
An Extension of Ozone Profile Retrievals from TROPOMI Based on the SAO2024 Algorithm


Abstract
1. Introduction
2. Data
2.1. TROPOMI L1B Product
2.2. TROPOMI Standard Ozone Profile Product
2.3. Ozonesondes
3. Retrieval Methodology
3.1. Heritage from SAO Ozone Profile Algorithm
3.2. Optimization of TROPOMI Measurements
3.2.1. Spatial and Spectral Co-Adding
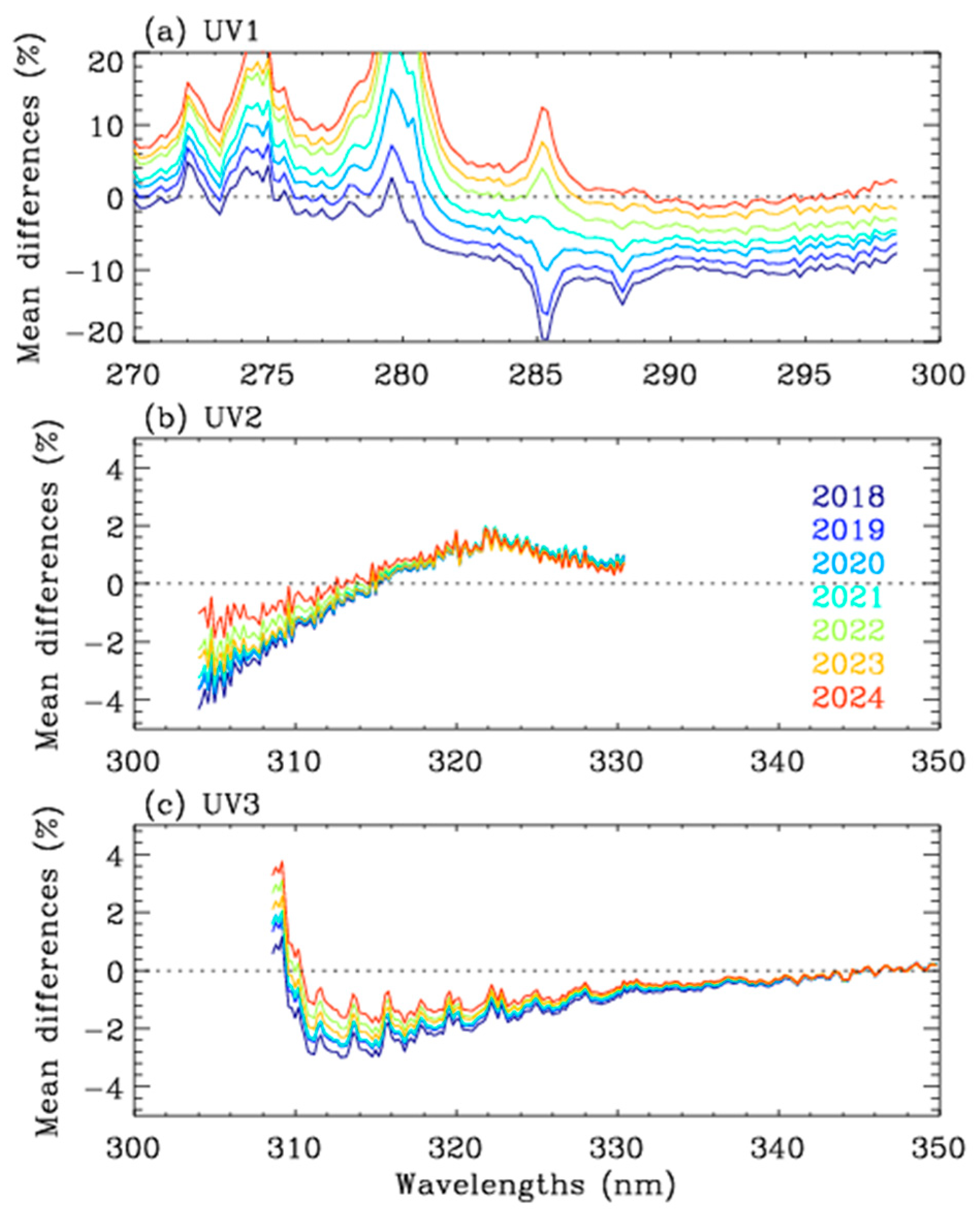
3.2.2. Irradiance Calibrations
3.2.3. Radiance Calibrations
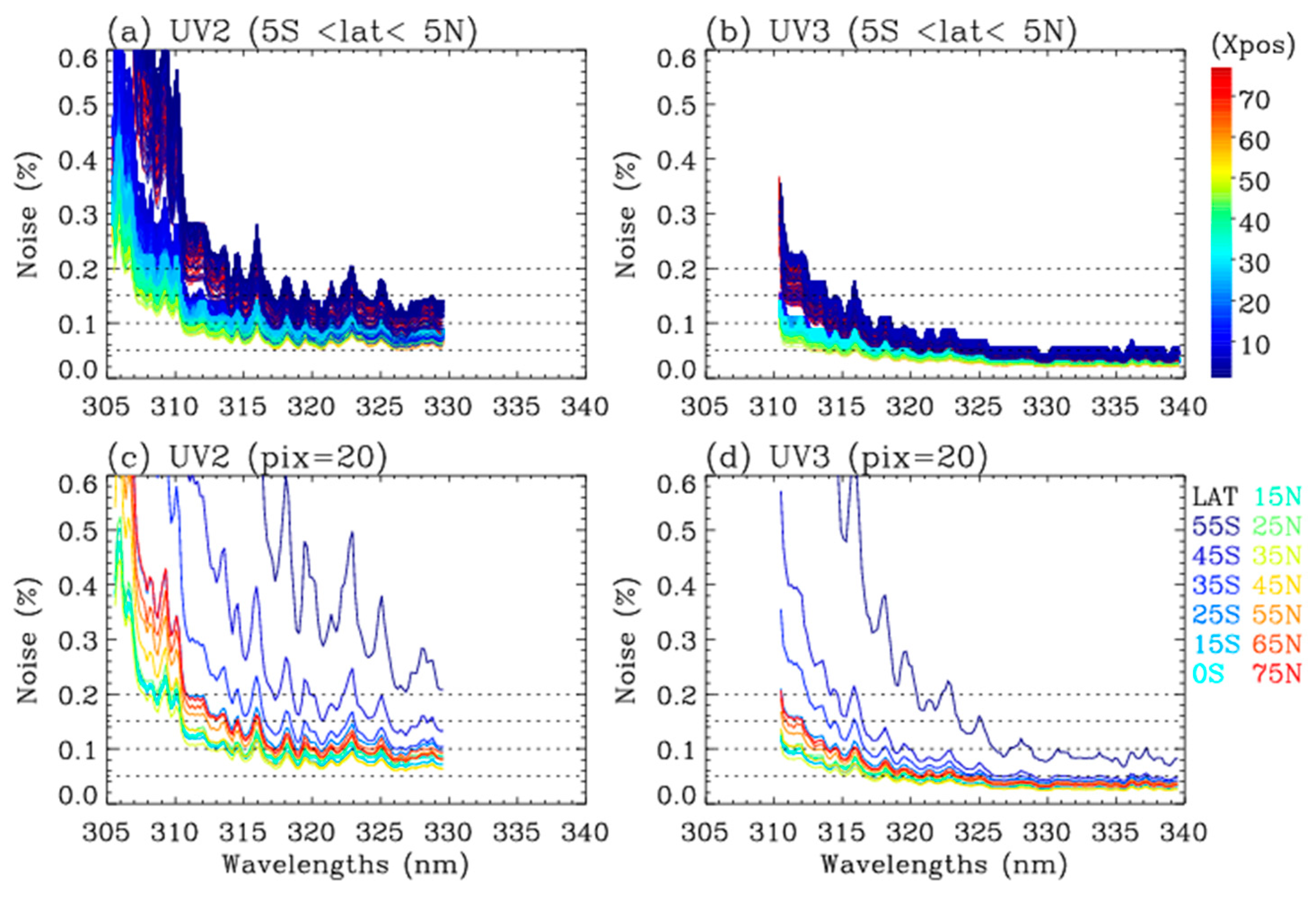
3.2.4. Measurement Error
4. Comparison of Retrieval Characteristics from UV2 and UV3
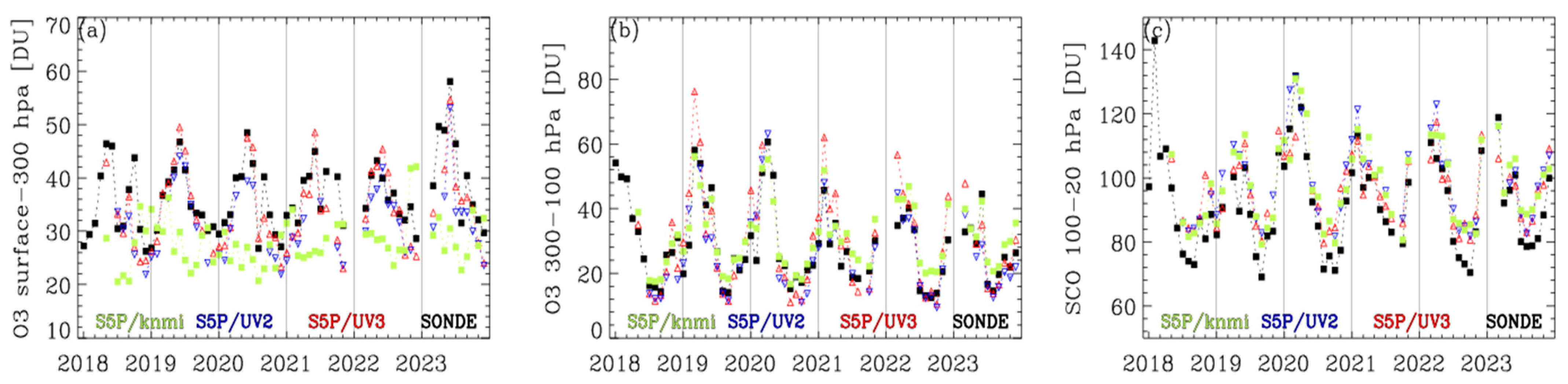
5. Comparison with Ozonesonde Measurements
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lefohn, A.S.; Malley, C.S.; Smith, L.; Wells, B.; Hazucha, M.; Simon, H.; Naik, V.; Mills, G.; Schultz, M.G.; Paoletti, E.; et al. Tropospheric ozone assessment report: Global ozone metrics for climate change, human health, and crop/ecosystem research. Elem. Sci. Anthr. 2018, 6, 27. [Google Scholar] [CrossRef]
- Mills, G.; Pleijel, H.; Malley, C.S.; Sinha, B.; Cooper, O.R.; Schultz, M.G.; Neufeld, H.S.; Simpson, D.; Sharps, K.; Feng, Z.; et al. Tropospheric Ozone Assessment Report: Present-day tropospheric ozone distribution and trends relevant to vegetation. Elem. Sci. Anthr. 2018, 6, 47. [Google Scholar] [CrossRef]
- Monks, P.S.; Archibald, A.T.; Colette, A.; Cooper, O.; Coyle, M.; Derwent, R.; Fowler, D.; Granier, C.; Law, K.S.; Mills, G.E.; et al. Tropospheric ozone and its precursors from the urban to the global scale from air quality to short-lived climate forcer. Atmos. Chem. Phys. 2015, 15, 8889–8973. [Google Scholar] [CrossRef]
- Bourgeois, I.; Peischl, J.; Neuman, J.A.; Brown, S.S.; Thompson, C.R.; Aikin, K.C.; Allen, H.M.; Angot, H.; Apel, E.C.; Baublitz, C.B.; et al. Large contribution of biomass burning emissions to ozone throughout the global remote troposphere. Proc. Natl. Acad. Sci. USA 2021, 118, e2109628118. [Google Scholar] [CrossRef] [PubMed]
- Miller, A.J. A review of satellite, observations of atmospheric ozone. Planet. Space Sci. 1989, 37, 1539–1554. [Google Scholar] [CrossRef]
- Bhartia, P.K.; Heath, D.F.; Fleig, A.F. Observation of anomalously small ozone densities in south polar stratosphere during October 1983 and 1984. In Proceedings of the Symposium on Dynamics and Remote Sensing of the Middle Atmosphere, 5th Scientific Assembly, International Association of Geomagnetism and Aeronomy, Prague, Czech Republic, 5–17 August 1985. [Google Scholar]
- Burrows, J.P.; Weber, M.; Buchwitz, M.; Rozanov, V.; Ladstätter-Weißenmayer, A.; Richter, A.; DeBeek, R.; Hoogen, R.; Bramstedt, K.; Eichmann, K.-U.; et al. The Global Ozone Monitoring Experiment (GOME): Mission Concept and First Scientific Results. J. Atmos. Sci. 1999, 56, 151–175. [Google Scholar] [CrossRef]
- van der A, R.J.; Van Oss, R.F.; Piters, A.J.M.; Fortuin, J.P.F.; Meijer, Y.J.; Kelder, H.M. Ozone profile retrieval from recalibrated Global Ozone Monitoring Experiment data. J. Geophys. Res. 2002, 107, 4239. [Google Scholar] [CrossRef]
- Hoogen, R.; Rozanov, V.V.; Burrows, J.P. Ozone profiles from GOME satellite data: Algorithm description and first validation. J. Geophys. Res. Atmos. 1999, 104, 8263–8280. [Google Scholar] [CrossRef]
- Liu, X.; Chance, K.; Sioris, C.E.; Spurr, R.J.D.; Kurosu, T.P.; Martin, R.V.; Newchurch, M.J. Ozone profile and tropospheric ozone retrievals from the Global Ozone Monitoring Experiment: Algorithm description and validation. J. Geophys. Res. 2005, 110, D20307. [Google Scholar] [CrossRef]
- Liu, X.; Chance, K.; Sioris, C.E.; Kurosu, T.P. Impact of using different ozone cross sections on ozone profile retrievals from Global Ozone Monitoring Experiment (GOME) ultraviolet measurements. Atmos. Chem. Phys. 2007, 7, 3571–3578. [Google Scholar] [CrossRef]
- Munro, R.; Siddans, R.; Reburn, W.J.; Kerridge, B.J. Direct measurement of tropospheric ozone distributions from space. Nature 1998, 392, 168–171. [Google Scholar] [CrossRef]
- Levelt, P.F.; Joiner, J.; Tamminen, J.; Veefkind, J.P.; Bhartia, P.K.; Stein Zweers, D.C.; Duncan, B.N.; Streets, D.G.; Eskes, H.; van der A, R.; et al. The Ozone Monitoring Instrument: Overview of 14 years in space. Atmos. Chem. Phys. 2018, 18, 5699–5745. [Google Scholar] [CrossRef]
- Flynn, L.; Long, C.; Wu, X.; Evans, R.; Beck, C.T.; Petropavlovskikh, I.; McConville, G.; Yu, W.; Zhang, Z.; Niu, J.; et al. Performance of the Ozone Mapping and Profiler Suite (OMPS) products. J. Geophys. Res. Atmos. 2014, 119, 6181–6195. [Google Scholar] [CrossRef]
- Pan, C.; Yan, B.; Flynn, L.; Beck, T.; Chen, J.; Huang, J. Recent Improvements to NOAA-20 Ozone Mapper Profiler Suite Nadir Profiler Sensor Data Records. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Brussels, Belgium, 11–16 July 2021; pp. 7924–7926. [Google Scholar]
- Veefkind, J.P.; Aben, I.; McMullan, K.; Förster, H.; de Vries, J.; Otter, G.; Claas, J.; Eskes, H.J.; de Haan, J.F.; Kleipool, Q.; et al. TROPOMI on the ESA Sentinel-5 Precursor: A GMES mission for global observations of the atmospheric composition for climate, air quality and ozone layer applications. Remote Sens. Environ. 2012, 120, 70–83. [Google Scholar] [CrossRef]
- De Smedt, I.; Pinardi, G.; Vigouroux, C.; Compernolle, S.; Bais, A.; Benavent, N.; Boersma, F.; Chan, K.-L.; Donner, S.; Eichmann, K.-U.; et al. Comparative assessment of TROPOMI and OMI formaldehyde observations and validation against MAX-DOAS network column measurements. Atmos. Chem. Phys. 2021, 21, 12561–12593. [Google Scholar] [CrossRef]
- Torres, O.; Jethva, H.; Ahn, C.; Jaross, G.; Loyola, D.G. TROPOMI aerosol products: Evaluation and observations of synoptic-scale carbonaceous aerosol plumes during 2018–2020. Atmos. Meas. Tech. 2020, 13, 6789–6806. [Google Scholar] [CrossRef]
- Keppens, A.; Di Pede, S.; Hubert, D.; Lambert, J.-C.; Veefkind, P.; Sneep, M.; De Haan, J.; ter Linden, M.; Leblanc, T.; Compernolle, S.; et al. 5 years of Sentinel-5P TROPOMI operational ozone profiling and geophysical validation using ozonesonde and lidar ground-based networks. Atmos. Meas. Tech. 2024, 17, 3969–3993. [Google Scholar] [CrossRef]
- An, Y.; Wang, X.; Ye, H.; Shi, H.; Wu, S.; Li, C.; Sun, E. Ozone Profile Retrieval Algorithm Based on GEOS-Chem Model in the Middle and Upper Atmosphere. Remote Sens. 2024, 16, 1335. [Google Scholar] [CrossRef]
- Mettig, N.; Weber, M.; Rozanov, A.; Arosio, C.; Burrows, J.P.; Veefkind, P.; Thompson, A.M.; Querel, R.; Leblanc, T.; Godin-Beekmann, S.; et al. Ozone profile retrieval from nadir TROPOMI measurements in the UV range. Atmos. Meas. Tech. 2021, 14, 6057–6082. [Google Scholar] [CrossRef]
- Zhao, F.; Liu, C.; Cai, Z.; Liu, X.; Bak, J.; Kim, J.; Hu, Q.; Xia, C.; Zhang, C.; Sun, Y.; et al. Ozone profile retrievals from TROPOMI: Implication for the variation of tropospheric ozone during the outbreak of COVID-19 in China. Sci. Total Environ. 2021, 764, 142886. [Google Scholar] [CrossRef] [PubMed]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding; World Scientific: Singapore, 2000. [Google Scholar]
- Tikhonov, A.N. Solution of Incorrectly Formulated Problems and the Regularization Method. Sov. Math. Dokl. 1963, 4, 1035–1038. [Google Scholar]
- Bak, J.; Liu, X.; Yang, K.; Gonzalez Abad, G.; O’Sullivan, E.; Chance, K.; Kim, C.-H. An improved OMI ozone profile research product version 2.0 with collection 4 L1b data and algorithm updates. Atmos. Meas. Tech. 2024, 17, 1891–1911. [Google Scholar] [CrossRef]
- Liu, X.; Bhartia, P.K.; Chance, K.; Spurr, R.J.D.; Kurosu, T.P. Ozone profile retrievals from the Ozone Monitoring Instrument. Atmos. Chem. Phys. 2010, 10, 2521–2537. [Google Scholar] [CrossRef]
- Kroon, M.; de Haan, J.F.; Veefkind, J.P.; Froidevaux, L.; Wang, R.; Kivi, R.; Hakkarainen, J.J. Validation of operational ozone profiles from the Ozone Monitoring Instrument. J. Geophys. Res. Atmos. 2011, 116, D18305. [Google Scholar] [CrossRef]
- Ludewig, A.; Kleipool, Q.; Bartstra, R.; Landzaat, R.; Leloux, J.; Loots, E.; Meijering, P.; van der Plas, E.; Rozemeijer, N.; Vonk, F.; et al. In-flight calibration results of the TROPOMI payload on board the Sentinel-5 Precursor satellite. Atmos. Meas. Tech. 2020, 13, 3561–3580. [Google Scholar] [CrossRef]
- de Haan, J.F.; Wang, P.; Sneep, M.; Veefkind, J.P.; Stammes, P. Introduction of the DISAMAR radiative transfer model: Determining instrument specifications and analysing methods for atmospheric retrieval (version 4.1.5). Geosci. Model Dev. 2022, 15, 7031–7050. [Google Scholar] [CrossRef]
- Labow, G.J.; Ziemke, J.R.; McPeters, R.D.; Haffner, D.P.; Bhartia, P.K. A total ozone-dependent ozone profile climatology based on ozonesondes and Aura MLS data. J. Geophys. Res. Atmos. 2015, 120, 2537–2545. [Google Scholar] [CrossRef]
- Veefkind, P.; Keppens, A.; de Haan, J. TROPOMI ATBD Ozone Profile v1.0.0. Available online: https://sentinel.esa.int/documents/247904/2476257/Sentinel-5P-TROPOMI-ATBD-Ozone-Profile.pdf (accessed on 12 December 2024).
- Bak, J.; Liu, X.; Wei, J.C.; Pan, L.L.; Chance, K.; Kim, J.H. Improvement of omi ozone profile retrievals in the upper troposphere and lower stratosphere by the use of a tropopause-based ozone profile climatology. Atmos. Meas. Tech. 2013, 6, 2239–2254. [Google Scholar] [CrossRef]
- Bak, J.; Liu, X.; Spurr, R.; Yang, K.; Nowlan, C.R.; Miller, C.C.; Abad, G.G.; Chance, K. Radiative transfer acceleration based on the principal component analysis and lookup table of corrections: Optimization and application to UV ozone profile retrievals. Atmos. Meas. Tech. 2021, 14, 2659–2672. [Google Scholar] [CrossRef]
- Loyola, D.G.; Gimeno García, S.; Lutz, R.; Argyrouli, A.; Romahn, F.; Spurr, R.J.D.; Pedergnana, M.; Doicu, A.; Molina García, V.; Schüssler, O. The operational cloud retrieval algorithms from TROPOMI on board Sentinel-5 Precursor. Atmos. Meas. Tech. 2018, 11, 409–427. [Google Scholar] [CrossRef]
- Livesey, N.J.; Read, W.G.; Wagner, P.A.; Froidevaux, L.; Santee, M.L.; Schwartz, M.J.; Lambert, A.; Millan Valle, L.F.; Pumphrey, H.C.; Manney, G.L.; et al. EOS MLS Version 5.0x Level 2 and 3 Data Quality and Description Document, Tech. Rep., Jet Propulsion Laboratory D-105336 Rev. B, 30 January 2022. Available online: https://mls.jpl.nasa.gov/eos-aura-mls/documentation.php (accessed on 31 January 2025).
- McPeters, R.D.; Labow, G.J. Climatology 2011: An MLS and sonde derived ozone climatology for satellite retrieval algorithms. J. Geophys. Res. Atmos. 2012, 117, D10303. [Google Scholar] [CrossRef]
- Jensen, A.A.; Thompson, A.M.; Schmidlin, F.J. Classification of Ascension Island and Natal ozonesondes using self-organizing maps. J. Geophys. Res. Atmos. 2012, 117, D04302. [Google Scholar] [CrossRef]
- Thompson, A.M.; Witte, J.C.; Smit, H.G.J.; Oltmans, S.J.; Johnson, B.J.; Kirchhoff, V.W.J.H.; Schmidlin, F.J. Southern Hemisphere Additional Ozonesondes (SHADOZ) 1998–2004 tropical ozone climatology: 3. Instrumentation, station-to-station variability, and evaluation with simulated flight profiles. J. Geophys. Res. Atmos. 2007, 112, D03304. [Google Scholar] [CrossRef]
- Bak, J.; Song, E.-J.; Lee, H.-J.; Liu, X.; Koo, J.-H.; Kim, J.; Jeon, W.; Kim, J.-H.; Kim, C.-H. Temporal variability of tropospheric ozone and ozone profiles in the Korean Peninsula during the East Asian summer monsoon: Insights from multiple measurements and reanalysis datasets. Atmos. Chem. Phys. 2022, 22, 14177–14187. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band ID | 1 | 2 | 3 |
|---|---|---|---|
| Spectral range (nm) | 267–300 | 300–332 | 305–400 |
| Spectral resolution (nm) | 0.45–0.5 | 0.45–0.65 | |
| Spectral sampling (nm) | 0.065 | 0.195 | |
| Along-track ground pixel size (km) + | 5.5 | 5.5 | 5.5 |
| Across-track ground pixel size (km) @ | 28···60 | 3.5···15 | 3.5···15 |
| Binning factor * | 4···16 | 1···2 | 1···2 |
| Spatial dimension # | 77 | 448 | 450 |
| Minimal Signal-to-noise ratio | 50 | 50–600 | 100–1200 |
| Station | Country | Lon, Lat (°) | Elevation (m) | Launch time (LT) # | Provider |
|---|---|---|---|---|---|
| Ascension Island | UK | 14.22W, 7.56S | 85 | 12:30 | SHADOZ 1 |
| King’s Park | Hong Kong | 114.17E, 22.31N | 66 | 13:30 | WOUDC 2 |
| Pohang | South Korea | 129.37E, 36.03N | 2.5 | 14:00 | KMA 3 |
| Tsukuba | Japan | 140.13E, 36.06N | 31 | 14:30 | WOUDC |
| Lindenberg | Germany | 14.1E, 52.2N | 112 | 12:00 | WOUDC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bak, J.; Liu, X.; Abad, G.G.; Yang, K. An Extension of Ozone Profile Retrievals from TROPOMI Based on the SAO2024 Algorithm. Remote Sens. 2025, 17, 779. https://doi.org/10.3390/rs17050779
Bak J, Liu X, Abad GG, Yang K. An Extension of Ozone Profile Retrievals from TROPOMI Based on the SAO2024 Algorithm. Remote Sensing. 2025; 17(5):779. https://doi.org/10.3390/rs17050779
Chicago/Turabian StyleBak, Juseon, Xiong Liu, Gonzalo González Abad, and Kai Yang. 2025. "An Extension of Ozone Profile Retrievals from TROPOMI Based on the SAO2024 Algorithm" Remote Sensing 17, no. 5: 779. https://doi.org/10.3390/rs17050779
APA StyleBak, J., Liu, X., Abad, G. G., & Yang, K. (2025). An Extension of Ozone Profile Retrievals from TROPOMI Based on the SAO2024 Algorithm. Remote Sensing, 17(5), 779. https://doi.org/10.3390/rs17050779