Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use

Abstract
:1. Introduction
2. UAS Platform Types and Characteristics
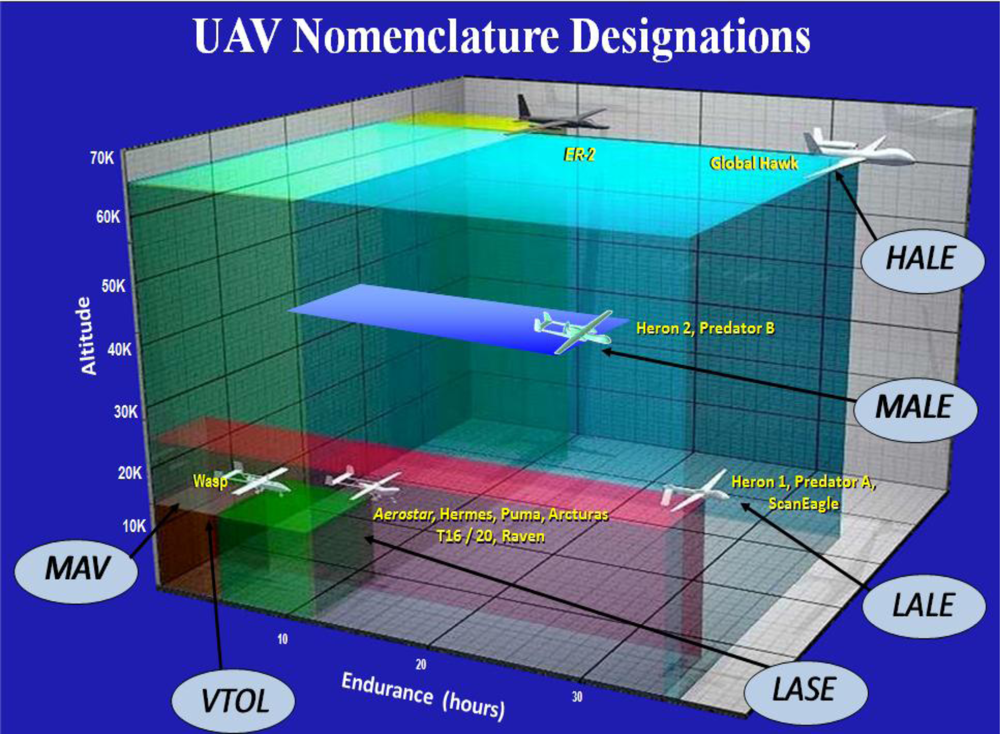
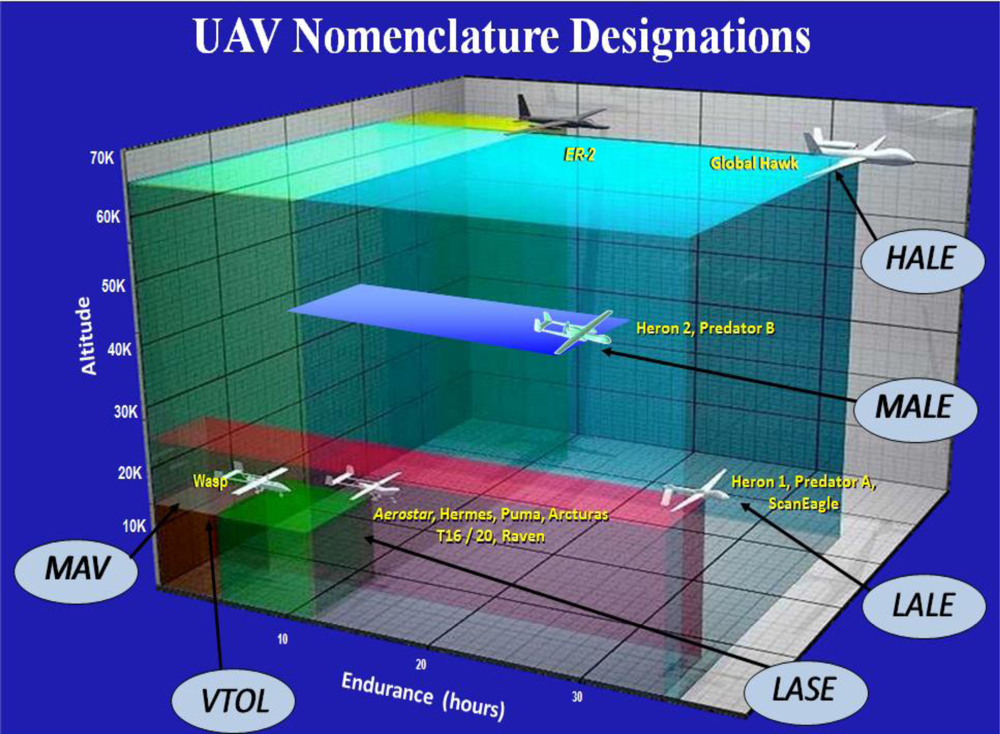
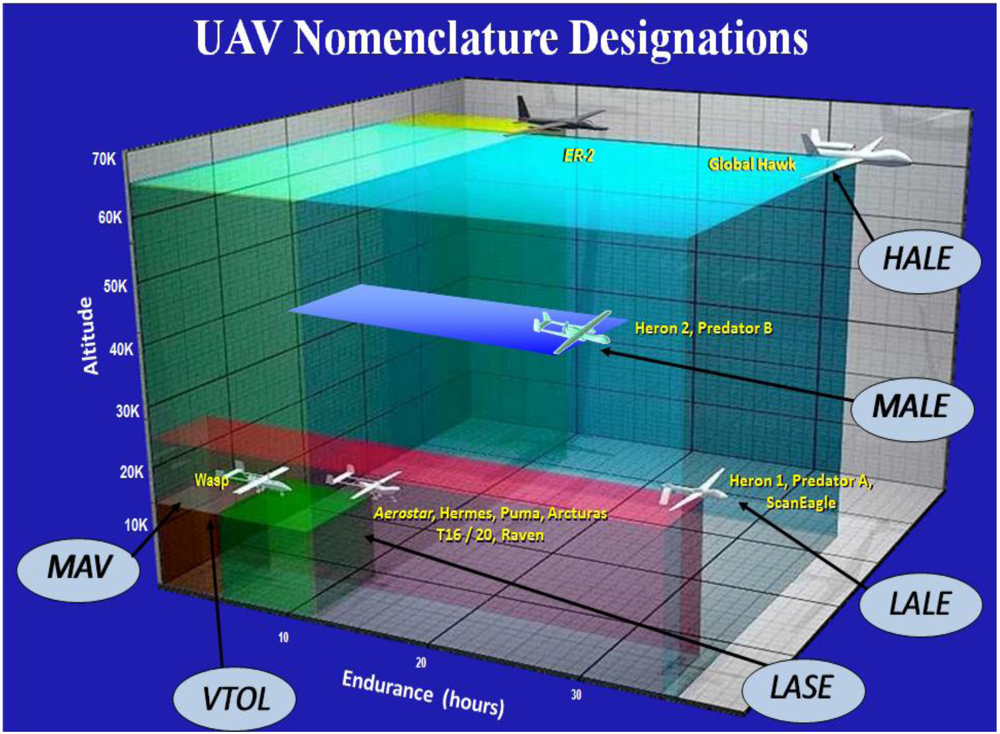
2.1. Classification of UAS Platforms
- MAV (Micro (or Miniature) or NAV (Nano) Air Vehicles): are so called because of their size, which typically enables military versions of these aircraft to be transported within individual soldiers’ backpacks. These aircraft tend to operate at very low altitudes (<330 m), with size limitations on battery capacity leading to short flight times in the vicinity of ca. 5–30 min.
- VTOL (Vertical Take-Off & Landing): These aircraft require no takeoff or landing run, and are therefore typically chosen in situations where limitations of terrain require this specialized capability. Aircraft of this type operate at varying altitudes depending on their mission profile, but predominantly fly at low altitudes. High power requirements for hovering flight limit the flight durations for VTOLs, except in the largest sizes where increased lifting capabilities accommodate large fuel capacity.
- LASE (Low Altitude, Short-Endurance): systems, also known as sUAS, small unmanned aircraft systems, also obviate the need for runways with aircraft optimized for easy field deployment/recovery and transport. The aircraft component of these systems typically weighs ca. 2–5 kg, with wingspans <3 m to enable launching from miniature catapult systems, or by hand. Compromises between weight and capability tend to reduce endurance and communication ranges to 1–2 h and within a few km of ground stations.
- LASE Close: This category describes small UAS whose aircraft do require runways, but whose larger size and weight confer increased capabilities. These systems operate at up to ca. 1,500 m altitude and may remain aloft for multiple hours, although these limits have been substantially exceeded by specially-modified “record-breaker” aircraft.
- LALE (Low Altitude, Long Endurance): Typically at the upper end of the “sUAS” weight designation by the United States Federal Aviation Administration (FAA; see below), these UAS may carry payloads of several kg at altitudes of a few thousand meters for extended periods.
- MALE (Medium Altitude, Long Endurance): aircraft are typically much larger than low-altitude classes of UAVs, operating at altitudes up to ca. 9,000 m on flights hundreds of km from their ground stations lasting many hours.
- HALE (High Altitude, Long Endurance): These are the largest and most complex of the UAS, with aircraft larger than many general-aviation manned aircraft. These UAVs may fly at altitudes of 20,000 m or more on missions that extend thousands of km. Some HALE aircraft have flight durations over 30 h, and have set records for altitude and flight duration.
2.2. Characteristics and Examples of UAS Categories
2.2.1. MAV/NAV UAS
2.2.2. VTOL UAS
2.2.3. LASE/LALE UAS
2.2.4. MALE UAS
- CASIE (2009): The Characterization of Arctic Sea Ice Experiment operated from Svalbard, Norway, above the Arctic Circle. The CASIE experiment focused on measurement of sea-ice roughness via remote sensing to try to detect basic changes in ice conditions such as thickness and ice age and other factors;
- RAM-GGM (2011): The Right-of Way Automated Monitoring-Greenhouse Gas Mission pilot study occurred in Railroad Valley, NV, USA, with the focus to test bed instruments for autonomously detecting and locating methane releases from petroleum production, extraction sites and distribution networks. The missions in June 2011 with a Cavity-Ring Flux Analyzer onboard the SIERRA aircraft were successful in mapping methane levels in the lower atmosphere above a variety of locales in Railroad Valley;
- Long-Term Earthquake Hazards and groundwater measurement UAS (SIERRA) campaign (2011–2013): The SIERRA platform is being used to characterize seismic hazard potential and map paths for groundwater flow using high resolution magnetic field data collections along faults and fractures in otherwise inaccessible terrain in the western US (Oregon and California).
- High Resolution Assessment of Carbon Dynamics in Seagrass and Coral Reef Biomes (2011–2013): This SIERRA UAS mission focuses on hyperspectral bio-optical observations to assess core physiological and biogeochemical variables in seagrass and shallow tropical coral habitats. The primary SIERRA mission areas are the areas around Cedar Key, FL, USA, and Buccal Reef, Tobago (Caribbean Sea).
2.2.5. HALE UAS
- - Sustained flight above 16,700 m for four hours by the Altus UAS in 1999 after being equipped with a powerful turbocharger;
- - An altitude of over 17,000 m achieved by the Perseus B in 1998, an unofficial record for a turbocharged single-engine, propeller-driven craft;
- - An altitude of 24,460 m achieved by the Pathfinder-Plus in August 1998, a world record for both propeller-driven and solar-powered aircraft.
- - An unofficial world-record altitude of 29,543 m achieved by the Helios Prototype in August, 2001, more than two miles higher than any non-rocket powered aircraft had ever flown.
- - A follow-on NASA-supported endeavor, the UAV Science Demonstration Program (UAV-SDP) led to a successful crop, forest and coral reef imaging science demonstrations mission by the Pathfinder over the Hawaiian island of Kauai in 1997 (Figure 10).
2.3. Consideration of Payloads, Logistics Requirements
3. Discussion
3.1. Regulations Governing UAS Use
3.2. Current US Regulations
4. Conclusion
- Forest health monitoring: This application requires advanced electro-optical (E/O) sensor payloads, such as near-infrared and (in some cases) hyperspectral. Due to large areas of coverage required, MALE UAS are likely to be favored in the near term.
- Forest inventory: Coarse-scale inventory requiring lightweight E/O sensors may allow the use of LASE UAS, which would confer the additional advantage of operation away from runways.
- Wildlife surveys: Terrestrial flights for large-animal surveys have been conducted using LASE UAS, while MALE aircraft may be preferred for marine surveys due to requirements for extended operations.
- Avalanche patrols: Depending on local facilities and preferred operations styles, this application may utilize either MAVs carried by rescue personnel, or LASE or MALE UAS operated from larger or fixed stations.
- Air quality monitoring: Sampling payloads may require the additional lift capacity of larger UAS, but generally the geographic scope of the mission profile will determine whether short-duration flights by VTOL or the greater coverage and duration offered by LASE or MALE UAS are preferred.
- Plume tracking: For monitoring of water pollution, repeated flights from local platforms may be accomplished by VTOL UAS. However, extensive surveys such as those required to track oil spills may make MALE UAS preferable. Payload requirements, which will impact platform choice, will be driven by specific pollutant types.
- Groundwater discharge monitoring: Because these surveys are likely to take place over areas with easily-identified ground-control points (GCPs), the high costs associated with high-precision georeferencing payloads may not be necessary for UAS use by agencies charged with these missions. In the case of local-scale missions of this profile, LASE UAS equipped with visible-spectrum or IR payloads (for nocturnal surveys) may be used.
- Mine surveys: Operation inside small, confined areas without GPS coverage make VTOL and MAV or NAV UAS a likely choice for enclosed mines, while larger LASE or VTOL with exotic payloads (e.g., LIDAR, RADAR) can be envisaged to improve surveys and operations in open-pit mines.
- Precision agriculture: Monitoring of crop health and precision application of chemicals require large payloads such as pesticide/herbicide applicators and advanced E/O sensors, as well as precise navigational and maneuvering capability. Relatively small areas of operation combine to yield a preference for larger VTOL UAS in these applications.
Acknowledgments
References
- Watts, A.C.; Kobziar, L.N.; Percival, H.F. Unmanned Aircraft Systems for Wildland Fire Monitoring and Research. Proceedings of the 24th Tall Timbers Fire Ecology Conference: The Future of Fire: Public Awareness, Health, and Safety, Tallahassee, FL, USA, 11–15 January 2009; pp. 86–90.
- Haydon, F.S. Aeronautics in the Union and Confederate Armies, With a Survey of Military Aeronautics Prior to 1861. In Military Ballooning During the Early Civil War; Johns Hopkins University Press: Baltimore, MD, USA, 2000; Volume 1. [Google Scholar]
- Bowen, D. Encyclopedia of War Machines: An Historical Survey of the World’s Great Weapons; Peerage Books: London, UK, 1977. [Google Scholar]
- Hannavy, J. (Ed.) Encyclopedia of Nineteenth-Century Photography; Routledge; Taylor & Francis Group, 2007; Volume 1, pp. 14–15.
- Nyquist, J.E. Unmanned aerial vehicles that even geoscience departments can afford. Geotimes 1997, 42, 20–23. [Google Scholar]
- Quilter, M.C.; Anderson, V.J. A proposed method for determining shrub utilization using LA/LS imagery. J. Range Manage 2001, 54, 378–381. [Google Scholar]
- Polski, P. DHS View of Unmanned Aerial Vehicle Needs. Proceedings of AIAA 3rd Unmanned Unlimited Technical Conference, Chical, IL, USA, 20–23 September 2004.
- Kaestner, R.; Thrun, S.; Montemerlo, M.; Whalley, M. A Non-Rigid Approach to Scan Alignment and Change Detection Using Range Sensor Data. In Field and Service Robotics: Results of the 5th International Conference STAR 25; Cooke, P.I., Sukkarieh, S., Eds.; Springer-Verlaag: Berlin, Germany, 2006; pp. 179–194. [Google Scholar]
- Watts, A.C.; Perry, J.H.; Smith, S.E.; Burgess, M.A.; Wilkinson, B.E.; Szantoi, Z.; Ifju, P.G.; Percival, H.F. Small unmanned aircraft systems for low-altitude aerial surveys. J. Wildl. Manage 2010, 7, 1614–1619. [Google Scholar]
- Merlin, P. Ikhana Unmanned Aircraft System: Western States Fire Missions. In NASA Monographs in Aerospace History #44 SP-2009-4544; NASA: Washington, DC, USA, 2009; pp. 1–70. [Google Scholar]
- Ambrosia, V.G.; Wegener, S.; Zajkowski, T.; Sullivan, D.V.; Buechel, S.; Enomoto, F.; Hinkley, E.A.; Lobitz, B.; Schoenung, S. The Ikhana UAS western states fire imaging missions: From concept to reality (2006–2010). Geocarto Int 2011, 26, 85–101. [Google Scholar]
- Ambrosia, V.G.; Wegener, S.S.; Sullivan, D.V.; Buechel, S.W.; Dunagan, S.E.; Brass, J.A.; Stoneburner, J.; Schoenung, S.M. Demonstrating UAV-acquired real-time thermal data over fires. Photogramm. Eng. Remote Sensing 2003, 69, 391–402. [Google Scholar]
- Blakeslee, R.J.; Croskey, C.L.; Desch, M.D.; Farrell, W.M.; Goldberg, R.A.; Houser, J.G.; Kim, H.S.; Mach, D.M.; Mitchell, J.D.; Stoneburner, J.C. The Altus Cumulus Electrification Study (ACES): A UAV-Based Science Demonstration. Proceedings of International Conference on Atmospheric Electricity, Versailles, France, 9–13 June 2003; p. 1.
- Perry, J.H.; Mohamed, A.; El-Rahman, A.H.; Bowman, W.S.; Kaddoura, Y.O.; Watts, A.C. Precision Directly Georeferenced Unmanned Aerial Remote Sensing System: Performance Evaluation. Proceedings of the Institute of Navigation National Technical Meeting, San Diego, CA, USA, 28–30 January 2008; pp. 680–688.
- Wilkinson, B.E.; Dewitt, B.A.; Watts, A.C.; Mohamed, A.H.; Burgess, M.A. A new approach for passpoint generation from aerial video imagery. Photogramm. Eng. Remote Sensing 2009, 75, 1415–1424. [Google Scholar]
- Federal Aviation Administration, Unmanned Aircraft Operations in the National Airspace System; Federal Register: Washington, DC, USA, 2007; Volume 72, pp. 6689–6690.
- Federal Aviation Administration. Factsheet: Unmanned Aircraft Systems. Available online: http://www.faa.gov/about/initiatives/uas/ (accessed on 15 February 2012).
- Federal Aviation Administration, Unmanned Aircraft Operations in the National Airspace System (NAS); Federal Aviation Administration Air Traffic Organization Policy Notice N JO 7210.766; US Dept. of Transportation: Washington, DC, USA, 2011; pp. 1–12.
- Carey, B. Small UAS rule will begin phased entry of unmanned aircraft. Aviation International News Online. 4 October 2011. Available online: http://www.ainonline.com/?q=aviation-news/aviation-international-news/2011-10-04/small-uas-rule-will-begin-phased-entry-unmanned-aircraft (accessed on 23 October 2011).
- Grady, M. Coming soon: Era of UAS? AVflash News. 15 February 2012. Available online: http://www.avweb.com/avwebflash/news/ComingSoonEraOfUAS_206186-1.html (accessed on 15 February 2012).
- Department of State. The International Traffic in Arms Regulations (ITAR); US Department of State, Directorate of Defense Trade Controls: Washington, DC, USA. Available online: http://www.pmddtc.state.gov/regulations_laws/itar.html (accessed on 15 February 2012).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Aircraft | Flights | Hours | Fires Flown |
|---|---|---|---|---|
| 2006 | Altair | 4 | 68 | Mono Lake Prescribed Fire, Esperanza Fire (CA) Zaca, Tar, Colby, Babcock, Jackrabbit, Butler, North, Fairmont, Grouse, Lick, Bald, Moonlight, Zaca, SoCal Firestorm (CA); Trapper Ridge, Castle |
| 2007 | Ikhana | 12 | 89 | Rock (ID); WH (MT); Columbine, Hardscrabble, Granite Creek (WY); GW, Big Basin (OR); Domke Lake, South Omak (WA) |
| 2008 | Ikhana | 4 | 21 | Piute, Clover, Silver, North Mountain, American River, Cub Complex, Canyon Complex, Basin, Gap, Camp, Cascatel, Hidden (CA) |
| 2009 | Ikhana | 2 | 11 | Piute, Station Fire (CA; post-burn assessments) |
Share and Cite
Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671-1692. https://doi.org/10.3390/rs4061671
Watts AC, Ambrosia VG, Hinkley EA. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing. 2012; 4(6):1671-1692. https://doi.org/10.3390/rs4061671
Chicago/Turabian StyleWatts, Adam C., Vincent G. Ambrosia, and Everett A. Hinkley. 2012. "Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use" Remote Sensing 4, no. 6: 1671-1692. https://doi.org/10.3390/rs4061671
APA StyleWatts, A. C., Ambrosia, V. G., & Hinkley, E. A. (2012). Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sensing, 4(6), 1671-1692. https://doi.org/10.3390/rs4061671