
Spaceborne GNSS Reflectometry for Vegetation and Inland Water Monitoring: Progress, Challenges, Opportunities, and Potential



Abstract
1. Introduction
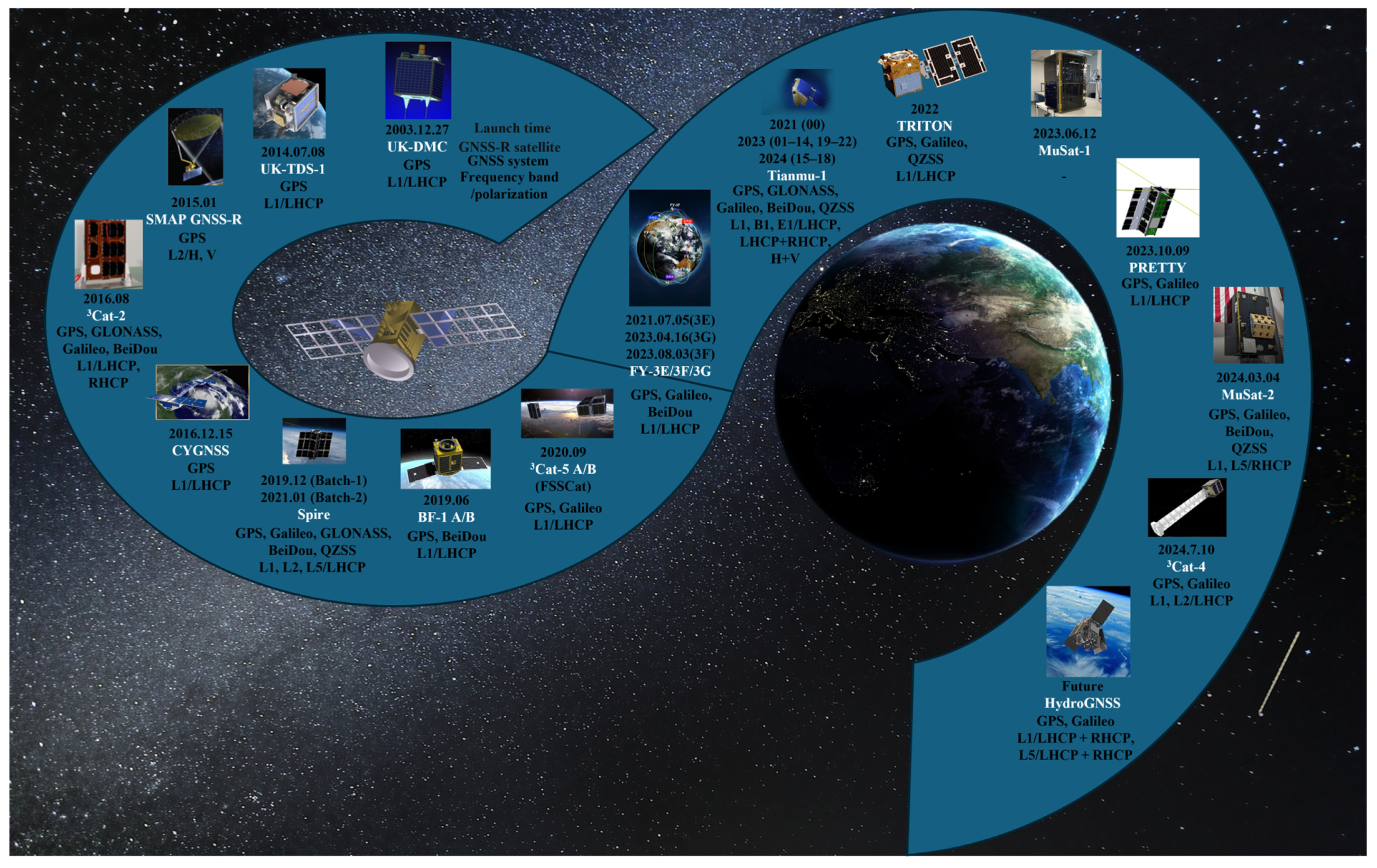
2. Current Status of Spaceborne GNSS-R Microsatellites

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Sensor | Spatial Resolution | Temporal Resolution (Revisit Time) | Typical Applications | Data Coverage Ranges |
|---|---|---|---|---|---|
| UK-DMC-1 [25] | The GPS reflectometry payload | - | - | wind speed and wave [67]. | Partial sea area |
| UK-TDS-1 [26] | A Space GPS receiver remote sensing instrument (SGR-ReSI) | - | More than 24 h | Ocean wind speed search, SM [68], monitoring of inland water bodies [69], water level [70], and sea ice [71]. | - |
| CYGNSS [27] | Delay Doppler mapping instrument (DDMI) | 25 km × 25 km | The average revisit time is about 7 h. | VWC [6], VOD [72], AGB, canopy height (CH) [7], water levels [73], river width and gradient [74], surface wind speed [75], red tide [76], SM [77], and flood monitoring [78]. | North Bounding Coordinate: 40 degrees South Bounding Coordinate: −40 degrees West Bounding Coordinate: −180 degrees East Bounding Coordinate: 180 degrees |
| 3Cat-2 [79] | The P(Y) and C/A reflectometer (PYCARO) | 30 km | Revisit cycle less than 2 days | SM, AGB, altimetry, and surface wind speed [60]. | - |
| SMAP GNSS-R [59] | The SMAP radar receiver | - | - | VWC [80], aboveground biomass (AGB) [59], F/T [81]. | - |
| BuFeng-1 A/B [62] | One direct antenna, two 26-degree-tilted reflector high-gain antennas, and a GNSS-R receiver | - | - | - | From 53°S to 53°N |
| Spire [22,34,61,82,83] | A STRATOS dual-frequency GNSS receiver | - | - | The monitoring of inland water bodies [36], water levels [84], slope [85], SM [86], altimetry [33], and sea ice [34]. | Batch-1: [−37,37] Batch-2: Global |
| FengYun-3E/3F/3G [30,31,87] | GNSS Radio Occultation Sounder II (GNOS II) | 7 km × 0.5 km (on land) | approximately 1–2 days (at 36 km) | SM [87]. | - |
| 3Cat-5 A/B (FSSCat) [28] | Flexible Microwave PayLoad 2 (FMPL-2) | 300 km to 40 m | daily | Soil moisture (SM), sea ice extent (SIE), concentration and thickness, and even wind speed [88]. | Global |
| 3Cat-4 [66] | Flexible Microwave PayLoad 1 (FMPL-1) | Sub kilometer | Global coverage the next day | - | - |
| PRETTY [65,89,90] | A passive GNSS-based reflectometer and dosimeter | Daily coverage of the polar region | Altimeter [91]. | Global | |
| TRITON (FORMOSAT-7R) [64,92,93] | The receiver is capable of handling the dispersed GPS, Galileo, and QZSS signals. | 0.5. km to 25 km or 0.5 km to 40 km | - | surface wind speed [94]. | - |
| HydroGNSS [19] | Delay Doppler mapping receiver (DDMR) | 25 km | 15 days | SM, AGB [95], F/T [19], flooded, or wetland [96]. | Global |
| Tianmu-1 [23,97,98] | GNOS-M | Better than 25 km | Sampling approximately once every 1 s | surface wind speed [98]. | - |
| MuSat-1 [56] | - | - | - | - | - |
| MuSat-2 [99] | A high-gain, beamforming GNSS-R payload | - | - | SM, Surface wind speed, the presence of vegetation or wetlands, and sea ice characteristics [38,57]. | - |
3. Vegetation Remote Sensing
3.1. Sensitivity Analysis of Spaceborne GNSS-R to Vegetation
3.2. Vegetation Water Content
3.3. Vegetation Optical Depth
3.4. Forest Aboveground Biomass and Canopy Height
4. Retrieval of Physical Parameters of Inland Water Bodies
4.1. Detection of Inland Water Bodies
4.2. Water Level
4.3. River Width and Slope
4.4. Surface Wind Speed and Wave Height over Inland Water
5. Retrieval of Environmental Parameters of Inland Water Bodies
5.1. Red Tide
5.2. Wetland
5.3. Surface Water
6. Discussion
7. Summary and Future Prospects
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Allan, R.P.; Arias, P.A.; Berger, S.; Canadell, J.G.; Cassou, C.; Chen, D.; Cherchi, A.; Connors, S.L.; Coppola, E.; Cruz, F.A. Intergovernmental panel on climate change (IPCC). Summary for policymakers. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2023; pp. 3–32. [Google Scholar]
- Wheater, H.S.; Gober, P. Water security and the science agenda. Water Resour. Res. 2015, 51, 5406–5424. [Google Scholar] [CrossRef]
- Gaberščik, A.; Murlis, J. The role of vegetation in the water cycle. Ecohydrol. Hydrobiol. 2011, 11, 175–181. [Google Scholar] [CrossRef]
- McElrone, A.J.; Choat, B.; Gambetta, G.A.; Brodersen, C.R. Water uptake and transport in vascular plants. Nat. Educ. Knowl. 2013, 4, 6. [Google Scholar]
- Zhang, J.; Morton, Y.J. Inland water body surface height retrievals using CYGNSS delay doppler maps. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Chen, F.; Liu, L.; Guo, F.; Huang, L. A New Vegetation Observable Derived from Spaceborne GNSS-R and Its Application to Vegetation Water Content Retrieval. Remote Sens. 2024, 16, 931. [Google Scholar] [CrossRef]
- Chen, F.; Guo, F.; Liu, L.; Nan, Y. An Improved Method for Pan-Tropical Above-Ground Biomass and Canopy Height Retrieval Using CYGNSS. Remote Sens. 2021, 13, 2491. [Google Scholar] [CrossRef]
- Jin, S.; Camps, A.; Jia, Y.; Wang, F.; Martin-Neira, M.; Huang, F.; Yan, Q.; Zhang, S.; Li, Z.; Edokossi, K.; et al. Remote sensing and its applications using GNSS reflected signals: Advances and prospects. Satell. Navig. 2024, 5, 19. [Google Scholar] [CrossRef]
- Jin, S.; Komjathy, A. GNSS reflectometry and remote sensing: New objectives and results. Adv. Space Res. 2010, 46, 111–117. [Google Scholar] [CrossRef]
- Jin, S.; Feng, G.P.; Gleason, S. Remote sensing using GNSS signals: Current status and future directions. Adv. Space Res. 2011, 47, 1645–1653. [Google Scholar] [CrossRef]
- Camps, A.; Rodriguez-Alvarez, N.; Valencia, E.; Forte, G.; Ramos, I.; Alonso-Arroyo, A.; Bosch-Lluis, X. Land monitoring using GNSS-R techniques: A review of recent advances. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 4026–4029. [Google Scholar]
- Yu, K.; Rizos, C.; Burrage, D.; Dempster, A.G.; Zhang, K.; Markgraf, M. An overview of GNSS remote sensing. EURASIP J. Adv. Signal Process. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea ice remote sensing using GNSS-R: A review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef]
- Edokossi, K.; Calabia, A.; Jin, S.; Molina, I. GNSS-Reflectometry and Remote Sensing of Soil Moisture: A Review of Measurement Techniques, Methods, and Applications. Remote Sens. 2020, 12, 614. [Google Scholar] [CrossRef]
- Wu, X.; Ma, W.; Xia, J.; Bai, W.; Jin, S.; Calabia, A. Spaceborne GNSS-R soil moisture retrieval: Status, development opportunities, and challenges. Remote Sens. 2020, 13, 45. [Google Scholar] [CrossRef]
- Wu, X.; Guo, P.; Sun, Y.; Liang, H.; Zhang, X.; Bai, W. Recent Progress on Vegetation Remote Sensing Using Spaceborne GNSS-Reflectometry. Remote Sens. 2021, 13, 4244. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Camps, A.; Ruf, C.; Floury, N.; Martin-Neira, M.; Wang, T.; Khalsa, S.J.; Clarizia, M.P.; Reynolds, J.; Johnson, J.; et al. The IEEE-SA Working Group on Spaceborne GNSS-R: Scene Study. IEEE Access 2021, 9, 89906–89933. [Google Scholar] [CrossRef]
- Euriques, J.F.; Krueger, C.P.; Machado, W.C.; Sapucci, L.F.; Geremia-Nievinski, F. Soil moisture estimation with gnss reflectometry: A conceptual review. Rev. Bras. De Cartogr. 2021, 73, 413–434. [Google Scholar]
- Unwin, M.J.; Pierdicca, N.; Cardellach, E.; Rautiainen, K.; Foti, G.; Blunt, P.; Guerriero, L.; Santi, E.; Tossaint, M. An Introduction to the HydroGNSS GNSS Reflectometry Remote Sensing Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6987–6999. [Google Scholar] [CrossRef]
- Pierdicca, N.; Comite, D.; Camps, A.; Carreno-Luengo, H.; Cenci, L.; Clarizia, M.P.; Costantini, F.; Dente, L.; Guerriero, L.; Mollfulleda, A.; et al. The Potential of Spaceborne GNSS Reflectometry for Soil Moisture, Biomass, and Freeze–Thaw Monitoring: Summary of a European Space Agency-funded study. IEEE Geosci. Remote Sens. Mag. 2022, 10, 8–38. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Morris, M. Latest Advances in the Global Navigation Satellite System—Reflectometry (GNSS-R) Field. Remote Sens. 2023, 15, 2157. [Google Scholar] [CrossRef]
- Setti, P.T., Jr.; Tabibi, S. Evaluation of Spire GNSS-R reflectivity from multiple GNSS constellations for soil moisture estimation. Int. J. Remote Sens. 2023, 44, 6422–6441. [Google Scholar] [CrossRef]
- Bu, J.; Wang, Q.; Wang, Z.; Fan, S.; Liu, X.; Zuo, X. Land Remote Sensing Applications Using Spaceborne GNSS Reflectometry: A Comprehensive Overview. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 12811–12841. [Google Scholar] [CrossRef]
- Yang, C.; Mao, K.; Guo, Z.; Shi, J.; Bateni, S.M.; Yuan, Z. Review of GNSS-R Technology for Soil Moisture Inversion. Remote Sens. 2024, 16, 1193. [Google Scholar] [CrossRef]
- Gleason, S.; Hodgart, S.; Sun, Y.; Gommenginger, C.; Mackin, S.; Adjrad, M.; Unwin, M. Detection and processing of bistatically reflected GPS signals from low earth orbit for the purpose of ocean remote sensing. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1229–1241. [Google Scholar]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-reflectometry on TechDemoSat-1: Early mission operations and exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.; Chang, P.; Clarizia, M.; Gleason, S.; Jelenak, Z.; Murray, J.; Morris, M.; Musko, S.; Posselt, D.; Provost, D. CYGNSS handbook Cyclone Global Navigation Satellite System: Deriving Surface Wind Speeds in Tropical Cyclones; National Aeronautics and Space Administration: Ann Arbor, MI, USA, 2016; 154p. [Google Scholar]
- Camps, A.; Golkar, A.; Gutierrez, A.; De Azua, J.R.; Munoz-Martin, J.F.; Fernandez, L.; Diez, C.; Aguilella, A.; Briatore, S.; Akhtyamov, R. FSSCAT, the 2017 Copernicus Masters’ “ESA Sentinel Small Satellite Challenge” Winner: A Federated Polar and Soil Moisture Tandem Mission Based on 6U Cubesats. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8285–8287. [Google Scholar]
- Jing, C.; Li, W.; Wan, W.; Lu, F.; Niu, X.; Chen, X.; Rius, A.; Cardellach, E.; Ribó, S.; Liu, B.; et al. A review of the BuFeng-1 GNSS-R mission: Calibration and validation results of sea surface and land surface. Geo-Spat. Inf. Sci. 2024, 27, 638–652. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, X.; Du, Q.; Bai, W.; Xia, J.; Cai, Y.; Wang, D.; Wu, C.; Meng, X.; Tian, Y. The status and progress of Fengyun-3E GNOS II mission for GNSS remote sensing. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5181–5184. [Google Scholar]
- Sun, Y.; Huang, F.; Xia, J.; Yin, C.; Bai, W.; Du, Q.; Wang, X.; Cai, Y.; Li, W.; Yang, G.; et al. GNOS-II on Fengyun-3 Satellite Series: Exploration of Multi-GNSS Reflection Signals for Operational Applications. Remote Sens. 2023, 15, 5756. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Ribó, S.; Oliveras, S.; Rius, A. Exploration of Multi-Mission Spaceborne GNSS-R Raw IF Data Sets: Processing, Data Products and Potential Applications. Remote Sens. 2022, 14, 1344. [Google Scholar] [CrossRef]
- Nguyen, V.A.; Nogués-Correig, O.; Yuasa, T.; Masters, D.; Irisov, V. Initial GNSS Phase Altimetry Measurements From the Spire Satellite Constellation. Geophys. Res. Lett. 2020, 47, e2020GL088308. [Google Scholar]
- Roesler, C.J.; Morton, Y.J.; Wang, Y.; Nerem, R.S. Coherent GNSS-Reflections Characterization Over Ocean and Sea Ice Based on Spire Global CubeSat Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–18. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J. Spaceborne GNSS-R for High Latitude Ionospheric TEC Disturbance Observations. In Proceedings of the 2021 IEEE Specialist Meeting on Reflectometry Using GNSS and Other Signals of Opportunity (GNSS+R), Beijing, China, 14–17 September 2021; pp. 21–24. [Google Scholar]
- Zhang, J.; Morton, Y.J.; Wang, Y.; Roesler, C.J. Mapping Surface Water Extents Using High-Rate Coherent Spaceborne GNSS-R Measurements. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Roberts, M.; Colwell, I.; Chew, C.; Masters, D.; Nordstrom, K. The Muon Space GNSS-R Surface Soil Moisture Product. arXiv 2024, arXiv:2412.00072. [Google Scholar]
- Masters, D.S.; Roberts, M.; Chew, C.; Lowe, S.; Tan, L.; Colwell, I.; McCleese, D.; Ruf, C.S. The Muon Space Signals of Opportunity Small Satellite Constellation and its Role in Sustainable Earth Observations. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 11–15 December 2023; p. SY51D-0609. [Google Scholar]
- Carreno-Luengo, H.; Ruf, C.S.; Gleason, S.; Russel, A. Latest Progress on Rongowai Polarimetric GNSS-R Airborne Mission. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 6828–6830. [Google Scholar]
- Bai, D.; Ruf, C.S.; Moller, D. Measurement of Surface Reflectivity with the Polarimetric GNSS-R Sensor in the Rongowai Mission. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 11–15 December 2023; p. A12B-02. [Google Scholar]
- Visual China Group Co., Ltd. Standing Under the Stars. Available online: https://www.vcg.com/creative/1191056346.html (accessed on 16 March 2025).
- Krebs, G.D. UK-DMC 1 (BNSCSat 1). Available online: https://space.skyrocket.de/doc_sdat/uk-dmc-1.htm (accessed on 29 September 2024).
- Page, G.s.S. TechDemoSat 1 (TDS 1). Available online: https://space.skyrocket.de/doc_sdat/techdemosat-1.htm (accessed on 14 March 2025).
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef]
- Soil Moisture Active Passive. Available online: https://smap.jpl.nasa.gov/ (accessed on 15 March 2025).
- Krebs, G.D. PRETTY. Available online: https://space.skyrocket.de/doc_sdat/pretty.htm (accessed on 29 September 2024).
- Tianmu-1. Available online: https://www.tmsats.com/satellite (accessed on 29 September 2024).
- Center, N.S.M. Fengyun-3 Series. Available online: https://www.nsmc.org.cn/nsmc/cn/satellite/FY3.html (accessed on 15 March 2025).
- Lab, N. 3cat-2. Available online: https://nanosatlab.upc.edu/en/missions-and-projects/3cat-2/ (accessed on 29 September 2024).
- Sky-Brokers. Spire Global. Available online: https://sky-brokers.com/supplier/spire-global/?cn-reloaded=1 (accessed on 15 March 2025).
- Krebs, G.D. Bufeng 1A, 1B. Available online: https://space.skyrocket.de/doc_sdat/bufeng-1.htm (accessed on 29 September 2024).
- Agency, T.S. TRITON. Available online: https://www.tasa.org.tw/zh-TW/missions/detail/TRITON (accessed on 14 March 2025).
- Krebs, G.D. FSSCAT A, B (3Cat 5A, 5B). Available online: https://space.skyrocket.de/doc_sdat/fsscat.htm (accessed on 29 September 2024).
- Lab, N. 3cat-4. Available online: https://nanosatlab.upc.edu/en/missions-and-projects/3cat-4 (accessed on 29 September 2024).
- Esa. Second Scout Gets the Go-Ahead. Available online: https://www.esa.int/Applications/Observing_the_Earth/Second_Scout_gets_the_go-ahead (accessed on 14 March 2025).
- Page, G.s.S. MuSat 1. Available online: https://space.skyrocket.de/doc_sdat/musat-1_muon.htm (accessed on 14 March 2025).
- Page, G.s.S. MuSat-2. Available online: https://space.skyrocket.de/doc_sdat/musat-2_muon.htm (accessed on 14 March 2025).
- Clarizia, M.P.; Gommenginger, C.; Gleason, S.; Galdi, C.; Unwin, M. Global navigation satellite system-reflectometry (GNSS-R) from the UK-DMC satellite for remote sensing of the ocean surface. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008; pp. I-276–I-279. [Google Scholar]
- Carreno-Luengo, H.; Lowe, S.; Zuffada, C.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP Mission: First Assessment of Polarimetric Scatterometry over Land and Cryosphere. Remote Sens. 2017, 9, 362. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Camps, A.; Via, P.; Munoz, J.F.; Cortiella, A.; Vidal, D.; Jané, J.; Catarino, N.; Hagenfeldt, M.; Palomo, P.; et al. 3Cat-2—An Experimental Nanosatellite for GNSS-R Earth Observation: Mission Concept and Analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4540–4551. [Google Scholar] [CrossRef]
- Masters, D. Design and planning for the first spire GNSS-R missions of 2019. In Proceedings of the IEEE GRSS, Specialist Meeting Reflectometry Using GNSS Other Signals Opportunity, Benevento, Italy, 20–22 May 2019. [Google Scholar]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea surface wind speed retrieval from the first Chinese GNSS-R mission: Technique and preliminary results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef]
- Center, N.S.M. Available online: https://fy4.nsmc.org.cn/nsmc/cn/satellite/FY3.html (accessed on 29 September 2024).
- Juang, J.-C.; Ma, S.-H.; Lin, C.-T. Study of GNSS-R techniques for FORMOSAT mission. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4582–4592. [Google Scholar]
- Dielacher, A.; Fragner, H.; Koudelka, O.; Beck, P.; Wickert, J.; Cardellach, E.; Høeg, P. The ESA passive reflectometry and dosimetry (PRETTY) mission. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5173–5176. [Google Scholar]
- Munoz-Martin, J.F.; Miguelez, N.; Castella, R.; Fernandez, L.; Solanellas, A.; Via, P.; Camps, A. 3Cat-4: Combined GNSS-R, L-Band radiometer with RFI mitigation, and AIS receiver for a I-Unit Cubesat based on software defined radio. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 1063–1066. [Google Scholar]
- Clarizia, M.P.; Gommenginger, C.P.; Gleason, S.T.; Srokosz, M.A.; Galdi, C.; Di Bisceglie, M. Analysis of GNSS-R delay-Doppler maps from the UK-DMC satellite over the ocean. Geophys. Res. Lett. 2009, 36, 605–610. [Google Scholar] [CrossRef]
- Lwin, A.; Yang, D.; Hong, X.; Cheraghi Shamsabadi, S.; Ahmed, W.A. Spaceborne gnss-r retrieving on global soil moisture approached by support vector machine learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B3-2020, 605–610. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribó, S.; Rius, A. Applications of Spaceborne GNSS-R over Inland Waters and Wetlands. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5255–5258. [Google Scholar]
- Xu, L.; Wan, W.; Chen, X.; Zhu, S.; Liu, B.; Hong, Y. Spaceborne GNSS-R observation of global lake level: First results from the TechDemoSat-1 mission. Remote Sens. 2019, 11, 1438. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Santi, E.; Pettinato, S.; Paloscia, S.; Clarizia, M.P.; Dente, L.; Guerriero, L.; Comite, D.; Pierdicca, N. Soil Moisture and Forest Biomass retrieval on a global scale by using CyGNSS data and Artificial Neural Networks. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 5905–5908. [Google Scholar]
- Ma, Z.; Zhang, S.; Camps, A.; Park, H.; Liu, Q.; Tan, P.; Wang, C. A fast and efficient method to estimate inland water levels using CYGNSS L1 data and DTMs: Application to Floods, lakes and reservoirs monitoring. J. Hydrol. 2024, 645, 132258. [Google Scholar]
- Warnock, A.; Ruf, C.S.; Knoll, A.L. Characterization of River Width Measurement Capability by Space Borne GNSS-Reflectometry. Remote Sens. 2024, 16, 1446. [Google Scholar] [CrossRef]
- Fayne, J.V. Inland Water Inundation Extent and Wind Speeds from Passive L-band GNSS-R and Active C- and Ka-band Radar. In Proceedings of the 2023 International Conference on Electromagnetics in Advanced Applications (ICEAA), Venice, Italy, 9–13 October 2023; p. 574. [Google Scholar]
- Zhen, Y.; Yan, Q. Improving Spaceborne GNSS-R Algal Bloom Detection with Meteorological Data. Remote Sens. 2023, 15, 3122. [Google Scholar] [CrossRef]
- Kim, H.; Lakshmi, V. Use of cyclone global navigation satellite system (CyGNSS) observations for estimation of soil moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar]
- Chew, C.; Reager, J.T.; Small, E. CYGNSS data map flood inundation during the 2017 Atlantic hurricane season. Sci. Rep. 2018, 8, 9336. [Google Scholar]
- Carreno-Luengo, H.; Camps, A.; Perez-Ramos, I.; Forte, G.; Onrubia, R.; Díez, R. 3Cat-2: A P(Y) and C/A GNSS-R experimental nano-satellite mission. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 843–846. [Google Scholar]
- Rodriguez-Alvarez, N.; Misra, S.; Morris, M. Sensitivity Analysis of Smap-Reflectometry (SMAP-R) Signals to Vegetation Water Content. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 7395–7398. [Google Scholar]
- Rodriguez-Alvarez, N.; Podest, E. Characterization of the land surface freeze/thaw state with SMAP-reflectometry (SMAP-R). In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 4024–4027. [Google Scholar]
- Masters, D.; Irisov, V.; Nguyen, V.; Duly, T.; Nogués-Correig, O.; Tan, L.; Yuasa, T.; Ringer, J.; Sikarin, R.; Gorbunov, M. Status and plans for Spire’s growing commercial constellation of GNSS science cubeSats. In Proceedings of the Joint 6th ROM SAF User Workshop and 7th IROWG Workshop, Helsingør, Denmark, 19–25 September 2019; pp. 19–25. [Google Scholar]
- Freeman, V.; Masters, D.; Jales, P.; Esterhuizen, S.; Ebrahimi, E.; Irisov, V.; Ben Khadhra, K. Earth Surface Monitoring with Spire’s New GNSS Reflectometry (GNSS-R) CubeSats. In Proceedings of the EGU General Assembly Conference Abstracts, Online, 4–8 May 2020; p. 13766. [Google Scholar]
- Yanez, C.; Li, W.; Cardellach, E.; Raynal, M.; Picot, N.; Martin-Neira, M.; Borde, F. Lake Water Level Estimation From Grazing GNSS-Reflectometry and Satellite Radar Altimetry Over the Great Lakes. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J. Observation of the Mississippi River Surface Gradients from Spire’s GNSS-R CubeSats. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 4403–4406. [Google Scholar]
- Al-Khaldi, M.M.; Johnson, J.T.; Horton, D.; McKague, D.S.; Twigg, D.; Russel, A.; Policelli, F.S.; Ouellette, J.D.; Bindlish, R.; Park, J. An Analysis of a Commercial GNSS-R Soil Moisture Dataset. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 15480–15493. [Google Scholar] [CrossRef]
- Yang, W.; Guo, F.; Zhang, X.; Zhu, Y.; Li, Z.; Zhang, Z. First quasi-global soil moisture retrieval using Fengyun-3 GNSS-R constellation observations. Remote Sens. Environ. 2025, 321, 114653. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Capon, L.F.; Ruiz-de-Azua, J.A.; Camps, A. The Flexible Microwave Payload-2: A SDR-Based GNSS-Reflectometer and L-Band Radiometer for CubeSats. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1298–1311. [Google Scholar] [CrossRef]
- Dielacher, A.; Fragner, H.; Moritsch, M.; Høeg, P.; Wickert, J.; Cardellach, E.; Koudelka, O.; Beck, P.; Walker, R.; Martin-Neira, M. The passive reflectometer on board of PRETTY. In Proceedings of the ESA ARSIKEO Conference, Amsterdam, The Netherlands, 11–13 November 2019. [Google Scholar]
- Dielacher, A.; Fragner, H.; Koudelka, O. PRETTY—Passive GNSS-Reflectometry for CubeSats. e i Elektrotechnik Und Informationstechnik 2022, 139, 25–32. [Google Scholar] [CrossRef]
- Cardellach, E.; Li, W.; Nahavandchi, H.; Semmling, M.; Moreno Bulla, M.A.; Hoque, M.M.; Wickert, J.; Asgarimehr, M.; Zus, F.; Dielacher, A. Precise GNSS-R Altimetry with the ESA PRETTY CubeSat: Initial In-Orbit Results. In Proceedings of the 2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024. [Google Scholar]
- Wang, H.Y.; Juang, J.C. Retrieval of Ocean Surface Wind Speed Using Reflected BPSK/BOC Signals. Remote Sens. 2020, 12, 2698. [Google Scholar] [CrossRef]
- Juang, J.C.; Tsai, Y.F.; Lin, C.T. TRITON GNSS-R Mission: Preliminary Results and Perspectives. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 6725–6728. [Google Scholar]
- Chen, M.-Y.; Liou, Y.-F.; Chien, H. Applications of deep-learning on TRITON data: Results and findings. In Proceedings of the Advancement on GNSS-Based Measurements and Applications, Kaohsiung, Taiwan, 2–5 December 2024; pp. 6–8. [Google Scholar]
- Santi, E.; Clarizia, M.P.; Comite, D.; Dente, L.; Guerriero, L.; Pierdicca, N.; Floury, N. Combining Cygnss and Machine Learning for Soil Moisture and Forest Biomass Retrieval in View of the ESA Scout Hydrognss Mission. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, 17–22 July 2022; pp. 7433–7436. [Google Scholar]
- Peng, J.; Li, W.; Cardellach, E.; Marigold, G.; Clarizia, M.-P. Signal coherence and water detection algorithms for the ESA HydroGNSS mission. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Han, X.; Li, X.; Yang, J.; Tao, W.; Han, G.; Wang, J.; Wang, Y.; Bao, Q.; Chen, L.; Li, W. Evaluation and deep learning-based calibration of nearshore sea surface wind speeds from FY-3E GNOS-II and TIANMU missions. Geo-Spat. Inf. Sci. 2025, 1–12. [Google Scholar] [CrossRef]
- Liu, X.; Bu, J.; Zuo, X.; Wang, Z.; Wang, Q.; Wang, Q.; Ji, C.; Zhao, Y.; Yang, H.; He, X. Performance Validation of Sea Surface Wind Speed Retrieval Algorithms and Products From the Chinese Tianmu-1 Constellation GNSS-R: First Results on Comparison With Other Wind Speed Products. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 5189–5203. [Google Scholar] [CrossRef]
- Colwell, I.; Masters, D.; Roberts, M.; Chew, C.; Lowe, S.; Tan, L.; McCleese, D.; Ruf, C. The Muon Space Generalized GNSS-R Retrieval Pipeline and Satellite Constellation. Available online: https://assets.science.nasa.gov/content/dam/science/cds/science-enabling-technology/events/2025/accelerating-informatics/AM_10_Colwell.pdf (accessed on 14 March 2025).
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R spaceborne observations to soil moisture and vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar]
- Yueh, S.H.; Shah, R.; Chaubell, M.J.; Hayashi, A.; Xu, X.; Colliander, A. A Semiempirical Modeling of Soil Moisture, Vegetation, and Surface Roughness Impact on CYGNSS Reflectometry Data. IEEE Trans. Geosci. Remote Sens. 2020, 60, 1–17. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Voronovich, A.G. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar]
- Yebra, M.; Scortechini, G.; Badi, A.; Beget, M.E.; Boer, M.M.; Bradstock, R.; Chuvieco, E.; Danson, F.M.; Dennison, P.; Resco de Dios, V. Globe-LFMC, a global plant water status database for vegetation ecophysiology and wildfire applications. Sci. Data 2019, 6, 1–8. [Google Scholar]
- Zhang, J.; Xu, Y.; Yao, F.; Wang, P.; Guo, W.; Li, L.; Yang, L. Advances in estimation methods of vegetation water content based on optical remote sensing techniques. Sci. China Technol. Sci. 2010, 53, 1159–1167. [Google Scholar]
- Judge, J.; Liu, P.-W.; Monsiváis-Huertero, A.; Bongiovanni, T.; Chakrabarti, S.; Steele-Dunne, S.C.; Preston, D.; Allen, S.; Bermejo, J.P.; Rush, P. Impact of vegetation water content information on soil moisture retrievals in agricultural regions: An analysis based on the SMAPVEX16-MicroWEX dataset. Remote Sens. Environ. 2021, 265, 112623. [Google Scholar]
- Small, E.E.; Larson, K.M.; Braun, J.J. Sensing vegetation growth with reflected GPS signals. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Ramos-Perez, I.; Valencia, E.; Park, H.; Vall-Llossera, M. Vegetation water content estimation using GNSS measurements. IEEE Geosci. Remote Sens. Lett. 2011, 9, 282–286. [Google Scholar] [CrossRef]
- Chew, C.C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Vegetation Sensing Using GPS-Interferometric Reflectometry: Theoretical Effects of Canopy Parameters on Signal-to-Noise Ratio Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2755–2764. [Google Scholar] [CrossRef]
- Wan, W.; Larson, K.M.; Small, E.E.; Chew, C.C.; Braun, J.J. Using geodetic GPS receivers to measure vegetation water content. GPS Solut. 2015, 19, 237–248. [Google Scholar] [CrossRef]
- Eroglu, O.; Kurum, M.; Ball, J. Response of GNSS-R on dynamic vegetated terrain conditions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1599–1611. [Google Scholar] [CrossRef]
- Guerriero, L.; Martín, F.; Mollfulleda, A.; Paloscia, S.; Pierdicca, N.; Santi, E.; Floury, N. Ground-based remote sensing of forests exploiting GNSS signals. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6844–6860. [Google Scholar] [CrossRef]
- Zhang, Y.; Bu, J.; Zuo, X.; Yu, K.; Wang, Q.; Huang, W. Vegetation Water Content Retrieval from Spaceborne GNSS-R and Multi-Source Remote Sensing Data Using Ensemble Machine Learning Methods. Remote Sens. 2024, 16, 2793. [Google Scholar] [CrossRef]
- Asgarimehr, M.; Entekhabi, D.; Camps, A. Diurnal vegetation moisture cycle in the Amazon and response to water stress. Geophys. Res. Lett. 2024, 51, e2024GL111462. [Google Scholar] [CrossRef]
- Chaubell, J.; Yueh, S.; Dunbar, R.S.; Colliander, A.; Entekhabi, D.; Chan, S.K.; Chen, F.; Xu, X.; Bindlish, R.; Neill, P.O.; et al. Regularized Dual-Channel Algorithm for the Retrieval of Soil Moisture and Vegetation Optical Depth From SMAP Measurements. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 102–114. [Google Scholar] [CrossRef]
- Hu, L.; Zhao, T.; Ju, W.; Peng, Z.; Shi, J.; Rodríguez-Fernández, N.J.; Wigneron, J.-P.; Cosh, M.H.; Yang, K.; Lu, H. A twenty-year dataset of soil moisture and vegetation optical depth from AMSR-E/2 measurements using the multi-channel collaborative algorithm. Remote Sens. Environ. 2023, 292, 113595. [Google Scholar] [CrossRef]
- Liu, X.; Wigneron, J.-P.; Wagner, W.; Frappart, F.; Fan, L.; Vreugdenhil, M.; Baghdadi, N.; Zribi, M.; Jagdhuber, T.; Tao, S. A new global C-band vegetation optical depth product from ASCAT: Description, evaluation, and inter-comparison. Remote Sens. Environ. 2023, 299, 113850. [Google Scholar]
- Xu, X.; Yueh, S.; Shah, R.; Hayashi, A. Vegetation optical depth retrieval from CYGNSS data. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 6407–6410. [Google Scholar]
- Bu, J.; Wang, Q.; Li, L.; Zhang, Y.; Liu, X. Combining Spaceborne GNSS-R Data and Ensemble Machine Learning Methods for the Retrieval Vegetation Optical Depth. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 10616–10619. [Google Scholar]
- Yao, Y.; Humphrey, V.; Konings, A.G.; Wang, Y.; Yin, Y.; Holtzman, N.; Wood, J.D.; Bar-On, Y.; Frankenberg, C. Investigating diurnal and seasonal cycles of Vegetation Optical Depth retrieved from GNSS signals in a broadleaf forest. Geophys. Res. Lett. 2024, 51, e2023GL107121. [Google Scholar]
- Chave, J.; Andalo, C.; Brown, S.; Cairns, M.A.; Chambers, J.Q.; Eamus, D.; Fölster, H.; Fromard, F.; Higuchi, N.; Kira, T. Tree allometry and improved estimation of carbon stocks and balance in tropical forests. Oecologia 2005, 145, 87–99. [Google Scholar] [PubMed]
- Clark, D.B.; Kellner, J.R. Tropical forest biomass estimation and the fallacy of misplaced concreteness. J. Veg. Sci. 2012, 23, 1191–1196. [Google Scholar]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar]
- Chaparro, D.; Duveiller, G.; Piles, M.; Cescatti, A.; Vall-Llossera, M.; Camps, A.; Entekhabi, D. Sensitivity of L-band vegetation optical depth to carbon stocks in tropical forests: A comparison to higher frequencies and optical indices. Remote Sens. Environ. 2019, 232, 111303. [Google Scholar]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Above-Ground Biomass Retrieval over Tropical Forests: A Novel GNSS-R Approach with CyGNSS. Remote Sens. 2020, 12, 29. [Google Scholar] [CrossRef]
- Pilikos, G.; Clarizia, M.P.; Floury, N. Biomass Estimation with GNSS Reflectometry Using a Deep Learning Retrieval Model. Remote Sens. 2024, 16, 1125. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, RG2002. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, extracting, and monitoring surface water from space using optical sensors: A review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [PubMed]
- Al-Khaldi, M.M.; Johnson, J.T.; Gleason, S.; Loria, E.; O’Brien, A.J.; Yi, Y. An algorithm for detecting coherence in cyclone global navigation satellite system mission level-1 delay-Doppler maps. IEEE Trans. Geosci. Remote Sens. 2020, 59, 4454–4463. [Google Scholar]
- Wang, Y.; Liu, Y.; Roesler, C.; Morton, Y.J. Detection of Coherent GNSS-R Measurements Using a Support Vector Machine. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6210–6213. [Google Scholar]
- Wang, Y.; Breitsch, B.; Morton, Y.T.J. A State-Based Method to Simultaneously Reduce Cycle Slips and Noise in Coherent GNSS-R Phase Measurements From Open-Loop Tracking. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8873–8884. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J. Coherent GNSS Reflection Signal Processing for High-Precision and High-Resolution Spaceborne Applications. IEEE Trans. Geosci. Remote Sens. 2021, 59, 831–842. [Google Scholar] [CrossRef]
- Mei, J.; Yan, S.; Chen, C. Multifeature Water Discrimination Method Based on CYGNSS Intermediate Frequency Data. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–14. [Google Scholar] [CrossRef]
- Zhang, J.; Morton, Y.; Wang, Y.; Roesler, C. Mapping Inland Water Bodies by Using High-rate Space-borne GNSS-R Observations. In Proceedings of the AGU Fall Meeting Abstracts, Chicago, IL, USA, 12–16 December 2022; p. H33E-02. [Google Scholar]
- Carreno-Luengo, H.; Ruf, C.S.; Gleason, S.; Russel, A. A New Multiresolution CYGNSS Data Product for Fully and Partially Coherent Scattering. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–18. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Ruf, C.S.; Gleason, S.; Russel, A.; Russo, I.M.; Bisceglie, M.D.; Galdi, C. In-Orbit Real Time Inland Water Detection by A Future Spaceborne Gnss-R Receiver. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16–21 July 2023; pp. 3724–3725. [Google Scholar]
- Loria, E.; Russo, I.M.; Wang, Y.; Giangregorio, G.; Galdi, C.; Bisceglie, M.d.; Wilson-Downs, B.; Lavalle, M.; O’Brien, A.J.; Morton, Y.J.; et al. Comparison of GNSS-R Coherent Reflection Detection Algorithms Using Simulated and Measured CYGNSS Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Ruf, C.S.; Gleason, S.; Russel, A. Detection of inland water bodies under dense biomass by CYGNSS. Remote Sens. Environ. 2024, 301, 113896. [Google Scholar] [CrossRef]
- Du, H.; Nan, Y.; Li, W.; Cardellach, E.; Ribó, S.; Rius, A. Coherent Combination of GPS III L1 C/A and L1C Signals for GNSS Reflectometry. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5801019. [Google Scholar] [CrossRef]
- Kossieris, S.; Asgarimehr, M.; Wickert, J. Unsupervised Machine Learning for GNSS Reflectometry Inland Water Body Detection. Remote Sens. 2023, 15, 3206. [Google Scholar] [CrossRef]
- Bai, D.; Ruf, C.S.; Moller, D. Calibration of the Polarimetric GNSS-R Sensor in the Rongowai Mission. arXiv 2025, arXiv:2501.10334. [Google Scholar]
- Peng, J.; Cardellach, E.; Li, W.; Ribó, S.; Rius, A. Impact of Right-Hand Polarized Signals in GNSS-R Water Detection Algorithms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 5646–5655. [Google Scholar] [CrossRef]
- Chen, Y.; Yan, Q. Unlocking the potential of CYGNSS for pan-tropical inland water mapping through multi-source data and transformer. Int. J. Appl. Earth Obs. Geoinf. 2024, 133, 104122. [Google Scholar] [CrossRef]
- Pu, T.; Gerlein-Safdi, C.; Xiong, Y.; Li, M.; Kort, E.A.; Bloom, A.A. Berkeley-RWAWC: A new CYGNSS-based watermask unveils unique observations of seasonal dynamics in the tropics. Water Resour. Res. 2024, 60, e2024WR037060. [Google Scholar]
- Gao, F.; Xu, T.; Meng, X.; Wang, N.; He, Y.; Ning, B. A Coastal Experiment for GNSS-R Code-Level Altimetry Using BDS-3 New Civil Signals. Remote Sens. 2021, 13, 1378. [Google Scholar] [CrossRef]
- Xu, T.; He, Y.; Gao, F.; Meng, X. High-precision GNSS-R Altimetry based on Carrier Phase Measurement Combination. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2023; p. EGU-4062. [Google Scholar]
- Cardellach, E.; Li, W.; Rius, A.; Semmling, M.; Wickert, J.; Zus, F.; Ruf, C.S.; Buontempo, C. First Precise Spaceborne Sea Surface Altimetry with GNSS Reflected Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 102–112. [Google Scholar] [CrossRef]
- Semmling, A.M.; Schmidt, T.; Wickert, J.; Schön, S.; Fabra, F.; Cardellach, E.; Rius, A. On the retrieval of the specular reflection in GNSS carrier observations for ocean altimetry. Radio Sci. 2012, 47, 1–13. [Google Scholar] [CrossRef]
- Loria, E.; O’Brien, A.; Zavorotny, V.; Downs, B.; Zuffada, C. Analysis of scattering characteristics from inland bodies of water observed by CYGNSS. Remote Sens. Environ. 2020, 245, 111825. [Google Scholar] [CrossRef]
- Brendle, N.J.; Chan, S.K.; Hajj, G.; Al-Khaldi, M.M.; Johnson, J.T. Reservoir Water Level Monitoring Using CYGNSS’s Level-1 Observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 9090–9098. [Google Scholar] [CrossRef]
- Wang, Y.; Minear, J.T.; Putnam, A. Precise Mapping of Relative Surface Elevation Using Spaceborne Gnss-R Phase Altimetry with Crossover Adjustment: A Case Study of Lake Ladoga. SSRN 2025. [Google Scholar] [CrossRef]
- Yamazaki, D.; O’Loughlin, F.; Trigg, M.A.; Miller, Z.F.; Pavelsky, T.M.; Bates, P.D. Development of the global width database for large rivers. Water Resour. Res. 2014, 50, 3467–3480. [Google Scholar] [CrossRef]
- Allen, G.H.; Pavelsky, T.M. Patterns of river width and surface area revealed by the satellite-derived North American River Width data set. Geophys. Res. Lett. 2015, 42, 395–402. [Google Scholar] [CrossRef]
- Warnock, A.; Ruf, C. Response to variations in river flowrate by a spaceborne GNSS-R river width estimator. Remote Sens. 2019, 11, 2450. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J. River slope observation from spaceborne GNSS-R carrier phase measurements: A case study. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, Y.; Morton, Y.J.; Minear, J.T.; Putnam, A.; Conrad, A.; Axelrad, P.; Nerem, R.S.; Warnock, A.; Ruf, C.; Moreira, D.M. Measuring river slope using spaceborne GNSS reflectometry: Methodology and first performance assessment. Remote Sens. Environ. 2025, 318, 114597. [Google Scholar] [CrossRef]
- Fayne, J.V.; Al-Khaldi, M. Passive L-Band GNSS-R and Active C-and Ka-Band Radar Inland Water Wind Speeds. In Proceedings of the 2024 United States National Committee of URSI National Radio Science Meeting (USNC-URSI NRSM), Boulder, CO, USA, 9–12 January 2024; p. 178. [Google Scholar]
- Loria, E.; O’Brien, A.; Zavorotny, V.; Zuffada, C. Towards wind vector and wave height retrievals over inland waters using CYGNSS. Earth Space Sci. 2021, 8, e2020EA001506. [Google Scholar] [CrossRef]
- Zavorotny, V.; Loria, E. Scattering Models for Gnss-R in Inland Waters. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 958–961. [Google Scholar]
- Landuyt, L.; Van Wesemael, A.; Schumann, G.J.-P.; Hostache, R.; Verhoest, N.E.; Van Coillie, F.M. Flood mapping based on synthetic aperture radar: An assessment of established approaches. IEEE Trans. Geosci. Remote Sens. 2018, 57, 722–739. [Google Scholar] [CrossRef]
- Jia, Y.; Xiao, Z.; Yang, L.; Liu, Q.; Jin, S.; Lv, Y.; Yan, Q. Enhancing Algal Bloom Level Monitoring with CYGNSS and Sentinel-3 Data. Remote Sens. 2024, 16, 3915. [Google Scholar] [CrossRef]
- Zhen, Y.; Yan, Q. Recovering NDVI over lake surfaces: Initial insights from CYGNSS data enhanced by ERA-5 inputs. Int. J. Appl. Earth Obs. Geoinf. 2024, 135, 104253. [Google Scholar] [CrossRef]
- Stocker, T. Climate Change 2013: The Physical Science Basis: Working Group I Contribution to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Chew, C.C.; Shah, R.; Zuffada, C.; Mannucci, A.J. Wetland mapping and measurement of flood inundated area using ground-reflected GNSS signals in a bistatic radar system. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7184–7187. [Google Scholar]
- Nghiem, S.V.; Zuffada, C.; Shah, R.; Chew, C.; Lowe, S.T.; Mannucci, A.J.; Cardellach, E.; Brakenridge, G.R.; Geller, G.; Rosenqvist, A. Wetland monitoring with global navigation satellite system reflectometry. Earth Space Sci. 2017, 4, 16–39. [Google Scholar] [CrossRef]
- Jensen, K.; McDonald, K.; Podest, E.; Rodriguez-Alvarez, N.; Horna, V.; Steiner, N. Assessing L-Band GNSS-Reflectometry and Imaging Radar for Detecting Sub-Canopy Inundation Dynamics in a Tropical Wetlands Complex. Remote Sens. 2018, 10, 1431. [Google Scholar] [CrossRef]
- Morris, M.; Chew, C.; Reager, J.T.; Shah, R.; Zuffada, C. A novel approach to monitoring wetland dynamics using CYGNSS: Everglades case study. Remote Sens. Environ. 2019, 233, 111417. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Podest, E.; Jensen, K.; McDonald, K.C. Classifying Inundation in a Tropical Wetlands Complex with GNSS-R. Remote Sens. 2019, 11, 1053. [Google Scholar] [CrossRef]
- Lowe, S.T.; Chew, C.; Shah, J.; Kilzer, M. An Aircraft Wetland Inundation Experiment Using GNSS Reflectometry. Remote Sens. 2020, 12, 512. [Google Scholar] [CrossRef]
- O’Brien, A.; Loria, E. Overcoming the Current Limitations of GNSS-R Observation of Wetlands and Surface Water. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 962–965. [Google Scholar]
- Downs, B.; O’Brien, A.; Morris, M.; Zavorotny, V.; Zuffada, C. Using GNSS Reflectometry Measurements Over the Everglades to Identify Variations in Wetland Inundation Extent Beneath Vegetation. Authorea Prepr. 2022. [Google Scholar] [CrossRef]
- Setti, P.D.T.; Tabibi, S.; Van Dam, T. CYGNSS GNSS-R Data for Inundation Monitoring in the Brazilian Pantanal Wetland. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17-22 July 2022; pp. 5531–5534. [Google Scholar]
- Zuffada, C.; Downs, B.; Lavalle, M.; Loria, E.; Morris, M.; O’Brien, A.; Russo, I.; Zavorotny, V. An Assessment of the Capabilities of GNSS Reflectometry for Dynamic Monitoring of Wetlands and Inundations. Authorea Prepr. 2022. [Google Scholar] [CrossRef]
- Beckheinrich, J.; Beyerle, G.; Schoen, S.; Apel, H.; Semmling, M.; Wickert, J. WISDOM: GNSS-R based flood monitoring. In Proceedings of the 2012 Workshop on Reflectometry Using GNSS and Other Signals of Opportunity (GNSS+ R), West Lafayette, IN, USA, 10–11 October 2012; pp. 1–6. [Google Scholar]
- Wan, W.; Liu, B.; Zeng, Z.; Chen, X.; Wu, G.; Xu, L.; Chen, X.; Hong, Y. Using CYGNSS data to monitor China’s flood inundation during typhoon and extreme precipitation events in 2017. Remote Sens. 2019, 11, 854. [Google Scholar] [CrossRef]
- Ghasemigoudarzi, P.; Huang, W.; De Silva, O.; Yan, Q.; Power, D.T. Flash flood detection from CYGNSS data using the RUSBoost algorithm. IEEE Access 2020, 8, 171864–171881. [Google Scholar]
- Rajabi, M.; Nahavandchi, H.; Hoseini, M. Evaluation of CYGNSS observations for flood detection and mapping during Sistan and Baluchestan torrential rain in 2020. Water 2020, 12, 2047. [Google Scholar] [CrossRef]
- Unnithan, S.K.; Biswal, B.; Rüdiger, C. Flood inundation mapping by combining GNSS-R signals with topographical information. Remote Sens. 2020, 12, 3026. [Google Scholar] [CrossRef]
- Yang, W.; Gao, F.; Xu, T.; Wang, N.; Tu, J.; Jing, L.; Kong, Y. Daily Flood Monitoring Based on Spaceborne GNSS-R Data: A Case Study on Henan, China. Remote Sens. 2021, 13, 4561. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, Z.; Li, Z.; Zhang, P.; Liu, Q.; Nan, Y.; Zhang, J.; Hu, S.; Feng, Y.; Zhao, H. Using CYGNSS data to map flood inundation during the 2021 extreme precipitation in Henan Province, China. Remote Sens. 2021, 13, 5181. [Google Scholar] [CrossRef]
- Liu, B.; Wan, W.; Tang, G.; Li, H.; Guo, Z.; Chen, X.; Hong, Y. Statistical Analysis of CyGNSS Speckle and Its Applications to Surface Water Mapping. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Wilson-Downs, B.; O’Brien, A.; Zuffada, C. Retrieval of Dynamic Changes of Surface Water Extent from Sparse GNSS-R Measurements Using a Model-Driven Approach. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 4407–4410. [Google Scholar]
- Zeiger, P.; Frappart, F.; Darrozes, J. Introducing the Global Mapping of Flood Dynamics Using Gnss-Reflectometry and the Cygnss Mission. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 53, 93–100. [Google Scholar]
- Song, D.; Zhang, Q.; Wang, B.; Yin, C.; Xia, J. A novel dual-branch neural network model for flood monitoring in South Asia based on CYGNSS data. Remote Sens. 2022, 14, 5129. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, Y.; Jin, S.; Liu, S.; Jia, Y.; Zhen, Y.; Chen, T.; Huang, W. Inland Water Mapping Based on GA-LinkNet From CyGNSS Data. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.; Huelsing, H. Flooding and inundation maps using interpolated CYGNSS reflectivity observations. Remote Sens. Environ. 2023, 293, 113598. [Google Scholar]
- Downs, B. Mapping Inland Surface Water with Spaceborne GNSS Reflectometry and SAR. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2023. [Google Scholar]
- Downs, B.; Kettner, A.J.; Chapman, B.D.; Brakenridge, G.R.; O’Brien, A.J.; Zuffada, C. Assessing the relative performance of GNSS-R flood extent observations: Case study in South Sudan. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–13. [Google Scholar]
- Scott, M.; Chew, C.; Wang, Y.; Roesler, C.; Morton, Y.J. On The Relationship Between The GNSS-R Signal SNR and Coherency With Surface Water: A Case Study Over Lake Okeechobee. In Proceedings of the IGARSS 2023—2023 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, CA, USA, 16-21 July 2023; pp. 3345–3348. [Google Scholar]
- Yang, T.; Sun, Z.; Jiang, L. A Novel Index for Daily Flood Inundation Retrieval from CYGNSS Measurements. Remote Sens. 2023, 15, 524. [Google Scholar] [CrossRef]
- Zeiger, P.; Frappart, F.; Darrozes, J.; Prigent, C.; Jiménez, C.; Bourrel, L. Weekly mapping of surface water extent in the intertropical wetlands using spaceborne GNSS reflectometry. J. Hydrol. 2023, 626, 130305. [Google Scholar] [CrossRef]
- Zhang, S.; Ma, Z.; Liu, Q.; Hu, S.; Feng, Y.; Zhao, H.; Guo, Q. POBI interpolation algorithm for CYGNSS near real time flood detection research: A case study of extreme precipitation events in Henan, China in 2021. Adv. Space Res. 2023, 71, 2862–2878. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, S.; Liu, Q.; Feng, Y.; Guo, Q.; Zhao, H.; Feng, Y. Using CYGNSS and L-band Radiometer Observations to Retrieve Surface Water Fraction: A Case Study of the Catastrophic Flood of 2022 in Pakistan. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4203117. [Google Scholar] [CrossRef]
- Setti, P.T.; Tabibi, S. Spaceborne GNSS-Reflectometry for surface water mapping in the Amazon basin. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 6658–6670. [Google Scholar] [CrossRef]
- Yan, Q.; Liu, S.; Chen, T.; Jin, S.; Xie, T.; Huang, W. Mapping Surface Water Fraction Over the Pan-Tropical Region Using CYGNSS Data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5800914. [Google Scholar] [CrossRef]
- Andreadis, K.; Moller, D. Low-latency flood inundation mapping with airborne GNSS-R. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 14–19 April 2024; p. 20575. [Google Scholar]
- Rover, S.; Vitti, A. GNSS-R with low-cost receivers for retrieval of antenna height from snow surfaces using single-frequency observations. Sensors 2019, 19, 5536. [Google Scholar] [CrossRef]
- Paloscia, S.; Santi, E.; Fontanelli, G.; Pettinato, S.; Egido, A.; Caparrini, M.; Motte, E.; Guerriero, L.; Pierdicca, N.; Floury, N. GNSS-R sensor sensitivity to soil moisture and vegetation biomass and comparison with SAR data performance. In Proceedings of the SAR Image Analysis, Modeling, and Techniques XIII, Dresden, Germany, 23–26 September 2013; pp. 125–131. [Google Scholar]
- Song, S.; Zhu, Y.; Qu, X.; Tao, T. Spaceborne GNSS-R for Sensing Soil Moisture Using CYGNSS Considering Land Cover Type. Water Resour. Manag. 2025. [Google Scholar] [CrossRef]
- Cai, H. Research on Flood Disaster Risk Assessment Based on Random Forest Algorithm. In Proceedings of the 2022 IEEE 2nd International Conference on Data Science and Computer Application (ICDSCA), Dalian, China, 28–30 October 2022; pp. 356–359. [Google Scholar]
- Lu, C.; Wang, Z.; Wu, Z.; Zheng, Y.; Liu, Y. Global Ocean Wind Speed Retrieval From GNSS Reflectometry Using CNN-LSTM Network. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–12. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, X.; Liu, W.; Hu, Q.; Wickert, J.; Jiang, Z. An SVM-Based Snow Detection Algorithm for GNSS-R Snow Depth Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6046–6052. [Google Scholar] [CrossRef]
- Yin, C.; Huang, F.; Xia, J.; Bai, W.; Sun, Y.; Yang, G.; Zhai, X.; Xu, N.; Hu, X.; Zhang, P.; et al. Soil Moisture Retrieval from Multi-GNSS Reflectometry on FY-3E GNOS-II by Land Cover Classification. Remote Sens. 2023, 15, 1097. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Q.; Liu, Q.; Ma, Z.; Liu, N.; Hu, S.; Bao, L.; Zhou, X.; Zhao, H.; Wang, L.; et al. Improvement of CYGNSS soil moisture retrieval model considering water and surface temperature. Adv. Space Res. 2023, 72, 3048–3064. [Google Scholar] [CrossRef]
- Zhu, Y.; Guo, F.; Zhang, X. Effect of surface temperature on soil moisture retrieval using CYGNSS. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102929. [Google Scholar] [CrossRef]
- Lei, F.; Senyurek, V.; Kurum, M.; Gurbuz, A.C.; Boyd, D.; Moorhead, R.; Crow, W.T.; Eroglu, O. Quasi-global machine learning-based soil moisture estimates at high spatio-temporal scales using CYGNSS and SMAP observations. Remote Sens. Environ. 2022, 276, 113041. [Google Scholar] [CrossRef]
- Li, M.; Hou, Y.; Song, X.; Hou, C.; Xiong, Z.; Ma, D. Self-Attention-Guided Multiindicator Retrieval for Ocean Surface Wind Field With Multimodal Data Augmentation and Fusion. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–22. [Google Scholar] [CrossRef]
- Zhao, D.; Heidler, K.; Asgarimehr, M.; Arnold, C.; Xiao, T.; Wickert, J.; Zhu, X.X.; Mou, L. DDM-Former: Transformer networks for GNSS reflectometry global ocean wind speed estimation. Remote Sens. Environ. 2023, 294, 113629. [Google Scholar] [CrossRef]
- Cheng, P.H.; Lin, C.C.H.; Morton, Y.T.J.; Yang, S.C.; Liu, J.Y. A Bagged-Tree Machine Learning Model for High and Low Wind Speed Ocean Wind Retrieval From CYGNSS Measurements. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–10. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Y.; Lai, J.; Lin, Y.; Shi, L. Evaluation of Satellite-Based Global Navigation Satellite System Reflectometry (GNSS-R) Soil Moisture Products in Complex Terrain: A Case Study of the Yunnan–Guizhou Plateau. Remote Sens. 2025, 17, 887. [Google Scholar] [CrossRef]
- Wu, X.; Jin, S.; Xia, J. A Forward GPS Multipath Simulator Based on the Vegetation Radiative Transfer Equation Model. Sensors 2017, 17, 1291. [Google Scholar] [CrossRef]
- Koppa, A.; Rains, D.; Hulsman, P.; Poyatos, R.; Miralles, D.G. A deep learning-based hybrid model of global terrestrial evaporation. Nat. Commun. 2022, 13, 1912. [Google Scholar] [CrossRef]
- Wu, X.; Du, X.; Yan, F.; Bai, W.; Song, S. Investigation of Potential of GNSS-R Polarization: Theoretical Simulations. Remote Sens. 2022, 14, 3700. [Google Scholar] [CrossRef]
- Chew, C.; Small, E. Soil moisture sensing using spaceborne GNSS reflections: Comparison of CYGNSS reflectivity to SMAP soil moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Yan, Q.; Jin, S.; Huang, W.; Jia, Y. Global soil moisture estimation using CYGNSS data. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6182–6185. [Google Scholar]
- Wan, W.; Liu, B.; Guo, Z.; Lu, F.; Niu, X.; Li, H.; Ji, R.; Cheng, J.; Li, W.; Chen, X. Initial evaluation of the first Chinese GNSS-R mission BuFeng-1 A/B for soil moisture estimation. IEEE Geosci. Remote Sens. Lett. 2021, 19, 8017305. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Llaveria, D.; Herbert, C.; Pablos, M.; Park, H.; Camps, A. Soil moisture estimation synergy using GNSS-R and L-Band microwave radiometry data from FSSCat/FMPL-2. Remote Sens. 2021, 13, 994. [Google Scholar] [CrossRef]
- Eroglu, O.; Kurum, M.; Boyd, D.; Gurbuz, A.C. High Spatio-Temporal Resolution CYGNSS Soil Moisture Estimates Using Artificial Neural Networks. Remote Sens. 2019, 11, 2272. [Google Scholar] [CrossRef]
- Yang, T.; Wan, W.; Sun, Z.; Liu, B.; Li, S.; Chen, X. Comprehensive Evaluation of Using TechDemoSat-1 and CYGNSS Data to Estimate Soil Moisture over Mainland China. Remote Sens. 2020, 12, 1699. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Chen, H.; Yan, Q.; Savi, P.; Jin, Y.; Yuan, Y. Temporal-spatial soil moisture estimation from CYGNSS using machine learning regression with a preclassification approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4879–4893. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Yan, Q.; Savi, P.; Zhang, R.; Li, W. An effective land type labeling approach for independently exploiting high-resolution soil moisture products based on CYGNSS data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4234–4247. [Google Scholar] [CrossRef]
- Senyurek, V.; Lei, F.; Boyd, D.; Gurbuz, A.C.; Kurum, M.; Moorhead, R. Evaluations of machine learning-based CYGNSS soil moisture estimates against SMAP observations. Remote Sens. 2020, 12, 3503. [Google Scholar] [CrossRef]
- Nabi, M.; Senyurek, V.; Gurbuz, A.C.; Kurum, M. Deep learning-based soil moisture retrieval in conus using cygnss delay–doppler maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 6867–6881. [Google Scholar] [CrossRef]
- Nabi, M.M.; Senyurek, V.; Lei, F.; Kurum, M.; Gurbuz, A.C. Quasi-Global Assessment of Deep Learning-Based CYGNSS Soil Moisture Retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 5629–5644. [Google Scholar] [CrossRef]
- Roberts, T.M.; Colwell, I.; Chew, C.; Lowe, S.; Shah, R. A Deep-Learning Approach to Soil Moisture Estimation with GNSS-R. Remote Sens. 2022, 14, 3299. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Effective Surface Roughness Impact in Polarimetric GNSS-R Soil Moisture Retrievals. Remote Sens. 2023, 15, 2013. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K. Full Polarimetric GNSS-R Assessment of the Freeze and Thaw States of the Terrestrial Cryosphere. IEEE Trans. Geosci. Remote Sens. 2024, 62, 4301711. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Analysis of polarimetric GNSS-R Stokes parameters of the Earth’s land surface. Remote Sens. Environ. 2023, 287, 113491. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K. A Hybrid Compact Polarimetry GNSS-R Analysis of the Earth’s Cryosphere. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4301615. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Detection Probability of Polarimetric GNSS-R Signals. IEEE Geosci. Remote Sens. Lett. 2023, 20, 3500905. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K.; Entekhabi, D.; Colliander, A. The first polarimetric GNSS-Reflectometer instrument in space improves the SMAP mission’s sensitivity over densely vegetated areas. Sci. Rep. 2023, 13, 3722. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K. Initial evaluation of freeze/thaw state and sea ice detection using the SMAP-R dataset. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 3876–3879. [Google Scholar]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Scattering Matrix Retrieval Using Full Polarimetric GNSS-R. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5107015. [Google Scholar]
- Perez-Portero, A.; Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K. Estimating Backward Scattering Using GNSS-Reflectometry Measurements for Soil Moisture Retrieval. IEEE Access 2024, 12, 73608–73619. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Bosch-Lluis, X.; Rodriguez-Alvarez, N.; Oudrhiri, K. Calibration Strategy for Compact Polarimetric GNSS-R Instruments. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5103513. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Munoz-Martin, J.F.; Bosch-Lluis, X.; Oudrhiri, K. Introduction to the new SMAP-reflectometry (SMAP-R) dataset: Status and science capabilities. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 7624–7627. [Google Scholar]
- Bosch-Lluis, X.; Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Oudrhiri, K. Towards GNSS-R hybrid compact polarimetry: Introducing the stokes parameters for SMAP-R dataset. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 7425–7428. [Google Scholar]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Full Calibration of the SMAP-R dataset. In Proceedings of the IGARSS 2022—2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 7437–7440. [Google Scholar]
- Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Oudrhiri, K. Stokes parameters retrieval and calibration of hybrid compact polarimetric GNSS-R signals. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5113911. [Google Scholar]
- Rodriguez-Alvarez, N.; Misra, S.; Podest, E.; Morris, M.; Bosch-Lluis, X. The use of SMAP-reflectometry in science applications: Calibration and capabilities. Remote Sens. 2019, 11, 2442. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Amèzaga, A.; Bolet, A.; Vidal, D.; Jané, J.; Munoz, J.F.; Olivé, R.; Camps, A.; Carola, J.; Catarino, N.; et al. 3CAT-2: A 6U CubeSat-based multi-constellation, dual-polarization, and dual-frequency GNSS-R and GNSS-RO experimental mission. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 5115–5118. [Google Scholar]



| Vegetation Parameters | Literature | Satellites | Spatial Coverage | GNSS-R Observables | Auxiliary Data | Reference Data | Retrieval Models | Retrieval Accuracy |
|---|---|---|---|---|---|---|---|---|
| AGB and CH | [7] | CYGNSS | Quasi-global | Traditional Reflectivity (Γsurrface) and Correction Reflectivity (ΓLR (, θi)/) | AGB map derived from LUCID and ICESat/GLAS CHt | SMAP soil moisture | ANN | The RMSE was reduced by 11.63% and R was improved by 5.26% using the AGB method, while the RMSE was reduced by 12.59% and R was improved by 5.06% using the CH method. |
| [20] | CYGNSS | Manaus, Algorta, Fairbanks, and Asuncion | Reflectivity, SNR, and DDM peak | SMAP VOD | MODIS NDVI | ANN | RMSE = 0.1 and R = 0.924 | |
| [111] | Ground-Based | Poplar forests of four different biomasses in Tuscany, Italy | GNSS signal power and polarization | Ground truth vegetation biomass, tree density, LAI, and SMC | Vegetation height | ANN | The RMSE is about 10 tons/hectare, and the R is close to 1. | |
| [124] | CYGNSS | Congo and Amazon rainforests | Reflected delay waveforms, trailing edge width (TE), reflectivity (Γ) | land Elevation Satellite (ICESat-1)/Geoscience Laser Altimeter System (GLAS) AGB | SMAP-derived VOD, PI, and SMC | linear regressions” | The sensitivities between the trailing edge AGB and the roughness parameter Γ are 350 t/ha and 250 t/ha, respectively. | |
| [125] | CYGNSS | South America, Central Africa | DDMs, equivalent surface reflectivity Γ, and SNR | ESA CCI biomass map | - | neural networks | R = 0.962 and RMSE = 25.65 t/ha. | |
| VOD | [117] | CYGNSS | Tropical forest regions, agricultural land, and the global scale | Reflectivity | SMAP soil moisture data | SMAP VOD NDVI VOD | Semi-empirical forward model | The VOD data inverted by CYGNSS are more consistent with SMAP data in agricultural areas and lower in forested areas. |
| VWC | [6] | CYGNSS | Quasi-global | The coefficient and intercept feature derived from the tau-omega model | SMAP VWC | SMAP SM, the land cover, and NDVI derived from MODIS | Linear model and ANN | CYGNSS VWC retrieval (ANN: R = 0.940 and RMSE = 1.392 kg/m2) outperforms the linear model. |
| [113] | CYGNSS | Amazon rainforest | Reflectivity | SMAP soil moisture | AmeriFlux PE-QFR site data | Linear model | GNSS-R VWC are consistent with SMAP-derived VWC |
| Source | Satellites | Spatial Coverage (Resolution) | GNSS-R Observables | Reference Data | Retrieval Models | Retrieval Accuracy |
|---|---|---|---|---|---|---|
| [5] | CYGNSS | Five lakes | Reflection signal delay and SNR | DAHITI and Hydroweb | - | The accuracy of inland water surface elevation can reach 2–3 m. |
| [70] | TDS-1 | 500 square kilometers | DDMs | CryoSat-2 data and Hydroweb data | - | Overall R2 greater than 0.95. |
| [73] | CYGNSS | three floods, three lakes, and two reservoirs | Surface reflectivity | ICESat-2, GEDI, DAHITI, and Hydroweb | A water level retrieval method based on CYGNSS and the digital terrain model (DTM) | The water level recovery method combining CYGNSS and DTM data is effective. |
| [84] | Spire | Great Lakes of North America | Raw IF data | NOAA CO-OPS network height data and mean lake surface (MLS) | - | The use of GNSS radio measurements to supplement RA observations has advantages. |
| [150] | CYGNSS | Okeechobee Lake, Bull Shoals Lake, and Mead Lake | Normalized BISTATIC radar cross section (NBRCS) and surface reflectivity | In situ water level data and planet satellite imagery from NASA SEDAC | Empirical linear models | For reasonable performance, at least 15 2 Hz measurements per day are required in the “edge area”. |
| [151] | Spire | Lake Ladoga | carrier phases, and SNR | ICESat-2 altimetry measurements, and the geoid model EGM2008 | least-squares adjustment techniques | root-mean-square (RMS) = 3 cm |
| References | Satellite | GNSS-R Observations | Spatial Coverage | Time Resolution | Auxiliary Data | Main Results |
|---|---|---|---|---|---|---|
| [78] | CYGNSS | Reflectivity | Texas and Cuba | ~3 days | SMAP | The surface reflectivity was analyzed to quantitatively describe the flood peak and ebb tide processes. |
| [175] | CYGNSS | Reflectivity | Southeastern China | Daily scale | Global Precipitation Measurement (GPM) | CYGNSS can dynamically monitor flooding and access flood-inundated areas. |
| [176] | CYGNSS | Each SP extracted 11 different observations. | Areas affected during Hurricane Harvey and Hurricane Irma | - | DFO flood maps | The selected method detected 89.00% and 85.00% submerged points and 97.20% and 71.00% non-submerged land points, respectively. |
| [177] | CYGNSS | SNR | Sistan and Baluchestan provinces | Three days (13 January to 15 January 2020) | MODIS false color images | A flood area of about 19,644 km2 kilometers was detected using changes in reflectivity during heavy rain. |
| [178] | CYGNSS | SNR | Kerala, India, Bangladesh, and parts of northern and northeastern India | daily | Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) digital elevation model (DEM) Version 3 | Combined with terrain indicators, a flood accuracy of 60–80% can be achieved at lower thresholds. |
| [179] | CYGNSS | Reflectivity | Henan, China | daily | SMAP and MODIS images | The CYGNSS high albedo area is highly consistent with the MODIS and SMAP monitoring results. |
| [181] | CYGNSS | Reflectivity | 37°S~37°N | - | MODIS and SMAP | The overall accuracy in water body mapping is about 0.97, and the F1 score is about 0.60. |
| [186] | CYGNSS | Surface reflectivity (Γ), the peak of the DDM | Amazon, Mozambique, Mali, and Australia | Three days | Global surface water dataset, a static dataset of AGB, and SMAP soil moisture | The advantages of CYGNSS in quickly updating flooded areas have been confirmed. |
| [188] | CYGNSS | Normalized SNR | South Sudan | Month scale | - | Improved mapping of inland surface water systems using GNSS-R and SAR was observed. |
| [190] | CYGNSS | Surface reflectivity | southeast China | Daily scale | VIIRS floodwater fraction data, SMAP data, and GPM IMERG | The annual threshold flood inundation index based on CYGNSS data is highly consistent with VIIRS data and GPM data (0.51 < R < 0.64). |
| [193] | CYGNSS | Surface reflectivity | Pakistan | 3 days | Tb and SM data, global precipitation measurement (GPM), global flood monitoring product, and remote sensing image | High-resolution dynamic water monitoring is achieved by combining CYGNSS reflectivity with SMAP/SMOS brightness temperature data. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, J.; Bu, J.; Li, H.; Wang, Q. Spaceborne GNSS Reflectometry for Vegetation and Inland Water Monitoring: Progress, Challenges, Opportunities, and Potential. Remote Sens. 2025, 17, 1199. https://doi.org/10.3390/rs17071199
Xie J, Bu J, Li H, Wang Q. Spaceborne GNSS Reflectometry for Vegetation and Inland Water Monitoring: Progress, Challenges, Opportunities, and Potential. Remote Sensing. 2025; 17(7):1199. https://doi.org/10.3390/rs17071199
Chicago/Turabian StyleXie, Jiaxi, Jinwei Bu, Huan Li, and Qiulan Wang. 2025. "Spaceborne GNSS Reflectometry for Vegetation and Inland Water Monitoring: Progress, Challenges, Opportunities, and Potential" Remote Sensing 17, no. 7: 1199. https://doi.org/10.3390/rs17071199
APA StyleXie, J., Bu, J., Li, H., & Wang, Q. (2025). Spaceborne GNSS Reflectometry for Vegetation and Inland Water Monitoring: Progress, Challenges, Opportunities, and Potential. Remote Sensing, 17(7), 1199. https://doi.org/10.3390/rs17071199