Combined Use of Spectral and Structural Features for Improved Early Detection of Pine Shoot Beetle Attacks in Yunnan Pines

Abstract
1. Introduction
2. Materials and Methods
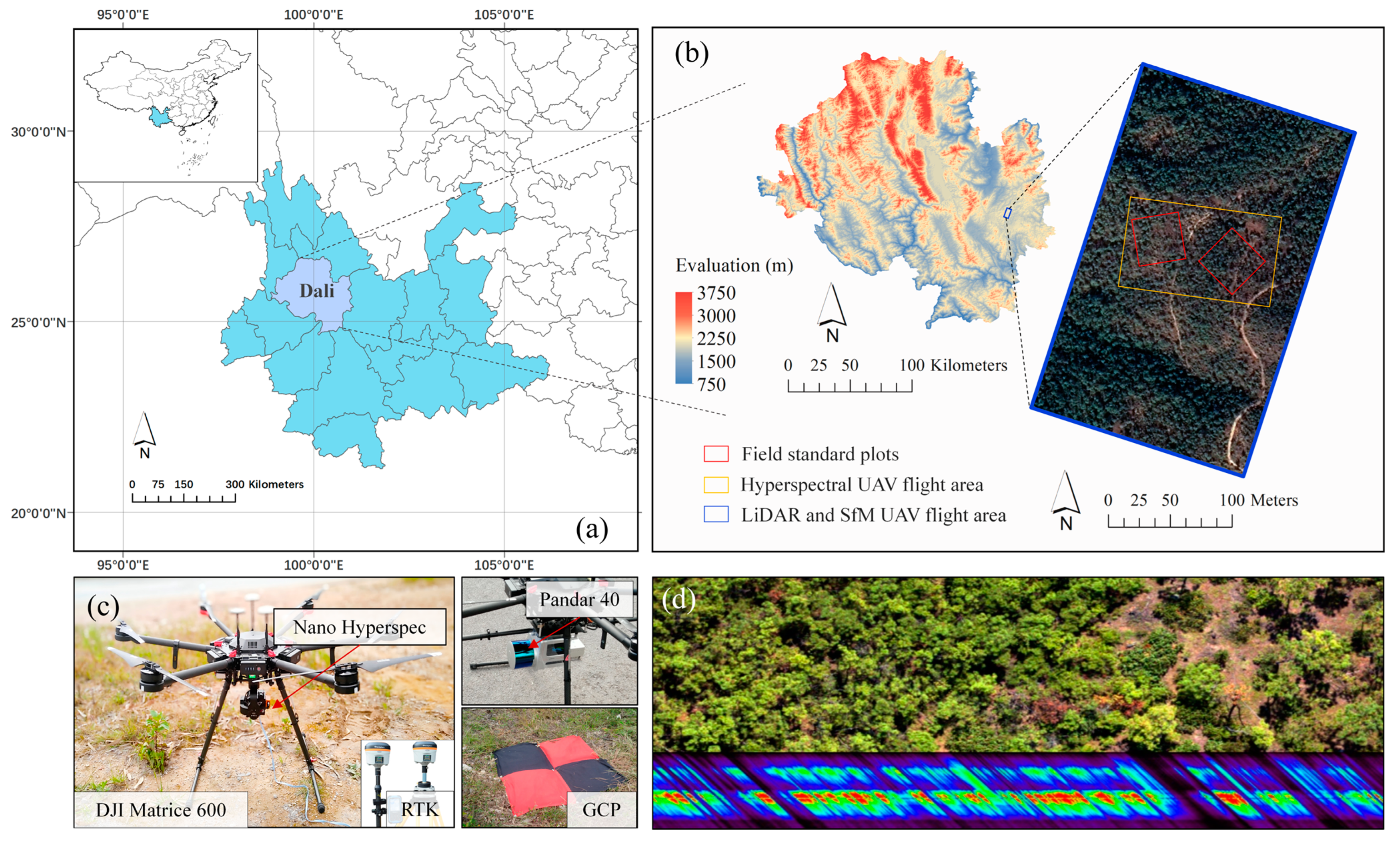
2.1. Study Site and Data Collection
2.2. UAV Data Acquisition
2.2.1. HSI Data Acquisition
2.2.2. LiDAR Data Acquisition
2.2.3. Photogrammetry Data Acquisition
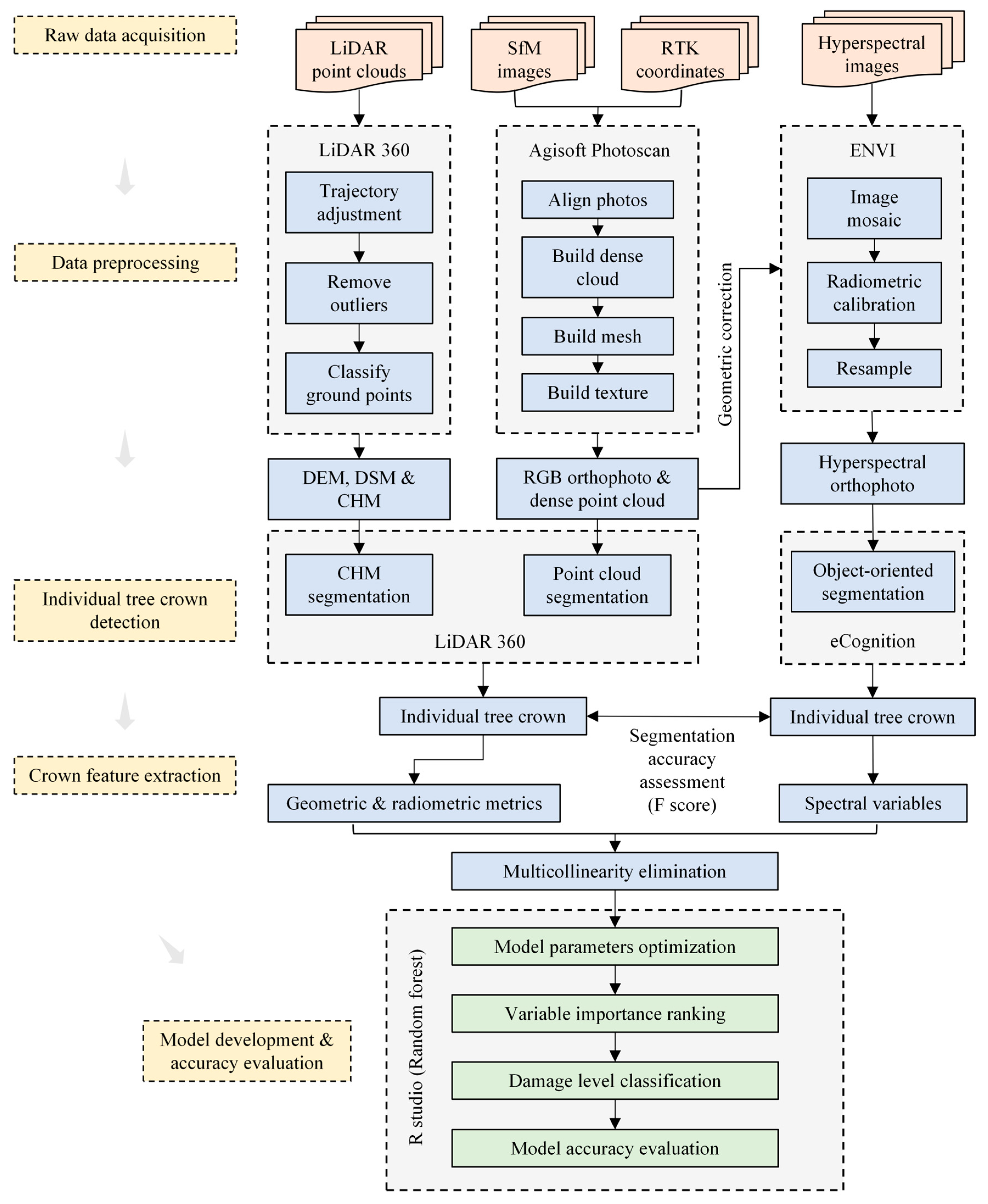
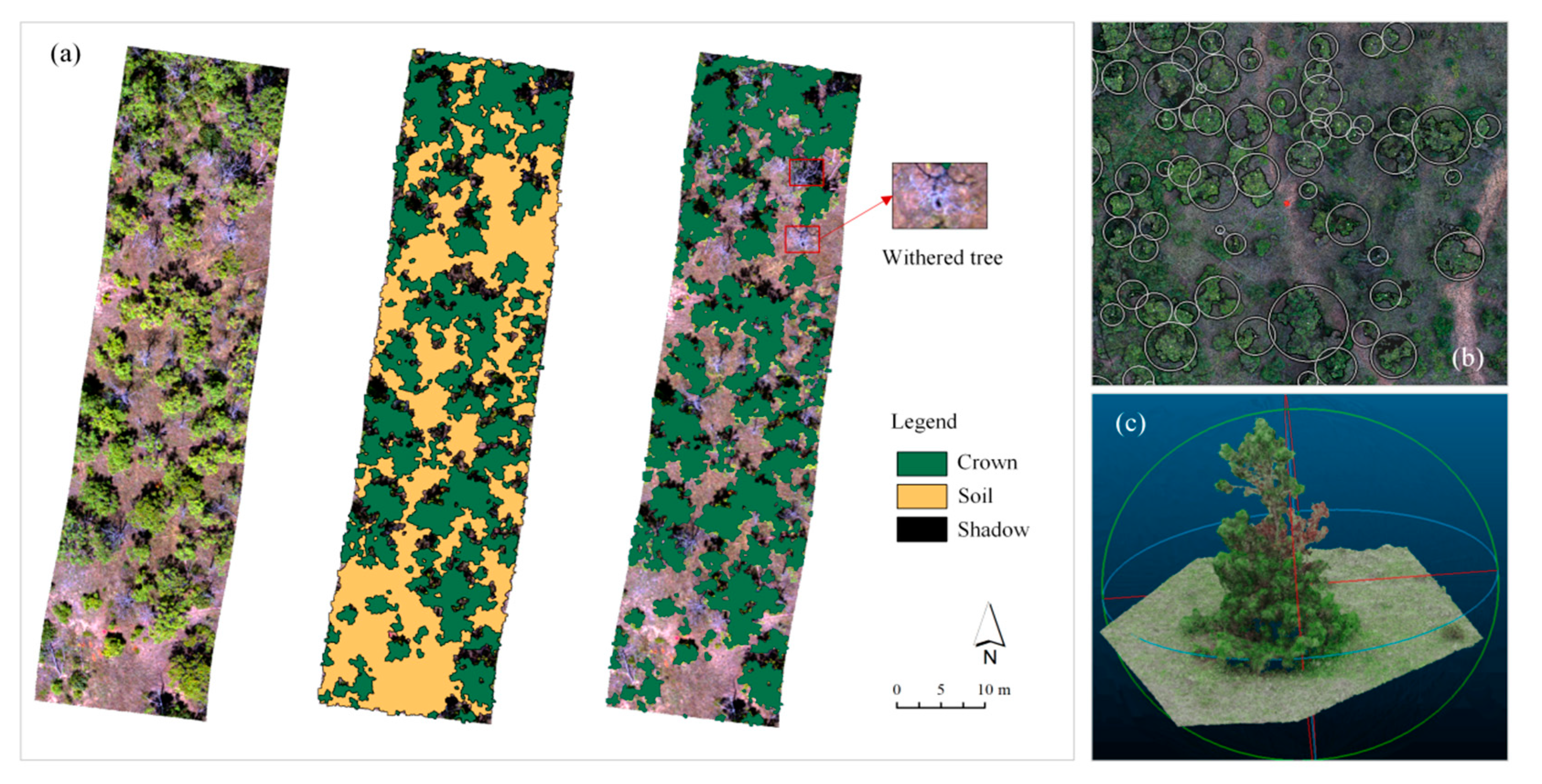
2.3. Individual Tree Crown Segmentation
2.4. Spectral and Structural Feature Extraction
2.5. Model Establishment and Performance Assessment
3. Results
3.1. Individual Tree Crown Detection
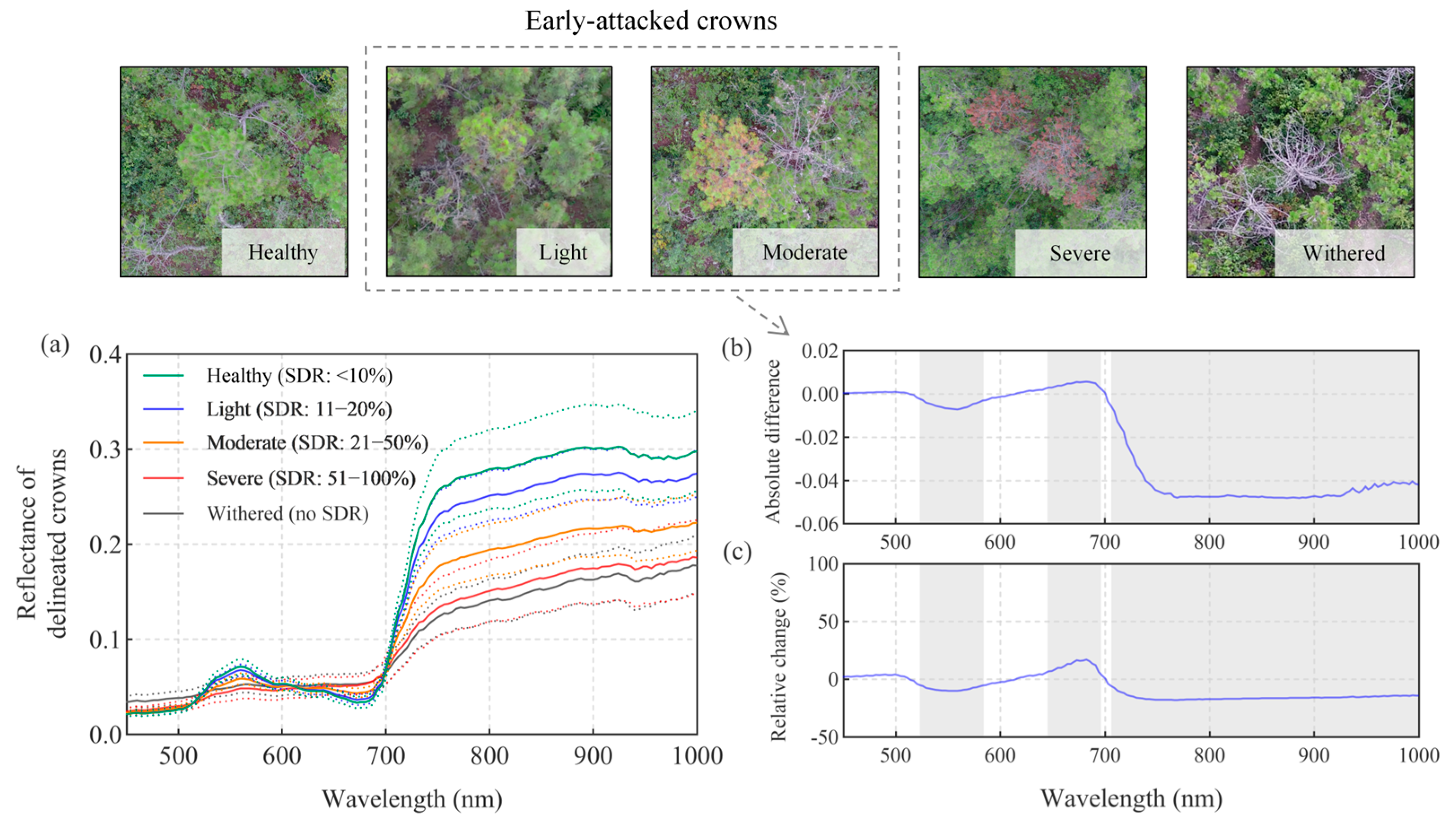
3.2. Spectral Signature
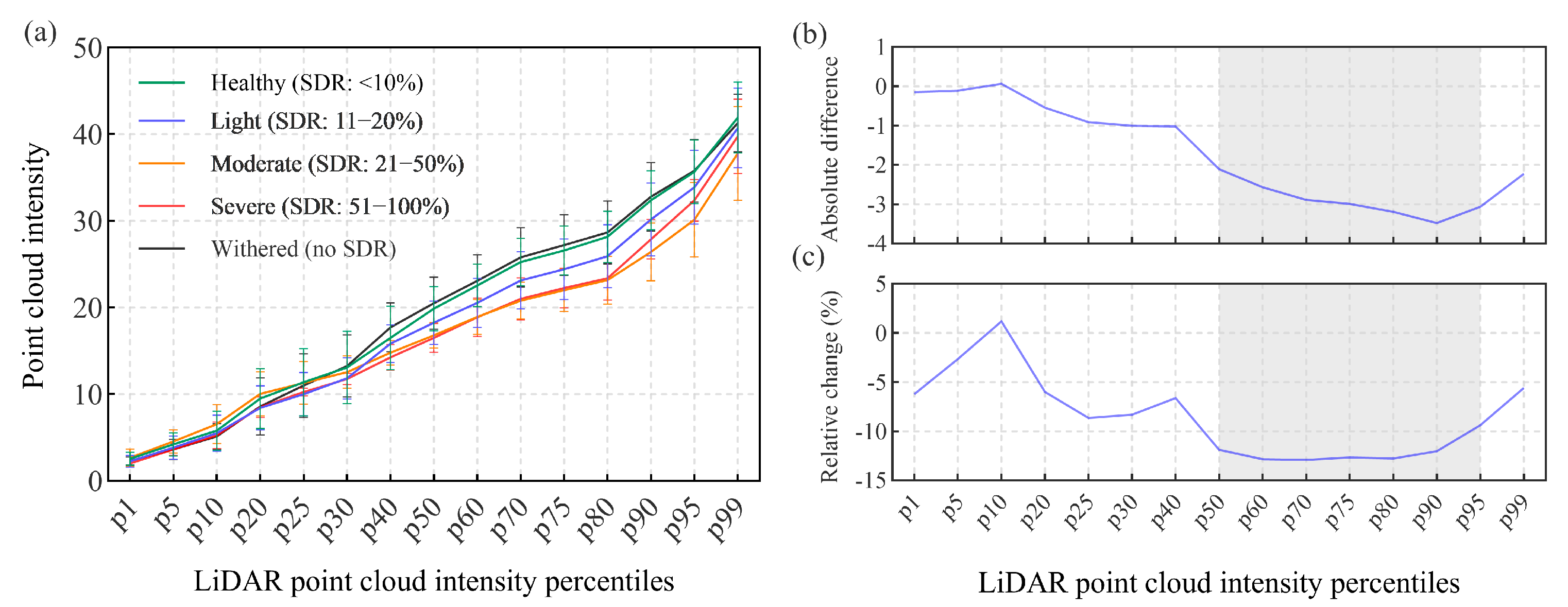
3.3. Structural Signature
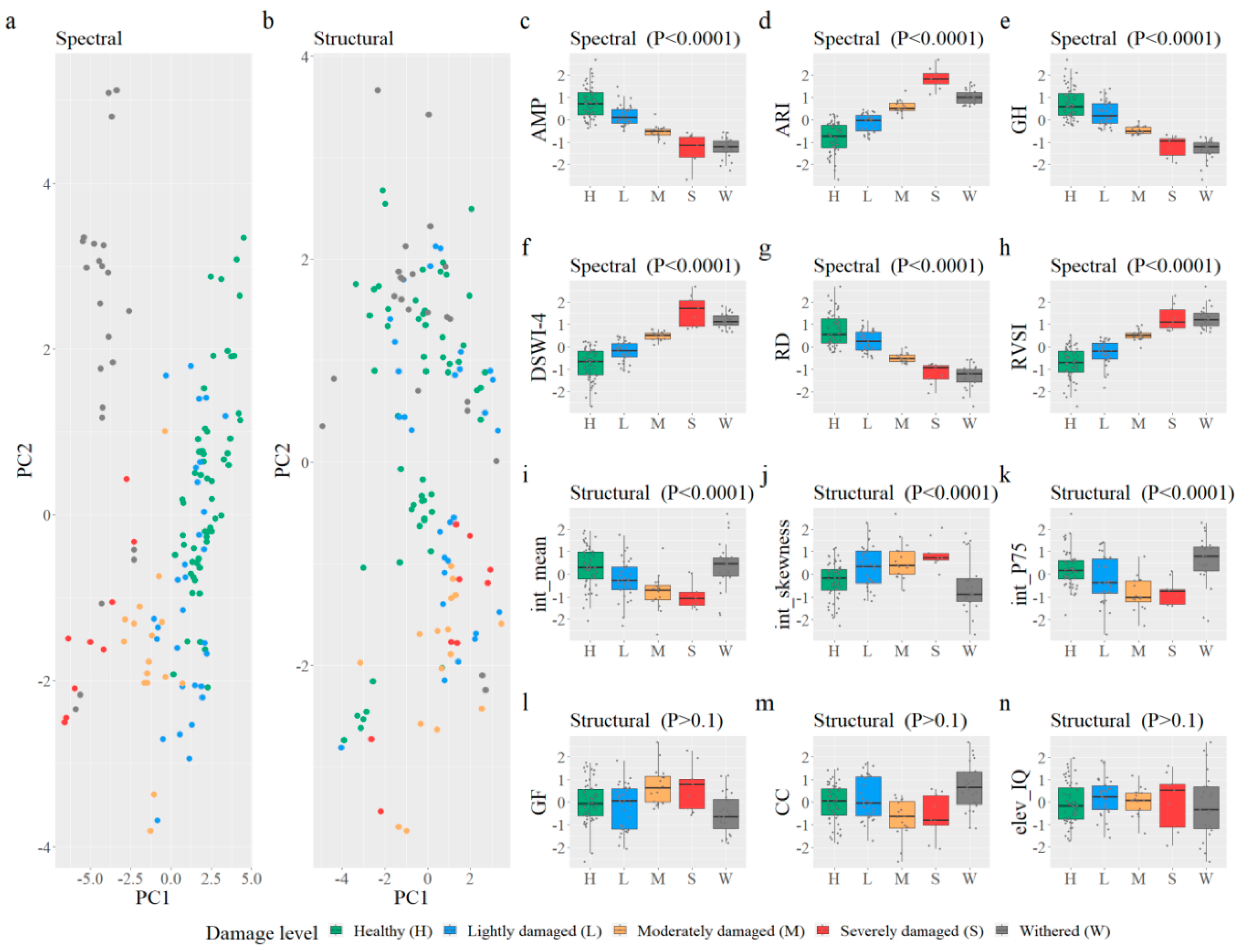
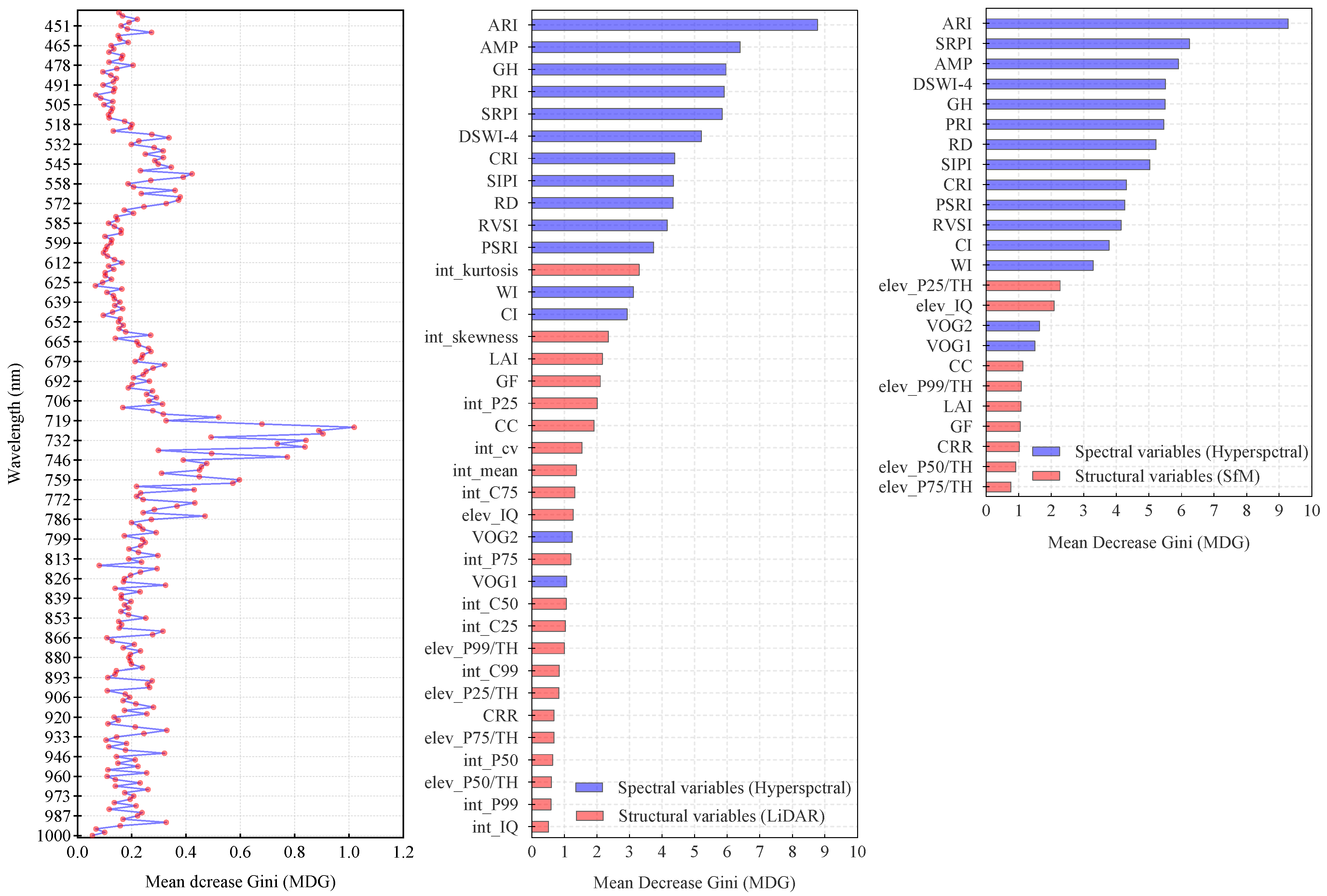
3.4. Feature Variables
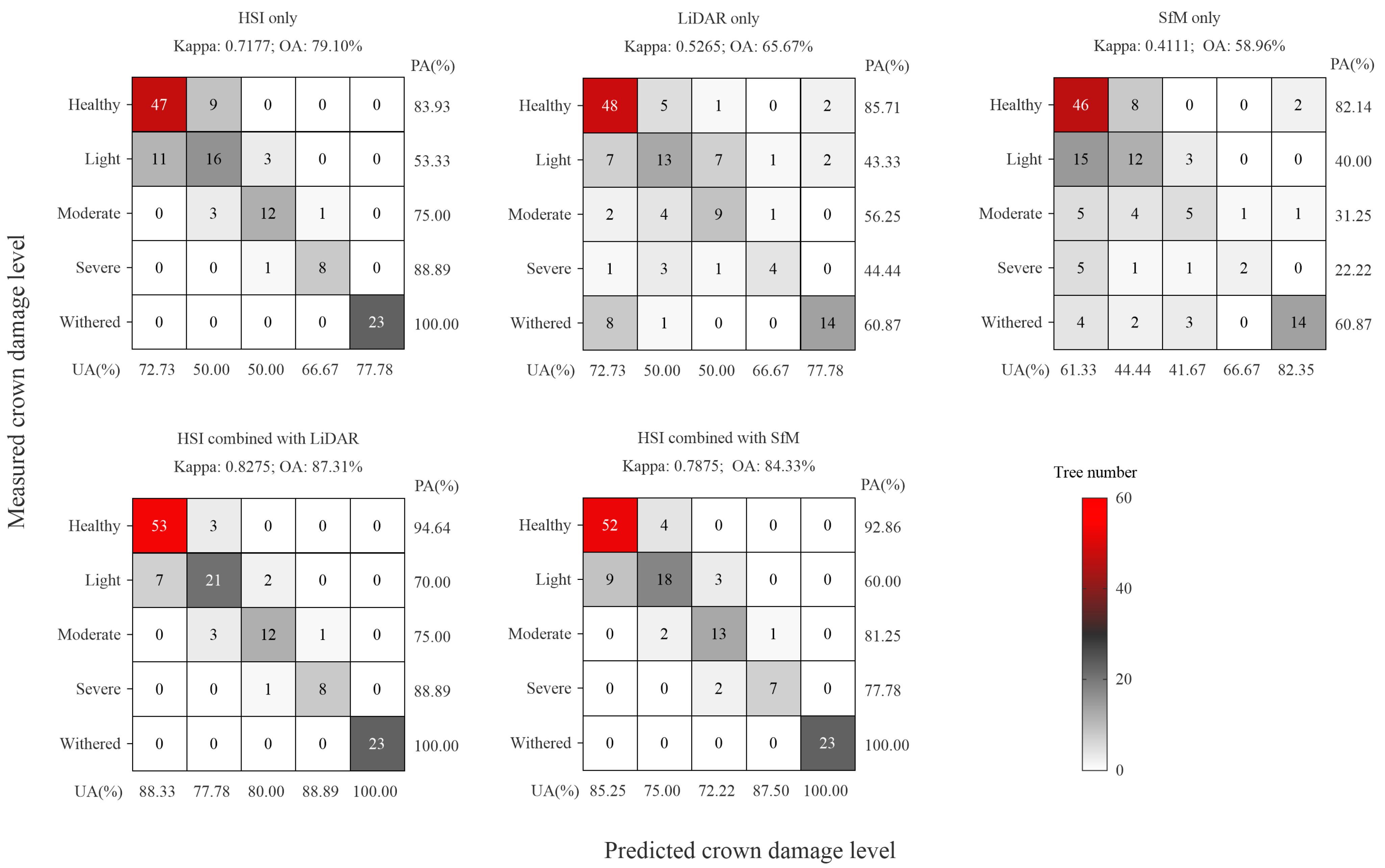
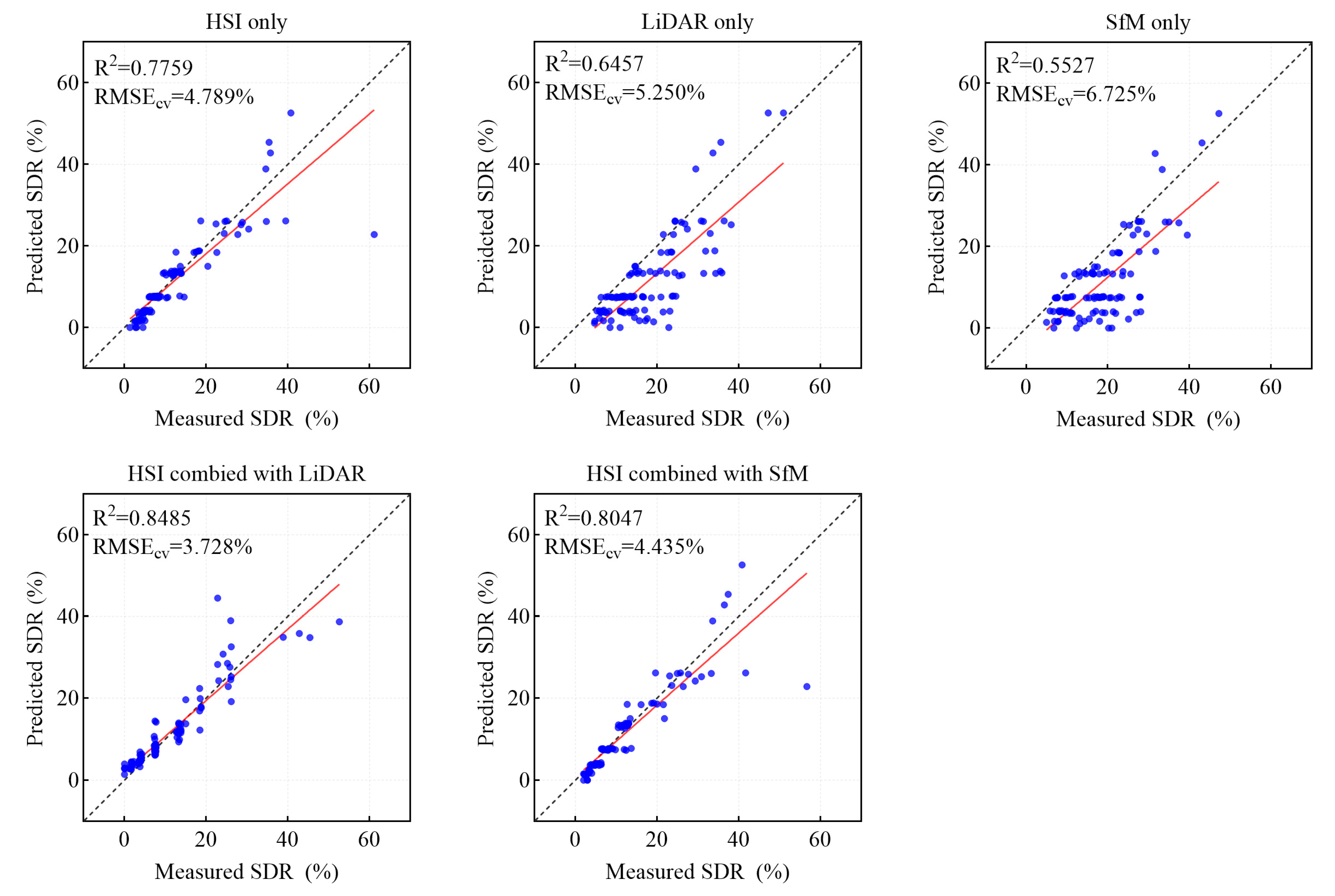
3.5. Integration of Different Data Sources for Modeling
4. Discussion
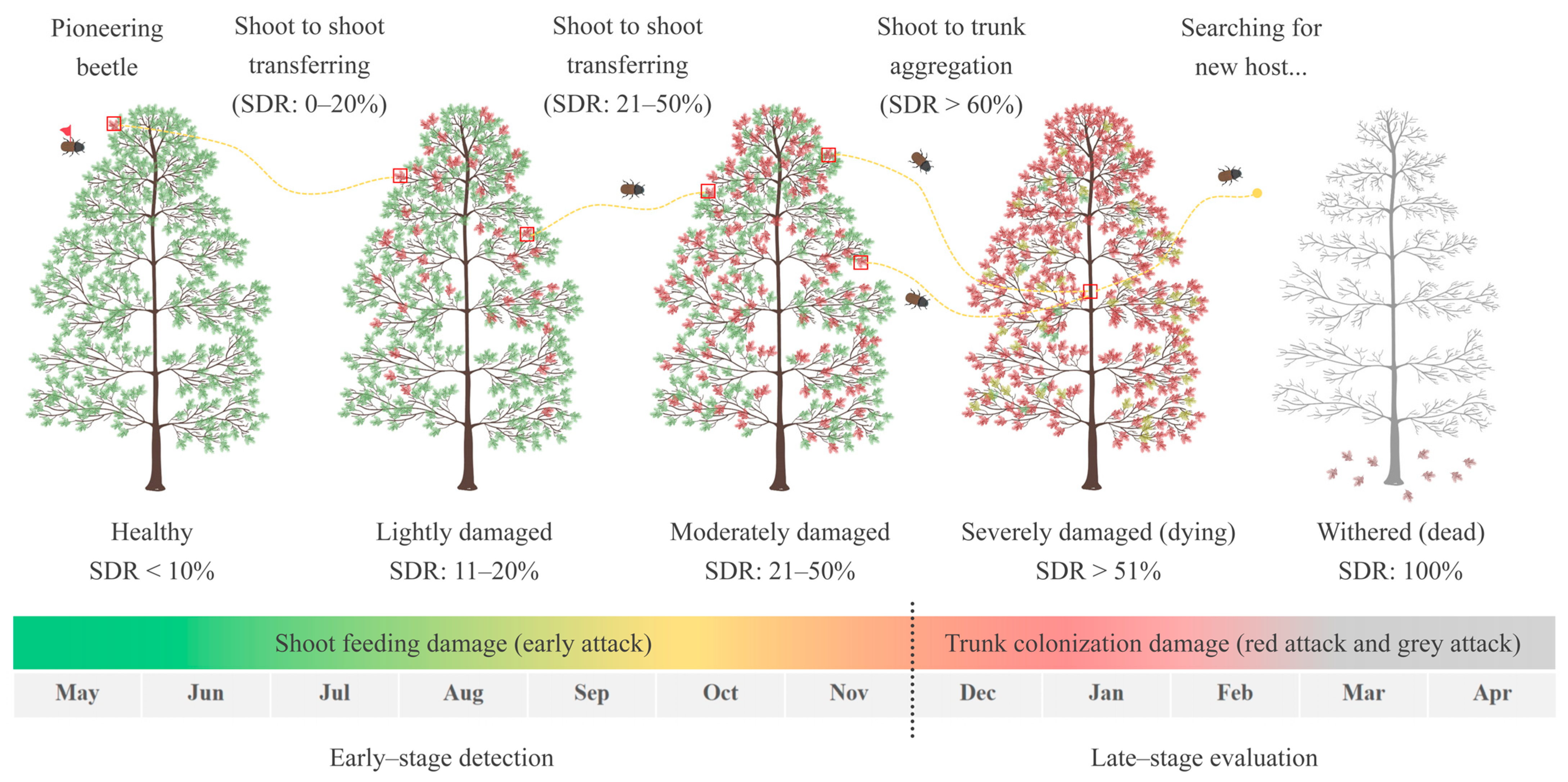
4.1. Definition of Pine Shoot Beetle Early Attacks
4.2. Contribution of Structural Features
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Seidl, R.; Schelhaas, M.J.; Rammer, W.; Verkerk, P.J. Increasing forest disturbances in Europe and their impact on carbon storage. Nat. Clim. Chang. 2014, 4, 806–810. [Google Scholar] [CrossRef]
- Luo, Y.Q.; Liu, Y.J.; Huang, H.G.; Yu, L.F.; Ren, L.L. Pathway and method of forest health assessment using remote sensing technology. J. Beijing For. Univ. 2021, 43, 1–13. [Google Scholar] [CrossRef]
- Lieutier, F.; Långström, B.; Faccoli, M. The Genus Tomicus. In Bark Beetles; Academic Press: Cambridge, MA, USA, 2015; pp. 371–426. [Google Scholar]
- Linnaeus, C. Systema Naturae Per Regna Tria Naturae, Secundum Classes, Ordines, Genera, Species, Cum Characteribus, Differentiis, Synonymis, Locis; Holmiae, Ed.; Wellcome Library: London, UK, 1758; Volume 1, p. 563. [Google Scholar]
- Lieutier, F.; Ye, H.; Yart, A. Shoot damage by Tomicus sp. (Coleoptera: Scolytidae) and effect on Pinus yunnanensis resistance to subsequent reproductive attacks in the stem. Agric. For. Entomol. 2003, 5, 227–233. [Google Scholar] [CrossRef]
- Långström, B.; Hellqvist, C. Shoot damage and growth losses following three years of Tomicus attacks in Scots pine stands close to a timber storage site. Silva Fenn. 1991, 25, 133–145. [Google Scholar] [CrossRef]
- Eidmann, H.H. Impact of bark beetles on forests and forestry in Sweden. J. Appl. Entomol. 1992, 114, 193–200. [Google Scholar] [CrossRef]
- Czokajlo, D.; Wink, R.A.; Warren, J.C.; Teale, S.A. Growth reduction of Scots pine, Pinus sylvestris, caused by the larger pine shoot beetle, Tomicus piniperda (Coleoptera, Scolytidae), in New York State. Can. J. For. Res. 1997, 27, 1394–1397. [Google Scholar] [CrossRef]
- Schlyter, F.; Löfqvist, J. Colonization pattern in the pine shoot beetle, Tomicus piniperda: Effects of host declination, structure and presence of conspecifics. Entomol. Exp. Appl. 1990, 54, 163–172. [Google Scholar] [CrossRef]
- Långström, B.; Hellqvist, C. Scots pine susceptibility to attack by Tomicus piniperda (L) as related to pruning date and attack density. In Annales des Sciences Forestières; EDP Sciences: London, UK, 1993; Volume 50, pp. 101–117. [Google Scholar] [CrossRef]
- Ye, H.; Li, L.S. The distribution of Tomicus piniperda (L.) population in the crown of Yunnan pine during the shoot feeding period. Acta Entomol. Sin. 1994, 37, 311–316. [Google Scholar]
- Långström, B.; Li, L.S.; Liu, H.P. Shoot feeding ecology of Tomicus piniperda and T. minor (Col. Scolytidae) in southern China. J. Appl. Entomol. 2002, 126, 333–342. [Google Scholar] [CrossRef]
- Zhang, Y. New ideas for controlling Tomicus piniperda. Yunnan For. 2003, 2, 18–19. [Google Scholar] [CrossRef]
- Luo, Y.Q.; Huang, H.G.; Roques, A. Early monitoring of forest wood-boring pests with remote sensing. Annu. Rev. Entomol. 2023, 68, 277–298. [Google Scholar] [CrossRef]
- Li, Y.S.; Yuan, W.H.; Sun, J.H.; Ma, W.Q.; Chen, X.H.; Lian, Y. Temporal and spatial distribution of hourly precipitation in rainy and dry seasons over Yunnan province. Plateau Mt. Meteorol. Res. 2021, 41, 24–32. [Google Scholar]
- Xue, J.; Yu, L.F.; Lin, Q.N.; Liu, G.; Huang, H.G. Using sentinel-1 multi-temporal InSAR data to monitor the damage degree of shoot beetle in Yunnan pine forest. Remote Sens. Land. Resour. 2018, 30, 108–114. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R.; Hostert, P. Remote sensing of forest insect disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 49–60. [Google Scholar] [CrossRef]
- Stone, C.; Mohammed, C. Application of remote sensing technologies for assessing planted forests damaged by insect pests and fungal pathogens: A review. Curr. For. Rep. 2017, 3, 75–92. [Google Scholar] [CrossRef]
- Hernández-Clemente, R.; Hornero, A.; Mottus, M.; Penuelas, J.; González-Dugo, V.; Jiménez, J.C.; Suárez, L.; Alonso, L.; Zarco-Tejada, P.J. Early diagnosis of vegetation health from high-resolution hyperspectral and thermal imagery: Lessons learned from empirical relationships and radiative transfer modelling. Curr. For. Rep. 2019, 5, 169–183. [Google Scholar] [CrossRef]
- Lin, Q.N.; Huang, H.G.; Yu, L.F.; Wang, J.X. Detection of shoot beetle stress on Yunnan pine forest using a coupled LIBERTY2-INFORM simulation. Remote Sens. 2018, 10, 1133. [Google Scholar] [CrossRef]
- Wang, H.; Shi, L.; Ma, Y.; Shu, Q.-T.; Liao, H.-J.; Du, T. Research of damage monitoring models and judgment rules of Pinus yunnanensis with Tomicus yunnanensis. For. Res. 2018, 31, 53–60. [Google Scholar]
- Liu, M.Y.; Zhang, Z.H.; Liu, X.L.; Yao, J.; Du, T.; Ma, Y.Q.; Shi, L. Discriminant analysis of the damage degree caused by pine shoot beetle to yunnan pine using uav-based hyperspectral images. Forests 2020, 11, 1258. [Google Scholar] [CrossRef]
- Wang, J.X.; Huang, H.G.; Lin, Q.N.; Wang, B.; Huang, K. Shoot beetle damage to Pinus yunnanensis monitored by infrared thermal imaging at needle scale. Chin. J. Plant Ecol. 2019, 43, 959–968. [Google Scholar] [CrossRef]
- Wang, J.X.; Meng, S.W.; Lin, Q.N.; Liu, Y.Y.; Huang, H.G. Detection of Yunnan pine shoot beetle stress using UAV-based thermal imagery and LiDAR. Appl. Sci. 2022, 12, 4372. [Google Scholar] [CrossRef]
- Liu, Y.J.; Zhan, Z.Y.; Ren, L.L.; Ze, S.Z.; Yu, L.F.; Jiang, Q.; Luo, Y.Q. Hyperspectral evidence of early-stage pine shoot beetle attack in Yunnan pine. For. Ecol. Manag. 2021, 497, 119505. [Google Scholar] [CrossRef]
- Yu, L.F.; Huang, J.X.; Zong, S.X.; Huang, H.G.; Luo, Y.Q. Detecting shoot beetle damage on yunnan pine using landsat time-series data. Forests 2018, 9, 39. [Google Scholar] [CrossRef]
- Lin, Q.N.; Huang, H.G.; Chen, L.; Wang, J.X.; Huang, K.; Liu, Y.Y. Using the 3D model RAPID to invert the shoot dieback ratio of vertically heterogeneous Yunnan pine forests to detect beetle damage. Remote Sens. Environ. 2021, 260, 112475. [Google Scholar] [CrossRef]
- Lin, Q.N.; Huang, H.G.; Wang, J.X.; Chen, L.; Du, H.Q.; Zhou, G.M. Early detection of pine shoot beetle attack using vertical profile of plant traits through UAV-based hyperspectral, thermal, and lidar data fusion. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103549. [Google Scholar] [CrossRef]
- Solberg, S.; Næsset, E.; Hanssen, K.H.; Christiansen, E. Mapping defoliation during a severe insect attack on Scots pine using airborne laser scanning. Remote Sens. Environ. 2006, 102, 364–376. [Google Scholar] [CrossRef]
- Liu, L.X.; Coops, N.C.; Aven, N.W.; Pang, Y. Mapping urban tree species using integrated airborne hyperspectral and lidar remote sensing data. Remote Sens. Environ. 2017, 200, 170–182. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Lisein, J.; Deseilligny, M.P.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; Mcvay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Lin, Q.N.; Huang, H.G.; Wang, J.X.; Huang, K.; Liu, Y.Y. Detection of pine shoot beetle (PSB) stress on pine forests at individual tree level using UAV-based hyperspectral imagery and Lidar. Remote Sens. 2019, 11, 2540. [Google Scholar] [CrossRef]
- LY/T1681–2006; Standard of Forest Pest Occurrence and Disaster. State Forestry Administration: Beijing, China, 2006.
- Zhao, X.Q.; Guo, Q.H.; Su, Y.J.; Xue, B.L. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Li, Z.Y.; Liu, Q.W.; Pang, Y. Review on forest parameters inversion using LiDAR. J. Remote Sens. 2016, 20, 1138–1150. [Google Scholar]
- Zarco-Tejada, P.J.; Hornero, A.; Beck, P.S.A.; Kattenborn, T.; Kempeneers, P.; Hernández-Clemente, R. Chlorophyll content estimation in an open-canopy conifer forest with Sentinel-2A and hyperspectral imagery in the context of forest decline. Remote Sens. Environ. 2019, 223, 320–335. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland using Small Footprint LIDAR data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Li, W.K.; Guo, Q.H.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, R. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In Advances in Information Retrieval; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar] [CrossRef]
- Sokolova, M.; Japkowicz, N.; Szpakowicz, S. Beyond Accuracy, F-Score and ROC: A family of discriminant measures for performance evaluation. Lect. Notes Comput. Sci. 2006, 4304, 1015–1021. [Google Scholar] [CrossRef]
- Li, P.H.; Shen, X.; Dai, J.S.; Cao, L. Comparisons and accuracy assessments of LiDAR-Based tree segmentation approaches in planted forests. Sci. Silvae Sin. 2018, 54, 127–136. [Google Scholar]
- Guyot, G.; Baret, F. Utilisation de la haute résolution spectrale pour suivre l’état des couverts végétaux. Spectr. Signat. Objects Remote Sens. 1988, 287, 279. [Google Scholar]
- Filella, I.; Penuelas, J. The red-edge position and shape as indicators of plant chlorophyll content, biomass and hydric status. Int. J. Remote Sens. 1994, 15, 1459–1470. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Remote estimation of chlorophyll content in higher plant leaves. Int. J. Remote Sens. 1997, 18, 2691–2697. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Huete, A.R.; Liu, H.Q.; Batchily, K.A. Comparison of vegetation indices global set of TM images for EOS–MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Peñuelas, J.; Filella, I.; Lloret, P. Reflectance assessment of mite effects on apple trees. Int. J. Remote Sens. 1995, 16, 2727–2733. [Google Scholar] [CrossRef]
- Gamon, J.A.; Penuelas, J.; Field, C.B. A Narrow-waveband spectral index that tracks diurnal changes in photosynthetic efficiency. Remote Sens. Environ. 1992, 41, 35–44. [Google Scholar] [CrossRef]
- Merzlyak, M.N.; Gitelson, A.A.; Chivkunova, O.B.; Rakitin, V.Y. Non-destructive optical detection of pigment changes during leaf senescence and fruit ripening. Physiol. Plant. 1999, 106, 135–141. [Google Scholar] [CrossRef]
- Carter, G.A. Ratios of leaf reflectance in narrow wavebands as indicator of plant stress. Int. J. Remote Sens. 1994, 15, 697–704. [Google Scholar] [CrossRef]
- Merton, R.; Huntington, J. Early simulation results of the ARIES-1 satellite sensor for multi-temporal vegetation research derived from AVIRIS. In Proceedings of the Eighth Annual JPL Airborne Earth Science Workshop, Pasadena, CA, USA, 9–11 February 1999. [Google Scholar]
- Vogelman, J.E.; Rock, B.N.; Moss, D.M. Red-edge spectral measurements from sugar maple leaves. Int. J. Remote Sens. 1993, 14, 1563–1575. [Google Scholar] [CrossRef]
- Peñuelas, J.; Pinol, J.; Ogaya, R.; Filella, I. Estimation of plant water concentration by the reflectance Water Index WI (R900/R970). Int. J. Remote Sens. 1997, 18, 2869–2875. [Google Scholar] [CrossRef]
- Apan, A.; Held, A.; Phinn, S.; Markley, J. Formulation and assessment of narrow-band vegetation indices from EO-1 Hyperion imagery for discriminating sugarcane disease. In Proceedings of the Spatial Sciences Institute Biennial Conference (SSC 2003): Spatial Knowledge Without Boundaries; Spatial Sciences Institute: Los Angeles, CA, USA, 2003; pp. 1–13. [Google Scholar]
- Gamon, J.A.; Surfus, J.S. Assessing leaf pigment content and activity with a reflectometer. New Phytol. 2010, 143, 105–117. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N.; Zur, Y.; Stark, R.; Gritz, U. Non-destructive and remote sensing techniques for estimation of vegetation status. Nat. Resour. 2001, 273. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and regression by random Forest. R News 2002, 2, 18–22. [Google Scholar]
- Cohen, J. Weighted Kappa: Nominal scale agreement with provision for scaled disagreement or partial credit. Psychol. Bull. 1968, 70, 213–220. [Google Scholar] [CrossRef]
- Coops, N.C.; Johnson, M.; Wulder, M.A.; White, J.C. Assessment of QuickBird high spatial resolution imagery to detect red attack damage due to mountain pine beetle infestation. Remote Sens. Environ. 2006, 103, 67–80. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; McGaughey, R.; Andersen, H.E.; Negrón, J. Predicting live and dead tree basal area of bark beetle affected forests from discrete-return lidar. Can. J. Remote Sens. 2013, 39, S99–S111. [Google Scholar] [CrossRef]
- Netherer, S.; Matthews, B.; Katzensteiner, K.; Blackwell, E.; Henschke, P.; Hietz, P.; Pennerstorfer, J.; Rosner, S.; Kikuta, S.; Schume, H.; et al. Do water-limiting conditions predispose norway spruce to bark beetle attack? New Phytol. 2015, 205, 1128–1141. [Google Scholar] [CrossRef] [PubMed]
- Yu, R.; Luo, Y.Q.; Zhou, Q.; Zhang, X.D.; Wu, D.W.; Ren, L.L. Early detection of pine wilt disease using deep learning algorithms and UAV-based multispectral imagery. For. Ecol. Manag. 2021, 497, 119493. [Google Scholar] [CrossRef]
- Zhang, H.M.; Lu, Y.G. A review on detection of dead trees with pine wilt disease based on UAV remote sensing in China. East China For. Manag. 2017, 31, 29–32. (In Chinese) [Google Scholar]
- Liu, Y.J.; Liu, Y.J.; Gao, B.T.; Gao, B.T.; Ren, L.L.; Ren, L.L.; Zong, S.X.; Zong, S.X.; Ze, S.Z.; Ze, S.Z.; et al. Niche-based relationship between sympatric bark living insect pests and tree vigor decline of Pinus yunnanensis. J. Appl. Entomol. 2019, 143, 1161–1171. [Google Scholar] [CrossRef]
- LY/T 2352–2014; Technical Regulations for Cleaning Damaged Trees by Yunnan Pine Shoot Beetles. State Forestry Administration: Beijing, China, 2014.
- Yu, L.F.; Zhan, Z.Y.; Ren, L.L.; Zong, S.X.; Huang, H.G. Evaluating the potential of worldView-3 data to classify different shoot damage ratios of Pinus yunnanensis. Forests 2020, 11, 417. [Google Scholar] [CrossRef]
- Yu, L.F.; Huang, H.G.; Ze, S.Z.; Ren, L.L.; Zong, S.X.; Lu, W.J.; Luo, Y.Q. Research on the spatial distribution patterns of Tomicus sp. in Pinus yunnanensis during the shoot feeding period. Chin. J. Appl. Entomol. 2017, 54, 940–946. [Google Scholar]
- Wu, C.X. Chemical Ecological Mechanism of coexistence among three Tomicus species. Chin. Acad. For. 2019, 45, 227–240. [Google Scholar]
- He-Ya, S.; Huang, X.; Zhou, D.; Zhang, J.; Bao, G.; Tong, S.; Bao, Y.; Ganbat, D.; Tsagaantsooj, N.; Altanchimeg, D.; et al. Identification of larch caterpillar infestation severity based on unmanned aerial vehicle multispectral and LiDAR features. Forests 2024, 15, 191. [Google Scholar] [CrossRef]
- Zhou, Q.; Kuang, J.; Yu, L.; Zhang, X.; Ren, L.; Luo, Y. Discriminating between biotic and abiotic stress in poplar forests using hyperspectral and LiDAR data. Remote Sens. 2024, 16, 3751. [Google Scholar] [CrossRef]
- Yu, L.F.; Zhan, Z.Y.; Zhou, Q.; Gao, B.T.; Ren, L.L.; Huang, H.G.; Luo, Y.Q. Climate drivers of pine shoot beetle outbreak dynamics in Southwest China. Remote Sens. 2022, 14, 2728. [Google Scholar] [CrossRef]
- Huang, K. Research on Estimation Method of Forest Tree Shoot Damage Ratio Combined with Miniature Laser Radar and Infrared Camera; Beijing Forestry University: Beijing, China, 2020. [Google Scholar]
- Shrestha, A.; Hicke, J.A.; Meddens, A.J.H.; Karl, J.W.; Stahl, A.T. Evaluating a novel approach to detect the vertical structure of insect damage in trees using multispectral and three-dimensional data from drone imagery in the Northern Rocky mountains, USA. Remote Sens. 2024, 16, 1365. [Google Scholar] [CrossRef]
- Shen, X. Estimation and Simulation of the Growth of Main Forest Stands and Physiological Parameters in Jiangsu; Nanjing Forestry University: Nanjing, China, 2021. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Nano Hyperspec | Pandar 40 | Zenmuse X5S |
|---|---|---|---|
| Spatial resolution | 0.2 m/pix | 200–1800 points/m2 | 0.05 m/pix |
| Spectral resolution (band) | 270 | 1 | 3 |
| Camera setting | 8° (FOV) | 10° (off-nadir viewing angle) | 72° (FOV)/45° (camera angle) |
| Flight height (m) | 70 | 70 | 55 |
| Flight speed (m/s) | 8 | 8 | 5 |
| Along/across-track overlap (%) | 80/60 | 80/60 | 80/70 |
| Solar zenith (°)/azimuth (°) | 25/175 | ||
| Illumination condition | Sunny (clear sky with less than 30% cloud cover) | ||
| Number of ground control points | 10 | ||
| Spectral Variables | Formula and Description | Reference |
|---|---|---|
| Red-edge position linear interpolation (REP_LiA) | 700 + 40 × ((R670 + R780)/2 − R700)/(R740 − R700) | [45] |
| dRE (AMP) | Max 1st derivative in red edge region | [46] |
| Sum_Dr2A | Sum of 1st derivative reflectance between R680 and R780 | |
| Simple ratio index (SR) | R800/R680 | [47] |
| Simple ratio index 2 (SR2) | R750/R700 | [48] |
| Normalized difference vegetation index (NDVI) | (R800 − R670)/(R800 + R670) | [49] |
| Green normalized difference vegetation index (GNDVI) | (R800 − R550)/(R800 + R550) | [50] |
| Optimized soil-adjusted vegetation index (OSAVI) | (1 + 0.16) × (R800 − R670)/(R800 + R670 + 0.16) | [51] |
| Enhanced vegetation index (EVI) | 2.5 × [(R800 − R670)/(R800 + 6 × R670 − 7.5 × R475 + 1)] | [52] |
| Simple ratio pigment index (SRPI) | R430/R680 | [53] |
| Photochemical reflectance index (PRI) | (R570 − R531)/(R531 + R570) | [54] |
| Plant senescing reflectance index (PSRI) | (R680-R500)/R750 | [55] |
| Carter index (CI) | R760/R695 | [56] |
| Structure insensitive pigment index (SIPI) | (R800 − R445)/(R800 − R680) | [57] |
| Ratio vegetation stress index (RVSI) | (R718 + R748)/2 − R733 | [58] |
| Vogelmann red edge index 1 (VOG1) | Sum [R734:R747]/Sum [R715:R726] | [59] |
| Vogelmann red edge index 2 (VOG2) | (R734 − R747)/(R715 + R726) | |
| Green peak height (GH) | 1 − [R500 + 0.35 × (R670 − R500)]/R560 | [21] |
| Red valley depth (RD) | 1 − R670/[R560 + 0.55 × (R760 − R560)] | |
| Water index (WI) | R900/R970 | [60] |
| Disease water stress index 4 (DSWI-4) | R550/R680 | [61] |
| Anthocyanin reflectance index (ARI) | 1/R550 − 1/R700 | [62] |
| Carotenoids reflectance index (CRI) | 1/R510 − 1/R550 | [63] |
| Categories | Structural Variables | Descriptions |
|---|---|---|
| Intensity metrics | int_P25, int_P50, int_P75, and int_P99 | 25th, 50th, 75th, and 99th percentile of return intensity |
| int_C25, int_C50, and int_C75, int_C99 | 25th, 50th, 75th, and 99th cumulative percentile of return intensity | |
| int_IQ | Interquartile range of return intensity | |
| int_mean | Mean value of return intensity | |
| int_cv | Coefficient of variance of return intensity | |
| int_kurtosis | Kurtosis of return intensity | |
| int_skewness | Skewness of return intensity | |
| Geometric metrics | elev_P25/TH, elev_P50/TH, elev_P75/TH, and elev_P99/TH | 25th, 50th, 75th, and 99th percentile of heights (normalized by tree height) |
| elev_IQ | Interquartile range of height percentile | |
| Canopy relief ratio (CRR) | mean/min/max is the average/min/max height of all points within the statistical unit. | |
| Canopy cover (CC) | nvegfirst represents the number of vegetation points from the first return, while nfirst represents the total number of points from the first return. | |
| Leaf area index (LAI) | ang represents the average scanning angle. GF represents the gap fraction. k is the extinction coefficient, ln is the natural logarithm, and n is the total number of points. | |
| Gap fraction (GF) | nground represents the number of ground points extracted with Z-values below the height threshold, while n represents the total number of points. |
| Accuracy | Object-Oriented Segmentation | Seed Point-Based PCS | CHM-Based PCS |
|---|---|---|---|
| True positive (TP) | 173 | 235 | 259 |
| False positive (FP) | 36 | 95 | 61 |
| False negative (FN) | 97 | 35 | 11 |
| Recall (re, %) | 82.78 | 71.21 | 80.94 |
| Precision (p, %) | 64.07 | 87.04 | 95.93 |
| F-score (F, %) | 72.23 | 78.33 | 87.80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Luo, Y.; Yu, R.; Ren, L.; Jiang, Q.; He, S.; Chen, X.; Yang, G. Combined Use of Spectral and Structural Features for Improved Early Detection of Pine Shoot Beetle Attacks in Yunnan Pines. Remote Sens. 2025, 17, 1109. https://doi.org/10.3390/rs17071109
Liu Y, Luo Y, Yu R, Ren L, Jiang Q, He S, Chen X, Yang G. Combined Use of Spectral and Structural Features for Improved Early Detection of Pine Shoot Beetle Attacks in Yunnan Pines. Remote Sensing. 2025; 17(7):1109. https://doi.org/10.3390/rs17071109
Chicago/Turabian StyleLiu, Yujie, Youqing Luo, Run Yu, Lili Ren, Qi Jiang, Shaoshun He, Xinqiang Chen, and Guangzhao Yang. 2025. "Combined Use of Spectral and Structural Features for Improved Early Detection of Pine Shoot Beetle Attacks in Yunnan Pines" Remote Sensing 17, no. 7: 1109. https://doi.org/10.3390/rs17071109
APA StyleLiu, Y., Luo, Y., Yu, R., Ren, L., Jiang, Q., He, S., Chen, X., & Yang, G. (2025). Combined Use of Spectral and Structural Features for Improved Early Detection of Pine Shoot Beetle Attacks in Yunnan Pines. Remote Sensing, 17(7), 1109. https://doi.org/10.3390/rs17071109