
A Terrain-Constrained Cross-Correlation Matching Method for Laser Footprint Geolocation





Abstract
1. Introduction
2. Materials and Methods
2.1. Simulation of Spaceborne Laser Echo
2.2. TC-Match
2.3. Evaluation Strategy for TC-Match Geolocation Performance
- (1)
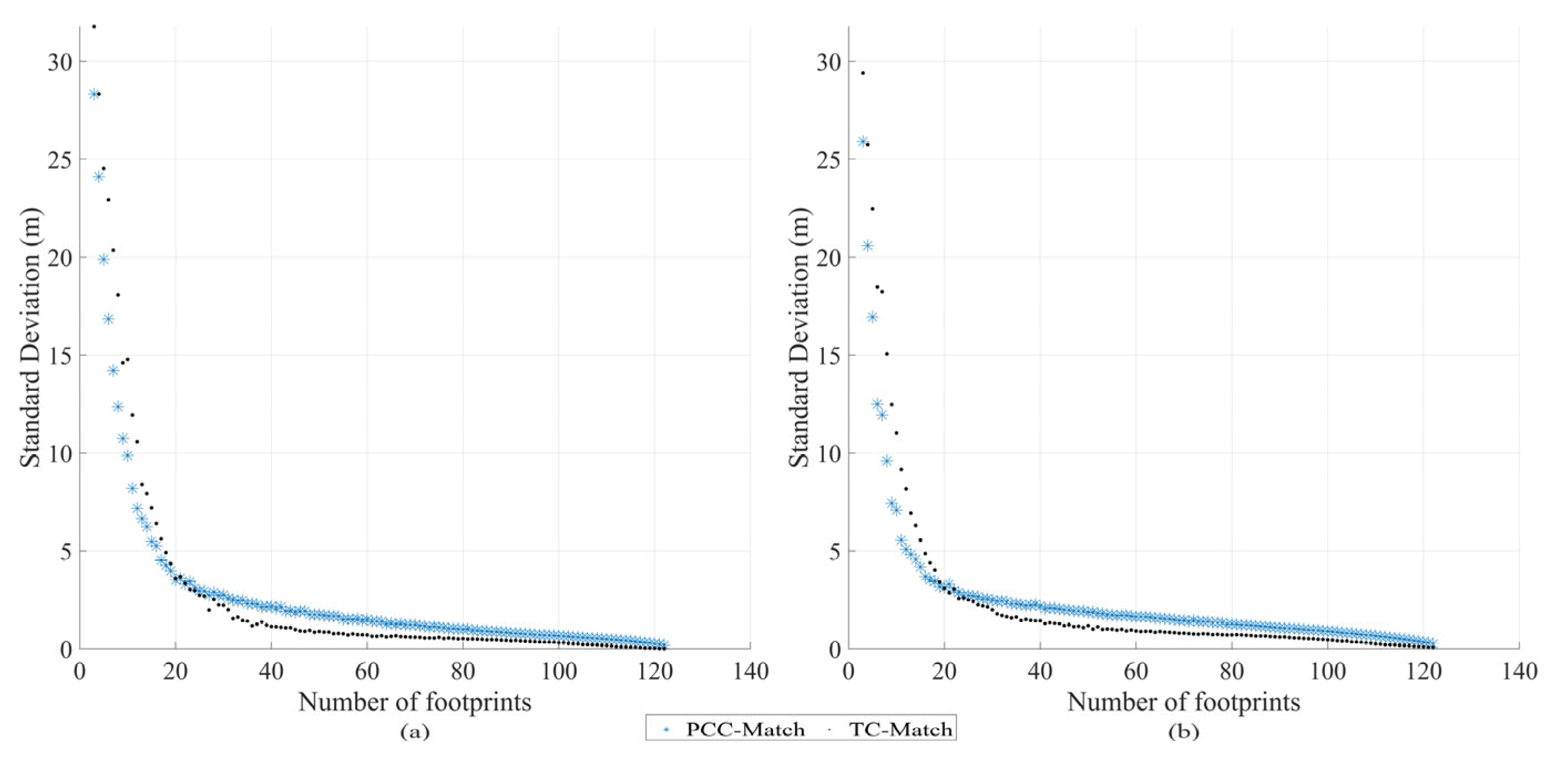
- Section 3.2.1 introduces a random resampling strategy that assesses geolocation stability with varying sample sizes based on the number of available footprints. For each footprint count, 10,000 repeated trials were performed. The resulting offset distributions were analyzed in terms of their convergence behavior, means, and standard deviations and were compared with those obtained using the conventional PCC-Match method, thereby validating the improved robustness and consistency of TC-Match.
- (2)
- As presented in Section 3.2.2, coordinate correction was applied based on the estimated geolocation results, and the method’s capability to mitigate systematic error was evaluated. Key indicators included the mean absolute elevation residual, the standard deviation, and the distribution characteristics of the residuals, which were analyzed through Gaussian fitting. A comparison with PCC-Match was also conducted to highlight the advantages of TC-Match in reducing residual errors and suppressing systematic bias.
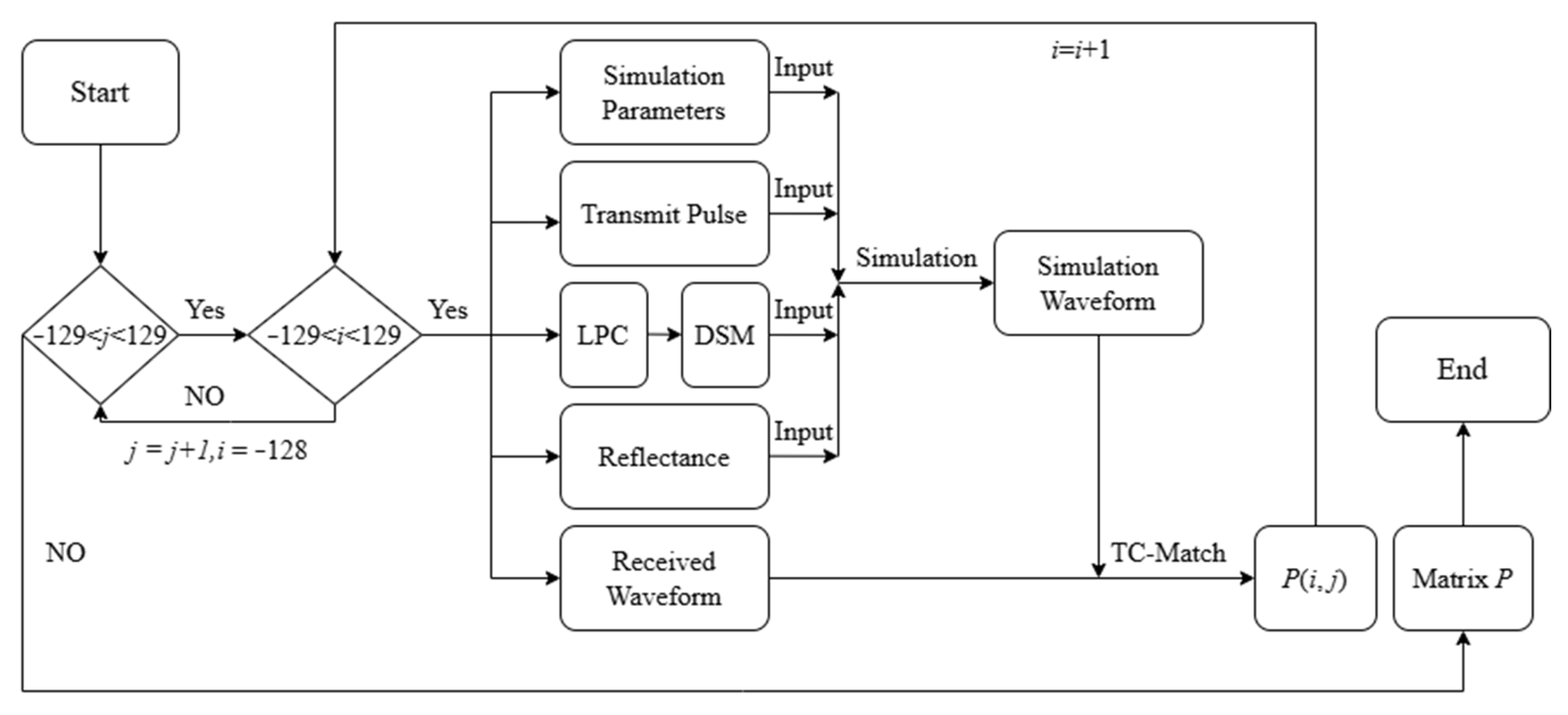
2.4. Procedure for Laser Footprint Geolocation
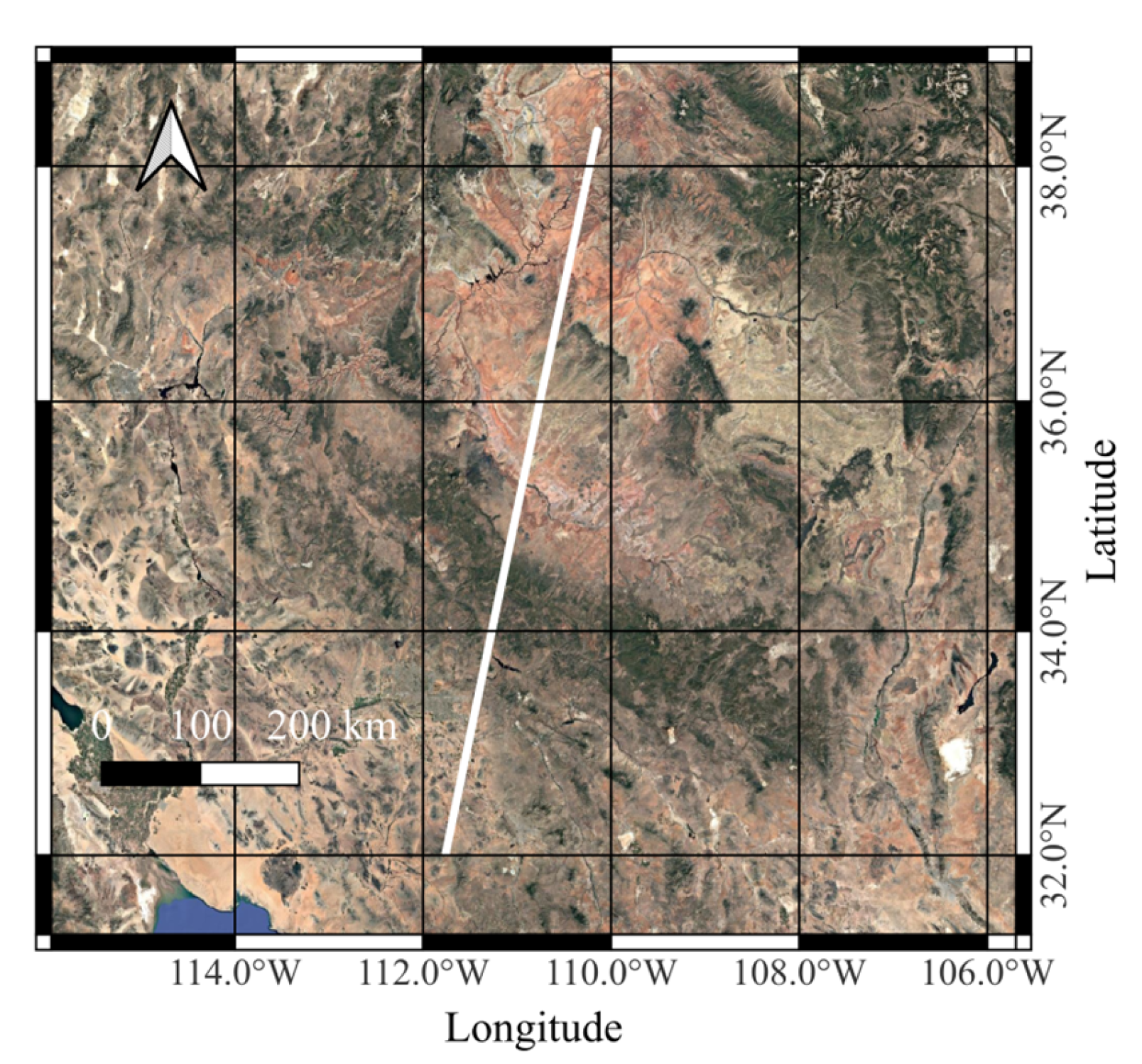
2.5. A Description of the Study Area
3. Results
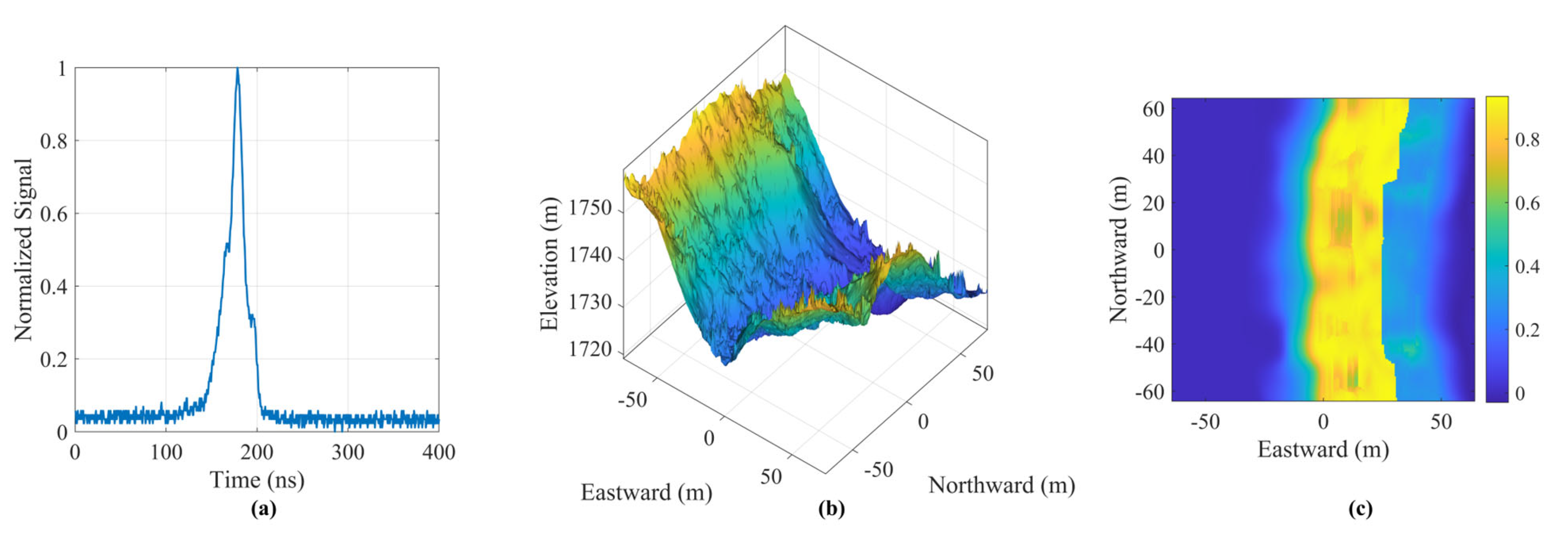
3.1. Single-Footprint Analysis
3.2. Multi-Footprint Joint Estimation
3.2.1. Comparison of Geolocation Result Stability Based on TC-Match and PCC-Match
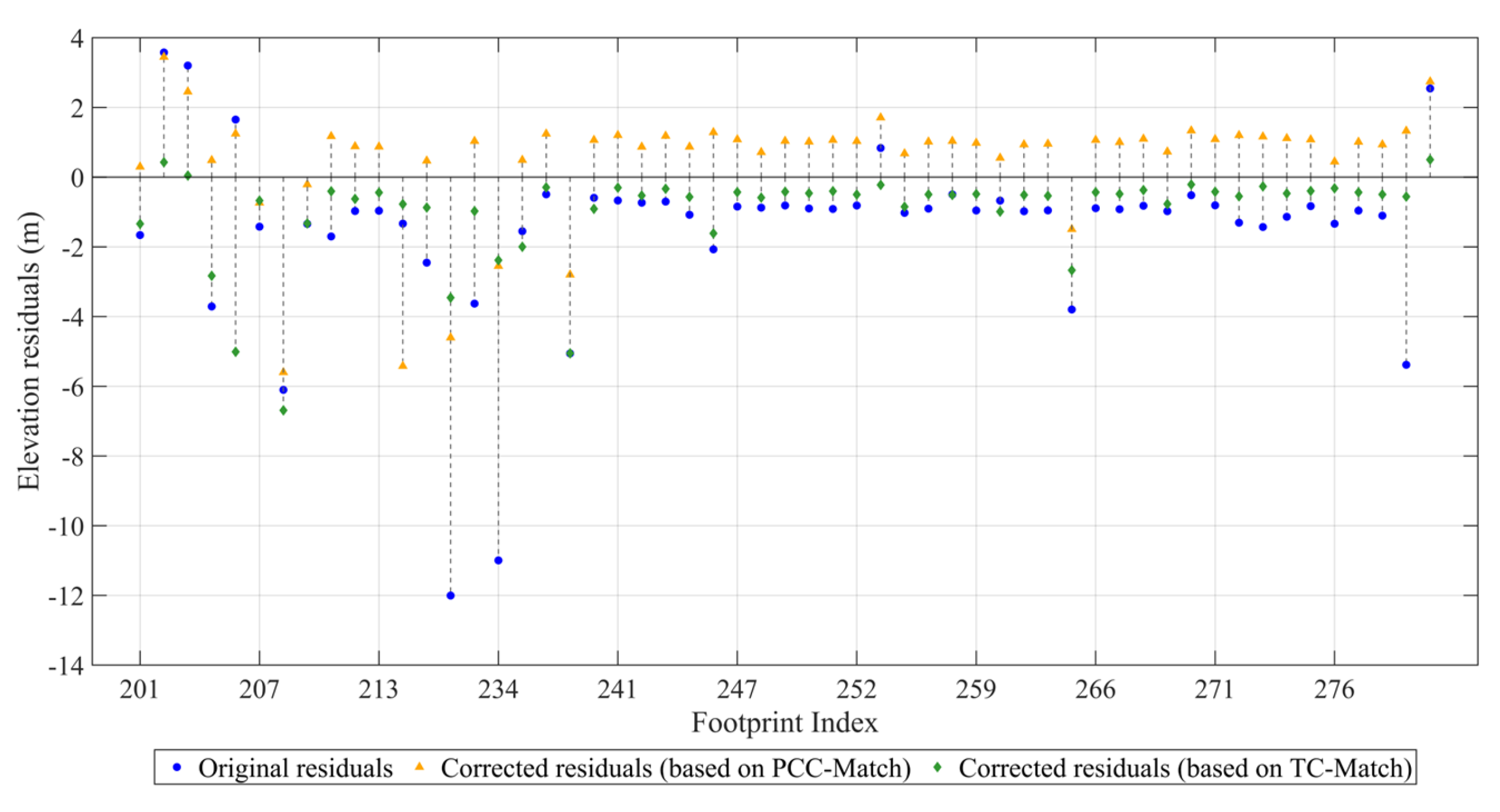
3.2.2. Evaluation of Elevation Corrections Based on TC-Match and PCC-Match
4. Discussion
- (1)
- Dependence on terrain data quality: Both TC-Match and PCC-Match rely on simulated waveforms generated from digital surface models (DSMs). Consequently, the accuracy and resolution of DSMs directly affect the reliability of waveform matching and geolocation performance. In regions with outdated or low-resolution terrain data, the effectiveness of both methods may be compromised.
- (2)
- Simplified simulation assumptions: The waveform simulation component in this study followed widely accepted modeling approaches from prior research, involving simplified modeling of atmospheric transmission processes for laser pulses without explicitly considering time-dependent atmospheric conditions or orbital perturbations. While this simplification met the simulation requirements of the current study, incorporating dynamic atmospheric models or refined orbit information in future research could further reduce residual geolocation uncertainty, especially in scenarios sensitive to temporal or environmental variability.
- (3)
- The use of coordinate correction as a substitute for geometric inversion: Due to the absence of complete attitude and orbit metadata in the current GF-7 data package, this study employed a simplified coordinate correction strategy rather than a rigorous geometric inversion. Although this approach effectively compensates for systematic biases in practice, it does not explicitly distinguish between different sources of error (e.g., pointing errors versus ranging errors), and its performance may vary depending on local terrain conditions and orbit geometry.
- (4)
- Computational efficiency considerations: TC-Match requires slightly more processing time than PCC-Match due to its use of a constrained sliding correlation window. Based on benchmark experiments conducted on a Windows 11 system equipped with a 13th-Gen Intel (R) Core (TM) i9-13900HX CPU (2.20 GHz) using MATLAB 2021b, the average processing times per footprint were approximately 34.17 s for TC-Match and 33.91 s for PCC-Match. While the difference of 0.26 s per footprint reflects the added complexity introduced by terrain constraints, the overall runtime remains acceptable for typical post-processing and calibration applications.
5. Conclusions
- Regarding geolocation stability, extensive random sampling experiments show that TC-Match exhibited faster convergence and reduced variability in geolocation outcomes across varying footprint sample sizes. When the number of footprints exceeded 40, the standard deviations of the geolocation offsets in both the east–west and north–south directions remained below 2 m. This performance notably surpassed PCC-Match, demonstrating enhanced stability and robustness.
- Regarding elevation residual correction, the experimental results indicate that TC-Match reduced the standard deviation of the elevation residuals for the region C footprints to 1.34 m, outperforming both PCC-Match (1.70 m) and the original data (2.58 m). Table 3, along with Figure 7 and Figure 8, further demonstrates that TC-Match surpassed traditional methods in terms of enhancing footprint elevation accuracy, reducing extreme errors, and correcting systematic biases. Consequently, it significantly improved the consistency and usability of the elevation products.
- Regarding residual distribution characteristics, the probability density fitting results indicate that the elevation residual distribution after TC-Match correction was closer to a standard normal distribution, exhibiting stronger symmetry and concentration. This indicates that TC-Match possesses an enhanced ability to suppress systematic biases and improve the consistency of geolocation outcomes.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PCC-Match | Pearson correlation coefficient matching |
| TC-Match | Terrain-constrained cross-correlation matching |
| GF-7 | GaoFen-7 |
| GEDI | Global Ecosystem Dynamics Investigation |
| TECM | Terrestrial Ecosystem Carbon Monitoring |
| PCC | Pearson correlation coefficient |
| DEM | Digital Elevation Model |
| GLAS | Geoscience Laser Altimeter System |
| DSM | Digital surface model |
| LPC | LiDAR point cloud |
| USGS | United States Geological Survey |
References
- Morshed, A.H. Laser Altimetry and Its Application in Geographic Scanning. In Proceedings of the Seventeenth National Radio Science Conference, Minufiya, Egypt, 22–24 February 2000; p. D4–1. [Google Scholar] [CrossRef]
- Xiao, H.; Stark, A.; Steinbrügge, G.; Hussmann, H.; Oberst, J. Processing of Laser Altimeter Time-of-Flight Measurements to Geodetic Coordinates. J. Geod. 2021, 95, 22. [Google Scholar] [CrossRef]
- Abshire, J.B.; Sun, X.; Riris, H.; Sirota, J.M.; McGarry, J.F.; Palm, S.; Yi, D.; Liiva, P. Geoscience Laser Altimeter System (GLAS) on the ICESat Mission: On-orbit Measurement Performance. Geophys. Res. Lett. 2005, 32, 2005GL024028. [Google Scholar] [CrossRef]
- Ewert, H.; Groh, A.; Dietrich, R. Volume and Mass Changes of the Greenland Ice Sheet Inferred from ICESat and GRACE. J. Geodyn. 2012, 59, 111–123. [Google Scholar] [CrossRef]
- Wang, C.; Tang, F.; Li, L.; Li, G.; Cheng, F.; Xi, X. Wavelet Analysis for ICESat/GLAS Waveform Decomposition and Its Application in Average Tree Height Estimation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 115–119. [Google Scholar] [CrossRef]
- Duncanson, L.; Neuenschwander, A.; Hancock, S.; Thomas, N.; Fatoyinbo, T.; Simard, M.; Silva, C.A.; Armston, J.; Luthcke, S.B.; Hofton, M.; et al. Biomass Estimation from Simulated GEDI, ICESat-2 and NISAR across Environmental Gradients in Sonoma County, California. Remote Sens. Environ. 2020, 242, 111779. [Google Scholar] [CrossRef]
- Harding, D.J.; Carabajal, C.C. ICESat Waveform Measurements of Within-footprint Topographic Relief and Vegetation Vertical Structure. Geophys. Res. Lett. 2005, 32, 2005GL023471. [Google Scholar] [CrossRef]
- Peng, K.; Xie, H.; Xu, Q.; Huang, P.; Liu, Z. A Physics-Assisted Convolutional Neural Network for Bathymetric Mapping Using ICESat-2 and Sentinel-2 Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4210513. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Liu, R.; Huang, G.; Zhao, C.; Zhen, Y.; Tang, H.; Dou, X. Overview of the GF-7 Laser Altimeter System Mission. Earth Space Sci. 2020, 7, e2019EA000777. [Google Scholar] [CrossRef]
- Xie, J.; Liu, R.; Tang, X.; Yang, X.; Zeng, J.; Mo, F.; Mei, Y. A Geometric Calibration Method without a Field Site of the GF-7 Satellite Laser Relying on a Surface Mathematical Model. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5700214. [Google Scholar] [CrossRef]
- Li, G.; Guo, J.; Tang, X.; Ye, F.; Zuo, Z.; Liu, Z.; Chen, J.; Xue, Y. Preliminary Quality Analysis of Gf-7 Satellite Laser Altimeter Full Waveform Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 129–134. [Google Scholar] [CrossRef]
- Li, S.; Zhang, G.; Fan, X. Rigorous Sensor Model of Gaofen-7 Satellite Laser Altimeter Based on Coupled Footprint Camera. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 1815–1826. [Google Scholar] [CrossRef]
- Gardner, C.S. Ranging Performance of Satellite Laser Altimeters. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1061–1072. [Google Scholar] [CrossRef]
- Zhao, P.; Li, S.; Ma, Y.; Liu, X.; Yang, J.; Yu, D. A New Terrain Matching Method for Estimating Laser Pointing and Ranging Systematic Biases for Spaceborne Photon-Counting Laser Altimeters. ISPRS J. Photogramm. Remote Sens. 2022, 188, 220–236. [Google Scholar] [CrossRef]
- Yi, H.; Li, S.; Ma, Y.; Huang, K.; Zhou, H.; Shi, G. On-Orbit Calibration of Satellite Laser Altimeters Based on Footprint Detection. Acta Phys. Sin. 2017, 66, 134206. [Google Scholar] [CrossRef]
- Huang, J.; Li, G.; Gao, X.; Wang, J.; Fan, W.; Zhou, S. Ranging Error Analysis of Single Photon Satellite Laser Altimetry under Different Terrain Conditions. Proc. SPIE Fourth Semin. Nov. Optoelectron. Detect. Technol. Appl. 2018, 10697, 340–350. [Google Scholar] [CrossRef]
- Wang, C.; Yang, X.; Xi, X.; Zhang, H.; Chen, S.; Peng, S.; Zhu, X. Evaluation of Footprint Horizontal Geolocation Accuracy of Spaceborne Full-Waveform LiDAR Based on Digital Surface Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2135–2144. [Google Scholar] [CrossRef]
- Li, X.; Li, L.; Ni, W.; Mu, X.; Wu, X.; Vaglio Laurin, G.; Vangi, E.; Stereńczak, K.; Chirici, G.; Yu, S.; et al. Validating GEDI Tree Canopy Cover Product across Forest Types Using Co-Registered Aerial LiDAR Data. ISPRS J. Photogramm. Remote Sens. 2024, 207, 326–337. [Google Scholar] [CrossRef]
- Li, G.; Gao, X.; Hu, F.; Guo, A.; Liu, Z.; Chen, J.; Liu, C.; Nie, S.; Fu, A. Overview of the terrestrial ecosystem carbon monitoring satellite laser altimeter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 53–58. [Google Scholar] [CrossRef]
- Li, B.; Xie, H.; Tong, X.; Zhang, Z.; Liu, S. Extracting Satellite Laser Altimetry Footprints with the Required Accuracy by Random Forest. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1347–1351. [Google Scholar] [CrossRef]
- Tang, H.; Stoker, J.; Luthcke, S.; Armston, J.; Lee, K.; Blair, B.; Hofton, M. Evaluating and Mitigating the Impact of Systematic Geolocation Error on Canopy Height Measurement Performance of GEDI. Remote Sens. Environ. 2023, 291, 113571. [Google Scholar] [CrossRef]
- Tang, X.; Xie, J.; Gao, X.; Mo, F.; Feng, W.; Liu, R. The In-Orbit Calibration Method Based on Terrain Matching with Pyramid-Search for the Spaceborne Laser Altimeter. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1053–1062. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Wang, Z.; Huang, G.; Shu, R. Classification of Laser Footprint Based on Random Forest in Mountainous Area Using GLAS Full-Waveform Features. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 2284–2297. [Google Scholar] [CrossRef]
- Zhang, W.; Li, S.; Zhang, Z.; Liu, R.; Ma, Y. Using waveform matching to precisely locate footprints of a satellite laser altimeter. Infrared Laser Eng. 2018, 47, 1117007. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, X.; Li, G.; Chen, J. Decomposition Techniques for Icesat/Glas Full-Waveform Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 1179–1182. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, H.; Han, Q.; Long, X.; Ma, Y.; Li, Q.; Zhao, P.; Li, S. A waveform matching-based method of improving laser footprint geolocation for GaoFen-7 spaceborne laser altimeter in mountainous areas. J. Infrared Millim. Waves 2022, 41, 1051–1061. [Google Scholar] [CrossRef]
- Blair, J.B.; Hofton, M.A. Modeling Laser Altimeter Return Waveforms over Complex Vegetation Using High-resolution Elevation Data. Geophys. Res. Lett. 1999, 26, 2509–2512. [Google Scholar] [CrossRef]
- Liu, R.; Xie, J. Calibration of the Laser Pointing Bias of the GaoFen-7 Satellite Based on Simulation Waveform Matching. Opt. Express 2021, 29, 21844. [Google Scholar] [CrossRef]
- Yang, X.; Wang, C.; Xi, X.; Wang, Y.; Zhang, Y.; Zhou, G. Footprint Size Design of Large-Footprint Full-Waveform LiDAR for Forest and Topography Applications: A Theoretical Study. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9745–9757. [Google Scholar] [CrossRef]
- Li, S.; Li, C.; Zhang, G.; Wang, Y. Geometric Calibration of Satellite Laser Altimeters Based on Waveform Matching. Photogramm. Rec. 2021, 36, 104–123. [Google Scholar] [CrossRef]
- Li, S.; Yu, Q.; Fu, A.; Zhang, G. A Calibration Method for Large-Footprint Full-Waveform Airborne Laser Altimeter without a Calibration Field. Remote Sens. 2023, 15, 2789. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Y.; Yin, T.; Wang, C.; Lauret, N.; Regaieg, O.; Xi, X.; Gastellu-Etchegorry, J.P. Comprehensive LiDAR Simulation with Efficient Physically-Based DART-Lux Model (I): Theory, Novelty, and Consistency Validation. Remote Sens. Environ. 2022, 272, 112952. [Google Scholar] [CrossRef]
- Xu, Y.; Ding, S.; Chen, P.; Tang, H.; Ren, H.; Huang, H. Horizontal Geolocation Error Evaluation and Correction on Full-Waveform LiDAR Footprints via Waveform Matching. Remote Sens. 2023, 15, 776. [Google Scholar] [CrossRef]
- Xu, Q.; Xie, H.; Huang, P.; Ji, M.; Wu, H.; Liu, C.; Liu, S.; Tong, X.; Jin, Y.; Sun, Y.; et al. An On-Orbit Calibration Model for Full-Waveform Laser Altimeters by Matching Single-Modal and Multi-Modal Waveforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 8706–8728. [Google Scholar] [CrossRef]
- Li, G.; Tang, X.; Zhou, X.; Lu, G.; Chen, J.; Huang, G.; Gao, X.; Liu, Z.; Ou-Yang, S. The method of GF-7 satellite laser altimeter on-orbit geometric calibration without field site. Acta Geod. Cartogr. Sin. 2022, 51, 401–412. [Google Scholar] [CrossRef]
- Xu, C.; Xie, J.; Yang, X.; Lv, X. Positioning Improvement for Spaceborne Laser Footprint Based on Precisely Terrain Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2024, 48, 753–759. [Google Scholar] [CrossRef]
- Zhang, H.; Xu, Q.; Huang, P.; Chen, G.; Xie, H. High-precision terrain-based on-orbit geometric calibration method for laser altimeter. Bull Surv. Map. 2024, 7, 41–47. Available online: http://tb.chinasmp.com/CN/10.13474/j.cnki.11-2246.2024.0708 (accessed on 8 July 2025).
- Luthcke, S.B.; Thomas, T.C.; Pennington, T.A.; Rebold, T.W.; Nicholas, J.B.; Rowlands, D.D.; Gardner, A.S.; Bae, S. ICESat-2 Pointing Calibration and Geolocation Performance. Earth Space Sci. 2021, 8, e2020EA001494. [Google Scholar] [CrossRef]
- Zhou, S.; Zhao, P.; Han, Q.; Luan, C.; Yang, J.; Wang, H.; Ma, Y.; Zhou, H.; Li, S. Waveform frequency domain matching-based positioning method for satellite-borne LIDAR footprints. J. Infrared Millim. Waves 2025, 44, 412–423. [Google Scholar] [CrossRef]
- Li, G.; Tang, X.; Zhang, C.; Gao, X.; Chen, J. Multi-criteria constraint algorithm for selecting ICESat/GLAS data as elevation control points. J. Remote Sens. 2017, 21, 96–104. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Orbital altitude | 505.984 km |
| Wavelength | 1064 nm |
| Pulse width of emitted waveform | 4~8 ns |
| Laser beam divergence angle | |
| Telescope aperture | 600 mm |
| Sampling frequency | 2 GHz |
| Group | Footprint Index | Number of Footprints | Region |
|---|---|---|---|
| A | 1–62 | 41 | Utah |
| B | 63–200 | 29 | Northern Arizona |
| C | 201–300 | 55 | Southern Arizona |
| (m) | Original | Corrected by PCC-Match | Corrected by TC-Match |
|---|---|---|---|
| 0 | 3.64 | 9.09 | |
| 7.27 | 12.73 | 63.64 | |
| 32.73 | 27.27 | 75.55 | |
| 58.18 | 69.09 | 80.00 | |
| 69.09 | 83.64 | 83.64 | |
| 76.36 | 85.45 | 85.45 | |
| 78.18 | 85.45 | 87.27 | |
| 78.18 | 85.45 | 89.09 | |
| 21.82 | 14.55 | 10.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Zhao, P.; Yang, J.; Han, Q.; Ma, Y.; Zhou, H.; Li, S. A Terrain-Constrained Cross-Correlation Matching Method for Laser Footprint Geolocation. Remote Sens. 2025, 17, 2381. https://doi.org/10.3390/rs17142381
Zhou S, Zhao P, Yang J, Han Q, Ma Y, Zhou H, Li S. A Terrain-Constrained Cross-Correlation Matching Method for Laser Footprint Geolocation. Remote Sensing. 2025; 17(14):2381. https://doi.org/10.3390/rs17142381
Chicago/Turabian StyleZhou, Sihan, Pufan Zhao, Jian Yang, Qijin Han, Yue Ma, Hui Zhou, and Song Li. 2025. "A Terrain-Constrained Cross-Correlation Matching Method for Laser Footprint Geolocation" Remote Sensing 17, no. 14: 2381. https://doi.org/10.3390/rs17142381
APA StyleZhou, S., Zhao, P., Yang, J., Han, Q., Ma, Y., Zhou, H., & Li, S. (2025). A Terrain-Constrained Cross-Correlation Matching Method for Laser Footprint Geolocation. Remote Sensing, 17(14), 2381. https://doi.org/10.3390/rs17142381