1. Introduction
An atmospheric duct is a special atmospheric refractive event that has a refractive ratio that is greater than the Earth’s curvature. According to the formation mechanism and vertical structure of atmospheric ducts, they can be divided into three types, namely evaporation ducts, surface ducts, and elevation ducts. Evaporation ducts typically occur over the ocean surface with a height below 40 m, which is similar to the altitude of shipborne radar, and they may exist permanently in some areas. They have many impacts on human activities, such as making radar suffer from blind zones and achieving over-the-horizon detection due to refraction that exceeds the curvature of the Earth [
1,
2,
3]. Despite the great influence of evaporation ducts, there is a lack of effective detection methods for them. Current approaches, such as GPS soundings, meteorological rockets, meteorological gradient towers, aircraft-based measurements, and microwave refractometers, are commonly used [
4]. However, these methods are constrained by issues such as limited spatial coverage, high operational costs, and low temporal resolution, hindering their widespread application.
Due to the limitations of in situ detection methods, remote sensing techniques utilizing microwave and optical technologies have been developed. For instance, Yang successfully inverted evaporation ducts over large sea-surface areas using satellite remote sensing data [
5]. Barrios utilized the ray-tracing method and rank correlation scheme to extract duct-related information [
6]. Refractivity from clutter (RFC) [
5,
7,
8,
9,
10,
11] has also shown significant potential for evaporation duct detection. However, RFC relies on active detection systems, which are prone to easy detection in real-world environments, limiting their practical application.
Global Navigation Satellite System Reflectometry (GNSS-R) is a widely used remote sensing technique with applications in sea wind detection [
12,
13,
14,
15,
16,
17], soil moisture monitoring [
18,
19], and snow depth estimation [
20,
21,
22,
23]. Due to its all-weather capability and passive detection nature, GNSS-R holds significant promise for retrieving evaporation duct parameters. Wang et al. theoretically demonstrated that it is a feasible way to detect evaporation ducts using GPS scattered signals, and they conducted experiments to validate their theory [
24]. Zhang et al. further explored the potential of inferring duct parameters from scattered GNSS signal power by using a parabolic wave equation. Examples in an evaporation duct, a surface-based duct, and an elevated duct were studied for low-elevation GPS L1 signal propagation [
25]. Additionally, Beihang University proposed a simulation method that approximates the GNSS reflection signal in a zone as a combination of several single reflection signals [
26]. Liu et al. proposed a method of inverting surface duct parameters based on the GNSS-R power received from low-elevation GNSS satellites. However, this method is not suitable for evaporation ducts [
27]. Liu et al. simulated GPS signals in an evaporation duct environment and introduced the concept of an effective scattering zone to distinguish signals influenced by evaporation ducts from those undergoing normal reflection [
28]. Despite these advancements, existing research primarily focuses on GNSS-R signal power, which is challenging to measure accurately due to the time-varying nature of the sea surface and the inherently low power of scattered signals. The goal of this study is to investigate the impact of evaporation ducts on GNSS-R delay maps and explore a method of detecting evaporation ducts using GNSS-R technology, which is studied through theoretical simulation, semi-physical simulation, and experimental measurement. This study demonstrated that evaporation ducts could cause a rise in the waveform in the non-specular region, and this is a feasible scheme for retrieving the evaporation duct height (EDH) using GNSS-R DM. An experiment was conducted to collect the response waveform of GNSS-R in an evaporation duct. The repeated waveform received in the experiment proves the simulation results, as the reference data indicate the presence of an evaporation duct. A retrieval attempt was made in this study. The results show that when the signal can be fully received, GNSS-R is a feasible scheme for detecting evaporation ducts.
The remainder of this article is organized as follows: the basic theory and simulations are introduced in
Section 2; the experimental instruments and data processing methods are displayed in
Section 3; the observation and retrieval results are presented and discussed in
Section 4;
Section 5 includes the discussion, conclusions, and future work.
2. Theory and Simulation of Evaporation Duct Detection Using GNSS-R
2.1. DM Data
In most GNSS-R observations, a delay Doppler map (DDM) is generated from cross-correlations in the code and frequency domains between the reflected signal and a replica of the baseband signal.
The DDM represents the power of the reflected signal after the cross-correlation, which can be estimated using a bistatic radar equation [
13]:
where
is the relative power of the reflection signal at a code delay of
and a Doppler frequency of
,
is the coherent integration time,
is the wavelength of the GNSS signal,
is the transmitted power of the GNSS satellite,
is the gain of the transmitter antenna,
is the gain of the receiving antenna, and
is the normalized bistatic radar cross section.
and
are the reference code delay and Doppler frequency of the signal propagating through the specular point, respectively.
is the correlation function of the GNSS, and
is the Doppler loss. For a ground-based receiver,
is approximately equal to
, allowing Equation (1) to be simplified as follows:
where
is the relative power of the reflection signal at a code delay of
.
It is worth noting that only values at the zero Doppler frequency of the DDM were chosen in this study, producing a delay map (DM). This approach significantly reduces the computational complexity of the receiver hardware. Therefore, DM is the primary observable in this study.
2.2. GNSS-R Signal in Evaporation Ducts
In a normal atmospheric environment, the reception range of a GNSS-R antenna that describes the maximum distance of all signals that can enter the antenna can be approximated using the following line-of-sight propagation formula [
29]:
where
is the radius of the Earth,
is the height of the receiver, and
is the range of reflected signals. For a ground-based receiver with a height of 10 m, the range
is approximately 13 km.
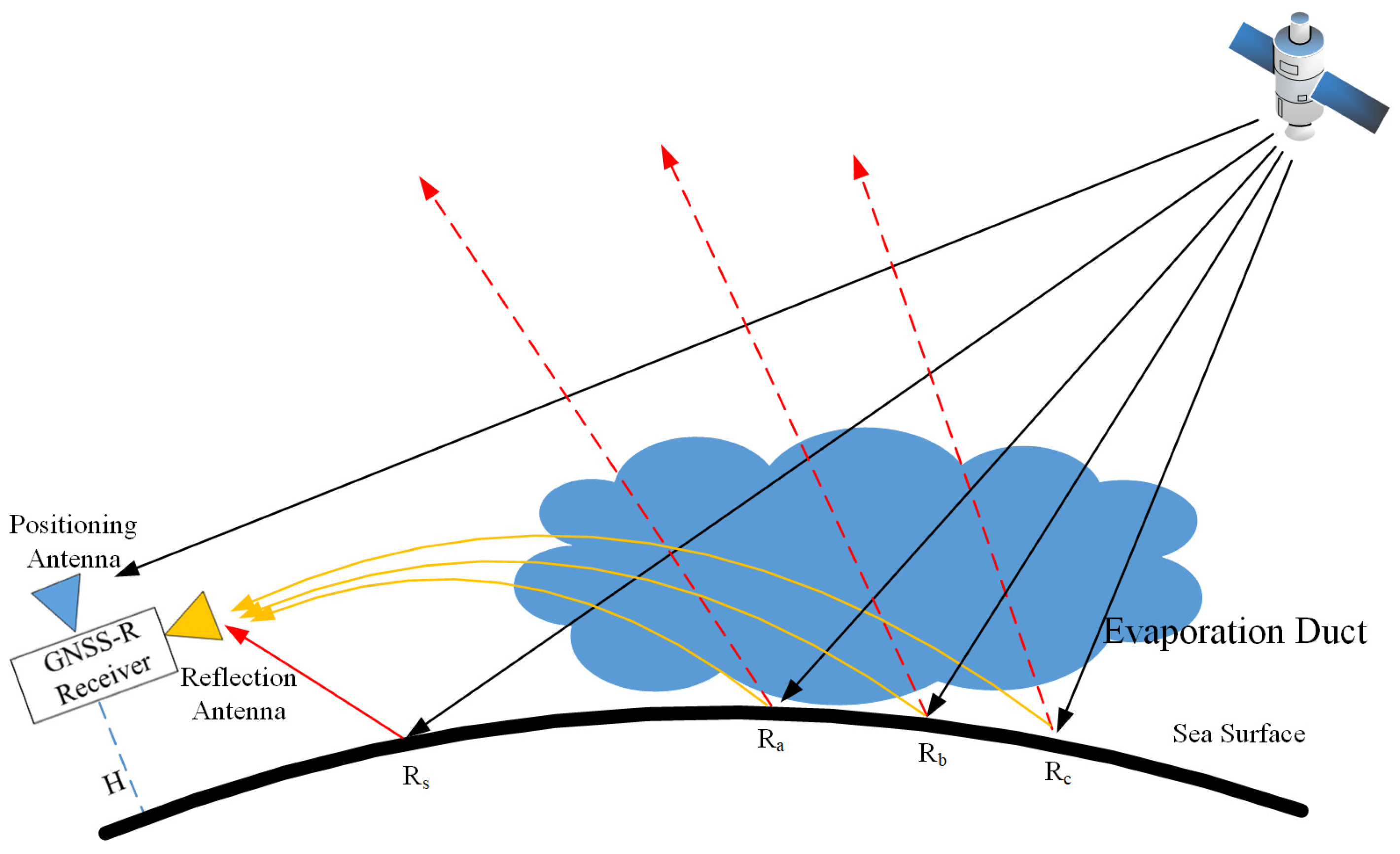
Figure 1 provides an illustration of the effect of an evaporation duct on GNSS-R observations. When GNSS signals are reflected by the sea surface, a portion of the signals undergo specular reflection, which can be modeled using optical principles, while the remaining signals are scattered randomly. Under normal atmospheric conditions over the sea, with a reflection antenna positioned on a coastal station or ship, only the reflected signal around the specular point (denoted as
) can be received. However, in the presence of an evaporation duct, additional reflected signals from the sea surface (denoted as
,
, and
), which would otherwise be unreachable under normal atmospheric conditions, can be received due to the refractive effect of the evaporation duct.
Based on the specified evaporation duct parameters, the atmospheric refractive index for each layer is computed by utilizing a spherical layered model. The receiver’s location is designated as the signal transmission source, from which light is emitted at various angles. The trajectory of each emitted light ray is simulated using a ray-tracing algorithm. When a specific light ray becomes tangent to the Earth’s surface, the point of tangency is identified as the maximum code delay [
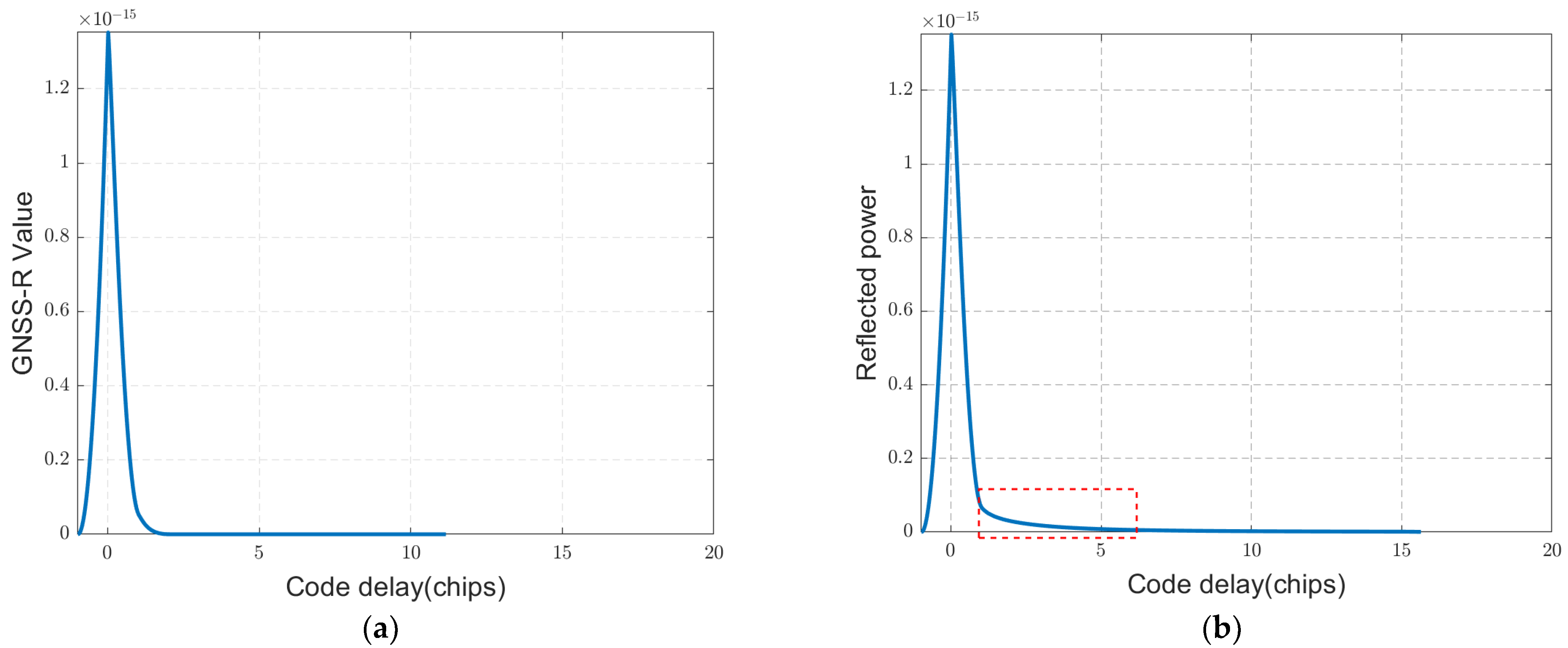
30]. Then, the reflection waveforms under normal atmospheric conditions and in the presence of an evaporation duct can be simulated using Formula (2), as shown in
Figure 2. Although the sea-surface conditions and evaporation duct parameters were simplified, the simulation results can still provide a theoretical framework. As demonstrated in
Figure 2, the evaporation duct causes reflection signals from
,
, and
to produce a distinct rising zone marked by a red rectangle in the DM.
It is worth noting that the theoretical simulation in
Figure 2 did not consider autocorrelation effects. Although the attenuation of the GNSS-R signals within an evaporation duct is lower than that in the normal atmosphere, only a portion of the scattered signal can be received due to the incidence angle. This results in the GNSS-R signal power outside the specular point being significantly weaker than that in the specular point itself. One of the most important challenges is that of detecting these weaker GNSS-R signals.
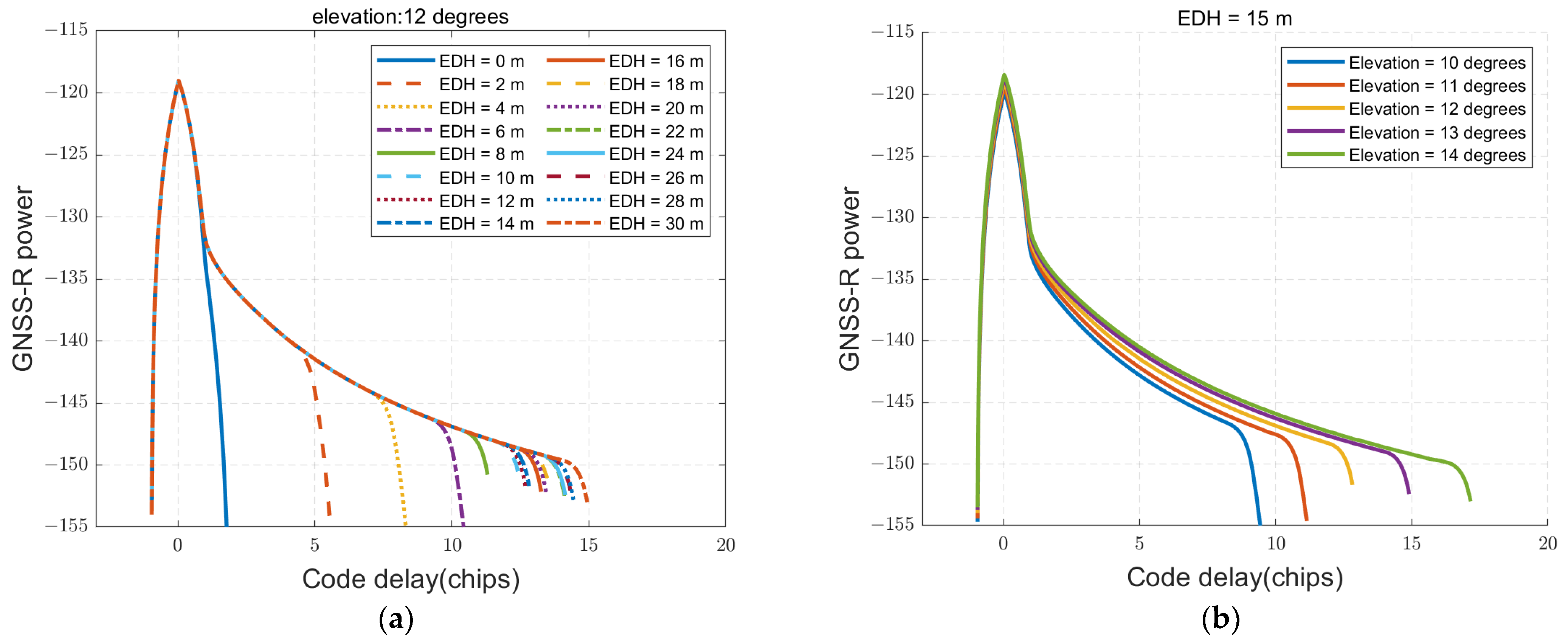
Through simulation studies, it was found that the range of the rising zone was closely related to the evaporation duct parameters, particularly the evaporation duct height and the elevation angle of the satellite corresponding to the received signal. As shown in
Figure 3, the range of the rising zone increases monotonically with both the evaporation duct height and the satellite elevation angle. The relationship between the code delay and evaporation duct height is nonlinear. As the evaporation duct height increases, the change in the code delay becomes less pronounced, leading to varying detection accuracies across different heights. Consequently, an optimal elevation observation range exists for engineering applications. The simulation results indicate that higher evaporation duct heights enable the reception of reflected signals over a broader range. However, as the reflection point moves farther from the receiver, the signal power diminishes due to increased propagation distance and greater power loss. When the evaporation duct height is particularly low, the code delay range of the received reflected signal is smaller, making it more discernible in the waveform. However, this smaller range is more susceptible to interference from other multipath signals. Conversely, if a multipath signal with a large code delay is consistently received, it is likely attributable to the evaporation duct. However, when the evaporation duct height exceeds a certain threshold, the reflection waveform changes become less distinct, making retrieval challenging. Therefore, until significant advancements are made in theory or engineering technology, there will remain a more suitable range for evaporation duct retrieval. If the range of the reflected signals can be accurately detected in the presence of an evaporation duct, the evaporation duct height can be inverted, as the elevation of the satellite can be precisely determined by the receiver. The functional relationship can be expressed as follows:
where
is the evaporation duct height (unit: m),
is the maximum code delay (unit: L1C/A code chip), and
is the elevation angle of the GNSS.
2.3. Semi-Physical Simulation
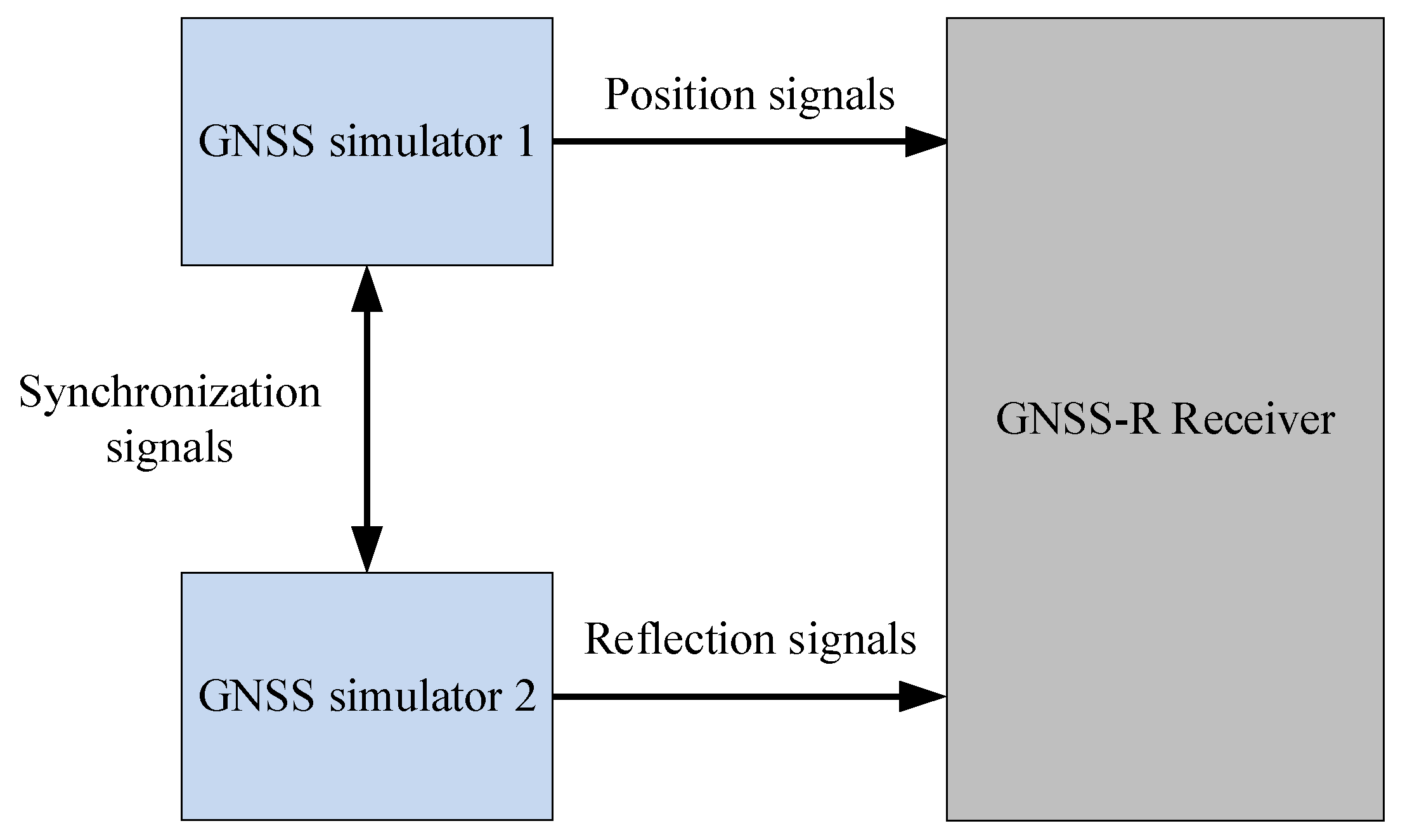
A GNSS simulator is a valuable tool for GNSS receiver development, as it can generate actual GNSS signals based on user-defined configurations. As illustrated in
Figure 4, at least two simulators are required for GNSS-R simulations: one to simulate the direct signal and the other to simulate the reflected signal. The reflected signal can be modeled as a combination of multiple multipath signals with varying delays [
26]. The connection between the simulators and the GNSS-R receiver is carefully configured to replicate real-world signal propagation conditions.
The semi-physical simulation builds upon the theoretical simulation. Initially, the maximum code delay is simulated theoretically under specified evaporation duct parameters. Subsequently, all reflected signals, ranging from the specular point to the maximum code delay, are discretized and simulated. For instance, discrete multipath signals are generated at equal intervals. Finally, the simulation interval is determined based on the number of multipath signals that the simulator can effectively replicate.
The GSS9000 is a multifunctional GNSS simulator capable of generating up to 16 channels of multipath signals. In our semi-physical simulation, the reflected GNSS signal is approximated using multipath signals with equal intervals of code delay. In particular, 16 multipath signals are simulated by the GSS9000 under both normal atmospheric conditions and evaporation duct scenarios, with GPS L1C/A signals being the primary focus. The resulting DMs received by the GNSS-R receiver are as follows.
As
Figure 5 shows, under normal atmospheric conditions, the DM data exhibit a main peak at the specular point, accompanied by minor autocorrelation peaks. In the presence of multipath signals, the DM of GPS displays an increase in signal power following the main peak. The semi-physical simulation results align closely with those of the theoretical simulation presented in
Figure 2. However, reflected signals outside the specular point are relatively weak, with the signal power being comparable to or even lower than that of the autocorrelation peaks. Additionally, GNSS reflection signals in non-specular regions interact with the autocorrelation peaks, leading to an increase in the amplitude of trailing autocorrelation peaks. It should be noted that autocorrelation affects DMs, so it is necessary to eliminate autocorrelation interference during data processing.
3. Experimental Design and Data Processing
3.1. Experimental Instruments
From the results described in
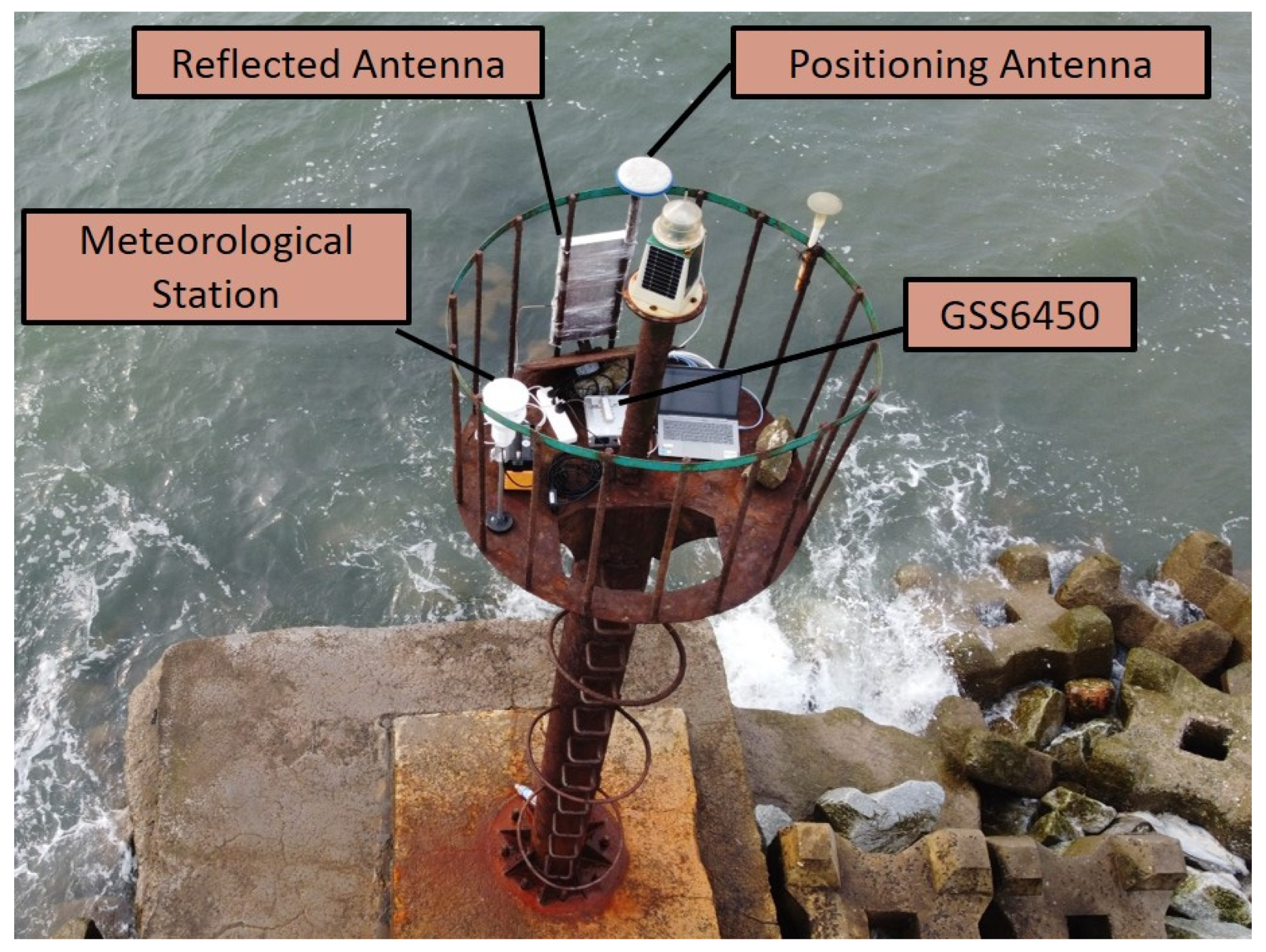
Section 2, it can be seen that it is possible to detect evaporation ducts using GNSS-R observations. To investigate the feasibility of this method, an experiment was conducted at a dock in Qinhuangdao, Hebei Province, China. An observation platform approximately 6 m above sea level was selected for the experiment. As shown in
Figure 6, a Right-Hand Circularly Polarized (RHCP) antenna (National Space Science Center, Chinese Academy of Sciences (NSSC/CAS), Beijing, China) was installed to capture direct GNSS signals (referred to as position signals), while a Left-Hand Circularly Polarized (LHCP) antenna (NSSC/CAS, Beijing, China) was positioned parallel to the sea surface to collect scattered GNSS signals (referred to as reflection signals). It is well known that reflection signals are generally weaker than direct signals, and signals reflected from non-specular points are even weaker due to increased transmission losses over longer distances. Therefore, antenna gain played a critical role in determining the quality of the experimental results. The LHCP antenna used in this experiment was a high-gain antenna, providing over 10 dB of gain within a horizontal range of ±20 degrees. The GNSS receiver used in the experiment was a commercial software receiver, the GSS6450 (Spirent Communications plc, Paignton, the United Kingdom), capable of simultaneously recording both position and reflection signals. The receiver was configured with a sampling bit width of 8 bits and a bandwidth of 30 MHz.
The positioning antenna captured data stored in the 6450 positioning channel, while the reflecting antenna captured data stored in the 6450 reflecting channel. After completing the outdoor experiment, the data recorded by GSS6450 were utilized as the signal source. This process introduced some losses during sampling and output. These data were then processed by a hardware receiver developed by the NSSC/CAS. This receiver was capable of simultaneously processing reflection signals from BDS B1C, GPS L1C/A, and GALILEO E1. It operated with a code resolution of 1/4 chip and a delay range of [−6, 26] chips. The receiver processed the positioning signal to determine the position, calculated the elevation of the GPS satellite, and predicted the reflecting satellite based on the positioning results. Subsequently, the receiver’s reflection channel computed the code delay and Doppler delay of the specular point. Using these calculations, the receiver correlated the reflected signal to obtain the reflected DM data, which were then further processed.
3.2. Acquisition of Data for Evaporation Duct Comparison
As illustrated in
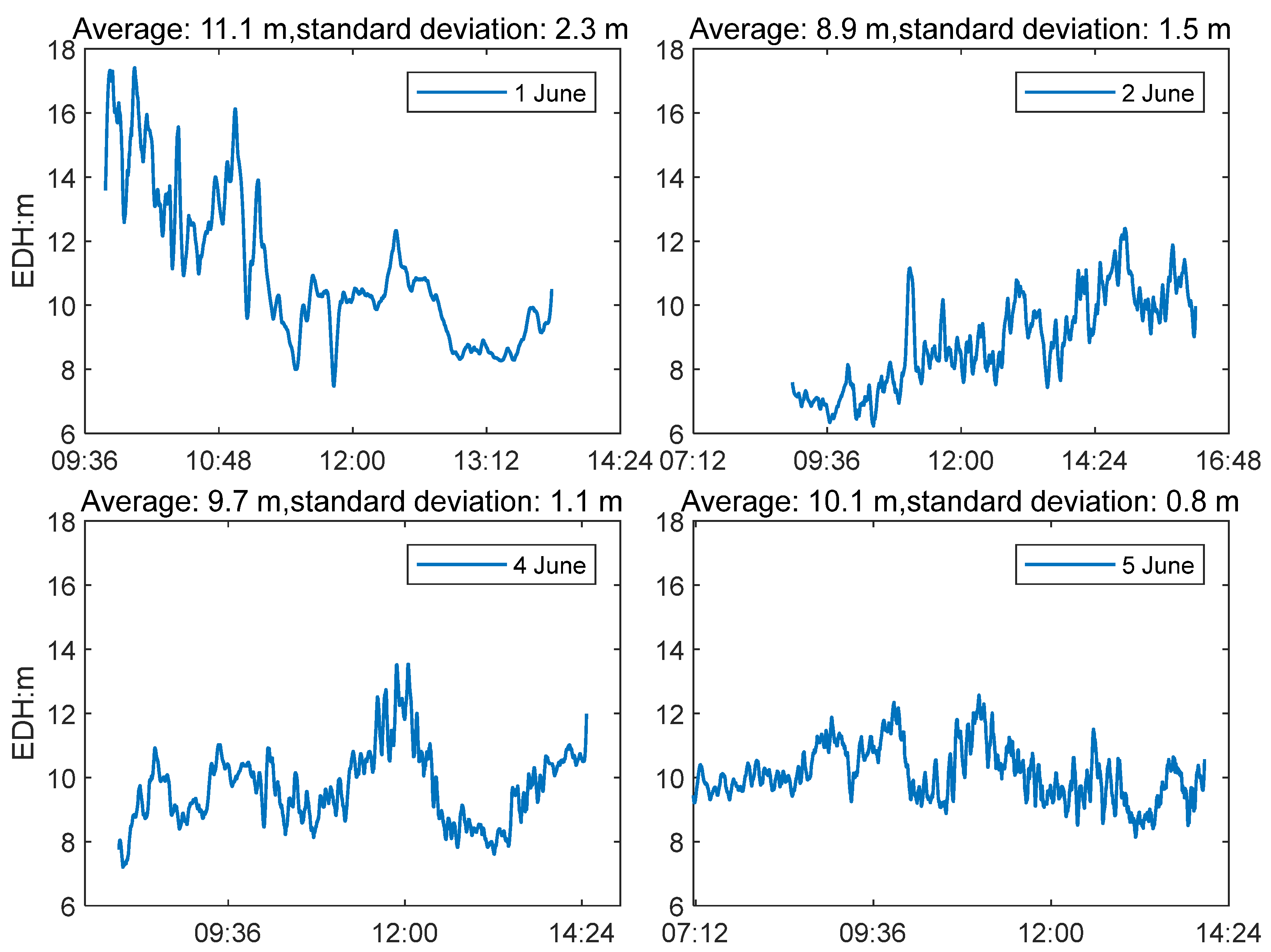
Figure 6, the test platform was equipped with an automatic meteorological station capable of providing atmospheric parameters, including air temperature, humidity, wind speed, and atmospheric pressure, at an update rate of 1 Hz. The actual height of the evaporation duct was estimated using the PJ model, a widely recognized prediction model initially proposed by Jeske in 1973 [
31] and later modified by Paulus in 1985 [
32]. The PJ model is considered to be one of the most widely used in the world, primarily due to its simplicity and efficiency in calculation. The PJ model operates under the assumption that air parameters are measured at a height of 6 m and that the atmospheric pressure is 1000 hPa. The specific calculation steps are provided in
Appendix A, while the detailed derivation process can be found in the referenced literature [
31,
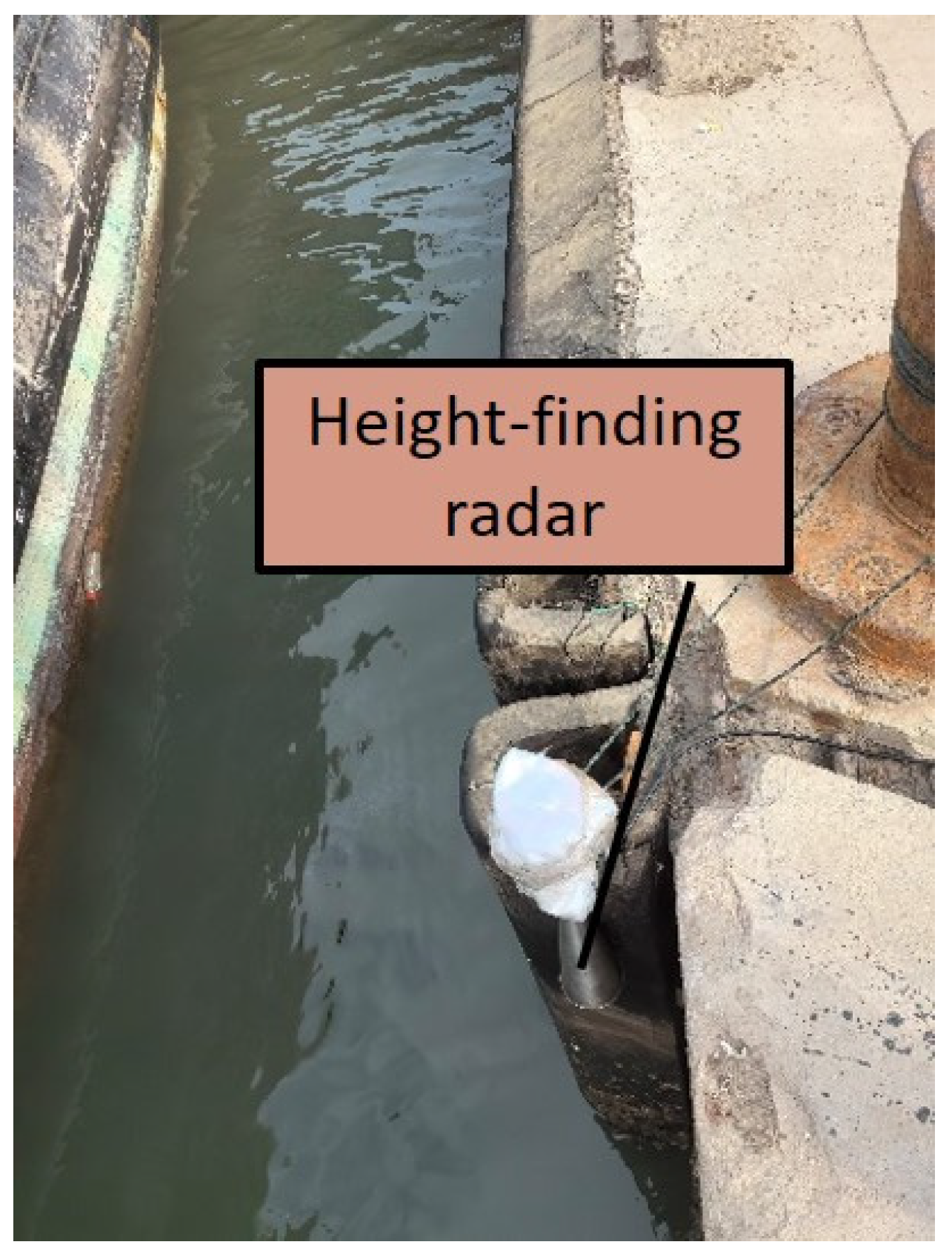
32]. To adapt the model to this experiment, the sea-surface height was incorporated as a parameter. A radar system was installed at the dock to continuously monitor the distance between the sea surface and the platform’s base, as shown in
Figure 7.
During the experiment, the distance between the sea surface and the platform base varied from 0.51 m to 1.45 m. The automatic meteorological station was positioned at a height of 4.76 m from the base of the platform. This configuration placed the automatic meteorological station at an approximate altitude of 6 m above the sea surface, thereby rendering the PJ model applicable within the experimental framework. However, it should be noted that the PJ model requires sea-surface temperature (SST) as an input parameter, in addition to air parameters. For this experiment, SST data from ERA5 of the European Center for Medium-Range Weather Forecasts (ECMWF) were utilized, despite the acknowledgment that employing SST from ECMWF may lead to an underestimation of the EDH [
33]. Nevertheless, utilizing SST from ECMWF remains a valuable approach for EDH estimation.
3.3. Incoherent Integration
In order to estimate GNSS scintillation and improve the signal-to-noise ratio (SNR), incoherent integration is a necessary step in processing DM data, in addition to coherent integration. In a typical GNSS-R receiver, the incoherent integration time is typically 1 s. However, considering the weak GNSS-R signals outside of the specular point, a longer incoherent integration time may be more effective.
A GNSS signal can be described as follows:
where
is the amplitude of the GNSS signal,
is the power of the signal, and
and
are the frequency and time of the signal, respectively.
Thus, all scattered signals contribute to the final received signals. In other words, each signal acts as a multipath signal for the selected signal, and the final signal can be described as follows [
34]:
where
is the attenuation coefficient of multipath signal,
is the multipath number,
is the delay of the multipath to the selected signal,
is the phase change in the multipath to the selected signal, and
is the total noise.
In
incoherent integrations, Equation (6) is rewritten as follows:
All of the scattered signals contribute to the final signal in this way. Incoherent integration reduces the influence of noise.
For most GNSS-R receivers, the coherent time is generally less than 20 ms due to the length of the navigation message. In this study, we use a 10 ms coherent time to increase the reflected signal power. The total gain of a receiver
can be described as follows:
where
is the gain of coherent integration, and
is the gain of incoherent integration.
The power of the reflected signal is typically weaker than that of the direct signal due to energy loss during sea-surface reflection and the longer propagation distance, which further attenuates the signal. The power gain achieved through coherent integration can be expressed as follows:
where
is the noise bandwidth, and
is the coherent time. If
and
are 2 MHz and 10 ms, respectively, then
is about 43 dB.
Incoherent integration can enhance signal power without significantly increasing the computational complexity, but incoherent integration can introduce square loss
. The considered square loss can be written as follows:
where
is the time of incoherent integration, and
is the square loss.
To estimate the best time for incoherent integration, the reflected signal power must be accurately estimated. However, this is almost impossible, as the sea surface and the evaporation duct conditions are unknown. If a higher SNR is expected, more incoherent time is required.
3.4. Autocorrelation Elimination
In an evaporation duct environment, scattered signals from non-specular points can be received by a GNSS-R receiver, but their power is attenuated due to the limited field of view of the antenna and the increased propagation distance. As is well known, GNSS signal strength is lower than noise, thus requiring correlation techniques for detection. Similarly, GNSS-R signals are generally weaker than direct GNSS signals. While the evaporation duct environment enhances the reception of GNSS-R signals, their strength remains close to the autocorrelation noise level. In other words, autocorrelation is a major obstacle to the detection of evaporation ducts using GNSS-R.
Although there is a proportional relationship between main peaks and autocorrelation peaks, this method can partially remove autocorrelation interference [
35]. Fortunately, the position of the autocorrelation peak is fixed, and it can be used to eliminate autocorrelation interference.
5. Discussion
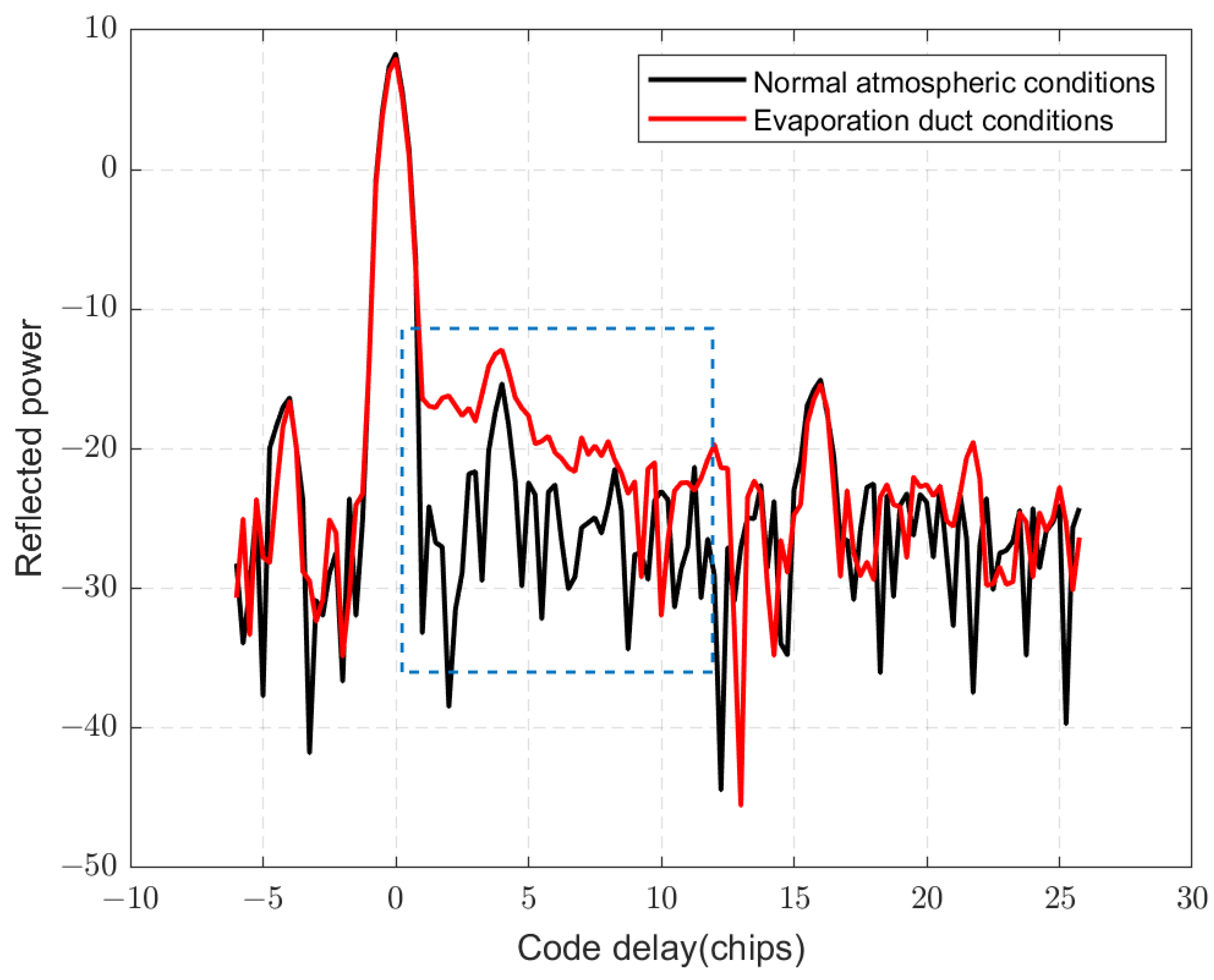
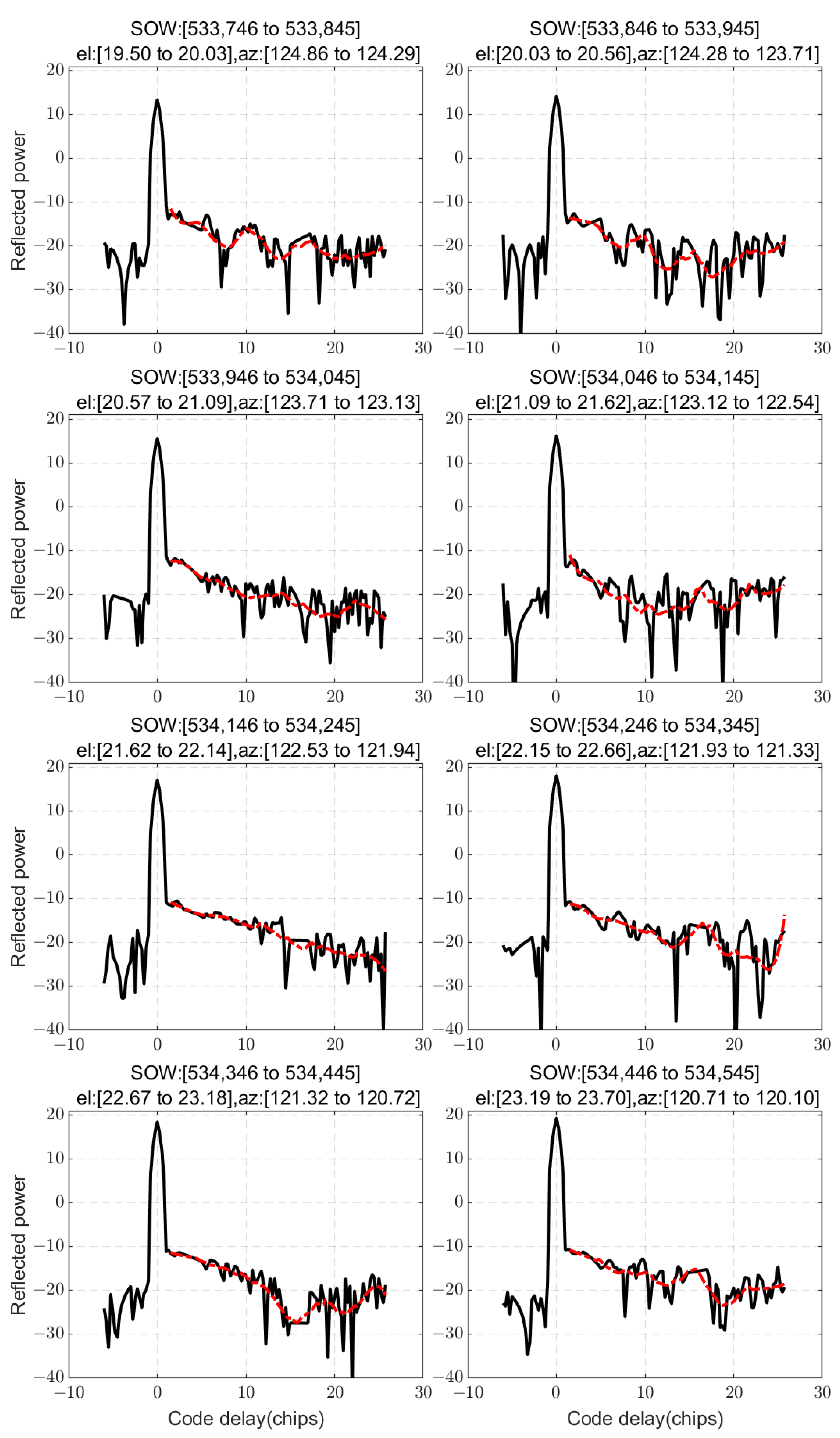
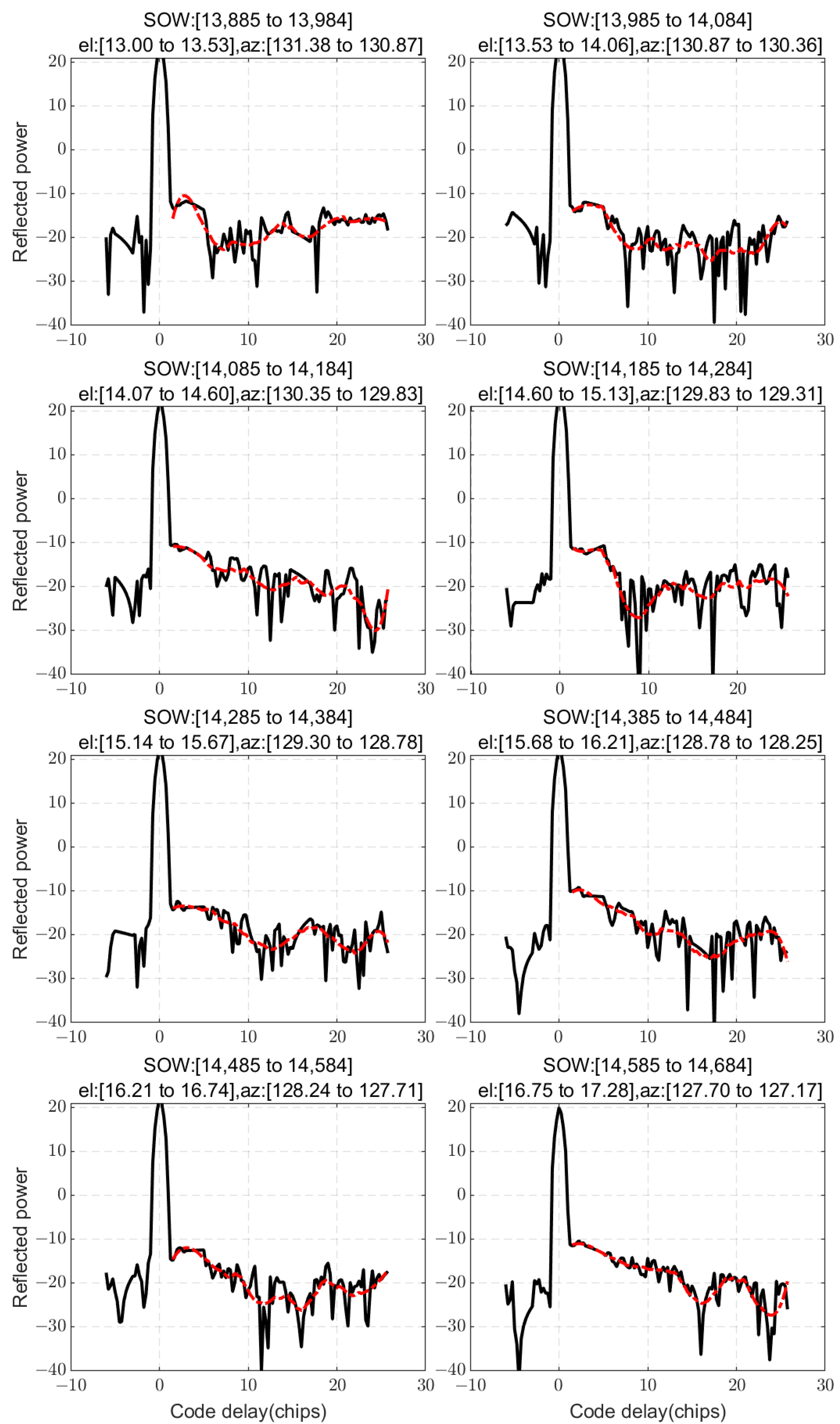
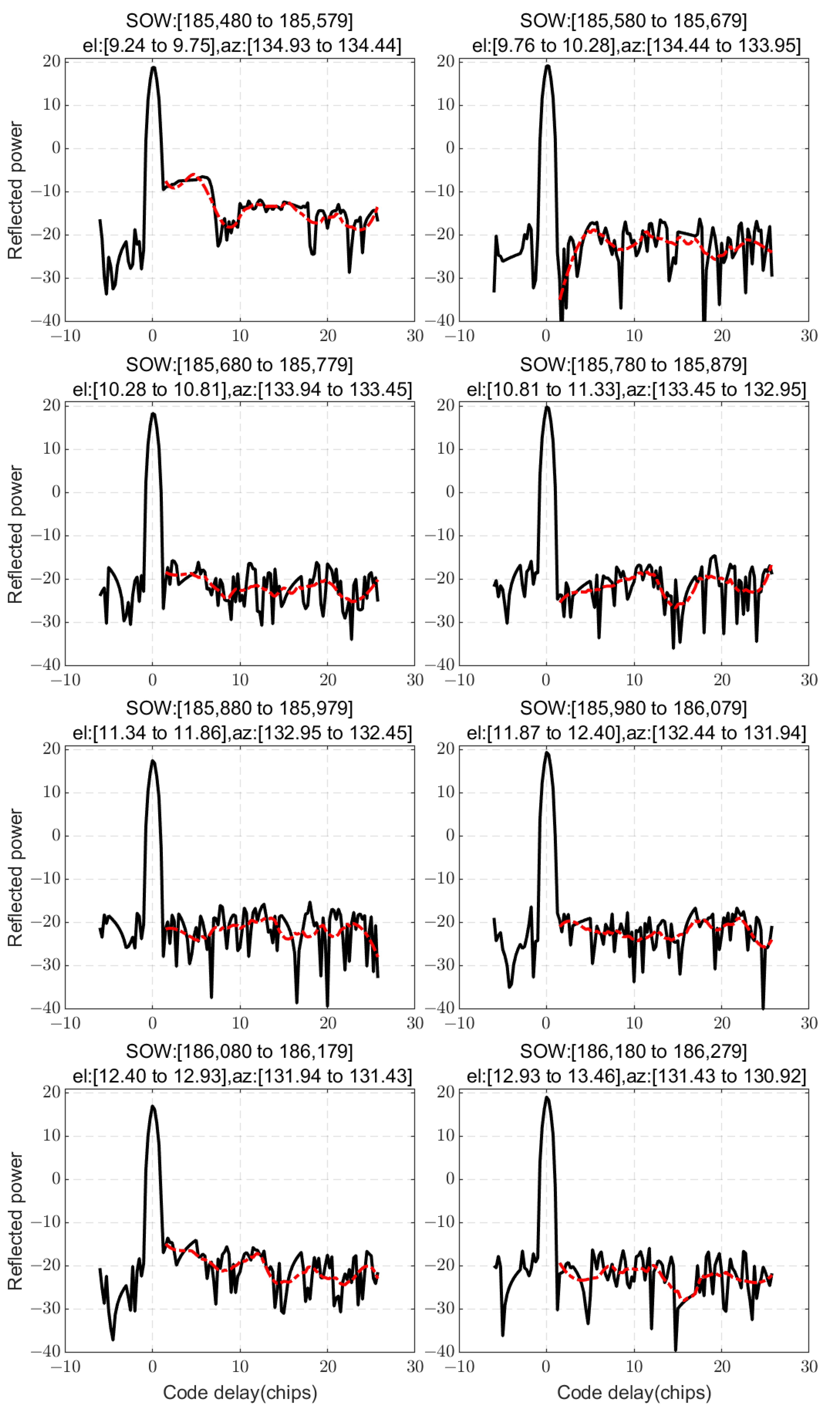
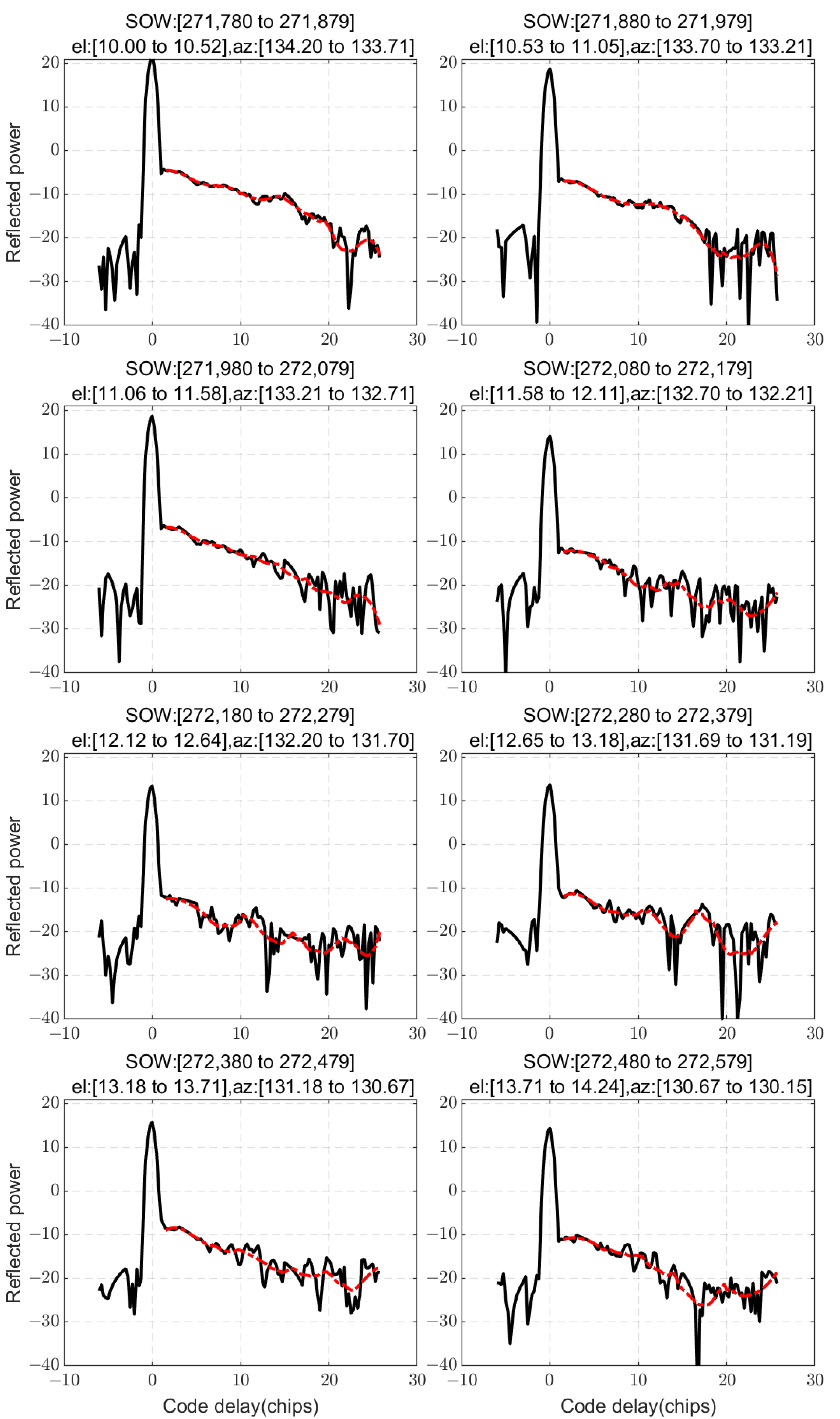
An evaporation duct causes the atmospheric refractive index to exceed the curvature of the Earth, thereby altering the propagation trajectory of electromagnetic waves. Consequently, when a reflected GNSS signal passes through an evaporation duct region, the propagation path of the reflected GNSS signal will be changed, enabling signals that are beyond the line-of-sight transmission range in a standard atmospheric environment to reach the reflecting antenna and be received by the GNSS-R receiver. This phenomenon is evident in GNSS-R DMs, where the presence of an evaporation duct induces a noticeable rise in DMs. Therefore, GNSS-R has potential for the retrieval of evaporation ducts, and this study mainly demonstrates this possibility.
In this study, through a theoretical simulation, semi-physical simulation, and experiment, a rise in DMs in the presence of evaporation ducts is demonstrated. The theoretical simulation results demonstrate a monotonic relationship between the EDH and the maximum code delay in the rising region of the reflection waveform. This relationship enables the retrieval of GNSS-R DMs by leveraging this correspondence along with other relevant parameters. The semi-physical simulation results demonstrate that the autocorrelation peak position aligns with theoretical calculations, confirming the reliability of this approach. Compared to purely theoretical simulations, semi-physical simulations can more accurately replicate complex real-world factors such as random noise, thereby generating signals that better approximate actual environmental conditions. Furthermore, the experimental results, supported by the PJ model, demonstrated that the reflected DMs rose in non-specular points when there was an evaporation duct. The reflected DM waveform exhibited multiple instances of rising, providing empirical evidence of a direct correlation between the evaporation duct phenomenon and the observed rise in reflection waveforms.
It is very important and necessary to use GNSS-R signals for inversion. However, due to the limited antenna gain employed in the experiment, only one theoretically feasible retrieval method can be proposed at this stage. The preliminary retrieval of EDH was achieved using DMs from GPS PRN9 in an experimental dataset under the assumption that all signals can be received and detected. Nevertheless, accurate retrieval necessitates additional data and a more comprehensive theoretical model. When all reflected waveforms can be reliably detected above the noise floor, this method may be a considerable potential method.
It should be noted that the simulation model of the reflection signal used in evaporation ducts only considers the evaporation duct height. The strength of the evaporation duct and its complex structure must also be investigated in the future to obtain more accurate retrieval results.
In this work, the signal was recorded in a data recording instrument and subsequently reprocessed by a hardware receiver, resulting in a power loss in the GPS L1C/A signal power in both the direct and reflected paths. Although this power loss can be disregarded for positioning purposes, it represents a significant source of interference for the reflection signal, as the power of the reflection signal propagating through the evaporation duct is weak and within a similar range of autocorrelation. Subsequently, by optimizing the algorithm and improving the hardware receiver, DMs can be collected directly.
The reference evaporation duct data derived from the PJ model were influenced by several factors, such as the accuracy of the meteorological data. We tested the air parameters on a platform on the coast, which could be different from real evaporation duct conditions over the sea surface, and a more precise reference is required in future work.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}