

A Random Forest-Based Precipitation Detection Algorithm for FY-3C/3D MWTS2 over Oceanic Regions

 , , and
, , and 
Abstract
1. Introduction
2. Data and Methods
2.1. Satellite Microwave Radiometer
2.1.1. Advanced Microwave Sounding Unit-A (AMSU-A)
2.1.2. Microwave Temperature Sounder (MWTS)
2.2. Visible and Infrared Spin Scan Radiometer (VISSR)
2.3. GEO-LEO Satellite Image Fusion Algorithm
2.3.1. Time Matching
2.3.2. Observed Object Matching
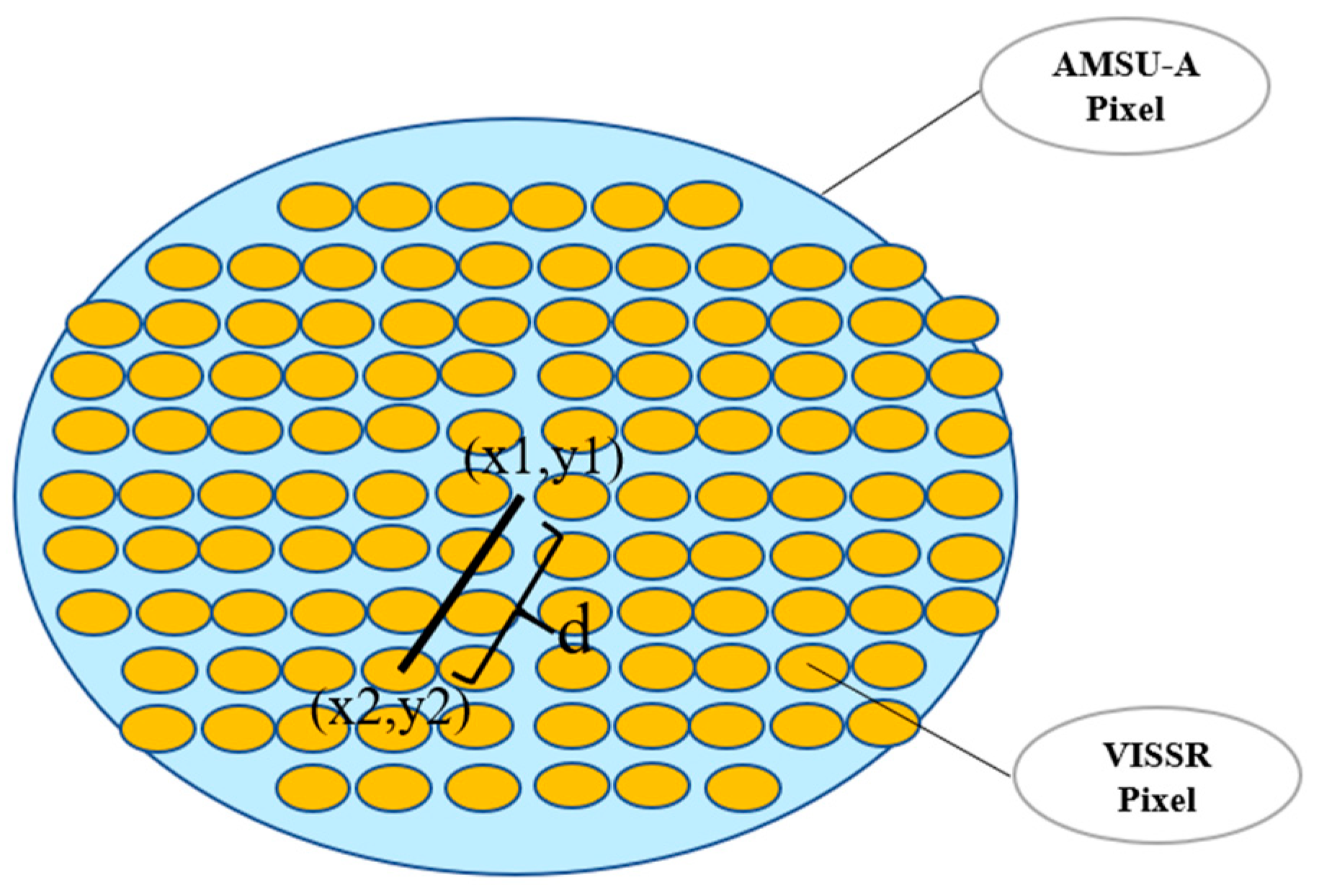
2.3.3. Pixel Matching
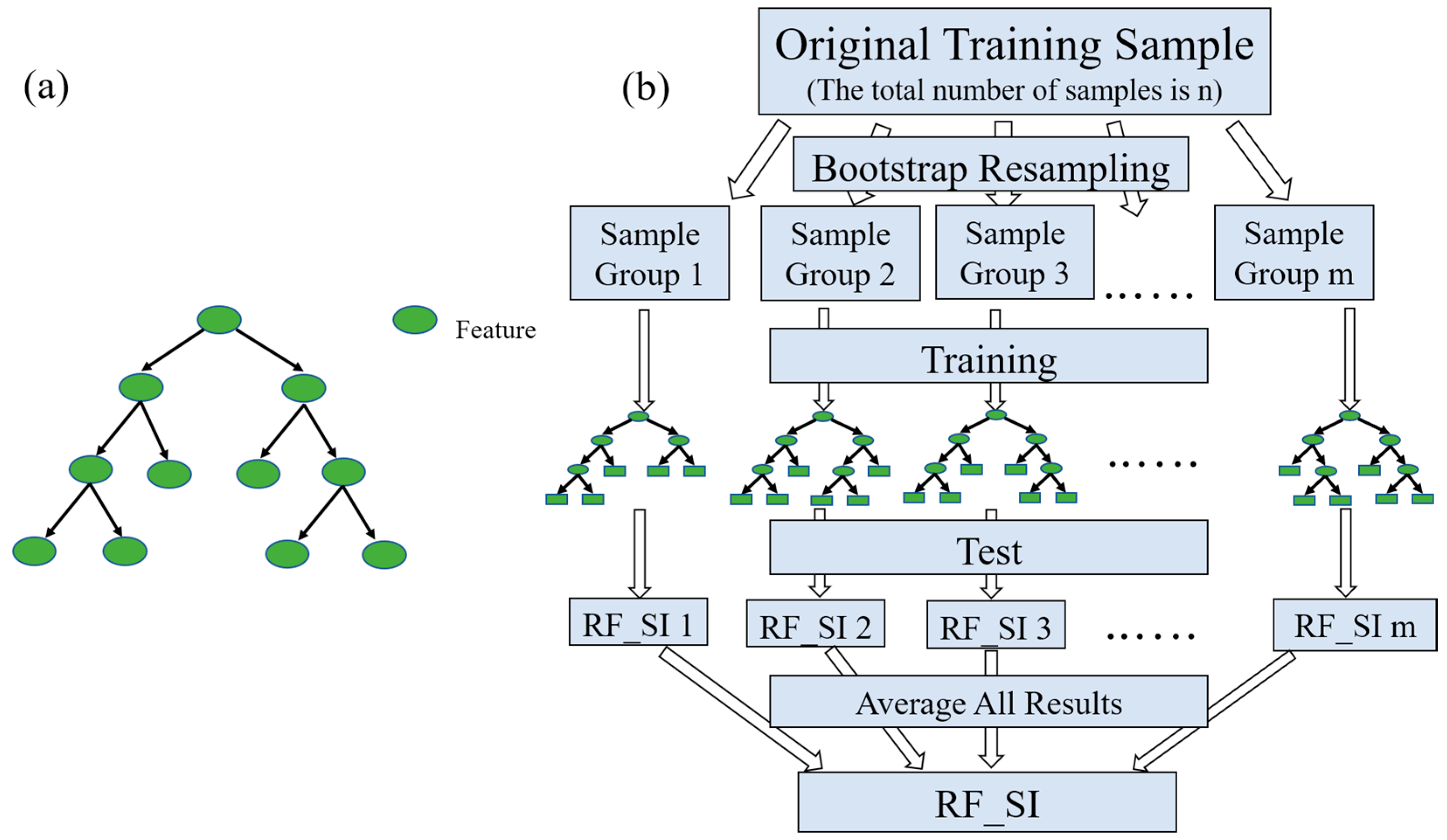
2.4. Precipitation Identification Method Based on the Random Forest Algorithm
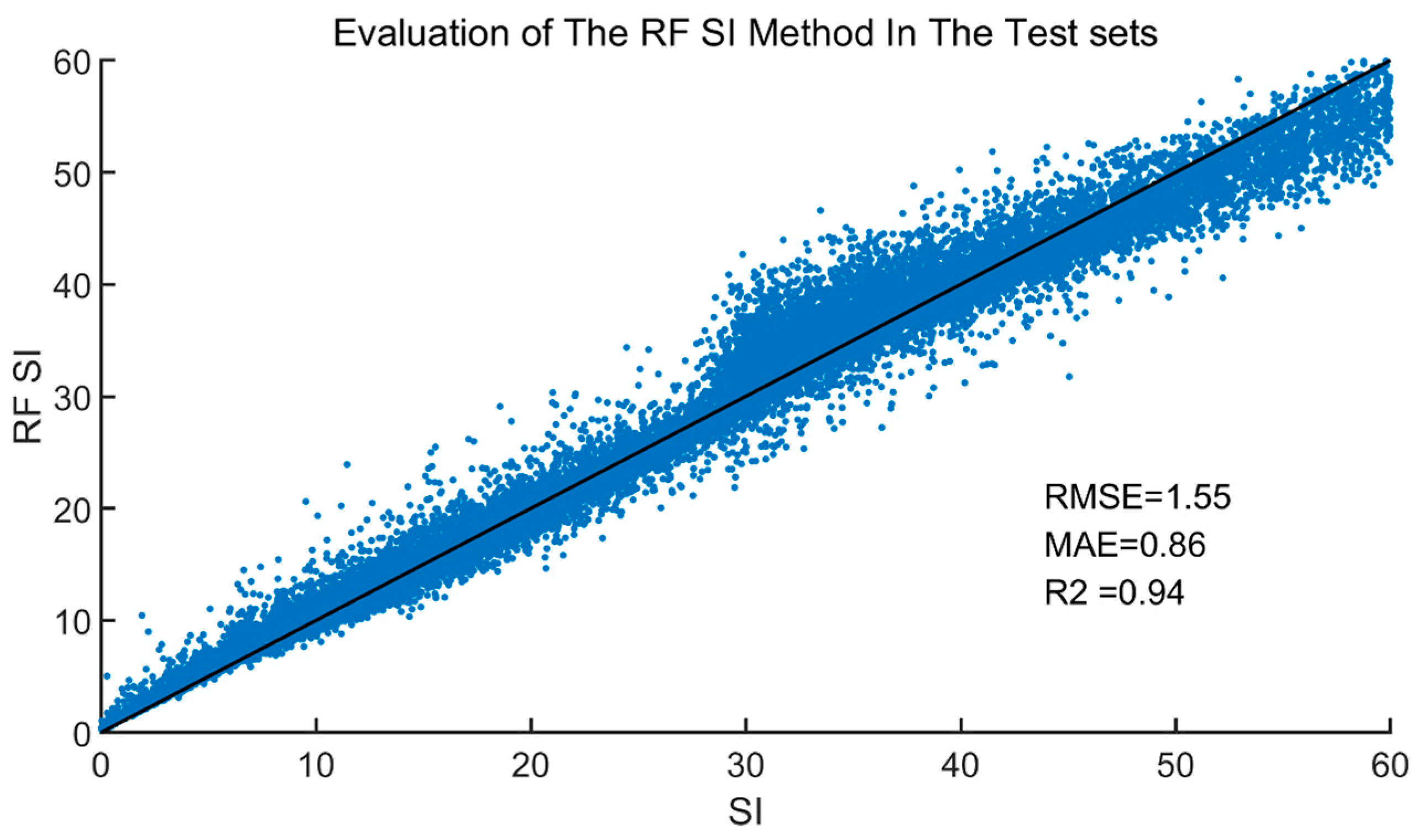
2.5. Error Analysis
3. Data Preprocessing and Model Training
3.1. Data Preprocessing
3.1.1. Data Selection
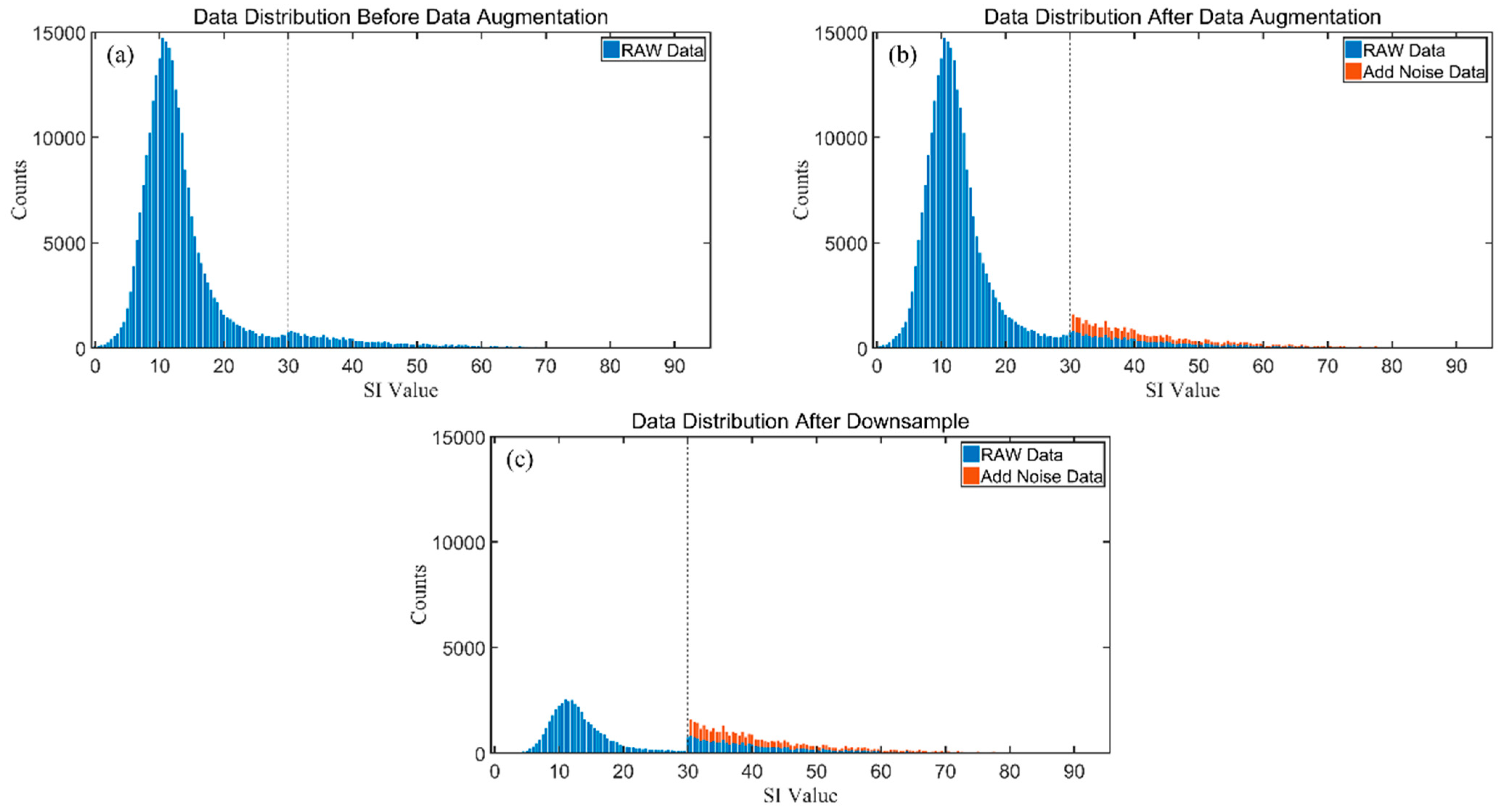
3.1.2. Data Augmentation and Downsampling
3.2. Model Training
3.2.1. Hyperparameters
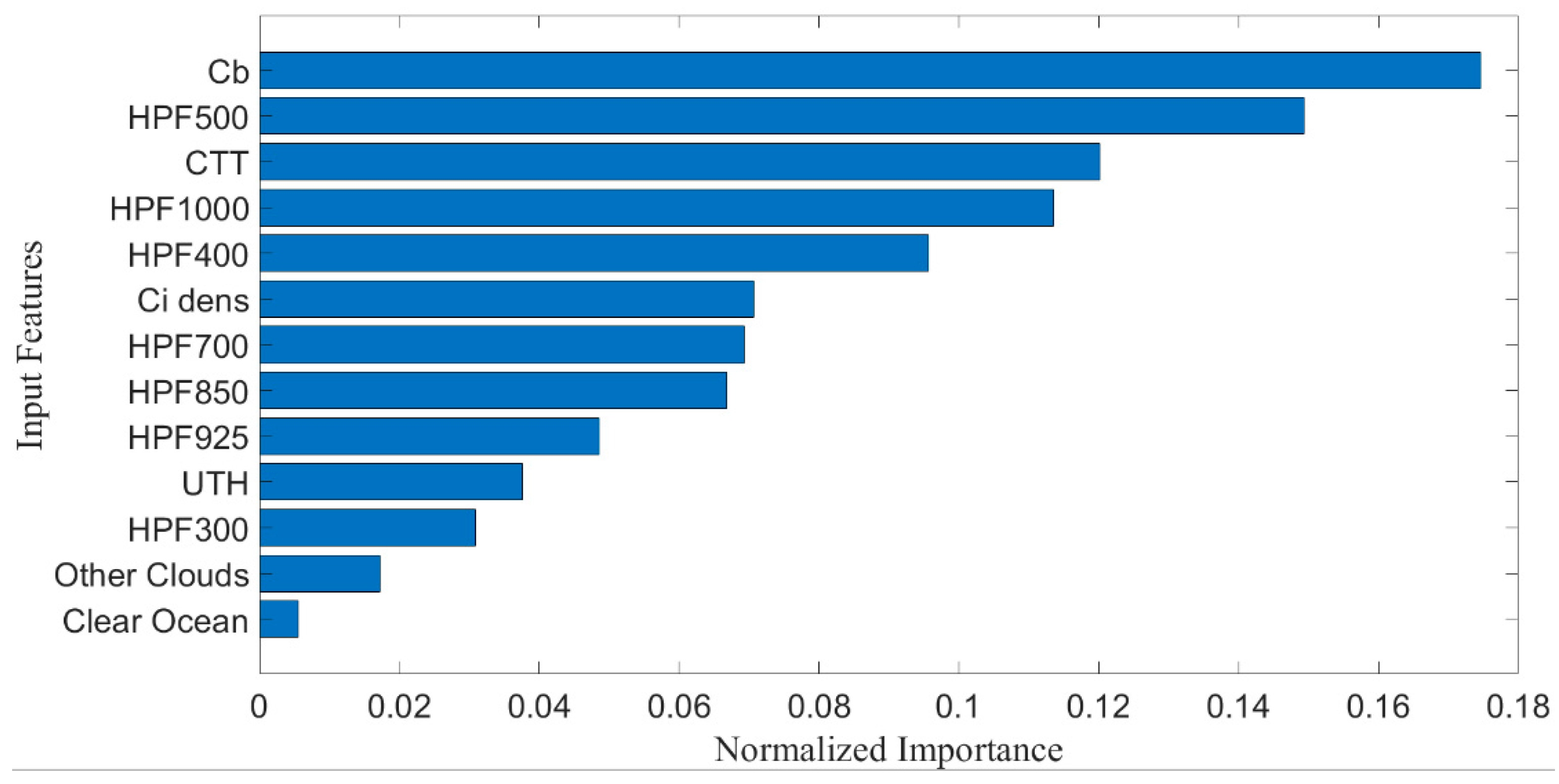
3.2.2. Sensitivity Analysis of the Cloud Parameters
4. Results
4.1. A Single-Case Analysis
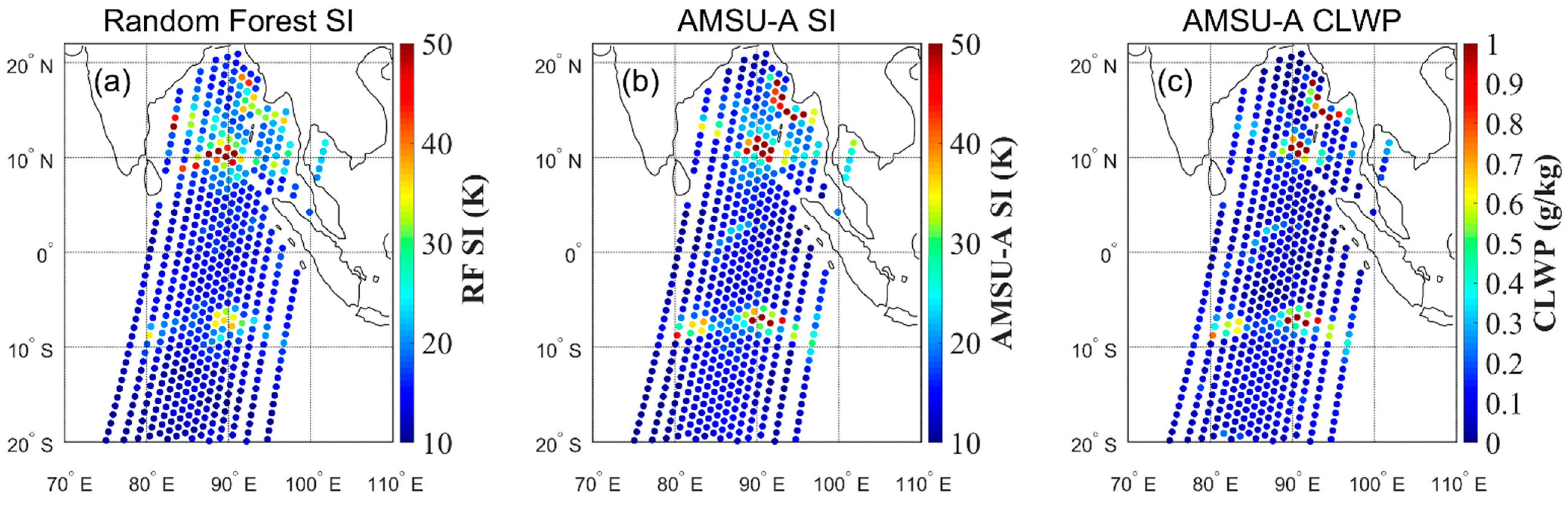
4.1.1. Matching RF_SI to AMSU-A Pixels
4.1.2. Matching RF_SI to MWTS2 and MWTS3 Pixels
4.2. A Time-Series Analysis
4.2.1. Accuracy (ACC), Probability of Detection (POD), and False-Alarm Rate (FAR) Analysis
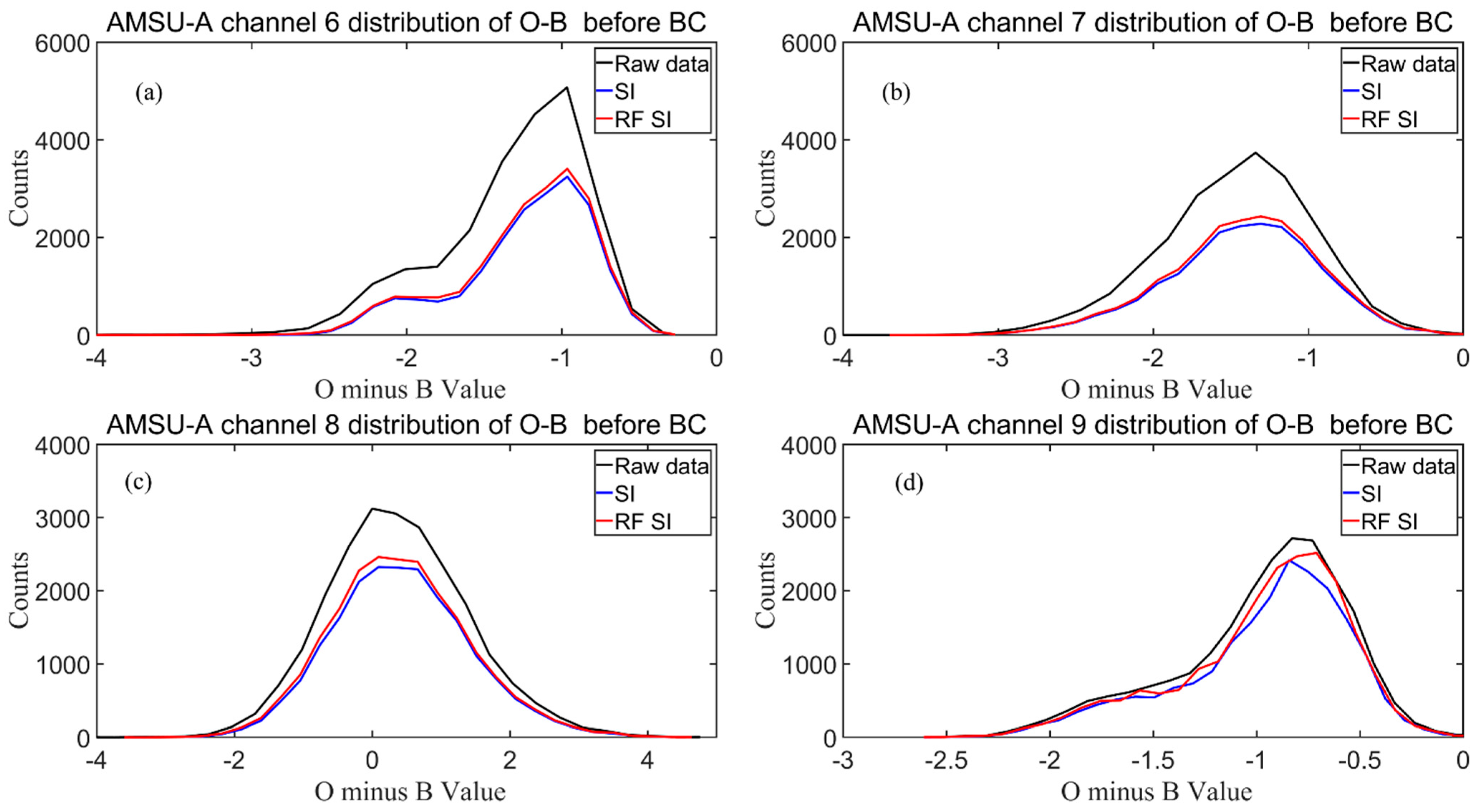
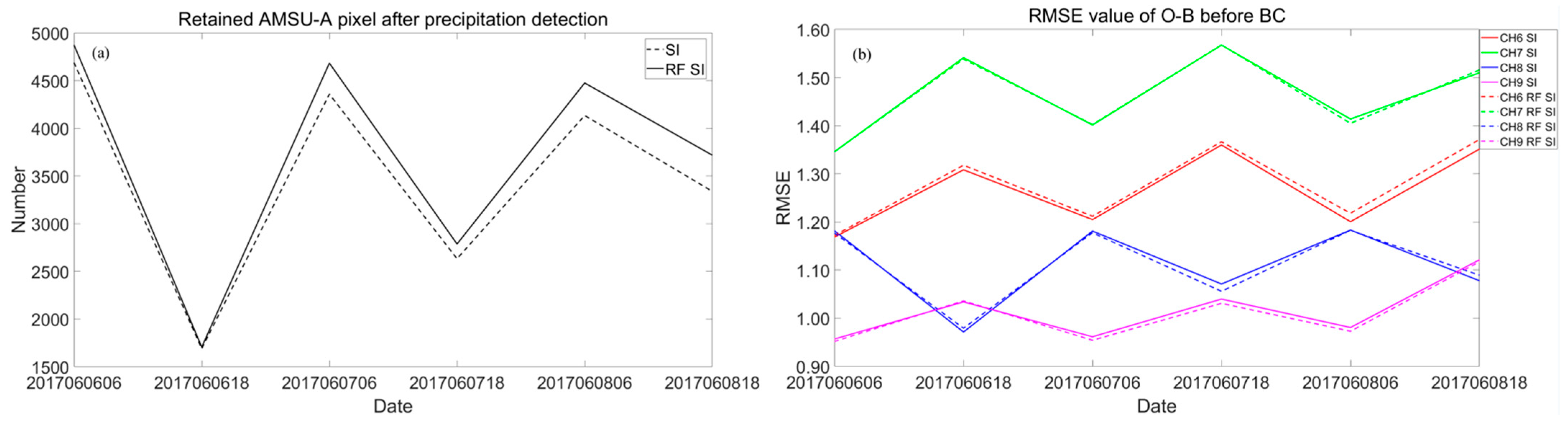
4.2.2. Analysis of the Deviation Between the Observed and Simulated Brightness Temperatures (O-B)
5. Discussion
6. Conclusions
- (1)
- Data augmentation and downsampling techniques are employed to transform the given imbalanced dataset into a balanced dataset, thereby ensuring a high degree of model fit. An evaluation of the machine learning algorithm reveals that the ranking of the sensitivities of the input features to the particle scattering of microwave spectrum hydrometeors is highly consistent with the existing meteorological knowledge.
- (2)
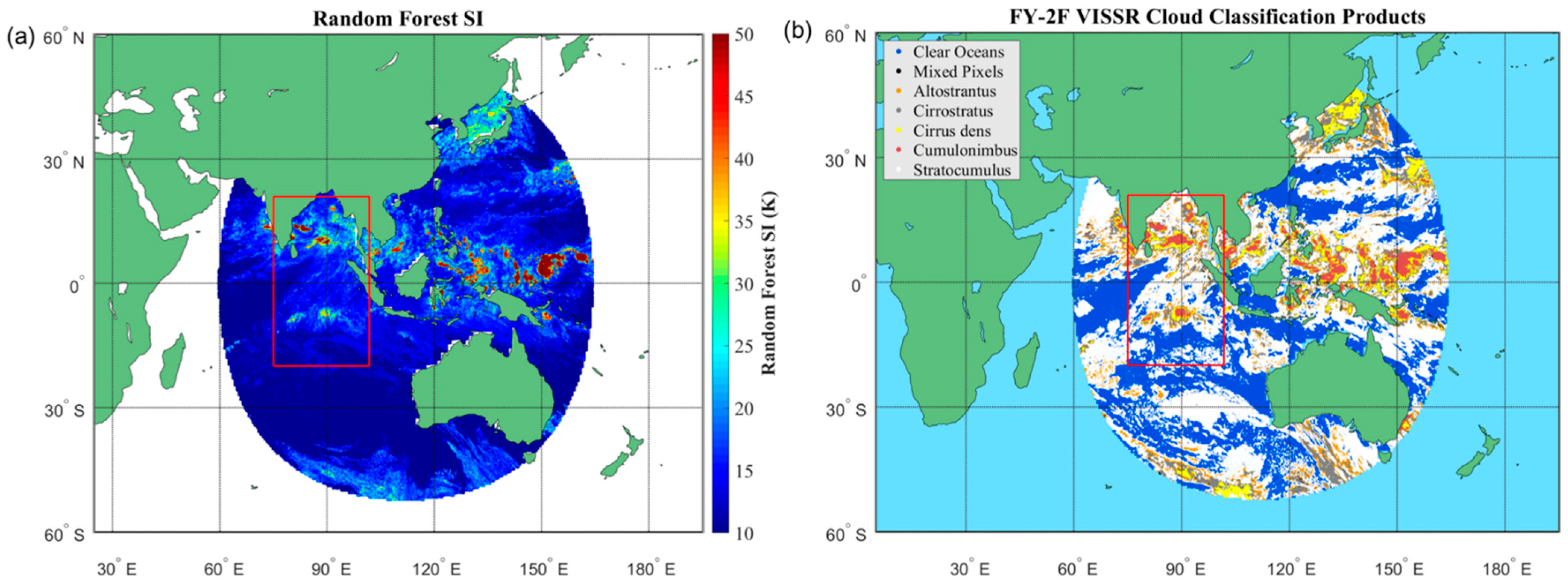
- Similar to the SI and CLWP, RF_SI is associated with deep convective cloud regions and therefore is a good indicator of the horizontal distribution of microwave scattering.
- (3)
- In the time series analysis, the precision of RF_SI is stable, with little change observed over time. Compared with those of the NOAA-19 AMSU-A-based traditional SI and CLWP precipitation detection algorithms, the accuracy and detection rates of the RF_SI method exceed 94% and 92%, respectively, and the error rate is less than 3%.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Geer, A.J.; Baordo, F.; Bormann, N.; Chambon, P.; English, S.J.; Kazumori, M.; Lawrence, H.; Lean, P.; Lonitz, K.; Lupu, C. The growing impact of satellite observations sensitive to humidity, cloud and precipitation. Q. J. R. Meteorol. Soc. 2017, 143, 3189–3206. [Google Scholar] [CrossRef]
- Bauer, P.; Moreau, E.; Chevallier, F.; O’keeffe, U. Multiple-scattering microwave radiative transfer for data assimilation applications. Q. J. R. Meteorol. Soc. 2006, 132, 1259–1281. [Google Scholar] [CrossRef]
- Ferraro, R.R.; Weng, F.; Grody, N.C.; Zhao, L. Precipitation characteristics over land from the NOAA-15 AMSU Sensor. Geophys. Res. Lett. 2000, 27, 2669–2672. [Google Scholar] [CrossRef]
- Yang, Y.; Wei, H.; Peiming, D. Overview on the quality control in assimilation of AMSU microwave sounding data. Meteorol. Mon. 2011, 37, 1395–1401. [Google Scholar]
- Weng, F.; Zhao, L.; Ferraro, R.R.; Poe, G.; Li, X.; Grody, N.C. Advanced microwave sounding unit cloud and precipitation algorithms. Radio Sci. 2003, 38, 8068. [Google Scholar] [CrossRef]
- Chen, W.; Chi, J.; Li, Y.; Li, H. Microwave temperature sounding (MWTS) for FY-3 meteorology satellite. Eng. Sci. 2013, 15, 88–91. [Google Scholar]
- Yang, J.; Zhang, P.; Lu, N.; Yang, Z.; Shi, J.; Dong, C. Improvements on global meteorological observations from the current Fengyun 3 satellites and beyond. Int. J. Digit. Earth 2012, 5, 251–265. [Google Scholar] [CrossRef]
- Li, J.; Zou, X. A quality control procedure for FY-3A MWTS measurements with emphasis on cloud detection using VIRR cloud fraction. J. Atmos. Ocean. Technol. 2013, 30, 1704–1715. [Google Scholar] [CrossRef]
- Sun, L.; Fu, Y. A new merged dataset for analyzing clouds, precipitation and atmospheric parameters based on ERA5 reanalysis data and the measurements of TRMM PR and VIRS. Zenodo 2021, 1–26. [Google Scholar] [CrossRef]
- Qin, L.; Chen, Y.; Ma, G.; Weng, F.; Meng, D.; Zhang, P. Assimilation of FY-3D MWTS-II radiance with 3D precipitation detection and the impacts on typhoon forecasts. Adv. Atmos. Sci. 2022, 40, 900–919. [Google Scholar] [CrossRef]
- Zhang, J.; Fan, H.; He, D.; Chen, J. Integrating precipitation zoning with random forest regression for the spatial downscaling of satellite-based precipitation: A case study of the Lancang–Mekong River basin. Int. J. Climatol. 2019, 39, 3947–3961. [Google Scholar] [CrossRef]
- Wang, G.; Ye, S.; Yuan, S.; Jiang, Y. Precipitation estimation by infrared brightness temperature measurement of FengYun-4A imager. In Proceedings of the First International Conference on Spatial Atmospheric Marine Environmental Optics (SAME 2023), Shanghai, China, 7–9 April 2023; pp. 197–200. [Google Scholar]
- Chen, C.; Hu, B.; Li, Y. Easy-to-use spatial random-forest-based downscaling-calibration method for producing precipitation data with high resolution and high accuracy. Hydrol. Earth Syst. Sci. 2021, 25, 5667–5682. [Google Scholar] [CrossRef]
- Nguyen, G.V.; Le, X.-H.; Van, L.N.; May, D.T.T.; Jung, S.; Lee, G. Machine learning approaches for reconstructing gridded precipitation based on multiple source products. J. Hydrol. Reg. Stud. 2023, 48, 101475. [Google Scholar] [CrossRef]
- Kühnlein, M.; Appelhans, T.; Thies, B.; Nauss, T. Improving the accuracy of rainfall rates from optical satellite sensors with machine learning—A random forests-based approach applied to MSG SEVIRI. Remote Sens. Environ. 2014, 141, 129–143. [Google Scholar] [CrossRef]
- English, S.J.; Renshaw, R.J.; Dibben, P.C.; Smith, A.J.; Rayer, P.J.; Poulsen, C.; Saunders, F.W.; Eyre, J.R. A comparison of the impact of TOVS arid ATOVS satellite sounding data on the accuracy of numerical weather forecasts. Q. J. R. Meteorol. Soc. 2000, 126, 2911–2931. [Google Scholar] [CrossRef]
- English, S.J.; Renshaw, R.J.; Dibben, P.C.; Eyre, J.R. The AAPP module for identifying precipitation, ice cloud, liquid water and surface type on the AMSU-A grid. In Proceedings of the Ninth International TOVS Study Conference, Igls, Austria, 20–26 February 1997; Eyre, J.R., Ed.; ECMWF: Reading, UK, 1997; pp. 119–130. [Google Scholar]
- Xu, N.; Hu, X.; Chen, L.; Min, M. Inter-calibration of infrared channels of FY-2/VISSR using high-spectral resolution sensors IASI and AIRS. Natl. Remote Sens. Bull. 2012, 16, 939–952. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Zhang, Q.; Yu, Y.; Zhang, W.; Luo, T.; Wang, X. Cloud detection from FY-4A’s geostationary interferometric infrared sounder using machine learning approaches. Remote Sens. 2019, 11, 3035. [Google Scholar] [CrossRef]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Ho, T.K. The random subspace method for constructing decision forests. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 832–844. [Google Scholar] [CrossRef]
- Breiman, L. Classification and Regression Trees; Routledge: Boca Raton, FL, USA, 2017. [Google Scholar]
- Han, H.; Lee, S.; Im, J.; Kim, M.; Lee, M.-I.; Ahn, M.H.; Chung, S.-R. Detection of convective initiation using Meteorological Imager onboard Communication, Ocean, and Meteorological Satellite based on machine learning approaches. Remote Sens. 2015, 7, 9184–9204. [Google Scholar] [CrossRef]
- Zhang, Y.; Kang, B.; Hooi, B.; Yan, S.; Feng, J. Deep long-tailed learning: A survey. arXiv 2021, arXiv:2110.04596. [Google Scholar] [CrossRef] [PubMed]
- Kang, B.; Xie, S.; Rohrbach, M.; Yan, Z.; Gordo, A.; Feng, J.; Kalantidis, Y. Decoupling representation and classifier for long-tailed recognition. arXiv 2019, arXiv:1910.09217. [Google Scholar]
- Wang, T.; Li, Y.; Kang, B.; Li, J.; Liew, J.H.; Tang, S.; Hoi, S.C.H.; Feng, J. The devil is in classification: A simple framework for long-tail instance segmentation. In Proceedings of the Computer Vision—ECCV 2020, Glasgow, UK, 23–28 August 2020; pp. 728–744. [Google Scholar]
- Li, B.; Hou, Y.; Che, W. Data augmentation approaches in natural language processing: A survey. AI Open 2021, 3, 71–90. [Google Scholar] [CrossRef]
- Wang, B.; Gong, N.Z. Stealing hyperparameters in machine learning. In Proceedings of the 2018 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 20–24 May 2018; pp. 36–52. [Google Scholar]
- Sun, Y.; Wang, Y.; Guo, L.; Ma, Z.; Jin, S. The comparison of optimizing SVM by GA and grid search. In Proceedings of the 2017 13th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Yangzhou, China, 20–22 October 2017; pp. 354–360. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Index | Center Frequency (GHz) | Polarization | Main Purpose | ||||
|---|---|---|---|---|---|---|---|
| MTWS3 | MWTS2 | MTWS3 | MWTS2 | MTWS3 | MWTS2 | MTWS3 | MWTS2 |
| 1 | 23.80 | QH | Cloud and Precipitation | ||||
| 2 | 31.40 | QH | Cloud and Precipitation | ||||
| 3 | 1 | 50.30 | 50.30 | QV | QH | Temperature | Temperature |
| 4 | 2 | 51.76 | 51.76 | QV | QH | Temperature | Temperature |
| 5 | 3 | 52.80 | 52.80 | QV | QH | Temperature | Temperature |
| 6 | 53.246 ± 0.08 | QV | Temperature | ||||
| 7 | 4 | 53.596 ± 0.115 | 53.596 | QV | QH | Temperature | Temperature |
| 8 | 53.948 ± 0.081 | QV | Temperature | ||||
| 9 | 5 | 54.40 | 54.40 | QV | QH | Temperature | Temperature |
| 10 | 6 | 54.94 | 54.94 | QV | QH | Temperature | Temperature |
| 11 | 7 | 55.50 | 55.50 | QV | QH | Temperature | Temperature |
| 12 | 8 | 57.290344 (fo) | 57.290344 (fo) | QV | QH | Temperature | Temperature |
| 13 | 9 | fo ± 0.217 | fo ± 0.217 | QV | QH | Temperature | Temperature |
| 14 | 10 | fo ± 0.3222 ± 0.048 | fo ± 0.3222 ± 0.048 | QV | QH | Temperature | Temperature |
| 15 | 11 | fo ± 0.3222 ± 0.022 | fo ± 0.3222 ± 0.022 | QV | QH | Temperature | Temperature |
| 16 | 12 | fo ± 0.3222 ± 0.010 | fo ± 0.3222 ± 0.010 | QV | QH | Temperature | Temperature |
| 17 | 13 | fo ± 0.3222 ± 0.0045 | fo ± 0.3222 ± 0.0045 | QV | QH | Temperature | Temperature |
| Raw Data | Data Enhancement | Downsampling | Training Set | Testing Set | |
|---|---|---|---|---|---|
| Nonprecipitation samples | 244,497 | 244,497 | 53,826 | 43,060 | 10,765 |
| Precipitation samples | 26,913 | 53,826 | 53,826 | 43,060 | 10,765 |
| ACC | POD | FAR | |
|---|---|---|---|
| RF_SI/SI | 96.77% | 92.67% | 2.02% |
| RF_SI/CLWP | 95.89% | 95.70% | 6.13% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, T.; Yu, Y.; Ma, G.; Zhang, W.; Qin, L.; Shi, W.; Dai, Q.; Zhang, P. A Random Forest-Based Precipitation Detection Algorithm for FY-3C/3D MWTS2 over Oceanic Regions. Remote Sens. 2025, 17, 1566. https://doi.org/10.3390/rs17091566
Luo T, Yu Y, Ma G, Zhang W, Qin L, Shi W, Dai Q, Zhang P. A Random Forest-Based Precipitation Detection Algorithm for FY-3C/3D MWTS2 over Oceanic Regions. Remote Sensing. 2025; 17(9):1566. https://doi.org/10.3390/rs17091566
Chicago/Turabian StyleLuo, Tengling, Yi Yu, Gang Ma, Weimin Zhang, Luyao Qin, Weilai Shi, Qiudan Dai, and Peng Zhang. 2025. "A Random Forest-Based Precipitation Detection Algorithm for FY-3C/3D MWTS2 over Oceanic Regions" Remote Sensing 17, no. 9: 1566. https://doi.org/10.3390/rs17091566
APA StyleLuo, T., Yu, Y., Ma, G., Zhang, W., Qin, L., Shi, W., Dai, Q., & Zhang, P. (2025). A Random Forest-Based Precipitation Detection Algorithm for FY-3C/3D MWTS2 over Oceanic Regions. Remote Sensing, 17(9), 1566. https://doi.org/10.3390/rs17091566