
Biomass Estimation of Apple and Citrus Trees Using Terrestrial Laser Scanning and Drone-Mounted RGB Sensor


Abstract

1. Introduction
2. Materials and Methods
2.1. Site Selection and Sampling of Individual Trees of Apple and Citrus
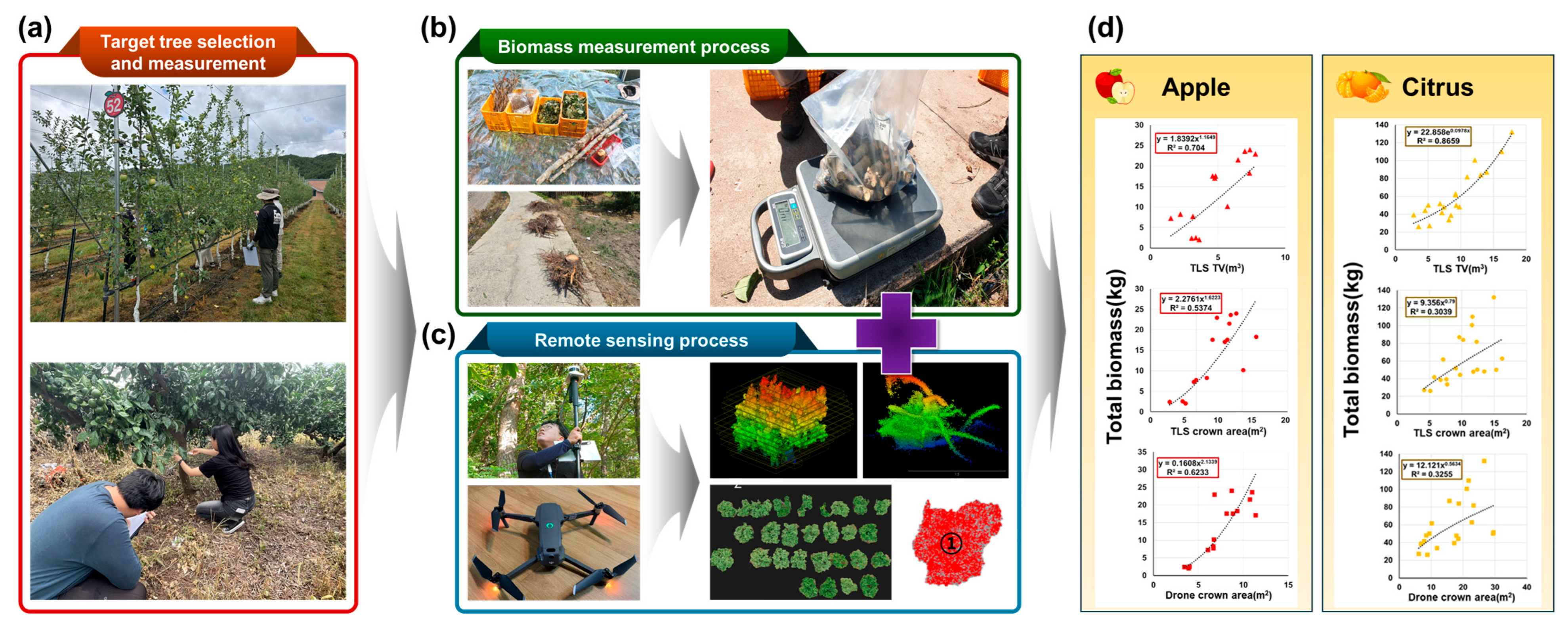
2.2. Sampling and Biomass Measurement
2.3. TLS and Drone_RGB Scanning and Data Preprocessing
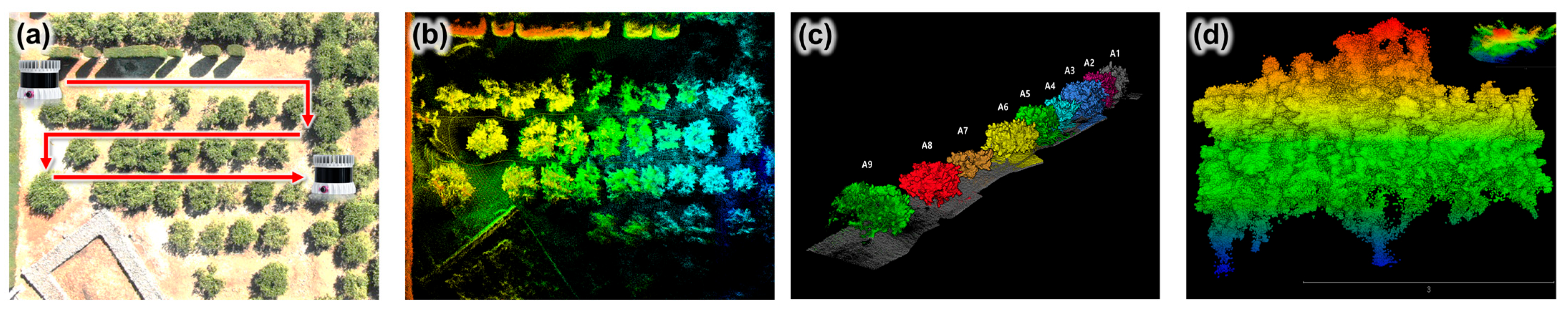
2.3.1. TLS Data Acquisition and Preprocessing
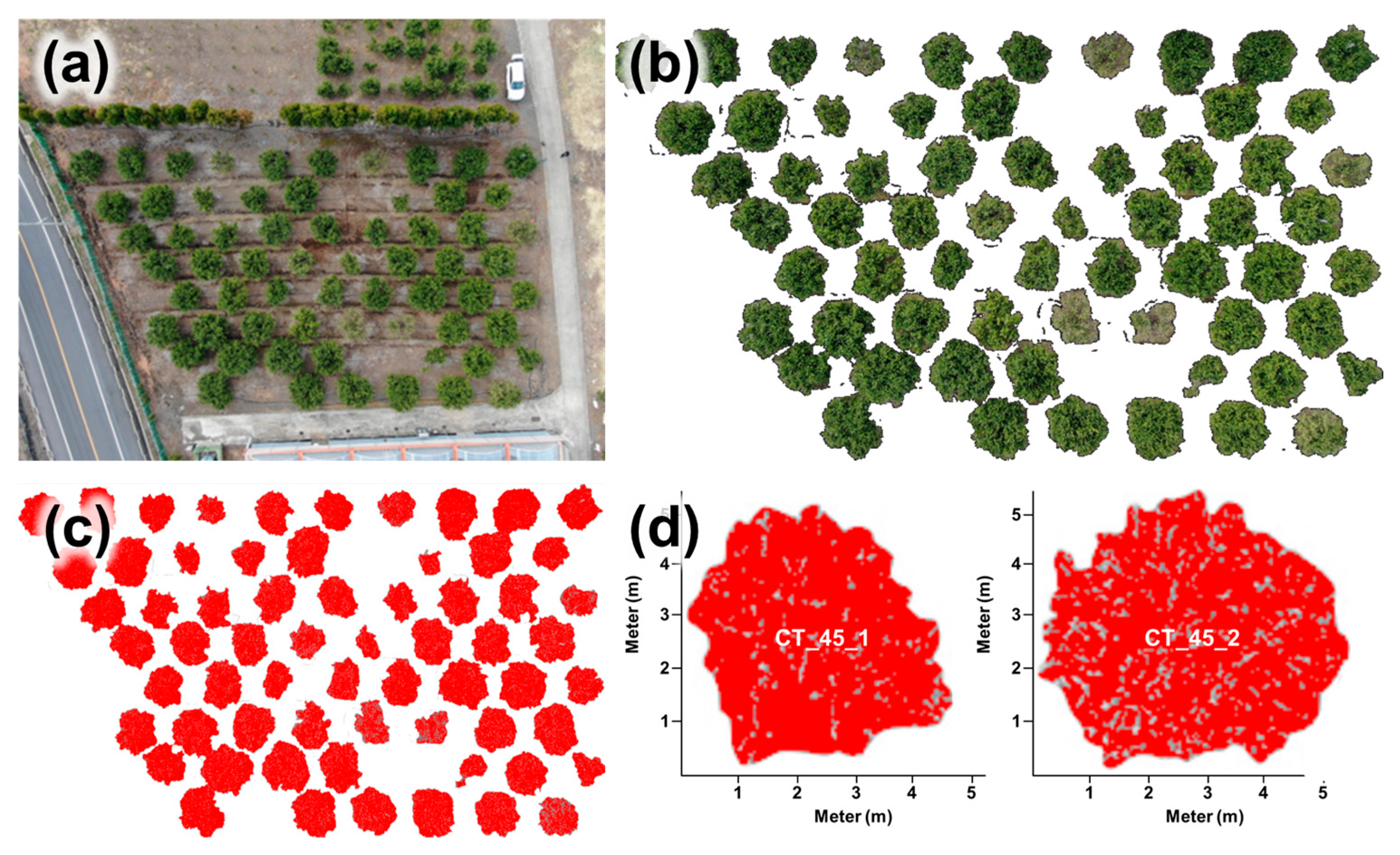
2.3.2. Drone_RGB Data Acquisition and Processing
2.4. Model Development and Model Validation
3. Results
3.1. Data Collection Results by Tree Age
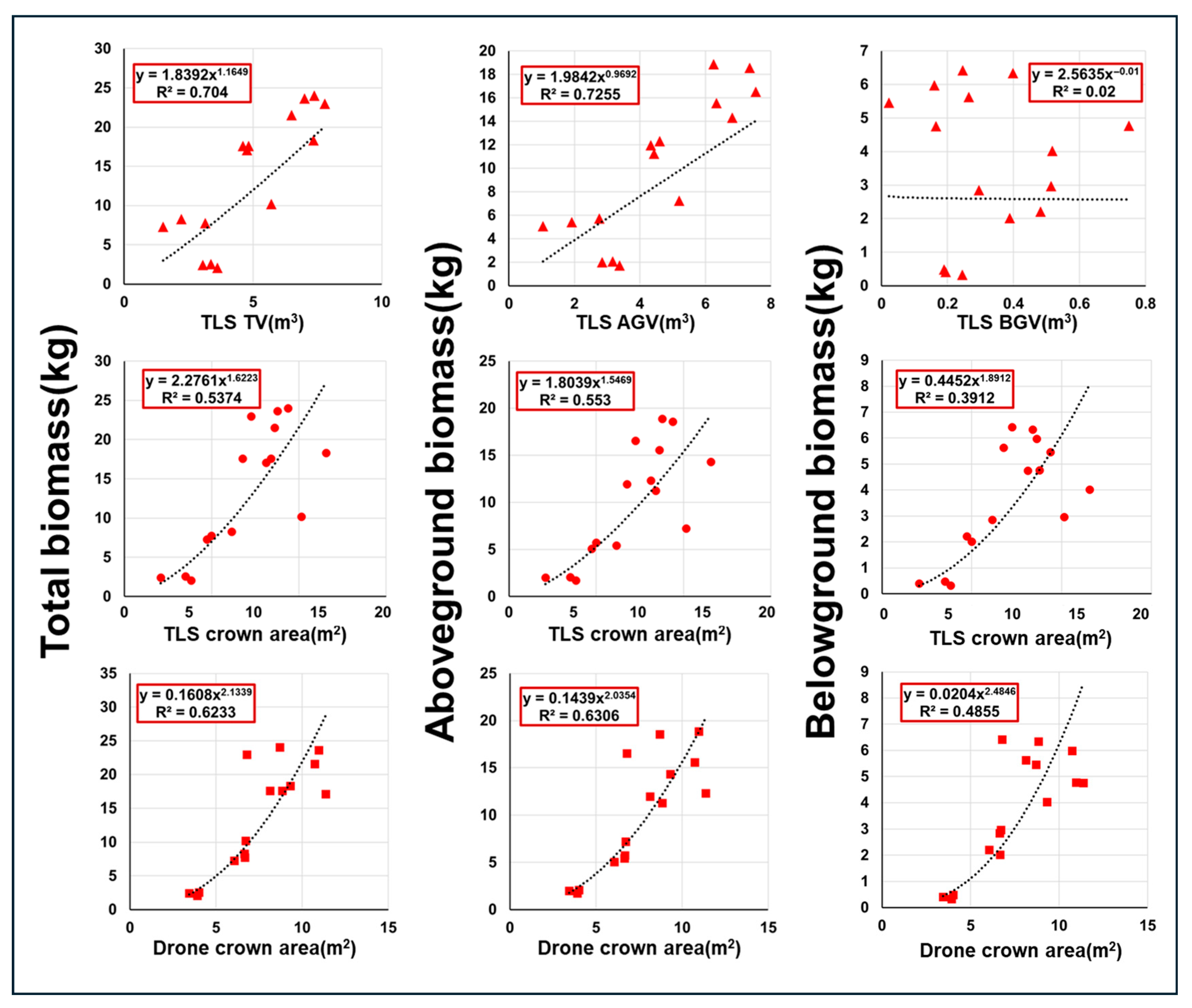
3.2. Evaluation of Fruit Tree Biomass Using TLS and Drone_RGB Data
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Masson-Delmotte, V.; Zhai, P.; Pörtner, H.O.; Roberts, D.; Skea, J.; Shukla, P.R.; Waterfield, T. Global warming of 1.5 C. IPCC Spec. Rep. Impacts Glob. Warm. 2019, 1, 93–174. [Google Scholar]
- Mbow, H.O.P.; Reisinger, A.; Canadell, J.; O’Brien, P. Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems (SR2); IPCC: Ginevra, Switzerland, 2017; p. 650. [Google Scholar]
- Jung, J.A.; Cho, Y.; Lee, S.; Lee, M.J. Actions to expand the use of geospatial data and satellite imagery for improved estimation of carbon sinks in the LULUCF Sector. Korean J. Remote Sens. 2024, 40, 203–217. [Google Scholar]
- Johnson, J.M.F.; Franzluebbers, A.J.; Weyers, S.L.; Reicosky, D.C. Agricultural opportunities to mitigate greenhouse gas emissions. Environ. Pollut. 2007, 150, 107–124. [Google Scholar] [CrossRef] [PubMed]
- Houghton, R.A.; House, J.I.; Pongratz, J.; Van Der Werf, G.R.; Defries, R.S.; Hansen, M.C.; Ramankutty, N. Carbon emissions from land use and land-cover change. Biogeosciences 2012, 9, 5125–5142. [Google Scholar] [CrossRef]
- Lu, X.; Kuang, B.; Li, J.; Han, J.; Zhang, Z. Dynamic evolution of regional discrepancies in carbon emissions from agricultural land utilization: Evidence from Chinese provincial data. Sustainability 2018, 10, 552. [Google Scholar] [CrossRef]
- Scandellari, F.; Caruso, G.; Liguori, G.; Meggio, F.; Palese, A.M.; Zanotelli, D.; Tagliavini, M. A survey of carbon sequestration potential of orchards and vineyards in Italy. Eu. J. Hortic. Sci. 2016, 81, 106–114. [Google Scholar] [CrossRef]
- Brahma, B.; Sileshi, G.W.; Nath, A.J.; Das, A.K. Development and evaluation of robust tree biomass equations for rubber tree (Hevea brasiliensis) plantations in India. For. Ecosyst. 2017, 4, 14. [Google Scholar] [CrossRef]
- Kalita, R.M.; Das, A.K.; Nath, A.J. Role of smallholder tea growers in carbon sink management. Curr. Sci. 2019, 116, 1560–1566. [Google Scholar] [CrossRef]
- Seo, Y.J.; Park, J.H.; Cho, D.H.; Choe, S.Y. Study on Carbon Sink Inventory in the Apple Production System; The Research Report of Gyongsangbuk-do Agricultural Research & Extension Service; Gyongsangbuk-do Agricultural Research & Extension Service: Daegu, Republic of Korea, 2012; pp. 25–30, (In Korean with English Abstract). [Google Scholar]
- Jo, H.K.; Park, S.M.; Kim, J.Y.; Park, H.M. Carbon uptake and emissions of apple orchards as a production-type greenspace. J. Korean Inst. Landsc. 2014, 42, 64–72. [Google Scholar] [CrossRef]
- Lee, K.; Lee, C. Estimation of greenhouse gas emissions and removals from fruit tree biomass in Korea: A study on appropriate inventory methodologies. J. Agric. Life Sci. 2022, 56, 151–159. [Google Scholar]
- Intergovernmental Panel on Climate Change (IPCC). Climate Change 2022: Mitigation of Climate Change. Contribution of Working Group III to the Sixth Assessment Report. Chapter 7: Agriculture, Forestry, and Other Land Uses (AFOLU); IPCC: Geneva, Switzerland, 2022. [Google Scholar]
- Mozdzer, T.J.; McGlathery, K.J.; Mills, A.L.; Zieman, J.C. Latitudinal variation in the availability and use of dissolved organic nitrogen in Atlantic coast salt marshes. Ecology 2014, 95, 3293–3303. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef]
- Sakib, S.M. LiDAR Technology—An Overview. IUP J. Electr. Electron. Eng. 2022, 15, 36. [Google Scholar]
- Morgenroth, J.; Gómez, C. Assessment of tree structure using a 3D image analysis technique—A proof of concept. Urban. For. Urban. Green. 2014, 13, 198–203. [Google Scholar] [CrossRef]
- Chen, R.; Li, C.; Yang, G.; Yang, H.; Xu, B.; Yang, X.; Dong, Z. Extraction of crown information from individual fruit tree by UAV LiDAR. Trans. Chin. Soc. Agric. Eng. 2020, 36, 50–59. [Google Scholar]
- Abbas, A.; Zhang, Z.; Zheng, H.; Alami, M.M.; Alrefaei, A.F.; Abbas, Q.; Zhou, L. Drones in plant disease assessment, efficient monitoring, and detection: A way forward to smart agriculture. Agronomy 2023, 13, 1524. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Dong, X.; Kim, W.Y.; Lee, K.H. Drone-based three-dimensional photogrammetry and concave hull by slices algorithm for apple tree volume mapping. J. Biosyst. Eng. 2021, 46, 474–484. [Google Scholar] [CrossRef]
- Di Gennaro, S.F.; Vannini, G.L.; Berton, A.; Dainelli, R.; Toscano, P.; Matese, A. Missing plant detection in vineyards using UAV angled RGB imagery acquired in dormant period. Drones 2023, 7, 349. [Google Scholar] [CrossRef]
- Hobart, M.; Pflanz, M.; Tsoulias, N.; Weltzien, C.; Kopetzky, M.; Schirrmann, M. Fruit detection and yield mass estimation from a UAV-based RGB dense cloud for an apple orchard. Drones 2025, 9, 60. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, G.; Jiang, Y.; Xu, B.; Li, X.; Zhu, Y.; Yang, H. Apple tree branch information extraction from terrestrial laser scanning and backpack-LiDAR. Remote Sens. 2020, 12, 3592. [Google Scholar] [CrossRef]
- Jin, S.; Su, Y.; Song, S.; Xu, K.; Hu, T.; Yang, Q.; Guo, Q. Non-destructive estimation of field maize biomass using terrestrial LiDAR: An evaluation from plot level to individual leaf level. Plant Methods 2020, 16, 69. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.J.; Park, M.Y.; Song, Y.Y.; Sagong, D.H.; Yoon, T.M. Influence of tree height on vegetative growth, productivity, and labour in slender spindle of ‘Fuji’/M.9 apple trees. J. Bio-Environ. Control 2009, 18, 492–501. [Google Scholar]
- Joa, J.H.; Kang, S.B.; Park, Y.S.; Kim, M.S.; Kim, H.N.; Oh, B.S. Effects of water Microspraying, foliar application of calcium carbonate and kaolin solution on sunburn and quality of fruits in Satusma Mandarin. J. Bio-Environ. Control 2022, 31, 261–269. [Google Scholar] [CrossRef]
- Son, Y.M.; Kim, R.H.; Lee, K.H.; Pyo, J.K.; Kim, S.W.; Hwang, J.S.; Park, H. Carbon Emission Factors and Biomass Allometric Equations by Species in Korea; Korea Forest Research Institute: Seoul, Republic of Korea, 2014. [Google Scholar]
- Department of Environmental Horticulture, University of Seoul. Standard Guidelines for the Analysis of Fruit Tree Biomass Assessment; Department of Environmental Horticulture, University of Seoul: Seoul, Republic of Korea, 2024. [Google Scholar]
- Montagnoli, A.; Hudak, A.T.; Raumonen, P.; Lasserre, B.; Terzaghi, M.; Silva, C.A.; Dumroese, R.K. Terrestrial laser scanning and low magnetic field digitization yield similar architectural coarse root traits for 32-year-old Pinus ponderosa trees. Plant Methods 2024, 20, 102. [Google Scholar] [CrossRef] [PubMed]
- Asenova, M.; Donchev, G.; Evangelov, E. Personal laser scanning technology for 3D mapping and forest inventory. Int. Multidiscip. Sci. 2022, 22, 347–354. [Google Scholar]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A new method for segmenting individual trees from the LiDAR point cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Proudman, A.; Ramezani, M.; Digumarti, S.T.; Chebrolu, N.; Fallon, M. Towards real-time forest inventory using handheld LiDAR. Robot. Auton. Syst. 2022, 157, 104240. [Google Scholar] [CrossRef]
- Ko, C.; Kang, J.; Park, J.; Lee, M. Assessing Forest resources with terrestrial and backpack LiDAR: A case study on leaf-on and leaf-off conditions in Gari Mountain, Hongcheon, Republic of Korea. Forests 2024, 15, 19994907. [Google Scholar] [CrossRef]
- Miranda-Fuentes, A.; Llorens, J.; Gamarra-Diezma, J.L.; Gil-Ribes, J.A.; Gil, E. Towards an optimized method of olive tree crown volume measurement. Sensors 2015, 15, 3671–3687. [Google Scholar] [CrossRef] [PubMed]
- Treder, W.; Klamkowski, K.; Tryngiel-Gać, A.; Wójcik, K. Application of ImageJ software in the assessment of flowering Intensity and growth vigor of pear Trees. J. Hortic. Res. 2021, 29, 85–94. [Google Scholar] [CrossRef]
- Lewis-Beck, M.S.; Skalaban, A. The R-squared: Some straight talk. Political Anal. 1990, 2, 153–171. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?—Arguments against avoiding RMSE in the literature. Geosci. Model. Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Pinheiro, J.; Bates, D.; DebRoy, S.; Sarkar, D.; Heisterkamp, S.; Van Willigen, B.; Maintainer, R. Package ‘nlme’. Linear and Nonlinear Mixed Effects Models, Version. 2017, 3, 274. Available online: https://cran.r-project.org/package=nlme (accessed on 15 July 2025).
- Hamner, B.; Frasco, M.; LeDell, E. Package ‘Metrics’; R Foundation for Statistical Computing, 2018. Available online: https://cran.r-project.org/package=Metrics (accessed on 15 July 2025).
- Wong, T.T. Performance evaluation of classification algorithms by k-fold and leave-one-out cross validation. Pattern Recognit. 2015, 48, 2839–2846. [Google Scholar] [CrossRef]
- Dong, N.; Chi, R.; Zhang, W. LiDAR odometry and mapping based on semantic information for maize field. Agronomy 2022, 12, 3107. [Google Scholar] [CrossRef]
- Debnath, S.; Paul, M.; Debnath, T. Applications of LiDAR in agriculture and future research directions. J. Imaging 2023, 9, 57. [Google Scholar] [CrossRef] [PubMed]
- Farhan, S.M.; Yin, J.; Chen, Z.; Memon, M.S. A comprehensive review of LiDAR applications in crop management for precision agriculture. Sensors 2024, 24, 5409. [Google Scholar] [CrossRef] [PubMed]
- Whelan, A.W.; Cannon, J.B.; Bigelow, S.W.; Rutledge, B.T.; Meador, A.J.S. Improving generalized models of forest structure in complex forest types using area-and voxel-based approaches from LiDAR. Remote Sens. Environ. 2023, 284, 113362. [Google Scholar] [CrossRef]
- Nie, X.; Yang, Y.; Yang, L.; Zhou, G. Above-and belowground biomass allocation in shrub biomes across the northeast Tibetan Plateau. PLoS ONE 2016, 11, e0154251. [Google Scholar] [CrossRef] [PubMed]
- Jonson, J.H.; Freudenberger, D. Restore and sequester: Estimating biomass in native Australian woodland ecosystems for their carbon-funded restoration. Aust. J. Bot. 2011, 59, 640–653. [Google Scholar] [CrossRef]
- Yang, S.; Xing, Y.; Xing, T.; Deng, H.; Xi, Z. Multi-sensors fusion SLAM-aided forest plot mapping with backpack dual-LiDAR system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 16051–16070. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Vastaranta, M. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Yang, J.; Swenson, N.G. Height and crown allometries and their relationship with functional traits: An example from a subtropical wet forest. Ecol. Evol. 2023, 13, e9804. [Google Scholar] [CrossRef] [PubMed]
- Martí, B.V.; González, E.F. The influence of mechanical pruning in cost reduction, production of fruit, and biomass waste in citrus orchards. Appl. Eng. Agric. 2010, 26, 531–540. [Google Scholar] [CrossRef]
- Ximenes, F.A.; Gardner, W.D.; Kathuria, A. Proportion of above-ground biomass in commercial logs and residues following the harvest of five commercial forest species in Australia. For. Ecol. Manag. 2008, 256, 335–346. [Google Scholar] [CrossRef]
- Htun, N.M.; Owari, T.; Tsuyuki, S.; Hiroshima, T. Detecting canopy gaps in uneven–aged mixed forests through the combined use of Unmanned Aerial Vehicle imagery and deep learning. Drones 2024, 8, 484. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fruit Tree | Sampling Region | Tree Age | Number of Samples | Year of Sampling | |
|---|---|---|---|---|---|
| State | District/City | ||||
| Apple ‘Fuji’/M.9 variety | Gyeongsangbuk-do | Uiseong district | 6 | 3 | 2023 |
| Yeongju district | 10 | 3 | |||
| Yeongyang district | 14 | 3 | |||
| Gyeongsangbuk-do | Cheongsong district | 4 | 3 | 2024 | |
| Gyeongsangnam-do | Miryang district | 10 | 3 | ||
| Citrus ‘Miyagawa-wase’ satsuma mandarin variety | Jeju Special Self-Governing Province | Seogwipo city | 10 | 3 | 2023 |
| 18 | 3 | ||||
| 45 | 6 | ||||
| Seogwipo city | 19 | 3 | 2024 | ||
| Jeju city | 30 | 2 | |||
| 35 | 2 | ||||
| 40 | 2 | ||||
| Variables | Unit | Min | Max | Mean | SD |
|---|---|---|---|---|---|
| Apple tree | |||||
| Aboveground biomass | kg | 1.73 | 18.87 | 9.91 | 6.10 |
| Belowground biomass | kg | 0.33 | 6.42 | 3.64 | 2.19 |
| Total biomass | kg | 2.06 | 24.03 | 13.56 | 8.11 |
| Citrus tree | |||||
| Aboveground biomass | kg | 17.17 | 98.5 | 43.54 | 20.72 |
| Belowground biomass | kg | 5.8 | 35.26 | 17.52 | 9.19 |
| Total biomass | kg | 26.33 | 132.28 | 61.07 | 29.07 |
| Variables | Unit | Min | Max | Mean | SD |
|---|---|---|---|---|---|
| Apple tree | |||||
| TLS aboveground volume | m3 | 1.03 | 7.53 | 4.52 | 2.02 |
| TLS belowground volume | m3 | 0.02 | 0.75 | 0.32 | 0.19 |
| TLS crown area | m2 | 0.83 | 4.62 | 2.78 | 1.08 |
| Drone crown area | m2 | 3.43 | 11.36 | 7.48 | 2.54 |
| Citrus tree | |||||
| TLS aboveground volume | m3 | 1.98 | 17.51 | 8.51 | 4.20 |
| TLS belowground volume | m3 | 0.07 | 1.31 | 0.52 | 0.34 |
| TLS crown area | m2 | 4.14 | 16.21 | 10.09 | 3.47 |
| Drone crown area | m2 | 6.08 | 29.4 | 16.57 | 7.60 |
| Fruit Tree | Biomass | Equipment/Variable | Equation Model |
|---|---|---|---|
| Apple ‘Fuji’/M.9 variety | Total | TLS/volume | y = 1.8392x1.1649 |
| TLS/crown area | y = 2.2761x1.6223 | ||
| Drone/crown area | y = 0.1608x2.1339 | ||
| Aboveground | TLS/volume | y = 1.9842x0.9692 | |
| TLS/crown area | y = 1.8039x1.5469 | ||
| Drone/crown area | y = 0.1439x2.0354 | ||
| Belowground | TLS/volume | y = 2.5635x−0.01 | |
| TLS/crown area | y = 0.4452x1.8912 | ||
| Drone/crown area | y = 0.0204x2.4846 | ||
| Citrus ‘Miyagawa-wase’ satsuma mandarin variety | Total | TLS/volume | y = 22.858e0.0978x |
| TLS/crown area | y = 9.356x0.79 | ||
| Drone/crown area | y = 12.121x0.5634 | ||
| Aboveground | TLS/volume | y = 17.789e0.0935x | |
| TLS/crown area | y = 6.7186x0.7866 | ||
| Drone/crown area | y = 8.8945x0.5526 | ||
| Belowground | TLS/volume | y = 15.571x0.0113 | |
| TLS/crown area | y = 2.4491x0.8181 | ||
| Drone/crown area | y = 2.8608x0.6253 |
| Fruit Tree | Biomass | Equipment/Variable | R2 | RMSE | RMSE% | Bias | Bias% |
|---|---|---|---|---|---|---|---|
| Apple ‘Fuji’/M.9 variety | Total | TLS/volume | 0.704 | 0.454 | 4.019 | 0.087 | 1.607 |
| TLS/crown area | 0.537 | 0.645 | 4.758 | −0.202 | −3.142 | ||
| Drone/crown area | 0.623 | 0.544 | 4.092 | −0.151 | −2.736 | ||
| Aboveground | TLS/volume | 0.725 | 0.523 | 5.279 | 0.134 | 2.573 | |
| TLS/crown area | 0.553 | 0.648 | 6.546 | −0.231 | −3.564 | ||
| Drone/crown area | 0.630 | 0.560 | 5.658 | −0.251 | −4.486 | ||
| Belowground | TLS/volume | 0.02 | 1.367 | 37.540 | −0.558 | −4.079 | |
| TLS/crown area | 0.391 | 0.724 | 19.892 | −0.743 | −10.23 | ||
| Drone/crown area | 0.485 | 0.618 | 16.961 | −0.332 | −5.384 | ||
| Citrus ‘Miyagawa-wase’ satsuma mandarin variety | Total | TLS/volume | 0.865 | 4.252 | 6.964 | −0.248 | −5.836 |
| TLS/crown area | 0.303 | 9.319 | 15.262 | 0.832 | 8.934 | ||
| Drone/crown area | 0.325 | 9.225 | 15.107 | 7.757 | 24.08 | ||
| Aboveground | TLS/volume | 0.865 | 4.425 | 10.163 | 1.975 | 18.08 | |
| TLS/crown area | 0.301 | 9.330 | 21.428 | −32.372 | −54.693 | ||
| Drone/crown area | 0.320 | 9.205 | 21.140 | −18.51 | −40.108 | ||
| Belowground | TLS/volume | 0.012 | 14.970 | 85.426 | −22.802 | −35.231 | |
| TLS/crown area | 0.253 | 9.793 | 55.883 | −13.06 | −33.336 | ||
| Drone/crown area | 0.274 | 9.777 | 55.793 | 1.979 | 16.248 |
| Fruit Tree | Model | R2 | RMSE | MAE |
|---|---|---|---|---|
| Apple ‘Fuji’/M.9 variety | Total biomass~TLS_TV | 0.652 | 1.152 | 0.922 |
| Total biomass~TLS_crown area | 0.365 | 0.828 | 0.598 | |
| Total biomass~Drone_crown area | 0.488 | 1.754 | 1.324 | |
| AGB~TLS_AGV | 0.640 | 1.171 | 0.944 | |
| AGB~TLS_crown area | 0.323 | 0.855 | 0.633 | |
| AGB~Drone_crown area | 0.455 | 1.809 | 1.425 | |
| BGB~TLS_BGV | >0.01 | 2.645 | 2.269 | |
| BGB~TLS_crown area | 0.219 | 0.919 | 0.667 | |
| BGB~Drone_crown area | 0.362 | 1.958 | 1.509 | |
| Citrus ‘Miyagawa-wase’ satsuma mandarin variety | Total biomass~TLS_TV | 0.846 | 11.119 | 9.148 |
| Total biomass~TLS_crown area | 0.046 | 27.672 | 23.652 | |
| Total biomass~Drone_crown area | 0.018 | 28.073 | 22.725 | |
| AGB~TLS_AGV | 0.836 | 8.163 | 6.885 | |
| AGB~TLS_crown area | 0.039 | 19.798 | 16.119 | |
| AGB~Drone_crown area | 0.037 | 19.816 | 15.739 | |
| BGB~TLS_BGV | >0.01 | 9.333 | 7.882 | |
| BGB~TLS_crown area | 0.015 | 8.888 | 7.659 | |
| BGB~Drone_crown area | >0.01 | 9.219 | 7.740 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.-K.; Lee, Y.-J.; Lee, D.-Y.; Park, J.-S.; Lee, C.-B. Biomass Estimation of Apple and Citrus Trees Using Terrestrial Laser Scanning and Drone-Mounted RGB Sensor. Remote Sens. 2025, 17, 2554. https://doi.org/10.3390/rs17152554
Lee M-K, Lee Y-J, Lee D-Y, Park J-S, Lee C-B. Biomass Estimation of Apple and Citrus Trees Using Terrestrial Laser Scanning and Drone-Mounted RGB Sensor. Remote Sensing. 2025; 17(15):2554. https://doi.org/10.3390/rs17152554
Chicago/Turabian StyleLee, Min-Ki, Yong-Ju Lee, Dong-Yong Lee, Jee-Su Park, and Chang-Bae Lee. 2025. "Biomass Estimation of Apple and Citrus Trees Using Terrestrial Laser Scanning and Drone-Mounted RGB Sensor" Remote Sensing 17, no. 15: 2554. https://doi.org/10.3390/rs17152554
APA StyleLee, M.-K., Lee, Y.-J., Lee, D.-Y., Park, J.-S., & Lee, C.-B. (2025). Biomass Estimation of Apple and Citrus Trees Using Terrestrial Laser Scanning and Drone-Mounted RGB Sensor. Remote Sensing, 17(15), 2554. https://doi.org/10.3390/rs17152554