
Research on Distributed Collaborative Task Planning and Countermeasure Strategies for Satellites Based on Game Theory Driven Approach

Abstract
1. Introduction
2. Related Work
3. Modeling of Heterogeneous Cluster Deployment Tasks
3.1. Definition and Transformation of Coordinate Systems
- (1)
- Geocentric inertial coordinate system
- (2)
- Orbital coordinate system
3.2. Equations of Relative Motion
- (1)
- For satellite cluster missions in medium-high altitude low Earth circular orbits (LEO), when the mission duration does not exceed several orbital periods, the effects of atmospheric drag perturbation and J2 perturbation on spacecraft can be neglected [21].
- (2)
- A virtual satellite moving along a circular orbit is selected near the participating satellites as the origin of the reference orbit.
- (3)
- When the distance between the participating spacecraft and the origin of the reference orbit is much smaller than the orbital radius of the reference orbit, the second-order and higher-order terms in the relative orbital dynamic equations can be ignored, as the influence of these higher-order terms on the relative motion is minimal at this time.
4. Optimization Design for Satellite Game Mission Deployment Based on Co-Evolution
4.1. Differential Game Model
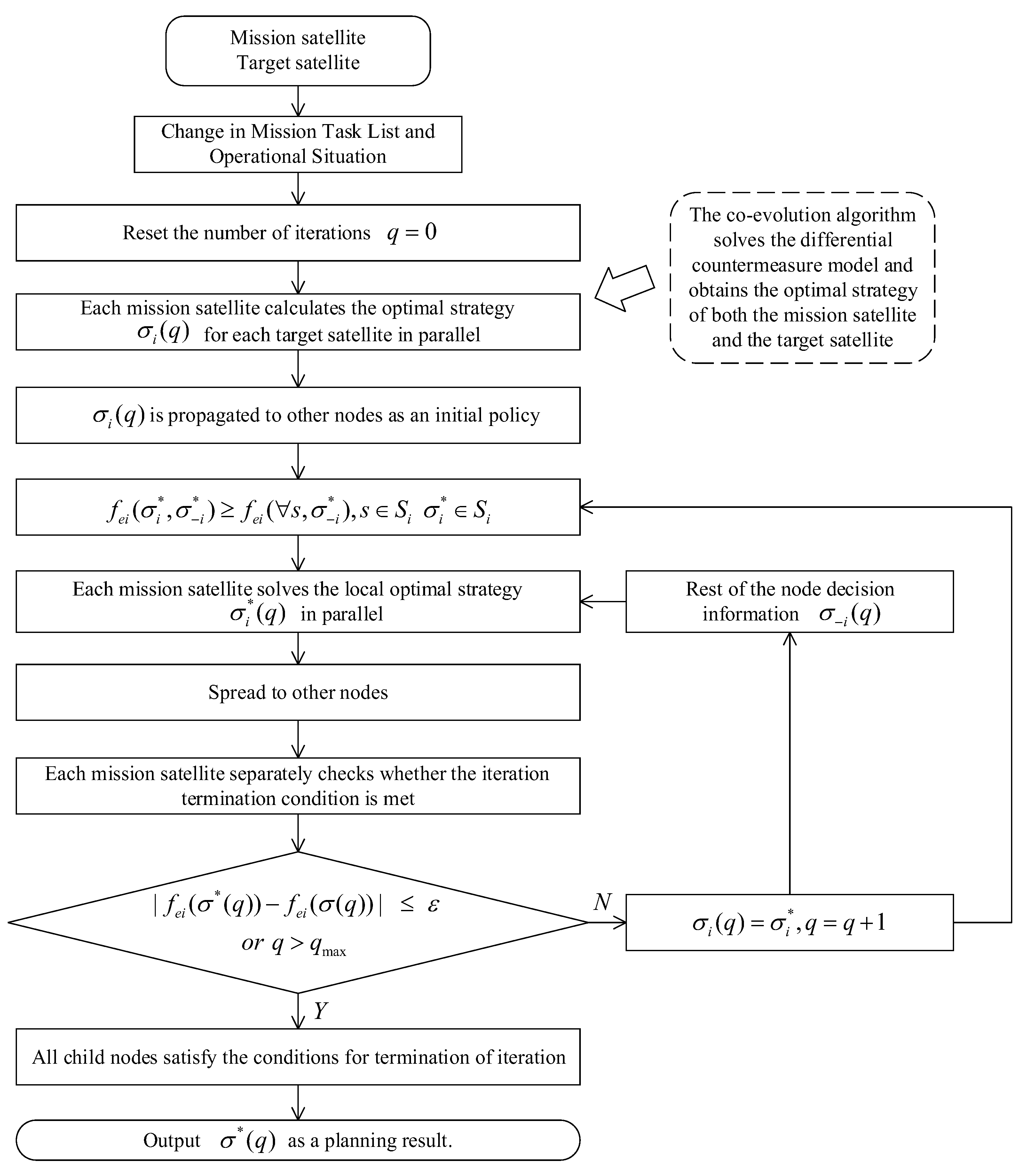
4.2. Design of Co-Evolutionary Algorithm
5. Distributed Heterogeneous Cluster Task Planning Based on Nash Equilibrium
5.1. Construction of a Task Planning Model for Heterogeneous Clusters
5.2. Description of the Simulation Scenario
6. Result Analysis
6.1. Efficiency Convergence Result
6.2. Spatial Positions and Impulse Conditions
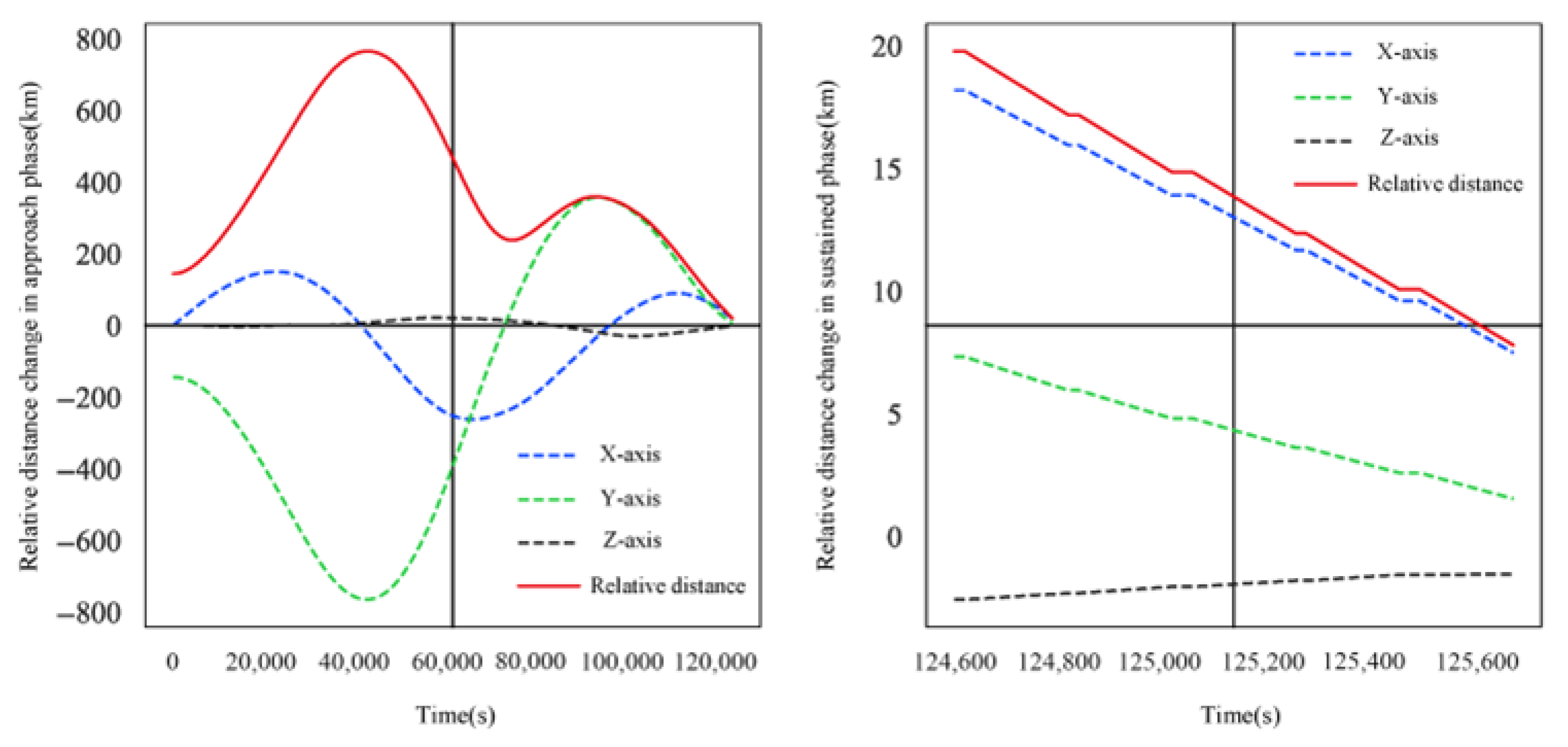
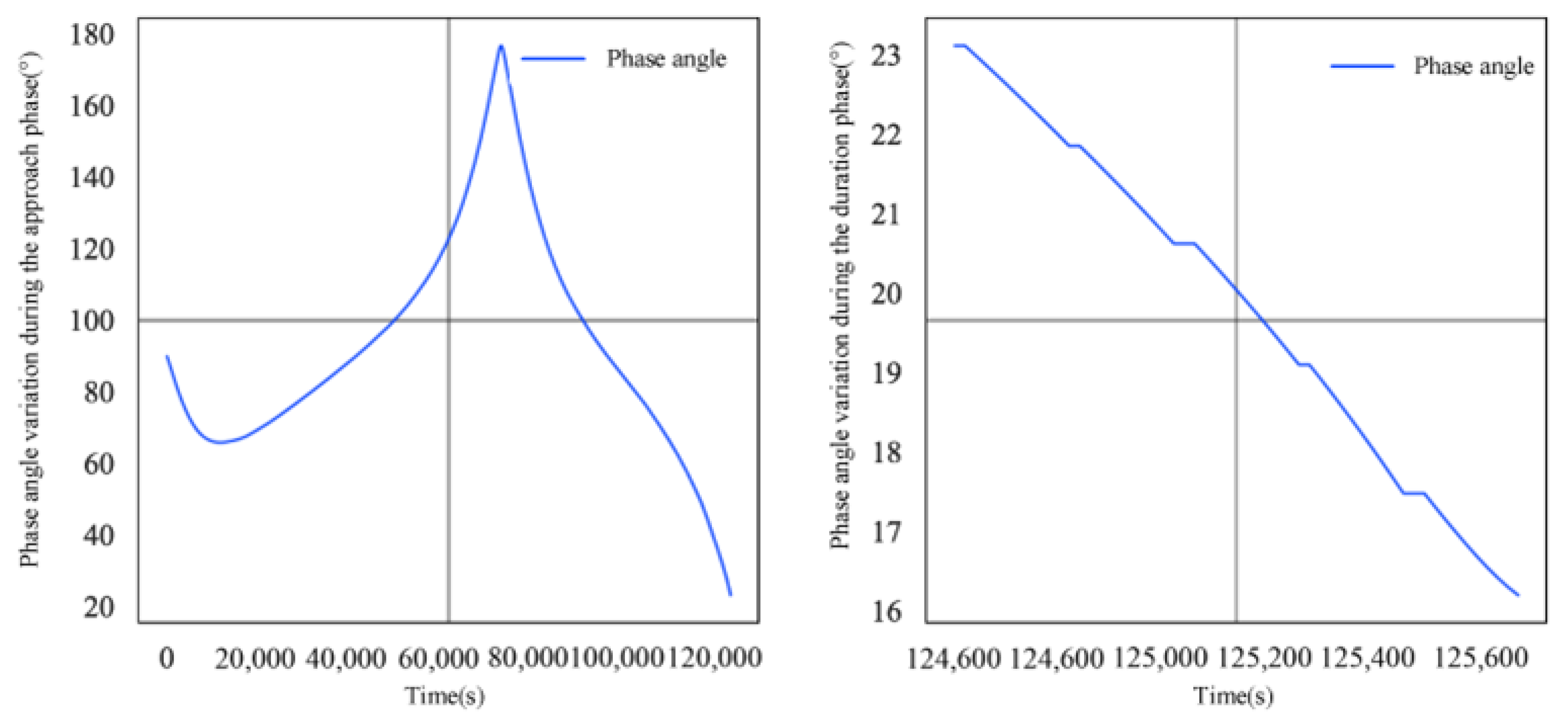
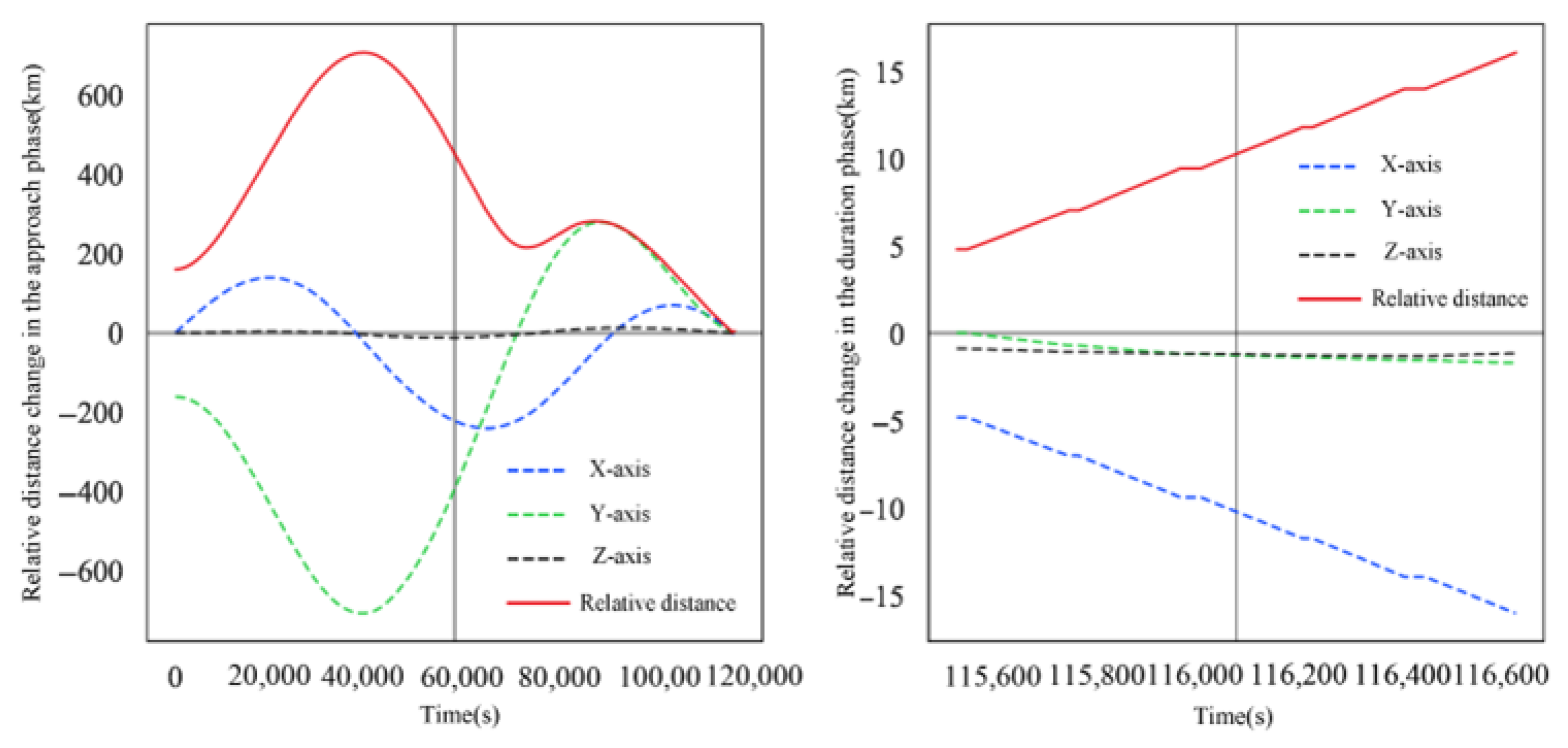
6.3. Feature Variations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Zhang, W. Analysis and Reflection on the Space Security Situation. China Aerosp. 2024, 21–26. (In Chinese) [Google Scholar] [CrossRef]
- Liu, S. Task Planning and Orbit Optimization for Multi-Satellite Interception. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. (In Chinese). [Google Scholar]
- Fourati, F.; Alouini, M.S. Artificial intelligence for satellite communication: A review. Intell. Converg. Netw. 2021, 2, 213–243. [Google Scholar] [CrossRef]
- Zhang, B.; Wu, Y.; Zhao, B.; Chanussot, J.; Hong, D.; Yao, J. Progress and challenges in intelligent remote sensing satellite systems. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 1814–1822. [Google Scholar] [CrossRef]
- Farquhar, R.W.; Muhonen, D.P.; Newman, C.R.; Heubergerg, H.S. Trajectories and orbital maneuvers for the first libration-point satellite. J. Guid. Control. 1980, 3, 549–554. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, L.; Cheng, J.; Zhou, J.; Wang, Y. Task scheduling and attitude planning for agile earth observation satellite with intensive tasks. Aerosp. Sci. Technol. 2019, 90, 23–33. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, C.; Kuang, L.; Wu, S.; Huang, H.; Qian, Y. High-efficient resource allocation in data relay satellite systems with users behavior coordination. IEEE Trans. Veh. Technol. 2018, 67, 12072–12085. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, C.; Liu, L.; Liu, L.; Lan, D.; Jiang, H.; Wan, S. Aerial edge computing on orbit: A task offloading and allocation scheme. IEEE Trans. Netw. Sci. Eng. 2022, 10, 275–285. [Google Scholar] [CrossRef]
- Wang, R.; Xing, J.; Wang, P.; Wang, C. Research Review on Multi-Agent Cooperative Control of Ground Unmanned Systems. J. Dyn. Control. 2016, 14, 97–108. [Google Scholar]
- Ferreira, B.A.; Petrović, T.; Orsag, M.; Dios, J.R.F.; Bogdan, S. Distributed allocation and scheduling of tasks with cross-schedule dependencies for heterogeneous multi-robot teams. IEEE Access 2024, 12, 74327–74342. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, D. Distributed Imaging Satellite Mission Planning Based on Multi-Agent. IEEE Access 2023, 11, 65530–65545. [Google Scholar] [CrossRef]
- Skrzypczyk, K. Game theory based task planning in multi-robot systems. Int. J. Simul. 2005, 6, 50–60. [Google Scholar]
- Martin, M.; Lyke, J. Modular Open Network ARCHitecture (MONARCH): Transitioning plug-and-play to aerospace. In Proceedings of the Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013. [Google Scholar]
- Chen, Q.; Wu, W.; Dai, J. Research on Distributed Autonomous Configuration Maintenance Planning of Satellite Systems Based on Multi-Agent Negotiation. J. Astronaut. 2008, 29, 517–521. [Google Scholar]
- Wang, C.; Li, J.; Jing, N.; Wang, J.; Chen, H. A Distributed Cooperative Dynamic Task Planning Algorithm for Multiple Satellites Based on Multi-agent Hybrid Learning. Chin. J. Aeronaut. 2011, 24, 493–505. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, D.; Hao, Y. Distributed Online Algorithm for Multi-Agent Space Pursuit-Evasion Mission Planning. J. Aeronaut. China 2016, 29, 1709–1720. [Google Scholar] [CrossRef]
- Zheng, Z.; Guo, J.; Gill, E. Distributed onboard mission planning for multi-satellite systems. Aerosp. Sci. Technol 2019, 89, 111–122. [Google Scholar] [CrossRef]
- Kim, M.H.; Baik, H.; Lee, S. Response threshold model based UAV search planning and task allocation. Intell. Robot. Syst. 2014, 75, 625–637. [Google Scholar] [CrossRef]
- Pei, J.; Li, L. Research on Distributed Cooperative Optimization Algorithm for Satellite Task Planning. Aerosp. Eng. 2020, 47, 231–238. [Google Scholar]
- Fei, H.; Zhang, X.; Long, J. Towards Multi-Satellite Collaborative Computing via Task Scheduling Based on Genetic Algorithm. Aerospace 2023, 10, 95. [Google Scholar] [CrossRef]
- Wang, Z. Research on Dynamics Modeling and Control of Distributed Satellites. Ph.D. Thesis, University of National Defense Science and Technology, Changsha, China, 2006. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Semi-Major Axis (km) | Eccentricity | Inclination (deg) | Right Ascension of Ascending Node (deg) | Argument of Perigee (deg) | Mean Anomaly (deg) |
|---|---|---|---|---|---|---|
| X | 42,464.169 | 0 | 0 | 0 | 0 | 136.500 |
| D1 | 42,464.169 | 0 | 0 | 0 | 0 | 136.542 |
| D2 | 42,464.169 | 0 | 0 | 0 | 0 | 136.565 |
| ID | Mission Scenario | Mission Parameter Settings |
|---|---|---|
| A1 | Scenario 1 | |
| A2 | Scenario 2 |
| ID | Semi-Major Axis (km) | Eccentricity | Inclination (deg) | Right Ascension of Ascending Node (deg) | Argument of Perigee (deg) | Mean Anomaly (deg) |
|---|---|---|---|---|---|---|
| A1 | 42,464.169 | 0 | 0 | 0 | 0 | 136.677 |
| A2 | 42,464.169 | 0 | 0 | 0 | 0 | 136.686 |
| Model | Name | Parameter Settings |
|---|---|---|
| Zebra Optimization Algorithm (ZOA) | Population size | 50 |
| Maximum number of iterations | 1000 | |
| Perturbation amplitude | 0.01 | |
| Co-evolution | Number of evolutionary rounds | 20 |
| Comprehensive effectiveness evaluation | Detection success rate | 0.25 |
| Fuel consumption | 0.25 | |
| Mission time cost | 0.25 | |
| Target coverage degree | 0.25 |
| Mission Duration | Intelligent Satellites | Detection Satellites | ||||
|---|---|---|---|---|---|---|
| ID | Impulse Magnitude (m/s) | Number of Impulses | ID | Impulse Magnitude (m/s) | Number of Impulses | |
| 125,580 | 1 | 25.08307 | 28 | 1 | 12.61028 | 23 |
| 116,500 | 2 | 20.99062 | 30 | 2 | 6.08755 | 27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.; Wang, J.; Xu, X.; Yuan, Q.; Wang, P.; Zhou, D. Research on Distributed Collaborative Task Planning and Countermeasure Strategies for Satellites Based on Game Theory Driven Approach. Remote Sens. 2025, 17, 2640. https://doi.org/10.3390/rs17152640
Gao H, Wang J, Xu X, Yuan Q, Wang P, Zhou D. Research on Distributed Collaborative Task Planning and Countermeasure Strategies for Satellites Based on Game Theory Driven Approach. Remote Sensing. 2025; 17(15):2640. https://doi.org/10.3390/rs17152640
Chicago/Turabian StyleGao, Huayu, Junqi Wang, Xusheng Xu, Qiufan Yuan, Pei Wang, and Daming Zhou. 2025. "Research on Distributed Collaborative Task Planning and Countermeasure Strategies for Satellites Based on Game Theory Driven Approach" Remote Sensing 17, no. 15: 2640. https://doi.org/10.3390/rs17152640
APA StyleGao, H., Wang, J., Xu, X., Yuan, Q., Wang, P., & Zhou, D. (2025). Research on Distributed Collaborative Task Planning and Countermeasure Strategies for Satellites Based on Game Theory Driven Approach. Remote Sensing, 17(15), 2640. https://doi.org/10.3390/rs17152640