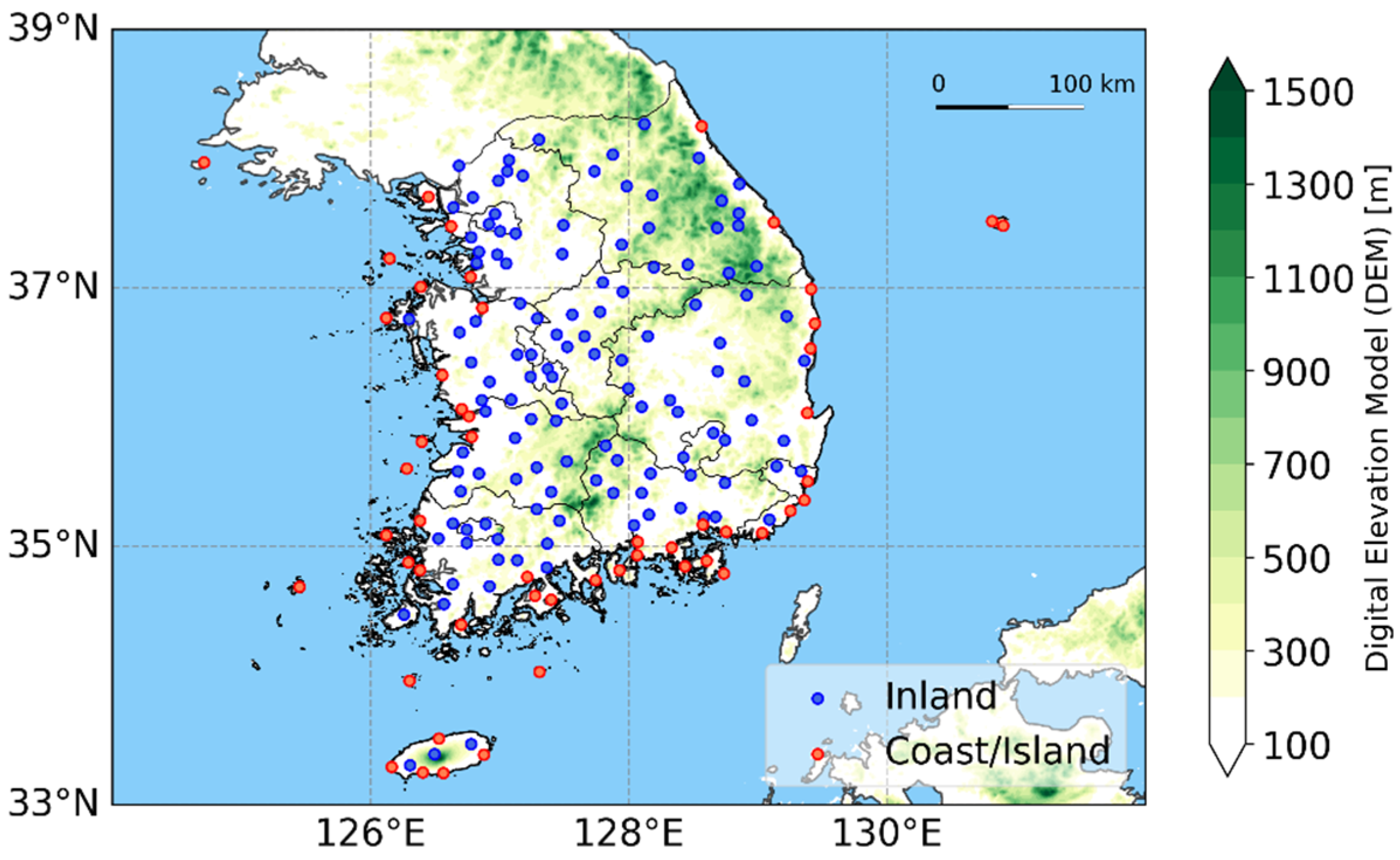
Figure 1.
The spatial distribution of 176 visibility meter locations was used for the evaluation of the GK2A fog product. A total of 124 visibility meters in the inland area are represented by blue circles, and 52 visibility meters in the coastal area are represented by red circles based on the GK2A fog land-sea mask.
Figure 1.
The spatial distribution of 176 visibility meter locations was used for the evaluation of the GK2A fog product. A total of 124 visibility meters in the inland area are represented by blue circles, and 52 visibility meters in the coastal area are represented by red circles based on the GK2A fog land-sea mask.
Figure 2.
A simplified data flow chart of the GK2A_FDA (see Han et al. [
28] for details). BTD: brightness temperature difference; DCD: dual channel difference; NLSD: normalized local standard deviation; ∆FTs: difference between the brightness temperature (BT) of the fog top and the surface temperature (CSR_BT
11.2µm−BT
11.2µm, where CSR_BT
11.2µm is the clear-sky radiance brightness temperature at 11.2 μm); ∆VIS
0.64μm: the difference between normalized 0.64 μm reflectance and its surface reflectance background at 0.64 μm.
Figure 2.
A simplified data flow chart of the GK2A_FDA (see Han et al. [
28] for details). BTD: brightness temperature difference; DCD: dual channel difference; NLSD: normalized local standard deviation; ∆FTs: difference between the brightness temperature (BT) of the fog top and the surface temperature (CSR_BT
11.2µm−BT
11.2µm, where CSR_BT
11.2µm is the clear-sky radiance brightness temperature at 11.2 μm); ∆VIS
0.64μm: the difference between normalized 0.64 μm reflectance and its surface reflectance background at 0.64 μm.
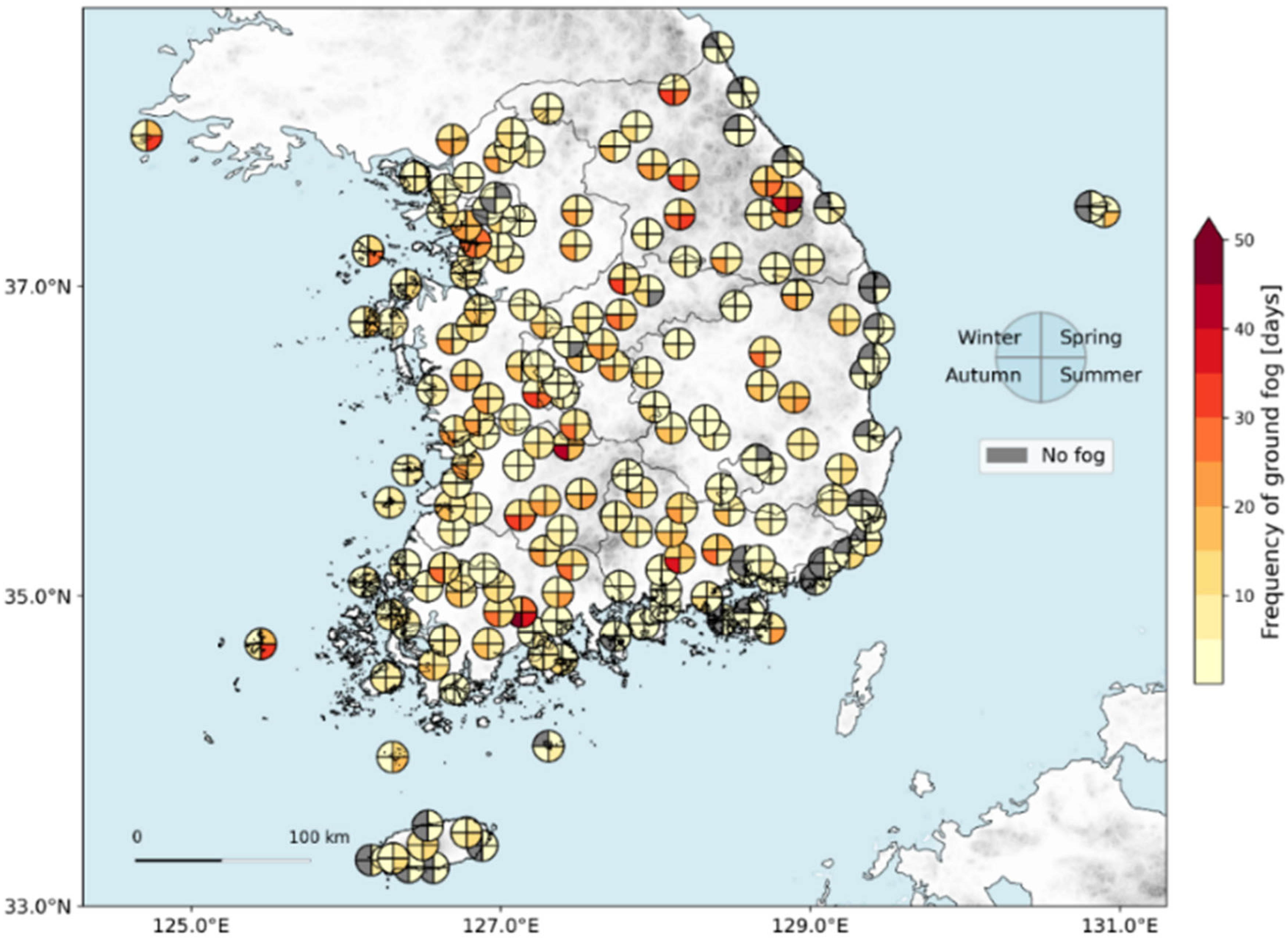
Figure 3.
The average annual number of fog occurrence days by season during 2021–2023 at 176 visibility meter stations. The quartered circular markers represent the seasonal fog frequency at each observation site. Each quadrant corresponds to a specific season in a clockwise order, starting from the top right corner: spring, summer, autumn, and winter.
Figure 3.
The average annual number of fog occurrence days by season during 2021–2023 at 176 visibility meter stations. The quartered circular markers represent the seasonal fog frequency at each observation site. Each quadrant corresponds to a specific season in a clockwise order, starting from the top right corner: spring, summer, autumn, and winter.
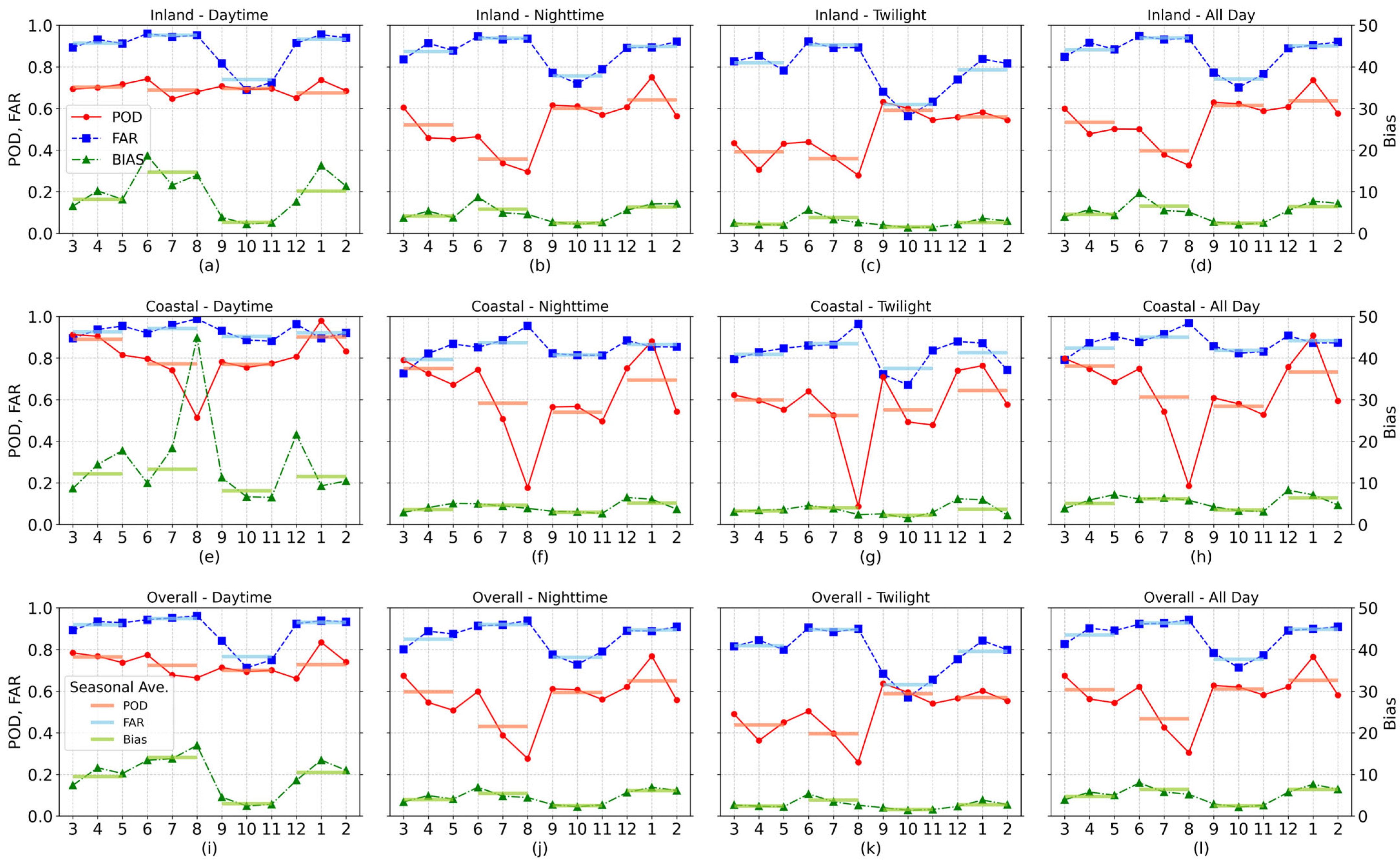
Figure 4.
Monthly and seasonal average detection performance (POD, FAR, and bias) of the GK2A_FDA over three years (2021–2023), categorized by time (daytime, nighttime, twilight) and geographic region (inland, coastal, overall). (a) Inland—Daytime, (b) Inland—Nighttime, (c) Inland—Twilight, (d) Inland—All Day, (e) Coastal—Daytime, (f) Coastal—Nighttime, (g) Coastal—Twilight, (h) Coastal—All Day, (i) Overall—Daytime, (j) Overall—Nighttime, (k) Overall—Twilight, (l) Overall—All Day.
Figure 4.
Monthly and seasonal average detection performance (POD, FAR, and bias) of the GK2A_FDA over three years (2021–2023), categorized by time (daytime, nighttime, twilight) and geographic region (inland, coastal, overall). (a) Inland—Daytime, (b) Inland—Nighttime, (c) Inland—Twilight, (d) Inland—All Day, (e) Coastal—Daytime, (f) Coastal—Nighttime, (g) Coastal—Twilight, (h) Coastal—All Day, (i) Overall—Daytime, (j) Overall—Nighttime, (k) Overall—Twilight, (l) Overall—All Day.
Figure 5.
Monthly distribution of GK2A fog detection and ground fog occurrence frequency according to SZA at 4° intervals. The range of SZA changes with the month because SZA changes with the season. Daytime is defined as SZA < 80°, twilight as 80° ≤ SZA < 88°, and nighttime as SZA ≥ 88°. The data represent the annual frequency at 10 min intervals from 2021 to 2023. Missing bias values in low SZA bins indicate either no ground fog observations or values exceeding the axis range.
Figure 5.
Monthly distribution of GK2A fog detection and ground fog occurrence frequency according to SZA at 4° intervals. The range of SZA changes with the month because SZA changes with the season. Daytime is defined as SZA < 80°, twilight as 80° ≤ SZA < 88°, and nighttime as SZA ≥ 88°. The data represent the annual frequency at 10 min intervals from 2021 to 2023. Missing bias values in low SZA bins indicate either no ground fog observations or values exceeding the axis range.
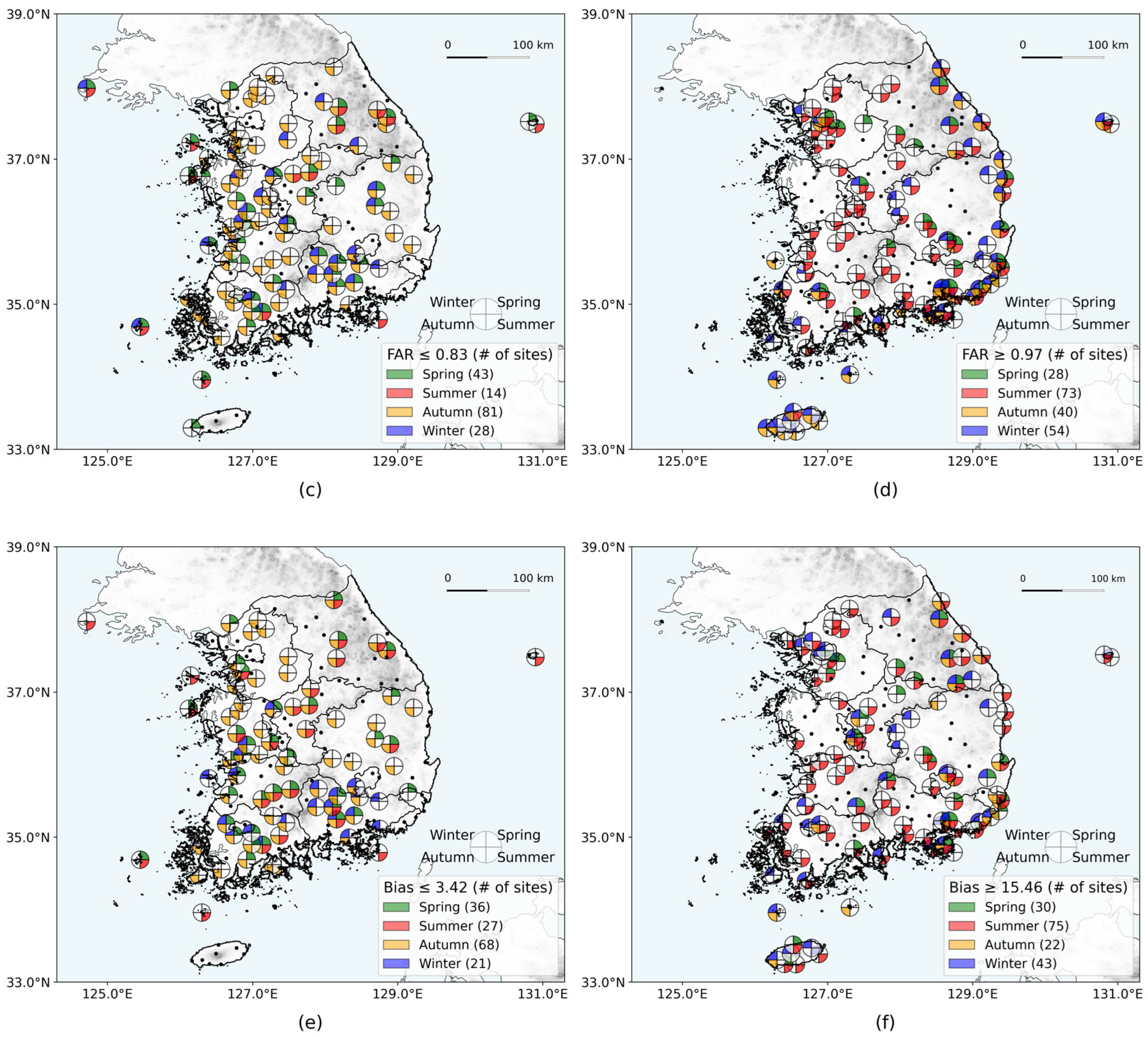
Figure 6.
Spatial distribution of visibility meter stations classified by the top and bottom 25% of seasonal frequency for GK2A fog detection performance: (a) POD ≥ 0.78 (top 25%), (b) POD ≤ 0.43 (bottom 25%), (c) FAR ≤ 0.83 (top 25%), (d) FAR ≥ 0.97 (bottom 25%), (e) bias ≤ 3.42 (top 25%), (f) bias ≥ 15.46 (bottom 25%). Quartered circular markers are displayed only at locations where the corresponding POD, FAR, or Bias values meet the specified thresholds.
Figure 6.
Spatial distribution of visibility meter stations classified by the top and bottom 25% of seasonal frequency for GK2A fog detection performance: (a) POD ≥ 0.78 (top 25%), (b) POD ≤ 0.43 (bottom 25%), (c) FAR ≤ 0.83 (top 25%), (d) FAR ≥ 0.97 (bottom 25%), (e) bias ≤ 3.42 (top 25%), (f) bias ≥ 15.46 (bottom 25%). Quartered circular markers are displayed only at locations where the corresponding POD, FAR, or Bias values meet the specified thresholds.
Figure 7.
A time series analysis of the formation, development, and dissipation processes of radiation fog at Suwon located in the south-central region of Gyeonggi Province, South Korea, using (a) GK2A fog detection imagery, (b) fog detection result and ground visibility data, (c) GK2A cloud top height and ceilometer observations, and (d) ASOS meteorological data (period: 15:00 LST on 28 September to 15:00 on 29 September 2022).
Figure 7.
A time series analysis of the formation, development, and dissipation processes of radiation fog at Suwon located in the south-central region of Gyeonggi Province, South Korea, using (a) GK2A fog detection imagery, (b) fog detection result and ground visibility data, (c) GK2A cloud top height and ceilometer observations, and (d) ASOS meteorological data (period: 15:00 LST on 28 September to 15:00 on 29 September 2022).
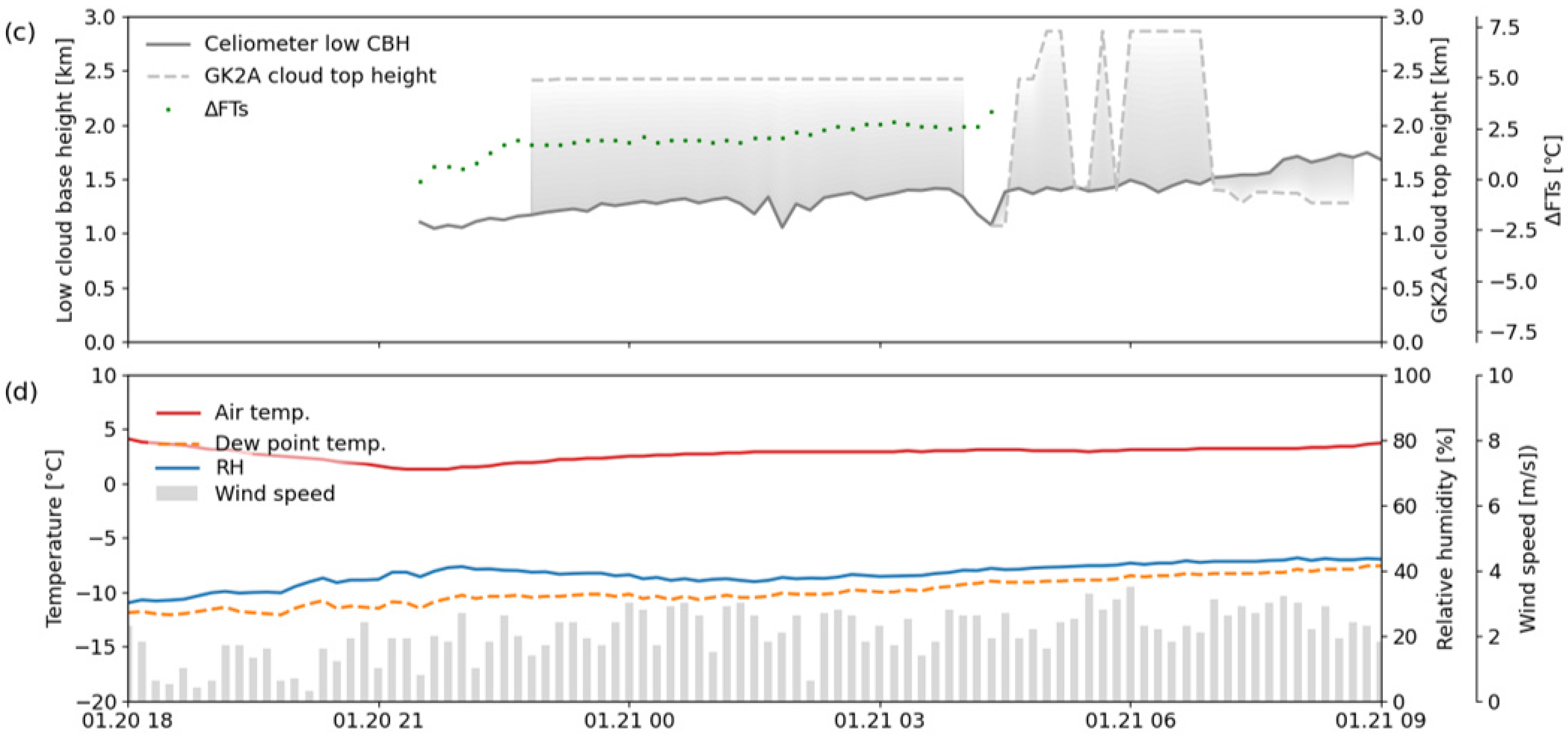
Figure 8.
A time series analysis of low stratus cases at Seoul using (a) GK2A fog detection imagery, (b) fog detection result and ground visibility data, (c) GK2A cloud-top height and ceilometer observations, and (d) ASOS meteorological data (period: 18:00 LST on 20 January 2021 to 09:00 LST on 21 January 2021).
Figure 8.
A time series analysis of low stratus cases at Seoul using (a) GK2A fog detection imagery, (b) fog detection result and ground visibility data, (c) GK2A cloud-top height and ceilometer observations, and (d) ASOS meteorological data (period: 18:00 LST on 20 January 2021 to 09:00 LST on 21 January 2021).
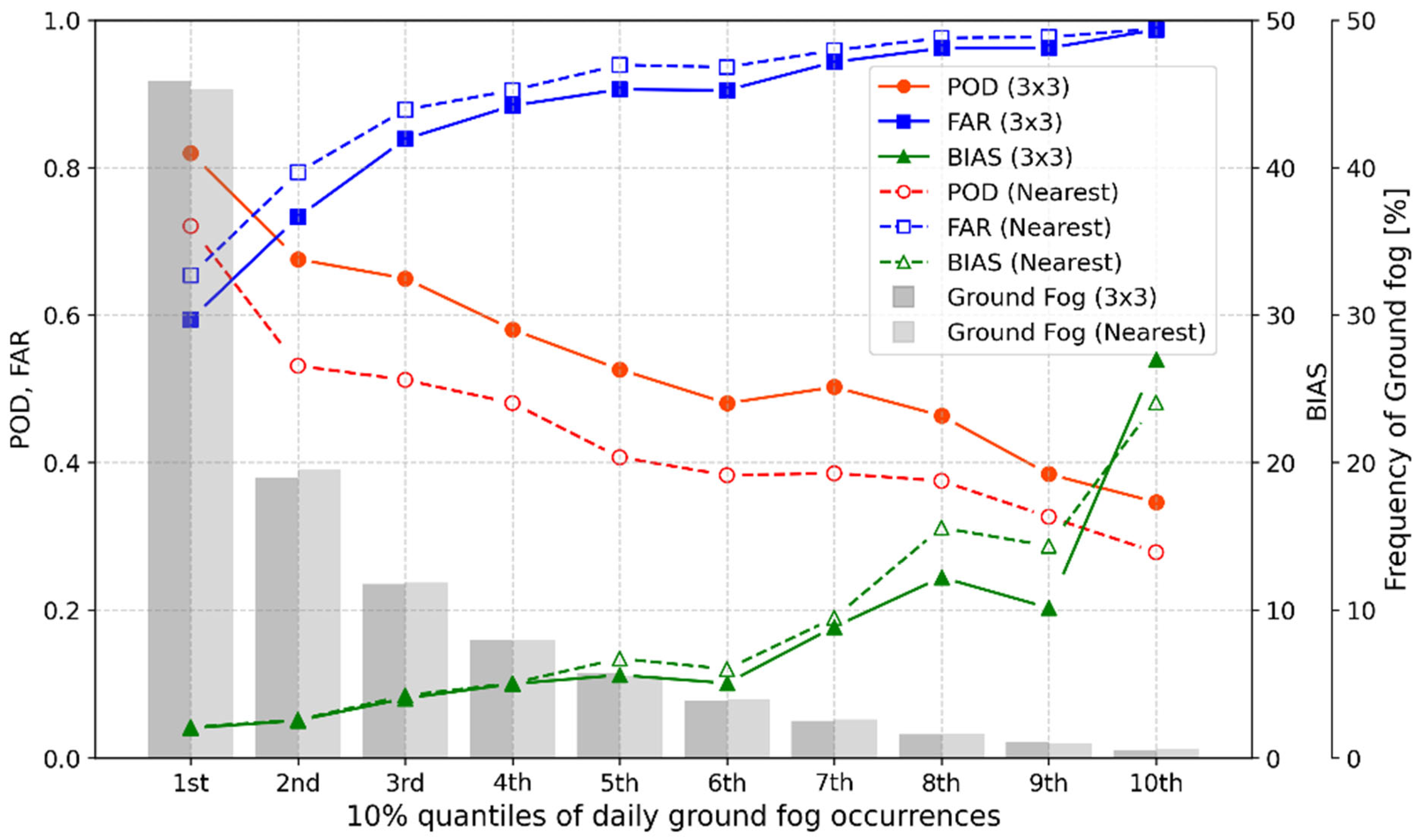
Figure 9.
The distribution of GK2A_FDA POD, FAR, and bias based on the 10% quantiles of daily ground fog occurrences from 2021 to 2023. The dashed and solid lines indicate that validation was performed by the nearest pixel and 3 × 3 neighborhood pixel methods, respectively.
Figure 9.
The distribution of GK2A_FDA POD, FAR, and bias based on the 10% quantiles of daily ground fog occurrences from 2021 to 2023. The dashed and solid lines indicate that validation was performed by the nearest pixel and 3 × 3 neighborhood pixel methods, respectively.
Figure 10.
Monthly fog occurrence frequency detected by the visibility meter and GK2A_FDA (10 min interval) (2021–2023): (a) inland area, (b) coastal area.
Figure 10.
Monthly fog occurrence frequency detected by the visibility meter and GK2A_FDA (10 min interval) (2021–2023): (a) inland area, (b) coastal area.
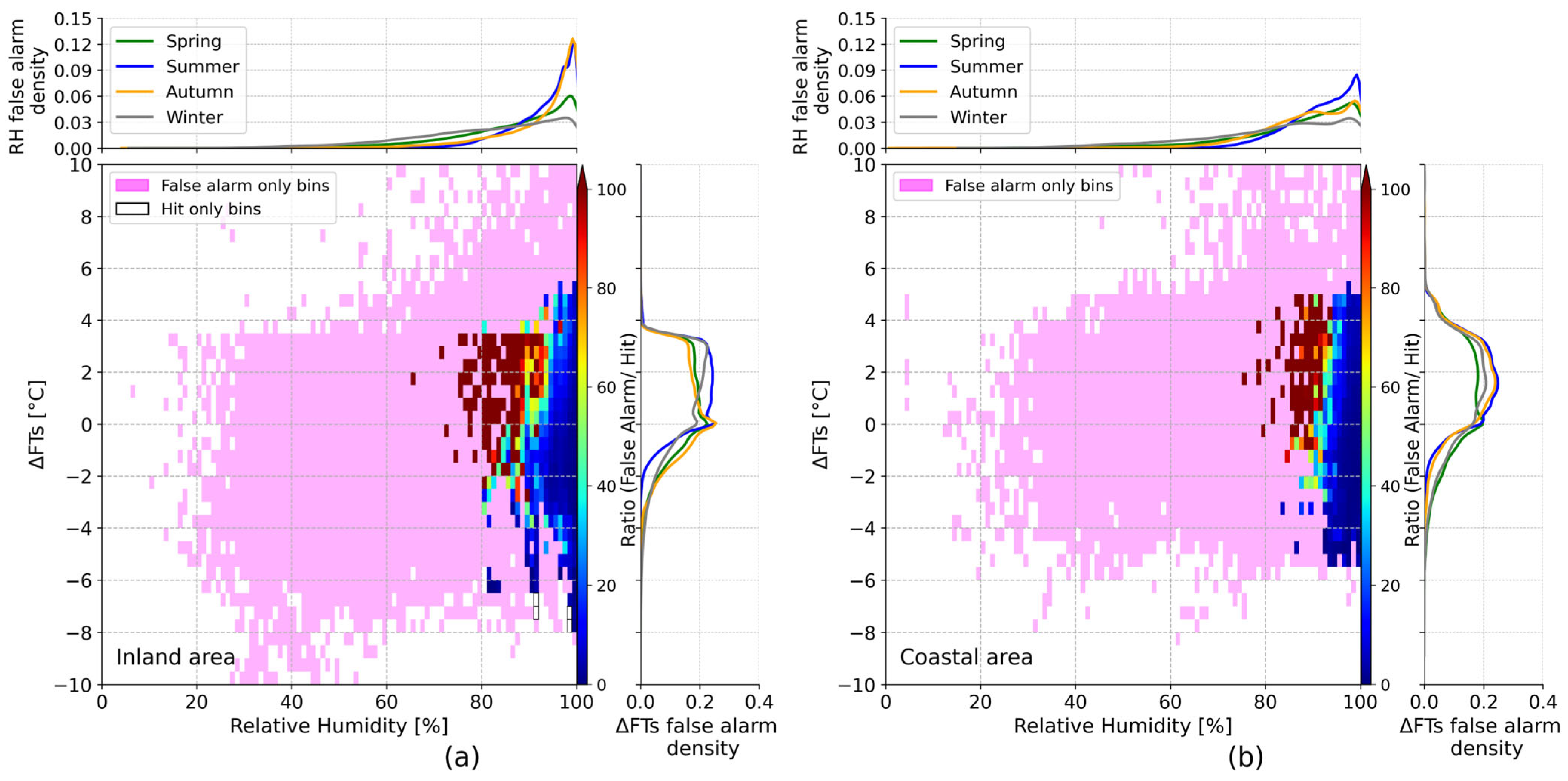
Figure 11.
Ratio distribution of false alarm counts to hit counts according to relative humidity and ΔFTs over (a) inland area and (b) coastal area, along with the frequency distribution of relative humidity (top) and ΔFTs (right) for each bin. The pink-shaded bins highlight zones of false alarm occurrences without corresponding hits in the GK2A fog detection.
Figure 11.
Ratio distribution of false alarm counts to hit counts according to relative humidity and ΔFTs over (a) inland area and (b) coastal area, along with the frequency distribution of relative humidity (top) and ΔFTs (right) for each bin. The pink-shaded bins highlight zones of false alarm occurrences without corresponding hits in the GK2A fog detection.
Figure 12.
Ratio distribution of false alarm counts to hit counts according to relative humidity and SZA over (a) inland area and (b) coastal area, along with the frequency distribution of GK2A false detections by SZA bin (left).
Figure 12.
Ratio distribution of false alarm counts to hit counts according to relative humidity and SZA over (a) inland area and (b) coastal area, along with the frequency distribution of GK2A false detections by SZA bin (left).
Table 1.
Data used in the evaluation of the GK2A fog detection algorithm.
Table 1.
Data used in the evaluation of the GK2A fog detection algorithm.
| Data | Variables [Unit] | Spatial Resolution | Temporal Resolution | Remarks |
|---|
| GK2A Fog | Fog, cloud, clear, etc. | 2 km | 10 min | |
| Land sea mask | Land, sea, coast | 2 km | - | |
| Visibility Meter | Visibility [m] | - | 1 min | |
| ASOS/AWS | Relative humidity [%],
temperature [°C],
wind speed [m s−1] | - | 1 min | Case study |
| Ceilometer | Low cloud base height [m] | 10 m * | 10 min | Case study |
| GK2A Cloud Product | Cloud top height [m] | 2 km | 10 min | Case study |
Table 2.
Summary of GK2A fog detection product.
Table 2.
Summary of GK2A fog detection product.
| Number | GK2A Fog Product | Remarks |
|---|
| 1 | Clear sky | - |
| 2 | Middle/high cloud | - |
| 3 | Unknown | Partially satisfy the fog criteria |
| 4 | Probably fog | - |
| 5 | Fog | - |
| 6 | Snow | - |
| 7 | Desert or semi-desert | Prefixed by land use |
Table 3.
2 × 2 contingency table for the evaluation of the GK2A_FDA.
Table 3.
2 × 2 contingency table for the evaluation of the GK2A_FDA.
| | Ground Observation Fog (Visibility Meters) |
|---|
| Fog | | Non-Fog |
|---|
GK2A
Fog | The nearest pixel | Fog | Hits (H) | | False alarms (F) |
| Non-fog | Misses (M) | | Correct negative (C) |
| 3 × 3 Neighborhood Pixel | ≥1 | Hits (H) | ≥5 | False alarms (F) |
| =0 | Misses (M) | <5 | Correct negative (C) |
Table 4.
Proportion of quality flags in GK2A fog detection product at visibility meter stations, 2021–2023 (Flag 0: nominal, Flags 1–13: some channel data or previous time data missing, Flag 14: snow-contaminated, Flag 15: cloud-contaminated). The total scene count is 156,369.
Table 4.
Proportion of quality flags in GK2A fog detection product at visibility meter stations, 2021–2023 (Flag 0: nominal, Flags 1–13: some channel data or previous time data missing, Flag 14: snow-contaminated, Flag 15: cloud-contaminated). The total scene count is 156,369.
| Flag | 0 | 1~13 | 14 | 15 |
|---|
| Proportion [%] | 52.90 | 0.02 | 3.73 | 43.34 |
Table 5.
Overall performance of the GK2A fog detection algorithm by year (2021, 2022, 2023) and validation method (nearest pixel, 3 × 3 neighborhood pixel).
Table 5.
Overall performance of the GK2A fog detection algorithm by year (2021, 2022, 2023) and validation method (nearest pixel, 3 × 3 neighborhood pixel).
| GK2A Fog | Year | POD | FAR | Bias |
|---|
| The nearest pixel | 2021 | 0.58 | 0.84 | 3.61 |
| 2022 | 0.59 | 0.88 | 5.13 |
| 2023 | 0.59 | 0.86 | 4.14 |
| Ave. | 0.59 | 0.86 | 4.25 |
| 3 × 3 neighborhood pixel | 2021 | 0.69 | 0.77 | 3.04 |
| 2022 | 0.71 | 0.85 | 4.61 |
| 2023 | 0.70 | 0.81 | 3.70 |
| Ave. | 0.70 | 0.81 | 3.73 |
Table 6.
Summary of GK2A fog detection performance by region and time. Overall represents the combined statistics for inland and coastal regions.
Table 6.
Summary of GK2A fog detection performance by region and time. Overall represents the combined statistics for inland and coastal regions.
| Period | Inland | Coastal | Overall |
|---|
| POD | FAR | Bias | POD | FAR | Bias | POD | FAR | Bias |
|---|
| Day | 0.69 | 0.89 | 6.12 | 0.83 | 0.93 | 11.93 | 0.72 | 0.90 | 7.34 |
| Night | 0.55 | 0.86 | 3.86 | 0.64 | 0.84 | 3.99 | 0.57 | 0.85 | 3.89 |
| Twilight | 0.51 | 0.77 | 2.21 | 0.57 | 0.83 | 3.33 | 0.52 | 0.78 | 2.36 |
| All day | 0.57 | 0.86 | 4.00 | 0.67 | 0.87 | 5.26 | 0.59 | 0.86 | 4.25 |
Table 7.
Summary of GK2A fog detection performance by season.
Table 7.
Summary of GK2A fog detection performance by season.
| Season | POD | FAR | Bias |
|---|
| Spring | 0.61 | 0.87 | 4.72 |
| Summer | 0.47 | 0.93 | 6.44 |
| Autumn | 0.61 | 0.75 | 2.48 |
| Winter | 0.65 | 0.90 | 6.43 |
Table 8.
GK2A_FDA performance by the nearest pixel for individual scenes during the radiation fog event (03:00–09:00 LST on 29 September 2022, in
Figure 7a).
Table 8.
GK2A_FDA performance by the nearest pixel for individual scenes during the radiation fog event (03:00–09:00 LST on 29 September 2022, in
Figure 7a).
| Date (LST) | POD | FAR | Bias |
|---|
| 29 September 2022, 03:00 | 0.94 | 0.36 | 1.46 |
| 29 September 2022, 06:00 | 0.97 | 0.36 | 1.51 |
| 29 September 2022, 09:00 | 0.82 | 0.66 | 2.41 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}