
Study of Antarctic Sea Ice Based on Shipborne Camera Images and Deep Learning Method

Abstract
1. Introduction
2. Deep-Learning-Based Methods for Extracting Sea Ice Parameters
2.1. Segmentation Method of SIC Based on Ice-Deeplab Model
2.2. Segmentation Method of SIT Based on U-Net Model
2.3. The Route of the 39th Antarctic Scientific Cruise
3. Results and Discussion
3.1. Results and Analysis of SIC Extraction
3.1.1. Temporal Distribution of SIC
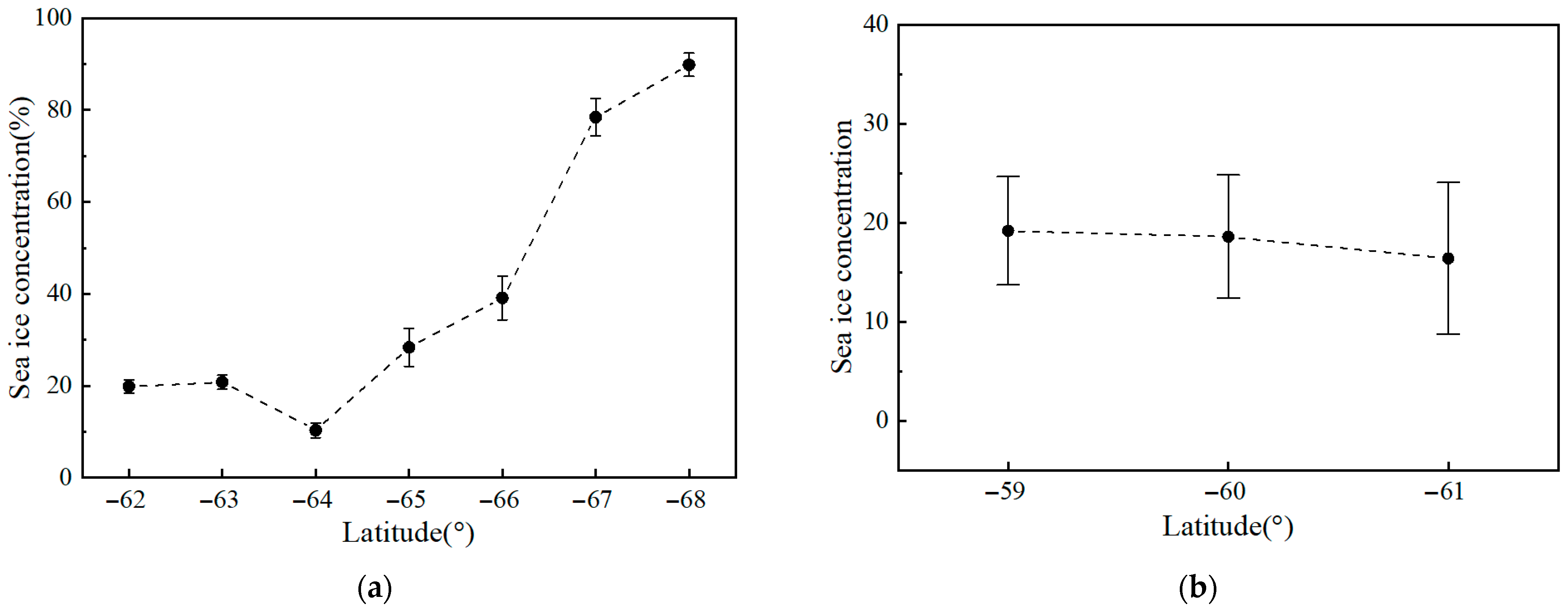
3.1.2. Spatial Distribution of SIC
3.1.3. Statistical Properties of SIC
3.2. Results and Analysis of SIT Extraction
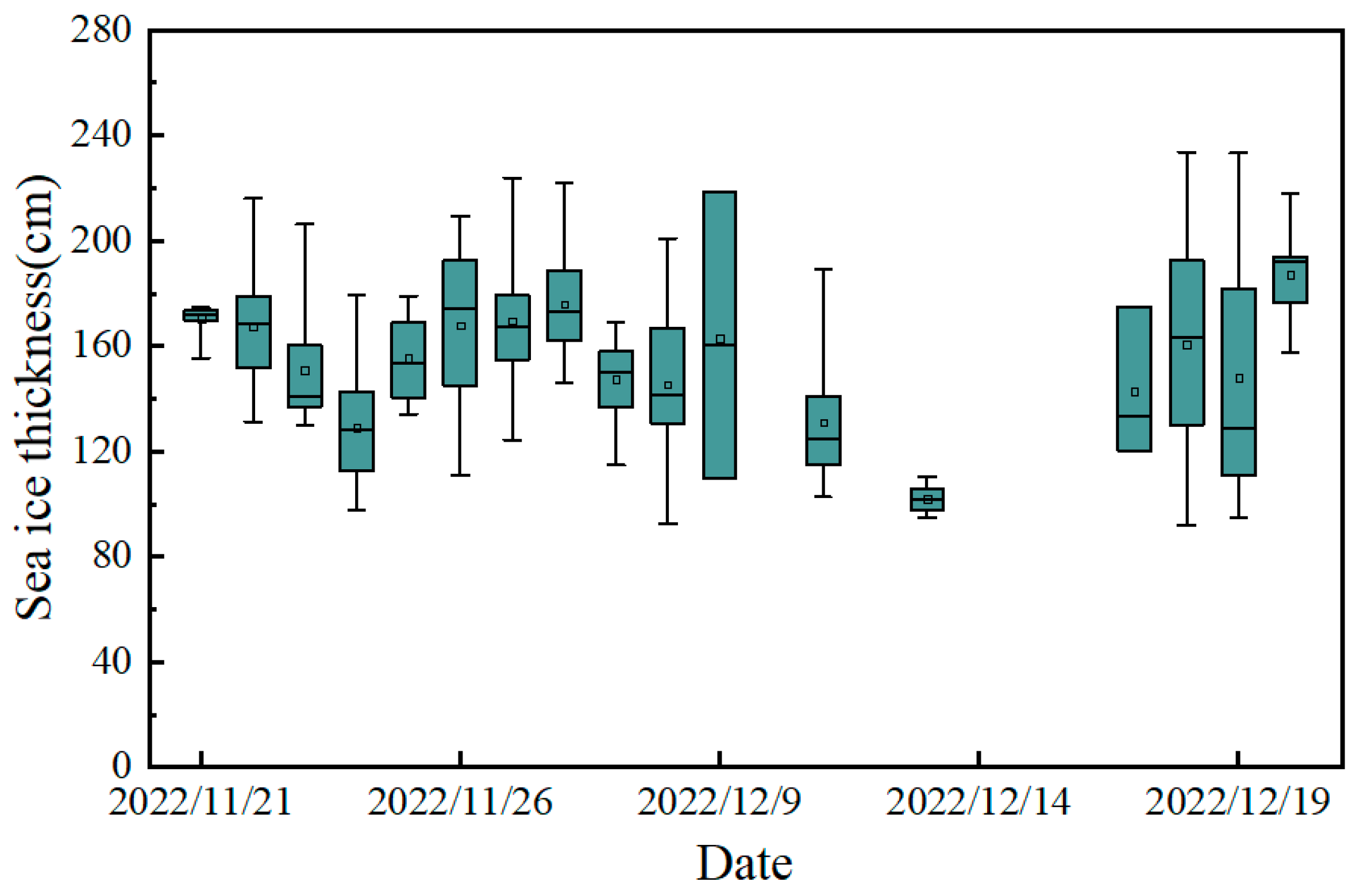
3.2.1. Temporal Distribution of SIT
3.2.2. Spatial Distribution of SIT
3.2.3. Statistical Properties of SIT
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CMEMS | The Copernicus Marine Environment Monitoring Service |
| SIC | Sea ice concentration |
| SIT | Sea ice thickness |
| SAR | Synthetic Aperture Radar |
| CNN | Convolutional Neural Network |
| DCNN | Deep Convolutional Neural Network |
| CRF | Conditional Random Fields |
| UAV | Unmanned Aerial Vehicle |
| CBAM | Convolutional Block Attention Module |
| ASPP | Atrous Spatial Pyramid Pooling |
| IPM | Inverse Perspective Mapping |
References
- Cai, Q.; Wang, J.; Beletsky, D.; Overland, J.; Ikeda, M.; Wan, L. Accelerated decline of summer Arctic sea ice during 1850–2017 and the amplified Arctic warming during the recent decades. Environ. Res. Lett. 2021, 16, 034015. [Google Scholar] [CrossRef]
- Sun, X.; Lv, T.; Sun, Q.; Ding, Z.; Shen, H.; Gao, Y.; He, Y.; Fu, M.; Li, C. Analysis of Spatiotemporal Variations and Influencing Factors of Sea Ice Extent in the Arctic and Antarctic. Remote Sens. 2023, 15, 5563. [Google Scholar] [CrossRef]
- Copernicus Marine Service. Copernicus Marine Service Website. 2023. Available online: https://climate.copernicus.eu/climate-indicators/sea-ice#c6146155-6091-4dff-b07d-f1562e6b2989 (accessed on 30 July 2025).
- Sahoo, S.K.; Momin, I.M.; George, J.P.; Prasad, V.S. Variability of sea ice concentration over Antarctica during recent decade. J. Earth Syst. Sci. 2025, 134, 1–13. [Google Scholar] [CrossRef]
- Deng, L.J.; Jin, B.W.; Quan, M.Y.; Wang, A.M.; Fan, W.J.; Wang, H. Analysis of changes in Arctic sea ice and its influencing factors during 1979–2022. Mar. Inf. Technol. Appl. 2024, 39, 8–16. (In Chinese) [Google Scholar]
- Parkinson, C.L.; DiGirolamo, N.E. Sea ice extents continue to set new records: Arctic, Antarctic, and global results. RSE 2021, 267, 112753. [Google Scholar] [CrossRef]
- Maksym, T. Arctic and Antarctic sea ice change: Contrasts, commonalities, and causes. Annu. Rev. Mar. Sci. 2019, 11, 187–213. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Q.; Yu, L.; Song, M.; Luo, H.; Shi, Q.; Li, X.; Min, C.; Liu, J. A review on Antarctic sea ice change and its climate effects. Acta Oceanol. Sin. 2021, 43, 11–22. [Google Scholar] [CrossRef]
- Willis, M.D.; Lannuzel, D.; Else, B.; Angot, H.; Campbell, K.; Crabeck, O.; Delille, B.; Hayashida, H.; Lizotte, M.; Loose, B.; et al. Polar oceans and sea ice in a changing climate. Elementa 2023, 11, 00056. [Google Scholar] [CrossRef]
- Kusahara, K.; Tatebe, H.; Hajima, T.; Saito, F.; Kawamiya, M. Antarctic Sea Ice Holds the Fate of Antarctic Ice-Shelf Basal Melting in a Warming Climate. J. Clim. 2023, 36, 713–743. [Google Scholar] [CrossRef]
- Fraser, A.D.; Wongpan, P.; Langhorne, P.J.; Klekociu, A.R.; Kusahara, K.; Lannuzel, D.; Massom, R.A.; Meiners, K.M.; Swadling, K.M.; Atwater, D.P.; et al. Antarctic Landfast Sea Ice: A Review of Its Physics. Rev. Geophys. 2023, 61, e2022RG000770. [Google Scholar] [CrossRef]
- Eayrs, C.; Li, X.C.; Raphael, M.N.; Holland, D.M. Rapid decline in Antarctic sea ice in recent years hints at future change. Nat. Geosci. 2021, 14, 460–464. [Google Scholar] [CrossRef]
- Tewari, K.; Mishra, S.K.; Salunke, P.; Ozawa, H.; Dewan, A. Potential effects of the projected Antarctic sea-ice loss on the climate system. Clim Dyn. 2023, 60, 589–601. [Google Scholar] [CrossRef]
- Ren, Z.; Zha, E.; Long, H.; Liu, W. Ground penetrating radar for detecting ice cracks and crevasses in Chinese national Antarctic research expedition. Prog. Geophys. 2017, 32, 898–901. [Google Scholar] [CrossRef]
- Huang, L.; Li, Z.; Ryan, C.; Ringsberg, J.; Pena, B.; Li, M.; Ding, L.; Thomas, G. Ship resistance when operating in floating ice floes: Derivation, validation, and application of an empirical equation. Mar. Struct. 2021, 79, 103057. [Google Scholar] [CrossRef]
- Zhang, X.; Yu, B.; Yang, D.; Liu, L.; Ji, S. Influence of ice floe size on ice resistance of ship hull in broken ice field based on discrete element analysis. Chin. J. Comput. Mech. 2024, 41, 915–920. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Remote Sensing Using GNSS-R: A Review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, C.Y.; Liu, X.Q.; Chen, Y.; Zhang, Y.J. Research advances in remote sensing monitoring of sea ice in the Bohai sea. Earth Sci. Inform. 2021, 14, 1729–1743. [Google Scholar] [CrossRef]
- MacGregor, J.A.; Boisvert, L.N.; Medley, B.; Petty, A.A.; Harbeck, J.P.; Bell, R.E.; Blair, J.B.; Blanchard-Wrigglesworth, E.; Buckley, E.M.; Christoffersen, M.S.; et al. The Scientific Legacy of NASA’s Operation IceBridge. Rev. Geophys. 2021, 59, 2. [Google Scholar] [CrossRef]
- Haas, C. Evaluation of ship-based electromagnetic-inductive thickness measurements of summer sea-ice in the Bellingshausen and Amundsen Seas, Antarctica. Cold Reg. Sci. Technol. 1998, 27, 1–16. [Google Scholar] [CrossRef]
- Uto, S.; Toyota, T.; Shimoda, H.; Tateyama, K.; Shirasawa, K. Ship-borne electromagnetic induction Sounding of Sea-ice thickness in the Southern Sea of Okhotsk. Ann. Glaciol. 2006, 44, 253–260. [Google Scholar] [CrossRef]
- Zhou, Y.; Gong, C.L.; Hu, Y.; Meng, P.; Ma, W.W. Automatic identification and tracking the Arctic sea ice based on sequential images of FY-3A satellite. In Proceedings of the 5th International Symposium on Photoelectronic Detection and Imaging, Beijing, China, 25–27 June 2013; pp. 418–427. [Google Scholar] [CrossRef]
- An, J.B.; Shuai, L. A BP neural network model for the sea ice recognition using SAR image. In Proceedings of the International Symposium of Remote Sensing and Space Technology for Multidisciplinary Research and Applications, Beijing, China, 19–24 May 2006; pp. 1–8. [Google Scholar] [CrossRef]
- Su, H.; Wang, Y.; Xiao, J.; Yan, X.H. Classification of MODIS images combining surface temperature and texture features using the Support Vector Machine method for estimation of the extent of sea ice in the frozen Bohai Bay, China. Int. J. Remote Sens. 2015, 36, 2734–2750. [Google Scholar] [CrossRef]
- Zhang, M.; Lu, X.; Zhang, X.; Zhang, T.; Wu, L.; Wang, J.; Zhang, X. Research on SVM sea ice classification based on texture features. Acta Oceanol. Sin. 2018, 40, 149–156. [Google Scholar] [CrossRef]
- Zhang, N.; Wu, Y.S.; Zhang, Q.H. Detection of sea ice in sediment laden water using MODIS in the Bohai Sea: A CART decision tree method. Int. J. Remote Sens. 2015, 36, 1661–1674. [Google Scholar] [CrossRef]
- Zakhvatkina, N.; Smirnov, V.; Bychkova, I. Satellite SAR data-based sea ice classification: An overview. Geosciences 2019, 9, 152. [Google Scholar] [CrossRef]
- Boulze, H.; Korosov, A.; Brajard, J. Classification of Sea Ice Types in Sentinel-1 SAR Data Using Convolutional Neural Networks. Remote Sens. 2020, 12, 2165. [Google Scholar] [CrossRef]
- Han, Y.; Liu, Y.; Hong, Z.; Zhang, Y.; Yang, S.; Wang, J. Sea Ice Image Classification Based on Heterogeneous Data Fusion and Deep Learning. Remote Sens. 2021, 13, 592. [Google Scholar] [CrossRef]
- Khaleghian, S.; Ullah, H.; Kræmer, T.; Hughes, N.; Eltoft, T.; Marinoni, A. Sea Ice Classification of SAR Imagery Based on Convolution Neural Networks. Remote Sens. 2021, 13, 1734. [Google Scholar] [CrossRef]
- Xu, G.B.; Zhao, G.Y.; Yin, L.; Yin, Y.X.; Shen, Y.L. A CNN-based Edge Detection Algorithm for Remote Sensing Image. In Proceedings of the 20th Chinese Control and Decision Conference, Yantai, China, 2–4 July 2008; pp. 2558–2561. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany; pp. 234–241. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Nagi, A.S.; Kumar, D.; Sola, D.; Scott, K.A. RUF: Effective Sea Ice Floe Segmentation Using End-to-End RES-UNET-CRF with Dual Loss. Remote Sens. 2021, 13, 2460. [Google Scholar] [CrossRef]
- Mei, H.; Lu, P.; Wang, Q.K.; Cao, X.W.; Li, Z.J. Study of the Spatiotemporal Variations of Summer Sea Ice Thickness in the Pacific Arctic Sector Based on Shipside Images. Chin. J. Polar Res. 2021, 33, 37–48. [Google Scholar] [CrossRef]
- Dowden, B.; De Silva, O.; Huang, W.M.; Oldford, D. Sea Ice Classification via Deep Neural Network Semantic Segmentation. IEEE Sens. J. 2021, 21, 11879–11888. [Google Scholar] [CrossRef]
- Zhang, C.Q.; Chen, X.D.; Ji, S.Y. Semantic image segmentation for sea ice parameters recognition using deep convolutional neural networks. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102885. [Google Scholar] [CrossRef]
- Alsharay, N.M.; Chen, Y.Z.; Dobre, O.A.; Silva, O.D. Improved Sea-Ice Identification Using Semantic Segmentation With Raindrop Removal. IEEE Access 2022, 10, 21599–21607. [Google Scholar] [CrossRef]
- Lin, J.T.; Peng, J.W. Adaptive inverse perspective mapping transformation method for ballasted railway based on differential edge detection and improved perspective mapping model. Digit. Signal Process. 2023, 135, 103944. [Google Scholar] [CrossRef]
- Huang, Y.P.; Li, Y.W.; Hu, X.; Ci, W.Y. Lane Detection Based on Inverse Perspective Transformation and Kalman Filter. KSII Trans. Internet Inf. Syst. 2018, 12, 643–661. [Google Scholar] [CrossRef]
- Lu, P.; Li, Z.J. A Method of Obtaining Ice Concentration and Floe Size From Shipboard Oblique Sea Ice Images. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2771–2780. [Google Scholar] [CrossRef]
- Wang, Q.K.; Li, Z.J.; Lu, P.; Lei, R.B.; Cheng, B. 2014 summer Arctic sea ice thickness and concentration from shipborne observations. Int. J. Digit. Earth 2019, 12, 931–947. [Google Scholar] [CrossRef]
- Liu, D.N.; Jiang, S.Q.; Liu, G.M.; Xiang, H.H.; Liu, Z.G. Detection and Control of Surface Scar of Aircraft Rivet Based on Image Processing. In Proceedings of the Conference on Control and Its Applications (CT), Chengdu, China, 19–21 June 2019; pp. 91–97. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | IoU (%) | MioU (%) | MPA (%) | ||
|---|---|---|---|---|---|
| Ice | Ocean | Sky | |||
| PSPNet | 74.4 | 89.7 | 98.4 | 87.5 | 93.6 |
| U-Net | 77.0 | 90.2 | 98.5 | 88.6 | 94.2 |
| Ice-Deeplab | 80.9 | 92.5 | 98.7 | 90.7 | 95.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Guo, S.; Chen, Q.; Chen, X.; Ji, S. Study of Antarctic Sea Ice Based on Shipborne Camera Images and Deep Learning Method. Remote Sens. 2025, 17, 2685. https://doi.org/10.3390/rs17152685
Chen X, Guo S, Chen Q, Chen X, Ji S. Study of Antarctic Sea Ice Based on Shipborne Camera Images and Deep Learning Method. Remote Sensing. 2025; 17(15):2685. https://doi.org/10.3390/rs17152685
Chicago/Turabian StyleChen, Xiaodong, Shaoping Guo, Qiguang Chen, Xiaodong Chen, and Shunying Ji. 2025. "Study of Antarctic Sea Ice Based on Shipborne Camera Images and Deep Learning Method" Remote Sensing 17, no. 15: 2685. https://doi.org/10.3390/rs17152685
APA StyleChen, X., Guo, S., Chen, Q., Chen, X., & Ji, S. (2025). Study of Antarctic Sea Ice Based on Shipborne Camera Images and Deep Learning Method. Remote Sensing, 17(15), 2685. https://doi.org/10.3390/rs17152685