

Noise Radar Waveform Design Using Evolutionary Algorithms and Negentropy Constraint


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Low mutual interference (MI): when different radars coexist in a limited environment and frequency band, interference among them may occur. In NRT, this is mitigated due to each radar perceiving the others’ signals as noise [7];
- High immunity to jamming: noise radar waveforms are harder to identify. Since jamming can be made by creating deceptive false targets or injecting a signal to cancel the transmitted one, there is a need to know the transmitted waveform. This is harder to achieve if there are no signal libraries available or the transmitted signal is (or looks) random.
2. Design and Challenges of Noise Radar Waveforms
2.1. Noise Radar Waveforms and Challenges
- The ACF is a fundamental concept when designing radar waveforms, specifically because it permits the performance analysis of the correlation receiver—the preferred method to estimate target position and velocity [10]. The ACF measures the similarity between a signal and a delayed version thereof as a function of the delay:where m is the delay and N is the total number of samples. A non-deterministic signal has unpredictable variations in amplitude and phase, which contributes to fluctuations in the ACF, influencing its behavior and shape. Therefore, it is essential to implement sidelobe suppression techniques for enhancing the overall performance and reliability of radar systems. Moreover, peak-to-sidelobe level (PSL) is usually used as a metric to define the ratio of the amplitude of the main lobe to the amplitude of the highest sidelobe of the ACF. In NRT, the PSL can be estimated as:where B is the bandwidth, T is the waveforms’ time duration and K is a constant depending on the PRNG distribution usually taking values between 10 and 12 dB [9].
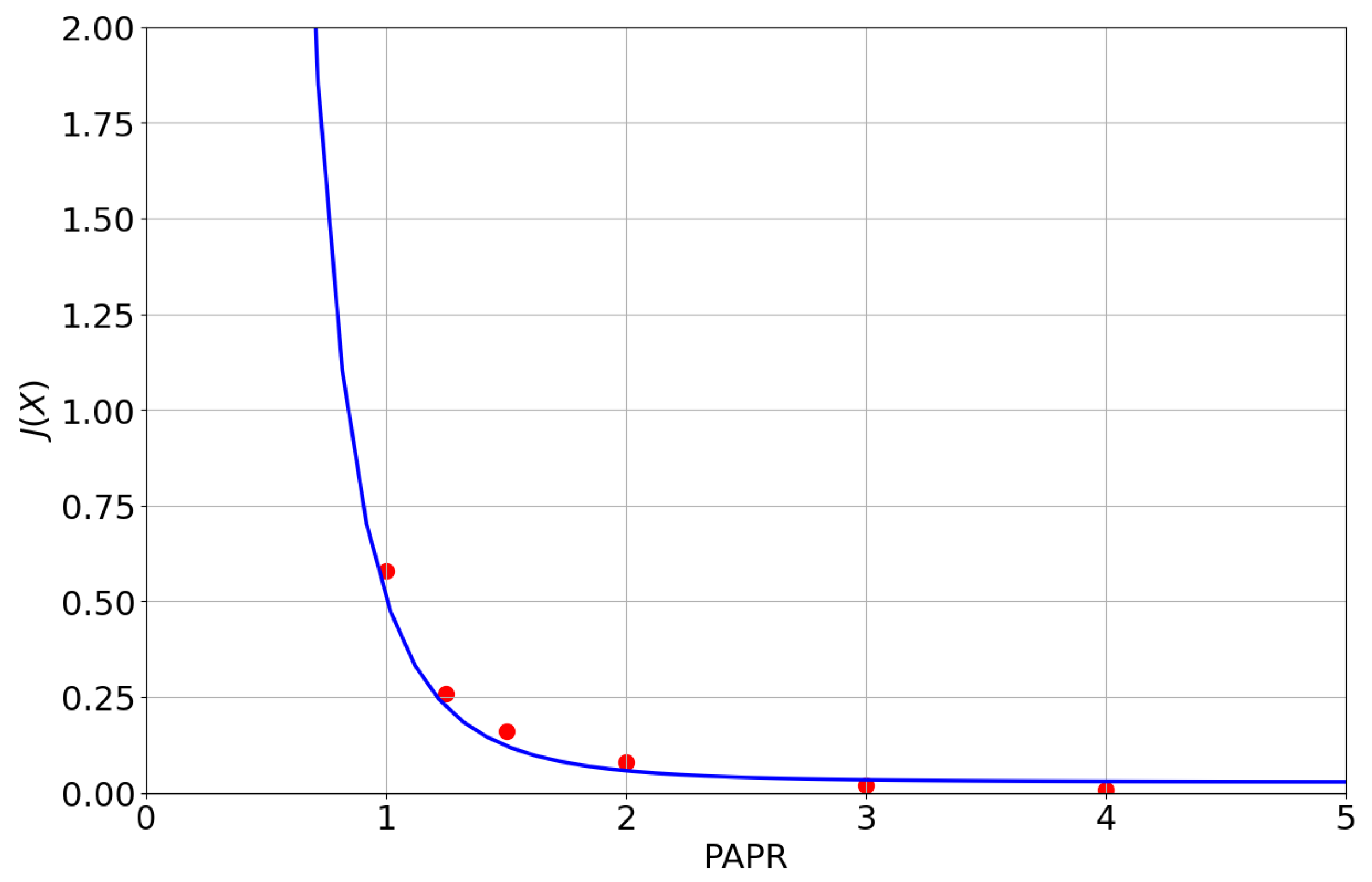
- The randomness of the envelope may cause the transmitter to experience a decline in efficiency: higher peaks when compared to the average power of the envelope lead to lower transmitter performance. Thus, PAPR is used to optimize these waveforms.where is the discrete version of the complex envelope, which is usually defined as a complex exponential , B is the bandwidth, and N is the number of samples, which is the product of the sampling frequency and the integration time: . Figure 1 illustrates how a high PAPR affects SNR [9]; ideally, we want PAPR close to 1.
2.2. NRT Waveform Design
2.3. Noise Radar Recognition
2.4. Waveform Entropy
3. Multi-Objective Optimization Problem Formulation
4. Algorithm Description
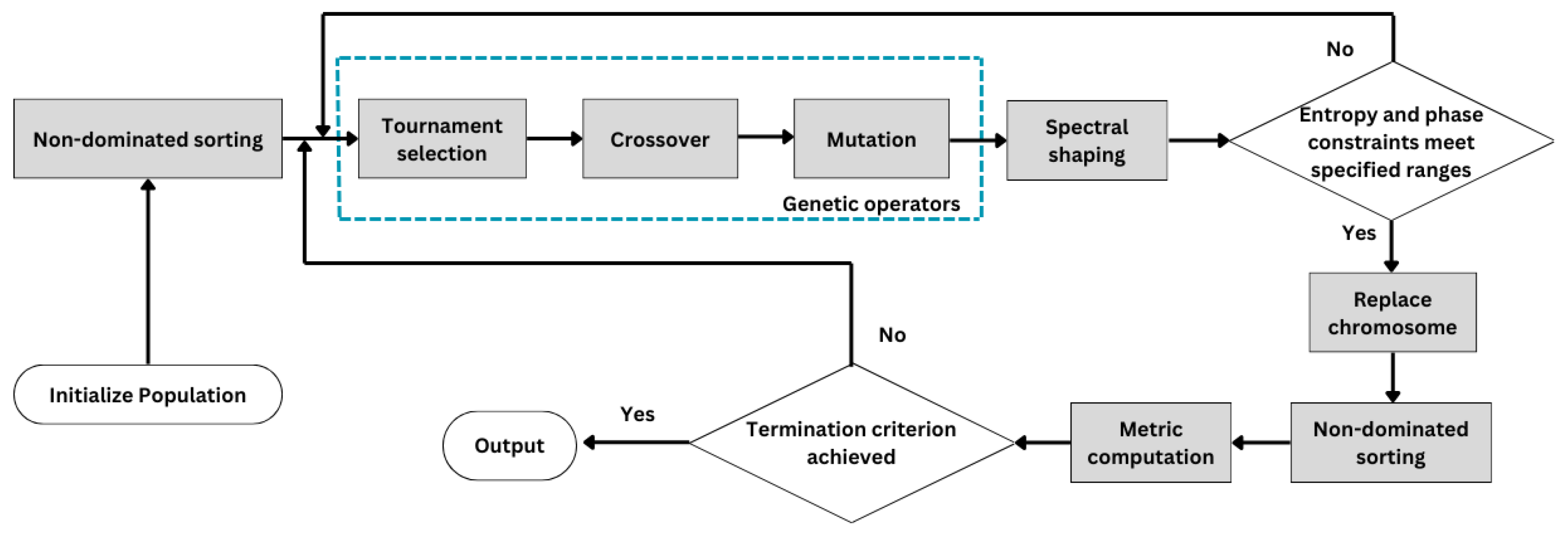
SS-NSGA Description
5. Experiments
5.1. Experiment Design
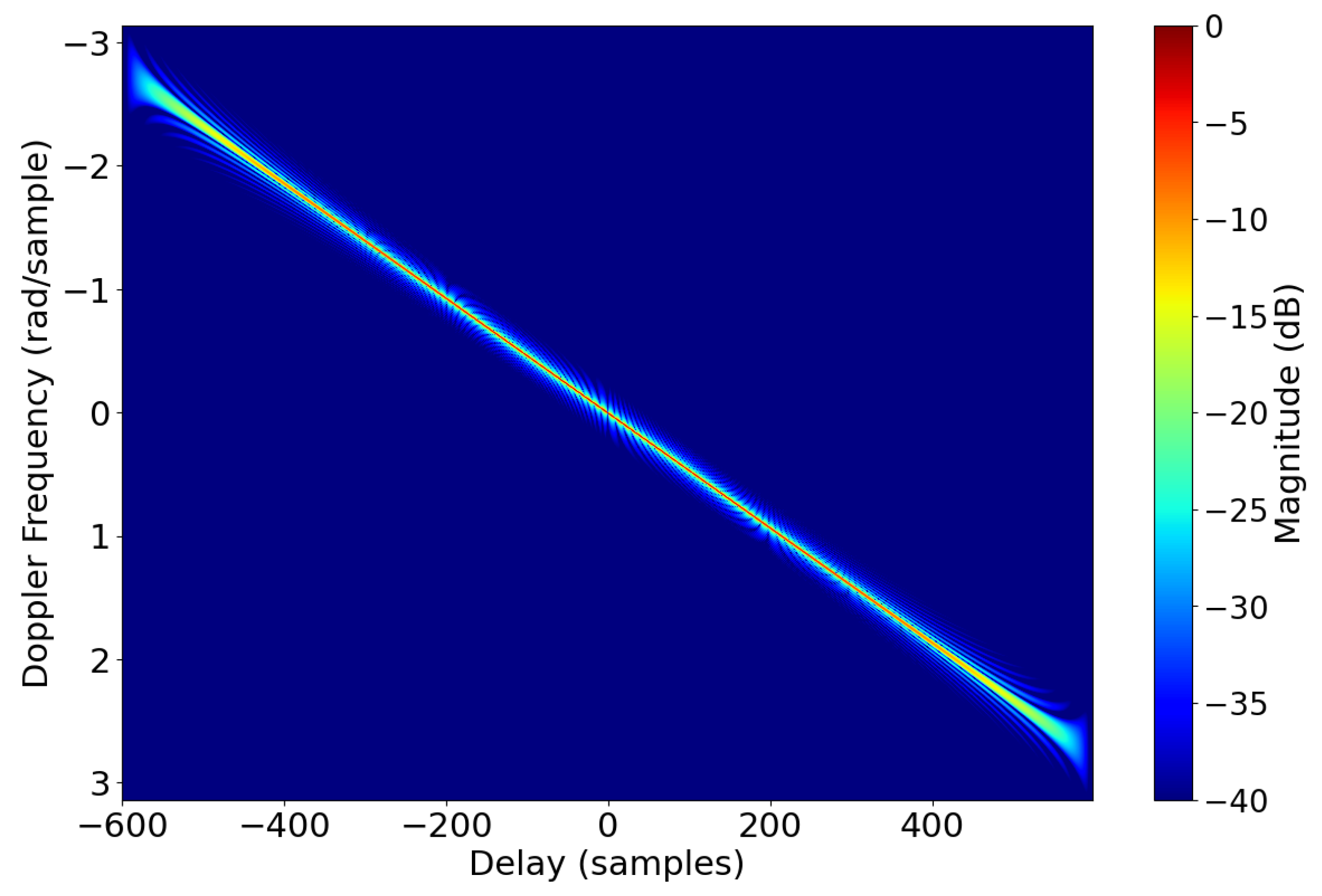
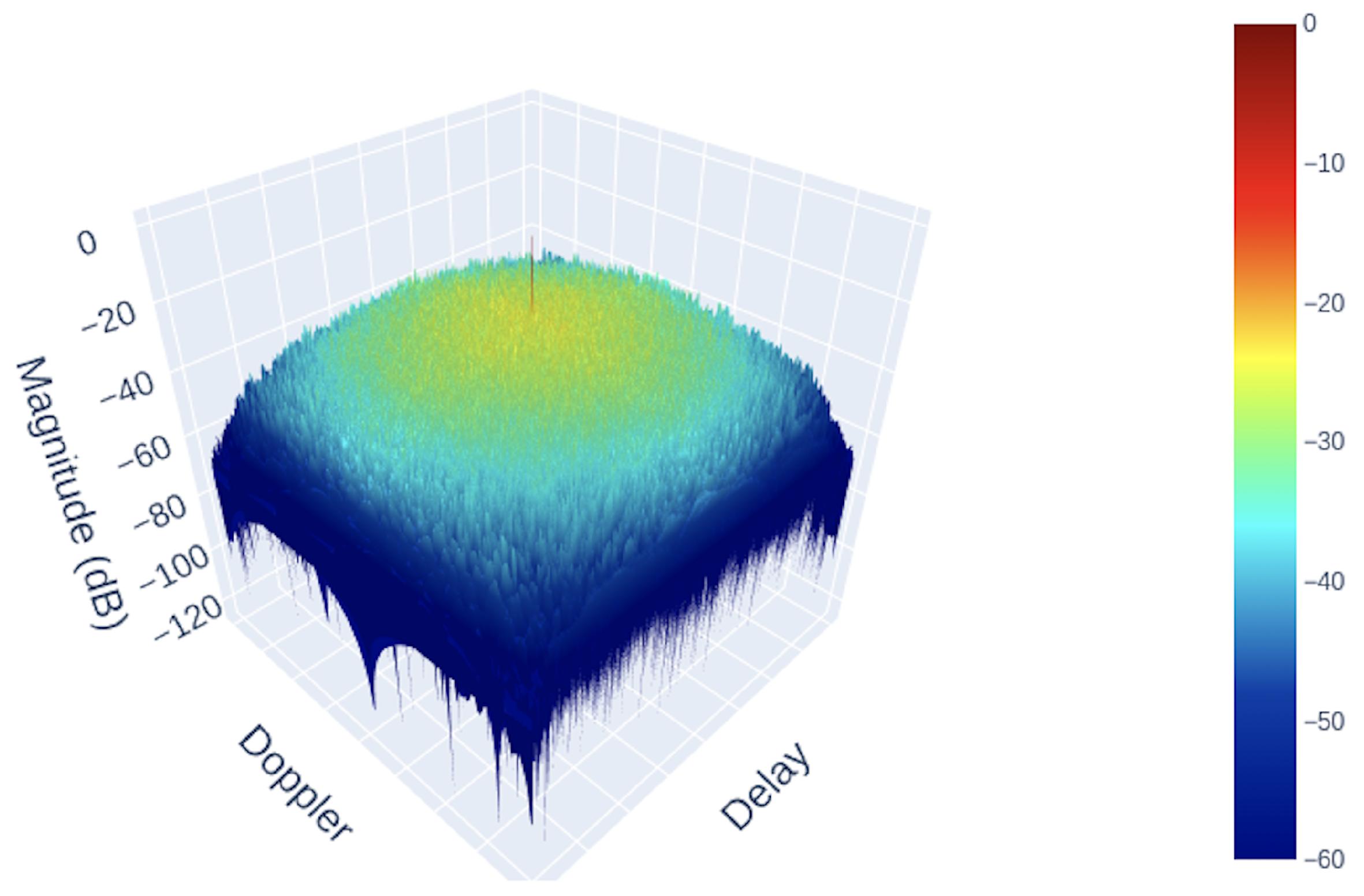
- First, the problem is solved subject to Equation (15), reaching a set of Pareto optimal solutions and plotting its AF;
- Then, the problem is solved as described in Equation (17). Negentropy is set to a set of values and a new metric is presented as a function of the chosen negentropy. This metric is chosen particularly by scaling PAPR up, since the values of the ISL typically register one decimal place higher.
5.2. Results
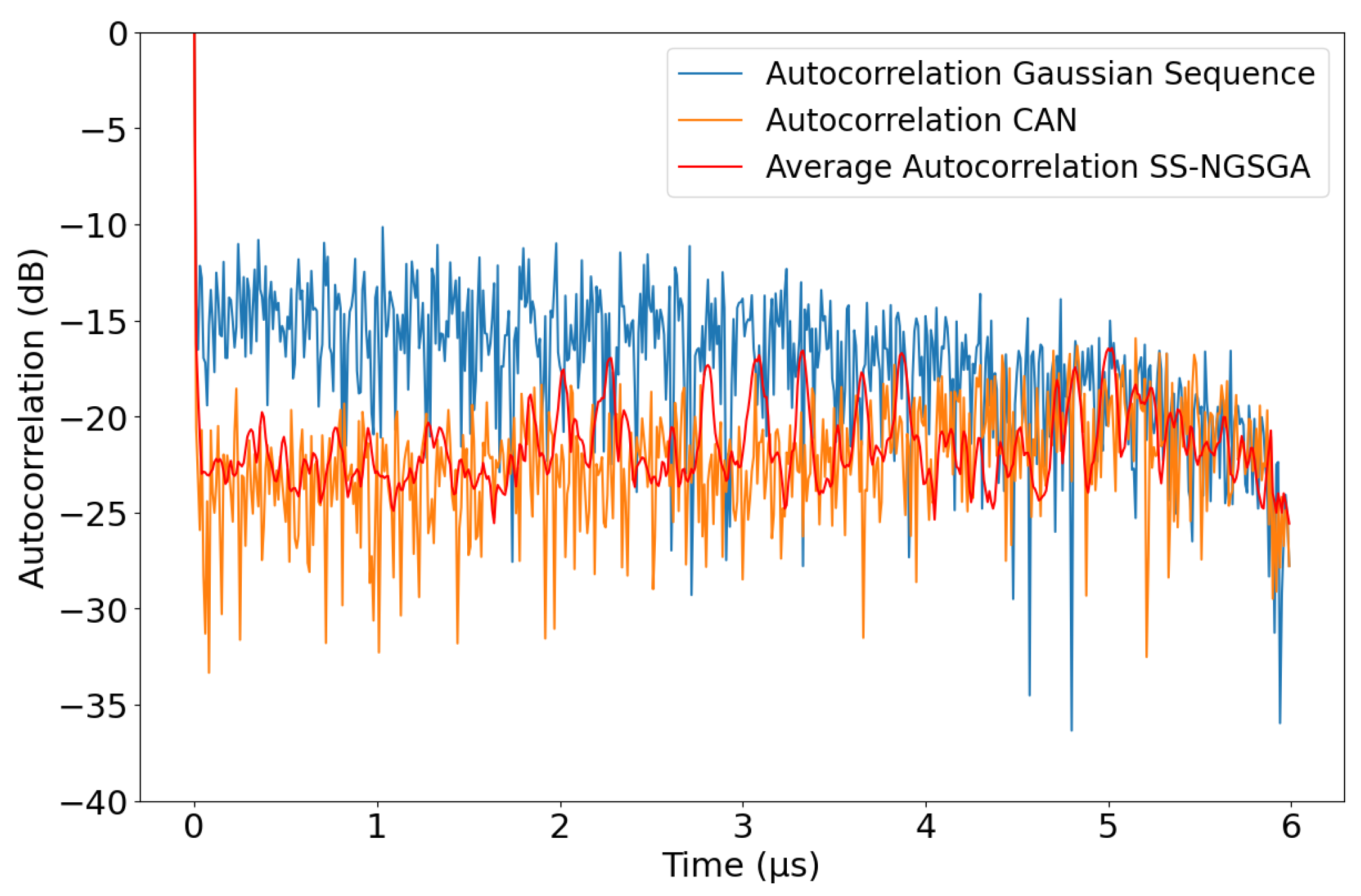
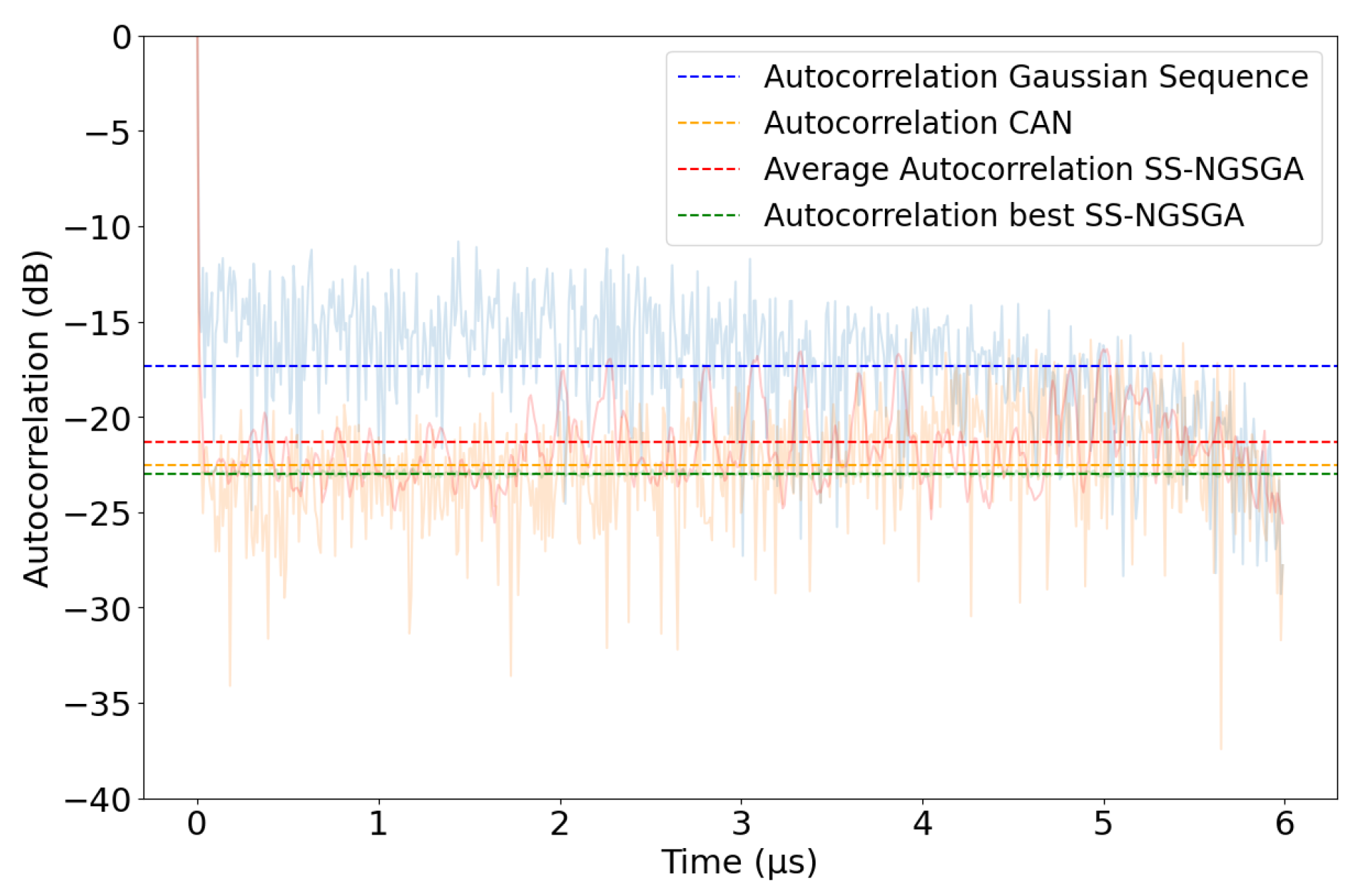
- BLASA [12] exhibits performance comparable to CAN regarding sidelobe level of the ACF. Consequently, our best solution may outperform the latter algorithm by approximately 1 dB (see Figure 8). However, the LPI properties of BLASA, and by this we mean the time–frequency representation, are closer to Gaussian noise than our algorithm without any constraints.
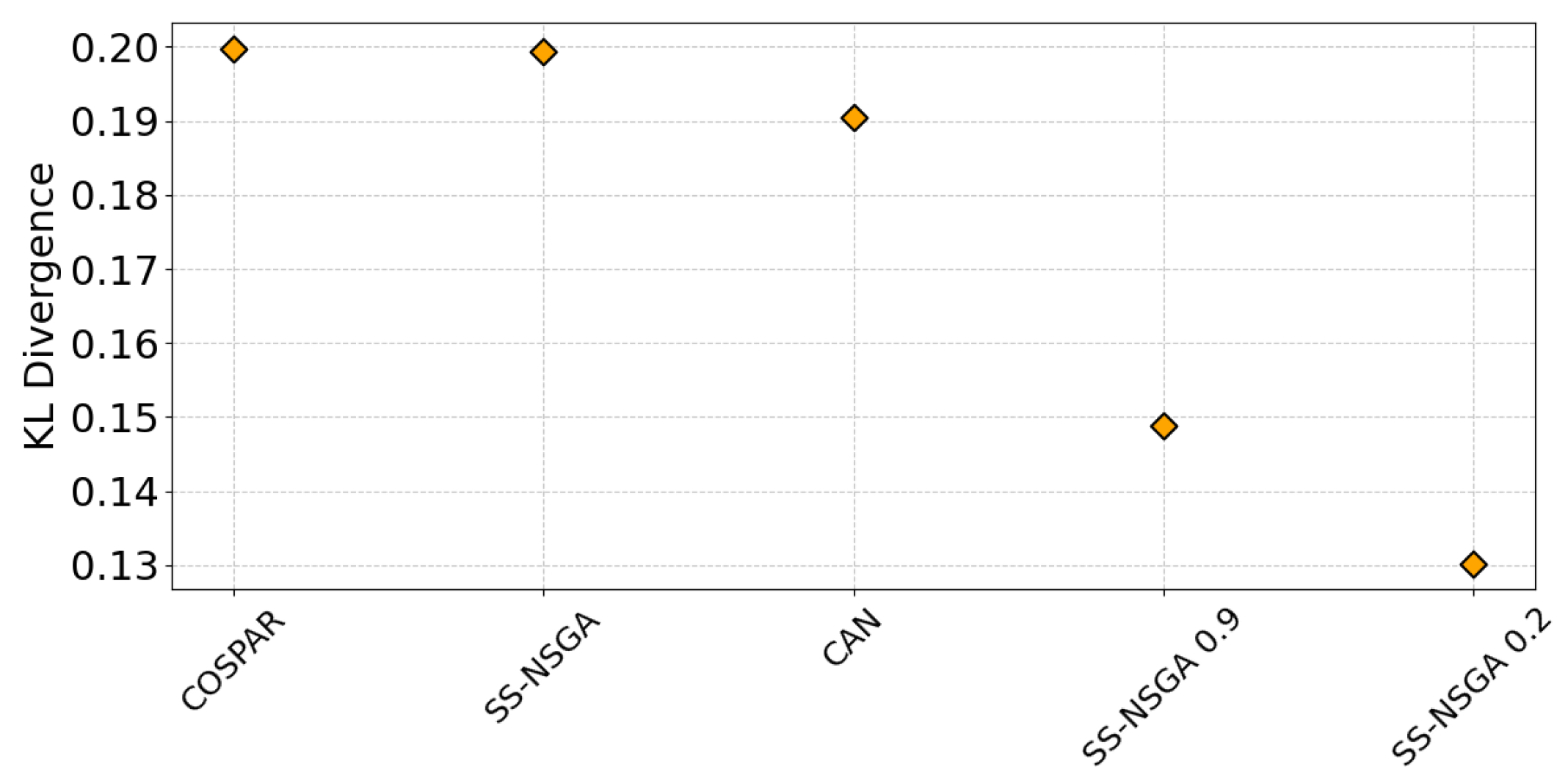
- COSPAR [13] performs better than our algorithm for the same PAPR, where for a fixed time–bandwidth product, the values depend on the chosen sidelobe level of the Taylor window. However, besides COSPAR achieving a great value of spectral kurtosis, which is a way to detect noise radar synthesized waveforms, our algorithm allows for time–frequency representation that is closer to a Gaussian distribution.
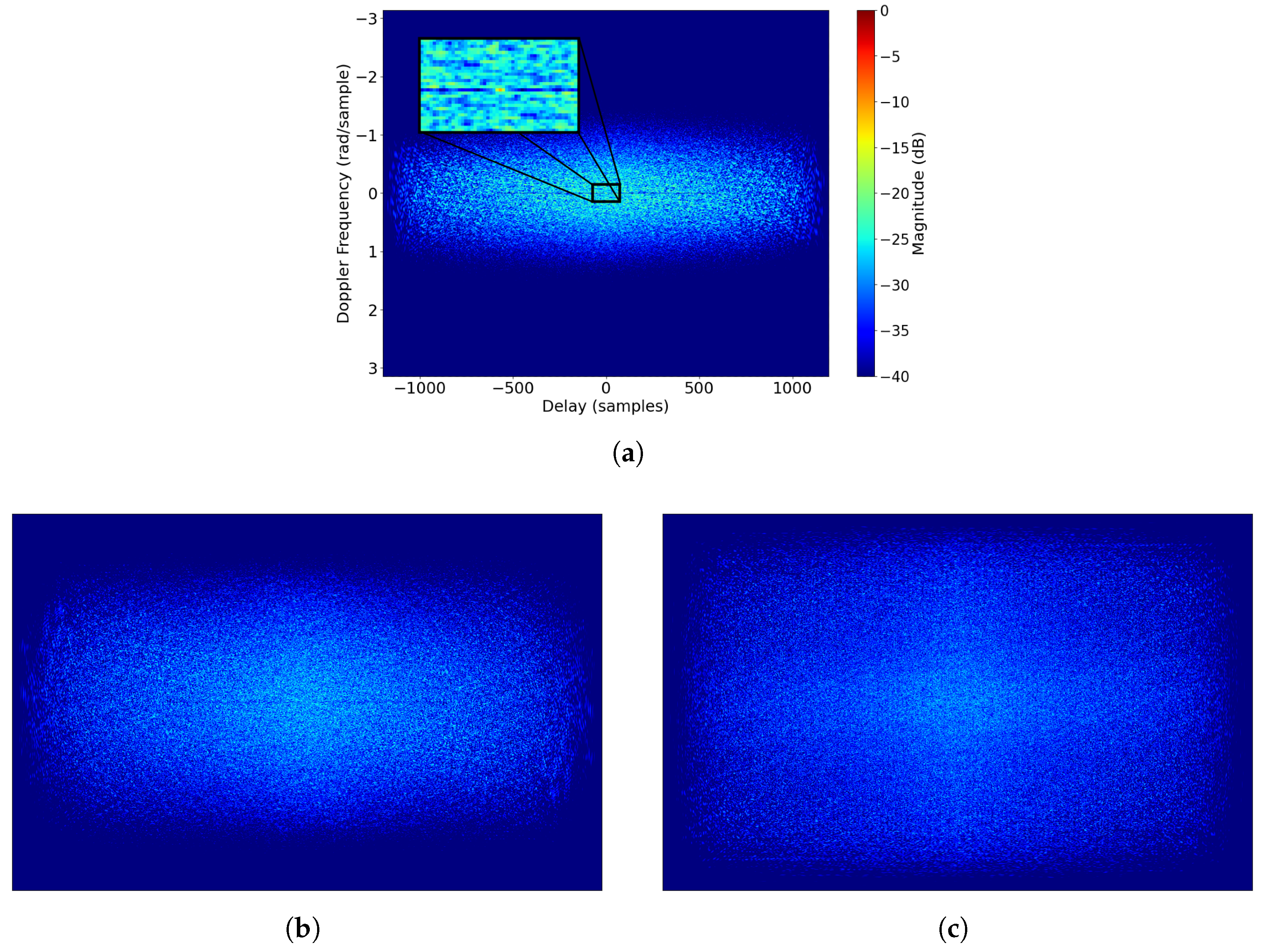
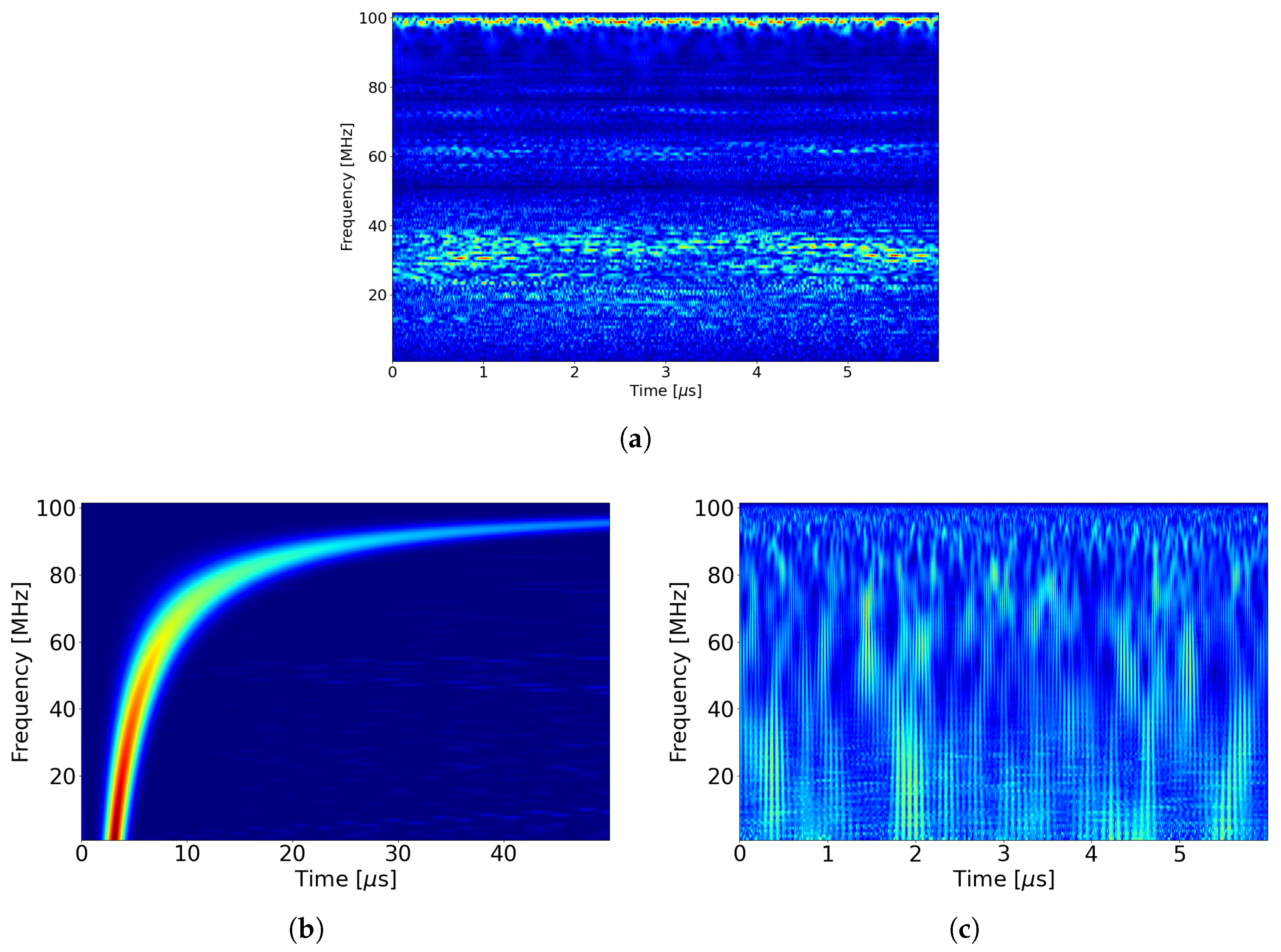
5.3. Time–Frequency Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ankel, M.; Jonsson, R.; Bryllert, T.; Ulander, L.M.H.; Delsing, P. Bistatic noise radar: Demonstration of correlation noise suppression. IET Radar Sonar Navig. 2023, 17, 351–361. [Google Scholar] [CrossRef]
- Lai, C.P.; Narayanan, R.M. Ultrawideband Random Noise Radar Design for Through-Wall Surveillance. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1716–1730. [Google Scholar] [CrossRef]
- Meller, M.; Tujaka, S. Processing of Noise Radar Waveforms using Block Least Mean Squares Algorithm. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 749–761. [Google Scholar] [CrossRef]
- Sénica, A.L.; Marques, P.A.C.; Figueiredo, M.A.T. Artificial Intelligence Applications in Noise Radar Technology. IET Radar Sonar Navig. 2024, 18, 986–1001. [Google Scholar] [CrossRef]
- Thayaparan, T.; Spaans, A. Noise Radar Technology Basics; Technical Memorandum; Defence R&D Canada: Ottawa, ON, Canada, 2006; Available online: https://apps.dtic.mil/sti/tr/pdf/ADA462896.pdf (accessed on 31 January 2025).
- Savci, K.; Stove, A.G.; De Palo, F.; Erdogan, A.Y.; Galati, G.; Lukin, K.A.; Lukin, S.; Marques, P.; Pavan, G.; Wasserzier, C. Noise Radar—Overview and Recent Developments. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 8–20. [Google Scholar] [CrossRef]
- Galati, G.; Pavan, G. Noise Radar Technology as an Interference Prevention Method. J. Electr. Comput. Eng. 2013, 2013, 146986. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar]
- Palo, F.D.; Galati, G.; Pavan, G.; Wasserzier, C.; Savci, K. Introduction to noise radar and its waveforms. Sensors 2020, 20, 5187. [Google Scholar] [CrossRef]
- Turin, G. An introduction to matched filters. IRE Trans. Inf. Theory 1960, 6, 311–329. [Google Scholar]
- Govoni, M.A.; Li, H.; Kosinski, J.A. Range-Doppler resolution of the linear-FM noise radar waveform. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 658–664. [Google Scholar] [CrossRef]
- De Palo, F.; Galati, G. Range sidelobes attenuation of pseudorandom waveforms for civil radars. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; pp. 114–117. [Google Scholar]
- Savci, K.; Galati, G.; Pavan, G. Low-PAPR waveforms with shaped spectrum for enhanced low probability of intercept noise radars. Remote Sens. 2021, 13, 2372. [Google Scholar] [CrossRef]
- He, H.; Li, J.; Stoica, P. Waveform Design for Active Sensing Systems: A Computational Approach; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Gerhberg, R.; Saxton, W. A practical algorithm for the determination of phase from image and diffraction plane picture. Optik 1972, 35, 237–246. [Google Scholar]
- Galati, G.; Pavan, G.; Wasserzier, C. Signal design and processing for noise radar. EURASIP J. Adv. Signal Process. 2022, 2022, 52. [Google Scholar]
- Ville, J. Theorie et applications de la notion de signal analytique. Cables Transm. 1948, 1, 61–74. [Google Scholar]
- Choi, H.I.; Williams, W.J. Improved time-frequency representation of multicomponent signals using exponential kernels. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 862–871. [Google Scholar] [CrossRef]
- Cohen, L. Time-Frequency Analysis; Prentice Hall PTR: Englewood Cliffs, NJ, USA, 1995; Volume 778. [Google Scholar]
- Aguiar-Conraria, L.; Soares, M.J. The continuous wavelet transform: Moving beyond uni-and bivariate analysis. J. Econ. Surv. 2014, 28, 344–375. [Google Scholar] [CrossRef]
- Çotuk, N.; Kayran, A.H.; Aytun, A.; Savci, K. Detection of Marine Noise Radars with Spectral Kurtosis Method. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 22–31. [Google Scholar]
- Zhao, M.; Xu, S.; Sun, B. Evaluation of Waveform RF Stealth Performance Based on Relative Entropy. In Proceedings of the 8th International Conference on Communication and Information Processing, ICCIP ’22, Beijing, China, 3–5 November 2022; pp. 156–162. [Google Scholar] [CrossRef]
- Ziemann, M.R.; Metzler, C.A. Adaptive LPD Radar Waveform Design with Generative Adversarial Neural Networks. In Proceedings of the 2023 57th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 29 October–1 November 2023; pp. 1039–1043. [Google Scholar]
- Jones, M.C.; Sibson, R. What is projection pursuit? J. R. Stat. Soc. Ser. A 1987, 150, 1–18. [Google Scholar] [CrossRef]
- Bühlmann, V. Negentropy. In Posthuman Glossary; Bloomsbury Academic: London, UK, 2018; pp. 273–277. [Google Scholar]
- Stringer, J.; Lamont, G.; Akers, G. Radar phase-coded waveform design using MOEAs. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Chopra, A. Association Control Based Load Balancing in Wireless Cellular Networks Using Preamble Sequences. Ph.D. Thesis, Open Access Te Herenga Waka-Victoria University of Wellington, Wellington, New Zealand, 2012. [Google Scholar]
- Taylor, T.T. Design of line-source antennas for narrow beamwidth and low side lobes. Trans. Ire Prof. Group Antennas Propag. 1955, 3, 16–28. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Deb, K. A comparative analysis of selection schemes used in genetic algorithms. In Foundations of Genetic Algorithms; Elsevier: Amsterdam, The Netherlands, 1991; Volume 1, pp. 69–93. [Google Scholar]
- Deb, K.; Sindhya, K.; Okabe, T. Self-adaptive simulated binary crossover for real-parameter optimization. In Proceedings of the 9th Annual Conference on Genetic and Evolutionary Computation, GECCO ’07, London, UK, 7–11 July 2007; pp. 1187–1194. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, R.B. Simulated binary crossover for continuous search space. Complex Syst. 1995, 9, 115–148. [Google Scholar]
- Lin, J.; Qu, L. Feature extraction based on Morlet wavelet and its application for mechanical fault diagnosis. J. Sound Vib. 2000, 234, 135–148. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sénica, A.L.; Marques, P.A.C.; Figueiredo, M.A.T. Noise Radar Waveform Design Using Evolutionary Algorithms and Negentropy Constraint. Remote Sens. 2025, 17, 1327. https://doi.org/10.3390/rs17081327
Sénica AL, Marques PAC, Figueiredo MAT. Noise Radar Waveform Design Using Evolutionary Algorithms and Negentropy Constraint. Remote Sensing. 2025; 17(8):1327. https://doi.org/10.3390/rs17081327
Chicago/Turabian StyleSénica, Afonso L., Paulo A. C. Marques, and Mário A. T. Figueiredo. 2025. "Noise Radar Waveform Design Using Evolutionary Algorithms and Negentropy Constraint" Remote Sensing 17, no. 8: 1327. https://doi.org/10.3390/rs17081327
APA StyleSénica, A. L., Marques, P. A. C., & Figueiredo, M. A. T. (2025). Noise Radar Waveform Design Using Evolutionary Algorithms and Negentropy Constraint. Remote Sensing, 17(8), 1327. https://doi.org/10.3390/rs17081327