
Methodology for Evaluating Collision Avoidance Maneuvers Using Aerodynamic Control
 , and
, and
Abstract
1. Introduction
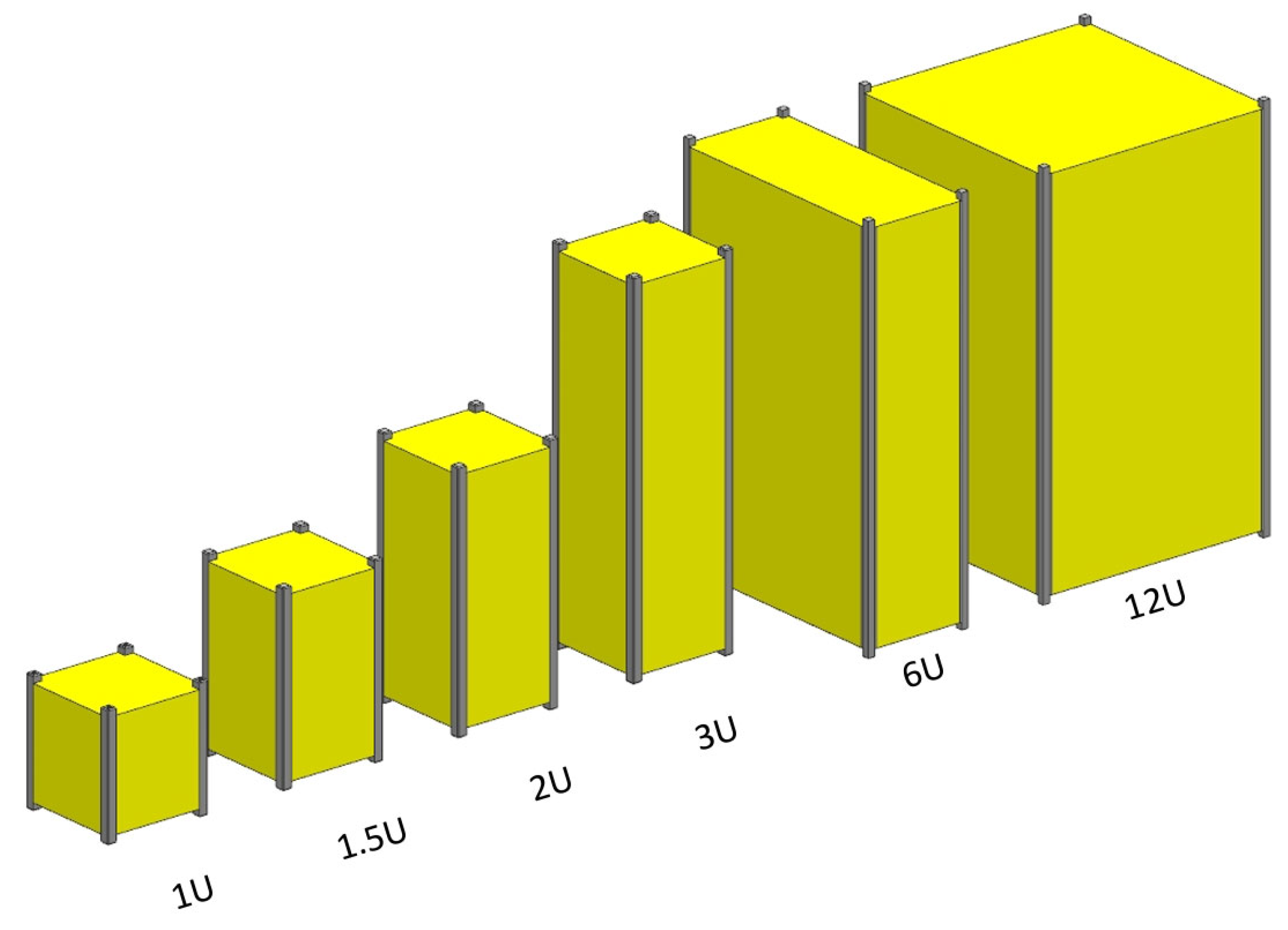
1.1. Nanosatellites and CubeSats
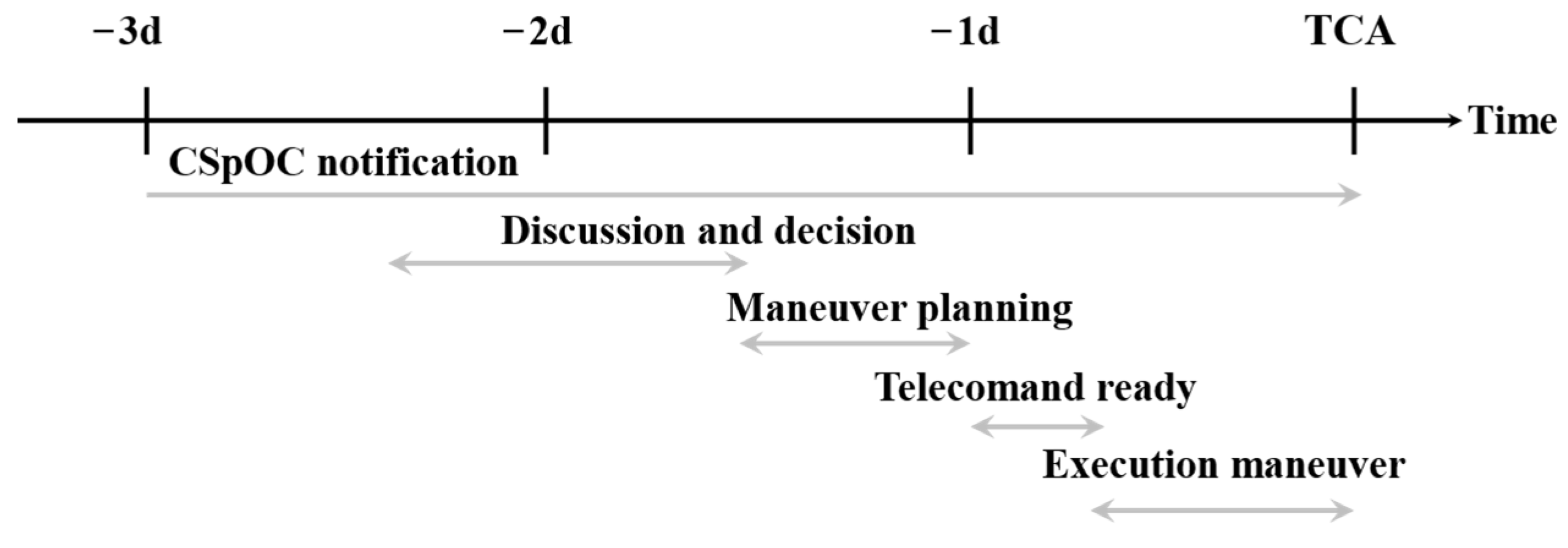
1.2. Space Debris, Collision Avoidance, and CDMs
1.3. ADCS and Collision Avoidance
1.4. Satellite Drag Modeling
- Panel methods for convex shapes;
- Ray-Tracing Panel methods (RTP) for shadowed surfaces;
- Test-Particle Monte Carlo (TPMC) for modeling multiple reflections;
- Direct Simulation Monte Carlo (DSMC) for simulating intermolecular collisions in transitional regimes.
1.5. Aerodynamic Control
1.6. Atmospheric Models
1.7. Objectives of the Research
2. Materials and Methods
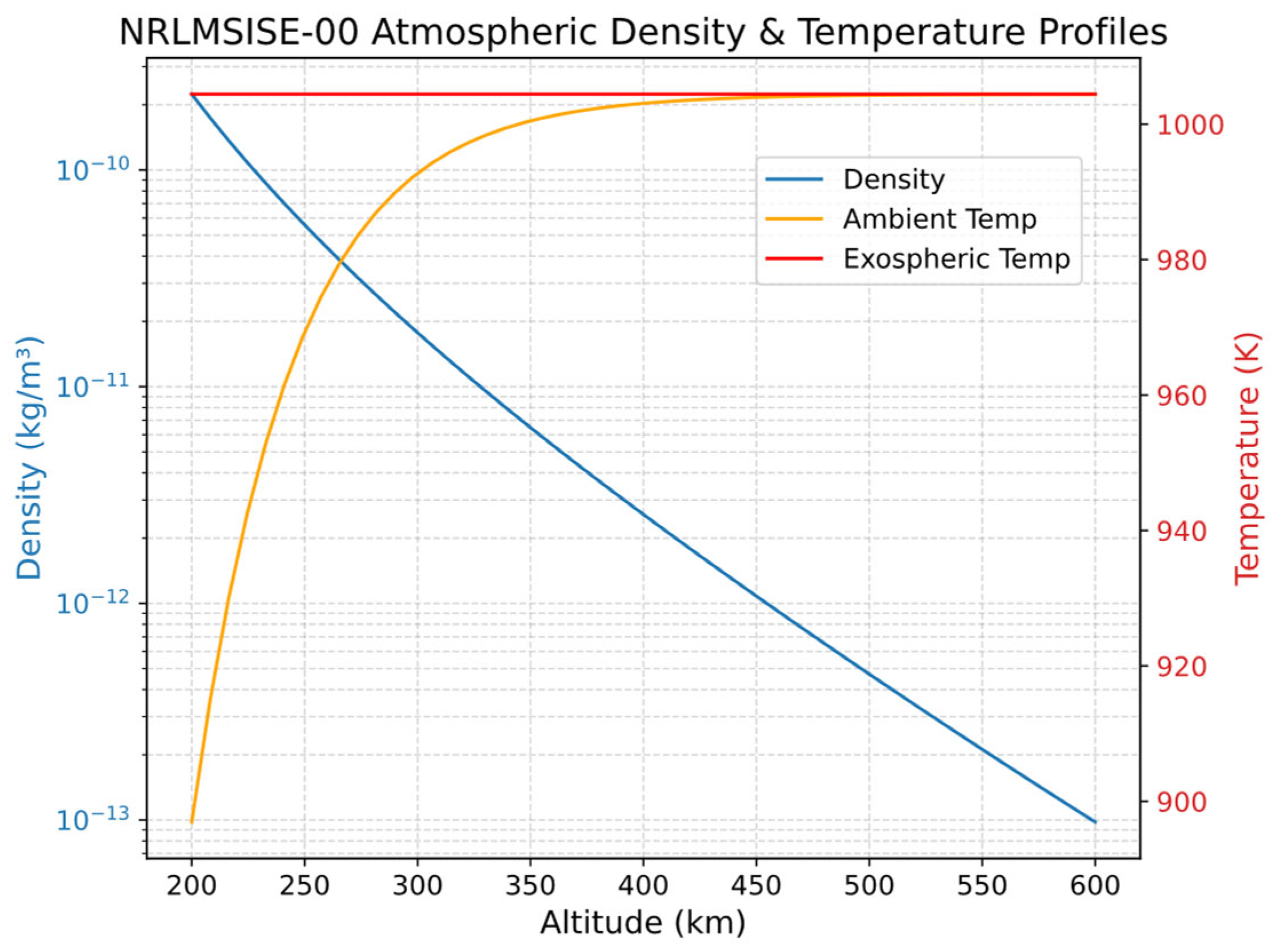
- Atmospheric Characterization: The first step involves retrieving atmospheric properties using the NRLMSISE-00 model. This model provides essential environmental parameters such as neutral temperature, total mass density, and the number densities of major atmospheric species. These values are computed based on inputs including altitude, geographic coordinates, and solar and geomagnetic activity indices (F10.7 and Ap), and are fundamental for subsequent aerodynamic calculations.
- Aerodynamic Coefficient Estimation: In the second step, the panel method is employed to compute the drag and lift coefficients. This method is chosen for its simplicity and efficiency, and it uses the atmospheric parameters obtained in step one as inputs. The panel method models the spacecraft surface as a collection of flat panels, allowing for the estimation of aerodynamic forces acting on each panel and, by extension, on the entire spacecraft.
- Maneuver Simulation: The third step consists of simulating a collision avoidance maneuver using mission analysis software such as Systems Tool Kit (STK) [25]. Different satellite orientations are considered to evaluate how changes in attitude affect the aerodynamic response and the resulting orbital displacement.
- Effect Evaluation: Finally, the fourth step involves computing the net effect of the collision avoidance maneuver. This is performed by combining the aerodynamic coefficients (Cd and Cl) obtained in step two with the maneuver parameters derived from the STK simulation in step three. The result is a quantitative assessment of how the maneuver alters the satellite’s trajectory, enabling evaluation of its effectiveness in reducing collision risk.
2.1. Atmospheric Characterization
2.2. Coefficients Estimation
- is the normal vector of panel i;
- is the velocity vector of the spacecraft relative to the atmosphere;
- Ai is the area of panel i;
- Aref is the reference area for normalization.
2.3. Maneuver Simulation
- is the atmospheric density (kg/m3);
- V is the satellite orbital velocity (m/s);
- Caero is the aerodynamic coefficient of lift or drag (-);
- Aref is the reference area (m2).
- PSRP is solar radiation pressure at 1 AU (approximately 4.56 × 10−6 Pa);
- SSRP is the solar pressure coefficient (-);
- Aref is the reference area (m2).
2.4. Effect Evaluation
3. Results
3.1. Atmospheric Parameters
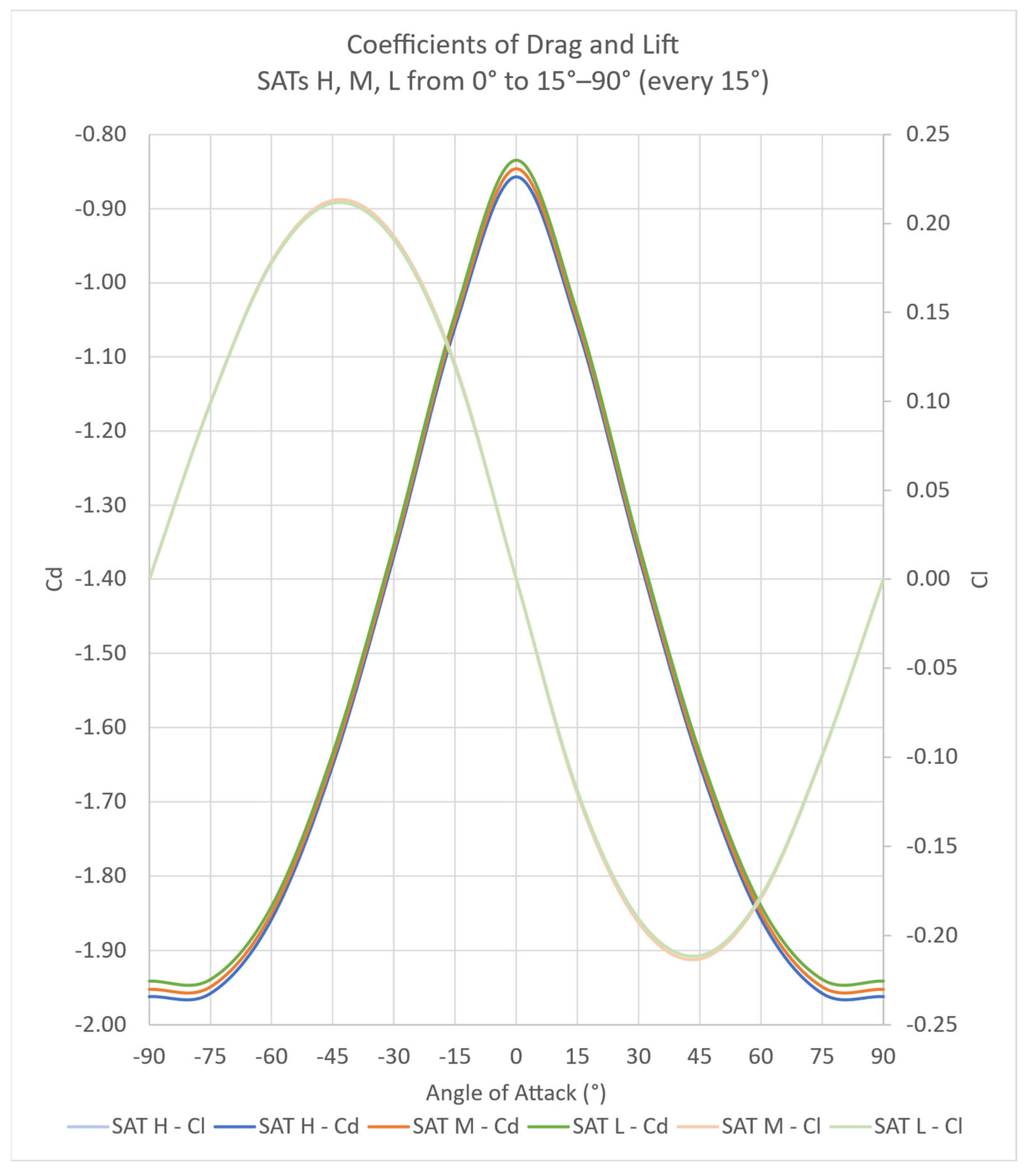
3.2. Aerodynamic and Solar Pressure Coefficients
3.2.1. SAT-H
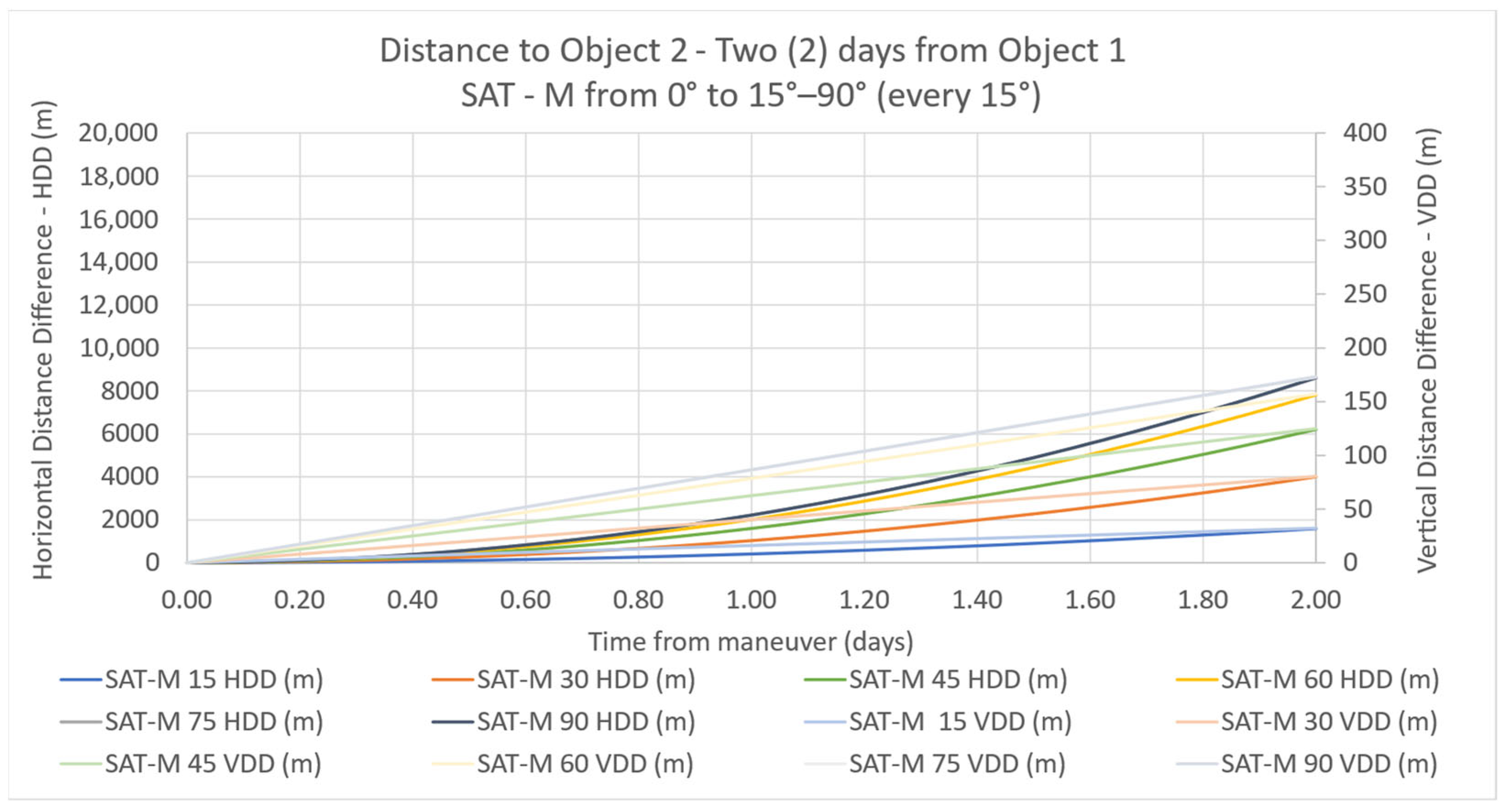
3.2.2. SAT-M
3.2.3. SAT-L
3.3. Maneuver Configuration
3.3.1. SAT-H
3.3.2. SAT-M
3.3.3. SAT-L
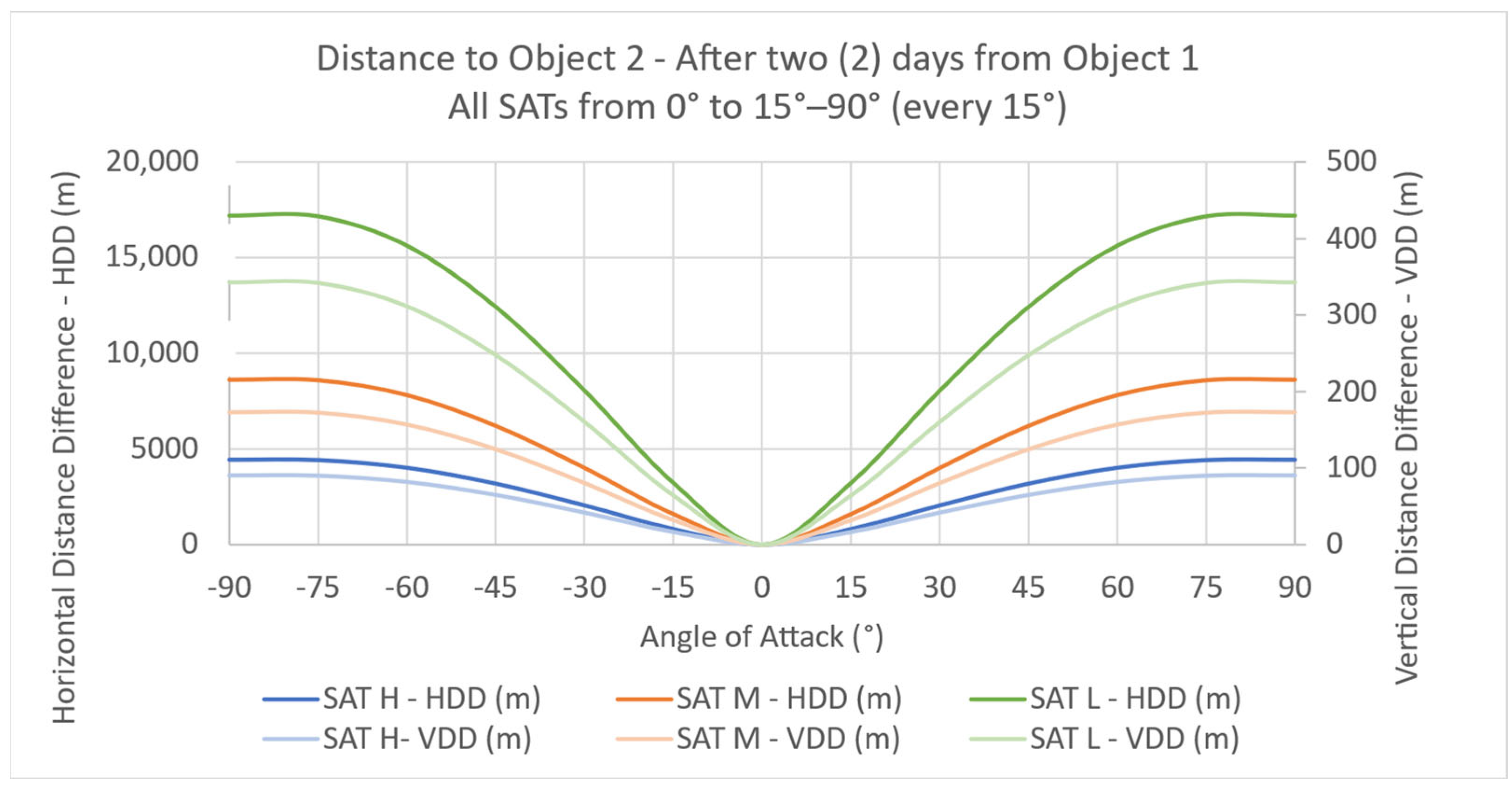
3.4. Efects of Maneuvers
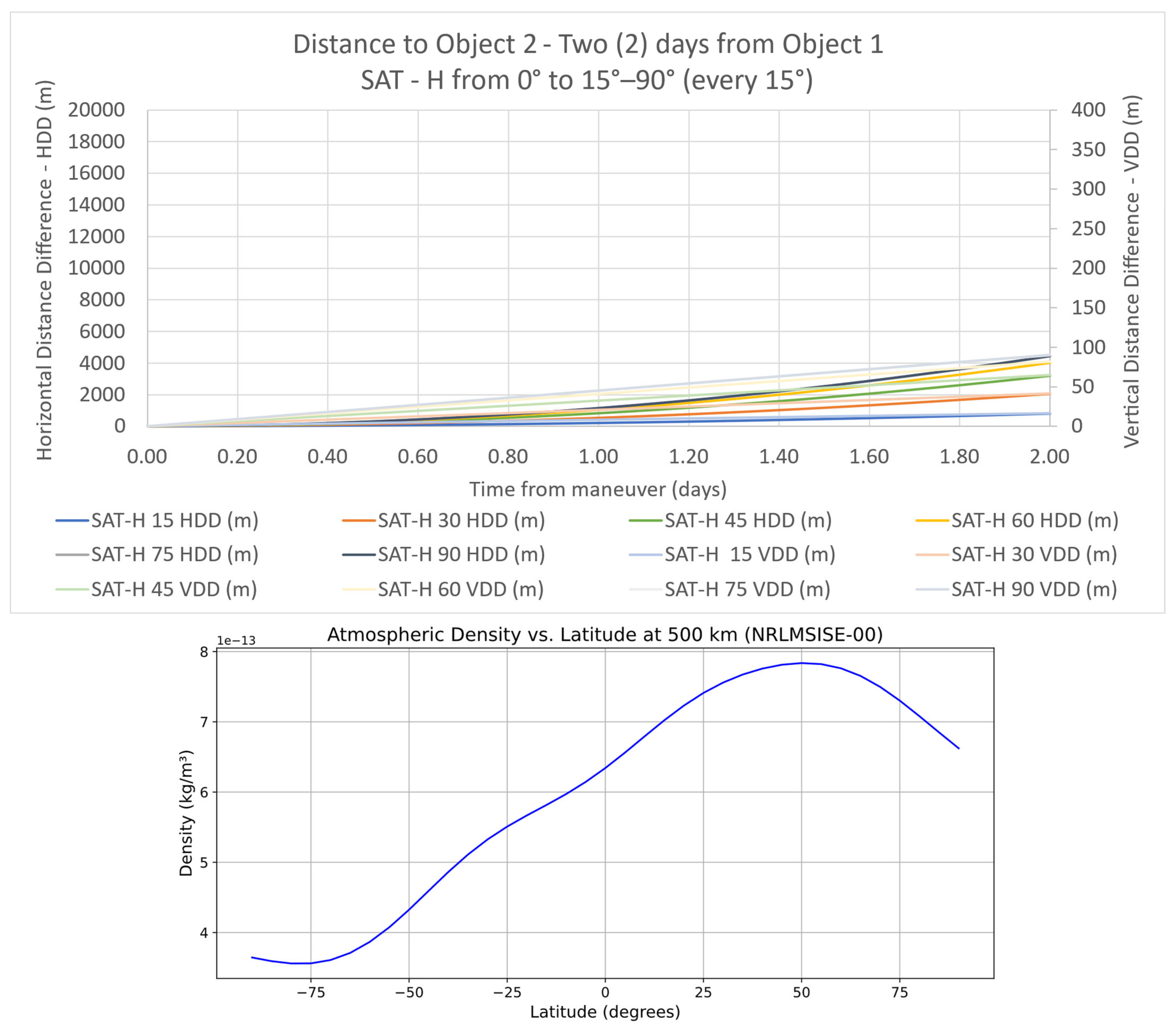
3.4.1. SAT-H
3.4.2. SAT-M
3.4.3. SAT-L
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LEO | Low Earth Orbit |
| ADCS | Attitude Determination and Control System |
| U | Unit |
| STK | System Tool Kit |
| CDM | Conjunction Data Message |
| ESA | European Space Agency |
| IADC | Inter-Agency Space Debris Coordination Committee |
| COPUOS | Committee on the Peaceful Uses of Outer Space |
| ISO | International Organisation for Standardisation |
| NASA | National Aeronautics and Space Administration |
| JSpOC | Joint Space Operations Center |
| SSN | Space Surveillance Network |
| ISS | International Space Station |
| CDS | CubeSat Design Specification |
| UAV | Unmanned Aerial Vehicle |
| SGP4 | Standard General Perturbations Satellite Orbit Model 4 |
| HPOP | High-Precision Orbit Propagator |
| CA | Conjunction Assessment |
| TCA | Time of Closest Approach |
| LVLH | Local Vertical, Local Horizontal |
| TLE | Two-Line Element |
| VDD | Vertical Distance Difference |
| HDD | Horizontal Distance Difference |
| VNC | Velocity Normal Co-Normal |
References
- Li, Z.; Li, H.; Li, C. ELVO-Based Autonomous Satellite Collision Avoidance with Multiple Debris. Aerospace 2025, 12, 402. [Google Scholar] [CrossRef]
- Alén Space. A Basic Guide to Nanosatellites. Available online: https://alen.space/basic-guide-nanosatellites/ (accessed on 22 January 2025).
- NASA CubeSats Overview. Available online: https://www.nasa.gov/what-are-smallsats-and-cubesats/ (accessed on 22 January 2025).
- CubeSat Program. The CubeSat Standard. Available online: https://www.cubesat.org/about/ (accessed on 22 January 2025).
- CubeSat Program. CubeSat Design Specification Rev. 14.1. Available online: https://www.cubesat.org/s/CDS-REV14_1-2022-02-09.pdf (accessed on 22 January 2025).
- CCSDS. CCSDS 508.0-B-1: Conjunction Data Message (CDM); CCSDS: Washington, WA, USA, 2013. [Google Scholar]
- Kessler, D.; Cour-Palais, B. Collision Frequency of Artificial Satellites: The Creation of a Debris Belt. J. Geophys. Res. Space Phys. 1978, 83, 2637–2646. [Google Scholar] [CrossRef]
- Liou, J.-C. Active Debris Removal and the Challenges for Environment Remediation. NASA Orbital Debris Quarterly News 2009. Available online: https://ntrs.nasa.gov/citations/20120013266 (accessed on 8 July 2025).
- NASA. Space Debris and Human Spacecraft. Available online: https://www.nasa.gov/mission_pages/station/news/orbital_debris.html (accessed on 25 January 2025).
- GISTDA. Collision Avoidance Strategies Conjunction Risk Assessment Analysis Tool; GISTDA: Bangkok, Thailand, 2019. [Google Scholar]
- Sun, X.; Wang, Y.; Su, J.; Li, J.; Xu, M.; Bai, S. Relative orbit transfer using constant-vector thrust acceleration. Acta Astronaut. 2025, 229, 715–735. [Google Scholar] [CrossRef]
- Smith, T.K.; Akagi, J.; Droge, G. Model predictive control for formation flying based on D’Amico relative orbital elements. Astrodynamics 2025, 9, 143–163. [Google Scholar] [CrossRef]
- Zhou, H.; Jiao, B.; Dang, Z.; Yuan, J. Parametric formation control of multiple nanosatellites for cooperative observation of China Space Station. Astrodynamics 2024, 8, 77–95. [Google Scholar] [CrossRef]
- González-Rodríguez, D.; Orgeira-Crespo, P.; Cappelletti, C.; Aguado-Agelet, F. Methodology for CubeSat Debris Collision Avoidance Based on Its Active ADCS System. Appl. Sci. 2023, 13, 12388. [Google Scholar] [CrossRef]
- Prieto, D.M.; Graziano, B.P.; Roberts, P.C.E. Spacecraft Drag Modelling. Prog. Aerosp. Sci. 2014, 64, 56–65. [Google Scholar] [CrossRef]
- Aranda, D.; Gago, P.; Pastor, A.; Escobar, D. Drag augmentation for collision avoidance in LEO. Adv. Space Res. 2025, 75, 6882–6895. [Google Scholar] [CrossRef]
- Traub, C.; Ben-Larbi, M.K.; Turco, F.; Siestrup, A.J.G.; Harbeck, J.; Stoll, E.; Lück, D. Revealing the impact of operational constraints on aerodynamic collision avoidance maneuvers: In-flight results from the BEESAT-4 CubeSat. Acta Astronaut. 2025, 234, 296–313. [Google Scholar] [CrossRef]
- Gaglio, E.; Traub, C.; Sannino, A.; Mungiguerra, S.; Turco, F.; Fasoulas, S.; Savino, R.; Bevilacqua, R. Quasi-optimal Guidance and Control in Very Low Earth Orbit via Deep Learning for Drag-Based Collision Avoidance. NASA/GSFC CCMC, NRLMSISE-00 Atmospheric Model. Available online: https://ccmc.gsfc.nasa.gov/modelweb/models/nrlmsise00.php (accessed on 22 January 2025).
- Picone, J.M.; Hedin, A.E.; Drob, D.P.; Aikin, A.C. NRLMSISE-00 empirical model of the atmosphere: Statistical comparisons and scientific issues. J. Geophys. Res. A Space Phys. 2002, 107, SIA 15-1–SIA 15-16. [Google Scholar] [CrossRef]
- St-Bender, S. Pynrlmsise00: Python Interface for the NRLMSISE-00 Empirical Atmosphere Model. Version 0.1.2. 2023. Available online: https://github.com/st-bender/pynrlmsise00 (accessed on 25 September 2024).
- ECSS-E-10-04A; Space Engineering: Space Environment. ESA-ESTEC: Noordwijk, The Netherlands, 2008.
- Bowman, B.R.; Tobiska, W.K.; Marcos, F.A.; Valladares, C. The JB2006 empirical thermospheric density model. J. Atmos. Sol.-Terr. Phys. 2008, 70, 774–793. [Google Scholar] [CrossRef]
- Vallado, D.A.; Finkleman, D. A critical assessment of satellite drag and atmospheric density modeling. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar]
- Ansys. Systems Tool Kit (STK). Available online: https://www.agi.com/products/stk (accessed on 22 July 2024).
- Crisp, N.H.; Roberts, P.C.E.; Hanessian, V.; Sulliotti-Linner, V.; Herdrich, G.H.; García-Almiñana, D.; Kataria, D.; Seminari, S. A method for the experimental characterisation of novel drag-reducing materials for very low Earth orbits using the Satellite for Orbital Aerodynamics Research (SOAR) mission. CEAS Space J. 2022, 14, 655–674. [Google Scholar] [CrossRef]
- Marianowski, C.; Traub, C.; Pfeiffer, M.; Fasoulas, S. ADBSat: Methodology of a Novel Panel Method Tool for Aerodynamic Analysis of Satellites. Comput. Phys. Commun. 2022, 272, 108244. [Google Scholar]
- Marianowski, C.; Traub, C.; Pfeiffer, M.; Fasoulas, S. ADBSat: Verification and Validation of a Novel Panel Method for Quick Aerodynamic Analysis of Satellites. Comput. Phys. Commun. 2023, 287, 108327. [Google Scholar]
- Verniani, F. The energy accommodation coefficient of satellite surfaces and its effects on drag. Planet. Space Sci. 1965, 13, 929–941. [Google Scholar]
- Zhao, H.; Levin, D.A. Drag and thermal accommodation coefficients of space materials measured in atomic oxygen environment. J. Spacecr. Rocket. 2015, 52, 876–883. [Google Scholar]
- Sutton, K.; Graves, R.A., Jr. A General Stagnation-Point Convective Heating Equation for Arbitrary Gas Mixtures; NASA Technical Report R-376; NASA: Washington, DC, USA, 1971.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit | Mean Density (kg/m3) | Mean Temperature (K) | Mean Molecular Mass (g/mol) |
|---|---|---|---|
| SAT-H | 5.155 × 10−13 | 1001.45 | 3.96 |
| SAT-M | 9.924 × 10−13 | 1001.34 | 4.23 |
| SAT-L | 1.967 × 10−12 | 1001.07 | 4.56 |
| Angle of Attack (°) | (−) | (−) | (−) |
|---|---|---|---|
| −90 | −0.700 | 0 | 0 |
| −75 | −0.698 | 0 | −0.067 |
| −60 | −0.643 | 0 | −0.115 |
| −45 | −0.550 | 0 | −0.133 |
| −30 | −0.437 | 0 | −0.115 |
| −15 | −0.325 | 0 | −0.067 |
| 0 | −0.233 | 0 | 0.000 |
| 15 | −0.325 | 0 | 0.067 |
| 30 | −0.437 | 0 | 0.115 |
| 45 | −0.550 | 0 | 0.133 |
| 60 | −0.643 | 0 | 0.115 |
| 75 | −0.698 | 0 | 0.067 |
| 90 | −0.700 | 0 | 0 |
| Angle of Attack (°) | (−) | (−) | (−) |
|---|---|---|---|
| −90 | −1.262 | 0 | 0 |
| −75 | −1.260 | 0 | −0.033 |
| −60 | −1.215 | 0 | −0.064 |
| −45 | −1.101 | 0 | −0.081 |
| −30 | −0.931 | 0 | −0.079 |
| −15 | −0.734 | 0 | −0.056 |
| 0 | −0.623 | 0 | 0.000 |
| 15 | −0.734 | 0 | 0.056 |
| 30 | −0.931 | 0 | 0.079 |
| 45 | −1.101 | 0 | 0.081 |
| 60 | −1.215 | 0 | 0.064 |
| 75 | −1.260 | 0 | 0.033 |
| 90 | −1.262 | 0 | 0 |
| Angle of Attack (°) | (−) | (−) | (−) |
|---|---|---|---|
| −90 | −1.252 | 0 | 0 |
| −75 | −1.251 | 0 | −0.033 |
| −60 | −1.206 | 0 | −0.063 |
| −45 | −1.093 | 0 | −0.080 |
| −30 | −0.924 | 0 | −0.077 |
| −15 | −0.725 | 0 | −0.054 |
| 0 | −0.613 | 0 | 0.000 |
| 15 | −0.725 | 0 | 0.054 |
| 30 | −0.924 | 0 | 0.077 |
| 45 | −1.093 | 0 | 0.080 |
| 60 | −1.206 | 0 | 0.063 |
| 75 | −1.251 | 0 | 0.033 |
| 90 | −1.252 | 0 | 0 |
| Angle of Attack (°) | (−) | (−) | (−) |
|---|---|---|---|
| −90 | −1.241 | 0 | 0 |
| −75 | −1.241 | 0 | −0.032 |
| −60 | −1.197 | 0 | −0.062 |
| −45 | −1.085 | 0 | −0.078 |
| −30 | −0.916 | 0 | −0.075 |
| −15 | −0.717 | 0 | −0.053 |
| 0 | −0.601 | 0 | 0.000 |
| 15 | −0.717 | 0 | 0.053 |
| 30 | −0.916 | 0 | 0.075 |
| 45 | −1.085 | 0 | 0.078 |
| 60 | −1.197 | 0 | 0.062 |
| 75 | −1.241 | 0 | 0.032 |
| 90 | −1.241 | 0 | 0 |
| Angle of Attack (°) | (N) | (N) | (N) |
|---|---|---|---|
| −90 | −2.23 × 10−7 | 0 | 0 |
| −75 | −2.23 × 10−7 | 0 | −2.13 × 10−8 |
| −60 | −2.05 × 10−7 | 0 | −3.69 × 10−8 |
| −45 | −1.75 × 10−7 | 0 | −4.26 × 10−8 |
| −30 | −1.39 × 10−7 | 0 | −3.69 × 10−8 |
| −15 | −1.04 × 10−7 | 0 | 2.13 × 10−8 |
| 0 | −7.45 × 10−8 | 0 | 0.00 × 100 |
| 15 | −1.04 × 10−7 | 0 | 2.13 × 10−8 |
| 30 | −1.39 × 10−7 | 0 | 3.69 × 10−8 |
| 45 | −1.75 × 10−7 | 0 | 4.26 × 10−8 |
| 60 | −2.05 × 10−7 | 0 | 3.69 × 10−8 |
| 75 | −2.23 × 10−7 | 0 | 2.13 × 10−8 |
| 90 | −2.23 × 10−7 | 0 | 0 |
| Angle of Attack (°) | (N) | (N) | (N) |
|---|---|---|---|
| −90 | −2.05 × 10−6 | 0 | −8.40 × 10−23 |
| −75 | −2.05 × 10−6 | 0 | −1.04 × 10−7 |
| −60 | −1.94 × 10−6 | 0 | −1.88 × 10−7 |
| −45 | −1.73 × 10−6 | 0 | −2.25 × 10−7 |
| −30 | −1.43 × 10−6 | 0 | −2.04 × 10−7 |
| −15 | −1.11 × 10−6 | 0 | −1.28 × 10−7 |
| 0 | −8.96 × 10−6 | 0 | 0.00 × 100 |
| 15 | −1.11 × 10−6 | 0 | 1.28 × 10−7 |
| 30 | −1.43 × 10−6 | 0 | 2.04 × 10−7 |
| 45 | −1.73 × 10−6 | 0 | 2.25 × 10−7 |
| 60 | −1.94 × 10−6 | 0 | 1.88 × 10−7 |
| 75 | −2.05 × 10−6 | 0 | 1.04 × 10−7 |
| 90 | −2.05 × 10−6 | 0 | 8.40 × 10−23 |
| Angle of Attack (°) | (N) | (N) | (N) |
|---|---|---|---|
| −90 | −3.95 × 10−6 | 0 | −1.65 × 10−22 |
| −75 | −3.95 × 10−6 | 0 | −2.01 × 10−7 |
| −60 | −3.74 × 10−6 | 0 | −3.62 × 10−7 |
| −45 | −3.33 × 10−6 | 0 | −4.31 × 10−7 |
| −30 | −2.75 × 10−6 | 0 | −3.90 × 10−7 |
| −15 | −2.13 × 10−6 | 0 | −2.44 × 10−7 |
| 0 | −1.71 × 10−6 | 0 | 0.00 × 100 |
| 15 | −2.13 × 10−6 | 0 | 2.44 × 10−7 |
| 30 | −2.75 × 10−6 | 0 | 3.90 × 10−7 |
| 45 | −3.33 × 10−6 | 0 | 4.31 × 10−7 |
| 60 | −3.74 × 10−6 | 0 | 3.62 × 10−7 |
| 75 | −3.95 × 10−6 | 0 | 2.01 × 10−7 |
| 90 | −3.95 × 10−6 | 0 | 1.65 × 10−22 |
| Angle of Attack (°) | (N) | (N) | (N) |
|---|---|---|---|
| −90 | −7.84 × 10−6 | 0 | −3.28 × 10−22 |
| −75 | −7.83 × 10−6 | 0 | −3.99 × 10−7 |
| −60 | −7.43 × 10−6 | 0 | −7.18 × 10−7 |
| −45 | −6.60 × 10−6 | 0 | −8.53 × 10−7 |
| −30 | −5.46 × 10−6 | 0 | −7.70 × 10−7 |
| −15 | −4.21 × 10−6 | 0 | −4.81 × 10−7 |
| 0 | −3.37 × 10−6 | 0 | 0.00 × 100 |
| 15 | −4.21 × 10−6 | 0 | 4.81 × 10−7 |
| 30 | −5.46 × 10−6 | 0 | 7.70 × 10−7 |
| 45 | −6.60 × 10−6 | 0 | 8.53 × 10−7 |
| 60 | −7.43 × 10−6 | 0 | 7.18 × 10−7 |
| 75 | −7.83 × 10−6 | 0 | 3.99 × 10−7 |
| 90 | −7.84 × 10−6 | 0 | 3.28 × 10−22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González Rodríguez, D.; Orgeira-Crespo, P.; Nuñez-Ortuño, J.M.; Aguado-Agelet, F. Methodology for Evaluating Collision Avoidance Maneuvers Using Aerodynamic Control. Remote Sens. 2025, 17, 2437. https://doi.org/10.3390/rs17142437
González Rodríguez D, Orgeira-Crespo P, Nuñez-Ortuño JM, Aguado-Agelet F. Methodology for Evaluating Collision Avoidance Maneuvers Using Aerodynamic Control. Remote Sensing. 2025; 17(14):2437. https://doi.org/10.3390/rs17142437
Chicago/Turabian StyleGonzález Rodríguez, Desiree, Pedro Orgeira-Crespo, Jose M. Nuñez-Ortuño, and Fernando Aguado-Agelet. 2025. "Methodology for Evaluating Collision Avoidance Maneuvers Using Aerodynamic Control" Remote Sensing 17, no. 14: 2437. https://doi.org/10.3390/rs17142437
APA StyleGonzález Rodríguez, D., Orgeira-Crespo, P., Nuñez-Ortuño, J. M., & Aguado-Agelet, F. (2025). Methodology for Evaluating Collision Avoidance Maneuvers Using Aerodynamic Control. Remote Sensing, 17(14), 2437. https://doi.org/10.3390/rs17142437