
Comparative Analysis of Prior and Posterior Integrity Monitoring Techniques for Enhanced Global Navigation Satellite System Positioning Continuity and Accuracy



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
2.1. Prior Integrity Monitoring
2.2. Posterior Integrity Monitoring
3. Impacts on Positioning Continuity and Accuracy
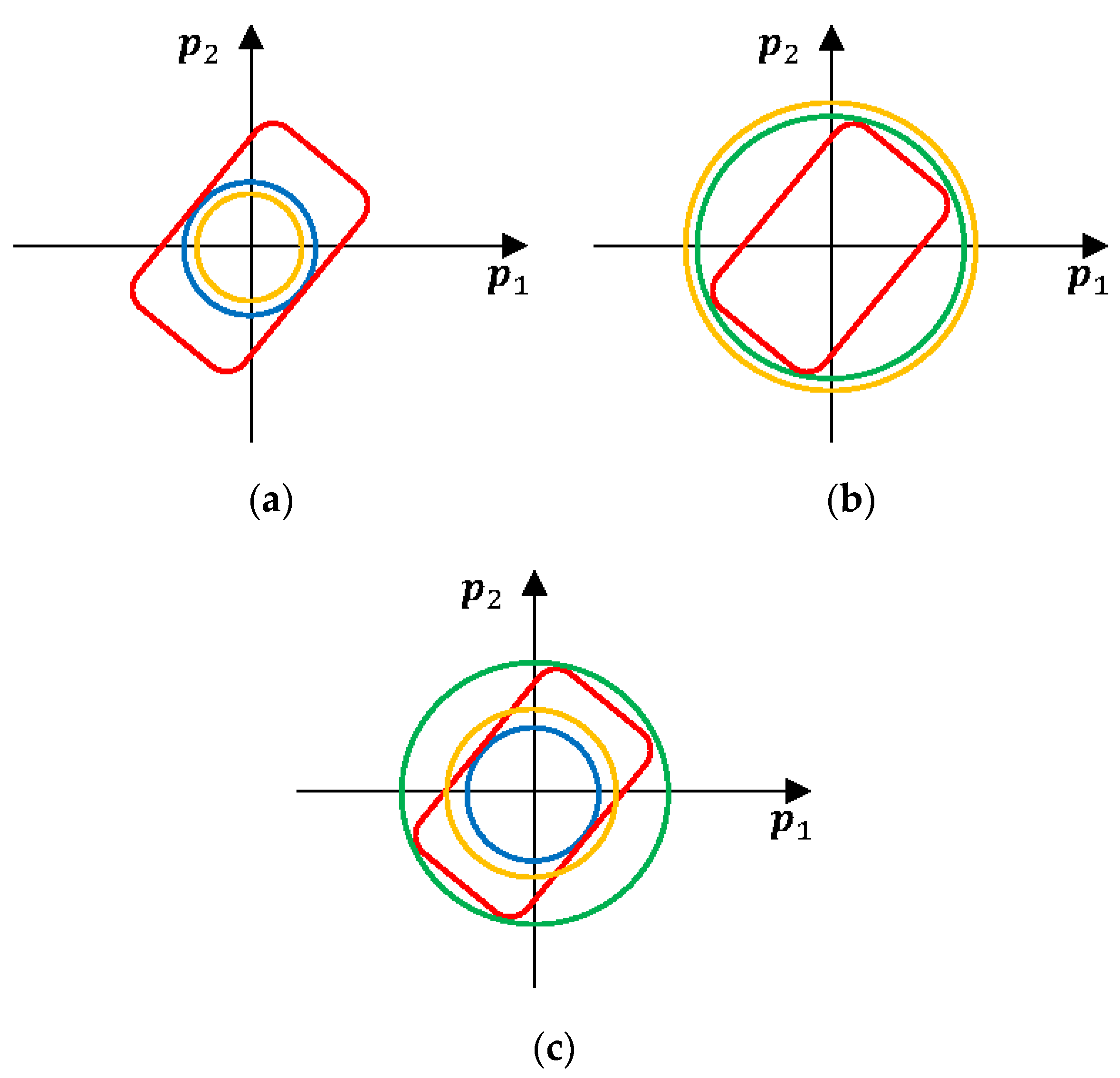
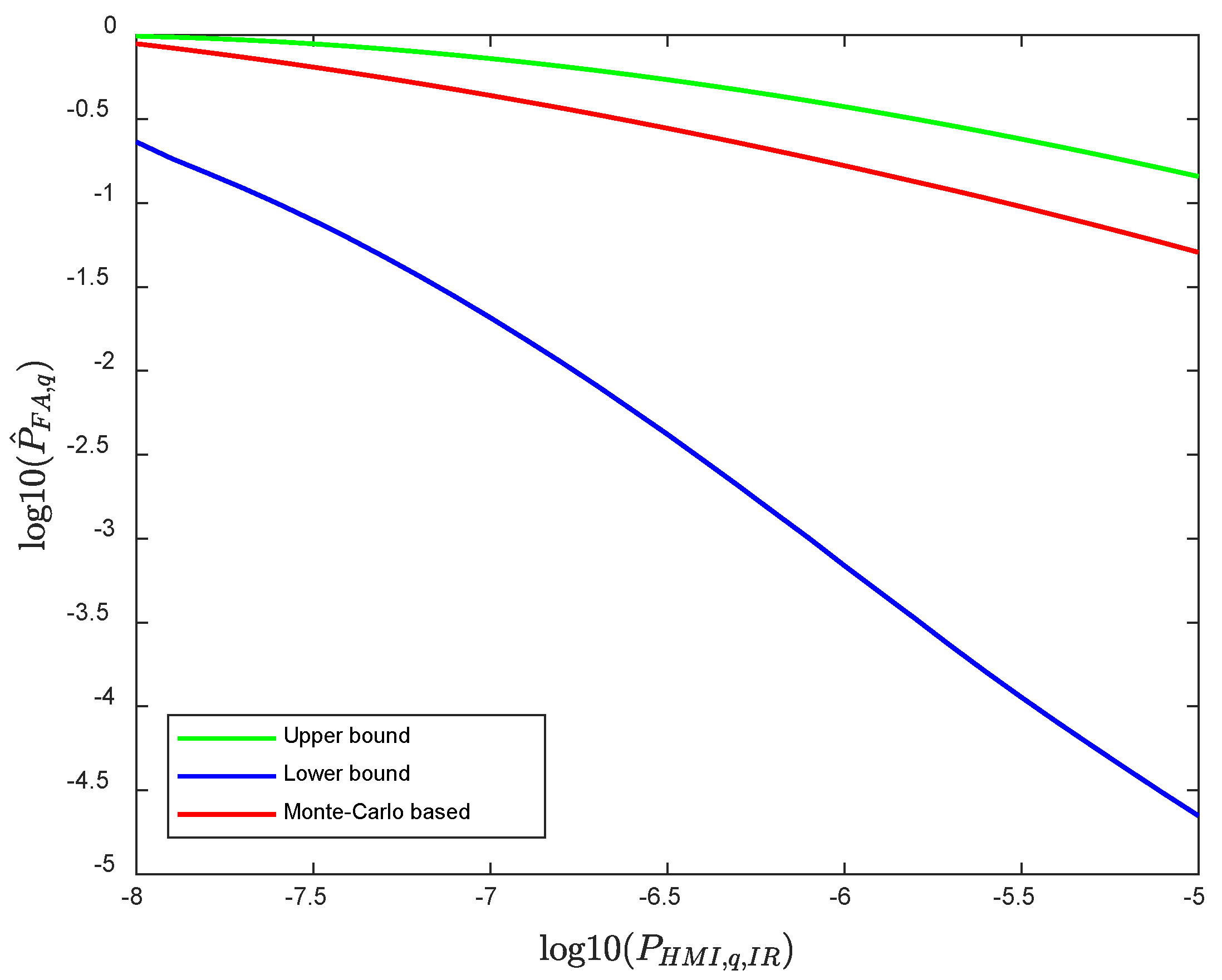
3.1. Impact on Continuity
- (a)
- (b)
- (c)
- Otherwise, the relationship between and is unclear. The continuity risk under the fault-free scenario can be evaluated through Monte Carlo simulation.
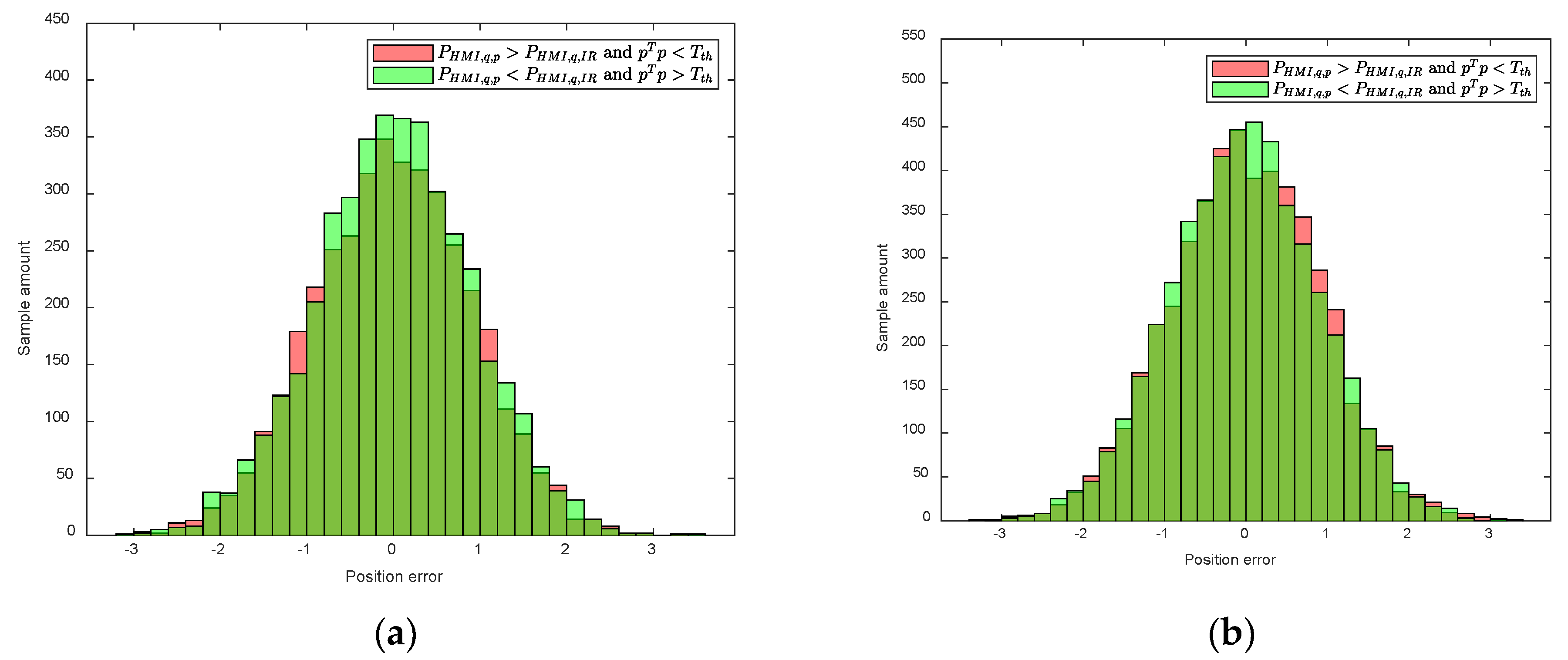
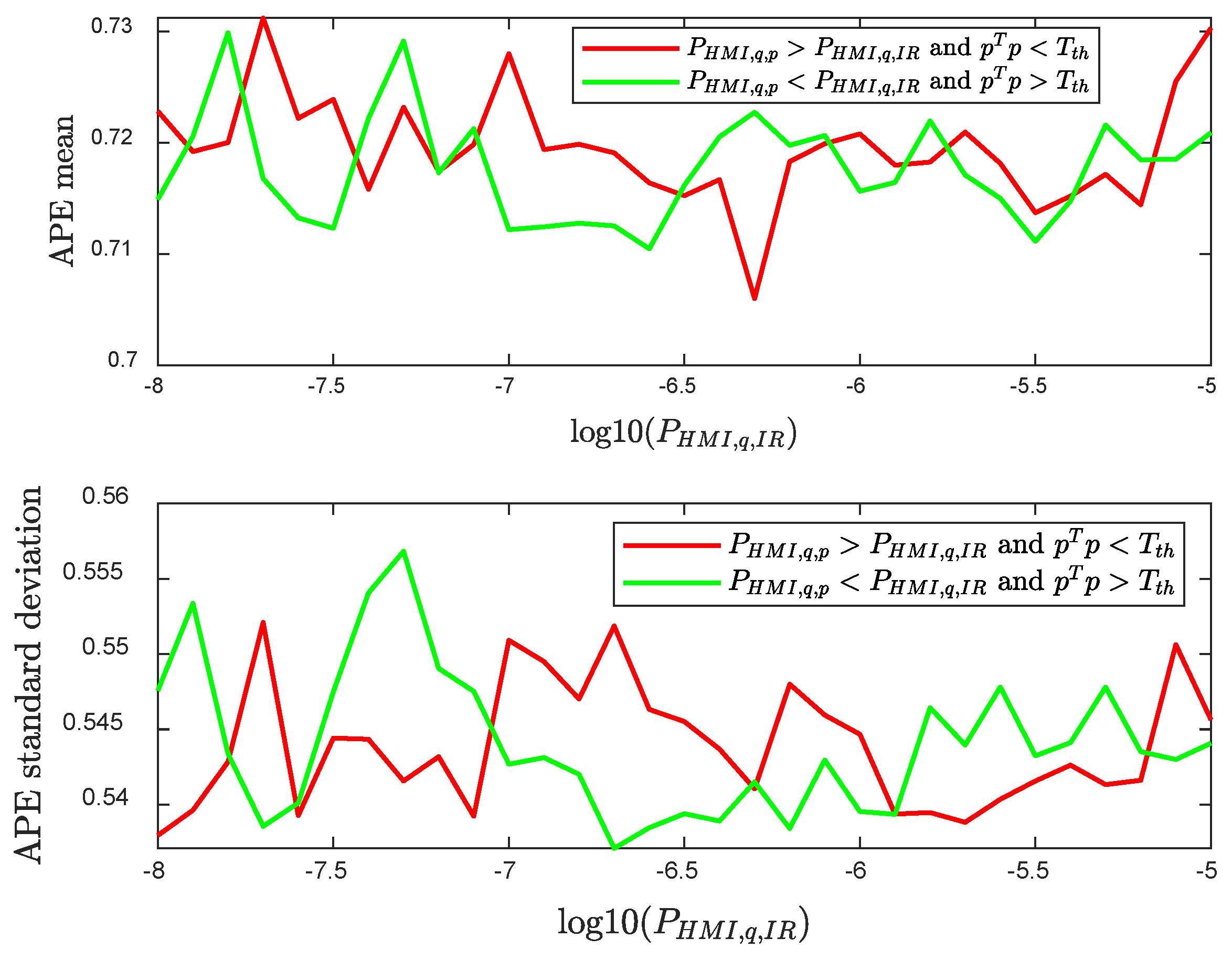
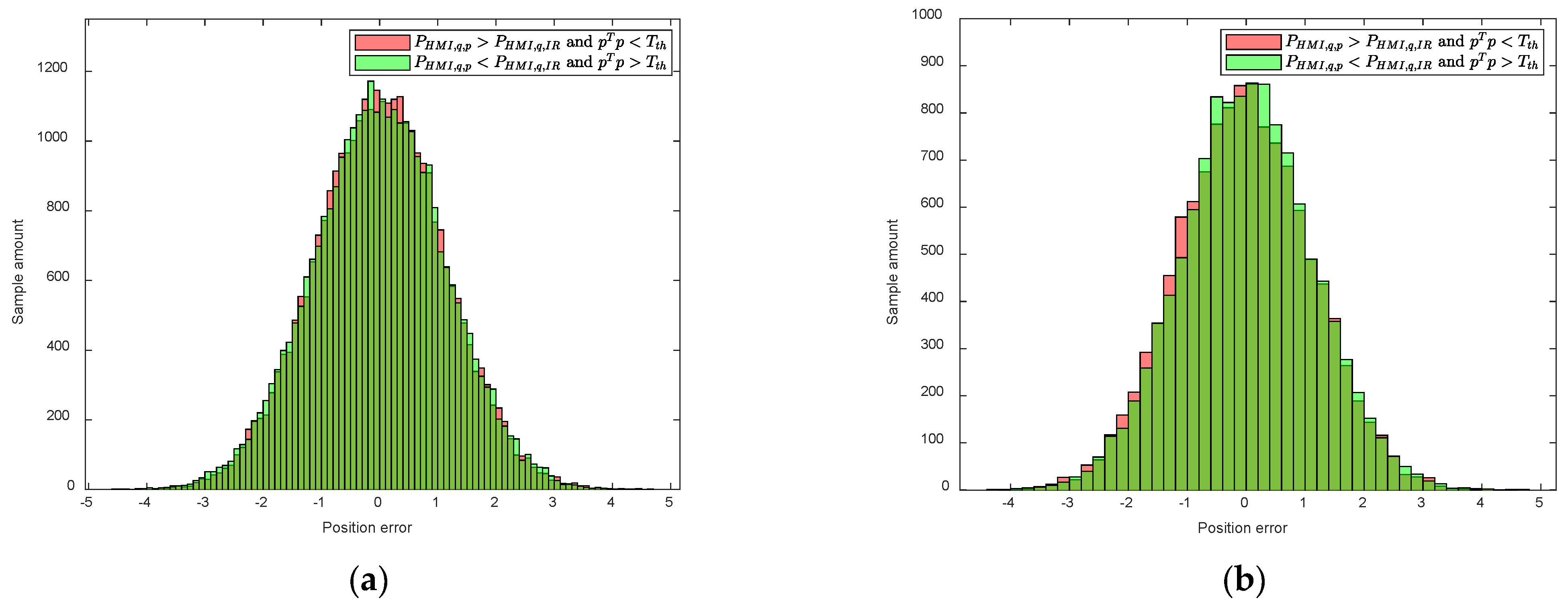
3.2. Impact on Accuracy
4. Simulations and Method Validation
4.1. Case 1
4.2. Case 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baldoni, S.; Battisti, F.; Brizzi, M.; Neri, A. GNSS-Imaging Data Fusion for Integrity Enhancement in Autonomous Vehicles. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4690–4704. [Google Scholar] [CrossRef]
- Fusini, L.; Fossen, T.I.; Johansen, T.A. Nonlinear observers for GNSS and camera-aided inertial navigation of a fixed-wing UAV. IEEE Trans. Control Syst. Technol. 2017, 26, 1884–1891. [Google Scholar] [CrossRef]
- Zhang, X.; Tao, X.; Zhu, F.; Shi, X.; Wang, F. Quality assessment of GNSS observations from an Android N smartphone and positioning performance analysis using time-differenced filtering approach. GPS Solut. 2018, 22, 70. [Google Scholar] [CrossRef]
- Elsayed, H.; El-Mowafy, A.; Wang, K. A new method for fault identification in real-time integrity monitoring of autonomous vehicles positioning using PPP-RTK. GPS Solut. 2024, 28, 32. [Google Scholar] [CrossRef]
- Pervan, B.; Pullen, S.P.; Christie, J.R. A multiple hypothesis approach to satellite navigation integrity. Navigation 1998, 45, 61–71. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, X.; Zhai, Y.; Zheng, L.; Liu, B. Enhancing navigation integrity for Urban Air Mobility with redundant inertial sensors. Aerosp. Sci. Technol. 2022, 126, 107631. [Google Scholar] [CrossRef]
- Report on the Performance and Level of Integrity for Safety and Liability Critical Multi-Applications; European GNSS Agency: Madrid, Spain, 2015.
- Gao, Y.; Jiang, Y.; Gao, Y.; Huang, G. A linear Kalman filter-based integrity monitoring considering colored measurement noise. GPS Solut. 2021, 25, 59. [Google Scholar] [CrossRef]
- Blanch, J.; Walker, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Kropp, V. Baseline advanced RAIM user algorithm and possible improvements. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 713–732. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Milner, C.; Joerger, M.; Pervan, B.; Bouvet, D. Baseline advanced RAIM user algorithm: Proposed updates. In Proceedings of the 2022 International Technical Meeting of The Institute of Navigation, Long Beach, CA, USA, 25–27 January 2022; pp. 229–251. [Google Scholar]
- Feng, S.; Ochieng, W.Y.; Walsh, D.; Ioannides, R. A measurement domain receiver autonomous integrity monitoring algorithm. GPS Solut. 2006, 10, 85–96. [Google Scholar] [CrossRef]
- Chan, F.C.; Joerger, M.; Khanafseh, S.; Pervan, B. Bayesian fault-tolerant position estimator and integrity risk bound for GNSS navigation. J. Navig. 2014, 67, 753–775. [Google Scholar] [CrossRef]
- Huang, G.; Xu, C.; Zhao, J.; Song, D. Bayesian fault-tolerant protection level for multi-constellation navigation from integrity perspective. Aerosp. Sci. Technol. 2022, 130, 107954. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, X.; Zhai, Y.; Wang, H. Bayesian Upper Bound on GNSS Posterior Integrity Risk. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 7945–7961. [Google Scholar] [CrossRef]
- Feng, S.; Ochieng, W.; Samson, J.; Tossaint, M.; Jofre, M. Integrity monitoring for carrier phase ambiguities. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS position integrity in urban environments: A review of literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef]
- Wang, J.; Ober, P.B. On the Availability of Fault Detection and Exclusion in GNSS Receiver Autonomous Integrity Monitoring. J. Navig. 2009, 62, 251–261. [Google Scholar] [CrossRef]
- Yang, L.; Wang, J.; Knight, N.L.; Shen, Y. Outlier separability analysis with a multiple alternative hypotheses test. J. Geod. 2013, 87, 591–604. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. RAIM with optimal integrity and continuity allocations under multiple failures. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1235–1247. [Google Scholar] [CrossRef]
- Loh, R.; Fernow, J.P. Integrity concepts for a GPS wide-area augmentation system (WAAS). In Proceedings of the 1994 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 24–26 January 1994; pp. 127–135. [Google Scholar]
- Li, L.; Li, Z.; Yuan, H.; Wang, L.; Hou, Y. Integrity monitoring-based ratio test for GNSS integer ambiguity validation. GPS Solut. 2016, 20, 573–585. [Google Scholar] [CrossRef]
- Zhai, Y. Ensuring Navigation Integrity and Continuity Using Multi-Constellation GNSS. Ph.D. Thesis, Illinois Institute of Technology, Chicago, IL, USA, 2018. [Google Scholar]
- Joerger, M.; Pervan, B. Fault detection and exclusion using solution separation and Chi-squared ARAIM. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 726–742. [Google Scholar] [CrossRef]
- El-Mowafy, A. On detection of observation faults in the observation and position domains for positioning of intelligent transport systems. J. Geod. 2019, 93, 2109–2122. [Google Scholar] [CrossRef]
- Sturza, M.A. Navigation system integrity monitoring using redundant measurements. Navigation 1988, 35, 483–501. [Google Scholar] [CrossRef]
- Yun, H.; Kee, C. Multiple-hypothesis RAIM algorithm with an RRAIM concept. Aircr. Eng. Aerosp. Technol. 2013, 86, 26–32. [Google Scholar] [CrossRef]
- Liu, B.; Gao, Y.; Gao, Y.; Wang, S. HPL calculation improvement for Chi-squared residual-based ARAIM. GPS Solut. 2022, 26, 45. [Google Scholar] [CrossRef]
- Pervan, B. Navigation Integrity for Aircraft Precision Landing Using the Global Positioning System. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1996. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Liu, B.; Gao, Y.; Huang, G.; Zhang, Q. Comparative Analysis of Prior and Posterior Integrity Monitoring Techniques for Enhanced Global Navigation Satellite System Positioning Continuity and Accuracy. Remote Sens. 2025, 17, 723. https://doi.org/10.3390/rs17040723
Gao Y, Liu B, Gao Y, Huang G, Zhang Q. Comparative Analysis of Prior and Posterior Integrity Monitoring Techniques for Enhanced Global Navigation Satellite System Positioning Continuity and Accuracy. Remote Sensing. 2025; 17(4):723. https://doi.org/10.3390/rs17040723
Chicago/Turabian StyleGao, Yuting, Baoyu Liu, Yang Gao, Guanwen Huang, and Qin Zhang. 2025. "Comparative Analysis of Prior and Posterior Integrity Monitoring Techniques for Enhanced Global Navigation Satellite System Positioning Continuity and Accuracy" Remote Sensing 17, no. 4: 723. https://doi.org/10.3390/rs17040723
APA StyleGao, Y., Liu, B., Gao, Y., Huang, G., & Zhang, Q. (2025). Comparative Analysis of Prior and Posterior Integrity Monitoring Techniques for Enhanced Global Navigation Satellite System Positioning Continuity and Accuracy. Remote Sensing, 17(4), 723. https://doi.org/10.3390/rs17040723