
A Mobile Triaxial Stabilized Ship-Borne Radiometric System for In Situ Measurements: Case Study of Sentinel-3 OLCI Validation in Highly Turbid Waters


Abstract
1. Introduction
2. The Ship-Borne Radiometric System MTS-WRMS
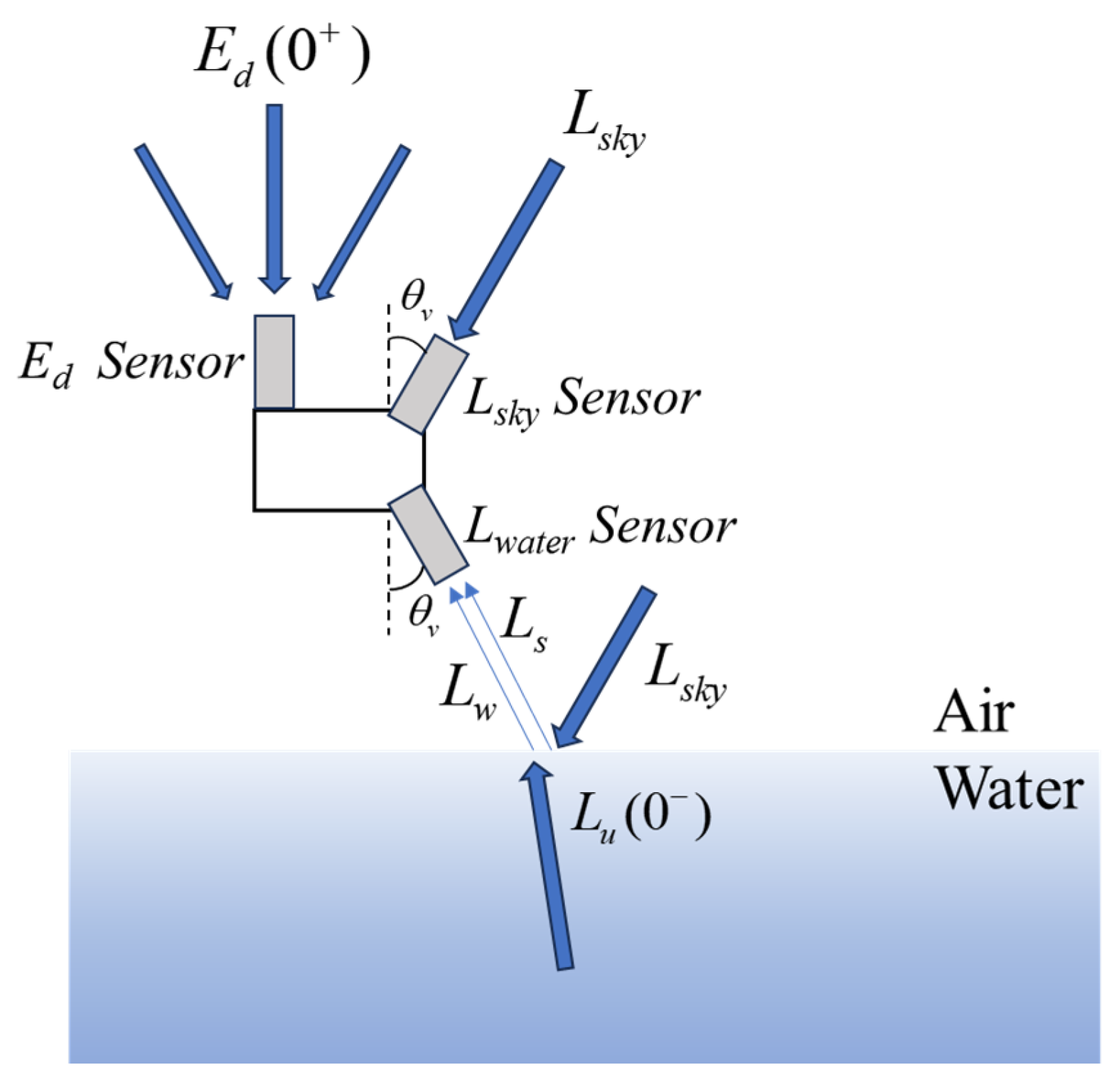
2.1. Measurement Theory for Above-Water Approach
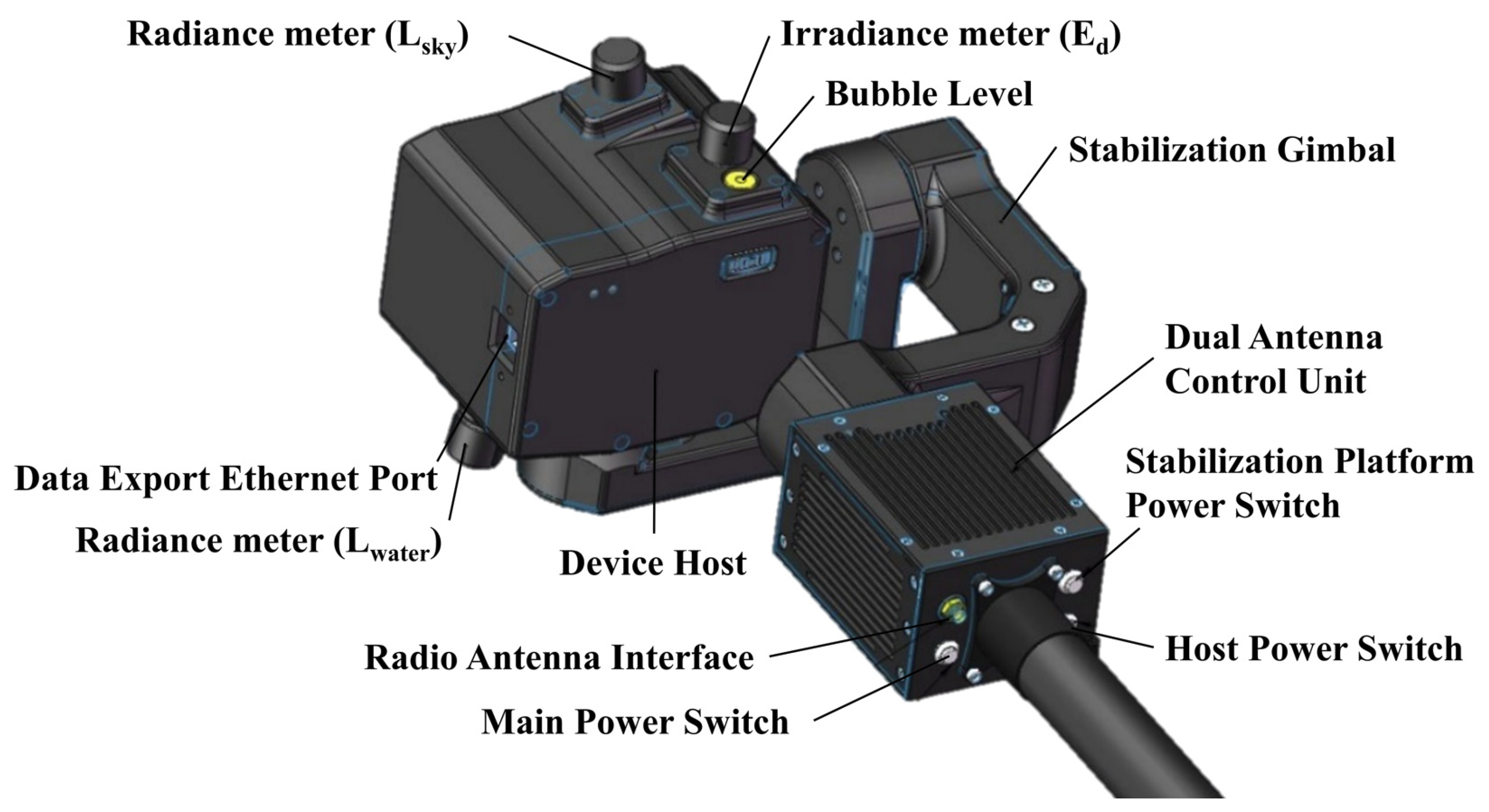
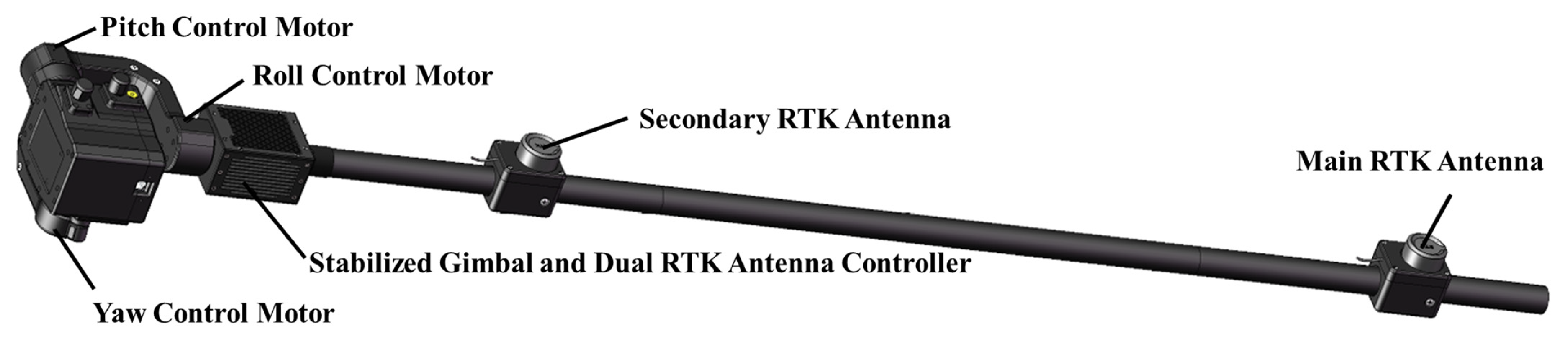
2.2. The Hardware Components
2.3. System Advantages
- The system is equipped with a triaxial stabilized gimbal that maintains a stable measurement angle. Experimental results indicate that the system achieves σpitch < 0.5°, σroll < 0.05°. Under mobile conditions, this design ensures higher accuracy in measuring Ed (0+, λ), Lwater (λ), and Lsky (λ);
- The system allows for automatic yaw angle adjustment, ensuring that the relative azimuth angle between the instrument’s observation plane and the solar radiance plane adheres to the optimal range of 90° ≤ φ ≤ 135°, effectively reducing sunglint interference and enhancing measurement accuracy.
- The foldable carbon fiber rod can extend the sensors 1 m beyond the vessel when deployed, reducing interference from hull shadows and vessel-generated waves, which enhances data reliability;
- The system supports long-distance wireless signal transmission, enabling autonomous real-time monitoring in both shore-based fixed-point measurements and ship-borne applications without the need for manual intervention.
2.4. Data Validation Approach
3. Materials and Methods
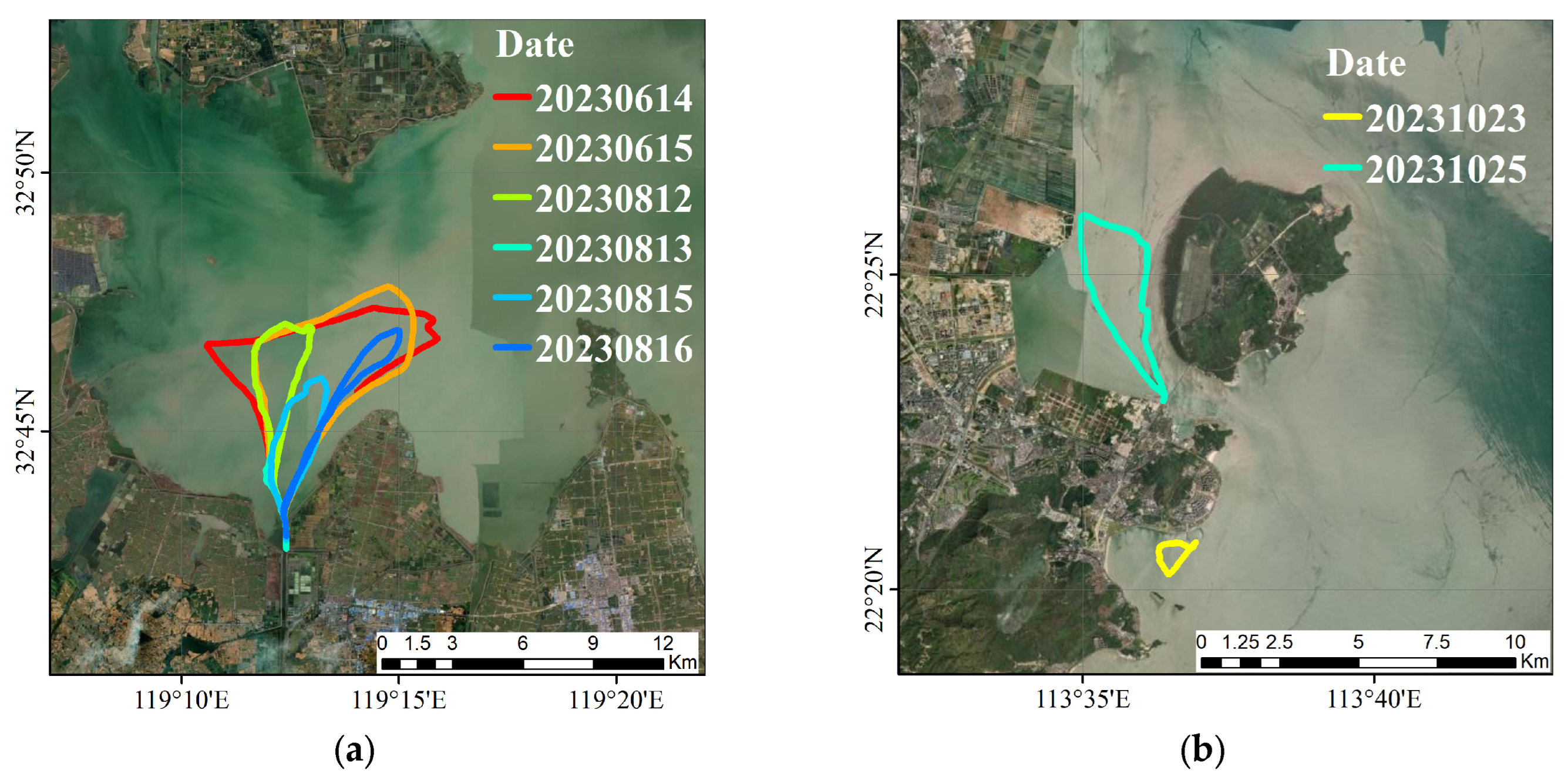
3.1. Study Area and Navigation Route
3.1.1. Gaoyou Lake
3.1.2. Zhuhai Nearshore Waters
3.2. Validation Experiment
3.3. The Matchup of Satellite Data and In Situ Data
3.4. Evaluation Methods
4. Results and Discussion
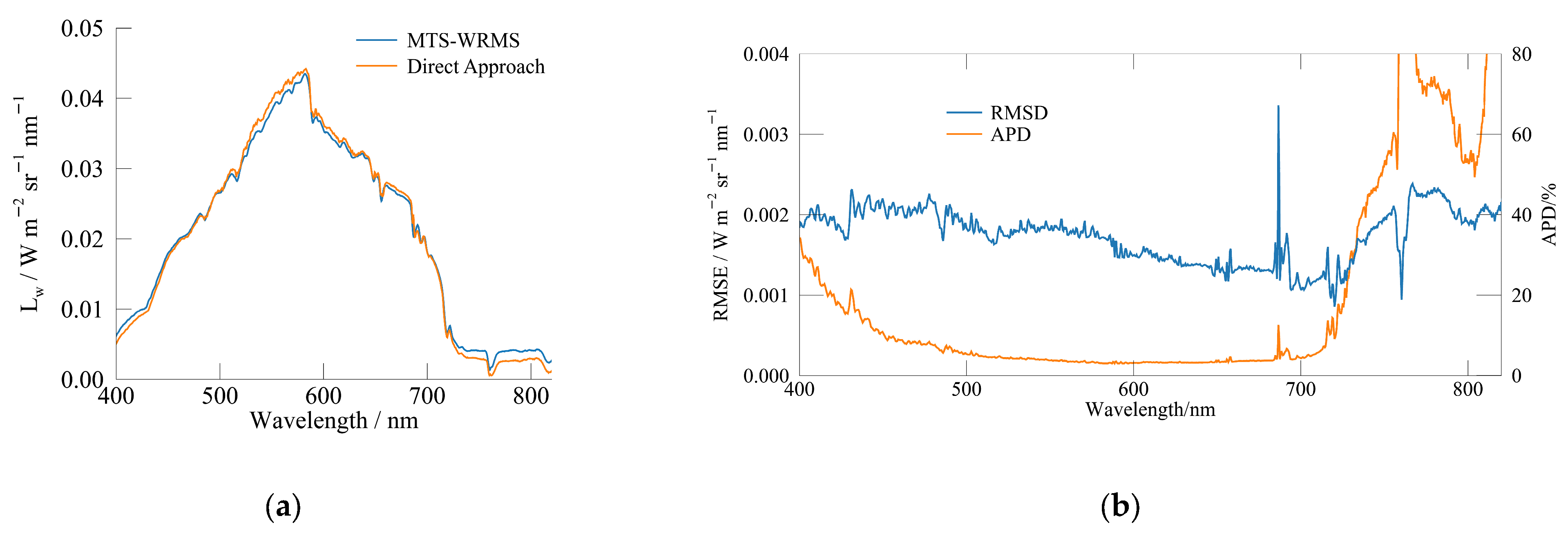
4.1. Validation of Data Reliability
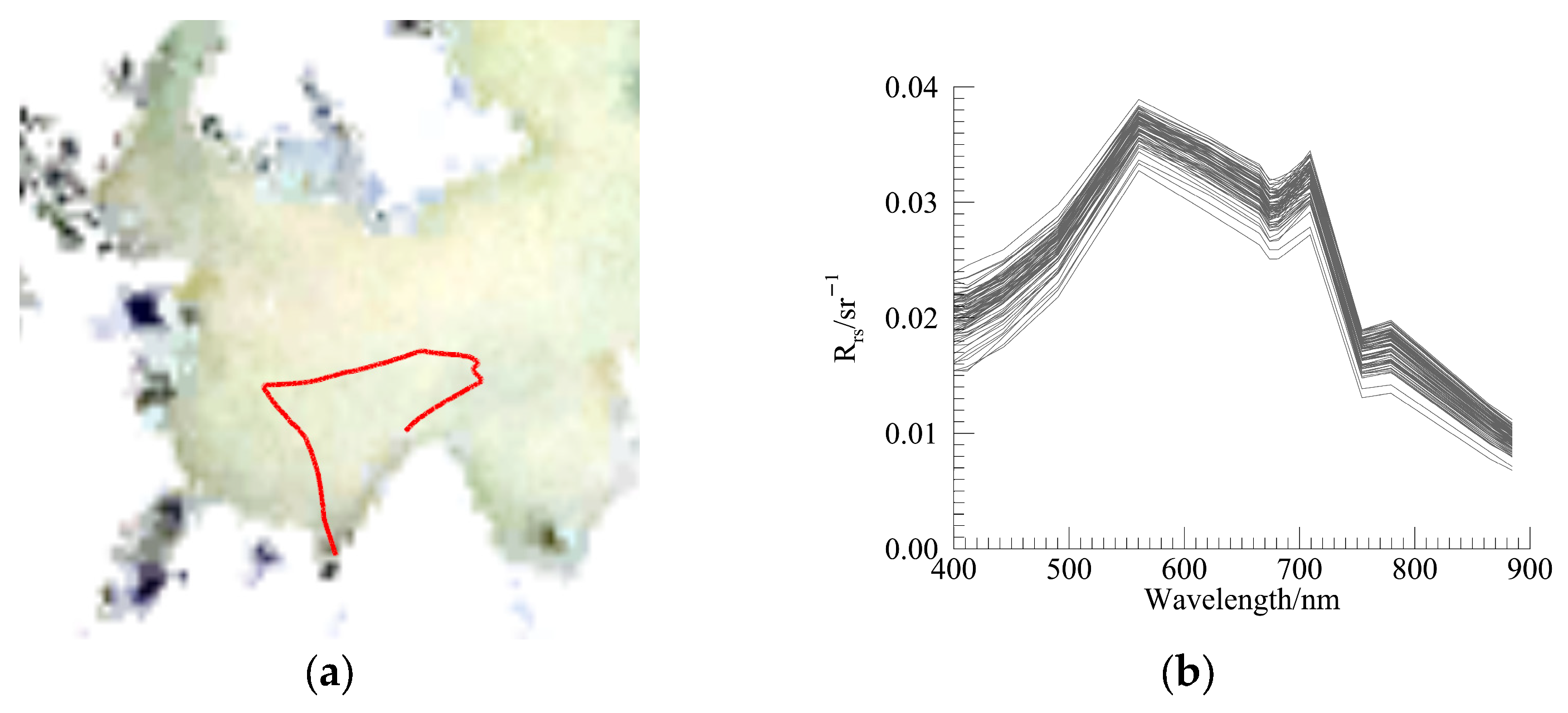
4.2. Spectral Characteristics of Study Areas
4.3. Deviation Analysis of In Situ Rrs Data
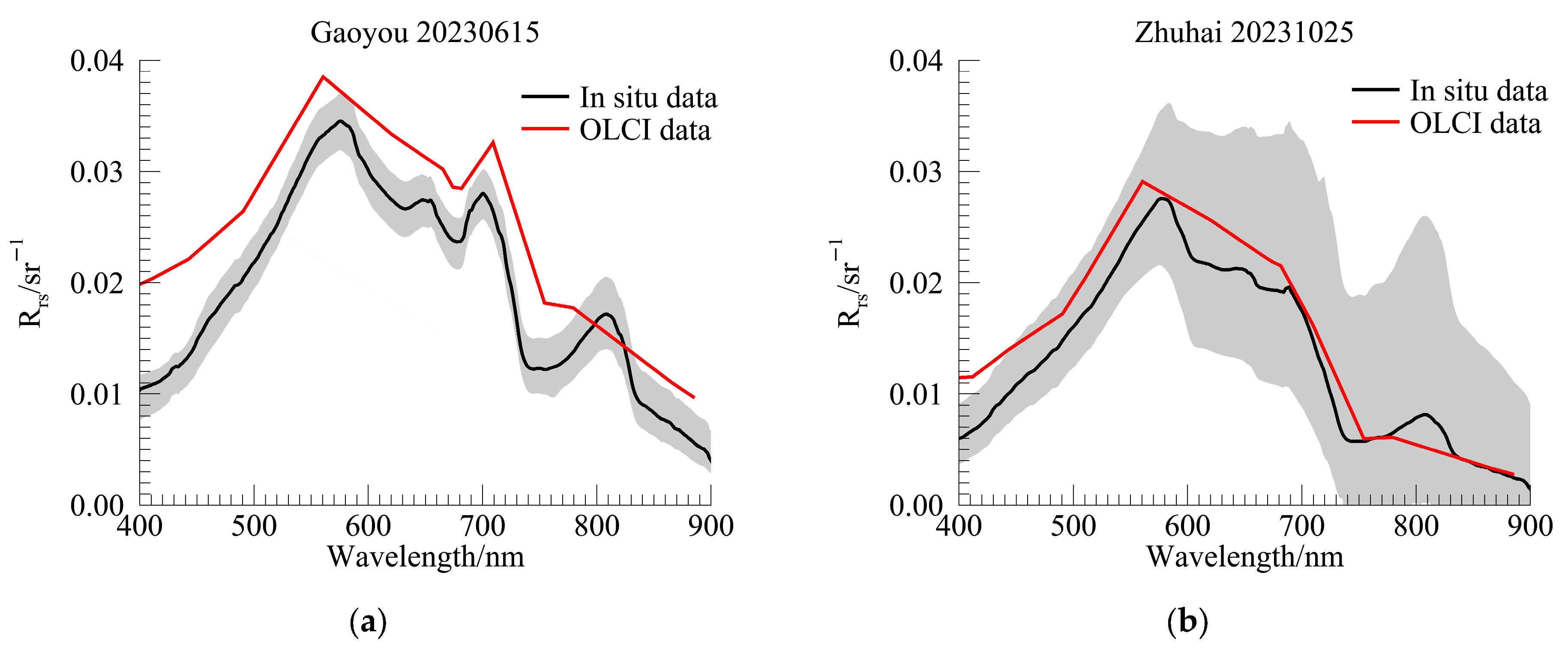
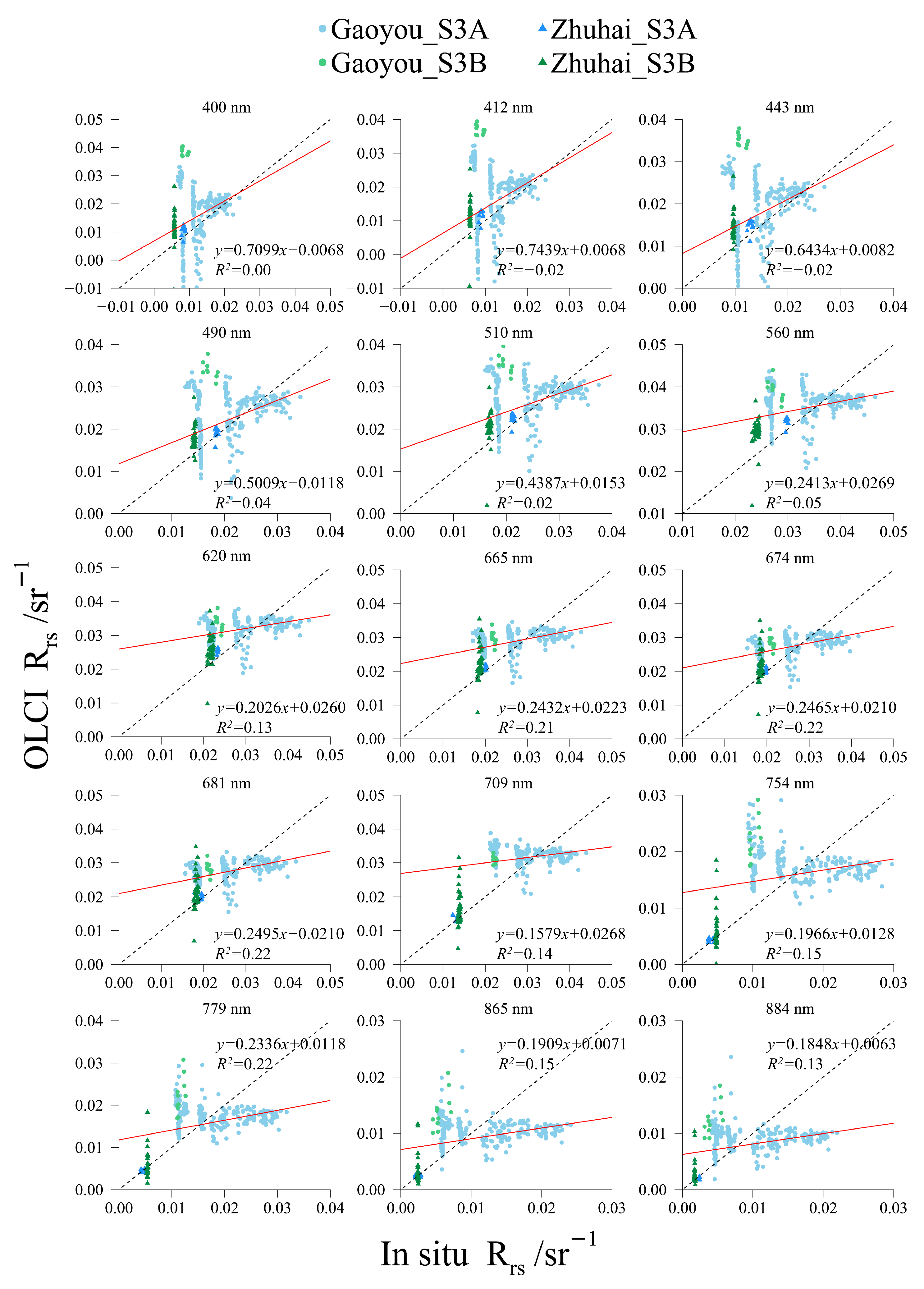
4.4. Consistency Analysis Between In Situ and OLCI Rrs Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- WHO. Guidelines for Drinking-Water Quality: Fourth Edition Incorporating the First and Second Addenda; WHO: Geneva, Switzerland, 2022; p. 614. [Google Scholar]
- FAO. The State of the World’s Land and Water Resources for Food and Agriculture (SOLAW): Systems at Breaking Point; FAO: Rome, Italy, 2021; p. 82. [Google Scholar]
- Hou, X.; Feng, L.; Dai, Y.; Hu, C.; Gibson, L.; Tang, J.; Lee, Z.; Wang, Y.; Cai, X.; Liu, J.; et al. Global mapping reveals increase in lacustrine algal blooms over the past decade. Nat. Geosci. 2022, 15, 130–134. [Google Scholar] [CrossRef]
- Sebastiá-Frasquet, M.-T.; Aguilar-Maldonado, J.-A.; Herrero-Durá, I.; Santamaría-del-Ángel, E.; Morell-Monzó, S.; Estornell, J. Advances in the monitoring of algal blooms by remote sensing: A bibliometric analysis. Appl. Sci. 2020, 10, 7877. [Google Scholar] [CrossRef]
- Wang, X.; Yang, W. Water quality monitoring and evaluation using remote sensing techniques in China: A systematic review. Ecosyst. Health Sustain. 2019, 5, 47–56. [Google Scholar]
- Ritchie, J.C.; Zimba, P.V.; Everitt, J.H. Remote sensing techniques to assess water quality. Photogramm. Eng. Remote Sens. 2003, 69, 695–704. [Google Scholar]
- Jiang, J. Remote Sensing Monitoring of Water Quality for Yuanhe River Inland Water. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2009. [Google Scholar]
- Adjovu, G.E.; Stephen, H.; James, D.; Ahmad, S. Overview of the application of remote sensing in effective monitoring of water quality parameters. Remote Sens. 2023, 15, 1938. [Google Scholar] [CrossRef]
- Usali, N.; Ismail, M.H. Use of remote sensing and GIS in monitoring water quality. J. Sustain. Dev. 2010, 3, 228. [Google Scholar]
- Fang, C. Remote Sensing Retrieval and Spatial and Temporal Evolution Analysis of International Boundary Lake Water Quality. Ph.D. Thesis, University of Chinese Academy of Sciences (Northeast Institute of Geography and Agroecology, Chinese Academy of Sciences), Beijing, China, 2021. [Google Scholar]
- Ruddick, K.G.; Voss, K.; Boss, E.; Castagna, A.; Frouin, R.; Gilerson, A.; Hieronymi, M.; Johnson, B.C.; Kuusk, J.; Lee, Z. A review of protocols for fiducial reference measurements of water-leaving radiance for validation of satellite remote-sensing data over water. Remote Sens. 2019, 11, 2198. [Google Scholar] [CrossRef]
- Gordon, H.R.; Brown, O.B.; Evans, R.H.; Brown, J.W.; Smith, R.C.; Baker, K.S.; Clark, D.K. A semianalytic radiance model of ocean color. J. Geophys. Res. Atmos. 1988, 93, 10909–10924. [Google Scholar]
- Pahlevan, N.; Mangin, A.; Balasubramanian, S.V.; Smith, B.; Alikas, K.; Arai, K.; Barbosa, C.; Bélanger, S.; Binding, C.; Bresciani, M.; et al. ACIX-Aqua: A global assessment of atmospheric correction methods for Landsat-8 and Sentinel-2 over lakes, rivers, and coastal waters. Remote Sens. Environ. 2021, 258, 112366. [Google Scholar] [CrossRef]
- Lee, Z.; Ahn, Y.-H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflectance from an above-surface platform. Opt. Express 2010, 18, 26313–26324. [Google Scholar] [CrossRef]
- Mueller, J.L.; Morel, A.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Lee, Z.; Steward, R.; Hooker, S.; Mobley, C. Ocean Optics Protocols For Satellite Ocean Color Sensor Validation, Revision 4. Volume III: Radiometric Measurements and Data Analysis Protocols. 2003. Available online: https://test.repository.oceanbestpractices.org/handle/11329/478 (accessed on 20 February 2025).
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [PubMed]
- Wang, X.; Li, T.; Tang, J.; Yang, A. Measurement and analysis of AOPs in case II waters with above-water method. J. Ocean Technol. 2004, 23, 1–6. [Google Scholar]
- Tang, J.; Tian, G.; Wang, X.; Wang, X.; Song, Q. The methods of water spectra measurement and analysis I: Above-water method. Natl. Remote Sens. Bull. 2004, 37–44. [Google Scholar]
- Lin, J.; Dall’Olmo, G.; Tilstone, G.H.; Brewin, R.J.; Vabson, V.; Ansko, I.; Evers-King, H.; Casal, T.; Donlon, C. Derivation of uncertainty budgets for continuous above-water radiometric measurements along an Atlantic Meridional Transect. Opt. Express 2022, 30, 45648–45675. [Google Scholar] [PubMed]
- Greenberg, E.; Thompson, D.R.; Jensen, D.; Townsend, P.A.; Queally, N.; Chlus, A.; Fichot, C.G.; Harringmeyer, J.P.; Simard, M. An improved scheme for correcting remote spectral surface reflectance simultaneously for terrestrial BRDF and water-surface sunglint in coastal environments. J. Geophys. Res. Biogeosci. 2022, 127, e2021JG006712. [Google Scholar]
- Antoine, D.; Guevel, P.; Deste, J.-F.; Becu, G.; Louis, F.; Scott, A.J.; Bardey, P. The “BOUSSOLE” buoy—A new transparent-to-swell taut mooring dedicated to marine optics: Design, tests, and performance at sea. J. Atmos. Ocean. Technol. 2008, 25, 968–989. [Google Scholar]
- Clark, D.K.; Yarbrough, M.A.; Feinholz, M.; Flora, S.; Broenkow, W.; Kim, Y.S.; Johnson, B.C.; Brown, S.W.; Yuen, M.; Mueller, J.L. MOBY, a radiometric buoy for performance monitoring and vicarious calibration of satellite ocean color sensors: Measurement and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation. Volume 6: Special Topics in Ocean Optics Protocols and Appendices; NASA: Washington, DC, USA, 2003. [Google Scholar]
- Morrow, J.H.; Hooker, S.B.; Booth, C.R.; Bernhard, G.; Lind, R.N.; Brown, J.W. Advances in measuring the apparent optical properties (AOPs) of optically complex waters. NASA Tech. Memo 2010, 215856, 42–50. [Google Scholar]
- Lin, H. Experimental Evaluation of the Self-Shadow And Its Correction for on-Water Measurements of Water-Leaving Radiance. Master’s Thesis, Xiamen University, Xiamen, China, 2022. [Google Scholar]
- Lee, Z.; Wei, J.; Shang, Z.; Garcia, R.; Dierssen, H.; Ishizaka, J.; Castagna, A. On-water radiometry measurements: Skylight-blocked approach and data processing. In Appendix to Protocols for Satellite Ocean Colour Data Validation: In Situ Optical Radiometry. IOCCG Ocean Optics and Biogeochemistry Protocols for Satellite Ocean Colour Sensor Validation; IOCCG: Dartmouth, NS, Canada, 2019; Volume 3, p. 7. [Google Scholar]
- Tian, L.; Li, S.; Sun, X.; Sun, Z.; Song, Q. Development and application of a portable floating optical buoy based on the skylight-blocked approach. Natl. Remote Sens. Bull. 2022, 26, 211–220. [Google Scholar]
- Arabi, B.; Salama, M.S.; Wernand, M.R.; Verhoef, W. Remote sensing of water constituent concentrations using time series of in-situ hyperspectral measurements in the Wadden Sea. Remote Sens. Environ. 2018, 216, 154–170. [Google Scholar]
- Xu, Y.; He, X.; Bai, Y.; Wang, D.; Zhu, Q.; Ding, X. Evaluation of Remote-Sensing Reflectance Products from Multiple Ocean Color Missions in Highly Turbid Water (Hangzhou Bay). Remote Sens. 2021, 13, 4267. [Google Scholar] [CrossRef]
- Vansteenwegen, D.; Ruddick, K.; Cattrijsse, A.; Vanhellemont, Q.; Beck, M. The pan-and-tilt hyperspectral radiometer system (PANTHYR) for autonomous satellite validation measurements—Prototype design and testing. Remote Sens. 2019, 11, 1360. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Atmospheric correction of Sentinel-3/OLCI data for mapping of suspended particulate matter and chlorophyll-a concentration in Belgian turbid coastal waters. Remote Sens. Environ. 2021, 256, 112284. [Google Scholar] [CrossRef]
- Zibordi, G.; Mélin, F.; Hooker, S.B.; D’Alimonte, D.; Holben, B. An autonomous above-water system for the validation of ocean color radiance data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 401–415. [Google Scholar]
- Kuusk, J.; Corizzi, A.; Doxaran, D.; Duong, K.; Flight, K.; Kivastik, J.; Laizans, K.; Leymarie, E.; Muru, S.; Penkerc’h, C. HYPSTAR: A hyperspectral pointable system for terrestrial and aquatic radiometry. Front. Remote Sens. 2024, 5, 1347507. [Google Scholar]
- Ruddick, K.G.; Brando, V.E.; Corizzi, A.; Dogliotti, A.I.; Doxaran, D.; Goyens, C.; Kuusk, J.; Vanhellemont, Q.; Vansteenwegen, D.; Bialek, A. WATERHYPERNET: A prototype network of automated in situ measurements of hyperspectral water reflectance for satellite validation and water quality monitoring. Front. Remote Sens. 2024, 5, 1347520. [Google Scholar]
- Hommersom, A.; Kratzer, S.; Laanen, M.; Ansko, I.; Ligi, M.; Bresciani, M.; Giardino, C.; Beltrán-Abaunza, J.M.; Moore, G.; Wernand, M. Intercomparison in the field between the new WISP-3 and other radiometers (TriOS Ramses, ASD FieldSpec, and TACCS). J. Appl. Remote Sens. 2012, 6, 063615. [Google Scholar]
- Carswell, T.; Costa, M.; Young, E.; Komick, N.; Gower, J.; Sweeting, R. Evaluation of MODIS-Aqua atmospheric correction and chlorophyll products of Western North American coastal waters based on 13 years of data. Remote Sens. 2017, 9, 1063. [Google Scholar] [CrossRef]
- Brando, V.E.; Lovell, J.L.; King, E.A.; Boadle, D.; Scott, R.; Schroeder, T. The potential of autonomous ship-borne hyperspectral radiometers for the validation of ocean color radiometry data. Remote Sens. 2016, 8, 150. [Google Scholar] [CrossRef]
- Gleratti, G.; Martinez-Vicente, V.; Atwood, E.C.; Simis, S.G.; Jackson, T. Validation of full resolution remote sensing reflectance from Sentinel-3 OLCI across optical gradients in moderately turbid transitional waters. Front. Remote Sens. 2024, 5, 1359709. [Google Scholar]
- Bailey, S.W.; Werdell, P.J. A multi-sensor approach for the on-orbit validation of ocean color satellite data products. Remote Sens. Environ. 2006, 102, 12–23. [Google Scholar]
- Gitelson, A.A.; Schalles, J.F.; Hladik, C.M. Remote chlorophyll-a retrieval in turbid, productive estuaries: Chesapeake Bay case study. Remote Sens. Environ. 2007, 109, 464–472. [Google Scholar]
- Wang, J.; Sun, D.; Wang, S.; Li, Z.; Zhang, Y.; Li, J.; Zhang, H. Satellite observations of suspended particulate matter concentration in Lake Gaoyou in the past four decades. Water Res. 2024, 254, 121442. [Google Scholar] [PubMed]
- Li, S.; Guo, W.; Yin, Y.; Jin, X.; Tang, W. Environmental changes inferred from lacustrine sediments and historical literature: A record from Gaoyou Lake, eastern China. Quat. Int. 2015, 380, 350–357. [Google Scholar]
- Qu, X.; Chen, Y.; Liu, H.; Xia, W.; Lu, Y.; Gang, D.-D.; Lin, L.-S. A holistic assessment of water quality condition and spatiotemporal patterns in impounded lakes along the eastern route of China’s South-to-North water diversion project. Water Res. 2020, 185, 116275. [Google Scholar] [PubMed]
- Zhang, L.; Cheng, Y.; Niu, Y.; Jiang, J. Analysis and prediction of eutrophication for advanced warning of the water quality concerns in Gaoyou Lake. Water Supply 2020, 20, 186–196. [Google Scholar]
- Wang, H.; Dai, Y.; Chen, Y.; Zhang, K.; Gao, Q.; Bai, S. Spatiotemporal Evolution and Cause Analysis of Potamogeton crispus L. in Gaoyou Lake Based on Multispectral Remote Sensing Technology. Adm. Tech. Environ. Monit. 2024, 36, 78–82+87. [Google Scholar]
- Chen, Y.; Chen, Z.; Zou, L.; Wang, H. Remote Sensing Inversion of Chlorophyll-a Concentration and Total Suspended Matter Concentration in Gaoyou Lake Based on Sentinel-2 MSI Data. Environ. Monit. Forewarning 2024, 16, 21–28. [Google Scholar]
- Chen, Y.; Chen, Z.; Ma, D.; Yin, H.; Wu, C. Remote Sensing Estimation of Water Quality Parameters in Gaoyou Lakebased on Sentinel-2 MSIData. Environ. Sci. Manag 2022, 47, 77–81. [Google Scholar]
- Cai, P.; Liu, R.; Gao, M.; Chen, B.; Gao, Y. Spatial-temporal changes and driving factors of water quality in Gaoyou Lake from 2009 to 2021. Jiangsu Water Resour. 2023, 4–9. [Google Scholar]
- Tian, C.; Guo, C.; Wu, X. Distribution of submerged plants and its relationship with environmental factors in Gaoyou Lake. Acta Hydrobiol. Sin. 2019, 43, 423–430. [Google Scholar]
- Wu, C.S.; Yang, S.; Huang, S.; Mu, J. Delta changes in the Pearl River estuary and its response to human activities (1954–2008). Quat. Int. 2016, 392, 147–154. [Google Scholar]
- Huang, X.; Huang, L.; Yue, W. The characteristics of nutrients and eutrophication in the Pearl River estuary, South China. Mar. Pollut. Bull. 2003, 47, 30–36. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Zhou, W.; Ye, S.; Li, C. Research on the potential suitable habitat of mangroves analysis in Zhuhai city based on MaxEnt modeling. J. Cent. South Univ. For. Technol. 2023, 43, 35–43. [Google Scholar]
- Qiu, N.; Xu, S.; Qiu, P.; Yang, W.; Yang, X.; Yang, Q. Community distribution and landscape pattern of the mangrove on the Qi’ao Island, Zhuhai. Scientia Silvae Sinicae 2019, 55, 1–10. [Google Scholar]
- Ruddick, K.G.; De Cauwer, V.; Park, Y.-J.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef]
- Lin, J.; Lee, Z.; Tilstone, G.H.; Liu, X.; Wei, J.; Ondrusek, M.; Groom, S. Revised spectral optimization approach to remove surface-reflected radiance for the estimation of remote-sensing reflectance from the above-water method. Opt. Express 2023, 31, 22964–22981. [Google Scholar] [CrossRef]
- Smith, R.C.; Baker, K.S. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef]
- Kuang, R. Remote Sensing Model of Ocean Colour Parameters in Yangtze Estuary. Ph.D. Thesis, East China Normal University, Shanghai, China, 2010. [Google Scholar]
- Deng, R.; He, Y.; Qin, Y.; Chen, Q.; Chen, L. Pure water absorption coefficient measurement after eliminating the impact of suspended substance in spectrum from 400 nm to 900 nm. Yaogan Xuebao-J. Remote Sens. 2012, 16, 174–191. [Google Scholar]
- Wei, J.; Lee, Z.; Garcia, R.; Zoffoli, L.; Armstrong, R.A.; Shang, Z.; Sheldon, P.; Chen, R.F. An assessment of Landsat-8 atmospheric correction schemes and remote sensing reflectance products in coral reefs and coastal turbid waters. Remote Sens. Environ. 2018, 215, 18–32. [Google Scholar] [CrossRef]
- Soppa, M.A.; Silva, B.; Steinmetz, F.; Keith, D.; Scheffler, D.; Bohn, N.; Bracher, A. Assessment of polymer atmospheric correction algorithm for hyperspectral remote sensing imagery over coastal waters. Sensors 2021, 21, 4125. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | HYPSTAR | RAMSES | WISP-3 | HyperSAS | DALEC | MTS-WRMS |
|---|---|---|---|---|---|---|
| Number of sensors | 1 | 3 | 3 | 1 | 3 | 3 |
| Deployment method | Fixed | Fixed | Handheld | Mobile | Mobile | Mobile |
| Spectral resolution/nm | 3 | 10 | 4.9 | 10 | 10 | 2 |
| Spectral sampling interval/nm | 0.5 | 3.3 | 0.4 | 3.3 | 3.3 | 0.4 |
| Number of bands | 2048 | 256 | 2048 | 256 | 256 | 2048 |
| Field of View (FOV) | 2° | 7° | 3° | 6° | 5° | 8° |
| Automatic horizontal orientation adjustment | Yes | No | - | Yes | No | Yes |
| Satellite | Experimental Date | Experimental Location | Satellite Image Acquisition Time | In Situ Measurement Time | Number of Matched Pixels | Average Wind Speed (m/s) |
|---|---|---|---|---|---|---|
| Sentinel-3 A | 14 June 2023 | Gaoyou | 10:21:07 | 08:51:26–11:35:21 | 79 | 2.8 |
| 15 June 2023 | Gaoyou | 09:54:57 | 08:57:11–11:10:39 | 41 | 1.5 | |
| 12 August 2023 | Gaoyou | 09:51:07 | 10:01:35–11:58:36 | 48 | 2.5 | |
| 15 August 2023 | Gaoyou | 10:13:32 | 10:01:19–11:35:54 | 37 | 2.6 | |
| 16 August 2023 | Gaoyou | 09:47:21 | 09:50:47–11:32:19 | 30 | 0.8 | |
| 23 October 2023 | Zhuhai | 10:27:50 | 10:23:16–11:19:59 | 11 | 3.4 | |
| Sentinel-3 B | 13 August 2023 | Gaoyou | 10:27:04 | 10:29:23–11:40:20 | 11 | 2.7 |
| 25 October 2023 | Zhuhai | 10:37:34 | 09:43:30–11:03:21 | 36 | 3.0 |
| Gaoyou | Zhuhai | ||||
|---|---|---|---|---|---|
| Date | CV/% | Date | CV/% | Date | CV/% |
| 14 June | 2.97 | 13 August | 1.15 | 23 October | 3.00 |
| 15 June | 2.59 | 15 August | 2.38 | 25 October | 2.87 |
| 12 August | 1.10 | 16 August | 0.55 | ||
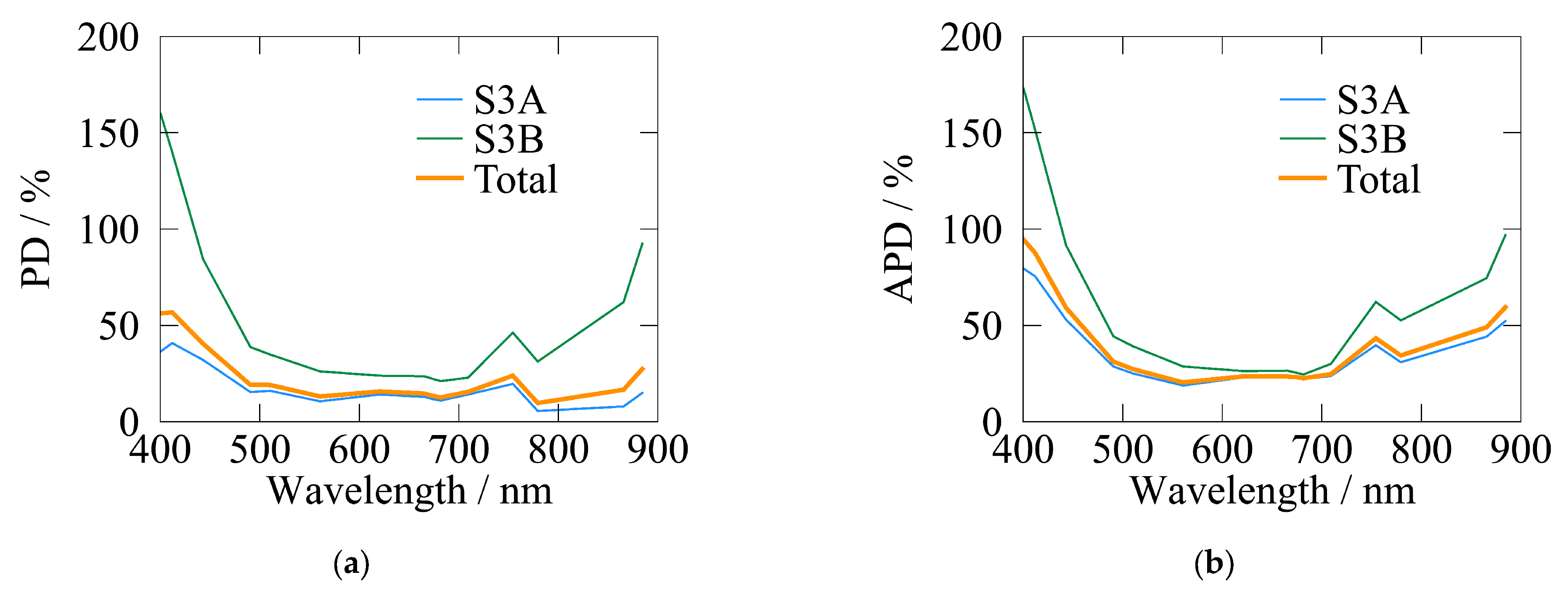
| PD/% | Wavelength/nm | 400 | 412 | 443 | 490 | 510 | 560 | 620 | 665 |
| S3A | 36.45 | 40.83 | 32.04 | 15.38 | 16.03 | 10.61 | 14.13 | 12.88 | |
| S3B | 159.76 | 139.95 | 84.31 | 38.74 | 34.86 | 26.12 | 23.91 | 23.59 | |
| Total | 56.23 | 56.73 | 40.42 | 19.13 | 19.05 | 13.09 | 15.7 | 14.6 | |
| Wavelength/nm | 674 | 681 | 709 | 754 | 779 | 865 | 884 | WPD | |
| S3A | 11.7 | 10.95 | 14.11 | 19.65 | 5.58 | 7.93 | 14.98 | 15.82 | |
| S3B | 22.2 | 21.07 | 22.85 | 46.26 | 31.25 | 62.07 | 92.44 | 39.84 | |
| Total | 13.38 | 12.58 | 15.51 | 23.92 | 9.7 | 16.62 | 27.4 | 20.2 | |
| APD/% | Wavelength/nm | 400 | 412 | 443 | 490 | 510 | 560 | 620 | 665 |
| S3A | 79.47 | 75.46 | 52.94 | 28.66 | 25 | 18.8 | 22.98 | 22.86 | |
| S3B | 172.87 | 151.5 | 91.52 | 44.29 | 39.1 | 28.68 | 26.31 | 26.5 | |
| Total | 94.45 | 87.65 | 59.13 | 31.17 | 27.26 | 20.38 | 23.52 | 23.44 | |
| Wavelength/nm | 674 | 681 | 709 | 754 | 779 | 865 | 884 | WAPD | |
| S3A | 22.74 | 22.19 | 23.72 | 39.72 | 30.91 | 44.17 | 52.26 | 31.84 | |
| S3B | 25.42 | 24.55 | 30.07 | 62.18 | 52.6 | 74.52 | 96.85 | 45.5 | |
| Total | 23.17 | 22.57 | 24.74 | 43.32 | 34.39 | 49.04 | 59.41 | 34.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H.; Zhang, P.; Guan, H.; Zhao, Y. A Mobile Triaxial Stabilized Ship-Borne Radiometric System for In Situ Measurements: Case Study of Sentinel-3 OLCI Validation in Highly Turbid Waters. Remote Sens. 2025, 17, 1223. https://doi.org/10.3390/rs17071223
Jiang H, Zhang P, Guan H, Zhao Y. A Mobile Triaxial Stabilized Ship-Borne Radiometric System for In Situ Measurements: Case Study of Sentinel-3 OLCI Validation in Highly Turbid Waters. Remote Sensing. 2025; 17(7):1223. https://doi.org/10.3390/rs17071223
Chicago/Turabian StyleJiang, Haoran, Peng Zhang, Hong Guan, and Yongchao Zhao. 2025. "A Mobile Triaxial Stabilized Ship-Borne Radiometric System for In Situ Measurements: Case Study of Sentinel-3 OLCI Validation in Highly Turbid Waters" Remote Sensing 17, no. 7: 1223. https://doi.org/10.3390/rs17071223
APA StyleJiang, H., Zhang, P., Guan, H., & Zhao, Y. (2025). A Mobile Triaxial Stabilized Ship-Borne Radiometric System for In Situ Measurements: Case Study of Sentinel-3 OLCI Validation in Highly Turbid Waters. Remote Sensing, 17(7), 1223. https://doi.org/10.3390/rs17071223