
An Improved Size and Direction Adaptive Filtering Method for Bathymetry Using ATLAS ATL03 Data


Abstract
1. Introduction
2. Materials and Methods
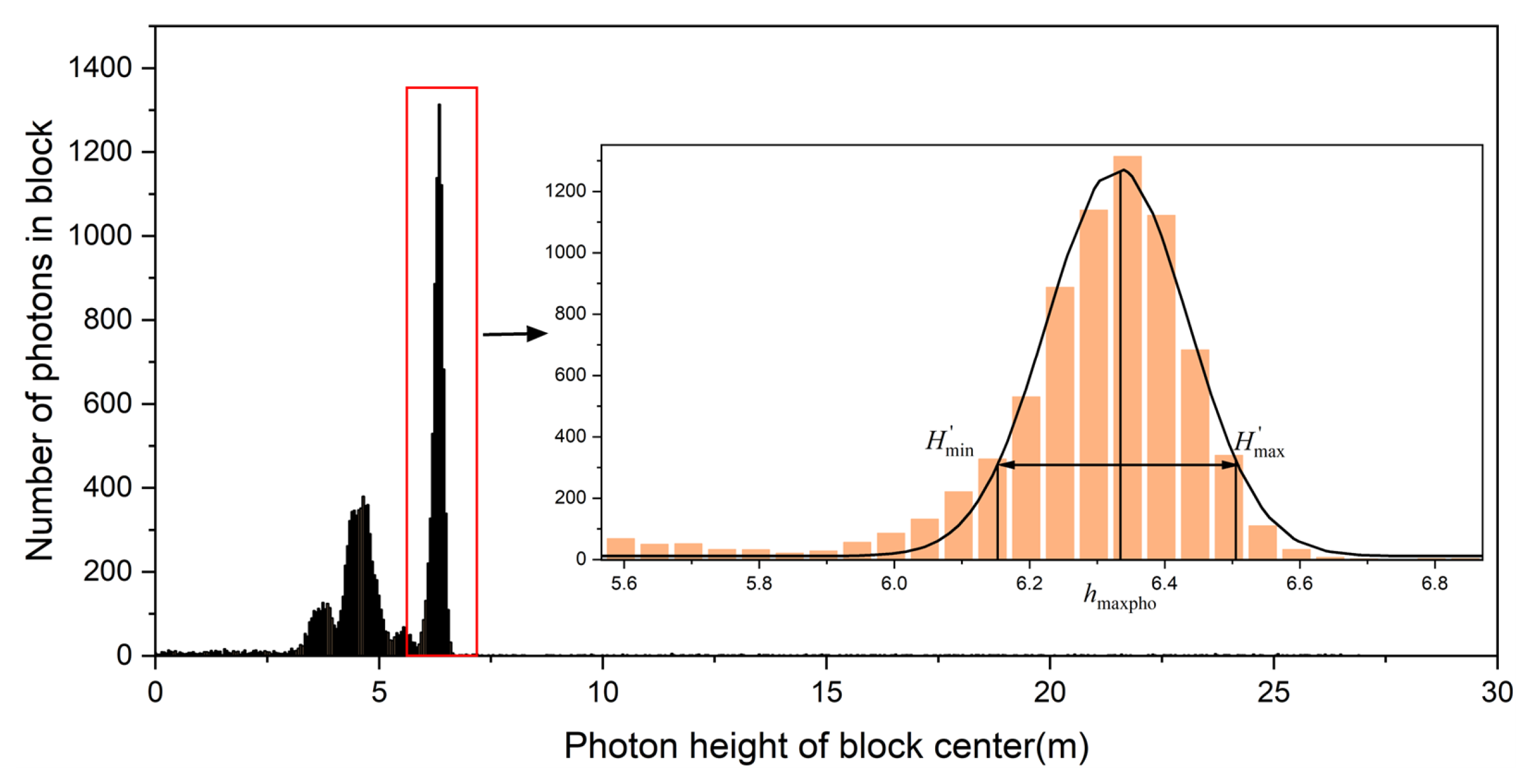
2.1. Extracting Bathymetry Signals
2.2. Refraction Correction for Seafloor Photons
3. Study Area and Dataset
3.1. Study Area
3.2. ATLAS ATL03 Dataset
3.3. Reference Data
4. Experimental Results
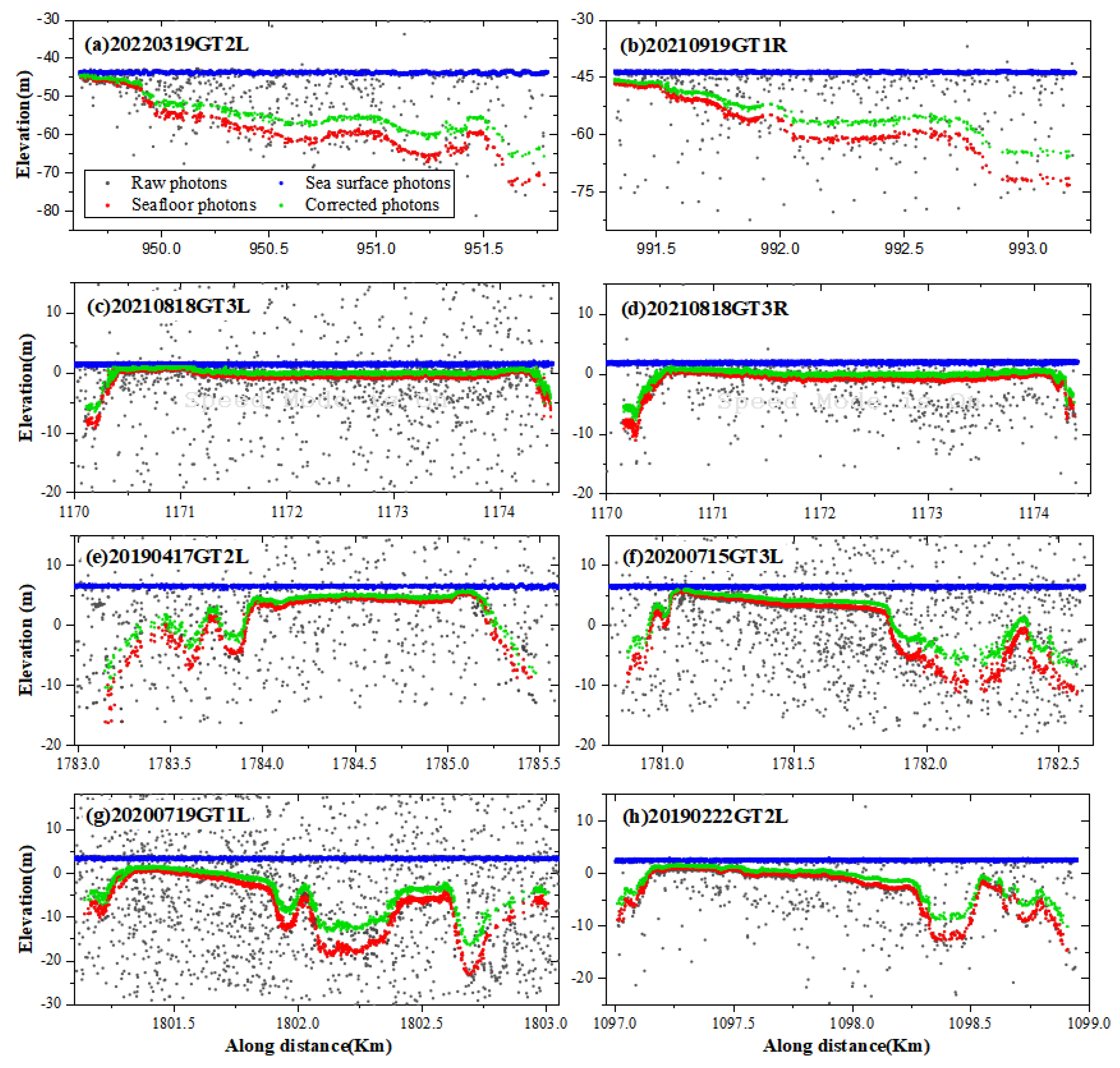
4.1. Signal Photon Detection Results
4.2. Refraction Correction Results
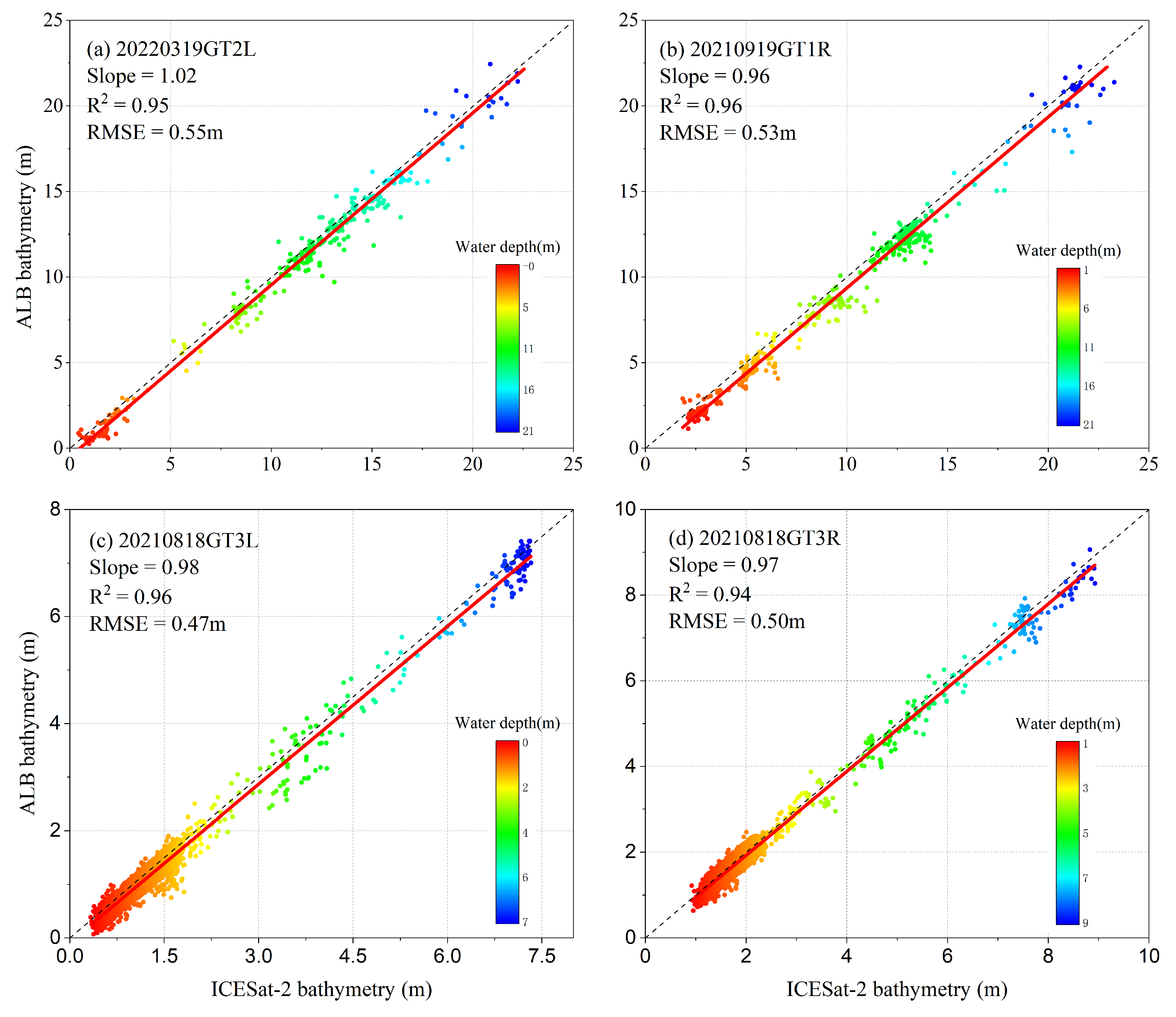
4.3. Bathymetric Accuracy and Validation
5. Analysis and Discussion
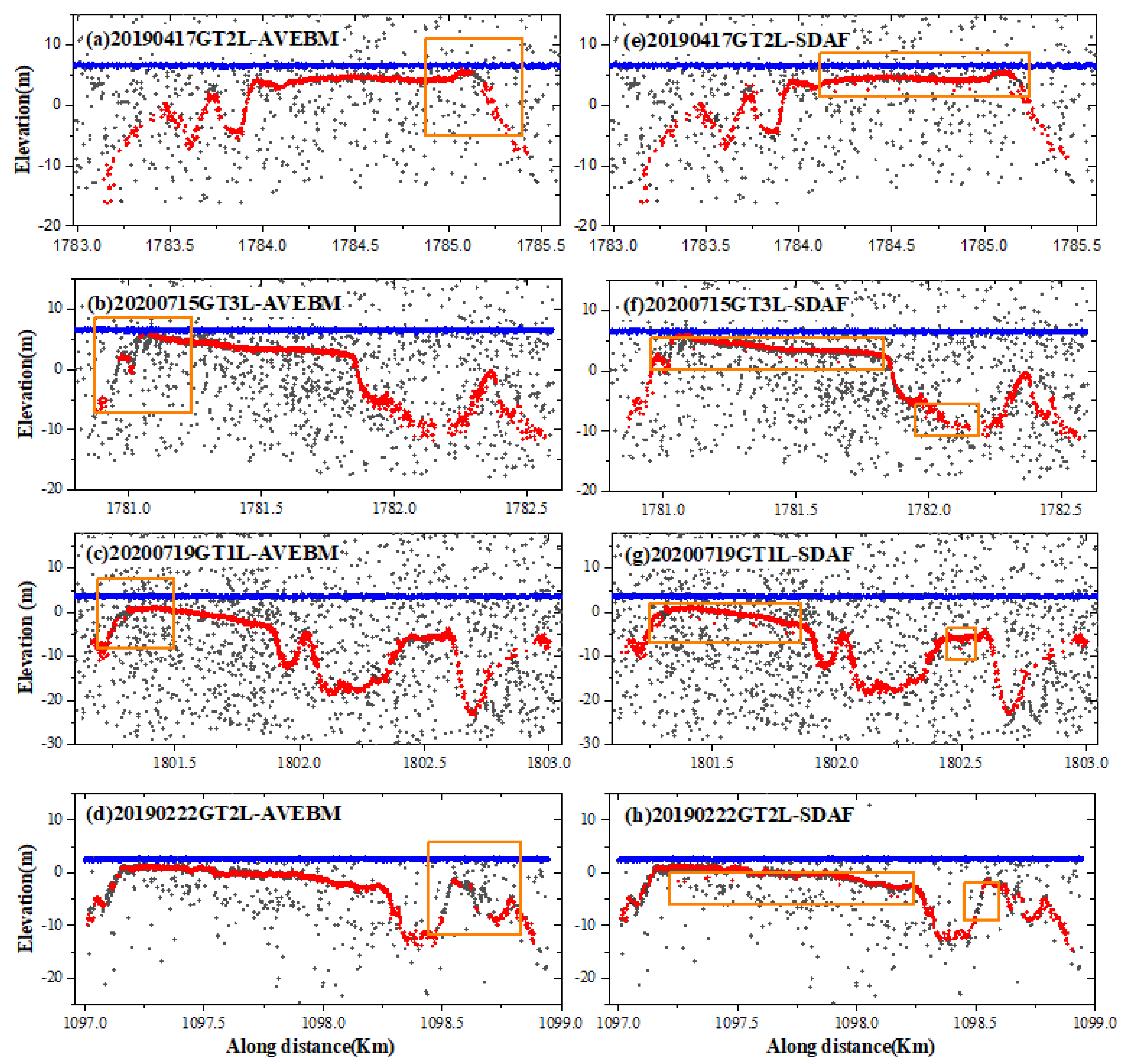
5.1. Detection Capability of Our Method
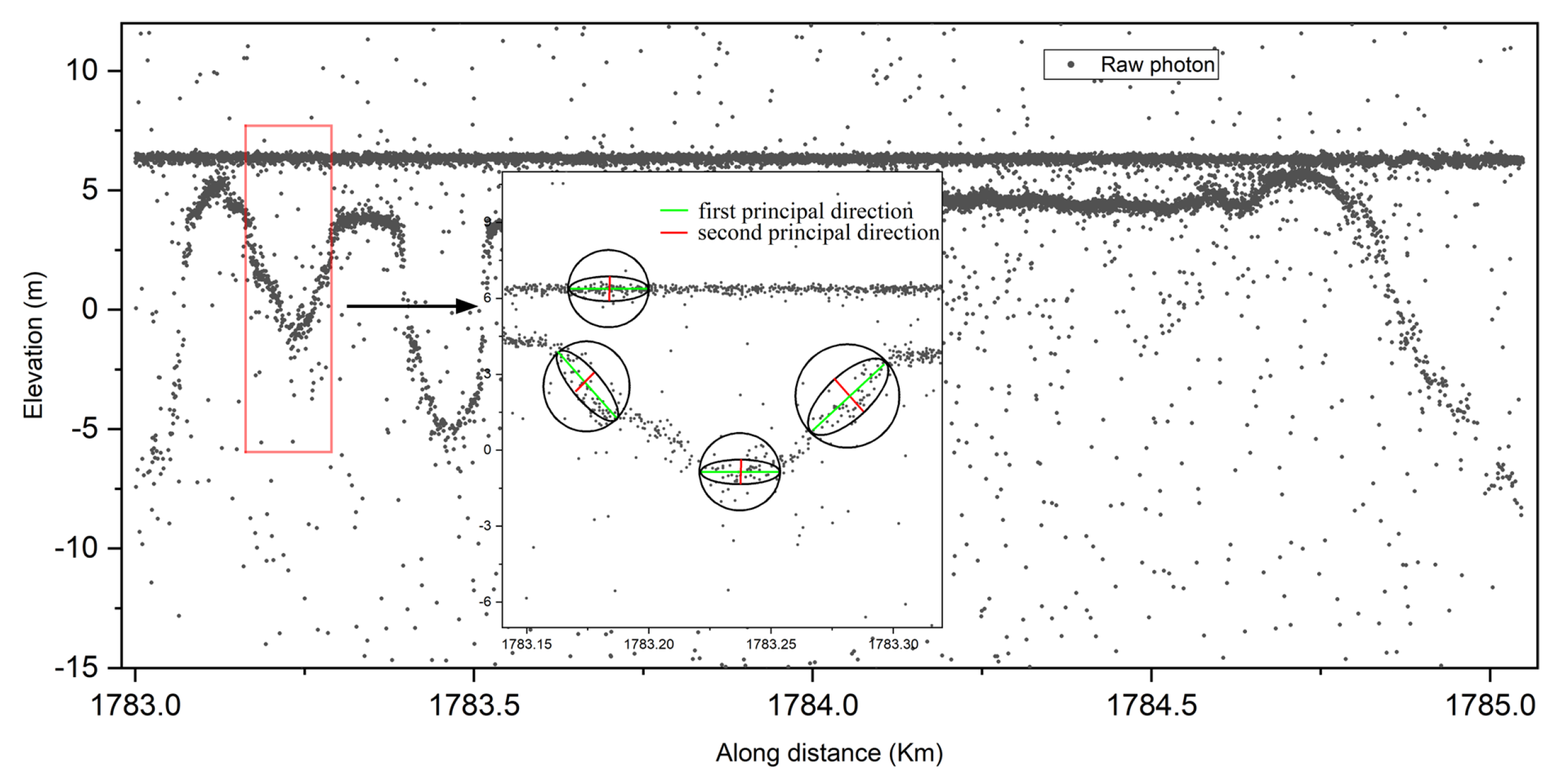
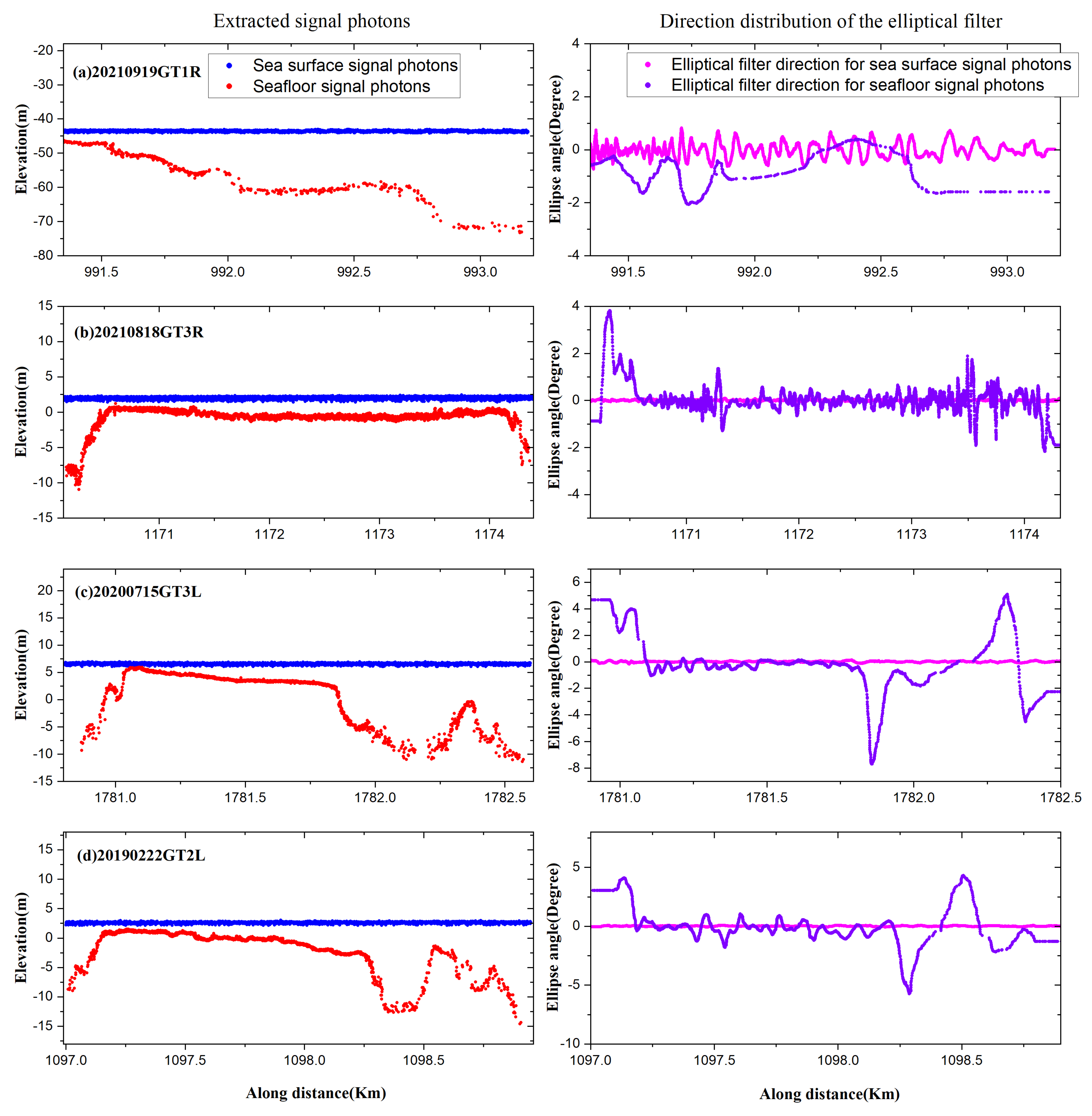
5.2. Directional Adaptability of Ellipses in ISDAF
5.3. Assessment of ATLAS Bathymetry
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ATLAS | Advanced Topographic Laser Altimeter System |
| ICESat-2 | Ice, Cloud, and Land Elevation Satellite-2 |
| ISDAF | improved size and direction adaptive filtering |
| ALB | Airborne LiDAR bathymetry |
| RMSE | root mean square error |
| DBSCAN | Density-based spatial clustering of applications with noise |
| OPTICS | Ordering points to identify the clustering structure |
| AVEBM | adaptive variable ellipse filtering bathymetric method |
| SDAF | size and direction adaptive filtering |
| PCA | principal component analysis |
References
- Fu, T.; Zhang, L.; Yuan, X.; Chen, B.; Yan, M. Spatio-temporal patterns and sustainable development of coastal aquaculture in Hainan Island, China: 30 Years of evidence from remote sensing. Ocean Coast. Manag. 2021, 214, 105897. [Google Scholar] [CrossRef]
- Putra, A.; Dewata, I.; Hermon, D.; Barlian, E.; Umar, G. Sustainable development-based coastal management policy development: A literature review. J. Sustain. Sci. Manag. 2023, 18, 238–246. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R.; Rolland, A.; Binet, R.; Brodie, K.L.; Bak, A.S. Coastal morphology from space: A showcase of monitoring the topography-bathymetry continuum. Remote Sens. Environ. 2021, 261, 112469. [Google Scholar] [CrossRef]
- Patel, K.; Jain, R.; Kalubarme, M.H.; Bhatt, T. Coastal erosion monitoring using multi-temporal remote sensing and sea surface temperature data in coastal districts of Gujarat state, India. Geol. Ecol. Landscapes 2024, 8, 194–207. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, Y.; Yang, X. Bathymetry derivation and slope-assisted benthic mapping using optical satellite imagery in combination with ICESat-2. Int. J. Appl. Earth Obs. Geoinf. 2024, 127, 103700. [Google Scholar] [CrossRef]
- Morlighem, M.; Williams, C.N.; Rignot, E.; An, L.; Arndt, J.E.; Bamber, J.L.; Catania, G.; Chauché, N.; Dowdeswell, J.A.; Dorschel, B.; et al. BedMachine v3: Complete bed topography and ocean bathymetry mapping of Greenland from multibeam echo sounding combined with mass conservation. Geophys. Res. Lett. 2017, 44, 11–51. [Google Scholar] [CrossRef]
- Wang, X.; Yang, F.; Zhang, H.; Su, D.; Wang, Z.; Xu, F. Registration of airborne LiDAR bathymetry and multibeam echo sounder point clouds. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Yang, A.; Wu, Z.; Yang, F.; Su, D.; Ma, Y.; Zhao, D.; Qi, C. Filtering of airborne LiDAR bathymetry based on bidirectional cloth simulation. ISPRS J. Photogramm. Remote Sens. 2020, 163, 49–61. [Google Scholar] [CrossRef]
- Guo, Y.; Feng, C.; Xu, W.; Liu, Y.; Su, D.; Qi, C.; Dong, Z. Water-land classification for single-wavelength airborne LiDAR bathymetry based on waveform feature statistics and point cloud neighborhood analysis. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103268. [Google Scholar] [CrossRef]
- Degnan, J.J. Photon-counting multikilohertz microlaser altimeters for airborne and spaceborne topographic measurements. J. Geodyn. 2002, 34, 503–549. [Google Scholar] [CrossRef]
- Yang, J.; Ma, Y.; Zheng, H.; Gu, Y.; Zhou, H.; Li, S. Analysis and Correction of Water Forward-Scattering-Induced Bathymetric Bias for Spaceborne Photon-Counting Lidar. Remote Sens. 2023, 15, 931. [Google Scholar] [CrossRef]
- Zuo, L.; Wang, X.; Sun, Q.; Shi, J.; Zhang, Y. A Two-Stage Nearshore Seafloor ICESat-2 Photon Data Filtering Method Considering the Spatial Relationship. Remote Sens. 2024, 16, 4795. [Google Scholar] [CrossRef]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS bathymetry and analysis of ATLAS’s bathymetric mapping performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, Y.; Le, Y.; Dong, Y.; Dai, G.; Wang, L. Refraction and coordinate correction with the JONSWAP model for ICESat-2 bathymetry. ISPRS J. Photogramm. Remote Sens. 2022, 186, 285–300. [Google Scholar] [CrossRef]
- Ranndal, H.; Sigaard Christiansen, P.; Kliving, P.; Baltazar Andersen, O.; Nielsen, K. Evaluation of a statistical approach for extracting shallow water bathymetry signals from ICESat-2 ATL03 photon data. Remote Sens. 2021, 13, 3548. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J. An adaptive density-based model for extracting surface returns from photon-counting laser altimeter data. IEEE Geosci. Remote Sens. Lett. 2014, 12, 726–730. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, X.; Zhang, Y.; Chen, F.; Dang, S.; Sun, T. A Density-Based Multilevel Terrain-Adaptive Noise Removal Method for ICESat-2 Photon-Counting Data. Sensors 2023, 23, 9742. [Google Scholar] [CrossRef]
- Wang, Z.; Nie, S.; Wang, C.; Fu, B.; Xi, X.; Yang, B. A novel bathymetric signal extraction method for photon-counting LiDAR data based on adaptive rotating ellipse and curve iterative fitting. Int. J. Appl. Earth Obs. Geoinf. 2024, 132, 104042. [Google Scholar] [CrossRef]
- Kumar, P.; Lewis, P.; McCarthy, T. The potential of active contour models in extracting road edges from mobile laser scanning data. Infrastructures 2017, 2, 9. [Google Scholar] [CrossRef]
- Xie, H.; Xu, Q.; Luan, K.; Sun, Y.; Liu, X.; Guo, Y.; Li, B.; Jin, Y.; Liu, S.; Tong, X. Evaluating ICESat-2 Seafloor Photons by Underwater Light-Beam Propagation and Noise Modeling. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Herzfeld, U.C.; McDonald, B.; Wallin, B.F.; Krabill, W.; Manizade, S.; Sonntag, J.; Mayer, H.; Yearsley, W.A.; Chen, P.A.; Weltman, A. Elevation changes and dynamic provinces of Jakobshavn Isbræ, Greenland, derived using generalized spatial surface roughness from ICESat GLAS and ATM data. J. Glaciol. 2014, 60, 834–848. [Google Scholar] [CrossRef]
- Hsu, H.J.; Huang, C.Y.; Jasinski, M.; Li, Y.; Gao, H.; Yamanokuchi, T.; Wang, C.G.; Chang, T.M.; Ren, H.; Kuo, C.Y.; et al. A semi-empirical scheme for bathymetric mapping in shallow water by ICESat-2 and Sentinel-2: A case study in the South China Sea. ISPRS J. Photogramm. Remote Sens. 2021, 178, 1–19. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Y.; Zhang, J.; Zhang, H.; Zhu, H.; Leng, Z.; Zhang, X.; Cui, A. A noise removal algorithm based on adaptive elevation difference thresholding for ICESat-2 photon-counting data. Int. J. Appl. Earth Obs. Geoinf. 2023, 117, 103207. [Google Scholar] [CrossRef]
- Chen, Y.; Le, Y.; Zhang, D.; Wang, Y.; Qiu, Z.; Wang, L. A photon-counting LiDAR bathymetric method based on adaptive variable ellipse filtering. Remote Sens. Environ. 2021, 256, 112326. [Google Scholar] [CrossRef]
- Cao, B.; Wang, J.; Hu, Y.; Lv, Y.; Yang, X.; Gong, H.; Li, G.; Lu, X. ICESAT-2 Shallow Bathymetric Mapping Based on a Size and Direction Adaptive Filtering Algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 6279–6295. [Google Scholar] [CrossRef]
- Xie, T.; Kong, R.; Nurunnabi, A.; Bai, S.; Zhang, X. Machine-Learning-Method-Based Inversion of Shallow Bathymetric Maps Using ICESat-2 ATL03 Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 3697–3714. [Google Scholar] [CrossRef]
- Zhong, J.; Liu, X.; Shen, X.; Jiang, L. A Robust Algorithm for Photon Denoising and Bathymetric Estimation Based on ICESat-2 Data. Remote Sens. 2023, 15, 2051. [Google Scholar] [CrossRef]
- Li, J.; Dong, Z.; Chen, L.; Tang, Q.; Hao, J.; Zhang, Y. Multi-Temporal Image Fusion-Based Shallow-Water Bathymetry Inversion Method Using Active and Passive Satellite Remote Sensing Data. Remote Sens. 2025, 17, 265. [Google Scholar] [CrossRef]
- Dietrich, J.T.; Reese, A.R.; Gibbons, A.; Magruder, L.; Parrish, C.E. Analysis of ICESat-2 Data Acquisition Algorithm Parameter Enhancements to Improve Worldwide Bathymetric Coverage. Earth Space Sci. 2024, 11, e2023EA003270. [Google Scholar] [CrossRef]
- Tan, Y.; Zhou, G.; Zhou, X.; Wei, J.; Chen, J.; Hu, H. Overview of Chinese and American marine airborne LiDAR. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 42, 111–115. [Google Scholar] [CrossRef]
- Stammer, D.; Ray, R.D.; Andersen, O.B.; Arbic, B.K.; Bosch, W.; Carrere, L.; Cheng, Y.; Chinn, D.S.; Dushaw, B.D.; Egbert, G.D.; et al. Accuracy assessment of global barotropic ocean tide models. Rev. Geophys. 2014, 52, 243–282. [Google Scholar] [CrossRef]
- Zheng, X.; Hou, C.; Huang, M.; Ma, D.; Li, M. A density and distance-based method for ICESat-2 photon-counting data denoising. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Fan, R.; Wang, L.; Xu, Z.; Niu, H.; Chen, J.; Zhou, Z.; Li, W.; Wang, H.; Sun, Y.; Feng, R. The first urban open space product of global 169 megacities using remote sensing and geospatial data. Sci. Data 2025, 12, 586. [Google Scholar] [CrossRef]
- Niu, H.; Fan, R.; Chen, J.; Xu, Z.; Feng, R. Urban informal settlements interpretation via a novel multi-modal Kolmogorov-Arnold fusion network by exploring hierarchical features from remote sensing and street view images. Sci. Remote Sens. 2025, 11, 100208. [Google Scholar] [CrossRef]
- Fan, R.; Niu, H.; Xu, Z.; Chen, J.; Feng, R.; Wang, L. Refined Urban Informal Settlements’ Mapping at Agglomeration Scale with the Guidance of Background Knowledge From Easy-Accessed Crowdsourced Geospatial Data. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–16. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, Z.; Le, Y.; Qiu, Z.; Chen, G.; Wang, L. Refraction correction and coordinate displacement compensation in nearshore bathymetry using ICESat-2 lidar data and remote-sensing images. Opt. Express 2021, 29, 2411–2430. [Google Scholar] [CrossRef]
- Xie, C.; Chen, P.; Pan, D.; Zhong, C.; Zhang, Z. Improved Filtering of ICESat-2 Lidar Data for Nearshore Bathymetry Estimation Using Sentinel-2 Imagery. Remote Sens. 2021, 13, 4303. [Google Scholar] [CrossRef]
- Chen, C.W.; Tang, J.L.; Chung, K.H.; Wei, T.H.; Huang, T.H. Negative nonlinear refraction obtained with ultrashort laser pulses. Opt. Express 2007, 15, 7006–7018. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Island(s) in Transit | ATLAS Dataset | Time (UTC) | Track ID | Beam | Geodetic Coordinates (Longitude, Latitude) |
|---|---|---|---|---|---|
| Vieques Island | 20220319 20210919 | 21:05 04:51 | 1337 | GT2L GT1R | 18°4′26″N, 66°30′4″W–18°5′38″N, 66°30′11″W 18°4′31″N, 66°31′42″W–18°5′31″N, 66°31′49″W |
| Lingyang Reef | 20210818 20210818 | 18:30 18:30 | 857 | GT3L GT3R | 16°29′33″N, 111°34′42″E–16°27′1″N, 111°34′27″E 16°29′28″N, 111°34′40″E–16°27′0″N, 111°34′25″E |
| Langhua Reef | 20190417 20200715 | 23:07 01:26 | 301 | GT2L GT3L | 16°2′11″N, 112°27′22″E–16°3′18″N, 112°27′15″E 16°1′14″N, 112°31′4″E–16°2′12″N, 112°30′58″E |
| Huaguang Reef | 20200719 | 01:19 | 362 | GT1L | 16°11′45″N, 111°39′40″E–16°12′39″N, 111°39′35″E |
| 20190222 | 13:51 | 857 | GT2L | 16°14′7″N, 111°36′57″E–16°13′2″N, 111°36′51″E |
| ATLAS ATL03 Dataset | Depth Before Correction (m) | Depth After Correction (m) | Difference (m) | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Min | Max | |
| 20220319GT2L | 0.75 | 29.30 | 0.57 | 21.86 | 0.18 | 7.44 |
| 20210919GT1R | 2.84 | 29.13 | 2.12 | 21.79 | 0.72 | 7.34 |
| 20210818GT3L | 0.46 | 9.78 | 0.34 | 7.33 | 0.12 | 2.45 |
| 20210818GT3R | 1.24 | 11.83 | 0.91 | 8.84 | 0.33 | 2.99 |
| 20190417GT2L | 0.24 | 14.77 | 0.15 | 11.01 | 0.09 | 3.76 |
| 20200715GT3L | 0.69 | 17.34 | 0.49 | 12.95 | 0.20 | 4.39 |
| 20200719GT1L | 0.64 | 18.78 | 0.45 | 14.02 | 0.19 | 4.76 |
| 20190222GT2L | 0.97 | 15.85 | 0.71 | 11.81 | 0.26 | 4.04 |
| ATLAS ATL03 Dataset | Before Refraction Correction | After Refraction Correction | ||||
|---|---|---|---|---|---|---|
| Slope | R2 | RMSE (m) | Slope | R2 | RMSE (m) | |
| 20220319GT2L | 1.27 | 0.92 | 1.33 | 1.02 | 0.95 | 0.55 |
| 20210919GT1R | 1.24 | 0.93 | 1.19 | 0.96 | 0.96 | 0.53 |
| 20210818GT3L | 1.23 | 0.95 | 1.15 | 0.98 | 0.96 | 0.47 |
| 20210818GT3R | 1.24 | 0.93 | 1.18 | 0.97 | 0.94 | 0.50 |
| Overall | 1.36 | 0.94 | 1.20 | 1.07 | 0.95 | 0.53 |
| ATLAS ATL03 Dataset | Total Number of Photons | Number and Proportion of Sea Surface Photons | Number and Proportion of Seafloor Photons | Number and Proportion of Noise Photons |
|---|---|---|---|---|
| 20220319GT2L | 4686 | 3296 (70.34%) | 519 (11.08%) | 871 (18.58%) |
| 20210919GT1R | 10,704 | 9732 (90.92%) | 548 (5.12%) | 424 (3.96%) |
| 20210818GT3L | 26,400 | 12,602 (47.73%) | 10,040 (38.03%) | 3758 (14.24%) |
| 20210818GT3R | 21,675 | 10,477 (48.34%) | 9421 (43.46%) | 1777 (8.20%) |
| 20190417GT2L | 16,657 | 7141 (42.87%) | 7023 (42.16%) | 2493 (14.97%) |
| 20200715GT3L | 9569 | 4999 (52.24%) | 2502 (26.15%) | 2068 (21.61%) |
| 20200719GT1L | 5159 | 1960 (37.99%) | 1462 (28.34%) | 1737 (33.67%) |
| 20190222GT2L | 7465 | 3827 (51.27%) | 2635 (35.29%) | 1003 (13.44%) |
| ATLAS ATL03 Dataset | Total Number of Photons | Number and Proportion of Sea Surface Photons | Number and Proportion of Seafloor Photons | Number and Proportion of Noise Photons |
|---|---|---|---|---|
| 20190417GT2L | 16,657 | 7090 (42.56%) | 6901 (41.43%) | 2666 (16.01%) |
| 20200715GT3L | 9569 | 4932 (51.54%) | 2419 (25.28%) | 2218 (23.18%) |
| 20200719GT1L | 5159 | 1888 (36.60%) | 1406 (27.25%) | 1865 (36.15%) |
| 20190222GT2L | 7465 | 3744 (50.15%) | 2553 (34.20%) | 1168 (15.65%) |
| ATLAS ATL03 Dataset | Total Number of Photons | Number and Proportion of Sea Surface Photons | Number and Proportion of Seafloor Photons | Number and Proportion of Noise Photons |
|---|---|---|---|---|
| 20190417GT2L | 16,657 | 7180 (43.11%) | 7044 (42.29%) | 2433 (14.60%) |
| 20200715GT3L | 9569 | 5028 (52.54%) | 2537 (26.51%) | 2004 (20.95%) |
| 20200719GT1L | 5159 | 1978 (38.34%) | 1487 (28.82%) | 1694 (32.84%) |
| 20190222GT2L | 7465 | 3844 (51.49%) | 2628 (35.20%) | 993 (13.31%) |
| ATLAS ATL03 Dataset | Angle of the Ellipse Centered on the Water Surface Photon (Degree) | Angle of the Ellipse Centered on the Seafloor Photon (Degree) | ||||
|---|---|---|---|---|---|---|
| Minimum | Maximum | Difference | Minimum | Maximum | Difference | |
| 20210919GT1R | −0.62 | 0.58 | 1.20 | −2.07 | 0.39 | 2.46 |
| 20210818GT3R | −0.10 | 0.09 | 0.19 | −2.17 | 3.82 | 5.98 |
| 20200715GT3L | −0.19 | 0.23 | 0.41 | −7.68 | 5.08 | 12.76 |
| 20190222GT2L | −0.08 | 0.08 | 0.16 | −5.74 | 4.31 | 10.05 |
| ATLAS ATL03 Dataset | AVEBM | SDAF | ISDAF | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Slope | R2 | RMSE (m) | Slope | R2 | RMSE (m) | Slope | R2 | RMSE (m) | |
| 20220319GT2L | 1.11 | 0.92 | 0.60 | 1.07 | 0.93 | 0.57 | 1.02 | 0.95 | 0.55 |
| 20210919GT1R | 0.93 | 0.94 | 0.56 | 0.95 | 0.94 | 0.54 | 0.96 | 0.96 | 0.53 |
| 20210818GT3L | 0.95 | 0.93 | 0.51 | 0.97 | 0.96 | 0.49 | 0.98 | 0.96 | 0.47 |
| 20210818GT3R | 0.93 | 0.90 | 0.53 | 0.95 | 0.92 | 0.52 | 0.97 | 0.94 | 0.50 |
| Overall | 1.15 | 0.92 | 0.57 | 1.11 | 0.94 | 0.55 | 1.07 | 0.95 | 0.53 |
| ATLAS ATL03 Dataset | RMSE (m) | ||||
|---|---|---|---|---|---|
| [0, 2] | [2, 4] | [4, 6] | [6, 8] | [>8] | |
| 20220319GT2L | 0.28 | 0.38 | 0.54 | 0.67 | 0.79 |
| 20210919GT1R | 0.25 | 0.36 | 0.53 | 0.63 | 0.77 |
| 20210818GT3L | 0.27 | 0.35 | 0.48 | 0.59 | - |
| 20210818GT3R | 0.29 | 0.39 | 0.52 | 0.67 | 0.78 |
| Overall | 0.29 | 0.38 | 0.53 | 0.65 | 0.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, L.; Liu, M.; Zhang, D.; Li, C.; Wu, L. An Improved Size and Direction Adaptive Filtering Method for Bathymetry Using ATLAS ATL03 Data. Remote Sens. 2025, 17, 2242. https://doi.org/10.3390/rs17132242
Kuang L, Liu M, Zhang D, Li C, Wu L. An Improved Size and Direction Adaptive Filtering Method for Bathymetry Using ATLAS ATL03 Data. Remote Sensing. 2025; 17(13):2242. https://doi.org/10.3390/rs17132242
Chicago/Turabian StyleKuang, Lei, Mingquan Liu, Dongfang Zhang, Chengjun Li, and Lihe Wu. 2025. "An Improved Size and Direction Adaptive Filtering Method for Bathymetry Using ATLAS ATL03 Data" Remote Sensing 17, no. 13: 2242. https://doi.org/10.3390/rs17132242
APA StyleKuang, L., Liu, M., Zhang, D., Li, C., & Wu, L. (2025). An Improved Size and Direction Adaptive Filtering Method for Bathymetry Using ATLAS ATL03 Data. Remote Sensing, 17(13), 2242. https://doi.org/10.3390/rs17132242