


Assessment of the Potential of Spaceborne GNSS-R Interferometric Altimetry for Monthly Marine Gravity Anomaly

 , , , , ,
, , , , ,
Abstract
1. Introduction
2. Experimental Data
3. Methodology
4. Results and Discussion
4.1. Assessment of Monthly Marine Gravity Field Recovered a Single GNSS-R Satellite
4.2. Assessment of Monthly Marine Gravity Field from Dual Satellite Constellation
5. Conclusions
- Spaceborne GNSS-R interferometric altimetry technology allows for high-resolution and precise inversion of monthly marine gravity anomaly, enhancing the spatial resolution of current time-variable gravity field products. In the single GNSS-R satellite Operational scenario, the accuracy of monthly marine gravity anomaly inversion on a 30′ grid can reach 4.93 mGal.
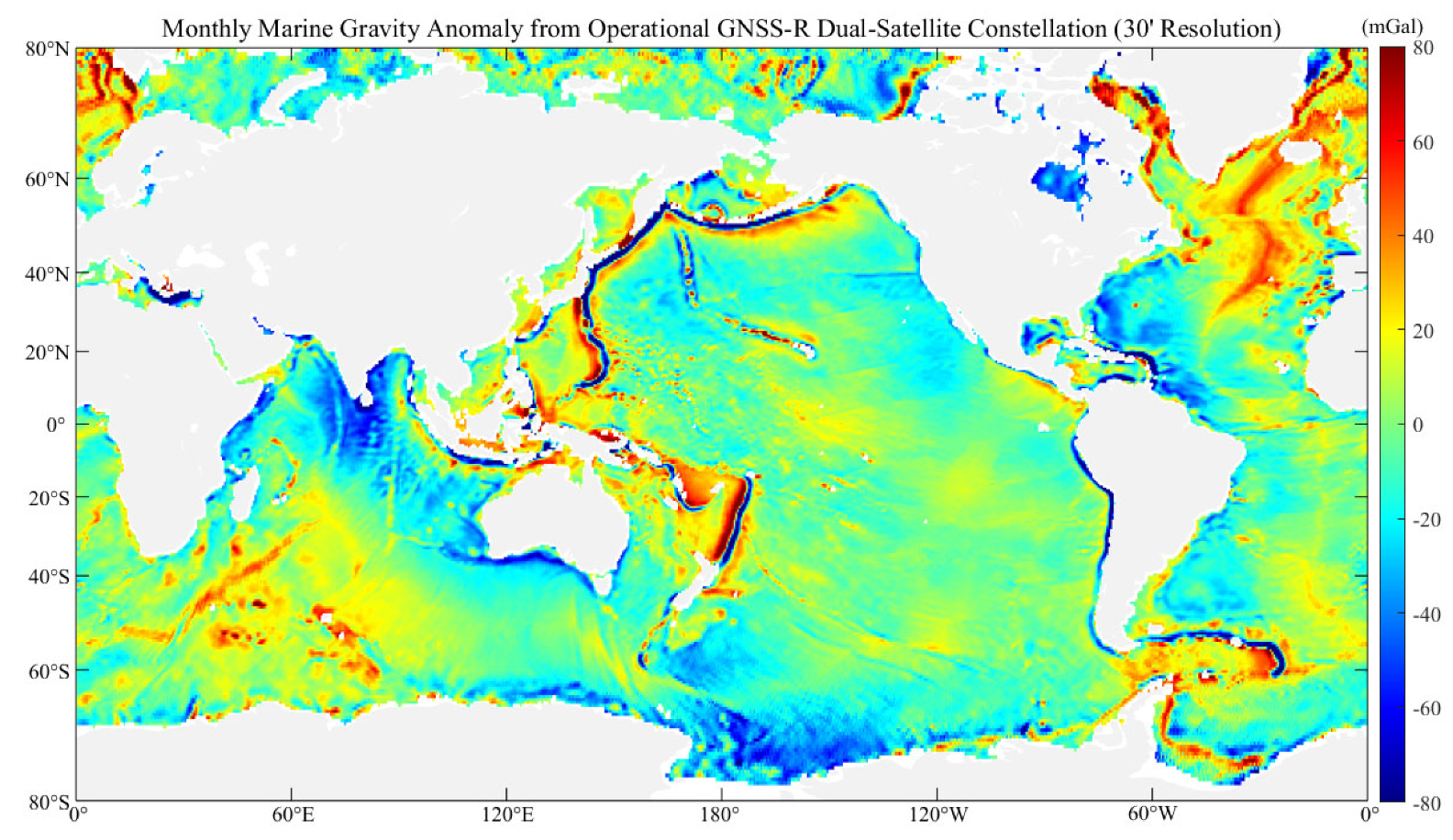
- Considering the low cost of constellation formation features of spaceborne GNSS-R technology, a dual-satellite constellation simulation experiment was conducted. The dual-satellite constellation improves the spatial resolution of time-variable gravity fields that can be inverted with the same level of accuracy. For example, in an Operational dual-satellite constellation scenario with a 5 mGal precision requirement for gravity field inversion, a dual-satellite constellation can invert a global monthly marine gravity anomaly on a 20′ grid, achieving an accuracy of 4.82 mGal.
- Increasing the number of revisits can compensate for the precision limitations of spaceborne GNSS-R interferometric altimetry, thereby enhancing the accuracy of the monthly marine gravity anomaly. It is worth noting that our study utilized only two GNSS-R satellites, each with fewer than four effective channels. Future improvements could involve increasing the number of satellites in the constellation or observation channels to enhance monthly coverage and average revisits.
- When inverting the global monthly marine gravity anomaly at a resolution finer than 10′, the precision of the inversion is significantly impacted by the accuracy of spaceborne GNSS-R interferometric altimetry. As the grid resolution improves, the need for high spatial resolution observations grows approximately proportional to the square of the grid resolution enhancement. Beyond a certain threshold, relying solely on increasing the number of satellites for network observations will also make it difficult to achieve sufficient revisits within a month. Therefore, enhancing the accuracy of spaceborne GNSS-R interferometric altimetry becomes particularly important at this stage.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Eshagh, M.; Jin, S.; Pail, R.; Barzaghi, R.; Tsoulis, D.; Tenzer, R.; Novák, P. Satellite Gravimetry: Methods, Products, Applications, and Future Trends. Earth-Sci. Rev. 2024, 253, 104783. [Google Scholar] [CrossRef]
- Zhao, J.; Wan, J.; Sun, Q.; Liu, S. Multi-Source Ocean Gravity Anomaly Data Fusion Processing Method. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 8275–8278. [Google Scholar]
- Wolff, M. Direct Measurements of the Earth’s Gravitational Potential Using a Satellite Pair. J. Geophys. Res. 1969, 74, 5295–5300. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE Measurements of Mass Variability in the Earth System. Science 2004, 305, 503–505. [Google Scholar] [CrossRef]
- Landerer, F.W.; Swenson, S.C. Accuracy of Scaled GRACE Terrestrial Water Storage Estimates. Water Resour. Res. 2012, 48, 2011WR011453. [Google Scholar] [CrossRef]
- Han, S.-C.; Shum, C.K.; Bevis, M.; Ji, C.; Kuo, C.-Y. Crustal Dilatation Observed by GRACE After the 2004 Sumatra-Andaman Earthquake. Science 2006, 313, 658–662. [Google Scholar] [CrossRef]
- Jacob, T.; Wahr, J.; Pfeffer, W.T.; Swenson, S. Recent Contributions of Glaciers and Ice Caps to Sea Level Rise. Nature 2012, 482, 514–518. [Google Scholar] [CrossRef]
- Wahr, J.M.; Jayne, S.R.; Bryan, F.O. A Method of Inferring Changes in Deep Ocean Currents from Satellite Measurements of Time-variable Gravity. J. Geophys. Res. Oceans 2002, 107, 11-1–11-17. [Google Scholar] [CrossRef]
- Jayne, S.R.; Wahr, J.M.; Bryan, F.O. Observing Ocean Heat Content Using Satellite Gravity and Altimetry. J. Geophys. Res. Oceans 2003, 108, 2002JC001619. [Google Scholar] [CrossRef]
- Weigelt, M.; Sneeuw, N.; Schrama, E.J.O.; Visser, P.N.A.M. An Improved Sampling Rule for Mapping Geopotential Functions of a Planet from a near Polar Orbit. J. Geod. 2013, 87, 127–142. [Google Scholar] [CrossRef]
- Yang, F.; Forootan, E.; Liu, S.; Schumacher, M. A Monte Carlo Propagation of the Full Variance-Covariance of GRACE-Like Level-2 Data with Applications in Hydrological Data Assimilation and Sea-Level Budget Studies. Water Resour. Res. 2024, 60, e2023WR036764. [Google Scholar] [CrossRef]
- Vishwakarma, B.D.; Devaraju, B.; Sneeuw, N. What Is the Spatial Resolution of Grace Satellite Products for Hydrology? Remote Sens. 2018, 10, 852. [Google Scholar] [CrossRef]
- Dahle, C.; Murböck, M.; Flechtner, F.; Dobslaw, H.; Michalak, G.; Neumayer, K.; Abrykosov, O.; Reinhold, A.; König, R.; Sulzbach, R.; et al. The GFZ GRACE RL06 Monthly Gravity Field Time Series: Processing Details and Quality Assessment. Remote Sens. 2019, 11, 2116. [Google Scholar] [CrossRef]
- Devaraju, B.; Sneeuw, N. On the Spatial Resolution of Homogeneous Isotropic Filters on the Sphere. In Proceedings of the VIII Hotine-Marussi Symposium on Mathematical Geodesy, Rome, Italy, 17–21 June 2013; Sneeuw, N., Novák, P., Crespi, M., Sansò, F., Eds.; International Association of Geodesy Symposia; Springer International Publishing: Cham, Switzerland, 2015; Volume 142, pp. 67–73. ISBN 978-3-319-24548-5. [Google Scholar]
- Chen, J.; Cazenave, A.; Dahle, C.; Llovel, W.; Panet, I.; Pfeffer, J.; Moreira, L. Applications and Challenges of GRACE and GRACE Follow-on Satellite Gravimetry. Surv. Geophys. 2022, 43, 305–345. [Google Scholar] [CrossRef]
- Chen, J.L.; Wilson, C.R.; Famiglietti, J.S.; Rodell, M. Spatial Sensitivity of the Gravity Recovery and Climate Experiment (GRACE) Time-variable Gravity Observations. J. Geophys. Res. Solid Earth 2005, 110, 2004JB003536. [Google Scholar] [CrossRef]
- Sandwell, D.; Garcia, E.; Soofi, K.; Wessel, P.; Chandler, M.; Smith, W.H.F. Toward 1-mGal Accuracy in Global Marine Gravity from CryoSat-2, Envisat, and Jason-1. Lead. Edge 2013, 32, 892–899. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Harper, H.; Tozer, B.; Smith, W.H.F. Gravity Field Recovery from Geodetic Altimeter Missions. Adv. Space Res. 2021, 68, 1059–1072. [Google Scholar] [CrossRef]
- Hwang, C.; Hsu, H.-Y.; Jang, R.-J. Global Mean Sea Surface and Marine Gravity Anomaly from Multi-Satellite Altimetry: Applications of Deflection-Geoid and Inverse Vening Meinesz Formulae. J. Geod. 2002, 76, 407–418. [Google Scholar] [CrossRef]
- Hwang, C. Inverse Vening Meinesz Formula and Deflection-Geoid Formula: Applications to the Predictions of Gravity and Geoid over the South China Sea. J. Geod. 1998, 72, 304–312. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Müller, R.D.; Smith, W.H.F.; Garcia, E.; Francis, R. New Global Marine Gravity Model from CryoSat-2 and Jason-1 Reveals Buried Tectonic Structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef]
- Hwang, C.; Chang, E.T.Y. Seafloor Secrets Revealed. Science 2014, 346, 32–33. [Google Scholar] [CrossRef]
- Guo, J.; Hwang, C.; Deng, X. Editorial: Application of Satellite Altimetry in Marine Geodesy and Geophysics. Front. Earth Sci. 2022, 10, 910562. [Google Scholar] [CrossRef]
- Richard, J.; Enjolras, V.; Rys, L.; Vallon, J.; Nann, I.; Escudier, P. Space Altimetry from Nano-Satellites: Payload Feasibility, Missions and System Performances. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 6–11 July 2008; pp. III-71–III-74. [Google Scholar]
- Li, Q.; Bao, L.; Shum, C.K. Altimeter-Derived Marine Gravity Variations Reveal the Magma Mass Motions within the Subaqueous Nishinoshima Volcano, Izu–Bonin Arc, Japan. J. Geod. 2021, 95, 46. [Google Scholar] [CrossRef]
- Guo, J.; Zhu, F.; Xin, L.; Xiaotao, C. Time-Varying Marine Gravity of Bay of Bengal Derived from CryoSat-2 Altimetry Data. Huazhong Keji Daxue Xuebao Ziran Kexue Ban J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2023, 51, 85–91. [Google Scholar] [CrossRef]
- Martin-Neira, M.; Li, W.; Andres-Beivide, A.; Ballesteros-Sels, X. “Cookie”: A Satellite Concept for GNSS Remote Sensing Constellations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4593–4610. [Google Scholar] [CrossRef]
- Hall, C.D.; Cordey, R.A. Multistatic Scatterometry. In Proceedings of the International Geoscience and Remote Sensing Symposium, “Remote Sensing: Moving Toward the 21st Century”, Edinburgh, UK, 12 September 1988; pp. 561–562. [Google Scholar]
- Martín-Neira, M. A Pasive Reflectometry and Interferometry System (PARIS) Application to Ocean Altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Clarizia, M.P.; Gommenginger, C.P.; Gleason, S.T.; Srokosz, M.A.; Galdi, C.; Di Bisceglie, M. Analysis of GNSS-R delay-Doppler Maps from the UK-DMC Satellite over the Ocean. Geophys. Res. Lett. 2009, 36, 2008GL036292. [Google Scholar] [CrossRef]
- Ruf, C.; Chang, P.; Clarizia, M.P.; Jelenak, Z.; Ridley, A.; Rose, R. CYGNSS: NASA Earth Venture Tropical Cyclone Mission; Meynart, R., Neeck, S.P., Shimoda, H., Eds.; SPIE: Amsterdam, The Netherlands, 2014; p. 924109. [Google Scholar]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea Surface Wind Speed Retrieval from the First Chinese GNSS-R Mission: Technique and Preliminary Results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef]
- Yang, G.; Bai, W.; Wang, J.; Hu, X.; Zhang, P.; Sun, Y.; Xu, N.; Zhai, X.; Xiao, X.; Xia, J.; et al. FY3E GNOS II GNSS Reflectometry: Mission Review and First Results. Remote Sens. 2022, 14, 988. [Google Scholar] [CrossRef]
- Unwin, M.J.; Pierdicca, N.; Cardellach, E.; Rautiainen, K.; Foti, G.; Blunt, P.; Guerriero, L.; Santi, E.; Tossaint, M. An Introduction to the HydroGNSS GNSS Reflectometry Remote Sensing Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6987–6999. [Google Scholar] [CrossRef]
- Huang, F.; Xia, J.; Yin, C.; Zhai, X.; Xu, N.; Yang, G.; Bai, W.; Sun, Y.; Du, Q.; Liao, M.; et al. Assessment of FY-3E GNOS-II GNSS-R Global Wind Product. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7899–7912. [Google Scholar] [CrossRef]
- Ruf, C.; Al-Khaldi, M.; Asharaf, S.; Balasubramaniam, R.; McKague, D.; Pascual, D.; Russel, A.; Twigg, D.; Warnock, A. Characterization of CYGNSS Ocean Surface Wind Speed Products. Remote Sens. 2024, 16, 4341. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Remote Sensing Using GNSS-R: A Review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef]
- Yin, C.; Xia, J.; Huang, F.; Li, W.; Bai, W.; Sun, Y.; Liu, C.; Yang, G.; Hu, X.; Xiao, X.; et al. Sea Ice Detection with FY3E GNOS II GNSS Reflectometry. In Proceedings of the 2021 IEEE Specialist Meeting on Reflectometry Using GNSS and Other Signals of Opportunity (GNSS+R), Beijing, China, 14 September 2021; pp. 36–38. [Google Scholar]
- Chew, C.C.; Small, E.E. Soil Moisture Sensing Using Spaceborne GNSS Reflections: Comparison of CYGNSS Reflectivity to SMAP Soil Moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Yin, C.; Huang, F.; Xia, J.; Bai, W.; Sun, Y.; Yang, G.; Zhai, X.; Xu, N.; Hu, X.; Zhang, P.; et al. Soil Moisture Retrieval from Multi-GNSS Reflectometry on FY-3E GNOS-II by Land Cover Classification. Remote Sens. 2023, 15, 1097. [Google Scholar] [CrossRef]
- Xu, T.; Wang, N.; He, Y.; Li, Y.; Meng, X.; Gao, F.; Lopez-Baeza, E. GNSS Reflectometry-Based Ocean Altimetry: State of the Art and Future Trends. Remote Sens. 2024, 16, 1754. [Google Scholar] [CrossRef]
- Clarizia, M.P.; Ruf, C.; Cipollini, P.; Zuffada, C. First Spaceborne Observation of Sea Surface Height Using GPS-Reflectometry. Geophys. Res. Lett. 2016, 43, 767–774. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Ribo, S.; Rius, A. Assessment of Spaceborne GNSS-R Ocean Altimetry Performance Using CYGNSS Mission Raw Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 238–250. [Google Scholar] [CrossRef]
- Mashburn, J.; Axelrad, P.; Zuffada, C.; Loria, E.; O’Brien, A.; Haines, B. Improved GNSS-R Ocean Surface Altimetry with CYGNSS in the Seas of Indonesia. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6071–6087. [Google Scholar] [CrossRef]
- Cardellach, E.; Li, W.; Rius, A.; Semmling, M.; Wickert, J.; Zus, F.; Ruf, C.S.; Buontempo, C. First Precise Spaceborne Sea Surface Altimetry with GNSS Reflected Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 102–112. [Google Scholar] [CrossRef]
- Dielacher, A.; Fragner, H.; Koudelka, O.; Beck, P.; Wickert, J.; Cardellach, E.; Hoeg, P. The ESA Passive Reflectometry and Dosimetry (Pretty) Mission. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5173–5176. [Google Scholar]
- Nguyen, V.A.; Nogués-Correig, O.; Yuasa, T.; Masters, D.; Irisov, V. Initial GNSS Phase Altimetry Measurements From the Spire Satellite Constellation. Geophys. Res. Lett. 2020, 47, e2020GL088308. [Google Scholar] [CrossRef]
- Roesler, C.J.; Morton, Y.J.; Wang, Y.; Nerem, R.S. Coherent GNSS-Reflections Characterization Over Ocean and Sea Ice Based on Spire Global CubeSat Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5801918. [Google Scholar] [CrossRef]
- Martin-Neira, M.; D’Addio, S.; Buck, C.; Floury, N.; Prieto-Cerdeira, R. The PARIS Ocean Altimeter In-Orbit Demonstrator. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2209–2237. [Google Scholar] [CrossRef]
- Cardellach, E.; Rius, A.; Martin-Neira, M.; Fabra, F.; Nogues-Correig, O.; Ribo, S.; Kainulainen, J.; Camps, A.; D’Addio, S. Consolidating the Precision of Interferometric GNSS-R Ocean Altimetry Using Airborne Experimental Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4992–5004. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Valencia I Domenech, E.; Pascual, D.; Martin, F.; Rius, A.; Ribo, S.; Benito, J.; Andres-Beivide, A.; Saameno, P.; et al. Optimization and Performance Analysis of Interferometric GNSS-R Altimeters: Application to the PARIS IoD Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1436–1451. [Google Scholar] [CrossRef]
- Wickert, J.; Cardellach, E.; Martin-Neira, M.; Bandeiras, J.; Bertino, L.; Andersen, O.B.; Camps, A.; Catarino, N.; Chapron, B.; Fabra, F.; et al. GEROS-ISS: GNSS REflectometry, Radio Occultation, and Scatterometry Onboard the International Space Station. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4552–4581. [Google Scholar] [CrossRef]
- Di Simone, A.; Park, H.; Riccio, D.; Camps, A. Ocean Target Monitoring with Improved Revisit Time Using Constellations of GNSS-R Instruments. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4102–4105. [Google Scholar]
- Li, Z.; Zuffada, C.; Lowe, S.T.; Lee, T.; Zlotnicki, V. Analysis of GNSS-R Altimetry for Mapping Ocean Mesoscale Sea Surface Heights Using High-Resolution Model Simulations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4631–4642. [Google Scholar] [CrossRef]
- Xie, J.; Bertino, L.; Cardellach, E.; Semmling, M.; Wickert, J. An OSSE Evaluation of the GNSS-R Altimetry Data for the GEROS-ISS Mission as a Complement to the Existing Observational Networks. Remote Sens. Environ. 2018, 209, 152–165. [Google Scholar] [CrossRef]
- Wei, Z.; Zhaowei, L.; Fan, W. Research Progress in Improving the Accuracy of Underwater Inertial/Gravity Integrated Navigation Based on the New Generation of GNSS-R Constellation Sea Surface Altimetry Principle. Kexue Jishu Yu Gongcheng 2019, 19, 21–36. [Google Scholar]
- Zhongmiao, S.U.N.; Bin, G.; Zhenhe, Z.; Mingda, O. Research Progress of Ocean Satellite Altimetry and Its Recovery of Global Marine Gravity Field and Seafloor Topography Model. Acta Geod. Cartogr. Sin. 2022, 51, 923. [Google Scholar] [CrossRef]
- Li, W.; Rius, A.; Fabra, F.; Cardellach, E.; Ribo, S.; Martin-Neira, M. Revisiting the GNSS-R Waveform Statistics and Its Impact on Altimetric Retrievals. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2854–2871. [Google Scholar] [CrossRef]
- Duan, L.; Xia, J.; Bai, W.; Zhai, Z.; Huang, F.; Yin, C.; Sun, Y.; Du, Q.; Wang, D.; Wang, X.; et al. Simulation Analysis of Inverting Marine Vertical Deflection Using Spaceborne GNSS-R Interferometric Altimetry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 2668–2679. [Google Scholar] [CrossRef]
- Huang, F.; Sun, Y.; Xia, J.; Yin, C.; Bai, W.; Du, Q.; Zhai, X.; Yang, G.; Chen, L.; Lu, W.; et al. Progress on the GNSS-R Product from Fengyun-3 Missions. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 6717–6720. [Google Scholar]
- Desai, S.D.; Wahr, J.M.; Chao, Y. Error Analysis of Empirical Ocean Tide Models Estimated from TOPEX/POSEIDON Altimetry. J. Geophys. Res. Oceans 1997, 102, 25157–25172. [Google Scholar] [CrossRef]
- Liu, Z.X.; Meng, X.H.; Wang, J.; Fang, Y. Parallelization improvement of vertical deviation method in the calculation of sea gravity field. Prog. Geophys. 2022, 37, 413–420. [Google Scholar] [CrossRef]
- Guo, J.; Wei, X.; Li, Z.; Jia, Y.; Chang, X.; Liu, X. SDUST2023GRA_MSS: The New Global Marine Gravity Anomaly Model Determined from Mean Sea Surface Model. Sci. Data 2025, 12, 108. [Google Scholar] [CrossRef]
- Huang, F.; Xia, J.; Yin, C.; Bai, W.; Sun, Y.; Du, Q.; Wang, X.; Cai, Y.; Duan, L. Characterization and Calibration of Spaceborne GNSS-R Observations Over the Ocean from Different BeiDou Satellite Types. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5804511. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Resolution | Scenarios | Mean (mGal) | RMS (mGal) | Coverage Rate | Revisits |
|---|---|---|---|---|---|
| 10′ | IOD | −0.06 | 28.37 | 72.62% | 2.34 |
| Operational | 0.05 | 13.22 | |||
| 15′ | IOD | −0.06 | 14.34 | 84.31% | 5.27 |
| Operational | −0.07 | 8.09 | |||
| 20′ | IOD | −0.08 | 8.98 | 89.83% | 9.39 |
| Operational | −0.08 | 6.15 | |||
| 25′ | IOD | −0.09 | 6.77 | 91.14% | 14.68 |
| Operational | −0.09 | 5.36 | |||
| 30′ | IOD | −0.10 | 5.70 | 91.91% | 21.14 |
| Operational | −0.11 | 4.93 |
| Grid Resolution | Scenarios | Mean (mGal) | RMS (mGal) | Coverage Rate | Revisits |
|---|---|---|---|---|---|
| 10′ | IOD | −0.04 | 20.35 | 87.83% | 4.81 |
| Operational | 0.04 | 9.73 | |||
| 15′ | IOD | −0.07 | 9.87 | 91.45% | 10.83 |
| Operational | −0.06 | 5.93 | |||
| 20′ | IOD | −0.08 | 6.52 | 92.24% | 19.28 |
| Operational | −0.08 | 4.82 | |||
| 25′ | IOD | −0.09 | 5.22 | 92.46% | 30.16 |
| Operational | −0.09 | 4.44 | |||
| 30′ | IOD | −0.10 | 4.68 | 92.50% | 43.43 |
| Operational | −0.10 | 4.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, L.; Bai, W.; Xia, J.; Zhai, Z.; Huang, F.; Yin, C.; Long, Y.; Sun, Y.; Du, Q.; Wang, X.; et al. Assessment of the Potential of Spaceborne GNSS-R Interferometric Altimetry for Monthly Marine Gravity Anomaly. Remote Sens. 2025, 17, 1178. https://doi.org/10.3390/rs17071178
Duan L, Bai W, Xia J, Zhai Z, Huang F, Yin C, Long Y, Sun Y, Du Q, Wang X, et al. Assessment of the Potential of Spaceborne GNSS-R Interferometric Altimetry for Monthly Marine Gravity Anomaly. Remote Sensing. 2025; 17(7):1178. https://doi.org/10.3390/rs17071178
Chicago/Turabian StyleDuan, Lichang, Weihua Bai, Junming Xia, Zhenhe Zhai, Feixiong Huang, Cong Yin, Ying Long, Yueqiang Sun, Qifei Du, Xianyi Wang, and et al. 2025. "Assessment of the Potential of Spaceborne GNSS-R Interferometric Altimetry for Monthly Marine Gravity Anomaly" Remote Sensing 17, no. 7: 1178. https://doi.org/10.3390/rs17071178
APA StyleDuan, L., Bai, W., Xia, J., Zhai, Z., Huang, F., Yin, C., Long, Y., Sun, Y., Du, Q., Wang, X., Wang, D., & Sun, Y. (2025). Assessment of the Potential of Spaceborne GNSS-R Interferometric Altimetry for Monthly Marine Gravity Anomaly. Remote Sensing, 17(7), 1178. https://doi.org/10.3390/rs17071178