3.1. Existing Methods
Conventional Doppler frequency estimation algorithms typically apply global FF’T to SoOP to obtain a coarse preliminary estimate (
), reprocessing this estimate with parametric refinement algorithms to compensate spectral leakage in the FFT results (
), as illustrated in
Figure 11. The Rife–Vincent algorithm and MLE method are the most widely used in this latter step because of their balanced computational efficiency.
The Rife–Vincent algorithm first determines the direction (sign) of the necessary frequency compensation from spectral lines adjacent to the FFT peak, as in Equation (1), and then calculates its magnitude using Equation (2) [
21]:
where
a is the Rife–Vincent compensation direction,
is the result of
-point FFT,
is the index of the FFT peak (spectral line with maximum
value),
is the sampling frequency, and
is the frequency offset factor previously mentioned, which characterizes the frequency difference between the FFT peak and the true signal.
Substantial Doppler frequency variations in the Iridium NEXT system modify the frequency offset factor
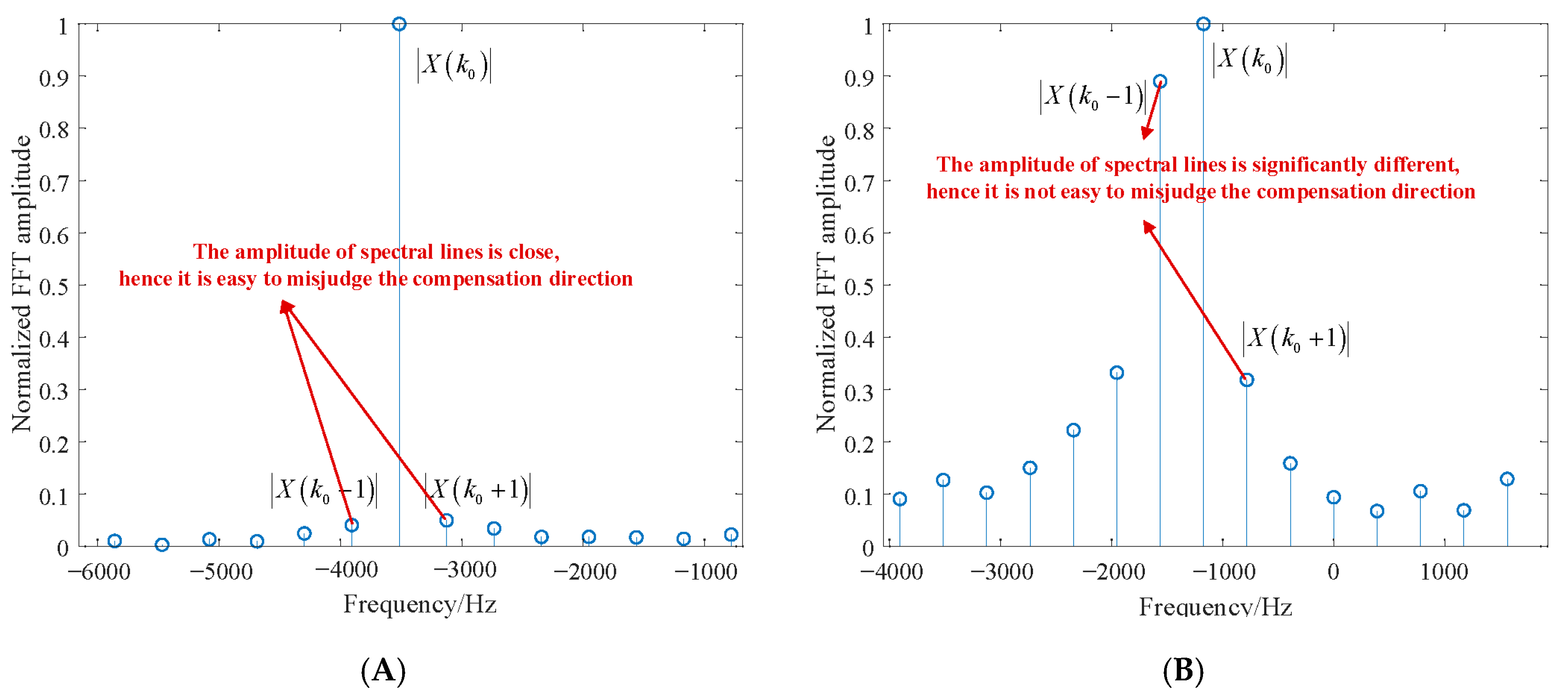
δ unpredictably, with strong performance degradation of the Rife–Vincent algorithm for small values. If the true signal frequency is nearly equal to that of an FFT sampling point,
δ is small, and the
values are considerably smaller than
but approximately equal to each other (
Figure 12A). Under such conditions, noise interference can cause directional frequency compensation errors that strongly reduce the Doppler frequency estimation accuracy. Conversely, if the true signal frequency is approximately equidistant from adjacent FFT sampling points,
δ is larger, and one of the
values are comparable with
but markedly larger than the other (
Figure 12B). Under such conditions, the probability of directional errors in the Rife–Vincent compensation markedly decreases, and the estimation accuracy remains excellent.
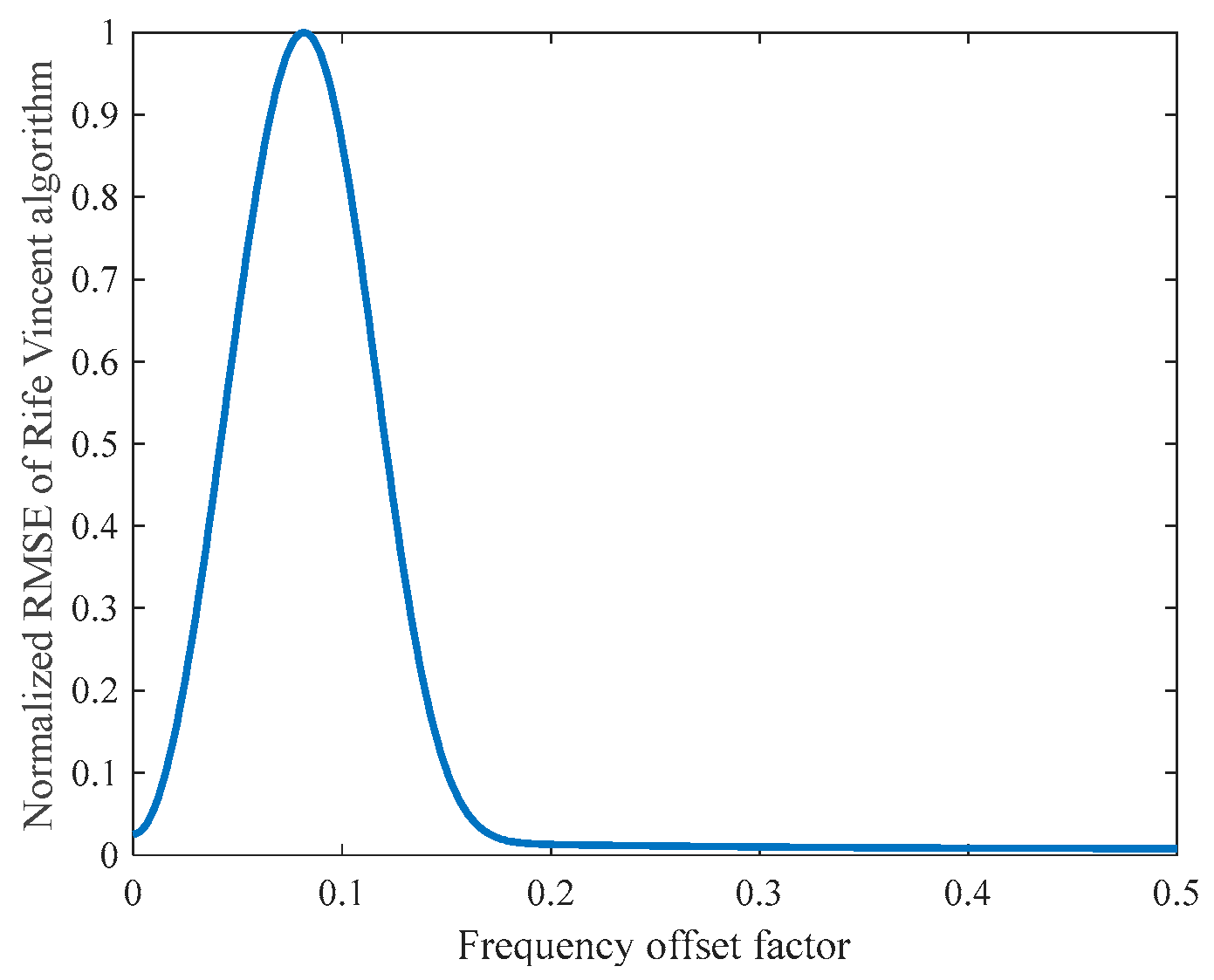
The theoretical RMSE of the Rife–Vincent algorithm with different
δ can be expressed as:
where
,
, and
are the sampling frequency, number of FFT points, and
SNR.
Figure 13 demonstrates the normalized RMSE of the Rife–Vincent algorithm as a function of
δ (at
SNR = 0 dB). Performance degrades when
δ assumes smaller values.
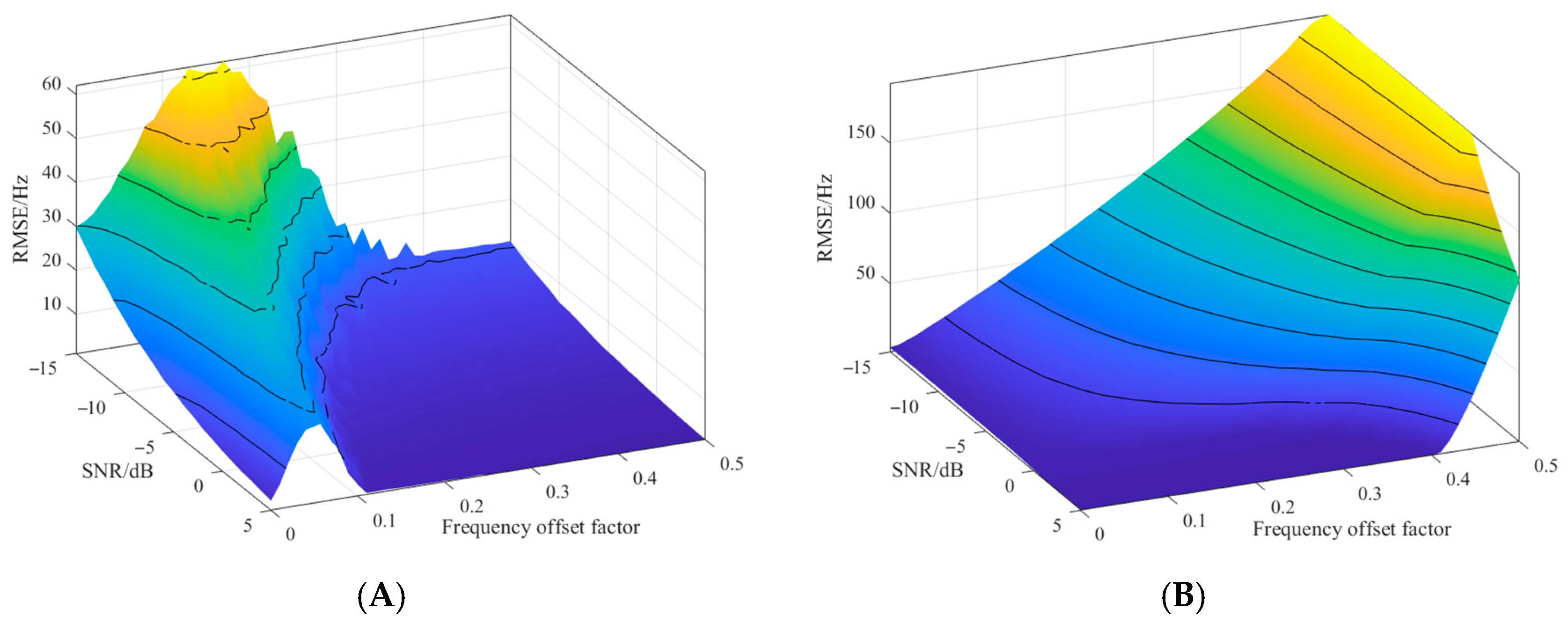
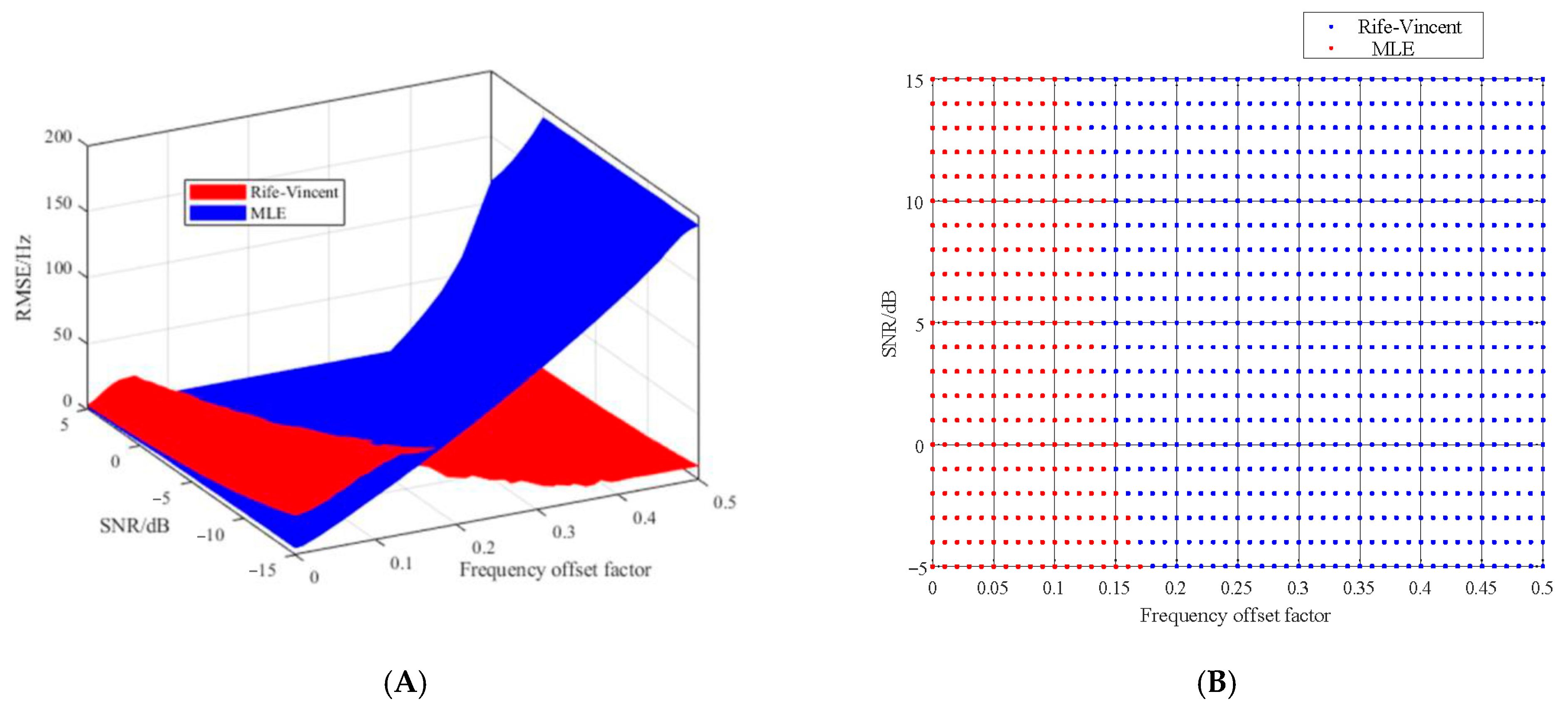
Figure 14A illustrates the sharp decrease in the Rife–Vincent algorithm accuracy (sharp RMSE increase) for small
δ values, which is particularly large at low SNR. This dual dependence on
δ and on the SNR defines the fundamental limitation of the Rife–Vincent algorithm for precise Doppler frequency estimation.
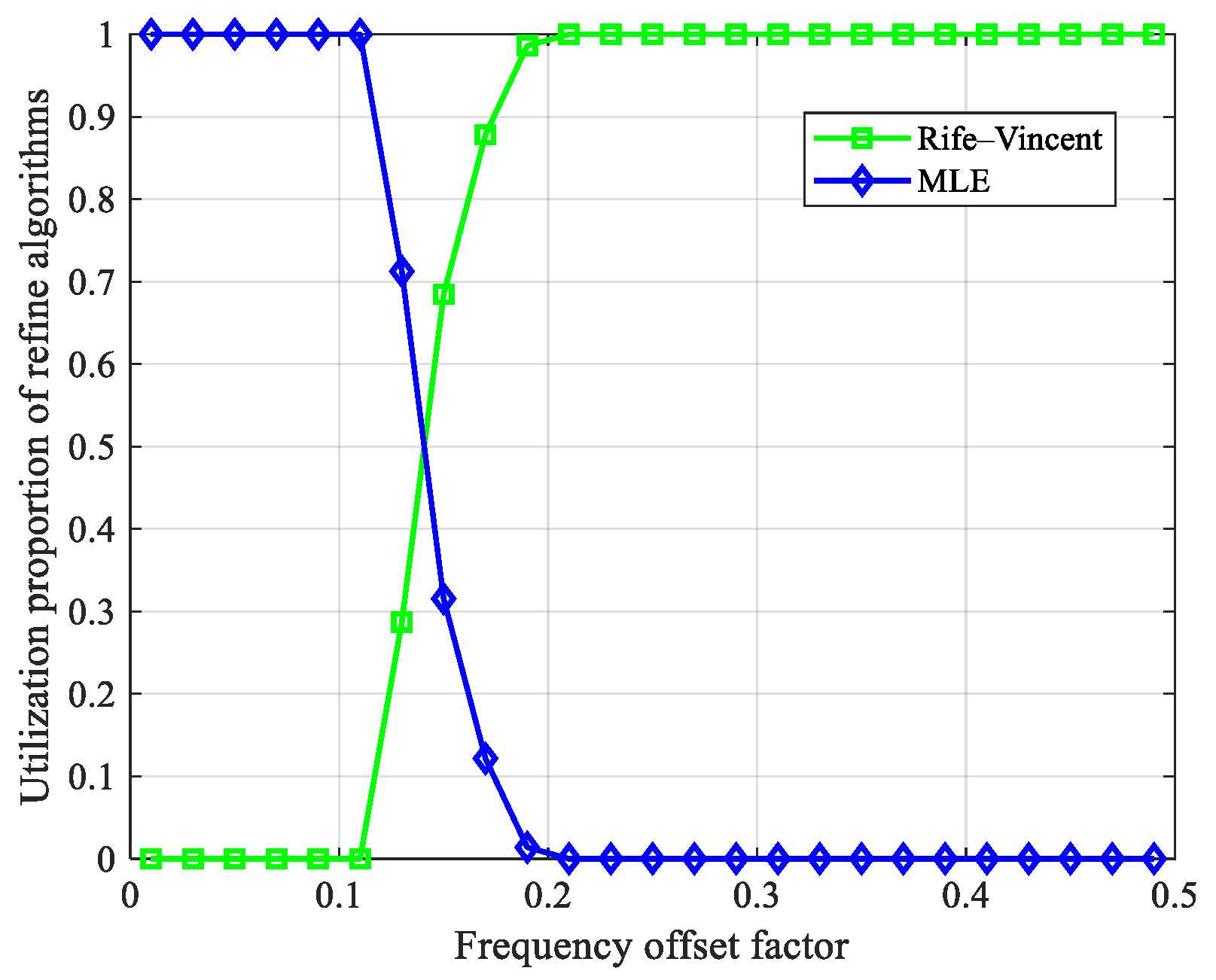
The MLE function is an unbiased estimator relying on the minimum RMSE of sampled points; its estimation accuracy strongly depends on sample quality. Consequently, MLE performance is highly sensitive to SNR fluctuations, exhibiting a sharp accuracy decrease under low-SNR conditions. Notably, because the MLE algorithm is a search-based method applied to the global FFT results, its performance also depends on the FFT estimation accuracy (
Figure 14B). For small δ values, the FFT itself achieves high estimation accuracy, ensuring robust MLE performance despite large SNR variations. Hence, because of the complementarity of their optimal applicability domains, combining the Rife–Vincent and MLE algorithms can provide comprehensive coverage of most Iridium NEXT operational conditions and mitigate the effects inherent to LEO satellite signals of both SNR fluctuations and Doppler frequency variations on SoOP positioning.
3.2. New Algorithm Proposal
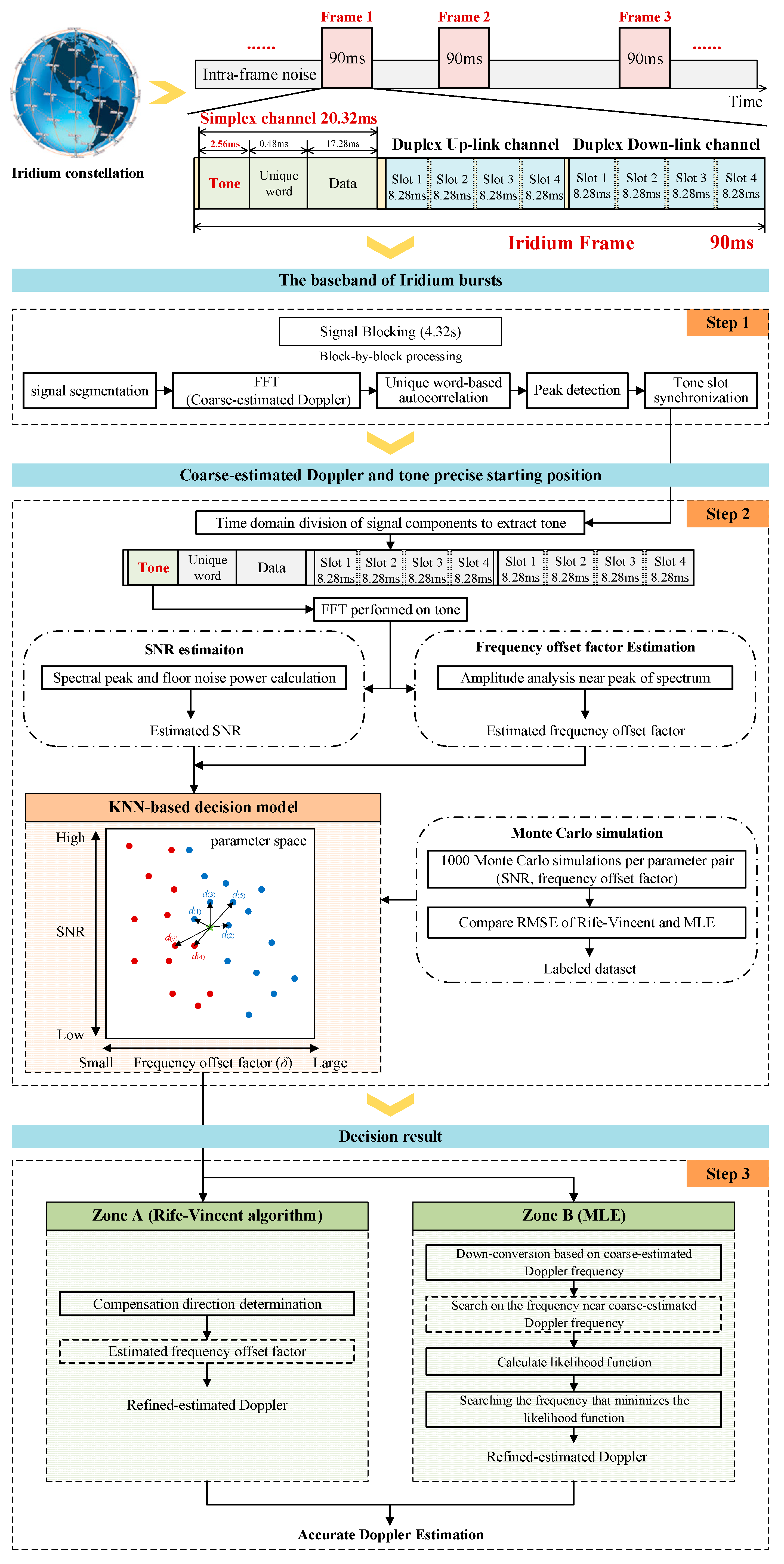
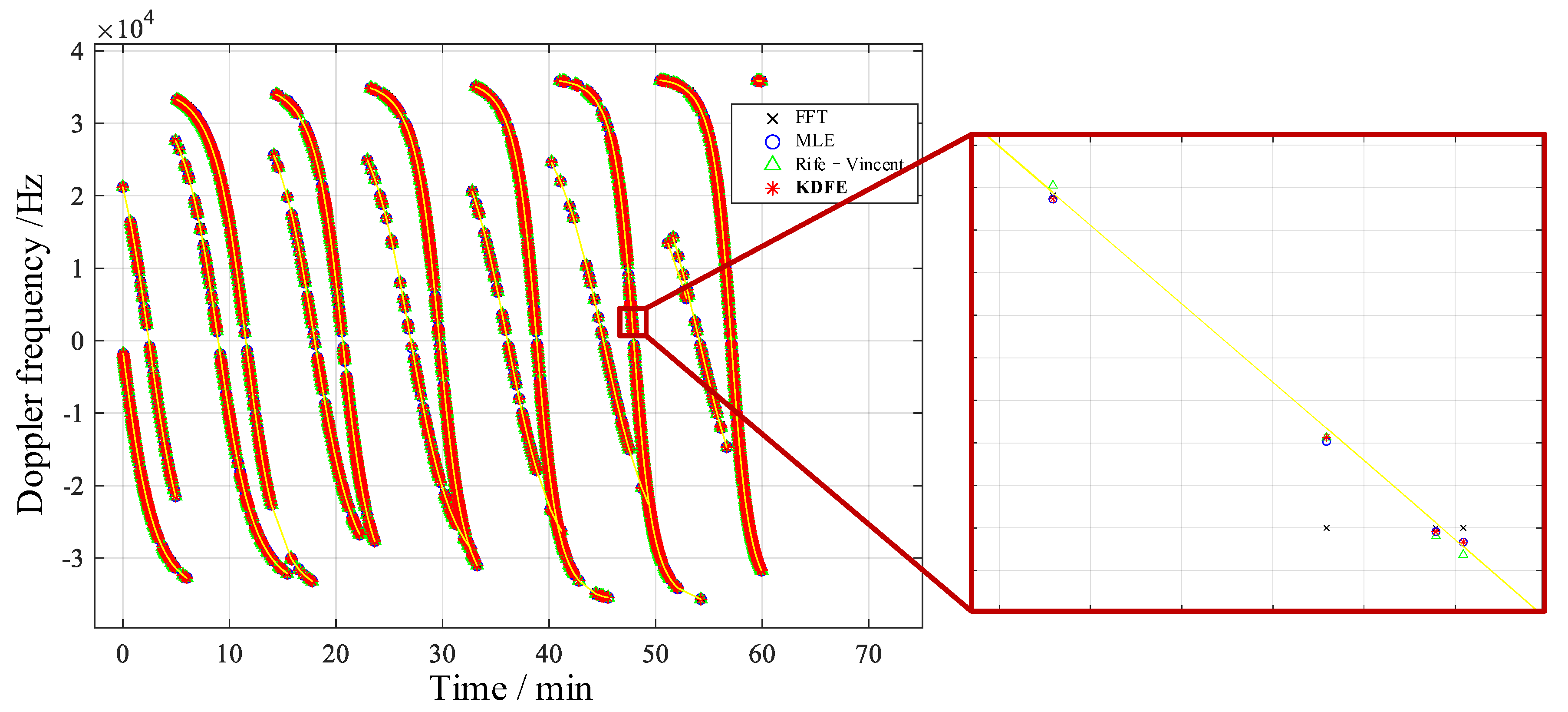
In this study, we propose a new algorithm, KDFE, for precise Doppler frequency estimation from Iridium NEXT tone signals. It consists of accounting for the SNR and
δ characteristics of individual Iridium NEXT tone signals through adaptive integration of the Rife–Vincent and MLE algorithms. By adaptively selecting a processing path optimally suited for each Iridium NEXT tone signal, the KDFE algorithm can achieve higher Doppler frequency estimation accuracy than existing methods. The KDFE algorithm architecture, illustrated in
Figure 15, includes three processing steps for each block. First, it performs a global FFT to determine the approximate position of Iridium frames, obtain a coarse Doppler frequency estimate (
), and precisely locate the Iridium tone signals. Second, two characteristic parameters are extracted: frequency offset factor and SNR. The KNN-based decision module selects the optimal fine Doppler frequency compensation algorithm based on these parameters. Third, the decision result is applied to compensate (
) for the coarse estimated Doppler frequency (
) using FFT, and the refined Doppler frequency estimation (
) is obtained.
In the first step, a global FFT is applied to the Iridium NEXT data. Because SoOP positioning requires a substantial volume of data acquired over long periods, an Iridium NEXT signal from the carrier wave has been removed (i.e., baseband signal).
can be expressed as some shorter, equal-duration blocks:
where
n is the index of the sampling points,
is the total number of blocks in the analyzed signal, and
and
are the signal and starting point for block
i, respectively. In subsequent processing steps, each block will serve as a standardized processing unit, undergoing independent computational operations to extract the corresponding observational parameters.
Because Iridium signals are discontinuous, the block is segmented into multiple segments, with each segment undergoing individual FFT processing (i.e., global FFT). Then the coarse location of the tone signal can be detected by analyzing the power output. Signal power for FFT segment
j in a block can be calculated as:
where
M is the total number of FFT segments in the processed block. The location and length of each tone signal within the block can be obtained by determining the
peak positions in the block. Then, the signal for this block can be expressed as:
where
and
denote the
r-th frame and its coarse starting time in the block, and
is the complex Gaussian white noise. As Equation (6) establishes, global FFT effectively separates frame signals from noise within each block of an Iridium NEXT baseband signal and provides preliminary Doppler frequency estimates (
) for all individual frames.
We compute the precise starting sampling point for each tone based on the estimated coarse positions of Iridium frames obtained from the previous step. Using the frame’s starting sample point as the reference (i.e., the tone’s starting sampling point), the expression of the
r-th frame can be written as:
where
denotes the starting point of the
r-th frame.
,
, and
denote the sample points marking the end of the tone, unique word, and data portion, respectively.
,
, and
denote the tone, unique word, and data portion of the
r-th frame, respectively. The
is an unmodulated signal, which can be written as:
where
and
denote the amplitude and initial phase of the tone.
denotes the sampling frequency. The
is modulated by BPSK, which can be written as:
where
and
denote the amplitude and initial phase of a unique word portion.
represents the number of sampling points per symbol.
is the vector of binary information code of a unique word, which is prior information that can be shown as:
The
is modulated by QPSK, which can be written as:
where
and
denote the amplitude and initial phase of a unique word portion.
and
are the vector of binary information code of
I and
Q.
Since the tone and unique word are the prior information, a signal containing both tone and unique word portions can be generated and sampled according to the sampling frequency. Then, calculating the cross-correlation function between the generated signal
and the frame signal, the point where the cross-correlation function reaches its maximum corresponds to the starting sample point of the tone. The starting sample point of the
r-th tone in a block can be calculated using the following equation:
where
denotes the cross-correlation function between the generated signal
and the frame signal
, and
denotes the number of sampling points of
.
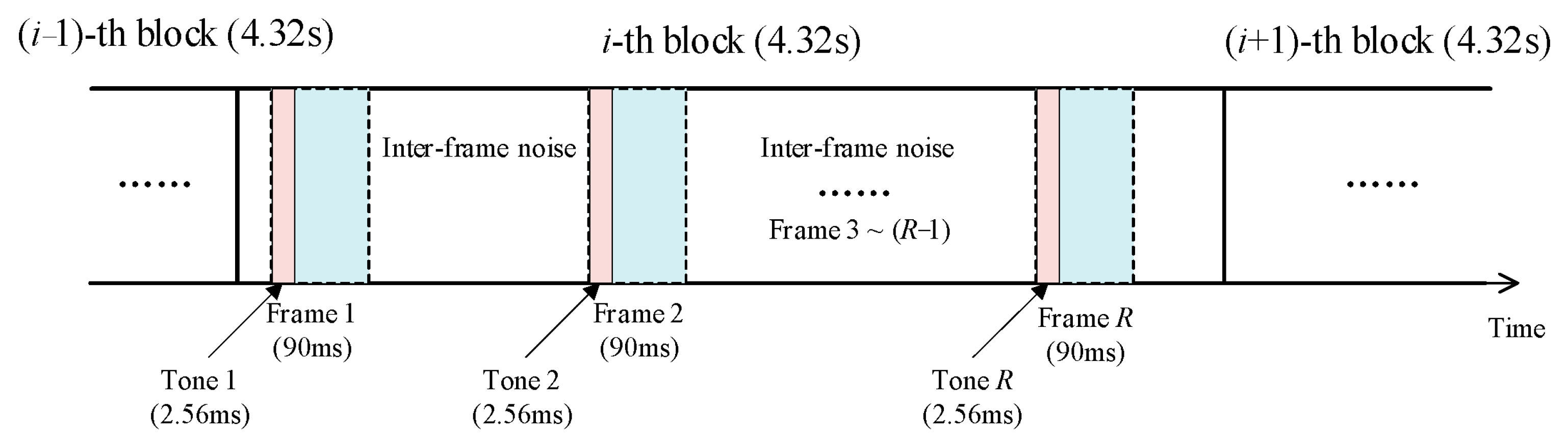
In the second step, as illustrated in
Figure 16, the precise localization of tone starting positions for each frame enables accurate partitioning of the block into three distinct components:
R tones (pink), intra-frame signals, excluding tones (blue), and inter-frame noise (white). The block can be decomposed into the three components as follows:
where
and
denote the number of points of one tone and a unique word, respectively.
denotes the inter-frame noise. To perform energy integration for the tone’s SNR calculation, an
-point FFT is applied to the extracted tone signal, yielding the frequency spectrum of the
r-th tone as
. Through analysis of the spectral peak and noise floor, the SNR of the
r-th tone can be estimated as:
where
denotes the maximal spectral line of
.
The frequency offset factor (
) of each tone can also be estimated from the
-point FFT, which is performed on the
r-th tone:
where
represents the FFT spectrum corresponding to the
r-th tone in the first step, and
denotes the index of its maximum spectral line of the
r-th tone’s spectrum.
Once the
SNR and
δ of an Iridium NEXT tone signal are determined, this tone is processed by the decision module. The decision module is derived through extensive Monte Carlo simulations conducted over various [
SNR,
δ] parameter pairs, with the parameter space defined as:
The
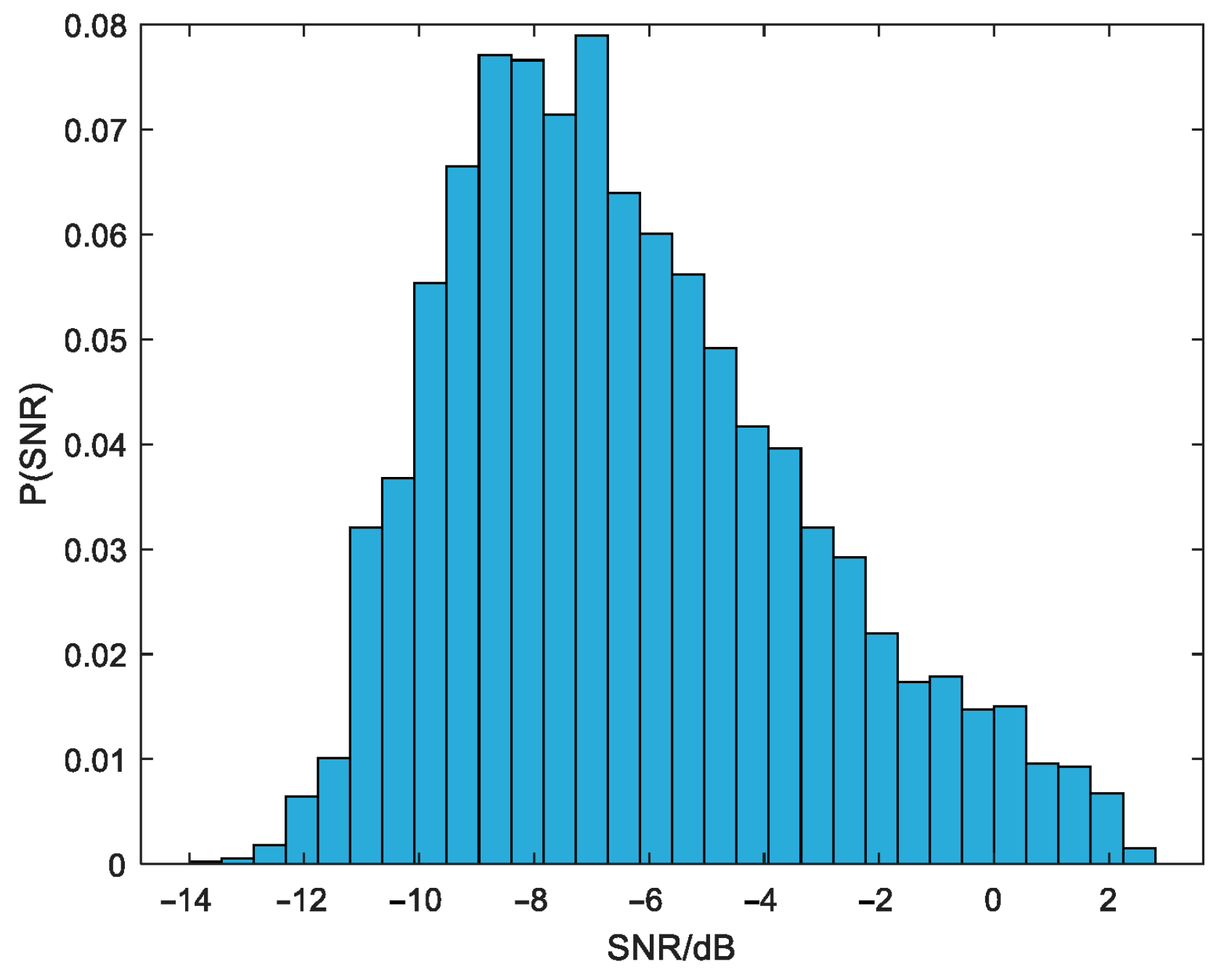
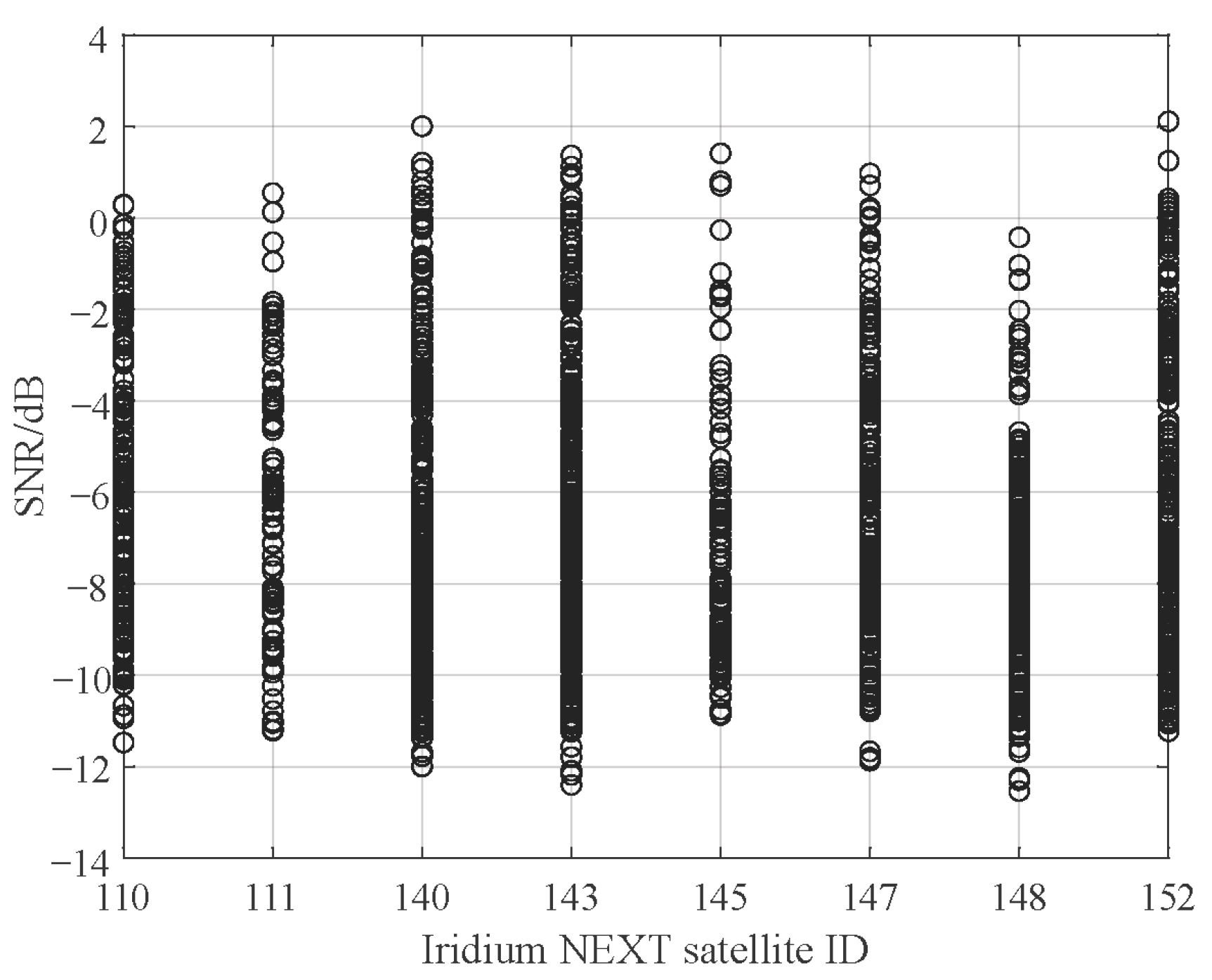
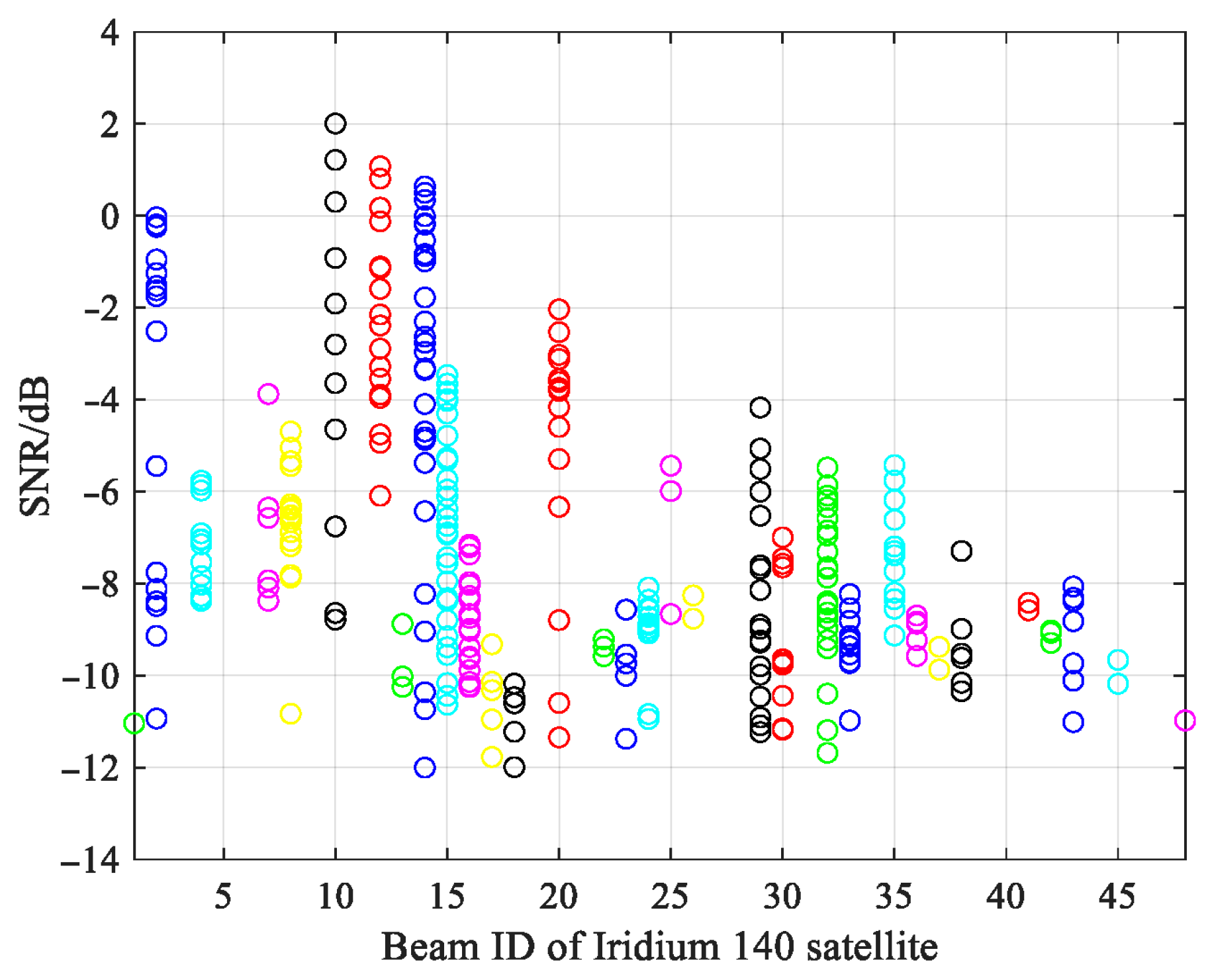
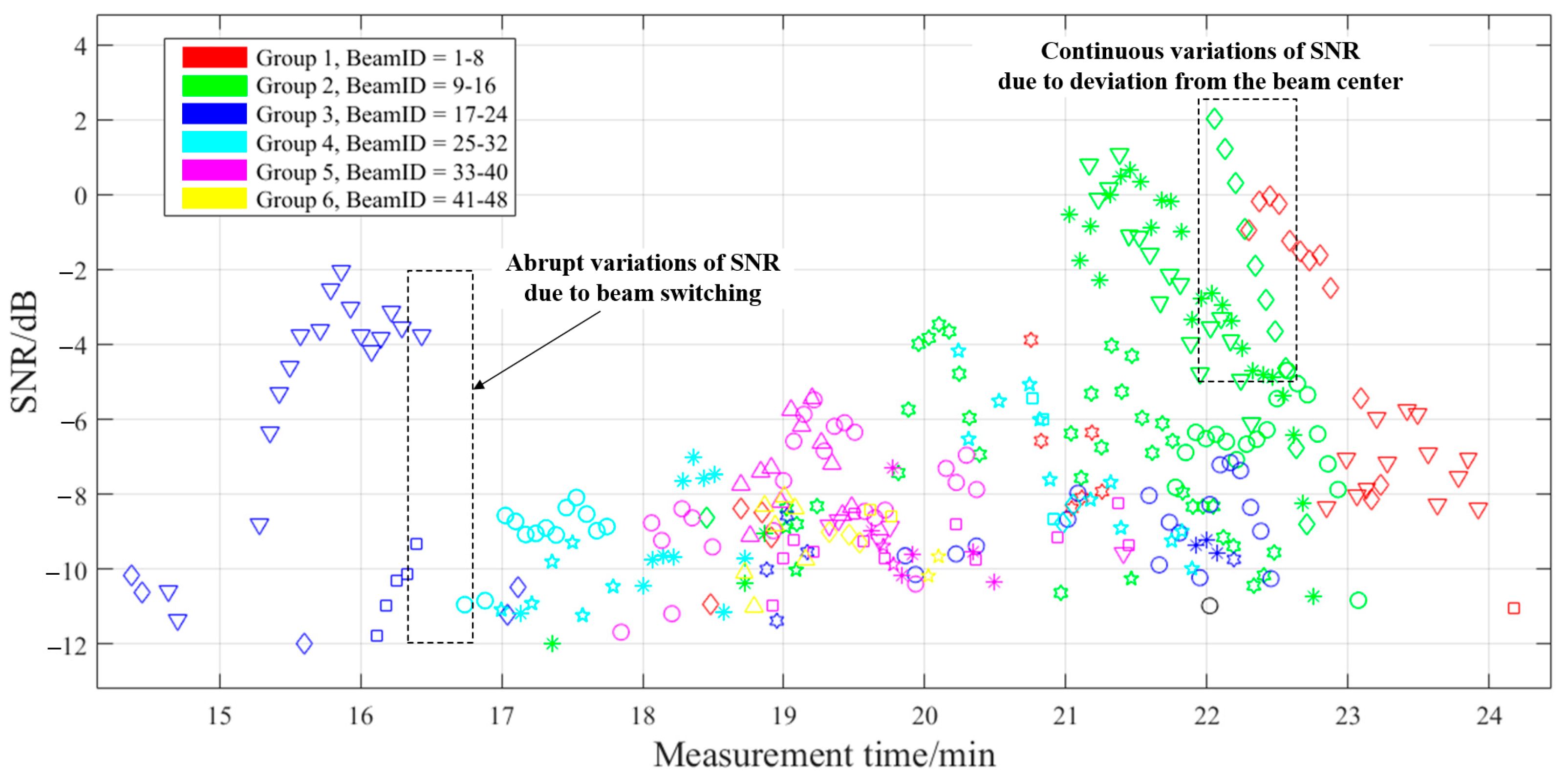
SNR parameter range is determined based on the measured results from
Section 2.3, encompassing the full range of observed SNR values for Iridium signals. The
δ parameter range is defined according to Equation (20). For each parameter pair, Monte Carlo simulations were conducted using both the Rife–Vincent algorithm and MLE, with the RMSE calculated for each method. The algorithm yielding the smaller RMSE was selected as the decision label for that parameter pair, which can be expressed as:
where
denotes the number of Monte Carlo simulations performed for each parameter pair,
and
denote the estimation result obtained using the Rife–Vincent algorithm and MLE, respectively, and
denotes the true frequency. Based on the obtained decision labels for a large number of [SNR,
δ] parameter pairs across the parameter space at fixed step intervals, a K-Nearest Neighbors (KNN) algorithm was employed to decide the
r-th tone’s refined Doppler estimation algorithm. Firstly, compute the Euclidean distance between the point corresponding to the parameters of the
r-th tone on the plane and all points obtained through simulation as follows:
Then, all
are sorted in ascending order to form an ordered distance sequence, from which the top
K points with the smallest distances are selected to constitute the decision set
, which can be expressed as:
Subsequently, the decision weights for the Rife–Vincent algorithm and the MLE can be computed, respectively, as:
where
denotes the tag corresponding to
,
is the indicator function (which equals 1 if the condition is satisfied and 0 otherwise), and
is a small constant introduced to prevent division by zero. Finally, the decision result of the
r-th tone can be derived by comparing the two weight parameters:
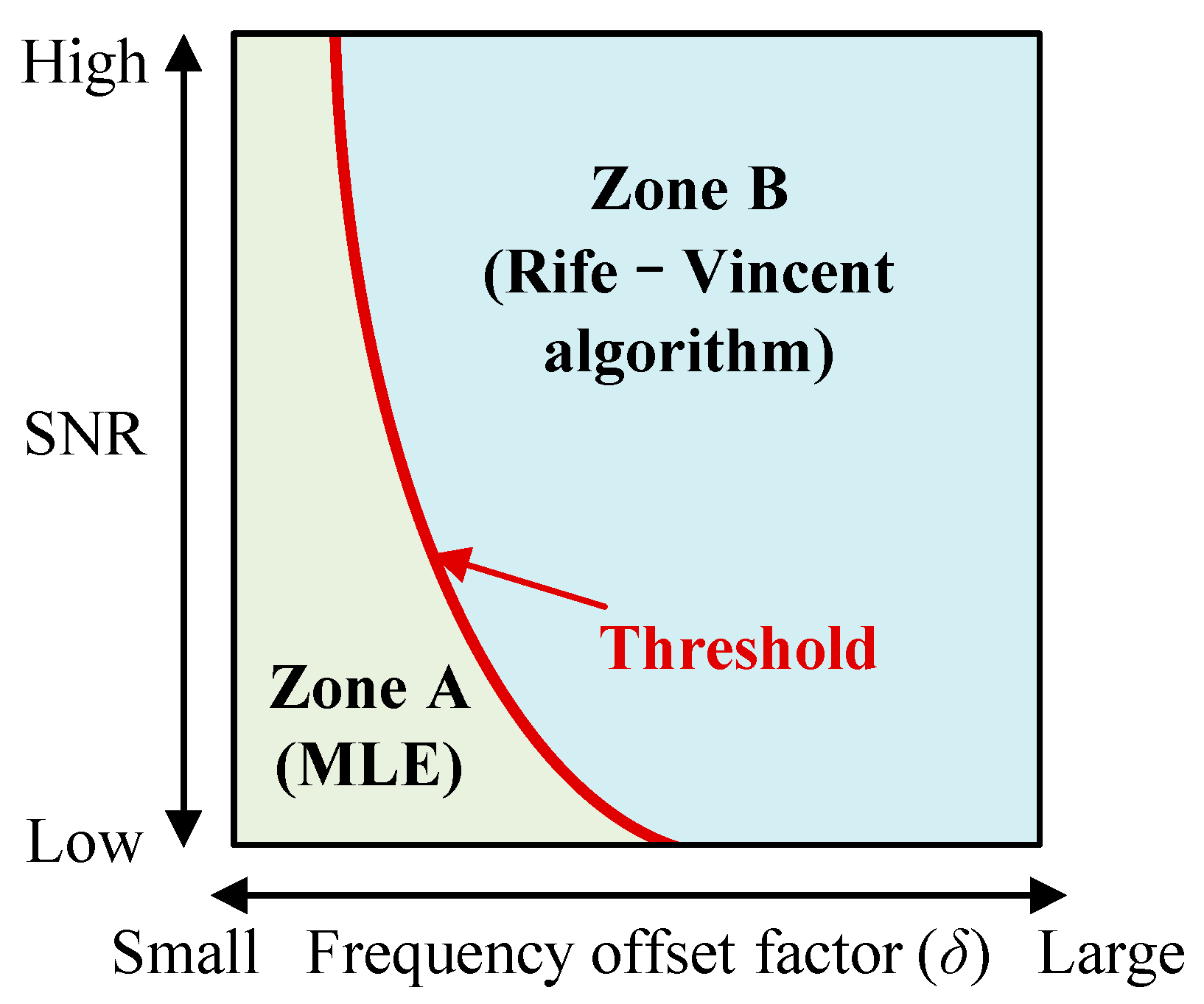
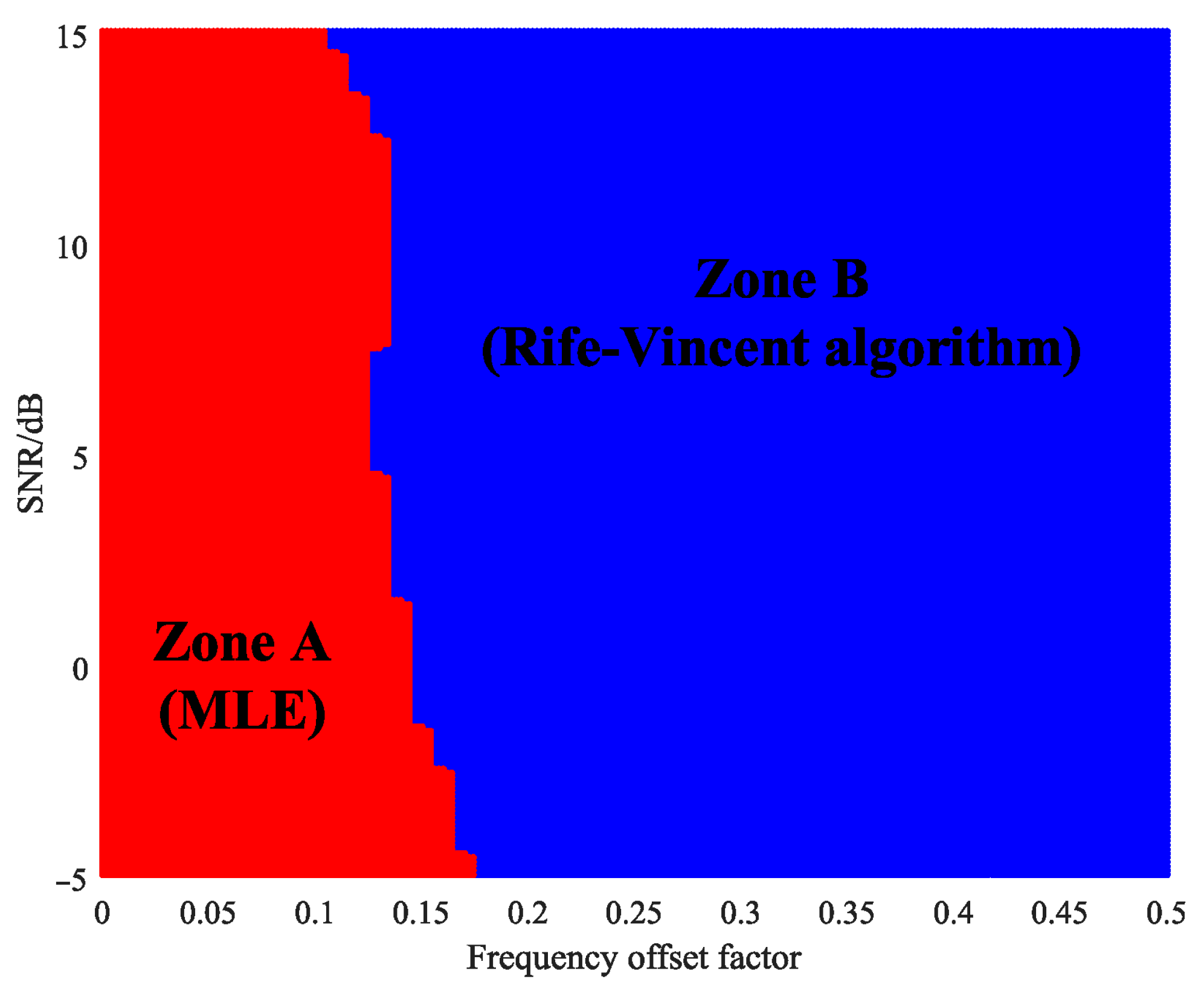
The decision module can be divided into two distinct zones (
Figure 17): Zone A—low
δ values and mainly low SNR—and Zone B—higher
δ values and mainly high SNR. The decision module then classifies each Iridium NEXT tone signal on the basis of its SNR and
δ values: tone signals classified into Zone A are processed with the MLE method, whereas those classified into Zone B are processed with the Rife–Vincent algorithm. By adaptively selecting the most suitable algorithm for each tone signal, the decision module improves the Doppler frequency estimation accuracy relative to existing single-algorithm methods.
In the third step, the preliminary FFT results (
) are compensated by applying the selected processing algorithm to estimate the required Doppler frequency compensation (
). Algorithm selection can strongly influence the operational complexity of the estimation process. If the Rife–Vincent compensation algorithm [
21] is selected, the residual correction estimate
is calculated as:
where
a is the compensation direction defined as in Equation (18),
is the frequency offset factor defined as in Equation (17),
is the sampling frequency, and
is the number of FFT sampling points.
However, if the MLE method is selected instead, the Iridium NEXT tone signal is first down-converted to a low-frequency signal
using the FFT-estimated Doppler frequency
:
The residual correction value is then derived by MLE comparison. The comparison function can be expressed as:
then, the accurate residual correction estimate of the
r-th tone in the block
is the value that minimizes the comparison function, i.e.,
The final, accurate Doppler frequency estimate combines the preliminary FFT estimate (
) with the residual correction (
):










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}