
Obtaining the Highest Quality from a Low-Cost Mobile Scanner: A Comparison of Several Pipelines with a New Scanning Device

 ,
,  , , , and
, , , and
Abstract

1. Introduction
2. Materials and Methods
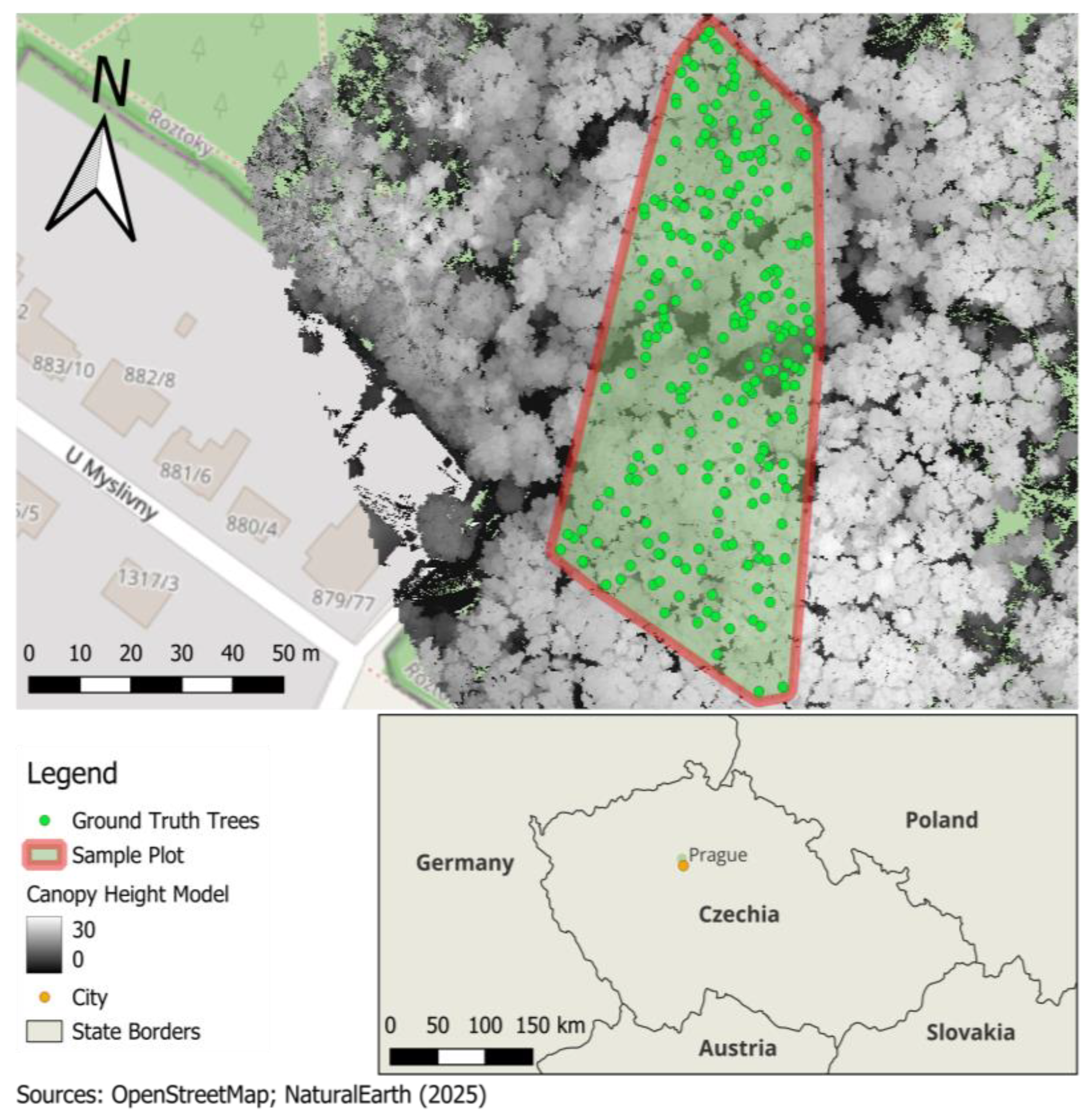
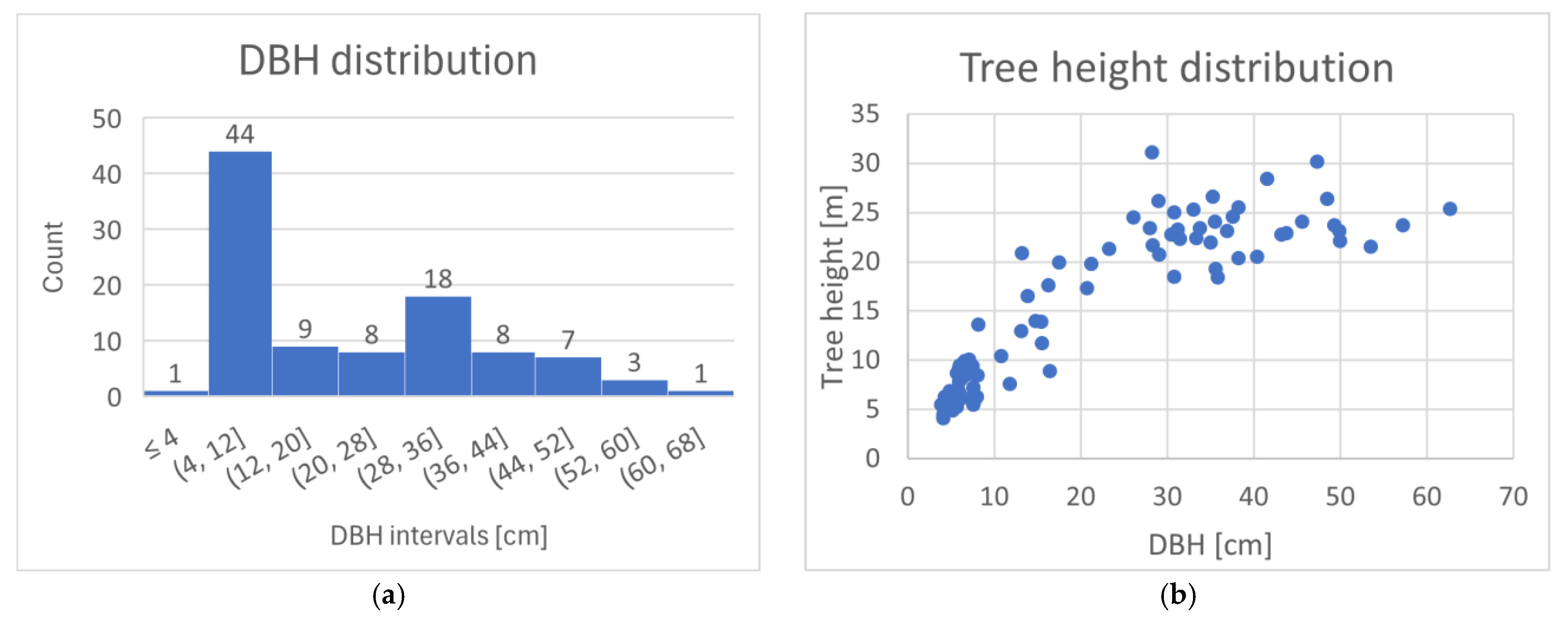
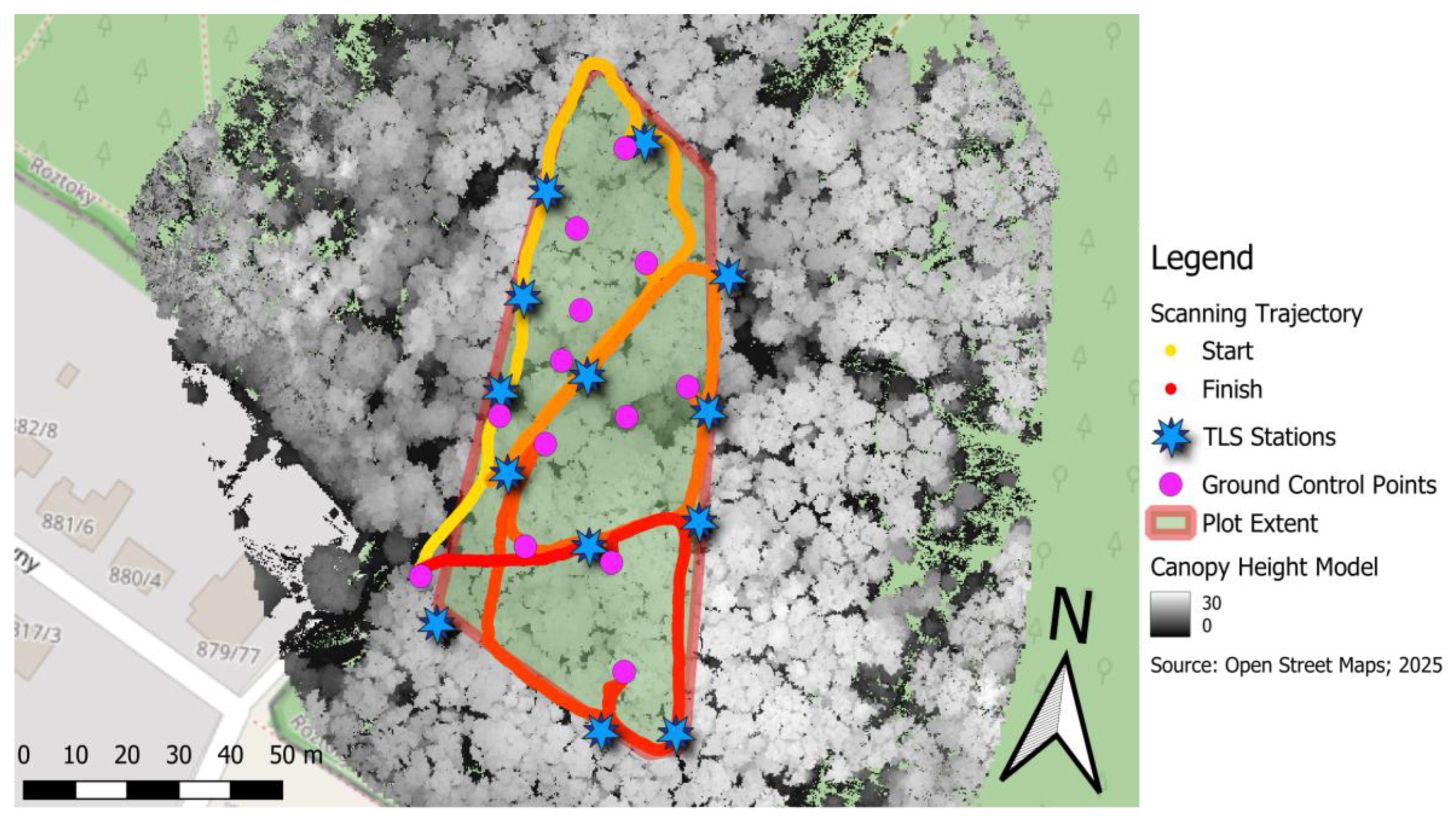
2.1. Study Area
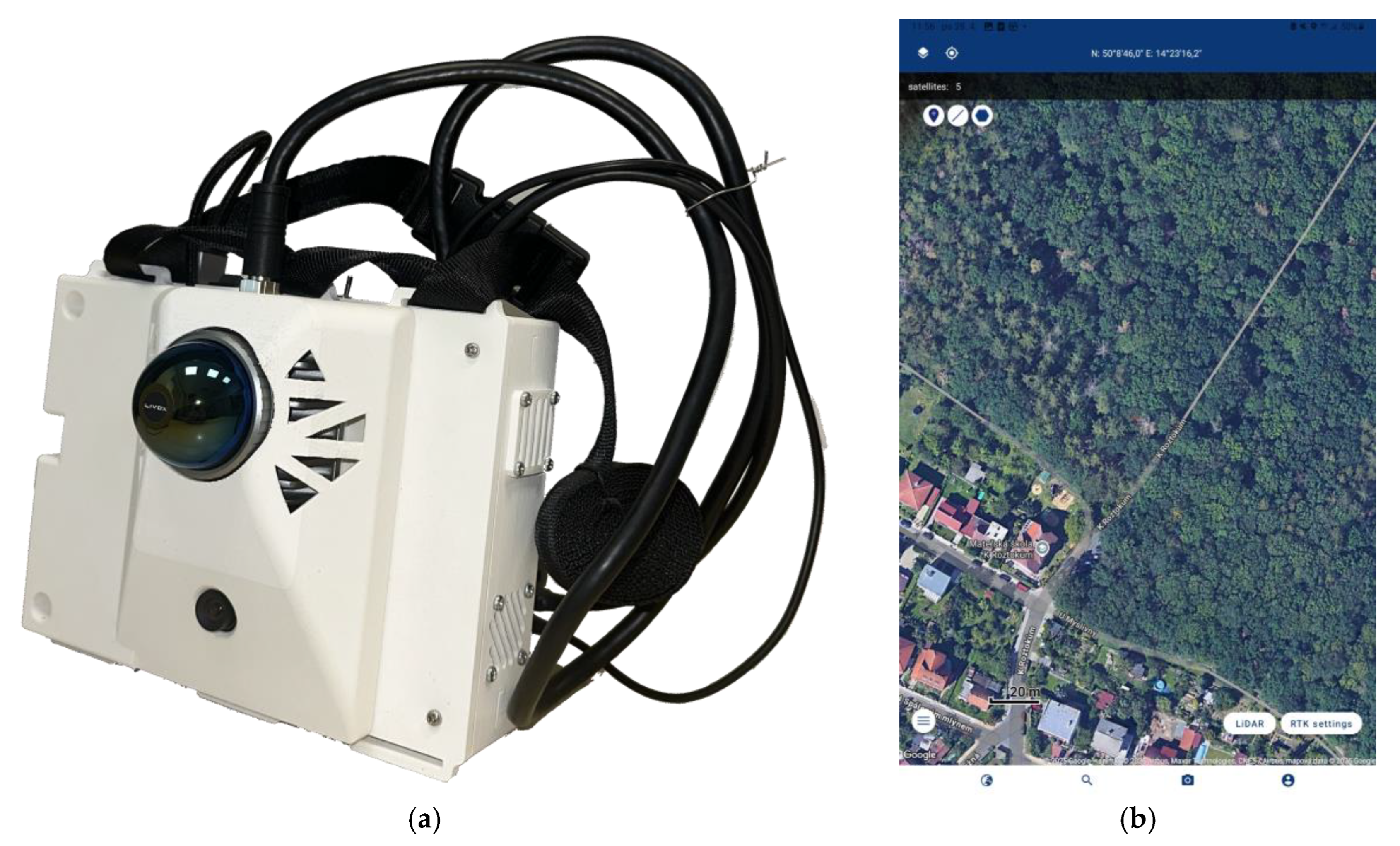
2.2. The LiDAR Scanner Prototype
2.3. Data Collection
- Trimble TX8 (TLS)The Trimble TX8 (Trible Inc., Westminster, CA, USA) is a high-end terrestrial laser scanner that employs a multi-scan acquisition strategy. This approach, widely recognised as the most established and conventional LiDAR scanning method in forestry applications, offers the highest spatial resolution and geometric accuracy. In this study, scanning was performed from 13 individual, georeferenced stations strategically distributed along the predefined trajectory to ensure maximum visibility and coverage. The multi-scan technique mitigates occlusion effects by capturing the forest structure from multiple angles, making it the most precise reference system in the comparison. The raw scan data must be processed using the dedicated software Trimble RealWorks (v11.1), which also provides a registration workflow for the processing and merging of multi-scan missions [35]. In this study, cloud-Based registration was employed.
- GeoSLAM ZEB Horizon (MLS)The GeoSLAM ZEB Horizon (GeoSLAM Ltd., Ruddington, UK) is a handheld mobile laser scanner that collects data through a single-pass scan along the designated trajectory. Scanning began and ended at the same location to form a closed-loop trajectory, which supports improved SLAM (Simultaneous Localisation And Mapping) correction [36]. During scanning, the operator maintained a consistent orientation towards the centre of the plot to ensure optimal coverage of the forest structure. The ZEB Horizon is a commercial-grade mobile laser scanning (MLS) system, recognised for its robustness and reliability in forest environments. Similarly to the Trimble TX8, this device also relies on dedicated commercial software, namely GeoSLAM Hub v6.1.0, for the processing of raw data into point clouds.
- iPhone (MLS)A modern Apple iPhone 14 Pro (Apple Inc., Cupertino, CA, USA), equipped with an integrated LiDAR sensor, was used to perform mobile scanning along the same trajectory. Data collection was carried out using the 3D Scanner App [37], which enables the real-time acquisition and export of point cloud data. The same scanning principles were applied as with the ZEB Horizon and LA03, including consistent device orientation and a closed-loop trajectory, to maintain uniform scanning conditions. However, in the case of this device, suboptimal results can be expected due to the limited 5-metre reach of its LiDAR sensor [38].
- mapry LA03 (MLS)The custom-developed LA03 prototype was evaluated using the same scanning protocol as the ZEB Horizon to ensure comparability. The device was carried along the predefined trajectory, with the operator consistently orienting the sensor towards the plot centre. This ensured consistent scanning geometry and data acquisition conditions, enabling a direct assessment of the prototype’s performance relative to more established devices. The device operates via the dedicated Android application mapry, which provides a user interface for the control of the scanner. The collected data are output directly to a USB drive.
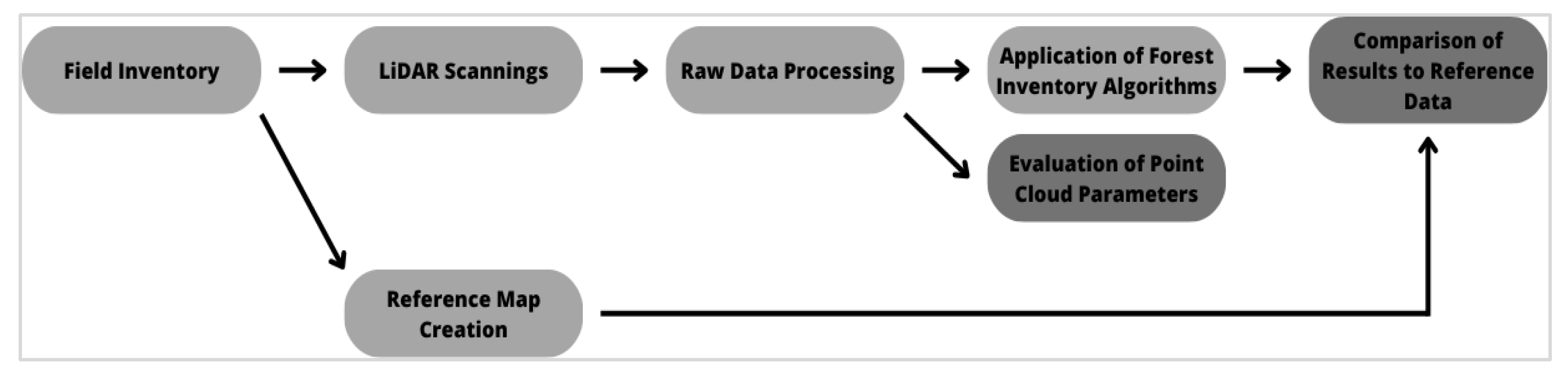
2.4. Data Processing and Evaluation
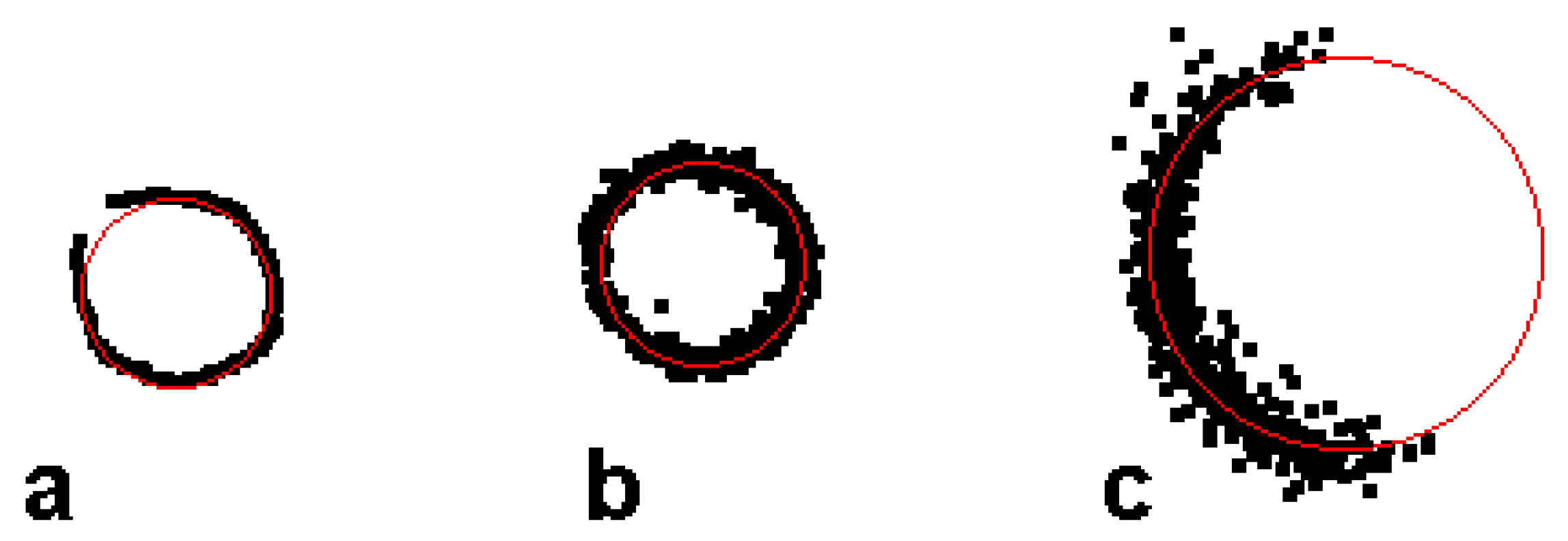
- Manual Approach—This method is designed to provide the most accurate information obtainable from LiDAR scans, relying on the manual identification and extraction of stem cross-sections from the data. In contrast, the other methods—3DFIn, FORTLS, SAMICE, and DendRobot—perform fully automated data processing, as detailed in the following sections. While these automated approaches offer greater efficiency, they may introduce potential errors. Such discrepancies can be assessed by comparing their outputs to those obtained through manual processing, which serves as the benchmark for accuracy.For the purpose of this method, point clouds from all devices were normalised to a digital terrain model (DTM), created through the rasterisation of the point cloud, detecting the lowest points within 1 m grid cells. Afterwards, a 10-cm-thick horizontal slice at 1.3 m above ground level was extracted. Tree-specific segments were then isolated from these slices using the CloudCompare (v2.13.2) software by combining the Label Connected Components tool [39], with ambiguous segments manually excluded, resulting in a total of up to hundreds of usable cross-sections. Due to the computational limitations of the custom RANSAC algorithm used in this method, the number of points in each section was reduced to a maximum of 600 via random subsampling and further optimised by voxelisation with 1 cm steps. This process takes less than one minute per tree and its duration increases approximately linearly with larger DBHs.The RANSAC algorithm in general identifies the most common radius within a dataset by analysing randomly sampled subsets of points. This sampling may be either purely random or exhaustive, testing all possible point combinations. In this study, the latter, known as the brute-force method, was employed. To mitigate its computational demands, the algorithm was optimised for datasets containing fewer than 600 points, thereby avoiding the need for billions of iterations and the substantial storage and processing resources required. For most trees, a sample size of 600 points was found to be sufficient.The algorithm determines the size and position of a circle for each triplet of points, and the most frequently occurring circle is identified as the correct one. Figure 6 illustrates examples of the outputs generated using this approach.
- FORTLS—All aforementioned point cloud data were analysed using the R package FORTLS (v1.2.0) [40]. This package provides an automated workflow for the processing of terrestrial and mobile laser scanning data and is designed to minimise manual intervention while maintaining flexibility through user-defined parameter settings. FORTLS generates key forest inventory outputs, including the diameter at breast height (DBH) and tree spatial location, and is particularly suitable for large-scale or repeatable forest structure assessments.During processing, ground points are classified using the Cloth Simulation Filter, and a digital terrain model is generated by spatial interpolation with a k-nearest neighbour approach using inverse distance weighting at a resolution of 0.2 m. The DTM is then used to normalise the point clouds by adjusting point elevations relative to the ground level.Tree detection in FORTLS is based on the identification of multiple horizontal cross-sections that are vertically aligned and located above the same ground point. This vertical consistency in cross-section positioning is used to infer the presence of a tree stem [41]. The algorithm searches for such cross-sections at various height intervals above ground level, allowing it to capture trees with varying structures and understorey interference.Once a stem is detected, FORTLS employs two distinct methodologies for the estimation of the DBH, both of which are applied to the extracted cross-sections.
- Both approaches produce an estimate of the DBH; however, the algorithm selects the final value based on the variance in the calculated radii. When both methods produce similar results, the RANSAC-based estimate is preferred due to its robustness in fitting circular geometries to natural stem profiles.
- FORTLS thus offers a balanced combination of automation and analytical rigour, making it a valuable tool to assess the utility of point clouds generated by both high-end and low-cost scanning devices. Its implementation within the R environment also facilitates integration with broader data analysis workflows, including statistical modelling and spatial analysis.
- DendRobot—Another pipeline used for mapry-provided point cloud quality estimation was the DendRobot (v0.3) software [42]. This program integrates a suite of established algorithms for point cloud and raster data processing, combining both conventional methods and custom-designed procedures for effective tree detection and measurement. DendRobot incorporates elements commonly used in spatial data analysis, such as geographic information system (GIS) spatial queries, reverse watershed-based tree crown delineation, and the RANSAC circle-fitting algorithm. These are integrated within a cohesive workflow specifically tailored to forest inventory applications.The tree detection procedure within DendRobot follows a distinctive methodology. Initially, the 3D point cloud is projected into 2D space, where a point neighbourhood density analysis is performed. This approach identifies areas of high local point density, which are assumed to correspond to the bases of tree stems. By retaining only these densely populated regions and subsequently reprojecting them into 3D space, the software effectively isolates individual trees. Once tree locations have been identified, the program locates multiple cross-sections along the height of each stem and calculates their diameters, enabling the estimation of key parameters such as the DBH, total tree height, and tree position. The above-terrain height was determined using a 3D mesh DTM, generated through rasterisation and local minima detection within each grid cell.For DBH estimation, DendRobot employs the RANSAC algorithm to fit circles to automatically extracted cross-sections of the tree stems. In this study, the number of RANSAC iterations was fixed at 1000 to ensure robust fitting, and the thickness of the DBH sampling disc was set at 7 cm. This parameter choice was based on findings from previous research, which demonstrated that a disc thickness of 7 cm yields optimal accuracy in DBH estimation [43]. The DendRobot software supports automated processing while allowing users to define input parameters if desired.
- 3DFIn (Cloud Compare Plugin)—This pipeline comes as a plugin for the CloudCompare (v2.13.2) [39] software, making it widely accessible to researchers, practitioners, and forest managers, with minimal barriers to entry. The availability of this tool within a well-established platform significantly enhances its usability and potential for integration into existing workflows.The pipeline’s tree detection algorithm operates on a normalised point cloud, where normalisation is performed using a digital terrain model (DTM) generated by the Cloth Simulation Filter. From this normalised cloud, the algorithm extracts a horizontal “slice” of a predefined thickness, typically intersecting the lower portion of the forest stand, where tree stems are more distinct and less affected by canopy occlusion. Within this extracted section, the algorithm applies a geometric feature descriptor known as “Verticality” [44], which quantifies the alignment of points with respect to the vertical axis. This feature is used to differentiate tree stems—typically exhibiting strong verticality—from other structures such as branches, undergrowth, and noise, which tend to have more irregular or non-vertical geometries. Once high-verticality regions are identified, they are treated as initial seed points for further stem detection. The algorithm then expands from these seed locations using a spatial clustering approach to identify and segment complete individual tree stems. Each detected stem is assigned a unique label, allowing for further morphological analysis at the tree level.To quantify stem dimensions, the pipeline performs cross-sectional diameter measurements at regular vertical intervals along the length of each identified stem. At each interval, a RANSAC-based circle-fitting algorithm is applied to estimate the local diameter. This procedure yields detailed information about stem tapering, in addition to key metrics such as the diameter at breast height (DBH), total tree height, and tree position [45].
- SAMICE—The workflow referred to as Search And Measure In Complex Environments (SAMICE) was developed as a fully automated pipeline for the segmentation and measurement of trees within structurally complex forest environments, such as those found in selection forests and close-to-nature silvicultural systems. It is specifically designed to handle noisy point clouds generated by SLAM-based mobile laser scanning (MLS) devices.The SAMICE(v0.1) workflow employs a multi-layered approach, analysing vertical projections of seven horizontal slices extracted from the normalised point cloud, covering a height range between 0.8 and 1.8 m above the detected ground level. Ground elevation is estimated by computing the first percentile of Z-values within 0.2 m grid cells. The resulting raster is then smoothed using a local quantile filter to reduce the influence of noise and outliers. Height anomalies are removed based on their statistical deviation from the median of elevation differences between the raw and smoothed surfaces. Any missing ground values are interpolated using a nearest neighbour approach. A local slope correction is subsequently applied to mitigate systematic underestimation of the ground elevation. The final digital terrain model (DTM) is used to normalise the original point cloud by subtracting the ground elevation from each Z-value.Each extracted slice is then processed using the mean shift clustering algorithm [46], followed by a RANSAC-based circle-fitting procedure. To improve the robustness of the fitting, additional filtering conditions are applied, including thresholds for the circle radius, completeness, the ratio of inliers to total points, and the homogeneity of the point distribution along the stem perimeter. Candidate trees are identified and their DBH is estimated based on a consensus of radius and centre position values derived across the set of horizontal slices.For further details of the workflow design and parameterisation, please refer to the work by Kuželka et al. [46].
2.5. Statistical Metrics
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Torresan, C.; Benito Garzón, M.; O’Grady, M.; Robson, T.M.; Picchi, G.; Panzacchi, P.; Tomelleri, E.; Smith, M.; Marshall, J.; Wingate, L.; et al. A New Generation of Sensors and Monitoring Tools to Support Climate-Smart Forestry Practices. Can. J. For. Res. 2021, 51, 1751–1765. [Google Scholar] [CrossRef]
- Surovỳ, P.; Kuželka, K. Acquisition of Forest Attributes for Decision Support at the Forest Enterprise Level Using Remote-Sensing Techniques-a Review. Forests 2019, 10, 273. [Google Scholar] [CrossRef]
- Temperli, C.; Santopuoli, G.; Bottero, A.; Barbeito, I.; Alberdi, I.; Condés, S.; Gschwantner, T.; Bosela, M.; Neroj, B.; Fischer, C.; et al. National Forest Inventory Data to Evaluate Climate-Smart Forestry. In Climate-Smart Forestry in Mountain Regions; Springer: Berlin/Heidelberg, Germany, 2022; pp. 107–139. [Google Scholar]
- Alberdi, I.; Cañellas, I.; Vallejo Bombín, R. The Spanish National Forest Inventory: History, Development, Challenges and Perspectives. Pesqui. Florest. Bras. 2017, 37, 361. [Google Scholar] [CrossRef]
- Avitabile, V.; Camia, A. An Assessment of Forest Biomass Maps in Europe Using Harmonized National Statistics and Inventory Plots. Ecol. Manag. 2018, 409, 489–498. [Google Scholar] [CrossRef] [PubMed]
- Čerňava, J.; Mokroš, M.; Tuček, J.; Antal, M.; Slatkovská, Z. Processing Chain for Estimation of Tree Diameter from GNSS-IMU-Based Mobile Laser Scanning Data. Remote Sens. 2019, 11, 615. [Google Scholar] [CrossRef]
- Cabo, C.; Del Pozo, S.; Rodríguez-Gonzálvez, P.; Ordóñez, C.; González-Aguilera, D. Comparing Terrestrial Laser Scanning (TLS) and Wearable Laser Scanning (WLS) for Individual Tree Modeling at Plot Level. Remote Sens. 2018, 10, 540. [Google Scholar] [CrossRef]
- Xie, Y.; Yang, T.; Wang, X.; Chen, X.; Pang, S.; Hu, J.; Wang, A.; Chen, L.; Shen, Z. Applying a Portable Backpack Lidar to Measure and Locate Trees in a Nature Forest Plot: Accuracy and Error Analyses. Remote Sens. 2022, 14, 1806. [Google Scholar] [CrossRef]
- Muukkonen, P. Generalized Allometric Volume and Biomass Equations for Some Tree Species in Europe. Eur. J. Res. 2007, 126, 157–166. [Google Scholar] [CrossRef]
- Luoma, V.; Saarinen, N.; Wulder, M.A.; White, J.C.; Vastaranta, M.; Holopainen, M.; Hyyppä, J. Assessing Precision in Conventional Field Measurements of Individual Tree Attributes. Forests 2017, 8, 38. [Google Scholar] [CrossRef]
- Li, S.; Fang, L.; Sun, Y.; Xia, L.; Lou, X. Development of Measuring Device for Diameter at Breast Height of Trees. Forests 2023, 14, 192. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is Field-Measured Tree Height as Reliable as Believed–A Comparison Study of Tree Height Estimates from Field Measurement, Airborne Laser Scanning and Terrestrial Laser Scanning in a Boreal Forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Barbosa, R.I.; Ramírez-Narváez, P.N.; Fearnside, P.M.; Villacorta, C.D.A.; Carvalho, L.C.d.S. Allometric Models to Estimate Tree Height in Northern Amazonian Ecotone Forests. Acta Amaz. 2019, 49, 81–90. [Google Scholar] [CrossRef]
- Blanchard, E.; Birnbaum, P.; Ibanez, T.; Boutreux, T.; Antin, C.; Ploton, P.; Vincent, G.; Pouteau, R.; Vandrot, H.; Hequet, V.; et al. Contrasted Allometries between Stem Diameter, Crown Area, and Tree Height in Five Tropical Biogeographic Areas. Trees 2016, 30, 1953–1968. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International Benchmarking of Terrestrial Laser Scanning Approaches for Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial Laser Scanning in Forest Ecology: Expanding the Horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Wassermann, C.; Nothdurft, A. Influence of Scanner Position and Plot Size on the Accuracy of Tree Detection and Diameter Estimation Using Terrestrial Laser Scanning on Forest Inventory Plots. Remote Sens. 2019, 11, 1602. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The Use of Terrestrial LiDAR Technology in Forest Science: Application Fields, Benefits and Challenges. Ann. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Bienert, A.; Georgi, L.; Kunz, M.; Maas, H.G.; von Oheimb, G. Comparison and Combination of Mobile and Terrestrial Laser Scanning for Natural Forest Inventories. Forests 2018, 9, 395. [Google Scholar] [CrossRef]
- Čerňava, J.; Chudý, F.; Tunák, D.; Saloň, Š.; Vyhnáliková, Z. The Vertical Accuracy of Digital Terrain Models Derived from the Close-Range Photogrammetry Point Cloud Using Different Methods of Interpolation and Resolutions. Cent. Eur. For. J. 2019, 66, 198–205. [Google Scholar] [CrossRef]
- Çakir, G.Y.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A. 3D LiDAR Scanning of Urban Forest Structure Using a Consumer Tablet. Urban Sci. 2021, 5, 88. [Google Scholar] [CrossRef]
- Ning, X.; Ma, Y.; Hou, Y.; Lv, Z.; Jin, H.; Wang, Z.; Wang, Y. Trunk-Constrained and Tree Structure Analysis Method for Individual Tree Extraction from Scanned Outdoor Scenes. Remote Sens. 2023, 15, 1567. [Google Scholar] [CrossRef]
- Tatsumi, S.; Yamaguchi, K.; Furuya, N. ForestScanner: A Mobile Application for Measuring and Mapping Trees with LiDAR-equipped IPhone and IPad. Methods Ecol. Evol. 2023, 14, 1603–1609. [Google Scholar] [CrossRef]
- Hrdina, M.; Surový, P. Internal Tree Trunk Decay Detection Using Close Range Remote Sensing Data and the PointNet Deep Learning Method. Remote Sens. 2023, 15, 5712. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple Ipad pro and Integrated Lidar Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel Low-Cost Mobile Mapping Systems for Forest Inventories as Terrestrial Laser Scanning Alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Wu, F.; Wu, B.; Zhao, D. Real-Time Measurement of Individual Tree Structure Parameters Based on Augmented Reality in an Urban Environment. Ecol. Inf. 2023, 77, 102207. [Google Scholar] [CrossRef]
- Hyyppä, J.; Virtanen, J.-P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for Crowdsourcing Forestry Information. Forests 2017, 9, 6. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in Forests–An Initial Experience of the Use of the New Google Technology in Connection with Forest Inventory Tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial Laser Scanning in Forest Inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Livox. Livox MID-360 Specs; Livox: Shenzhen, China, 2023. [Google Scholar]
- TDK ICM-40609-D Data Sheet. Available online: http://upload.cdn.oneyac.com/upload/document/1594170998146_7512.pdf (accessed on 21 July 2025).
- Trimble. Trimble RealWorks User Guide, 1st ed.; Trimble Inc.: Sunnyvale, VA, USA, 2021. [Google Scholar]
- GeoSLAM. ZEB Family Brochure; GeoSLAM: Ruddington, UK, 2019. [Google Scholar]
- Laan Labs. 3d Scanner App; Laan Labs: New York, NY, USA, 2023. [Google Scholar]
- Apple Inc. IPhone 14 Pro-Technical Specifications; Apple Inc.: Cupertino, CA, USA, 2022. [Google Scholar]
- CloudCompare (Version 2.13.2) [GPL Software]. 2025. Available online: http://www.cloudcompare.org/ (accessed on 21 July 2025).
- Molina-Valero, J.A.; Villamayor, M.J.G.; Pérez, M.A.N.; Álvarez-González, J.G.; Montes, F.; Martínez-Calvo, A.; Pérez-Cruzado, C. FORTLS: An R Package for Processing TLS Data and Estimating Stand Variables in Forest Inventories. Environ. Sci. Proc. 2021, 3, 38. [Google Scholar]
- Molina-Valero, J.A.; Martínez-Calvo, A.; Ginzo Villamayor, M.J.; Novo Pérez, M.A.; Álvarez-González, J.G.; Montes, F.; Pérez-Cruzado, C. Operationalizing the Use of TLS in Forest Inventories: The R Package FORTLS. Environ. Model. Softw. 2022, 150, 105337. [Google Scholar] [CrossRef]
- Hrdina, M. DendRobot v0.3. Available online: www.dendrobot.czu.cz (accessed on 28 April 2025).
- Akpo, H.A.; Atindogbé, G.; Obiakara, M.C.; Gbedolo, M.A.; Laly, F.G.; Lejeune, P.; Fonton, N.H. Accuracy of Tree Stem Circumference Estimation Using Close Range Photogrammetry: Does Point-Based Stem Disk Thickness Matter? Trees For. People 2020, 2, 100019. [Google Scholar] [CrossRef]
- Hackel, T.; Wegner, J.D.; Schindler, K. Contour Detection in Unstructured 3D Point Clouds. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 23–27 June 2016; IEEE: Piscataway, NJ, USA; pp. 1610–1618. [Google Scholar]
- Laino, D.; Cabo, C.; Prendes, C.; Janvier, R.; Ordonez, C.; Nikonovas, T.; Doerr, S.; Santin, C. 3DFin: A Software for Automated 3D Forest Inventories from Terrestrial Point Clouds. For. Int. J. For. Res. 2024, 97, 479–496. [Google Scholar] [CrossRef]
- Kuželka, K.; Marušák, R.; Surový, P. Inventory of Close-to-Nature Forest Stands Using Terrestrial Mobile Laser Scanning. Int. J. Appl. Earth Obs. Geoinf. 2022, 115, 103104. [Google Scholar] [CrossRef]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef]
- Rybansky, M. Determination of Forest Structure from Remote Sensing Data for Modeling the Navigation of Rescue Vehicles. Appl. Sci. 2022, 12, 3939. [Google Scholar] [CrossRef]
- Surový, P.; Kuželka, K. Application of Remote Sensing in Forestry; Czech University of Life Sciences: Prague, Czech Republic, 2019; ISBN 978-80-213-3008-5. [Google Scholar]
- Eliopoulos, N.J.; Shen, Y.; Nguyen, M.L.; Arora, V.; Zhang, Y.; Shao, G.; Woeste, K.; Lu, Y.H. Rapid Tree Diameter Computation with Terrestrial Stereoscopic Photogrammetry. J. For. 2020, 118, 355–361. [Google Scholar] [CrossRef]
- Mokro, M.; Liang, X.; Surový, P.; Valent, P.; Čerňava, J.; Chudý, F.; Tunák, D.; Saloň, I.; Merganič, J. Evaluation of Close-Range Photogrammetry Image Collection Methods for Estimating Tree Diameters. ISPRS Int. J. Geoinf. 2018, 7, 93. [Google Scholar] [CrossRef]
- Miller, J.; Morgenroth, J.; Gomez, C. 3D Modelling of Individual Trees Using a Handheld Camera: Accuracy of Height, Diameter and Volume Estimates. Urban For. Urban Green. 2015, 14, 932–940. [Google Scholar] [CrossRef]
- Solares-Canal, A.; Alonso, L.; Picos, J.; Armesto, J. Automatic Tree Detection and Attribute Characterization Using Portable Terrestrial Lidar. Trees-Struct. Funct. 2023, 37, 963–979. [Google Scholar] [CrossRef]
- Stal, C.; Verbeurgt, J.; De Sloover, L.; De Wulf, A. Assessment of Handheld Mobile Terrestrial Laser Scanning for Estimating Tree Parameters. J. Res. 2021, 32, 1503–1513. [Google Scholar] [CrossRef]
- Luoma, V.; Saarinen, N.; Kankare, V.; Tanhuanpää, T.; Kaartinen, H.; Kukko, A.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Examining Changes in Stem Taper and Volume Growth with Two-Date 3D Point Clouds. Forests 2019, 10, 382. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Total Data Extent [m2] | Points Within Plot | Points/m2 (Height > 0.2 m) | Points/m2 (Height < 0.2 m) |
|---|---|---|---|---|
| TLS | 30,158.3 | 176,492,535 | 33,122.2 | 11,546.5 |
| ZEB | 14,027.6 | 116,743,698 | 19,487.7 | 10,059.1 |
| iPhone | 1101.3 | 1,744,170 | 53.6 | 387.9 |
| LA03 | 7601.9 | 24,644,001 | 4026.0 | 2211.2 |
| Plot | 3951.1 | N/A | N/A | N/A |
| Scanner | TLS | ZEB | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Algorithm | Manual | 3DFIn | FORTLS | DendRobot | SAMICE | Manual | 3DFIn | FORTLS | DendRobot | SAMICE |
| MAE [cm] | 0.8 | 1.4 | 4.7 | 2.7 | 0.8 | 0.9 | 1.6 | 4.2 | 1.8 | 1.3 |
| RMSE [cm] | 1.0 | 2.2 | 7.9 | 4.8 | 1.0 | 1.2 | 2.4 | 7.4 | 2.5 | 1.6 |
| rRMSE [%] | 4.7 | 8.4 | 24.9 | 18.8 | 4.6 | 5.4 | 9.4 | 22.1 | 10.8 | 7.3 |
| Detection Rate [%] | 99.6 | 72.0 | 53.4 | 71.2 | 98.7 | 99.2 | 77.1 | 44.5 | 86.0 | 97.0 |
| Scanner | iPhone | LA03 | ||||||||
| Algorithm | Manual | 3DFIn | FORTLS | DendRobot | SAMICE | Manual | 3DFIn | FORTLS | DendRobot | SAMICE |
| MAE [cm] | 10.0 | 15.1 | 11.7 | 13.1 | 9.5 | 3.7 | 13.6 | 5.8 | 6.7 | 3.6 |
| RMSE [cm] | 13.6 | 23.0 | 18.3 | 22.2 | 13.0 | 6.0 | 20.3 | 8.2 | 10.5 | 4.4 |
| rRMSE [%] | 44.3 | 55.0 | 44.5 | 57.5 | 43.8 | 24.8 | 66.5 | 22.3 | 37.1 | 19.7 |
| Detection Rate [%] | 22.5 | 8.1 | 7.2 | 14.0 | 21.6 | 78.0 | 30.5 | 16.5 | 47.0 | 76.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrdina, M.; Molina-Valero, J.A.; Kuželka, K.; Tatsumi, S.; Yamaguchi, K.; Melichová, Z.; Mokroš, M.; Surový, P. Obtaining the Highest Quality from a Low-Cost Mobile Scanner: A Comparison of Several Pipelines with a New Scanning Device. Remote Sens. 2025, 17, 2564. https://doi.org/10.3390/rs17152564
Hrdina M, Molina-Valero JA, Kuželka K, Tatsumi S, Yamaguchi K, Melichová Z, Mokroš M, Surový P. Obtaining the Highest Quality from a Low-Cost Mobile Scanner: A Comparison of Several Pipelines with a New Scanning Device. Remote Sensing. 2025; 17(15):2564. https://doi.org/10.3390/rs17152564
Chicago/Turabian StyleHrdina, Marek, Juan Alberto Molina-Valero, Karel Kuželka, Shinichi Tatsumi, Keiji Yamaguchi, Zlatica Melichová, Martin Mokroš, and Peter Surový. 2025. "Obtaining the Highest Quality from a Low-Cost Mobile Scanner: A Comparison of Several Pipelines with a New Scanning Device" Remote Sensing 17, no. 15: 2564. https://doi.org/10.3390/rs17152564
APA StyleHrdina, M., Molina-Valero, J. A., Kuželka, K., Tatsumi, S., Yamaguchi, K., Melichová, Z., Mokroš, M., & Surový, P. (2025). Obtaining the Highest Quality from a Low-Cost Mobile Scanner: A Comparison of Several Pipelines with a New Scanning Device. Remote Sensing, 17(15), 2564. https://doi.org/10.3390/rs17152564