

Validating HF Radar Current Accuracy via Lagrangian Measurements and Radar-to-Radar Comparisons in Highly Variable Surface Currents
 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
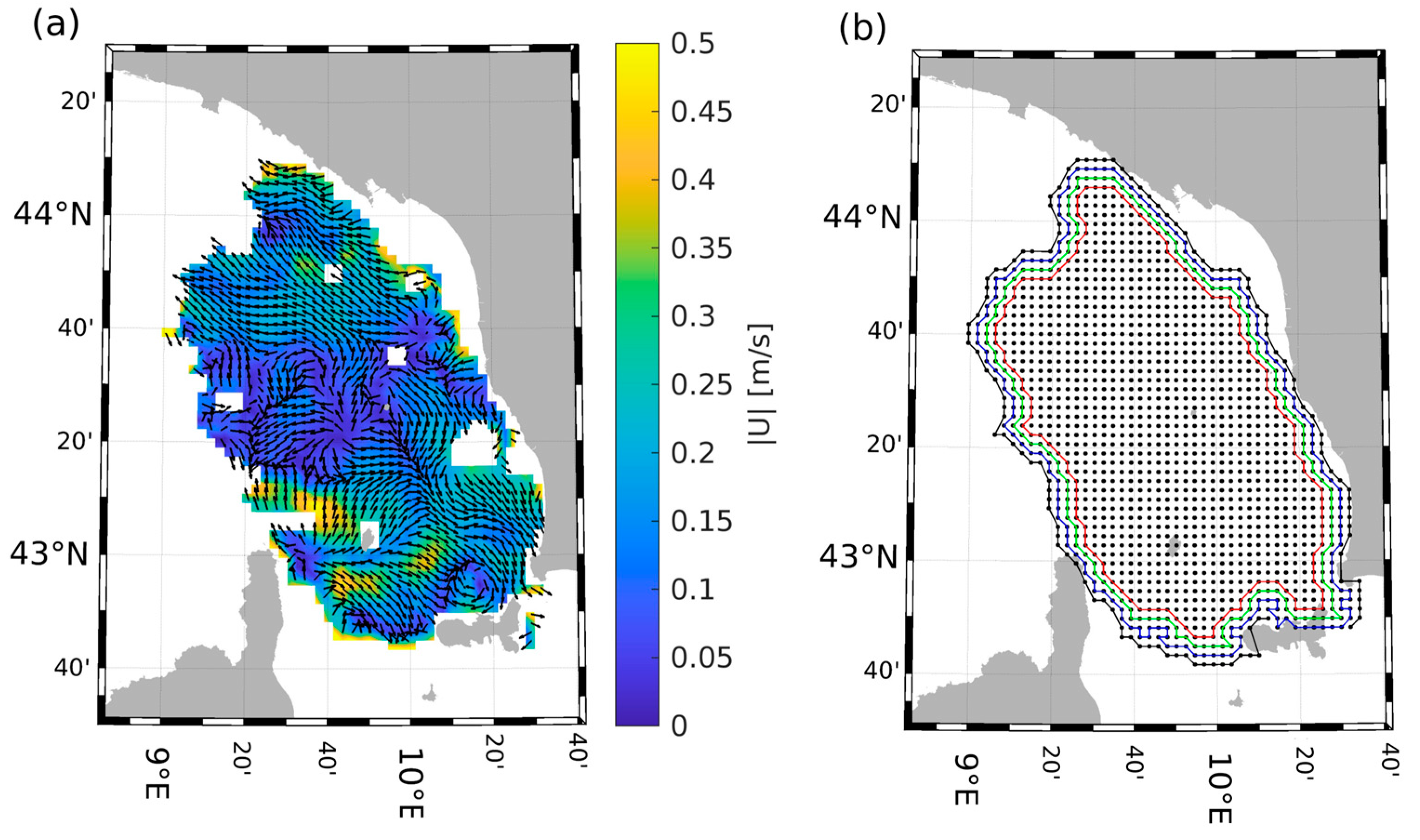
2.1. The HF Radar Network Covering the Tuscany Coast
2.2. Quality Assurance (QA) and Quality Control (QC) Parameters for the HF Radars
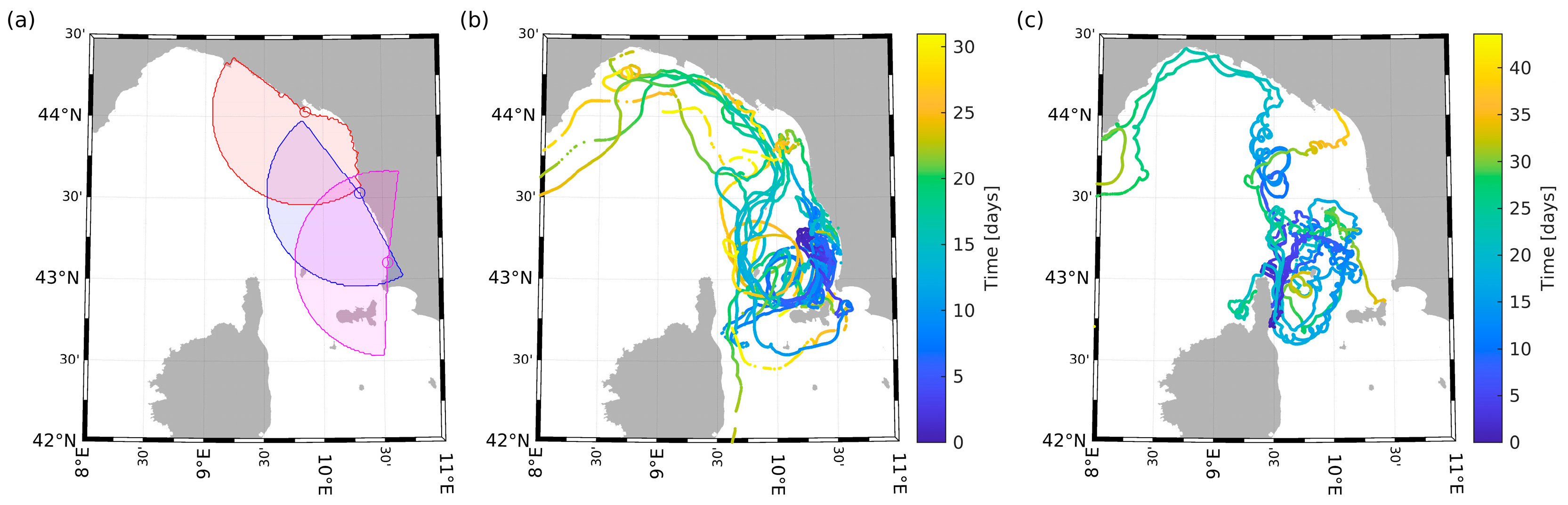
2.3. The Drifter Dataset
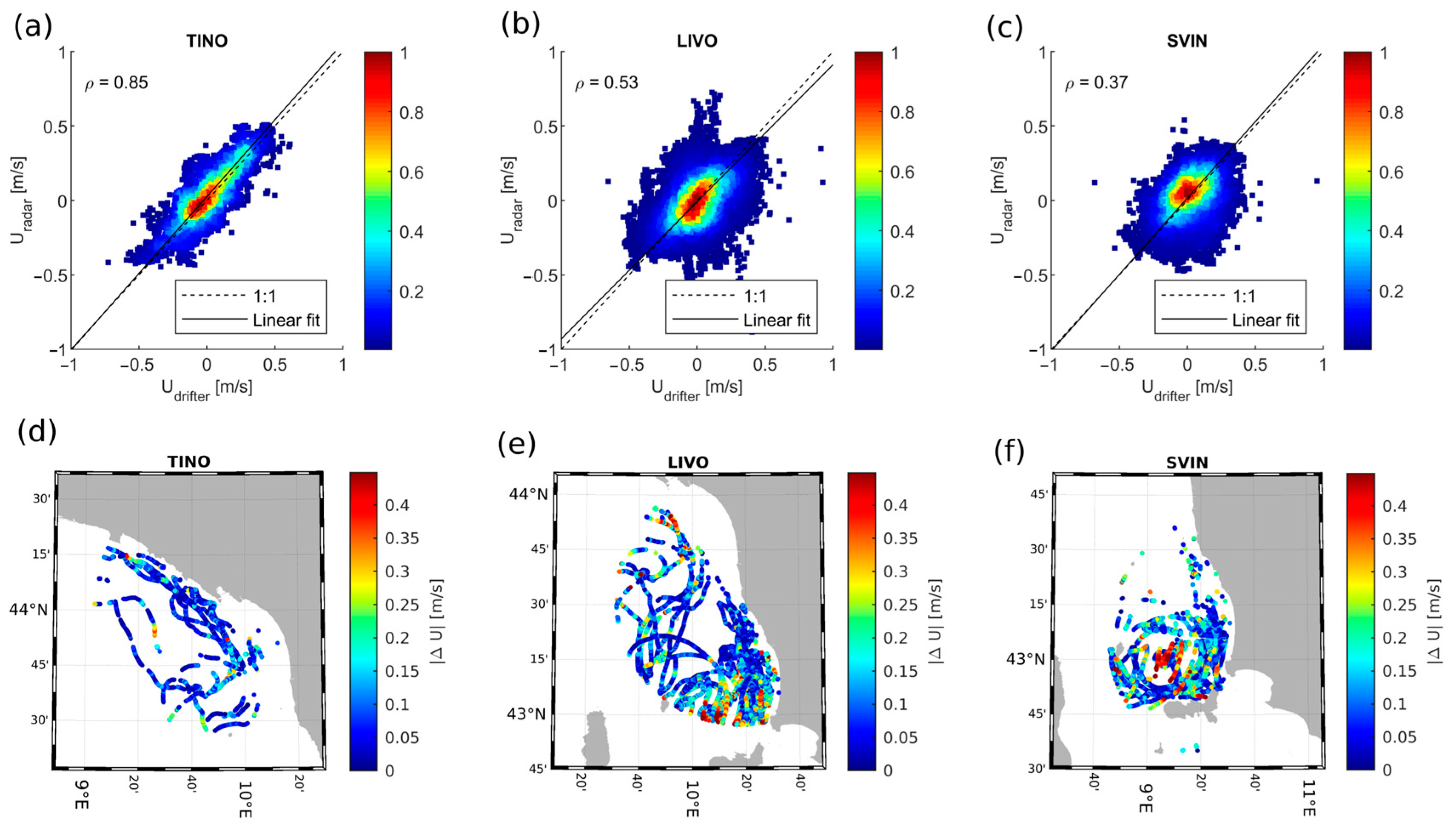
2.4. Comparison of Radial Velocities (Eulerian Approach)
- (i)
- First, the zonal and meridional velocity components are determined from the trajectory of each drifter. The calculation is made on the Cartesian space by means of first-order finite differences, assigning the velocity to the midpoint between two consecutive coordinates. The m_map [36] tool was used to pass from the geographical to the Cartesian space. The values of velocities and positions are then hourly averaged;
- (ii)
- For every drifter position and every time step, the four surrounding radial velocity values were used to linearly interpolate the radial velocities at the drifter position, then the obtained value was hourly averaged to get Ur (the radial velocity component estimated by radars);
- (iii)
- Drifter velocity was projected onto the radial direction to get Ud (herein, the radial velocity component measured by drifters) and compared it to Ur;
- (iv)
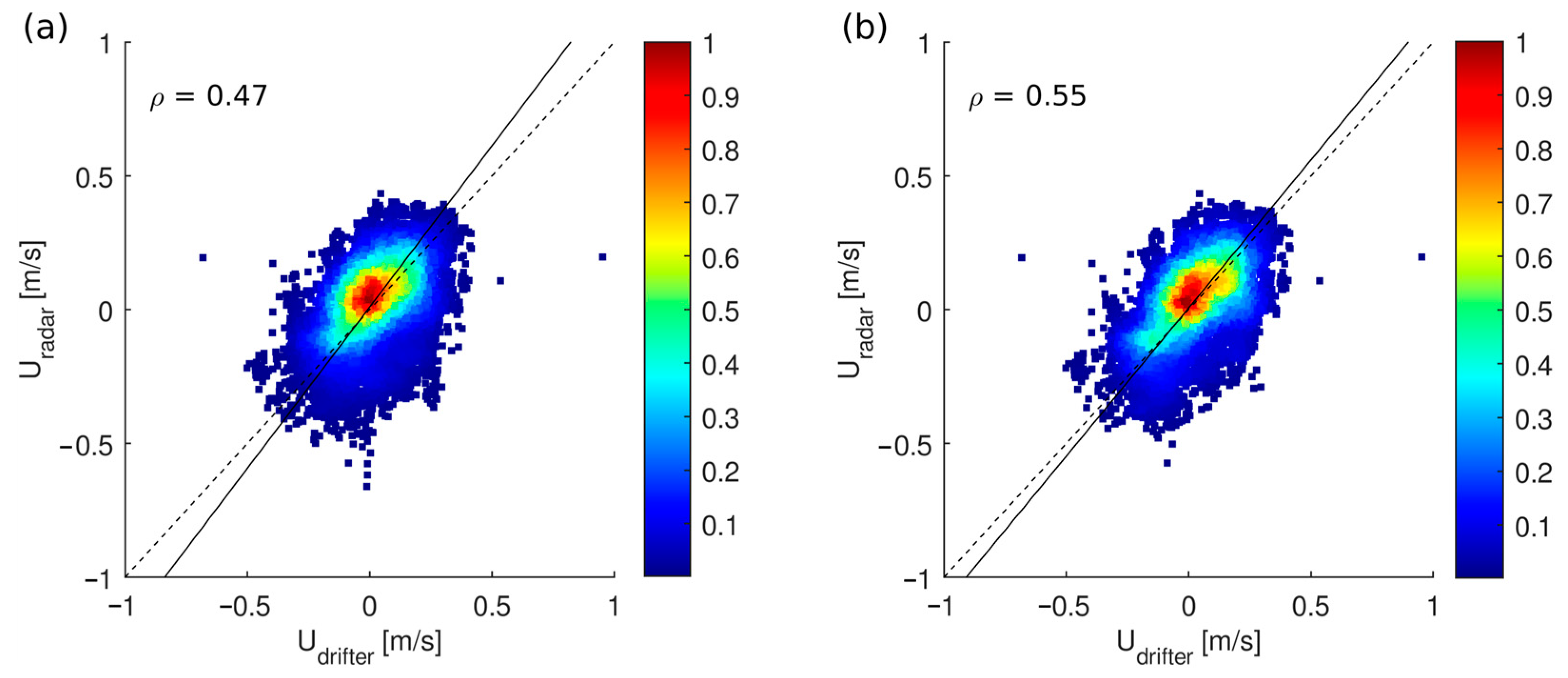
- To refine the velocity estimates, particularly in areas with high spatial variability, the Kriging method was applied to the drifter trajectories.
2.5. Application of Kriging for Velocity Estimation
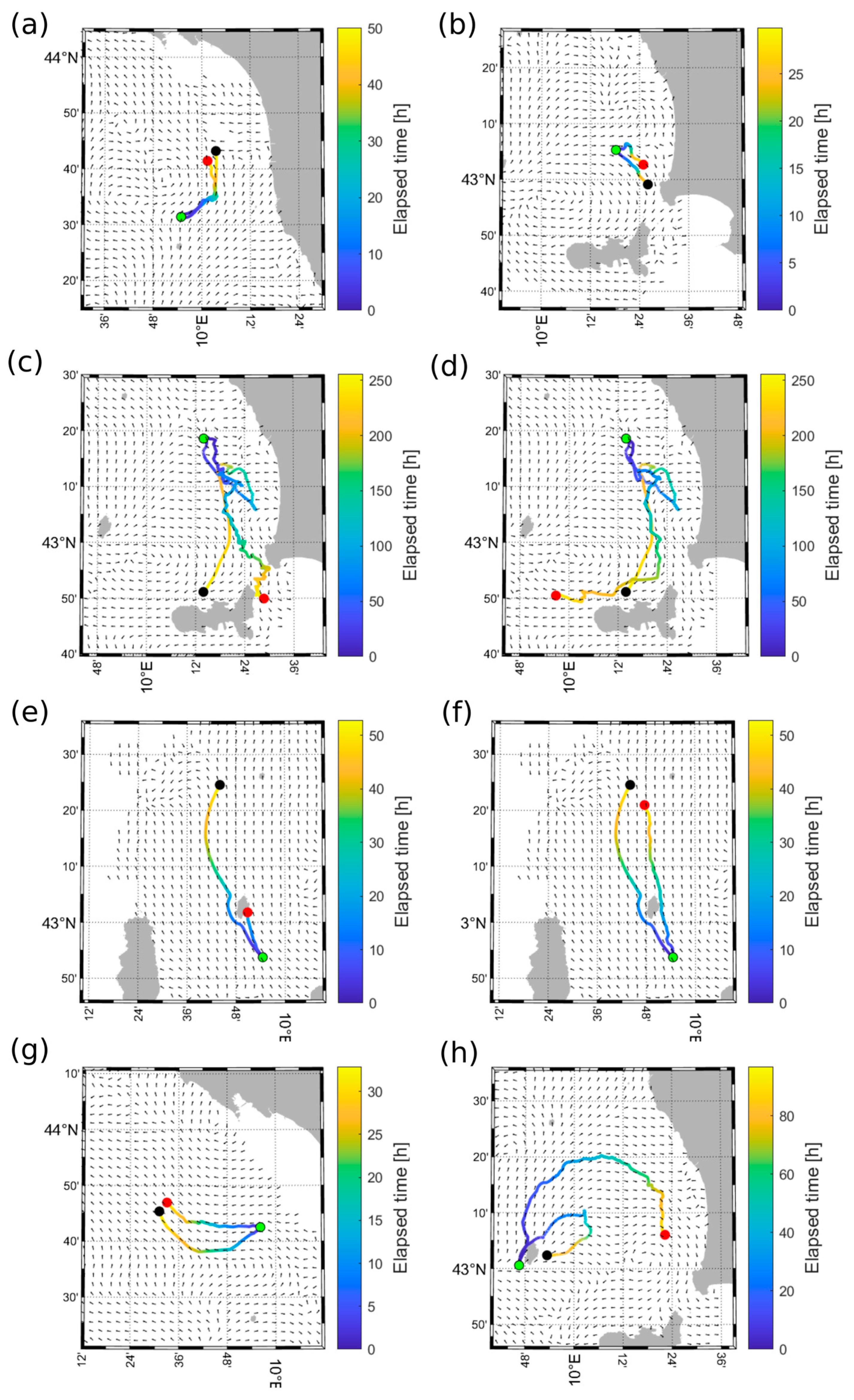
2.6. Comparison of Trajectories (Lagrangian Approach)
3. Results and Discussion from Eulerian Comparison
3.1. HF Radials Comparison and QA
3.2. QC Procedures and Calibration
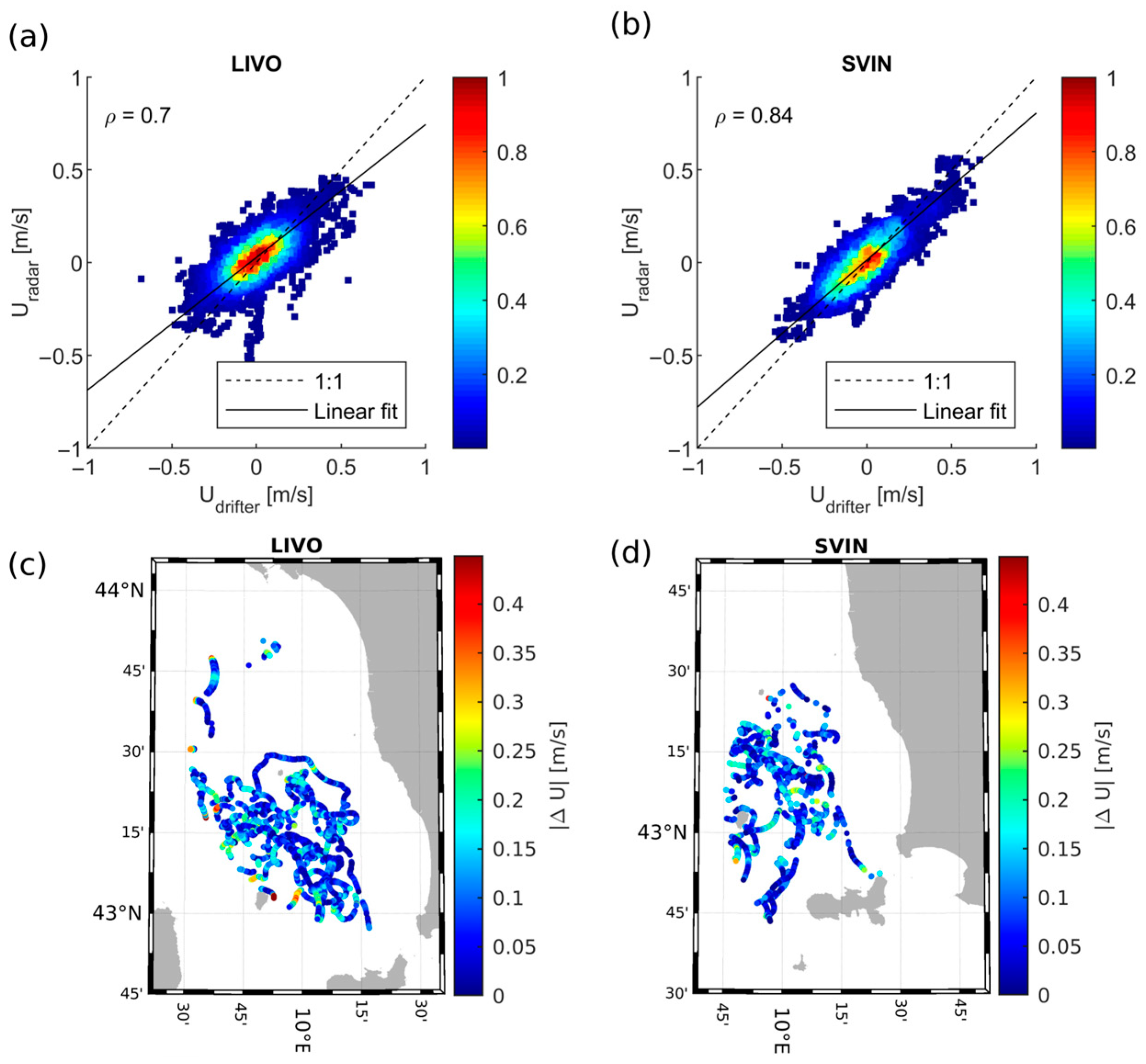
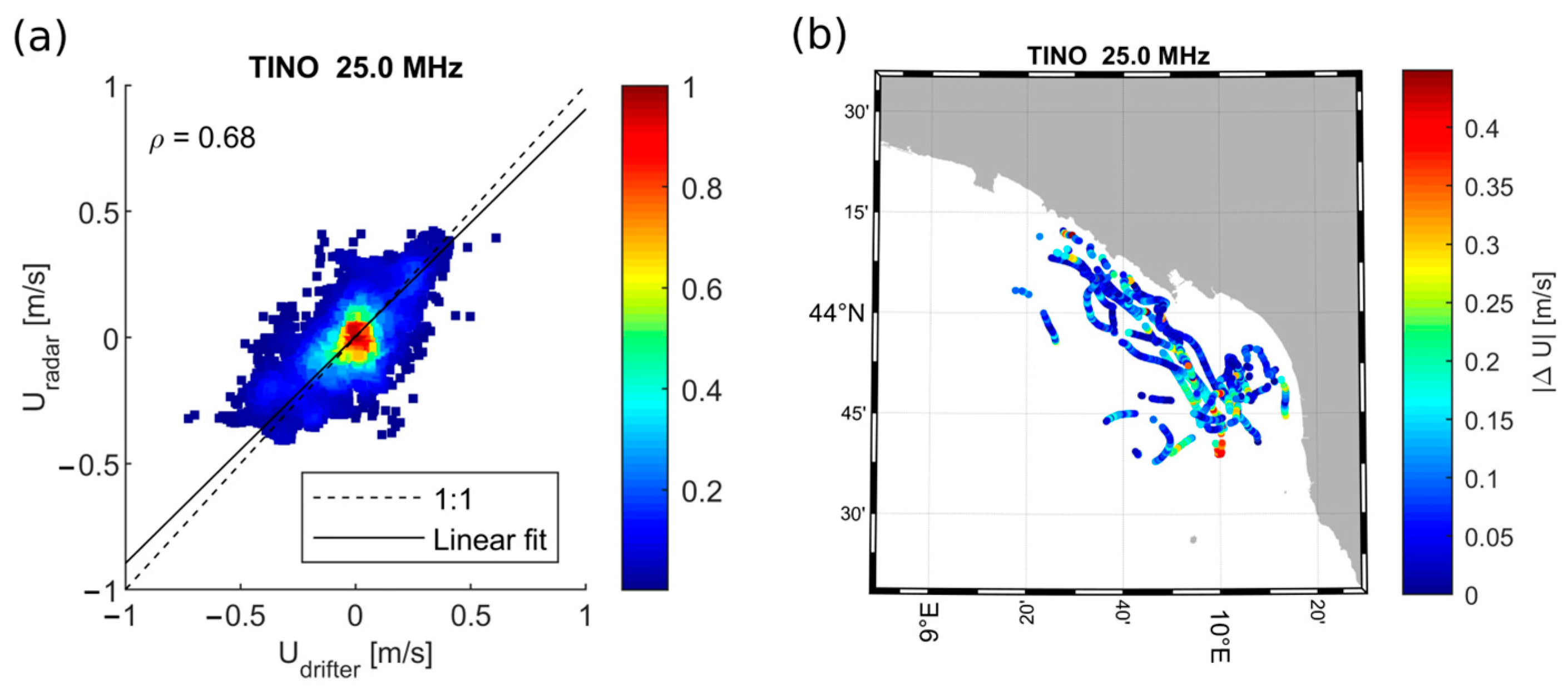
3.3. Baseline Velocity Comparison
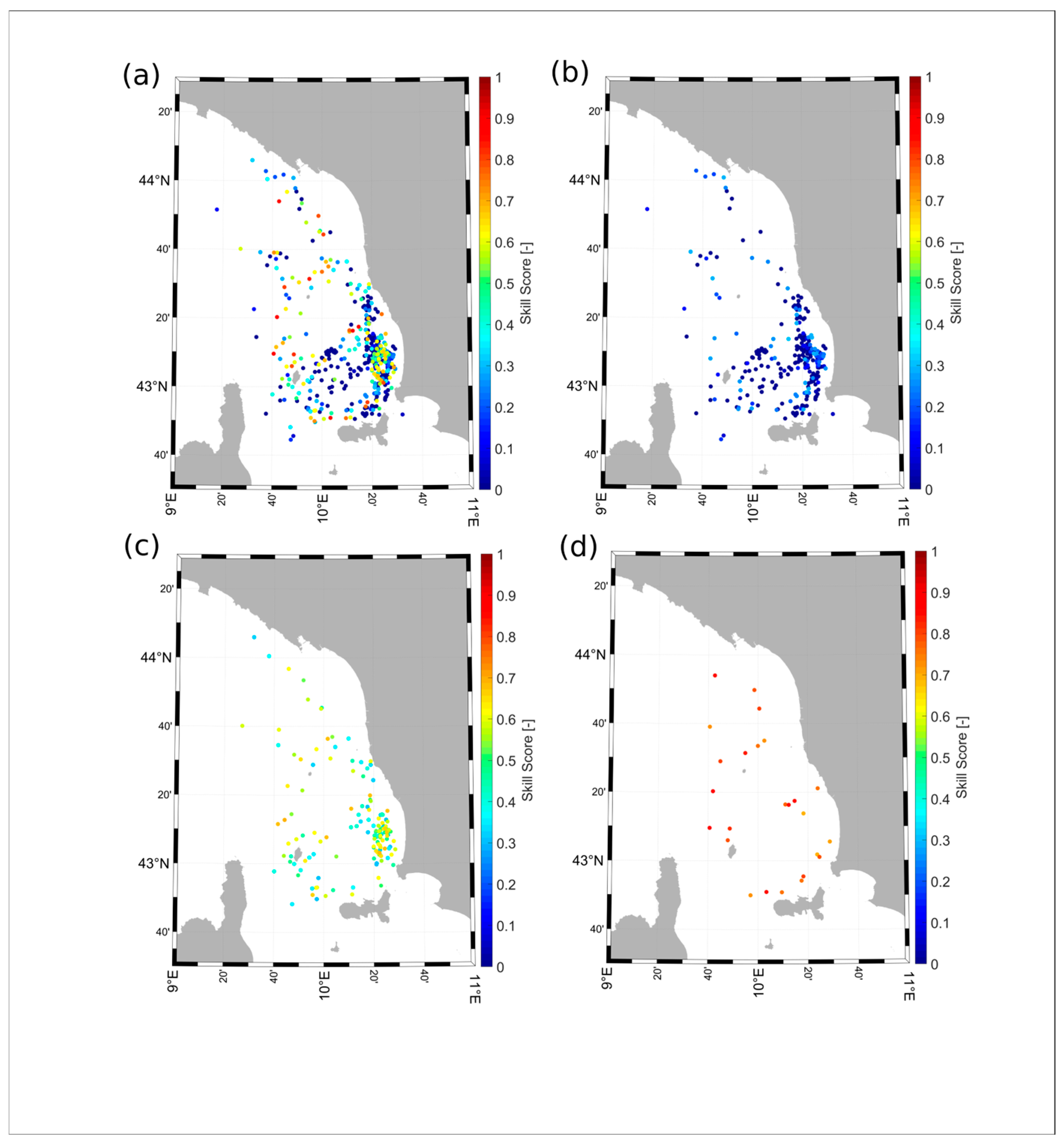
4. Results and Discussion from Lagrangian Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reyes, E.; Aguiar, E.; Bendoni, M.; Berta, M.; Brandini, C.; Cáceres-Euse, A.; Capodici, F.; Cardin, V.; Cianelli, D.; Ciraolo, G.; et al. Coastal high-frequency radars in the Mediterranean–Part 2: Applications in support of science priorities and societal needs. Ocean Sci. 2022, 18, 797–837. [Google Scholar] [CrossRef]
- Lorente, P.; Aguiar, E.; Bendoni, M.; Berta, M.; Brandini, C.; Cáceres-Euse, A.; Capodici, F.; Cianelli, D.; Ciraolo, G.; Corgnati, L.; et al. Coastal high-frequency radars in the Mediterranean–Part 1: Status of operations and a framework for future development. Ocean Sci. 2022, 18, 761–795. [Google Scholar] [CrossRef]
- Cook, T.; Hazard, L.; Otero, M.; Zelenke, B. Deployment and Maintenance of a High-Frequency Radar (HFR) for Ocean Surface Current Mapping: Best Practices; University of California San Diego, Scripps Institution of Oceanography for SCCOOS: San Diego, CA, USA, 2008. [Google Scholar] [CrossRef]
- Horstmann, J.; Corgnati, L.; Mantovani, C.; Quentin, C.; Reyes, E.; Rubio, A.; del Rio, J.; Berry, A. Report on Best Practice in the Implementation and Use of New Systems in JERICO-RI. Part 1: HF-Radar Systems and Part 2: Cabled Coastal Observatories; WP2, Deliverable 2.4. Version 1.0; IFREMER for JERICO NEXT: Brest, France, 2019. [Google Scholar] [CrossRef]
- Mantovani, C.; Corgnati, L.; Horstmann, J.; Rubio, A.; Reyes, E.; Quentin, C.; Cosoli, S.; Asensio, J.L.; Mader, J.; Griffa, A. Best Practices on High Frequency Radar Deployment and Operation for Ocean Current Measurement. Front. Mar. Sci. 2020, 7, 210. [Google Scholar] [CrossRef]
- Chapman, R.D.; Shay, L.K.; Graber, H.C.; Edson, J.B.; Karachintsev, A.; Trump, C.L.; Ross, D.B. On the accuracy of HF radar surface current measurements: Intercomparisons with ship-based sensors. J. Geophys. Res. 1997, 102, 18737–18748. [Google Scholar] [CrossRef]
- Teague, C.C.; Vesecky, J.F.; Hallock, Z.R. A comparison of multifrequency HF radar and ADCP measurements of near-surface currents during COPE-3. IEEE J. Ocean Eng. 2001, 26, 399–405. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R. Assessment of CODAR SeaSonde and WERA HF radars in mapping surface currents on the West Florida Shelf. J. Atmos. Ocean. Technol. 2014, 31, 1363–1382. [Google Scholar] [CrossRef]
- Jimenez, P.; Piedracoba, S.; Fanjul, E.A. Validation of high-frequency radar ocean surface current observations in the NW of the Iberian Peninsula. Cont. Shelf Res. 2015, 92, 1–15. [Google Scholar] [CrossRef]
- Wei, G.; He, Z.; Xie, Y.; Shang, S.; Dai, H.; Wu, J.; Liu, K.; Lin, R.; Wan, Y.; Lin, H.; et al. Assessment of HF radar in mapping surface currents under different sea states. J. Atmos. Ocean. Technol. 2020, 37, 1403–1422. [Google Scholar] [CrossRef]
- Ohlmann, J.C.; Niiler, P.P. Circulation over the continental shelf in the northern Gulf of Mexico. Prog. Oceanogr. 2005, 64, 45–81. [Google Scholar] [CrossRef]
- Molcard, A.; Poulain, P.-M.; Forget, P.; Griffa, A.; Barbin, Y.; Gaggelli, J.; Maistre, J.; Michel, R. Comparison between VHF radar observations and data from drifter clusters in the Gulf of La Spezia (Mediterranean Sea). J. Mar. Syst. 2009, 78, S79–S89. [Google Scholar] [CrossRef]
- Kalampokis, A.; Uttieri, M.; Poulain, P.-M.; Zambianchi, E. Validation of HF Radar-Derived Currents in the Gulf of Naples with Lagrangian Data. IEEE Trans. Geosci. Remote Sens. 2016, 13, 1452–1456. [Google Scholar] [CrossRef]
- Capodici, F.; Cosoli, S.; Ciraolo, G.; Nasello, C.; Maltese, A.; Poulain, P.; Drago, A.; Azzopardi, J.; Gauci, A. Validation of HF radar sea surface currents in the Malta-Sicily Channel. Remote Sens. Environ. 2019, 225, 65–76. [Google Scholar] [CrossRef]
- Corgnati, L.; Mantovani, C.; Griffa, A.; Berta, M.; Penna, P.; Celentano, P.; Bellomo, L.; Carlson, D.F.; D’Adamo, R. Implementation and Validation of the ISMAR High-Frequency Coastal Radar Network in the Gulf of Manfredonia (Mediterranean Sea). IEEE J. Ocean. Eng. 2019, 44, 424–445. [Google Scholar] [CrossRef]
- Ohlmann, C.; White, P.; Washburn, L.; Emery, B.; Terrill, E.; Otero, M. Interpretation of Coastal HF Radar Derived Surface Currents with High-Resolution Drifter Data. J. Atmos. Ocean. Technol. 2007, 24, 666–680. [Google Scholar] [CrossRef]
- Davis, R.E. Drifter observations of coastal surface currents during CODE: The method and descriptive view. J. Geophys. Res. 1985, 90, 4741–4755. [Google Scholar] [CrossRef]
- Stewart, R.H.; Joy, J.W. HF radio measurements of surface currents. Deep Sea Res. I 1974, 21, 1039–1049. [Google Scholar]
- Astraldi, M.; Gasparini, G.P.; Manzella, G.M.R.; Hopkins, T.S. Temporal Variability of Currents in the Eastern Ligurian Sea. J. Geophys. Res. 1990, 95, 1515–1522. [Google Scholar] [CrossRef]
- Artale, V.; Astraldi, M.; Buffoni, G.; Gasparini, G.P. Seasonal variability of gyre-scale circulation in the Northern Tyrrhenian Sea. J. Geophys. Res. 1994, 99, 14127–14138. [Google Scholar] [CrossRef]
- Astraldi, M.; Bianchi, C.N.; Gasparini, G.P.; Morri, C. Climatic fluctuations, current variability and marine species distribution—A case-study in the Ligurian Sea (north-west Mediterranean). Oceanol. Acta 1995, 18, 139–149. [Google Scholar]
- Sciascia, R.; Magaldi, M.G.; Vetrano, A. Current reversal and associated variability within the Corsica Channel: The 2004 case study. Deep Sea Res. I 2019, 144, 39–51. [Google Scholar] [CrossRef]
- Iacono, R.; Napolitano, E. Aspects of the summer circulation in the eastern Ligurian Sea. Deep Sea Res. I 2020, 166, 103407. [Google Scholar]
- Copernicus Marine Environmental Monitoring Service (CMEMS). QA Best Practices and Protocols on QC for Radial and Total HF Radar Data (INCREASE WP3, D3.1); Copernicus Marine Environmental Monitoring Service (CMEMS)/Mercator Ocean: Ramonville Saint-Agne, France, 2017. [Google Scholar]
- CNR-ISMAR HF Radar Network. Available online: http://radarhf.ismar.cnr.it/OperatingNetwork.html (accessed on 22 November 2023).
- THREDDS Data Server-European High Frequency Radar Node. Available online: http://150.145.136.27:8080/thredds/HF_RADAR/HFradar_catalog.html (accessed on 22 November 2023).
- Bushnell, M.; Worthington, H. Manual for Real-Time Quality Control of High Frequency Radar Surface Current Data: A Guide to Quality Control and Quality Assurance for High Frequency Radar Surface Current Observations, Version 2.0; IOOS: Silver Spring, MD, USA, 2022; pp. 1–57. [Google Scholar]
- Cosoli, S.; Bolzon, G. A real-time and offline quality control methodology for SeaSonde high-frequency radar currents. J. Atmos. Ocean. Technol. 2012, 29, 1313–1328. [Google Scholar] [CrossRef]
- Cosoli, S.; Grcic, B. Quality Control Procedures for IMOS Ocean Radar Manual Version 2.1; Integrated Marine Observing System: Hobart, Australia, 2019. [Google Scholar] [CrossRef]
- Poulain, P.-M. Demonstration Experiment and Design of Network for Oceanographic and Acoustic Measurements; Memorandum Report CMRE-MR-2020-17; NATO-STO CMRE: La Spezia, Italy, 2020; p. 43. [Google Scholar]
- Poulain, P.-M.; Gerin, R.; Mauri, E.; Pennel, R. Wind Effects on Drogued and Undrogued Drifters in the Eastern Mediterranean. J. Atmos. Ocean. Technol. 2009, 26, 1144–1156. [Google Scholar] [CrossRef]
- Poulain, P.-M.; Gerin, R. Assessment of the Water-Following Capabilities of CODE Drifters Based on Direct Relative Flow Measurements. J. Atmos. Ocean. Technol. 2019, 36, 621–633. [Google Scholar] [CrossRef]
- Pacific Gyre Drifting Buoys. Available online: https://www.pacificgyre.com (accessed on 22 November 2023).
- Novelli, G.; Guigand, C.M.; Cousin, C.; Ryan, E.H.; Laxague, N.J.M.; Dai, H.; Haus, B.K.; Özgökmen, T.M. A Biodegradable Surface Drifter for Ocean Sampling on A Massive Scale. J. Atmos. Ocean. Technol. 2017, 34, 2509–2532. [Google Scholar] [CrossRef]
- Poulain, P.-M.; Centurioni, L.; Özgökmen, T. Comparing the Currents Measured by CARTHE, CODE and SVP Drifters as a Function of Wind and Wave Conditions in the Southwestern Mediterranean Sea. Sensors 2022, 22, 353. [Google Scholar] [CrossRef] [PubMed]
- Pawlowicz, R. “M_Map: A Mapping Package for MATLAB”, Version 1.4m, [Computer Software]. 2020. Available online: www.eoas.ubc.ca/~rich/map.html (accessed on 1 March 2025).
- Allard, D.; Chilès, J.-P.; Delfiner, P. Geostatistics: Modeling Spatial Uncertainty. Math. Geosci. 2013, 45, 377–380. [Google Scholar] [CrossRef]
- Cressie, N.A.C. Statistics for Spatial Data, Wiley Series in Probability and Statistics; John Wiley & Sons: New York, NY, USA, 1993; pp. 1–900. [Google Scholar] [CrossRef]
- Beegle-Krause, C.J. General NOAA Oil Modeling Environment (GNOME): A New Spill Trajectory Model. In Proceedings of the IOSC 2001, Tampa, FL, USA, 26–29 March 2001; pp. 865–871. [Google Scholar] [CrossRef]
- Emery, M.; Washburn, L. Evaluation of SeaSonde Hardware Diagnostic Parameters as Performance Metrics; NOAA: Silver Spring, MA, USA, 2007. [Google Scholar]
- Bellomo, L.; Griffa, A.; Cosoli, S.; Falco, P.; Gerin, R.; Iermano, I.; Zervakis, V. Toward an Integrated HF Radar Network in the Mediterranean Sea to Improve Search and Rescue and Oil Spill Response: The TOSCA Project Experience. J. Oper. Oceanogr. 2015, 8, 95–107. [Google Scholar]
- Röhrs, J.; Sperrevik, A.; Christensen, K.; Broström, G.; Breivik, Ø. Comparison of HF Radar Measurements with Eulerian and Lagrangian Surface Currents. Ocean Dyn. 2015, 65, 541–557. [Google Scholar] [CrossRef]
- Lorente, P.; Piedracoba, S.; Soto-Navarro, J.; Alvarez-Fanjul, E. Evaluating the surface circulation in the Ebro delta (northeastern Spain) with quality-controlled high-frequency radar measurements. Ocean Sci. 2015, 11, 921–935. [Google Scholar] [CrossRef]
- Paduan, J.; Kim, K.C.; Cook, M.S.; Chavez, F.P. Calibration and Validation of Direction-Finding High-Frequency Radar Ocean Surface Current Observations. IEEE J. Ocean. Eng. 2006, 31, 862–875. [Google Scholar] [CrossRef]
- Yoshikawa, Y.; Masuda, A.; Marubayashi, K.; Ishibashi, M.; Okuno, A. On the accuracy of HF radar measurement in the Tsushima Strait. J. Geophys. Res. 2006, 111, C4. [Google Scholar] [CrossRef]
- Atwater, P.; Heron, M. HF radar two-station baseline bisector comparisons of radial components. In Proceedings of the OCEANS’10 IEEE Sydney, Sydney, Australia, 24–28 May 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Laws, K.; Paduan, J.D.; Vesecky, J. Estimation and assessment of errors related to antenna pattern distortion in CODAR SeaSonde high-frequency radar ocean current measurements. J. Atmos. Ocean. Technol. 2010, 27, 1029–1043. [Google Scholar]
- Cosoli, S.; Bolzon, G. Accuracy of surface current mapping from High-Frequency (HF) ocean radars. B. Geofis. Teor. Appl. 2015, 56, 55–70. [Google Scholar] [CrossRef]
- Ullman, D.S.; O’Donnell, J.; Kohut, J.; Fake, T.; Allen, A. Trajectory prediction using HF radar surface currents: Monte Carlo simulations of prediction uncertainties. J. Geophys. Res. 2006, 111, C12. [Google Scholar] [CrossRef]
- Bouzaiene, M.; Menna, M.; Elhmaidi, D.; Dilmahamod, A.F.; Poulain, P.-M. Spreading of Lagrangian Particles in the Black Sea: A Comparison between Drifters and a High-Resolution Ocean Model. Remote Sens. 2021, 13, 2603. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H. Evaluation of trajectory modeling in different dynamic regions using normalized cumulative Lagrangian separation. J. Geophys. Res. 2011, 116, C09013. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| QC Parameters | Description |
|---|---|
| VART_QC (Variance Threshold Quality Flags) | This test labels radial vectors, whose temporal variance is larger than a maximum threshold, with a “bad data” flag, otherwise with a “good data” flag. Default threshold value is 1 m/s. |
| MDFL_QC (Median Filter) | For each source vector, the median of all velocities within a radius of <RCLim> and whose vector bearing (angle of arrival at site) is also within an angular distance of <AngLim> degrees from the source vector’s bearing is evaluated. If the difference between the vector’s velocity and the median velocity is greater than a threshold, then the vector is labeled with a “bad_data” flag. Otherwise, it is labeled with a “good_data” flag. Default threshold value is 1 m/s (with AngLim = 30° and RCLim = 5) |
| RDCT_QC (Radial Count Quality Flag) | Test labeling the entire data file having a number of radial velocity vectors larger than the threshold with a “good data” flag, otherwise with “bad data”. Default value is 200. |
| (CSPD_QC Maximum Velocity Threshold) | This test labels radial velocity vectors whose module is larger than a maximum velocity threshold with a “bad data” flag, otherwise with a “good data” flag. Default value is 1.2 m/s. |
| Sub-Track Extracted | Mean Interval [Days] | Min. Interval [Days] | Max. Interval [Days] |
|---|---|---|---|
| 88 | 4.2 | 1.01 | 12.96 |
| 705 | 12 | 12 | 12 |
| HF Radar | RMSE [m/s] | ρ [-] |
|---|---|---|
| TINO | 0.10 | 0.85 |
| TINO (filtered) | 0.10 | 0.89 |
| LIVO | 0.14 | 0.53 |
| LIVO (filtered) | 0.10 | 0.76 |
| SVIN | 0.15 | 0.37 |
| SVIN (Kriging) | 0.14 | 0.43 |
| HF Radar | RMSE [m/s] | ρ [-] |
|---|---|---|
| SVIN (thr < 2 w) | 0.14 | 0.47 |
| SVIN (thr ≤ 2 w) | 0.13 | 0.55 |
| SVIN | ||||||
|---|---|---|---|---|---|---|
| R1 (−15°) | R2 (−10°) | R3 (−5°) | R4 (0°) | R5 (+5°) | ||
| LIVO | R3 (−5°) | 0.24 | 0.53 | 0.57 | 0.24 | 0.33 |
| R4 (0°) | 0.27 | 0.37 | 0.33 | 0.36 | 0.04 | |
| R5 (+5°) | 0.63 | 0.69 | 0.66 | 0.60 | 0.17 | |
| R6 (10°) | 0.55 | 0.67 | 0.61 | 0.48 | 0.20 | |
| R7 (+15°) | 0.31 | 0.60 | 0.47 | 0.22 | 0.19 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doronzo, B.; Bendoni, M.; Taddei, S.; Boccacci, A.; Brandini, C. Validating HF Radar Current Accuracy via Lagrangian Measurements and Radar-to-Radar Comparisons in Highly Variable Surface Currents. Remote Sens. 2025, 17, 1243. https://doi.org/10.3390/rs17071243
Doronzo B, Bendoni M, Taddei S, Boccacci A, Brandini C. Validating HF Radar Current Accuracy via Lagrangian Measurements and Radar-to-Radar Comparisons in Highly Variable Surface Currents. Remote Sensing. 2025; 17(7):1243. https://doi.org/10.3390/rs17071243
Chicago/Turabian StyleDoronzo, Bartolomeo, Michele Bendoni, Stefano Taddei, Angelo Boccacci, and Carlo Brandini. 2025. "Validating HF Radar Current Accuracy via Lagrangian Measurements and Radar-to-Radar Comparisons in Highly Variable Surface Currents" Remote Sensing 17, no. 7: 1243. https://doi.org/10.3390/rs17071243
APA StyleDoronzo, B., Bendoni, M., Taddei, S., Boccacci, A., & Brandini, C. (2025). Validating HF Radar Current Accuracy via Lagrangian Measurements and Radar-to-Radar Comparisons in Highly Variable Surface Currents. Remote Sensing, 17(7), 1243. https://doi.org/10.3390/rs17071243