
Robust Low-Sidelobe MIMO Dual-Function Radar–Communication Waveform Design



Abstract
1. Introduction
- A transmit signal model based on uncertainty sets of amplitude–phase errors is formulated for MIMO DFRC systems.
- A robust low-sidelobe MIMO DFRC waveform design method is proposed using the ADMM framework, which is convergent and has high computational efficiency.
2. Signal Model and Problem Description
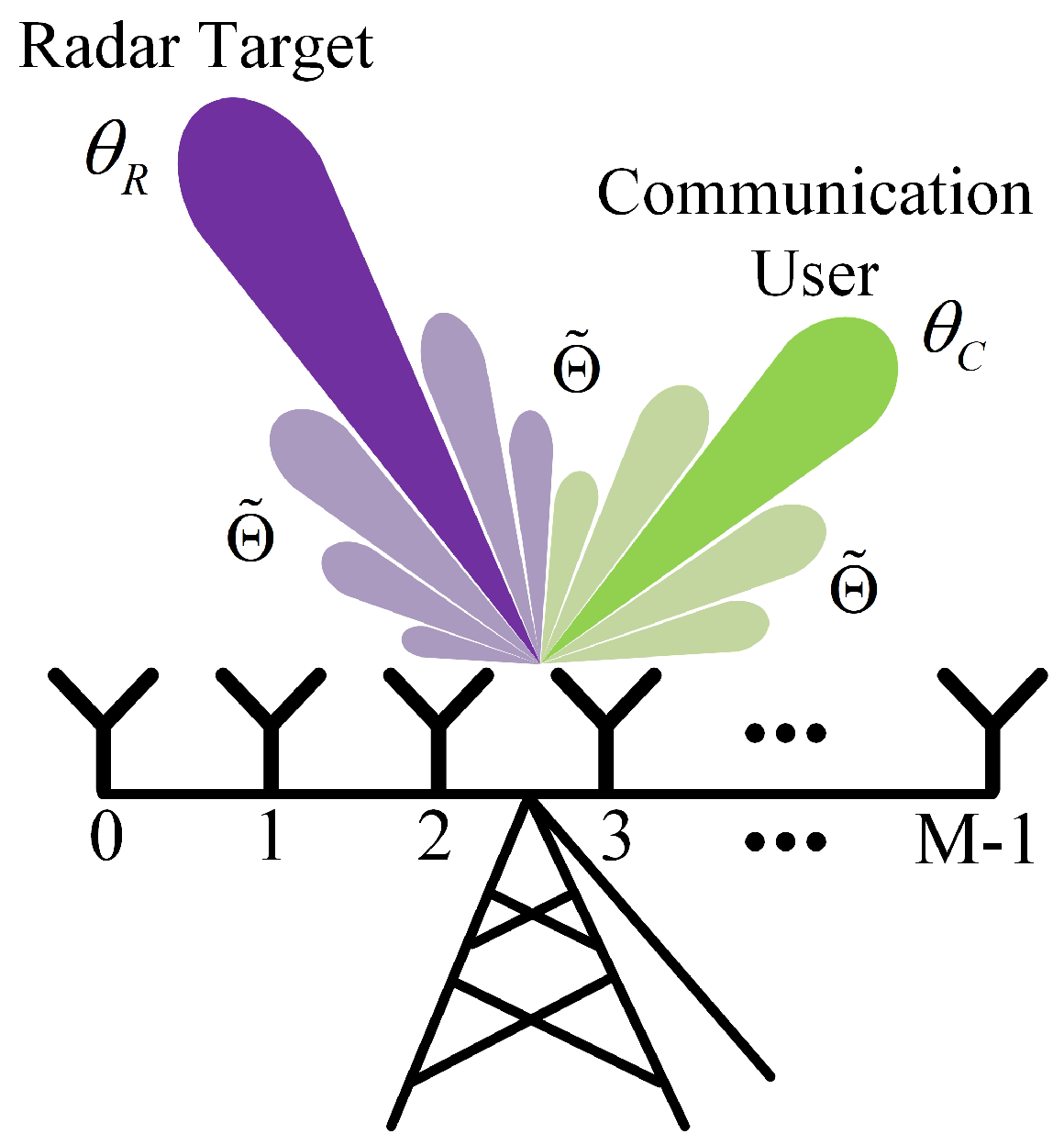
2.1. DFRC Transmit Signal Model
2.2. Problem Formulation
3. Robust Low-Sidelobe MIMO DFRC Waveform Design
3.1. Problem Relaxation
3.2. Optimal Transmit Waveform Design
3.2.1. Pre-Coding Weight Vectors Optimized Based on Low-Sidelobe Criterion
3.2.2. Pre-Coding Weight Vectors Design Based on Mutual Interference Suppression Constraint and Transmit Power Constraint
3.3. Analysis of Computational Complexity and Convergence
3.3.1. Analysis of Computational Complexity
3.3.2. Analysis of Convergence
4. Simulation Results
4.1. Performance Metrics
4.1.1. Waveform Error
4.1.2. Peak-to-Sidelobe Ratio
4.1.3. Mutual Interference Level
4.1.4. Average Gain of Pulse Compression in Radar Mainlobe
4.1.5. Symbol Error Rate
4.2. Simulation
4.2.1. Convergence Analysis
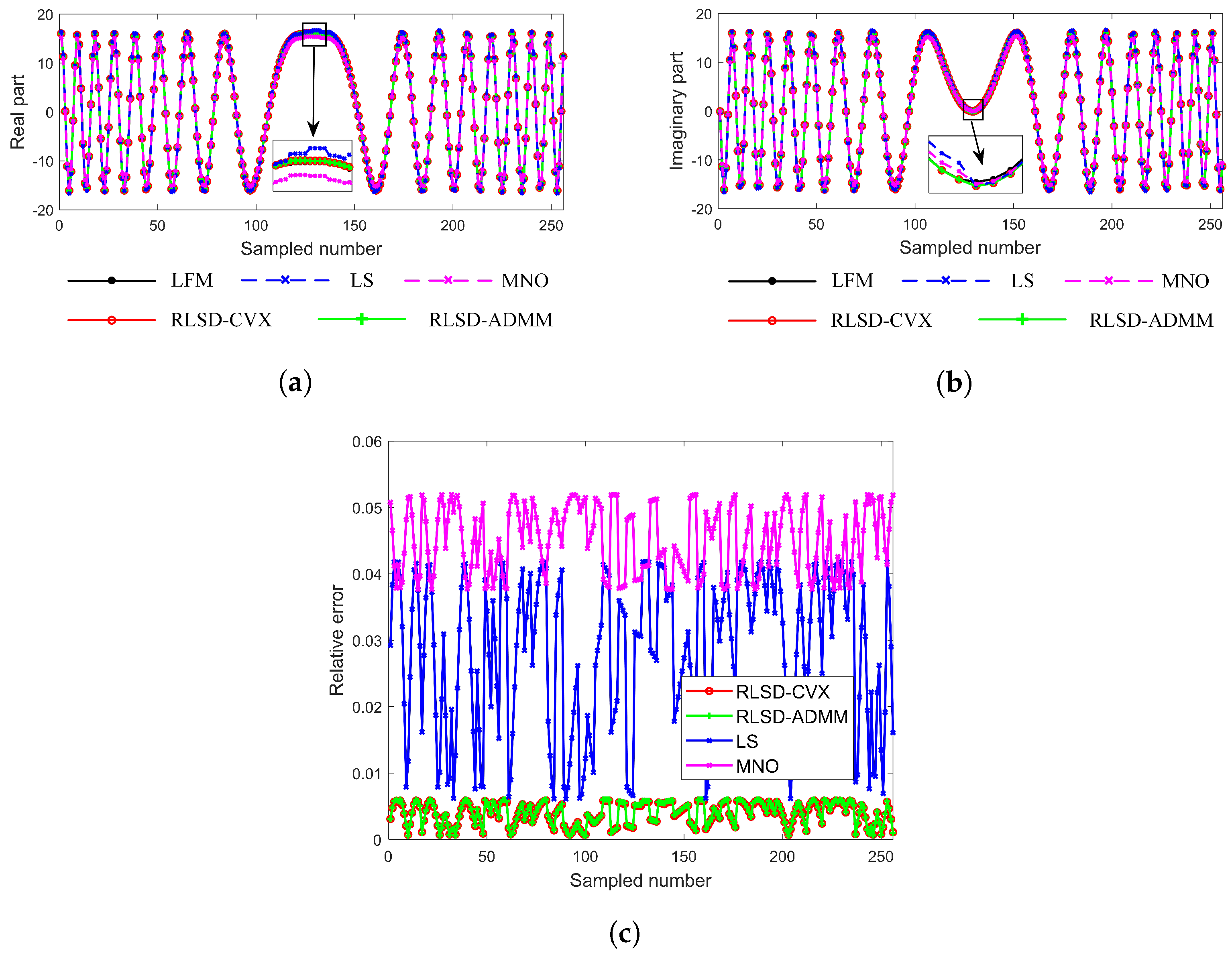
4.2.2. Waveform Error
4.2.3. Transmit Beampattern
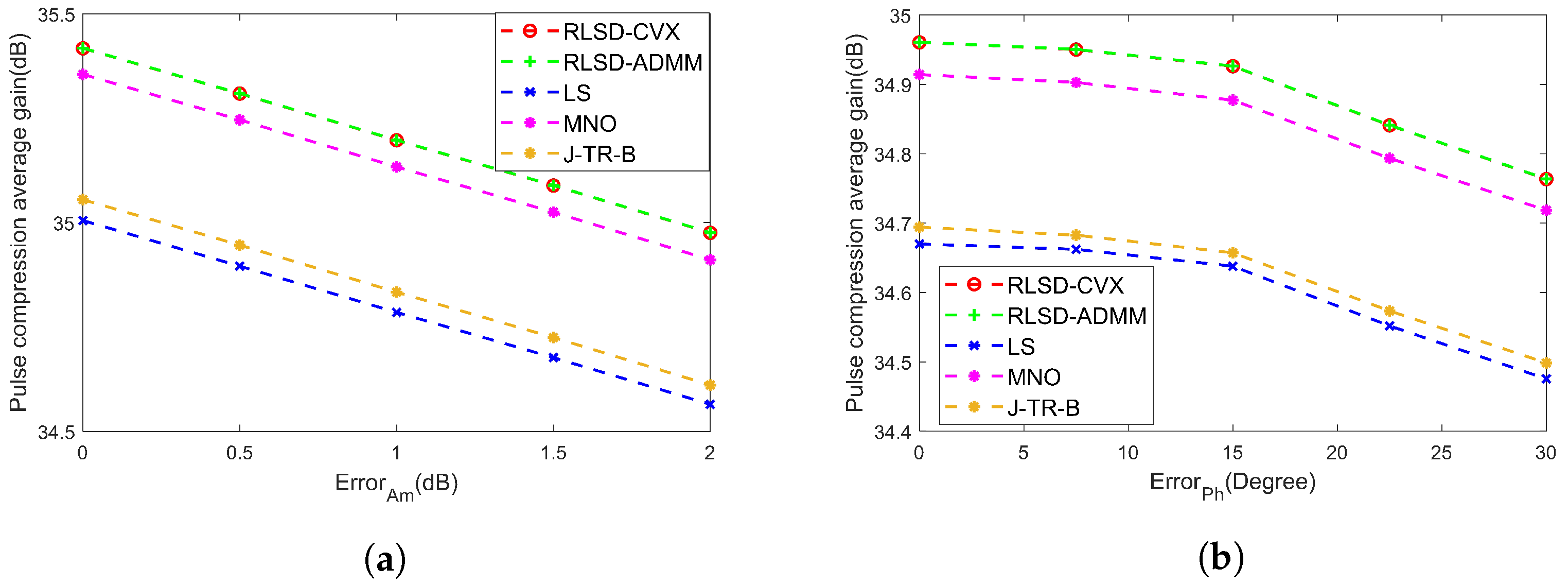
4.2.4. Pulse Compression Gain in Radar Mainlobe
4.2.5. Symbol Error Rate
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix B.1. Proof of (43)
Appendix B.2. Proof of (42)
Appendix B.3. Proof of (41)
References
- Xu, Z.; Tang, B.; Ai, W.; Xie, Z.; Zhu, J. Radar Transceiver Design for Extended Targets Based on Optimal Linear Detector. IEEE Trans. Aerosp. Electron. Syst. 2025, 1–12. [Google Scholar]
- Xu, Z.; Tang, B.; Ai, W.; Zhu, J. Relative Entropy Based Jamming Signal Design Against Radar Target Detection. IEEE Trans. Signal Process. 2025, 73, 1200–1215. [Google Scholar]
- Zheng, L.; Lops, M.; Eldar, Y.C.; Wang, X. Radar and communication coexistence: An overview: A review of recent methods. IEEE Signal Process. Mag. 2019, 36, 85–99. [Google Scholar]
- Mahal, J.A.; Khawar, A.; Abdelhadi, A.; Clancy, T.C. Spectral coexistence of MIMO radar and MIMO cellular system. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 655–668. [Google Scholar]
- Li, B.; Petropulu, A.P. Joint transmit designs for coexistence of MIMO wireless communications and sparse sensing radars in clutter. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2846–2864. [Google Scholar]
- Liu, F.; Garcia-Rodriguez, A.; Masouros, C.; Geraci, G. Interfering channel estimation in radar-cellular coexistence: How much information do we need? IEEE Trans. Wirel. Commun. 2019, 18, 4238–4253. [Google Scholar]
- Li, B.; Petropulu, A.P.; Trappe, W. Optimum co-design for spectrum sharing between matrix completion based MIMO radars and a MIMO communication system. IEEE Trans. Signal Process. 2016, 64, 4562–4575. [Google Scholar]
- Xiao, B.; Huo, K.; Liu, Y.X. Development and prospect of radar and communication integration. J. Electron. Inf. Technol. 2019, 41, 739–750. [Google Scholar]
- Zhang, J.A.; Liu, F.; Masouros, C.; Heath, R.W.; Feng, Z.; Zheng, L.; Petropulu, A. An overview of signal processing techniques for joint communication and radar sensing. IEEE J. Sel. Top. Signal Process. 2021, 15, 1295–1315. [Google Scholar]
- Ma, S.; Sheng, H.; Yang, R.; Li, H.; Wu, Y.; Shen, C.; Al-Dhahir, N.; Li, S. Covert beamforming design for integrated radar sensing and communication systems. IEEE Trans. Wirel. Commun. 2023, 22, 718–731. [Google Scholar]
- Zhao, N.; Wang, Y.; Zhang, Z.; Chang, Q.; Shen, Y. Joint transmit and receive beamforming design for integrated sensing and communication. IEEE Commun. Lett. 2022, 26, 662–666. [Google Scholar]
- Kumari, P.; Choi, J.; Gonzlez-Prelcic, N.; Heath, R.W. IEEE 802.11ad based radar: An approach to joint vehicular communication-radar system. IEEE Trans. Veh. Technol. 2018, 67, 3012–3027. [Google Scholar]
- Zhang, H.; Liu, W.; Zhang, Q.; Zhang, L.; Liu, B. Joint customer assignment, power allocation, and subchannel allocation in a UAV-based joint radar and communication network. IEEE Internet Things J. 2024, 11, 29643–29660. [Google Scholar]
- Zhang, H.; Liu, W.; Zhang, Q.; Zhang, L.; Liu, B.; Xu, H.X. Joint power, bandwidth, and subchannel allocation in a UAV-assisted DFRC network. IEEE Internet Things J. 2025, 1–17. [Google Scholar]
- Liu, Y.; Liao, G.; Yang, Z.; Xu, J. Multiobjective optimal waveform design for OFDM integrated radar and communication systems. Signal Process. 2017, 141, 331–342. [Google Scholar]
- Yin, T.; Guo, W.; Zhu, J.; Wu, Y.; Zhang, B.; Zhou, Z. Underwater Broadband Target Detection by Filtering Scanning Azimuths Based on Features of Sub-band Peaks. IEEE Sens. J. 2025, 1–9. [Google Scholar]
- Zhu, J.; Yin, T.; Guo, W.; Zhang, B.; Zhou, Z.; Liu, W. An Underwater Target Azimuth Trajectory Enhancement Approach in BTR. Appl. Acoust. 2025, 230, 110373. [Google Scholar]
- Liu, Y.; Liao, G.; Xu, J.; Yang, Z.; Huang, L.; Zhang, Y. Transmit power adaptation for orthogonal frequency division multiplexing integrated radar and communication systems. J. Appl. Remote Sens. 2017, 11, 1–17. [Google Scholar]
- Liu, Y.; Liao, G.; Xu, J.; Yang, Z.; Zhang, Y. Adaptive OFDM integrated radar and communications waveform design based on information theory. IEEE Commun. Lett. 2017, 21, 2174–2177. [Google Scholar]
- Liu, Y.; Liao, G.; Yang, Z. Robust OFDM integrated radar and communications waveform design based on information theory. Signal Process. 2019, 162, 317–329. [Google Scholar]
- Yuan, W.; Wei, Z.; Li, S.; Yuan, J.; Ng, D.W.K. Integrated sensing and communication-assisted orthogonal time frequency space transmission for vehicular networks. IEEE J. Sel. Top. Signal Process. 2021, 15, 1515–1528. [Google Scholar] [CrossRef]
- Gaudio, L.; Kobayashi, M.; Caire, G.; Colavolpe, G. On the effectiveness of OTFS for joint radar parameter estimation and communication. IEEE Trans. Wirel. Commun. 2020, 19, 5951–5965. [Google Scholar] [CrossRef]
- Zhu, J.; Xie, Z.; Jiang, N.; Song, Y.; Han, S.; Liu, W.; Huang, X. Delay-Doppler Map Shaping through Oversampled Complementary Sets for High Speed Target Detection. Remote Sens. 2024, 16, 2898. [Google Scholar] [CrossRef]
- Karpovich, P.; Zielinski, T.P. Random-padded OTFS modulation for joint communication and radar/sensing systems. In Proceedings of the 2022 23rd International Radar Symposium (IRS), Gdansk, Poland, 12–14 September 2022; pp. 104–109. [Google Scholar]
- Zhang, Y.; Li, Q.; Huang, L.; Pan, C.; Song, J. A Modified Waveform Design for Radar-Communication Integration Based on LFM-CPM. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, NSW, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Chen, X.; Wang, X.; Xu, S.; Zhang, J. A novel radar waveform compatible with communication. In Proceedings of the 2011 International Conference on Computational Problem-Solving (ICCP), Chengdu, China, 21–23 October 2011; pp. 177–181. [Google Scholar]
- Huang, T.; Shlezinger, N.; Xu, X.; Liu, Y.; Eldar, Y.C. MAJoRCom: Dual-function radar communication system using index modulation. IEEE Trans. Signal Process. 2020, 68, 3423–3438. [Google Scholar] [CrossRef]
- Huang, T.; Shlezinger, N.; Xu, X.; Ma, D.; Liu, Y.; Eldar, Y.C. Multicarrier agile phased array radar. IEEE Trans. Signal Process. 2020, 68, 5706–5721. [Google Scholar] [CrossRef]
- Sahin, A.; Hoque, S.S.M.; Chen, C.-Y. Index modulation with circularly-shifted chirps for dual-function radar and communications. IEEE Trans. Wirel. Commun. 2022, 21, 2938–2952. [Google Scholar] [CrossRef]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. A dual function radar-communications system using sidelobe control and waveform diversity. In Proceedings of the 2015 IEEE Radar Conference (RadarCon), Arlington, VA, USA, 10–15 May 2015; pp. 1260–1263. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Dual-function radar-communications: Information embedding using sidelobe control and waveform diversity. IEEE Trans. Signal Process. 2016, 64, 2168–2181. [Google Scholar] [CrossRef]
- Arik, M.; Akan, O.B. Utilizing sidelobe ASK based joint radar-communication system under fading. In Proceedings of the 2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 10–15 May 2017; pp. 623–628. [Google Scholar]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D. Phase-modulation based dual-function radar-communications. IET Radar Sonar Navig. 2016, 10, 1411–1421. [Google Scholar] [CrossRef]
- Hassanien, A.; Zhang, Y.D.; Gu, Y. Dual-function radar-communications using QAM-based sidelobe modulation. Digit. Signal Process. 2018, 82, 166–174. [Google Scholar]
- Liu, F.; Zhou, L.; Masouros, C.; Li, A.; Luo, W.; Petropulu, A. Toward dual-functional radar-communication systems: Optimal waveform design. IEEE Trans. Signal Process. 2018, 66, 4264–4279. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Li, A.; Sun, H.; Hanzo, L. MU-MIMO communications with MIMO radar: From coexistence to joint transmission. IEEE Trans. Wirel. Commun. 2018, 17, 2755–2770. [Google Scholar]
- Liu, X.; Huang, T.; Shlezinger, N.; Liu, Y.; Zhou, J.; Eldar, Y.C. Joint Transmit Beamforming for Multiuser MIMO Communications and MIMO Radar. IEEE Trans. Signal Process. 2020, 68, 3929–3944. [Google Scholar]
- Shi, S.; Wang, Z.; He, Z.; Cheng, Z. Constrained waveform design for dual-functional MIMO radar-communication system. Signal Process. 2020, 171, 107530. [Google Scholar] [CrossRef]
- Jiang, M.; Liao, G.; Yang, Z.; Liu, Y.; Chen, Y.; Li, H. Integrated waveform design for an Integrated Radar and Communication System with a Uniform Linear Array. In Proceedings of the 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 8–11 June 2020; pp. 1–5. [Google Scholar]
- Jiang, M.; Liao, G.; Yang, Z.; Liu, Y.; Chen, Y. Integrated radar and communication waveform design based on a shared array. Signal Process. 2021, 182, 107956. [Google Scholar]
- Wu, W.; Han, G.; Cao, Y.; Huang, Y.; Yeo, T.-S. MIMO waveform design for dual functions of radar and communication with space-time coding. IEEE J. Sel. Areas Commun. 2022, 40, 1906–1917. [Google Scholar]
- Liu, X.; Liao, G.; Liu, Y.; Tang, H.; Wang, H. Low Sidelobe Integrated Radar and Communication Shared Waveform Design. In Proceedings of the 2023 3rd International Conference on Frontiers of Electronics, Information and Computation Technologies (ICFEICT), Yangzhou, China, 26–29 May 2023; pp. 559–563. [Google Scholar]
- Feng, Y.; Liao, G.; Xu, J.; Zhu, S.; Zeng, C. Robust adaptive beamforming against large steering vector mismatch using multiple uncertainty sets. Signal Process. 2018, 152, 320–330. [Google Scholar] [CrossRef]
- Huang, Y.; Vorobyov, S.A.; Luo, Z.-Q. Quadratic matrix inequality approach to robust adaptive beamforming for general-rank signal model. IEEE Trans. Signal Process. 2020, 68, 2244–2255. [Google Scholar]
- Vorobyov, S.A.; Gershman, A.B.; Luo, Z.Q. Robust adaptive beamforming using worst-case performance optimization: A solution to the signal mismatch problem. IEEE Trans. Signal Process. 2003, 51, 1702–1715. [Google Scholar]
- Grant, M.; Boyd, S. CVX: Matlab Software for Disciplined Convex Programming, version 2.1. March 2014. Available online: http://cvxr.com/cvx (accessed on 1 January 2020).
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed optimization and statistical learning via the alternating direction method of multipliers. Found. Trends Mach. Learn. 2011, 3, 1–122. [Google Scholar]
- Descartes, R.; Smith, D.E.; Latham, M.L. The Geometry of René Descartes: With a Facsimile of the First Edition, 1637; Dover Publications: Mineola, NY, USA, 1954. [Google Scholar]
- Abramowitz, M. The Solutions of Quartic Equations. In Handbook of Mathematical Functions with Formulas, Graphs, Mathematical Tables; Dover Publications: Mineola, NY, USA, 1972; pp. 17–18. [Google Scholar]
- He, B.S.; Yang, H.; Wang, S.L. Alternating Direction Method with Self-Adaptive Penalty Parameters for Monotone Variational Inequalities. J. Optim. Theory Appl. 2000, 106, 337–356. [Google Scholar]
- Wang, S.; Liao, L. Decomposition Method with a Variable Parameter for a Class of Monotone Variational Inequality Problems. J. Optim. Theory Appl. 2001, 109, 415–429. [Google Scholar]
- Liang, J.; So, H.C.; Li, J.; Farina, A. Unimodular Sequence Design Based on Alternating Direction Method of Multipliers. IEEE Trans. Signal Process. 2016, 64, 5367–5381. [Google Scholar]
- Liu, Z.; Aditya, S.; Li, H.; Clerckx, B. Joint Transmit and Receive Beamforming Design in Full-Duplex Integrated Sensing and Communications. IEEE J. Sel. Areas Commun. 2023, 41, 2907–2919. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | , , , , , , , M, , , . |
| Step 1 | while or and do |
| (1) Separate the real and imaginary components of | |
| , , , , and ; | |
| (2) is updated by (21); | |
| (3) is updated by (29); | |
| (4) is updated by (30); | |
| (5) . | |
| Step 2 | Calculate by (32) and by (33); |
| Step 3 | Calculate by (34) and by (35); |
| Step 4 | Normalize by (36) and by (37); |
| Step 5 | Calculate by (38). |
| output | Transmit waveform matrix . |
| Method | ||
|---|---|---|
| RLSD-CVX | 59.18 s | 59.88 s |
| RLSD-ADMM | 0.32 s | 0.32 s |
| Method | ||||
|---|---|---|---|---|
| LS | 2.8 × | |||
| MNO | ||||
| RLSD-CVX | ||||
| RLSD-ADMM |
| Method | PSLRR/dB | PSLRC/dB | MILR/dB | MILC/dB |
|---|---|---|---|---|
| LS | 13.03 | 3.20 | −1.17 | −9.90 |
| RLSD-CVX | 17.01 | 7.09 | −2.41 | −12.64 |
| RLSD-ADMM | 17.01 | 7.10 | −2.41 | −12.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Liu, Y.; Liao, G.; Tang, H.; Wang, H.; Dong, X. Robust Low-Sidelobe MIMO Dual-Function Radar–Communication Waveform Design. Remote Sens. 2025, 17, 1242. https://doi.org/10.3390/rs17071242
Liu X, Liu Y, Liao G, Tang H, Wang H, Dong X. Robust Low-Sidelobe MIMO Dual-Function Radar–Communication Waveform Design. Remote Sensing. 2025; 17(7):1242. https://doi.org/10.3390/rs17071242
Chicago/Turabian StyleLiu, Xuchen, Yongjun Liu, Guisheng Liao, Hao Tang, Heming Wang, and Xiaoyang Dong. 2025. "Robust Low-Sidelobe MIMO Dual-Function Radar–Communication Waveform Design" Remote Sensing 17, no. 7: 1242. https://doi.org/10.3390/rs17071242
APA StyleLiu, X., Liu, Y., Liao, G., Tang, H., Wang, H., & Dong, X. (2025). Robust Low-Sidelobe MIMO Dual-Function Radar–Communication Waveform Design. Remote Sensing, 17(7), 1242. https://doi.org/10.3390/rs17071242