




Leveraging High-Frequency UAV–LiDAR Surveys to Monitor Earthflow Dynamics—The Baldiola Landslide Case Study

 , , , , ,
, , , , ,
Abstract
1. Introduction
2. Case Study
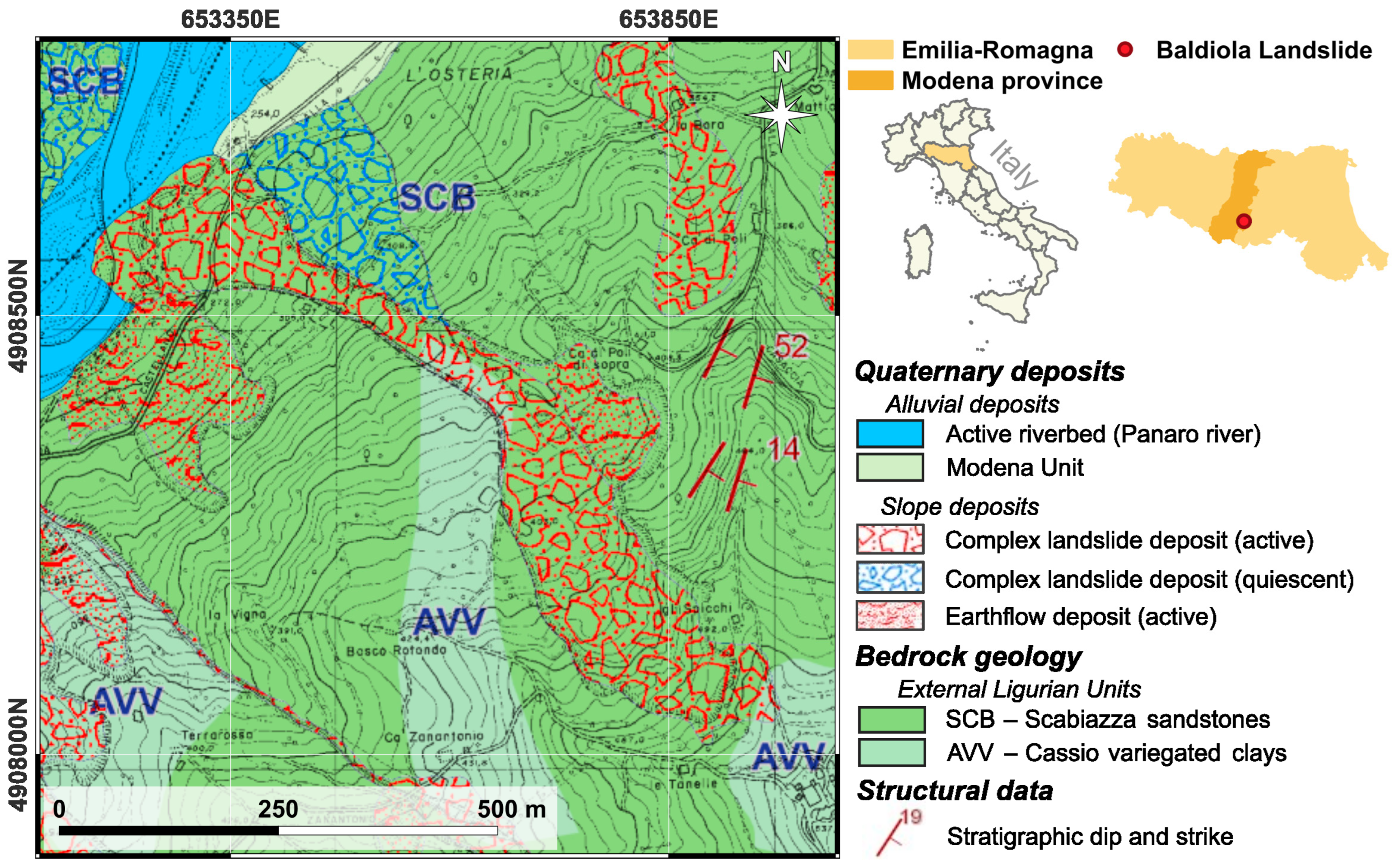
2.1. Geographical and Geological Setting
2.2. Geomorphological Features and Historical Activity
3. Materials and Methods
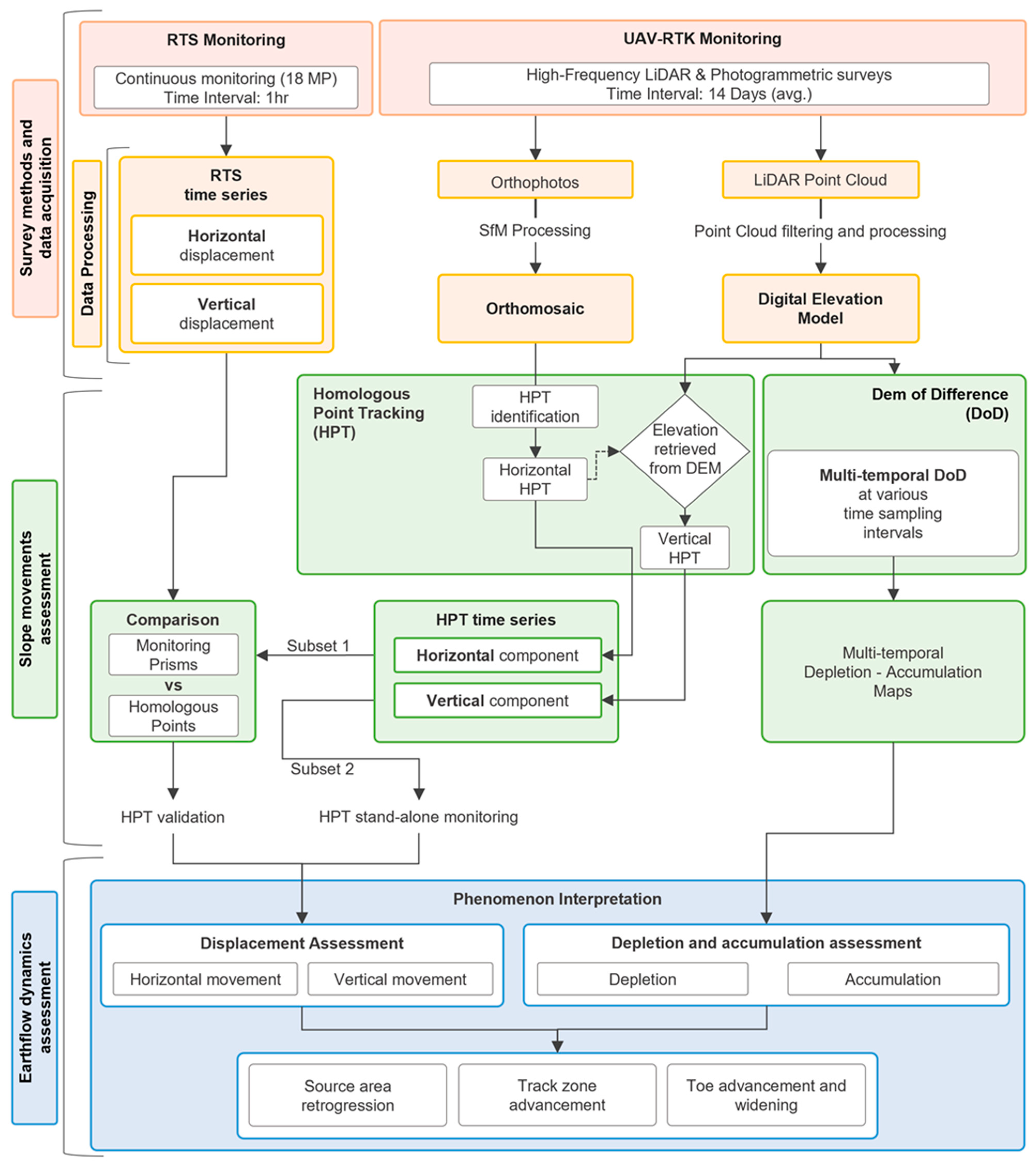
3.1. Operational Framework
3.2. Survey Methods
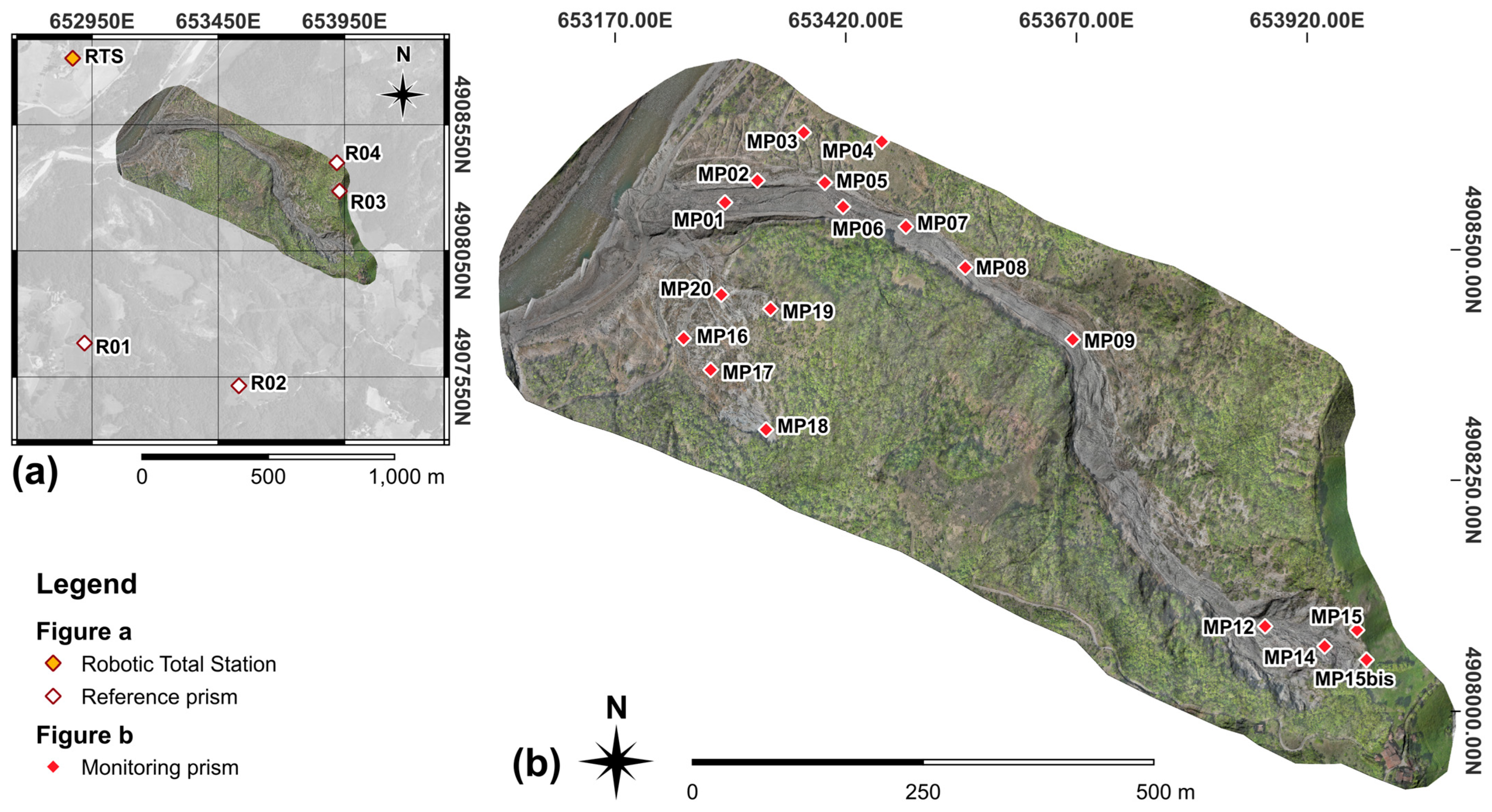
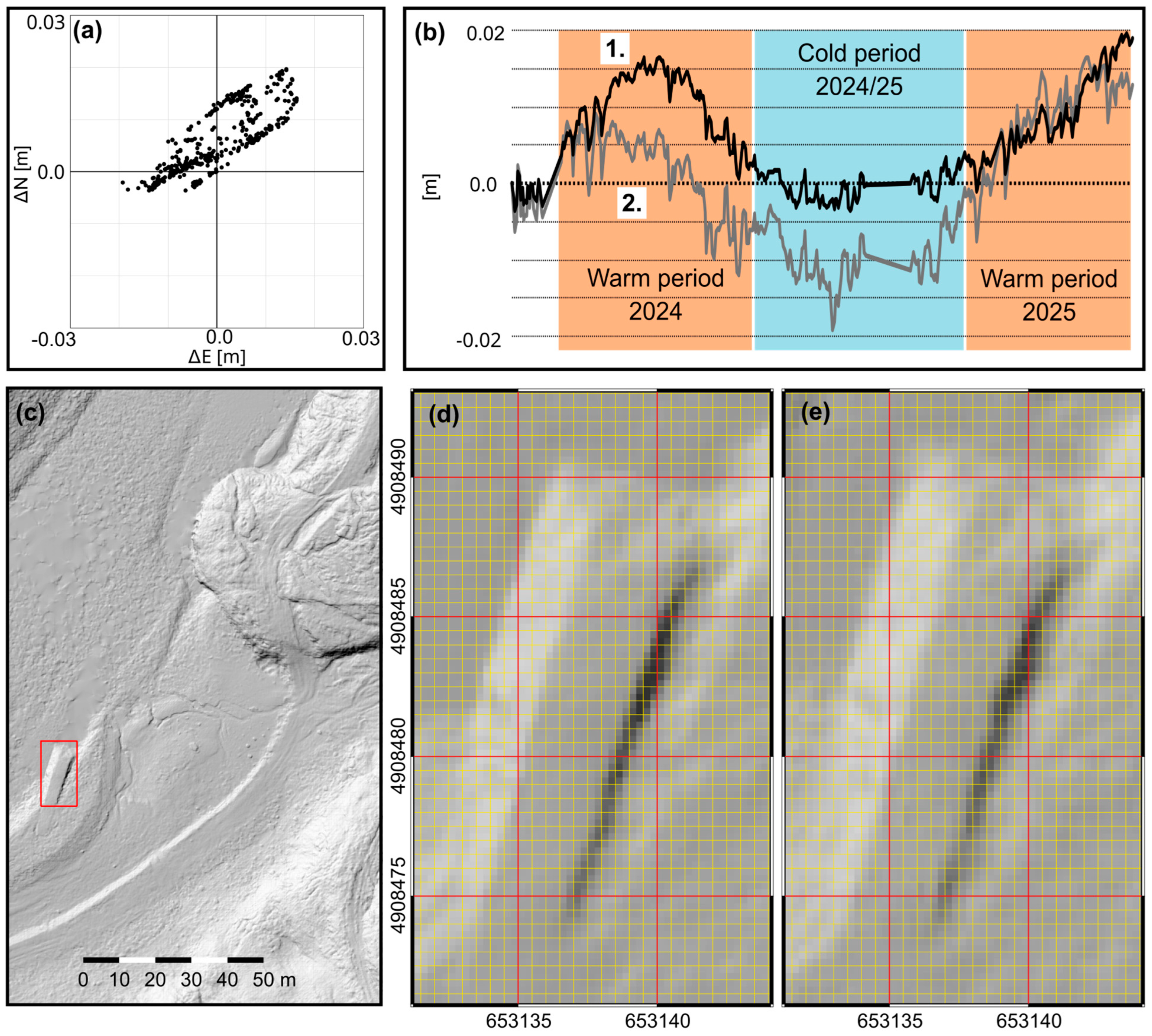
3.2.1. Robotic Total Station Monitoring
3.2.2. UAV Monitoring
3.3. Slope Movements Assessment
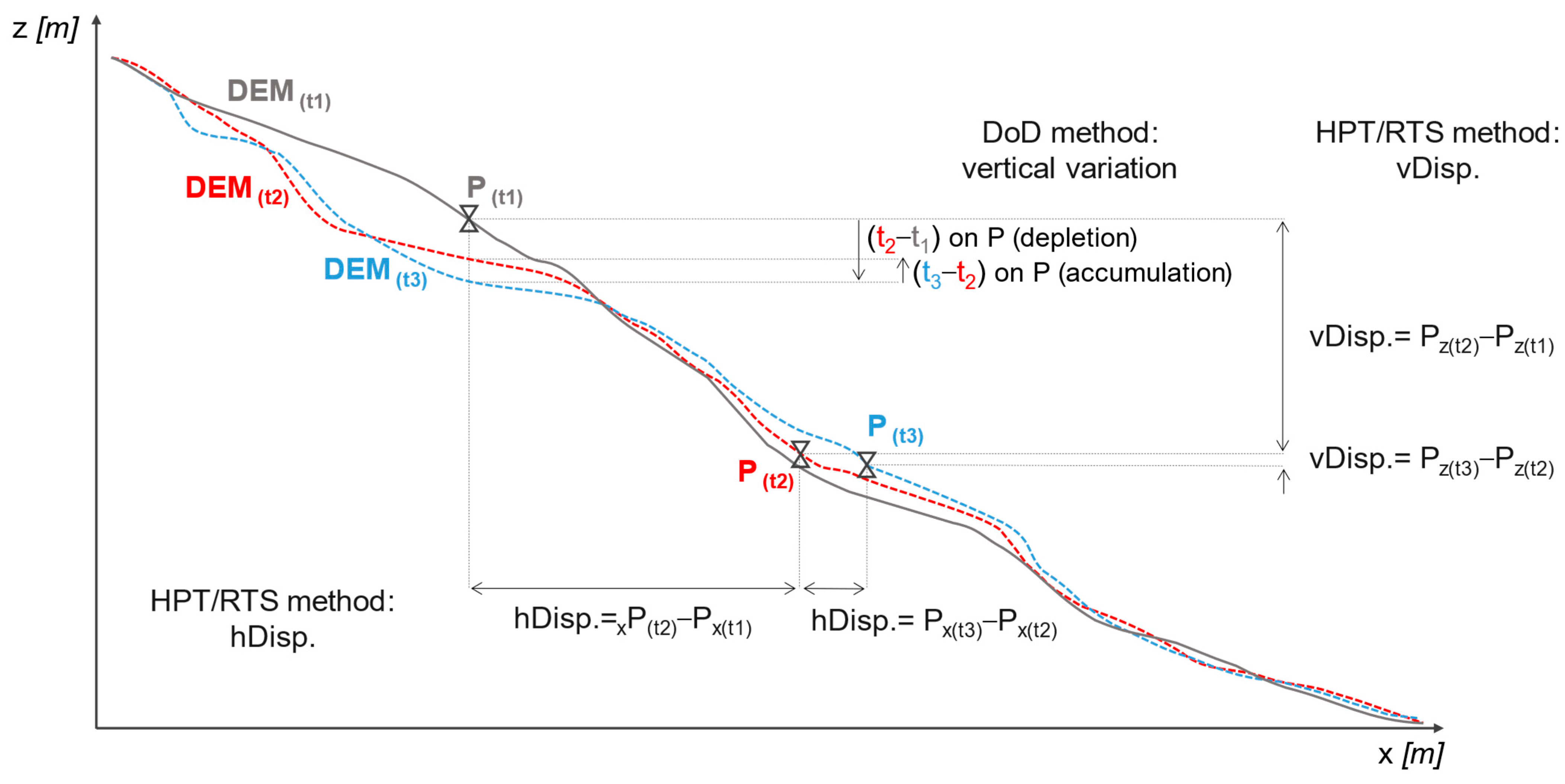
3.3.1. Horizontal and Vertical Displacement Assessment with Homologous Point Tracking
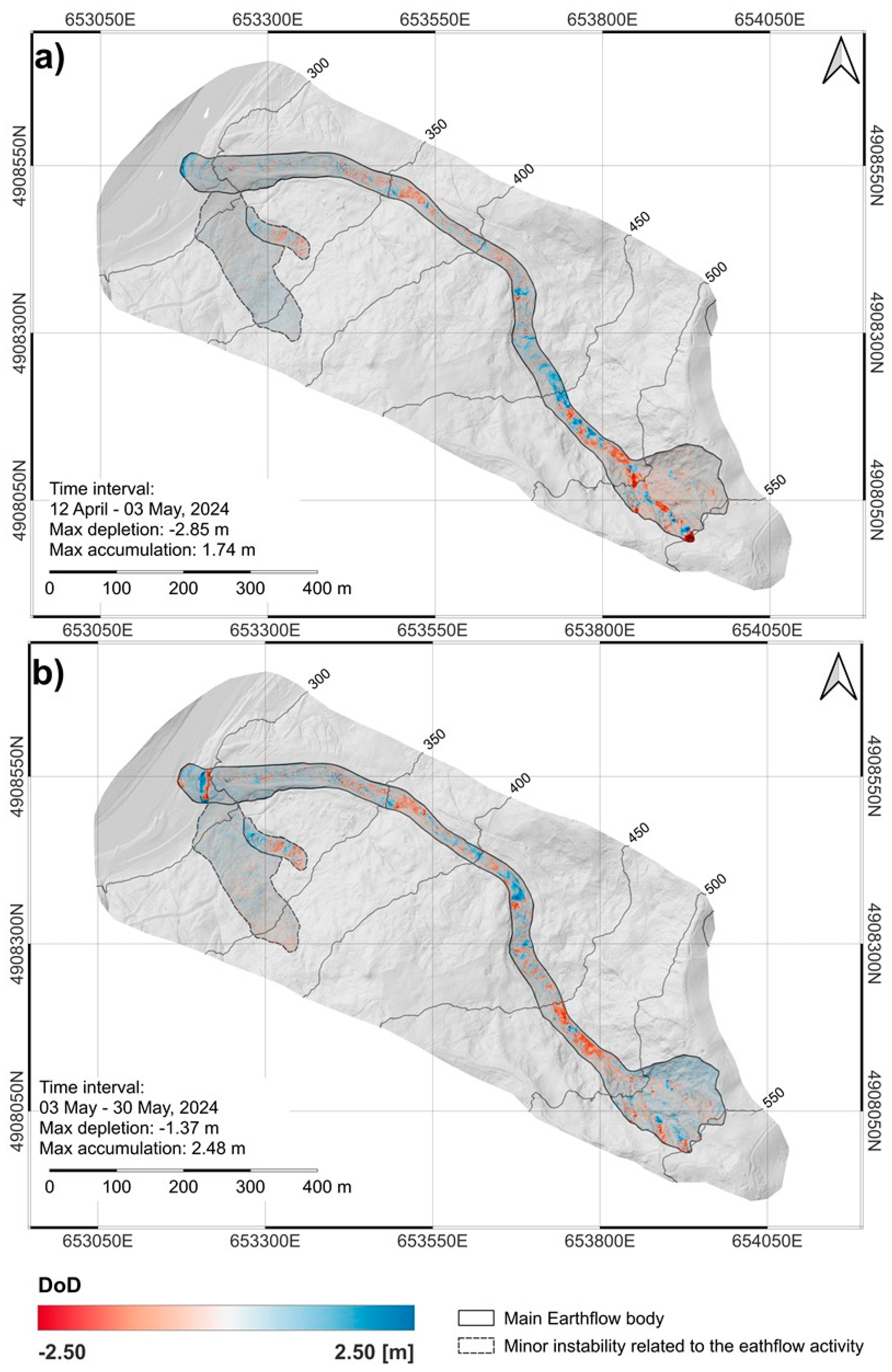
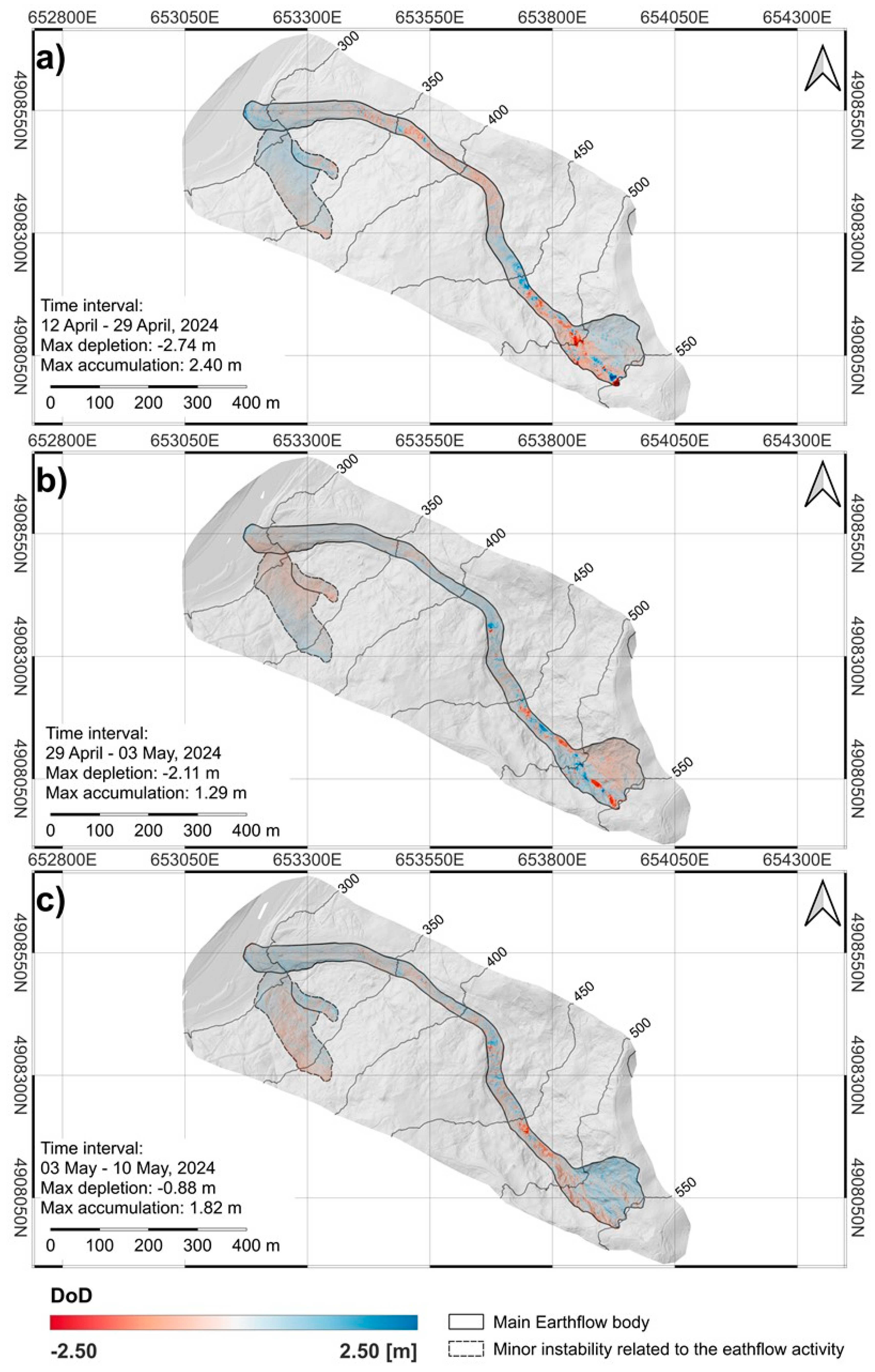
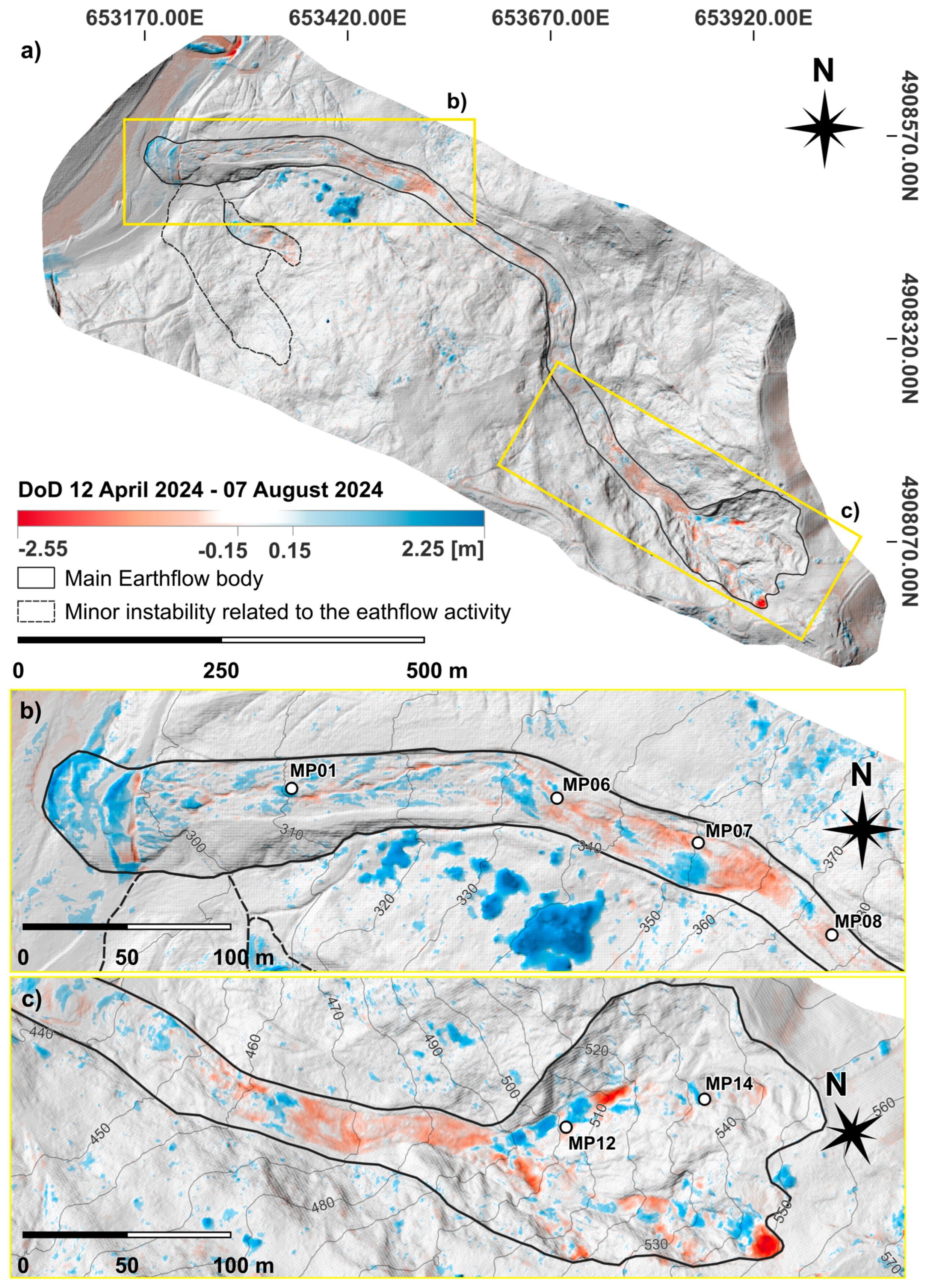
3.3.2. Analysis of Depletion and Accumulation Using Multi-Temporal DoD
4. Results
4.1. Spatial Synopsis of HPT and RTS Monitoring Results
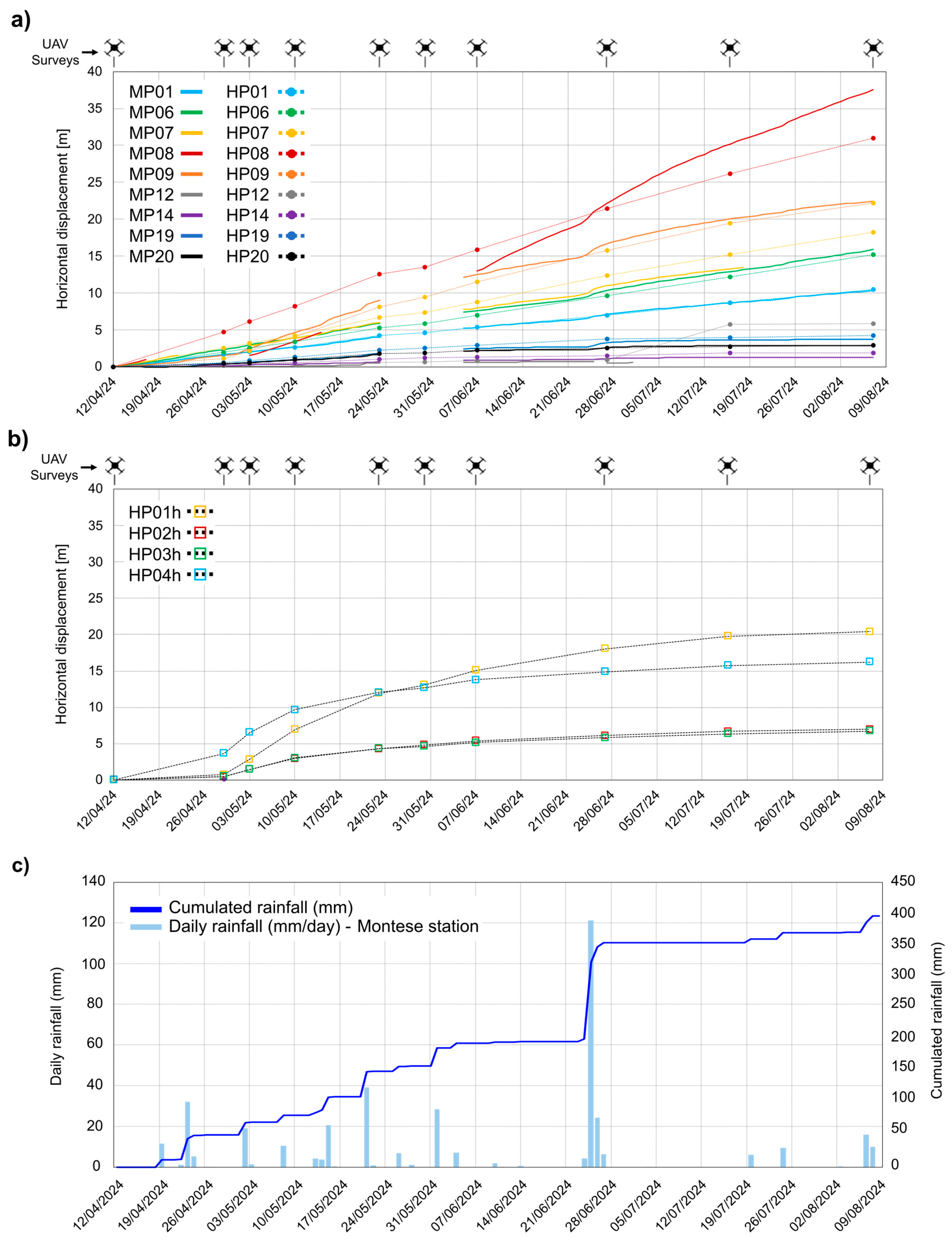
4.1.1. Time Series of HPT and RTS Horizontal Displacements
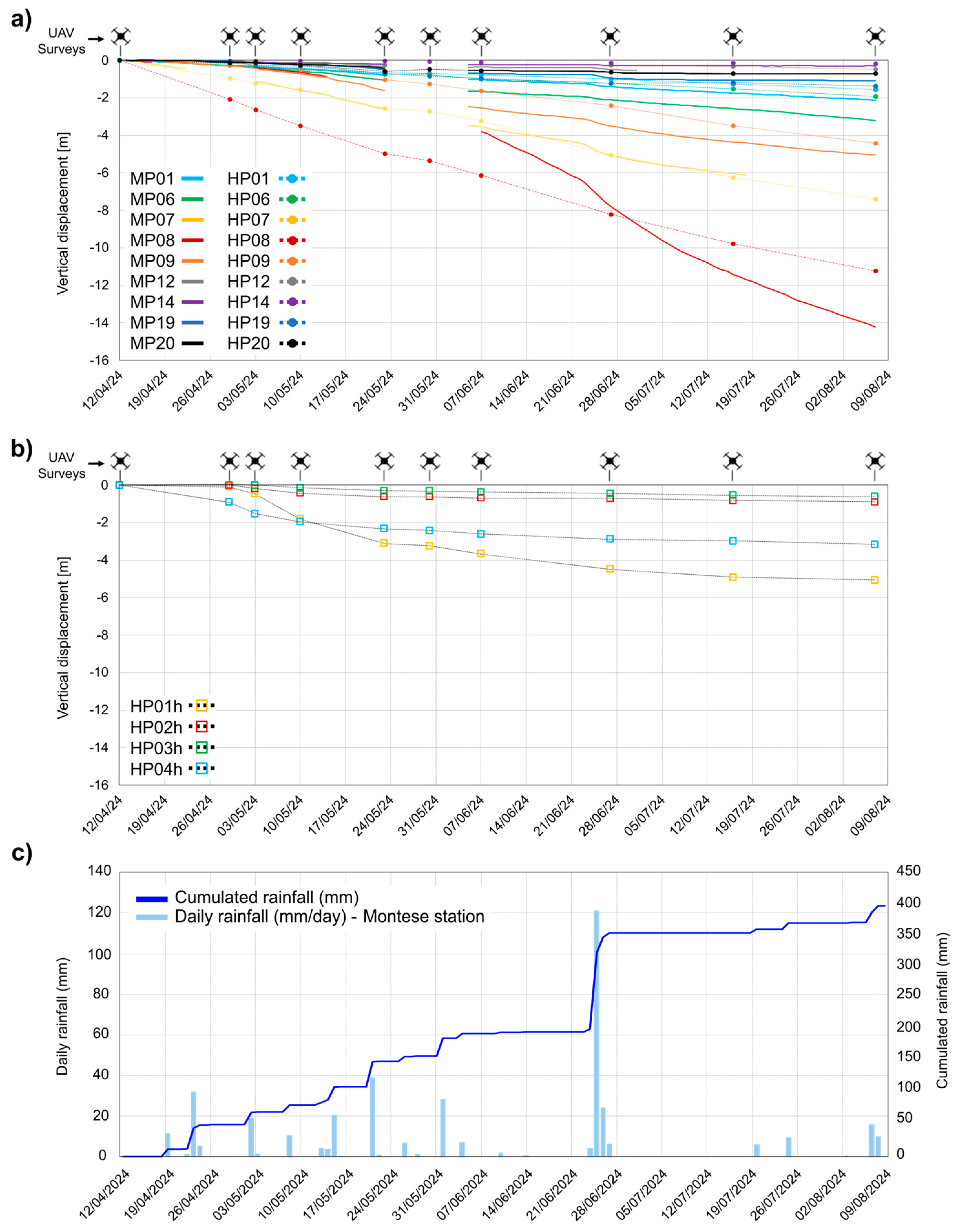
4.1.2. Time Series of HPT and RTS Vertical Displacements
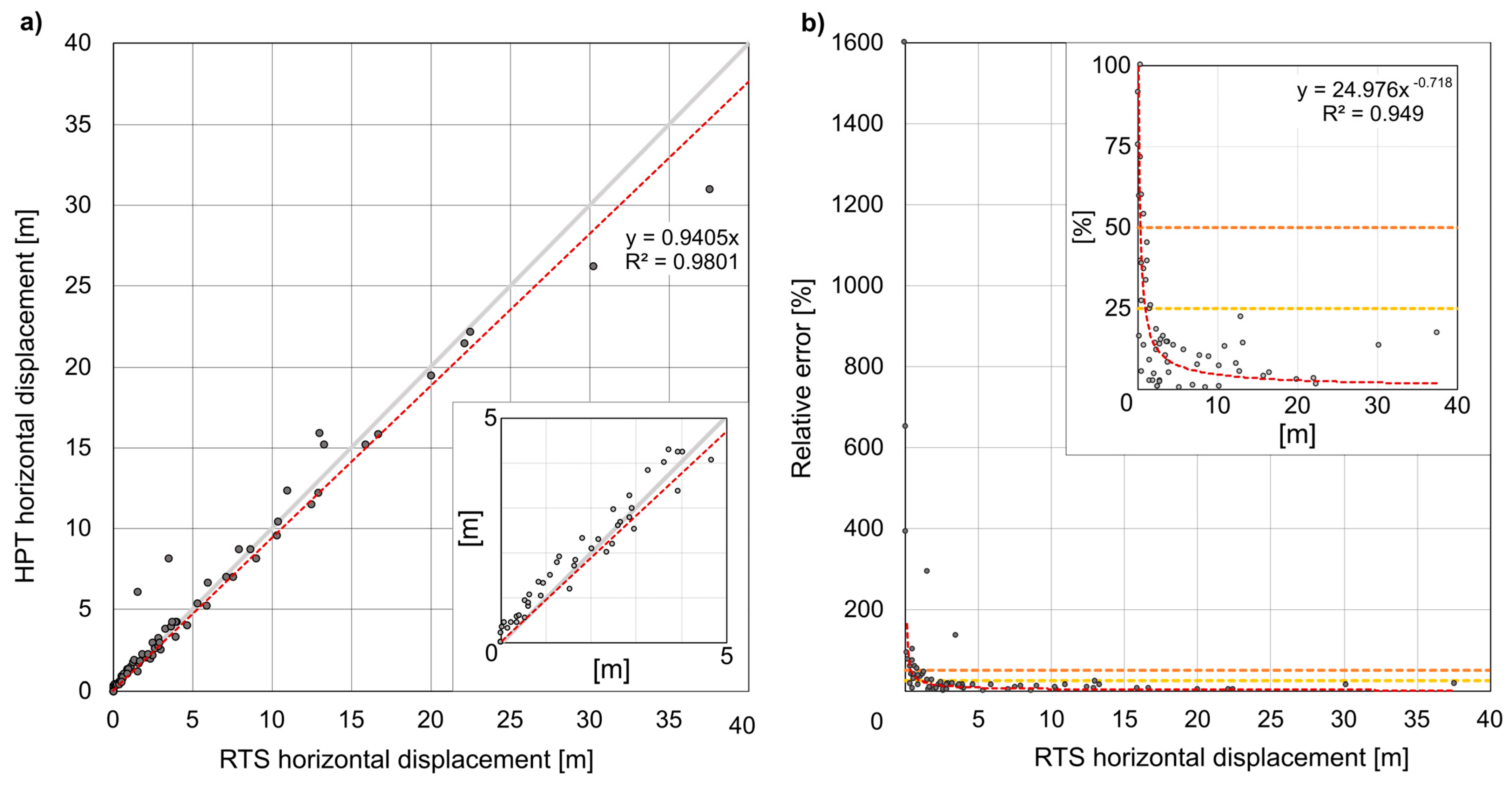
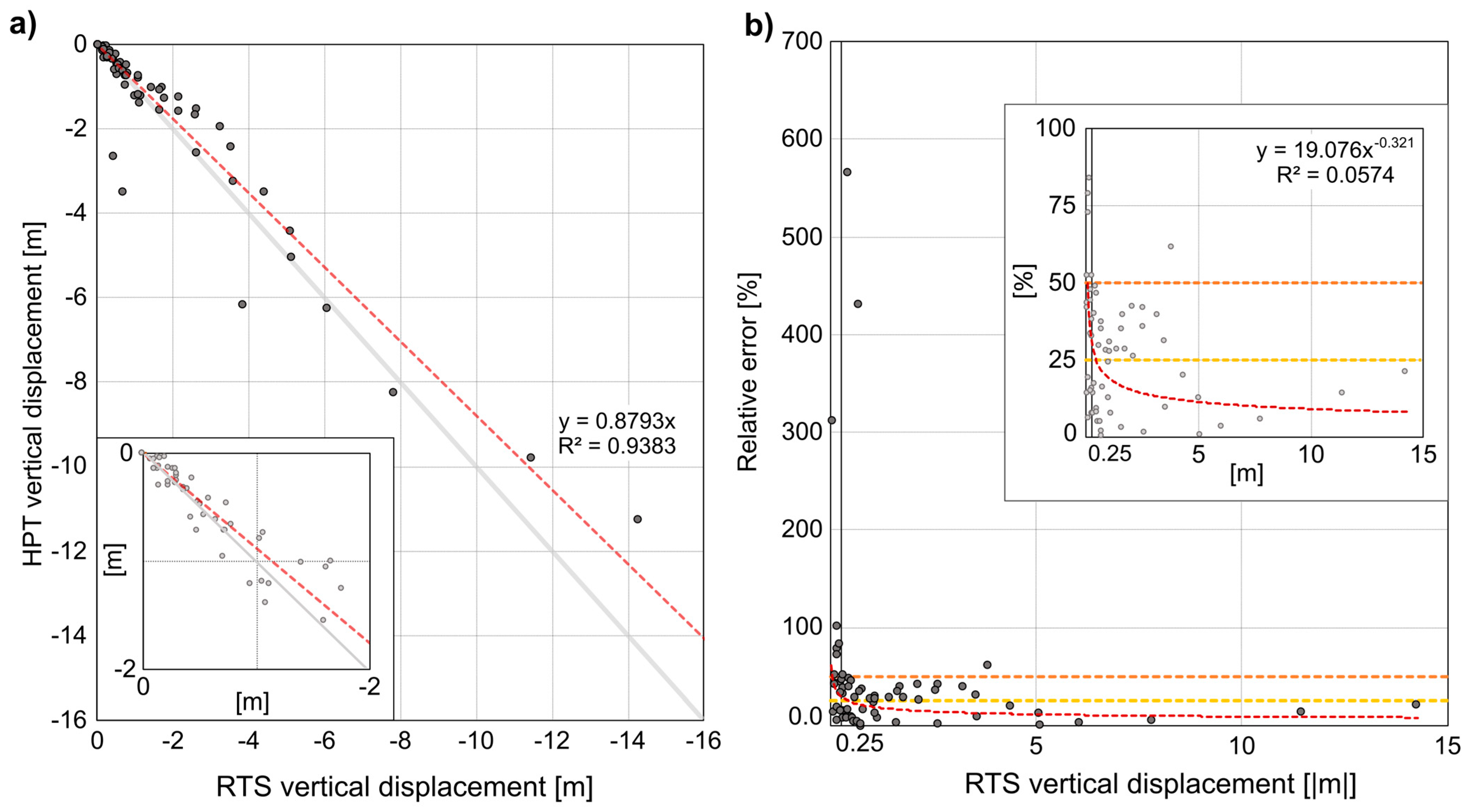
4.1.3. Correlation Between HPT and RTS Displacement Data
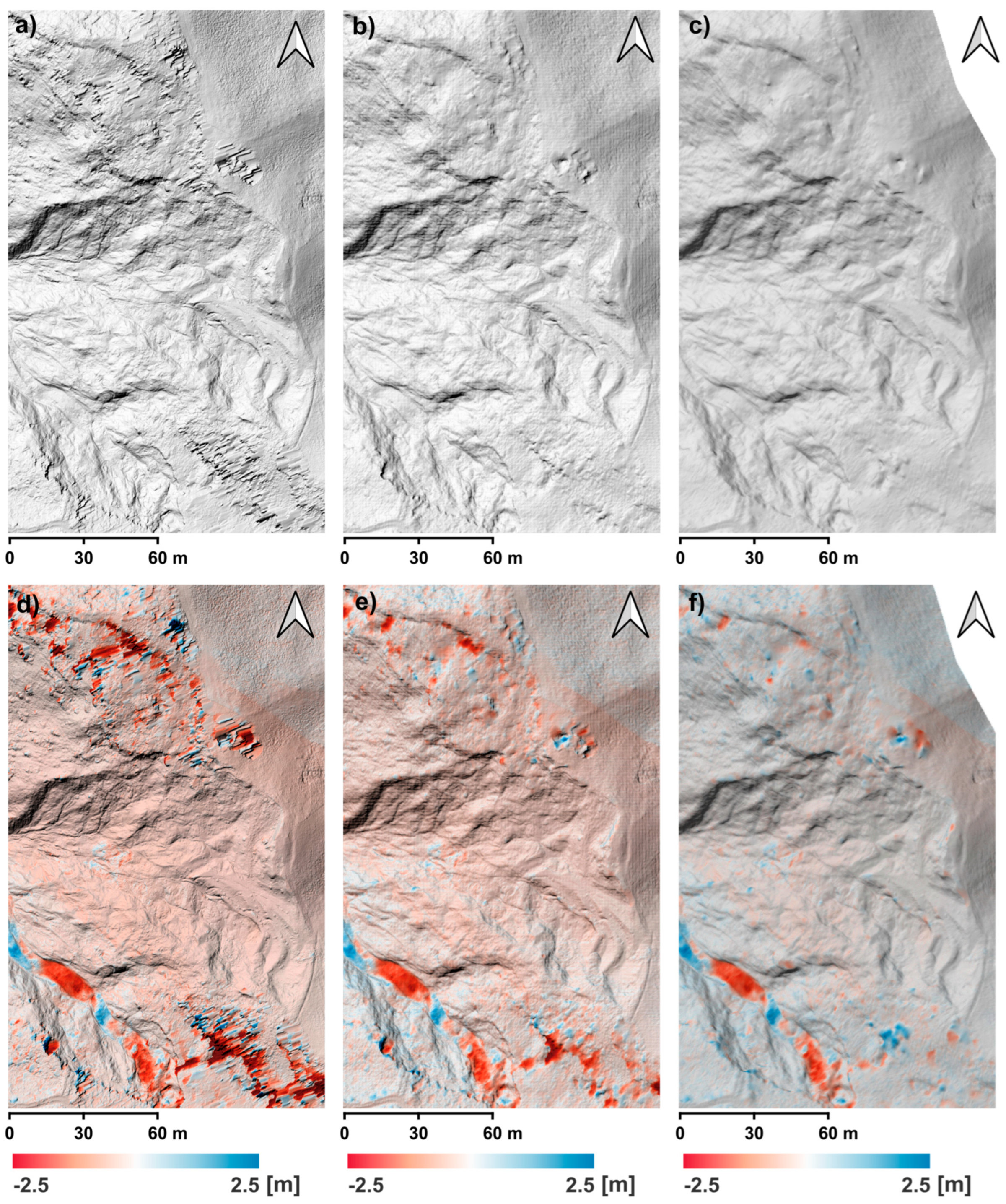
4.2. Results of DoD Analysis
5. Discussion
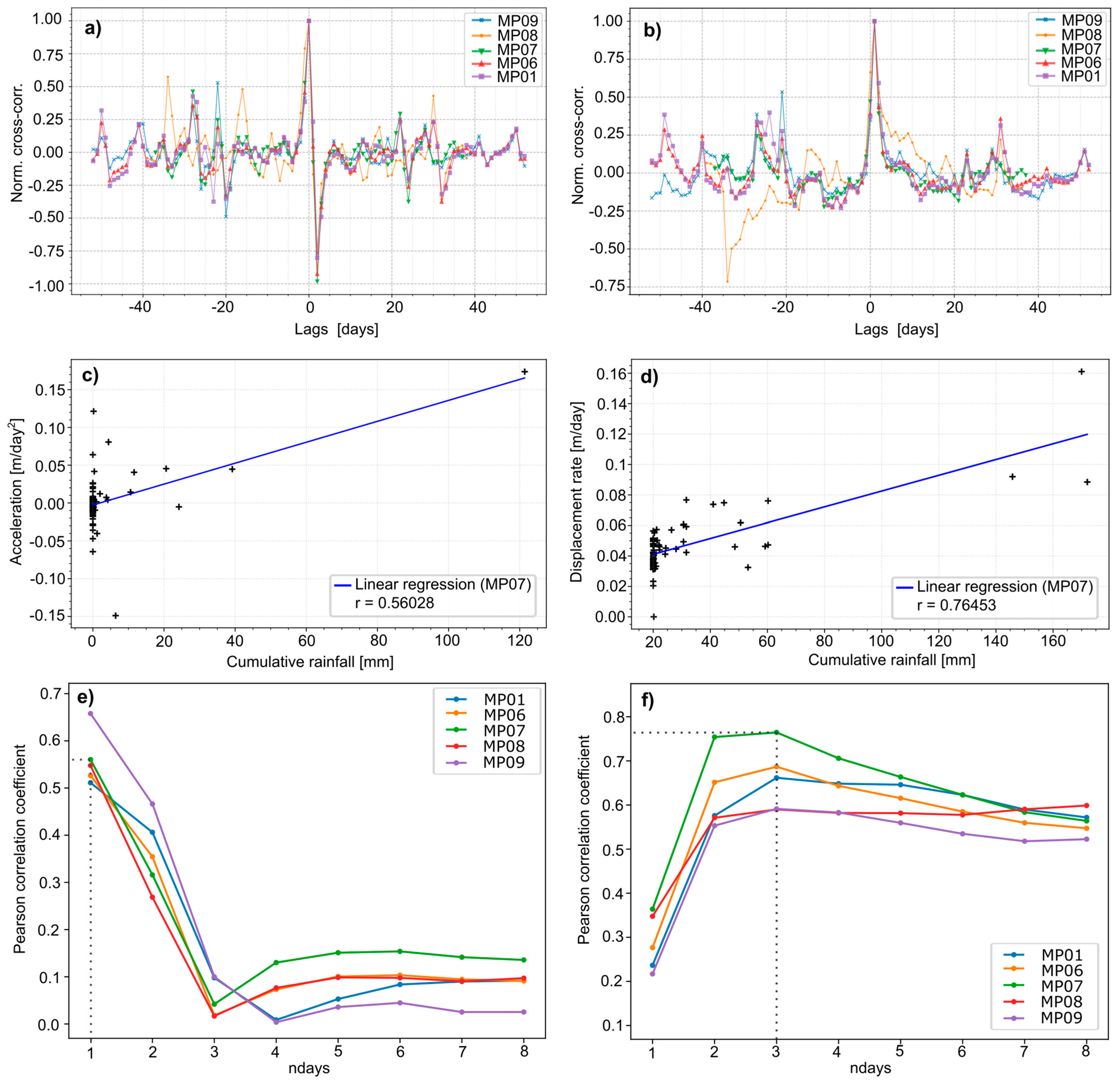
5.1. Insight on Earth-Flow Dynamics
5.2. Operational and Technical Issues
5.3. Transferability of Methods and Broader Applications
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DEM | Digital Elevation Model |
| DIC | Digital Image Correlation |
| DoD | DEM of Difference |
| DSM | Digital Surface Model |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| GSD | Ground Sampling Distance |
| HP | Homologous Point |
| HPT | Homologous Point Tracking |
| LiDAR | Light Detection and Ranging |
| MP | Monitoring Prism |
| RTK | Real-Time Kinematic |
| NRTK | Network Real-Time Kinematic |
| RTS | Robotic Total Station |
| SfM | Structure for Motion |
| UAV | Uncrewed Aerial Vehicle |
Appendix A
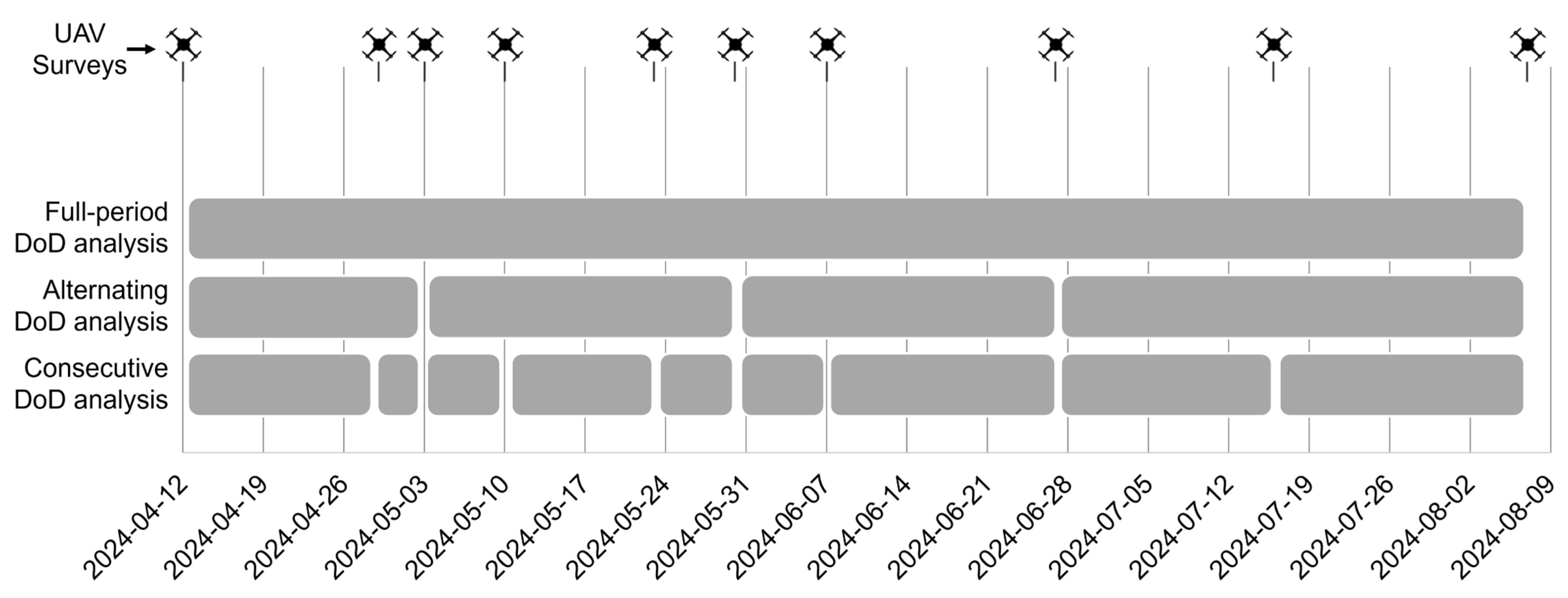
Appendix A.1. Alternate DoD Analysis

Appendix A.2. Consecutive DoD Analysis


References
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide Prediction, Monitoring and Early Warning: A Concise Review of State-of-the-Art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- Catelan, F.T.; Bossi, G.; Schenato, L.; Tondo, M.; Critelli, V.; Mulas, M.; Ciccarese, G.; Corsini, A.; Tonidandel, D.; Mair, V.; et al. Long-Term Monitoring of Active Large-Scale Landslides for Non-Structural Risk Mitigation—Integrated Sensors and Web-Based Platform. J. Mt. Sci. 2025, 22, 1–15. [Google Scholar] [CrossRef]
- Mantovani, M.; Bossi, G.; Dykes, A.P.; Pasuto, A.; Soldati, M.; Devoto, S. Coupling Long-Term GNSS Monitoring and Numerical Modelling of Lateral Spreading for Hazard Assessment Purposes. Eng. Geol. 2022, 296, 106466. [Google Scholar] [CrossRef]
- Casagli, N.; Intrieri, E.; Tofani, V.; Gigli, G.; Raspini, F. Landslide Detection, Monitoring and Prediction with Remote-Sensing Techniques. Nat. Rev. Earth Environ. 2023, 4, 51–64. [Google Scholar] [CrossRef]
- Corsini, A.; Bonacini, F.; Mulas, M.; Petitta, M.; Ronchetti, F.; Truffelli, G. Long-Term Continuous Monitoring of a Deep-Seated Compound Rock Slide in the Northern Apennines (Italy). In Engineering Geology for Society and Territory—Volume 2: Landslide Processes; Springer International Publishing: Cham, Switzerland, 2015; pp. 1337–1340. [Google Scholar] [CrossRef]
- Critelli, V.; Ronchetti, F.; Berti, M.; Bernardi, A.R.; Caputo, G.; Ciccarese, G.; Mulas, M.; Bernardi, M.; Corsini, A. Slope Response to Effective Rainfall of a Large, Complex Rock-Slide in Flysch Material. Ital. J. Eng. Geol. Environ. 2024, 77–84. [Google Scholar] [CrossRef]
- Glueer, F.; Loew, S.; Seifert, R.; Aaron, J.; Grämiger, L.; Conzett, S.; Limpach, P.; Wieser, A.; Manconi, A. Robotic Total Station Monitoring in High Alpine Paraglacial Environments: Challenges and Solutions from the Great Aletsch Region (Valais, Switzerland). Geosciences 2021, 11, 471. [Google Scholar] [CrossRef]
- Corsini, A.; Baiguera, G.; Capuano, F.; Ciccarese, G.; Diena, M.; Mulas, M.; Ronchetti, F.; Rossi, G.; Truffelli, G. Micropiles Tripods Shields (MTS) as Unconventional Breakers for the Control of Moderately Rapid Earthflows (Sassi Neri Landslide, Northern Apennines). Ital. J. Eng. Geol. Environ. 2021, 35–45. [Google Scholar] [CrossRef]
- Lucieer, A.; de Jong, S.M.; Turner, D. Mapping Landslide Displacements Using Structure from Motion (SfM) and Image Correlation of Multi-Temporal UAV Photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Azmoon, B.; Biniyaz, A.; Liu, Z. Use of High-Resolution Multi-Temporal DEM Data for Landslide Detection. Geosciences 2022, 12, 378. [Google Scholar] [CrossRef]
- Godone, D.; Allasia, P.; Borrelli, L.; Gullà, G. UAV and Structure from Motion Approach to Monitor the Maierato Landslide Evolution. Remote Sens. 2020, 12, 1039. [Google Scholar] [CrossRef]
- Giordan, D.; Hayakawa, Y.S.; Nex, F.; Tarolli, P. Preface: The Use of Remotely Piloted Aircraft Systems (RPAS) in Monitoring Applications and Management of Natural Hazards. Nat. Hazards Earth Syst. Sci. 2018, 18, 3085–3087. [Google Scholar] [CrossRef]
- Huang, H.; Long, J.; Yi, W.; Yi, Q.; Zhang, G.; Lei, B. A Method for Using Unmanned Aerial Vehicles for Emergency Investigation of Single Geo-Hazards and Sample Applications of This Method. Nat. Hazards Earth Syst. Sci. 2017, 17, 1961–1979. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Tondo, M.; Mulas, M.; Ciccarese, G.; Marcato, G.; Bossi, G.; Tonidandel, D.; Mair, V.; Corsini, A. Detecting Recent Dynamics in Large-Scale Landslides via the Digital Image Correlation of Airborne Optic and LiDAR Datasets: Test Sites in South Tyrol (Italy). Remote Sens. 2023, 15, 2971. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time Series Analysis of Landslide Dynamics Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Brook, M.S.; Merkle, J. Monitoring Active Landslides in the Auckland Region Utilising UAV/Structure-from-Motion Photogrammetry. Jpn Geotech. Soc. Spec. Publ. 2019, 6, 1–6. [Google Scholar] [CrossRef]
- Stringer, J.; Brook, M.S.; Justice, R. Post-Earthquake Monitoring of Landslides along the Southern Kaikōura Transport Corridor, New Zealand. Landslides 2021, 18, 409–423. [Google Scholar] [CrossRef]
- Izumida, A.; Uchiyama, S.; Sugai, T. Application of UAV-SfM Photogrammetry and Aerial Lidar to a Disastrous Flood: Repeated Topographic Measurement of a Newly Formed Crevasse Splay of the Kinu River, Central Japan. Nat. Hazards Earth Syst. Sci. 2017, 17, 1505–1519. [Google Scholar] [CrossRef]
- Saroglou, C.; Asteriou, P.; Zekkos, D.; Tsiambaos, G.; Clark, M.; Manousakis, J. UAV-Based Mapping, Back Analysis and Trajectory Modeling of a Coseismic Rockfall in Lefkada Island, Greece. Nat. Hazards Earth Syst. Sci. 2018, 18, 321–333. [Google Scholar] [CrossRef]
- Dai, K.; Li, Z.; Xu, Q.; Tomas, R.; Li, T.; Jiang, L.; Zhang, J.; Yin, T.; Wang, H. Identification and Evaluation of the High Mountain Upper Slope Potential Landslide Based on Multi-Source Remote Sensing: The Aniangzhai Landslide Case Study. Landslides 2023, 20, 1405–1417. [Google Scholar] [CrossRef]
- Minervino Amodio, A.; Corrado, G.; Gallo, I.G.; Gioia, D.; Schiattarella, M.; Vitale, V.; Robustelli, G. Three-Dimensional Rockslide Analysis Using Unmanned Aerial Vehicle and LiDAR: The Castrocucco Case Study, Southern Italy. Remote Sens. 2024, 16, 2235. [Google Scholar] [CrossRef]
- Ciccarese, G.; Tondo, M.; Mulas, M.; Bertolini, G.; Corsini, A. Rapid Assessment of Landslide Dynamics by UAV-RTK Repeated Surveys Using Ground Targets: The Ca’ Lita Landslide (Northern Apennines, Italy). Remote Sens. 2024, 16, 1032. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F. Accuracy Assessment of RTK/PPK UAV-Photogrammetry Projects Using Differential Corrections from Multiple GNSS Fixed Base Stations. Geocarto Int. 2023, 38, 2197507. [Google Scholar] [CrossRef]
- Taddia, Y.; Stecchi, F.; Pellegrinelli, A. Using Dji Phantom 4 Rtk Drone for Topographic Mapping of Coastal Areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Arch. 2019, 42, 625–630. [Google Scholar] [CrossRef]
- Kalacska, M.; Lucanus, O.; Arroyo-Mora, J.P.; Laliberté, É.; Elmer, K.; Leblanc, G.; Groves, A. Accuracy of 3D Landscape Reconstruction without Ground Control Points Using Different Platforms. Drones 2020, 4, 13. [Google Scholar] [CrossRef]
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Dematteis, N.; Wrzesniak, A.; Allasia, P.; Bertolo, D.; Giordan, D. Integration of Robotic Total Station and Digital Image Correlation to Assess the Three-Dimensional Surface Kinematics of a Landslide. Eng. Geol. 2022, 303, 106655. [Google Scholar] [CrossRef]
- Bickel, V.T.; Manconi, A.; Amann, F. Quantitative Assessment of Digital Image Correlation Methods to Detect and Monitor Surface Displacements of Large Slope Instabilities. Remote Sens. 2018, 10, 865. [Google Scholar] [CrossRef]
- Mulas, M.; Ciccarese, G.; Truffelli, G.; Corsini, A. Integration of Digital Image Correlation of Sentinel-2 Data and Continuous Gnss for Long-Term Slope Movements Monitoring in Moderately Rapid Landslides. Remote Sens. 2020, 12, 2605. [Google Scholar] [CrossRef]
- Gioia, D.; Corrado, G.; Minervino Amodio, A.; Schiattarella, M. Multi-Temporal Morphological Analysis Coupled to Seismic Survey of a Mass Movement from Southern Italy: A Combined Tool to Unravel the History of Complex Slow-Moving Landslides. Nat. Hazards 2024, 120, 13407–13432. [Google Scholar] [CrossRef]
- Parente, C.; Pepe, M. Uncertainty in Landslides Volume Estimation Using DEMs Generated by Airborne Laser Scanner and Photogrammetry Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Arch. 2018, 42, 397–404. [Google Scholar] [CrossRef]
- Bossi, G.; Cavalli, M.; Crema, S.; Frigerio, S.; Quan Luna, B.; Mantovani, M.; Marcato, G.; Schenato, L.; Pasuto, A. Multi-Temporal LiDAR-DTMs as a Tool for Modelling a Complex Landslide: A Case Study in the Rotolon Catchment (Eastern Italian Alps). Nat. Hazards Earth Syst. Sci. 2015, 15, 715–722. [Google Scholar] [CrossRef]
- Lane, S.N.; Westaway, R.M.; Hicks, D.M. Estimation of Erosion and Deposition Volumes in a Large, Gravel-Bed, Braided River Using Synoptic Remote Sensing. Earth Surf. Process Landf. 2003, 28, 249–271. [Google Scholar] [CrossRef]
- Corsini, A.; Borgatti, L.; Cervi, F.; Dahne, A.; Ronchetti, F.; Sterzai, P. Estimating Mass-Wasting Processes in Active Earth Slides—Earth Flows with Time-Series of High-Resolution DEMs from Photogrammetry and Airborne LiDAR. Nat. Hazards Earth Syst. Sci. 2009, 9, 433–439. [Google Scholar] [CrossRef]
- Bettelli, G.; Panini, F.; Pizziolo, M. Carta Geologica d’Italia Alla Scala 1:50.000—Foglio 236 Pavullo Nel Frignano. 2002. Available online: https://www.openaccessrepository.it/records/0eeby-dww93 (accessed on 27 July 2025).
- Regione Emilia-Romagna. Servizi OGC—Elenco Capabilities Dei Servizi WMS. Geoportale Regione Emilia-Romagna. Available online: https://geoportale.regione.emilia-romagna.it/servizi/servizi-ogc/elenco-capabilities-dei-servizi-wms (accessed on 9 December 2024).
- Bettelli, G.; Panini, F. Introduction to the Geology of the South-Eastern Sector of the Emilia Apennines, Guide to the Northern Apennine Traverse. In Proceedings of the 76th Summer Meeting-Congress of the Italian Geological Society (SGI), Florence, Italy, 16–20 September 1992; pp. 207–240. [Google Scholar]
- Cruden, D.M.; Varnes, D.J. Landslide Types and Processes. In Landslides: Investigation and Mitigation; National Academy Press: Washington, DC, USA, 1996; Volume Special Report 247, pp. 36–75. ISBN 030906208X. [Google Scholar]
- Regione Emilia-Romagna. L’archivio Storico Dei Movimenti Franosi. Regione Emilia-Romagna Geoportale. Available online: https://ambiente.regione.emilia-romagna.it/it/geologia/geologia/dissesto-idrogeologico/larchivio-storico-dei-movimenti-franosi (accessed on 4 November 2024).
- Google Earth Pro, Version 7.3.6; Google LLC: Mountain View, CA, USA, 2025.
- Mesas-Carrascosa, F.J.; García, M.D.N.; De Larriva, J.E.M.; García-Ferrer, A. An Analysis of the Influence of Flight Parameters in the Generation of Unmanned Aerial Vehicle (UAV) Orthomosaics to Survey Archaeological Areas. Sensors 2016, 16, 1838. [Google Scholar] [CrossRef]
- DJI. DJI Terra, Version 4.3.0; DJI Technology Co., Ltd.: Shenzhen, China, 2025.
- QGIS.org. QGIS Geographic Information System, Version 3.36; Open Source Geospatial Foundation Project. 2025. Available online: https://www.qgis.org (accessed on 21 January 2025).
- Hutchinson, J.N.; Bhandari, R.K. Undrained Loading, A Fundamental Mechanism of Mudflows and Other Mass Movements. Géotechnique 1971, 21, 353–358. [Google Scholar] [CrossRef]
- Torre, D.; Zocchi, M.; Iacobucci, G.; Menichetti, M.; Toselli, R.; Troiani, F.; Piacentini, D. Morphoevolutive Drivers on a Rapidly-Evolving Soft Rocky Cliff and Connected Shore Platform System. Earth Surf. Process Landf. 2025, 50, e70117. [Google Scholar] [CrossRef]
- Zocchi, M.; Delchiaro, M.; Troiani, F.; Scarascia Mugnozza, G.; Mazzanti, P. PS-InSAR Post-Processing for Assessing the Spatio-Temporal Differential Kinematics of Complex Landslide Systems: A Case Study of DeBeque Canyon Landslide (Colorado, USA). Earth Surf. Process Landf. 2024, 49, 4862–4880. [Google Scholar] [CrossRef]
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne Lidar Change Detection: An Overview of Earth Sciences Applications. Earth Sci. Rev. 2019, 198, 102929. [Google Scholar] [CrossRef]
- Meng, Y.; Lan, H.; Li, L.; Wu, Y.; Li, Q. Characteristics of Surface Deformation Detected by X-Band SAR Interferometry over Sichuan-Tibet Grid Connection Project Area, China. Remote Sens. 2015, 7, 12265–12281. [Google Scholar] [CrossRef]
- Mora, O.; Lenzano, M.; Toth, C.; Grejner-Brzezinska, D.; Fayne, J. Landslide Change Detection Based on Multi-Temporal Airborne LiDAR-Derived DEMs. Geosciences 2018, 8, 23. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Surveys | ||
|---|---|---|
| Survey | Date (DD MM YYYY) | Time Interval (Days) |
| 1 | 12 April 2024 | - |
| 2 | 29 April 2024 | 17 |
| 3 | 3 May 2024 | 4 |
| 4 | 10 May 2024 | 7 |
| 5 | 23 May 2024 | 13 |
| 6 | 30 May 2024 | 7 |
| 7 | 7 June 2024 | 8 |
| 8 | 27 June 2024 | 20 |
| 9 | 16 July 2024 | 19 |
| 10 | 7 August 2024 | 22 |
| Fight Parameters | |
| Flight mode | Planned Route |
| Mapping area | 0.46 km2 |
| Flight altitude | 100–120 m |
| Altitude mode | “Terrain follow” |
| Speed (m/s) | 4–6 m/s |
| LiDAR Parameters | |
| Expected Point Cloud Density (avg.) | 130–140 points/m2 |
| Final Point Cloud Density (avg.) | ~500 points/m2 |
| LiDAR Side Overlap | 30–40% |
| Return mode (n° returns) | 5 |
| Photo Sampling Parameters | |
| Photo Side Overlap | 45% |
| Photo Forward Overlap | 70% |
| Range of N° of photos per survey | Min 175–Max 227 |
| Point Cloud Processing: DJI Terra Setting Parameters | |
| Point Cloud Density selection | By percentage (100%) |
| Ground Type | “Gentle Slope” |
| Building max diagonal | 20 m |
| Iteration angle | 6° |
| Iteration distance | 0.5 m |
| DEM output resolution (GSD) | 25 cm/px |
| Orthomosaic Processing: DJI Terra Setting Parameters | |
| Resolution (High-Medium-Low) | High |
| Computation method | Standalone Computation |
| Light Uniformity | If necessary |
| Ground Sampling Distance: Min-Max (Avg) | 2.95–4.32 (3.23) cm/px |
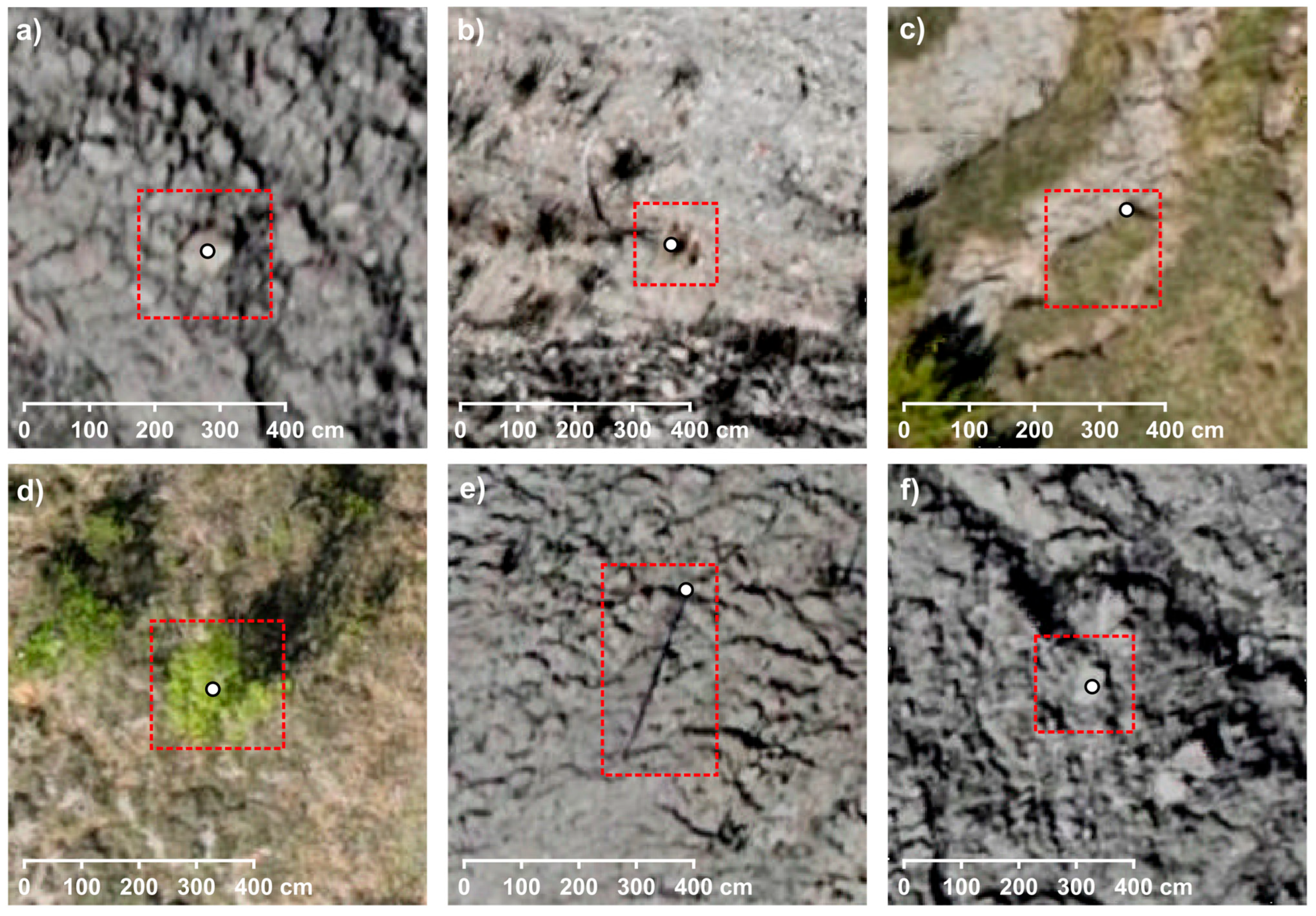
| HP | Subset | Object | Size (Reference Dimension) | Tracking Point Position | Distance from the Corresponding MP (12 April 2024) |
|---|---|---|---|---|---|
| HP01 | 1 | Rock block | 0.47 m (max. diameter) | Centroid | 5.61 m |
| HP02 | 1 | Shrub | 0.45 m (diameter) | Centroid | 3.94 m |
| HP03 | 1 | Shrub/ little tree | 1.65 m (diameter) | Centroid | 2.92 m |
| HP04 | 1 | Shrub | 1.19 m (diameter) | Centroid | 15.39 m |
| HP05 | 1 | Shrub | 0.54 m (diameter) | Centroid | 2.81 m |
| HP06 | 1 | Downed branch | 0.13 m (branch diameter) | Fixed branch end | 9.74 m |
| HP07 | 1 | Rock block | 0.49 m (max. length) | Fixed rock edge | 8.40 m |
| HP08 | 1 | Downed trunk | 0.30 m (trunk diameter) | Fixed trunk end | 20.45 m |
| HP09 | 1 | Downed tree body | 0.34 m (main trunk diameter) | Main trunk end | 11.22 m |
| HP12 | 1 | Rock block | 0.80 m (max. length) | Centroid | 1.07 m |
| HP14 | 1 | Rock block | 0.24 m (diameter) | Centroid | 0.92 m |
| HP15 | 1 | Bare ground patch/rock block | 0.20 m (max. length) | Centroid | 3.09 m |
| HP15bis | 1 | Shrub/grass clump | 0.28 m (max. length) | Centroid | 2.15 m |
| HP16 | 1 | Rock block | 0.83 m (max. length) | Fixed rock edge | 12.10 m |
| HP17 | 1 | Rock block | 0.70 (diameter) | Centroid | 11.73 m |
| HP18 | 1 | Shrub | 0.97 m (diameter) | Centroid | 12.13 m |
| HP19 | 1 | Ground patch | 0.58 m (width) | Fixed edge | 3.82 m |
| HP20 | 1 | Shrub | 0.75 m (diameter) | Centroid | 0.59 m |
| HP01h | 2 | Shrub | 0. 51 m (diameter) | Centroid | - |
| HP02h | 2 | Rock block | 0.44 m (diagonal) | Centroid | - |
| HP03h | 2 | Downed branch | 0.19 m (branch diameter) | Fixed branch end | - |
| HP04h | 2 | Rock block | 0.67 m (diagonal) | Centroid | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lelli, F.; Mulas, M.; Critelli, V.; Fabbiani, C.; Tondo, M.; Aleotti, M.; Corsini, A. Leveraging High-Frequency UAV–LiDAR Surveys to Monitor Earthflow Dynamics—The Baldiola Landslide Case Study. Remote Sens. 2025, 17, 2657. https://doi.org/10.3390/rs17152657
Lelli F, Mulas M, Critelli V, Fabbiani C, Tondo M, Aleotti M, Corsini A. Leveraging High-Frequency UAV–LiDAR Surveys to Monitor Earthflow Dynamics—The Baldiola Landslide Case Study. Remote Sensing. 2025; 17(15):2657. https://doi.org/10.3390/rs17152657
Chicago/Turabian StyleLelli, Francesco, Marco Mulas, Vincenzo Critelli, Cecilia Fabbiani, Melissa Tondo, Marco Aleotti, and Alessandro Corsini. 2025. "Leveraging High-Frequency UAV–LiDAR Surveys to Monitor Earthflow Dynamics—The Baldiola Landslide Case Study" Remote Sensing 17, no. 15: 2657. https://doi.org/10.3390/rs17152657
APA StyleLelli, F., Mulas, M., Critelli, V., Fabbiani, C., Tondo, M., Aleotti, M., & Corsini, A. (2025). Leveraging High-Frequency UAV–LiDAR Surveys to Monitor Earthflow Dynamics—The Baldiola Landslide Case Study. Remote Sensing, 17(15), 2657. https://doi.org/10.3390/rs17152657