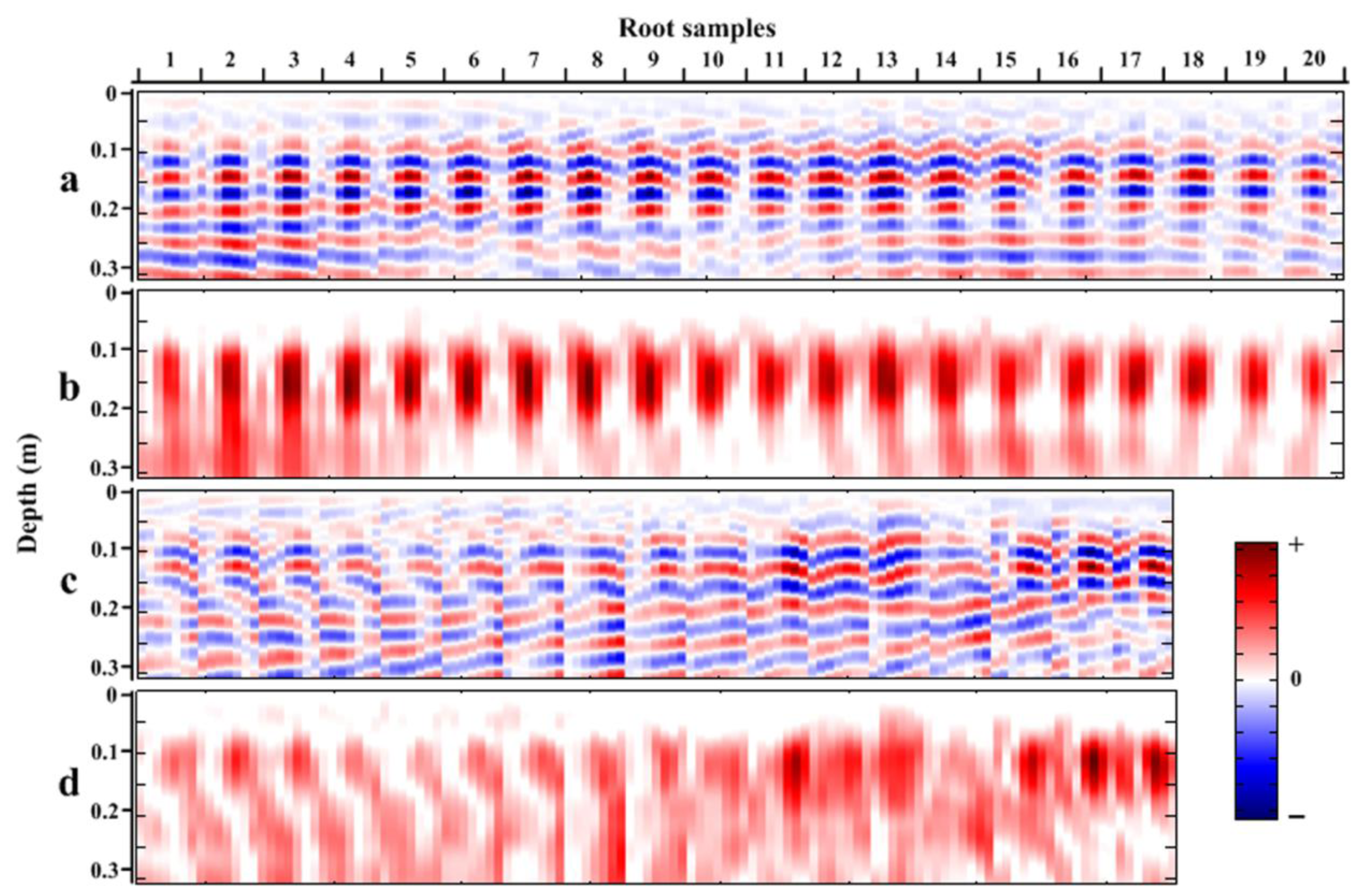
3.3. Root Biomass Estimation from GPR Data
3.4. Root Diameter Estimation from GPR Data
4. Conclusions
Acknowledgments
Conflicts of Interest
- Author ContributionsAll authors contributed extensively to the work presented in the manuscript. Shiping Zhu analyzed the data, proposed the algorithm and wrote the paper. Chunlin Huang contributed on data analysis and provided useful suggestions. Yi Su participated in organizing the paper and helps to polish the language. Motoyuki Sato contributed much on experimental design, data collection and language correction.
References
- Daniels, D.J. Ground Penetrating Radar, 2nd ed; Institution of Engineering and Technology: London, UK, 2004. [Google Scholar]
- Harry, M.J. Ground Penetrating Radar: Theory and Application, 1st ed; Elsevier Science: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Sato, M.; Yokota, Y.; Takahashi, K.; Grasmueck, M. Landmine detection by 3DGPR system. Proc. SPIE 2012, 8357, 23–27. [Google Scholar]
- Youn, H.; Chen, C. Neural Detection for Buried Pipes Using Fully-Polarimetric Ground Penetrating Radar System. Proceedings of the 10th International Conference on Ground Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 231–234.
- Hruska, J.; Cermák, J.; Sustek, S. Mapping tree root systems with ground-penetrating radar. Tree Physiol 1999, 19, 125–130. [Google Scholar]
- Moran, C.J.; Pierret, A.; Stevenson, A.W. X-ray absorption and phase contrast imaging to study the interplay between plant roots and soil structure. Plant Soil 2000, 223, 99–115. [Google Scholar]
- Butnor, J.R.; Johnsen, K.H.; Wikström, P.; Lundmark, T.; Linder, S. Imaging Tree Roots with Borehole Radar. Proceedings of the 11th International Conference on Ground Penetrating Radar, Columbus, OH, USA, 19–22 June 2006; pp. 1–8.
- Amato, M.; Basso, B.; Celano, G.; Bitella, G.; Morelli, G.; Rossi, R. In situ detection of tree root distribution and biomass by multi-electrode resistivity imaging. Tree Physiol 2008, 28, 1441–1448. [Google Scholar]
- Brunner, I.; Godbold, D.L. Tree roots in a changing world. J. For. Res 2007, 12, 78–82. [Google Scholar]
- Guo, L.; Chen, J.; Cui, X.; Fan, B.; Lin, H. Application of ground penetrating radar for coarse root detection and quantification: A review. Plant Soil 2013, 362, 1–23. [Google Scholar]
- Wielopolski, L.; Hendrey, G.; Daniels, J.; McGuigan, M. Imaging Tree Root Systems in situ. Proceedings of the 8th International Conference on Ground Penetrating Radar, Gold Coast, Australia, 27 April 2000; pp. 642–646.
- Zonone, T.; Morelli, G.; Teobaldelli, M.; Fischanger, F.; Matteucci, M.; Sordini, M.; Armani, A.; Ferre, C.; Chiti, T.; Seufert, G. Preliminary use of ground-penetrating radar and electrical resistivity tomography to study tree roots in pine forests and poplar plantations. Funct. Plant Biol 2008, 35, 1047–1058. [Google Scholar]
- Leucci, G. The use of three geophysical methods for 3D images of total root volume of soil in urban environments. Explor. Geophys 2010, 41, 268–278. [Google Scholar]
- Hirano, Y.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Limiting factors in the detection of tree roots using ground-penetrating radar. Plant Soil 2009, 319, 15–24. [Google Scholar]
- Butnor, J.R.; Doolittle, J.A.; Kress, L.; Cohen, S.; Johnson, K.H. Use of ground-penetrating radar to study tree roots in the southeastern United States. Tree Physiol 2001, 21, 1269–1278. [Google Scholar]
- Butnor, J.R.; Doolittle, J.A.; Johnson, K.H.; Samuelson, L.; Stokes, T.; Kress, L. Utility of ground-penetrating radar as a root biomass survey tool in forest systems. Soil Sci. Soc. Am. J 2003, 67, 1607–1615. [Google Scholar]
- Cui, X.; Guo, L.; Chen, J.; Chen, X.; Zhu, X. Estimating tree-root biomass in different depths using ground-penetrating radar: Evidence from a controlled experiment. IEEE Trans. Geosci. Remote Sens 2013, 51, 3410–3423. [Google Scholar]
- Cui, X.; Chen, J.; Shen, J.; Cao, X.; Chen, X.; Zhu, X. Modelling tree root diameter and biomass by ground-penetrating radar. Sci. China Earth Sci 2011, 54, 711–719. [Google Scholar]
- Dannoura, M.; Hirano, Y.; Igarashi, T.; Ishii, M.; Aono, K.; Yamase, K.; Kanazawa, Y. Detection of Cryptomeria japonica roots with ground penetrating radar. Plant Biosyst 2008, 142, 375–380. [Google Scholar]
- Barton, C.V.M.; Montagu, K.D. Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions. Tree Physiol 2004, 24, 1323–1331. [Google Scholar]
- Hirano, Y.; Yamamoto, R.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Detection frequency of Pinus thunbergii roots by ground-penetrating radar is related to root biomass. Plant Soil 2012, 360, 363–373. [Google Scholar]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Impact of root water content on root biomass estimation using ground penetrating radar: Evidence from forward simulations and field controlled experiments. Plant Soil 2013, 371, 503–520. [Google Scholar]
- Tanikawa, T.; Hirano, Y.; Dannoura, M.; Yamase, K.; Aono, K.; Ishii, M.; Igarashi, T.; Ikeno, H.; Kanazawa, Y. Root orientation can affect detection accuracy of ground-penetrating radar. Plant Soil 2013, 373, 317–327. [Google Scholar]
- Raz-Yaseef, N.; Koteen, L.; Baldocchi, D.D. Coarse root distribution of a semi-arid oak savanna estimated with ground penetrating radar. J. Geophys. Res 2013, 118, 135–147. [Google Scholar]
- Isaac, M.E.; Anglaaere, L.C.N. An in situ approach to detect tree root ecology: Linking ground-penetrating radar imaging to isotope-derived water acquisition zones. Ecol. Evol 2013, 3, 1330–1339. [Google Scholar]
- Isaac, M.E.; Anglaaere, L.C.N.; Borden, K.; Adu-Bredu, S. Intraspecific root plasticity in agroforestry systems across edaphic conditions. Agric. Ecosyst. Environ 2014, 185, 16–23. [Google Scholar]
- Radzevicius, S.J.; Daniels, J.J. Ground penetrating radar polarization and scattering from cylinders. J. Appl. Geophys 2000, 45, 111–125. [Google Scholar]
- Grasmueck, M.; Viggiano, D.A. Integration of ground-penetrating radar and laser position sensors for real-time 3-D data fusion. IEEE Trans. Geosci. Remote Sens 2007, 45, 130–137. [Google Scholar]
- Grasmueck, M.; Weger, R.; Horstmeyer, H. Full-resolution 3D GPR imaging. Geophysics 2005, 70, K12–K19. [Google Scholar]
- Böniger, U.; Tronicke, J. On the potential of kinematic GPR surveying using a self-tracking total station: Evaluating system crosstalk and latency. IEEE Trans. Geosci. Remote Sens 2010, 48, 3792–3798. [Google Scholar]
- Böniger, U.; Tronicke, J. Improving the interpretability of 3D GPR data using target-specific attributes: Application to tomb detection. J. Archaeol. Sci 2010, 37, 672–679. [Google Scholar]
- Yokota, Y.; Matsumoto, M.; Gaber, A.; Grasmueck, M.; Sato, M. Estimation of Biomass of Tree Roots by GPR with High Accuracy Positioning System. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium 2011, Vancouver, BC, Canada, 24–29 July 2011; pp. 190–193.
- Zhu, S.; Su, Y.; Sato, M. Detection of Tree Roots and Root Biomass Estimation based on Ground Penetrating Radar with High Accuracy Positioning System. Proceedings of the IET International Radar Conference, Xi’an, China, 14–16 April 2013; pp. 1–5.
- Bano, M. Modelling of GPR waves for lossy media obeying a complex power law of frequency for dielectric permittivity. Geophys. Prospect 2004, 52, 11–26. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using Matlab, 2nd ed; Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Rial, F.I.; Pereira, M.; Lorenzo, H.; Arias, P.; Novo, A. Resolution of GPR bowtie antennas: An experimental approach. J. Appl. Geophys 2009, 67, 367–373. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | 500 MHz Shielded Antenna | 800 MHz Shielded Antenna |
|---|---|---|
| −10 dB low limit frequency: fL | 138 MHz | 230 MHz |
| −10 dB high limit frequency: fH | 591 MHz | 1.280 GHz |
| −10 dB bandwidth: Bf | 453 MHz | 1.050 GHz |
| Center frequency: fc | 364 MHz | 755 MHz |
| Depth Range (cm) | 0–10 | 10–20 | 20–30 | 30–40 | 40–50 | 0–50 | |
|---|---|---|---|---|---|---|---|
| Estimated Weightwith GPR (g) | 2404.8 | 4101.6 | 2403.2 | 1960.2 | 1293.8 | 12,163.6 | |
| Dry Weight of All Roots (g) (*Error) | Including Tree Stump | 5697(−55.8%) | 9909.8(−58.6%) | 1937.4(+24%) | 2251.4(−12.9%) | 1468.7(−11.9%) | 21,264.3(−42.8%) |
| Excluding Tree Stump | 1744.5(+37.9%) | 3664.6(+11.9%) | 1937.4(+24%) | 2251.4(−12.9%) | 1468.7(−11.9%) | 11,066.6(+9.9%) | |
| Root Samples (Size: n) | Pixels within Threshold Range | High Amplitude Area | Time Interval ΔT3 | Total Time Interval ΔT = ΔT1 + ΔT2 + ΔT3 + ΔT4 | Magnitude Width Δw |
|---|---|---|---|---|---|
| Root 1 (20) | r = 0.5189 | r = 0.5630 | r = 0.7012 | r = 0.6613 | r = 0.7889 |
| p = 0.019 | p = 0.005 | p < 0.001 | p < 0.001 | p < 0.001 | |
| Root 2 (17) | r = 0.1751 | r = 0.1560 | r = 0.6734 | r = 0.6098 | r = 0.6874 |
| p = 0.397 | p = 0.451 | p < 0.001 | p = 0.002 | p < 0.001 | |
| Root Samples (Size: n) | Average Magnitude Width Δw (cm) | Estimated Average Diameter (cm) | True Average Diameter (cm) | Error |
|---|---|---|---|---|
| Root 1 (20) | 5.3 | 5.3 | 6.1 | 13% |
| Root 2 (17) | 5.5 | 4.8 | 5.7 | 16% |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Zhu, S.; Huang, C.; Su, Y.; Sato, M. 3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field. Remote Sens. 2014, 6, 5754-5773. https://doi.org/10.3390/rs6065754
Zhu S, Huang C, Su Y, Sato M. 3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field. Remote Sensing. 2014; 6(6):5754-5773. https://doi.org/10.3390/rs6065754
Chicago/Turabian StyleZhu, Shiping, Chunlin Huang, Yi Su, and Motoyuki Sato. 2014. "3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field" Remote Sensing 6, no. 6: 5754-5773. https://doi.org/10.3390/rs6065754
APA StyleZhu, S., Huang, C., Su, Y., & Sato, M. (2014). 3D Ground Penetrating Radar to Detect Tree Roots and Estimate Root Biomass in the Field. Remote Sensing, 6(6), 5754-5773. https://doi.org/10.3390/rs6065754