1. Introduction
Cadastral registration and land administration are essential for the systematic management, ownership, and development of land resources in modern society. Accurate cadastral data not only supports property rights but also forms the basis for urban and regional planning, infrastructure development, and economic stability [
1,
2]. In urban settings, cadastral surveys are crucial for resolving discrepancies between official records and physical land use. Dense and complex property arrangements in cities mean that even minor errors in cadastral data can cause legal disputes, hinder infrastructure projects, and complicate land management. Accurate surveys help mitigate these issues, especially where aging analog maps still exist [
3].
The main role of cadastral documentation is to maintain current records of land ownership and boundaries. By integrating detailed cadastral data into digital mapping platforms, surveyors can reconcile official records with real-world conditions, creating a dependable base for property rights [
4,
5,
6]. This accuracy benefits both private interests and public needs such as urban planning, road construction, and utility management. Historically, the cadastre has been vital to social and economic stability, serving as a trusted record of ownership [
7]. Accurate data ensures fair taxation, effective resource allocation, and supports long-term development in both urban and rural contexts [
8,
9].
The value of cadastral documentation extends beyond legal ownership. It promotes transparency in land transactions, strengthens accountability, and supports sustainable land use and environmental stewardship [
10]. As urban areas expand and land pressures increase, reliable cadastral data helps balance public and private interests. In Romania [
11], cadastral practices are evolving as modern technologies are adopted to address persistent registration challenges. Tools such as unmanned aerial vehicle (UAV)-based surveys and mobile scanning, though still auxiliary, show strong potential to speed up and improve cadastral operations [
12].
The emergence of UAVs has revolutionized cadastral documentation and land administration, reconciling the disparity between expensive conventional survey techniques and contemporary, adaptable alternatives [
13]. UAV technology provides time-efficient, high-resolution orthoimages, which under suitable flight parameters, ground control integration, and favorable terrain conditions, can support land surveyors in obtaining necessary spatial data, such as visible boundary markers, building outlines, and accurate coordinate measurements. The comparatively low expense of UAVs has increased accessibility, rendering them a viable choice for smaller-scale cadastral or land survey endeavors. Nonetheless, their implementation in land administration initiatives presents challenges, requiring meticulous evaluation of many legal, technical, and logistical aspects [
14,
15].
Effective implementation of UAVs in land administration necessitates a comprehensive awareness of local regulations. Two principal legal aspects regulate UAV deployment: laws pertaining to cadastral surveys and those particular to UAV operations. Cadastral survey regulations are often explicit, outlining necessary survey characteristics, data quality criteria, procedural mandates, and the legal validity of the resultant maps. In environments where obvious physical boundaries are recognized for delineation, UAVs can enhance efficient image-based data acquisition [
16]. In Romania, UAV laws predominantly conform to European Union standards, facilitating the safe and organized use of UAVs under specified circumstances. Current cadastral regulations in Romania restrict the use of UAVs, whether autonomous or manually piloted, for official land registration, limiting their role to auxiliary functions in support of conventional total station and GNSS-based surveys. Although UAVs offer significant advantages for the efficient acquisition of spatial data, Romanian cadastral regulations have not yet fully endorsed them as standalone instruments for land surveying. In current practice, UAVs are primarily employed in extravilan (non-urban) areas, where the demand for ultra-high-resolution detail is somewhat lower and where regulatory constraints are fewer. However, these terrains often pose challenges due to the limited presence of distinguishable and stable photo-identifiable features, which may reduce the overall accuracy of image-based georeferencing. In contrast, UAV use in densely built urban environments is limited not only by stricter airspace regulations but also by the stringent accuracy requirements that are better addressed through traditional instrumentation and terrestrial survey methods. As UAV technology progresses, Romanian surveyors must adhere to both EU-wide UAV regulations and local restrictions, frequently necessitating specific approvals, pilot registrations, and compliance with national aviation standards.
Simultaneous localization and mapping (SLAM) technology has emerged as a transformative tool for cadastral surveying [
17], particularly in areas where conventional methods, such as total stations (TSs), GNSSs, or terrestrial laser scanners (TLSs), are hindered by technical or logistical limitations. Unlike GNSSs, which require satellite visibility, SLAM systems can operate without fixed positions or direct sky exposure, making them highly effective for 3D mapping in urban, indoor, or densely vegetated environments. SLAM offers superior mobility and rapid data acquisition compared to total stations, enabling efficient surveying in narrow alleys or interior spaces without line-of-sight constraints [
18]. While slightly less accurate than TLS, SLAM provides faster setup and continuous data collection, making it suitable for large-scale surveys.
SLAM scanners use LiDAR in conjunction with inertial measuring units (IMUs) to update their position in real time, allowing dynamic, mobile mapping [
19,
20,
21,
22]. This capability supports efficient data capture in settings where GNSS signals are weak or absent, such as urban canyons or complex indoor areas. Their insensitivity to ambient light and compact form make them ideal for tight or obstructed environments, heritage sites, or areas with heavy vegetation.
The centimeter-scale 3D point clouds produced by SLAM can be georeferenced to cadastral systems like Romania’s Stereographic 1970, enhancing the digitization of boundaries and structures. This makes SLAM particularly valuable for documenting complex features where conventional photogrammetry or GNSS might struggle. Moreover, SLAM integrates well with other methods, such as UAV-based orthophotos and total station data, enabling comprehensive cadastral maps that combine aerial and terrestrial perspectives. Such integration improves the precision and completeness of building outlines, parcel boundaries, and topographic details in challenging environments.
Recent studies have investigated the performance of various SLAM algorithms and their applicability across different environments, from construction sites and urban cadastral mapping to large-scale indoor localization. These studies provide valuable insights into the accuracy thresholds achievable with SLAM technology and the factors influencing its precision, particularly in comparison to total station measurements, terrestrial laser scanning (TLS), and GNSS-based methods.
According to Yarovoi and Cho [
23], their evaluation of SLAM algorithms for construction robotics demonstrated that LIO-SAM achieved the highest accuracy among tested methods, maintaining tracking throughout all tested sequences. The root mean square error (RMSE) for translational errors in their experiments ranged from 0.095 m to 0.311 m, with rotational errors as low as 0.9°. Comparatively, LeGO-LOAM and ART-SLAM struggled with rapid movements and confined spaces, often resulting in drift or loss of tracking. Their findings highlight that integrating LiDAR with an IMU significantly improves positional accuracy by reducing drift and aiding in robust localization, particularly in complex environments. According to Shoujun Jia et al. [
24], their proposed cross-correction LiDAR SLAM method achieved an absolute map error of approximately 1 cm and a relative map error of 0.2% in problematic scenarios. The method improved data association and cumulative error elimination, ensuring higher mapping accuracy compared to five other state-of-the-art SLAM techniques. Their results confirm that LiDAR SLAM, when optimized with robust error correction, can achieve highly accurate 2D maps suitable for precise indoor modeling. According to Alharake et al. [
25], SLAM-based vehicle localization using cadastral maps demonstrated promising results in urban environments. The study highlighted that the integration of cadastral plans into a likelihood field representation constrained SLAM drift, improving the lateral position and heading accuracy of the vehicle. The accuracy assessment revealed that in high-rise building environments, the method achieved a mean longitudinal error of 0.118 m with an RMSE of 0.255 m, while in residential areas with smaller houses, the mean error increased to 0.215 m with an RMSE of 0.382 m. These results suggest that the effectiveness of SLAM-based cadastral mapping varies depending on the urban environment, with high-rise areas providing more distinct features for localization accuracy. Additionally, while vertical planes yielded better results in structured environments, raw scan data provided better results in cluttered residential areas. According to Chio et al. [
26], a handheld LiDAR scanner employing SLAM technology was evaluated for urban cadastral surveys in Taiwan. The study found that approximately 97% of digitized cadastral detail positions had an error of less than 15 cm when compared to total station check points. The results confirmed the feasibility of SLAM-based handheld LiDAR for cadastral detail surveys, demonstrating accuracy sufficient for urban cadastral applications. According to Hamal et al. [
27], the accuracy of a wearable mobile laser system (WMLS) for cadastral mapping was evaluated by comparing SLAM-extracted data with total station measurements. The study found that WMLS achieved an average error of ±3 cm after georeferencing, demonstrating its viability for cadastral applications, particularly in environments where traditional GNSS-based methods struggle due to signal obstructions. According to Keitaanniemi et al. [
18], the integration of SLAM laser scanning (LS) with terrestrial laser scanning (TLS) for 3D indoor mapping resulted in an accuracy ranging between 18 mm and 51 mm when using target sphere comparisons. The study demonstrated that SLAM LS significantly improves the efficiency of large-scale indoor data collection, reducing the labor-intensive process of registering non-overlapping TLS point clouds. The alignment accuracy of SLAM LS to the reference dataset was found to be within 14.84 mm for a path that covered entire rooms and 11.99 mm for a shorter scanning path. While the method showed promise for facilitating the rapid registration of TLS data, the results indicated that SLAM LS exhibits lower accuracy in large or featureless spaces, requiring additional control measures to ensure precision. According to Liu et al. [
28], the SLAMB&MAI methodology introduced a novel benchmarking approach for SLAM accuracy, particularly in localization and mapping. The study demonstrated that applying a Center Point Registration-Iterative Closest Point (CPR-ICP) method improved mapping accuracy by an average of 15%. The results showed that SLAM-based mapping errors could be systematically reduced through trajectory error correction, with reductions of 12% for medium-scale scenes and up to 20% for large-scale environments. This study underscores the potential of refining SLAM-generated maps to achieve higher precision, particularly in scenarios requiring reliable spatial reconstructions.
These considerations justify improving conventional cadastral surveying and mapping techniques by using novel instruments and methods. Conventional instruments, like total stations and GNSS, while important for accurate cadastral documentation, frequently fall short in addressing the complexities of contemporary built environments and detailed bordering complexities. The integration of UAV-based orthophotos delivers a crucial aerial viewpoint, supplying high-resolution, near real-time imagery to accurately help define parcel boundaries, building contours, and other spatial features with efficiency and reliability. Moreover, mobile SLAM technology, with its ability to generate intricate 3D mappings in complex, confined environments, enhances UAV capabilities, allowing surveyors to collect data from difficult vantage points, such as building sides or obstructed routes. The integration of various contemporary techniques into a singular methodology not only improves the accuracy and efficiency of cadastral surveys but also promotes a more comprehensive approach to land management, ultimately enabling the production of up-to-date and legally reliable cadastral maps. This modernization is important for effectively depicting contemporary dynamic land situations, where exact boundary delineation and comprehensive property documentation are increasingly critical for property rights, urban planning, and sustainable development. In this context, the practical innovation of our approach lies not in individual technologies, but in the way we combined terrestrial and aerial SLAM (dual SLAM) with RTK-enabled UAV photogrammetry into a unified, field-tested workflow. Applied in a legally constrained environment like Romania and at a structurally complex heritage site such as Charlottenburg, this integration offers a replicable and scalable solution for improving cadastral operations where traditional methods alone are limited by visibility, access, or regulatory barriers.
2. Materials and Methods
2.1. Challenges and Current Status of Land Registration in Romania
Romania’s land registration system has undergone significant transformations due to shifting political regimes and administrative models. Historically, two systems coexisted: the inscription–transcription system in Moldavia and Wallachia, and the land book system in Transylvania, shaped by Austro-Hungarian influence. The communist era brought widespread expropriations and the dismantling of traditional ownership rights, while post-1989 reforms have aimed to restore and systematize land tenure, albeit with limited consistency.
To address the need for standardized land records, Romania launched the National Program for Land Registration in 2015, managed by the National Agency for Cadastre and Real Estate Publicity (ANCPI). Although aimed at full nationwide registration by 2023, progress has been slow, with only a limited number of administrative units registered as of early 2023. The program, governed by Law 7/1996 and Government Ordinance 294/2015, has been critiqued for lacking clear implementation strategies and measurable goals, leading to delays and inefficiencies [
29].
Romanian surveyors use both GNSS and total station technologies in cadastral work. GNSS is widely applied for efficient surveying and geospatial observations, particularly in open, unobstructed environments. In contrast, total stations offer superior accuracy but are more limited in terms of coverage and operational efficiency, thus being used predominantly for construction surveying and layout projects [
11]. Geospatial and GIS software facilitate the processing of spatial data, the execution of spatial analysis, and the creation of cadastral maps. Despite the technological progress of these instruments, surveyors face considerable obstacles. Geographic intricacies, stringent accuracy demands, and restricted access in rural and mountainous regions burden both resources and job efficiency. Moreover, technology standards and people demand fluctuate throughout various locations, impacting the uniformity and quality of registration initiatives.
Engaging stakeholders has been a persistent challenge. Although ANCPI leads the program’s strategy, its collaboration with certified surveyors, academics, and local stakeholders has been minimal. This lack of engagement has resulted in misaligned strategies and weak stakeholder support. Institutional and legislative obstacles also persist. Limited staffing, inconsistent equipment across regions, and complex legal frameworks, especially unresolved ownership claims and outdated rural maps—have slowed progress. Budget constraints further hinder implementation, particularly in low-income areas [
30]. To address these challenges, improvements are needed. Standardizing the use of GNSS, total stations, and other survey tools can enhance accuracy and consistency. Simplifying legal and institutional procedures would help coordinate efforts with local authorities, streamline property verification, and speed up registration.
The National Program for Systematic Land Registration (PNCCF), managed by ANCPI, follows a structured approach involving private firms for surveying and regional cadastral offices (OCPI) for validation. By 2022, only about 4% of administrative units were fully registered, revealing significant delays. Although ANCPI supports modern surveying tools, strict accuracy standards, particularly in urban areas, have increased contractor workloads. This reflects a system still heavily reliant on traditional fieldwork, overlooking the efficiency potential of newer technologies.
Surveyors in Romania commonly rely on field measurements and GNSS to delineate property boundaries, with UAV photogrammetry used occasionally, primarily in less built-up areas. While the PNCCF allows orthophotos and aerial imagery as supplementary tools, they cannot replace ground surveys. This reliance on conventional methods significantly extends project timelines and costs. A fit-for-purpose approach, adapting precision levels to local context, could improve efficiency and flexibility.
UAVs have gained traction in Romania as a cost-effective surveying tool, especially in hard-to-reach areas where traditional methods are resource-intensive [
31,
32]. High-resolution UAV imagery aids in border delineation and land-use mapping, though current regulations often require supplementary validation. According to PNCCF data, UAVs are used in about one-third of surveyed localities, mostly in support roles rather than as the main data source.
Despite their potential, strict technical and legislative constraints limit UAVs’ integration into Romania’s cadastral workflow. Regulatory accuracy thresholds, particularly stringent in urban areas, remain difficult to meet using UAV data alone. Nevertheless, UAVs align well with fit-for-purpose principles, offering faster, more affordable registration, especially when combined with participatory approaches in rural regions. To realize their full potential, Romania must reconsider spatial accuracy standards in less demanding environments. Doing so could ease reliance on time-consuming field surveys and accelerate land registration in underdeveloped areas [
33].
Overall, while Romania has adopted modern surveying tools, significant challenges remain. A more adaptable framework that relaxes accuracy requirements where feasible could support broader UAV integration, streamline land registration, and foster a more inclusive and responsive cadastral system.
2.2. Methodologic Workflow
The need for an efficient cadastral survey methodology stem from the increasing demands for accurate and rapid mapping in complex environments. Traditional cadastral surveys, while reliable, are often time-consuming, labor-intensive, and limited in their adaptability to challenging terrains or large-scale projects. This study explores an integrative cadastral mapping workflow in the Romanian context, combining UAV photogrammetry, and terrestrial and UAV-mounted SLAM technologies with conventional geodetic measurements. While similar methodologies have been applied internationally for building outline extraction and cadastral updates, this study focuses on adapting and validating such approaches within the current technical, available, and cost-effective framework. The methodology is demonstrated through an optimal case study: Charlottenburg, the only circular village in Romania, which presents unique geometric and structural challenges ideal for testing the robustness of the proposed workflow.
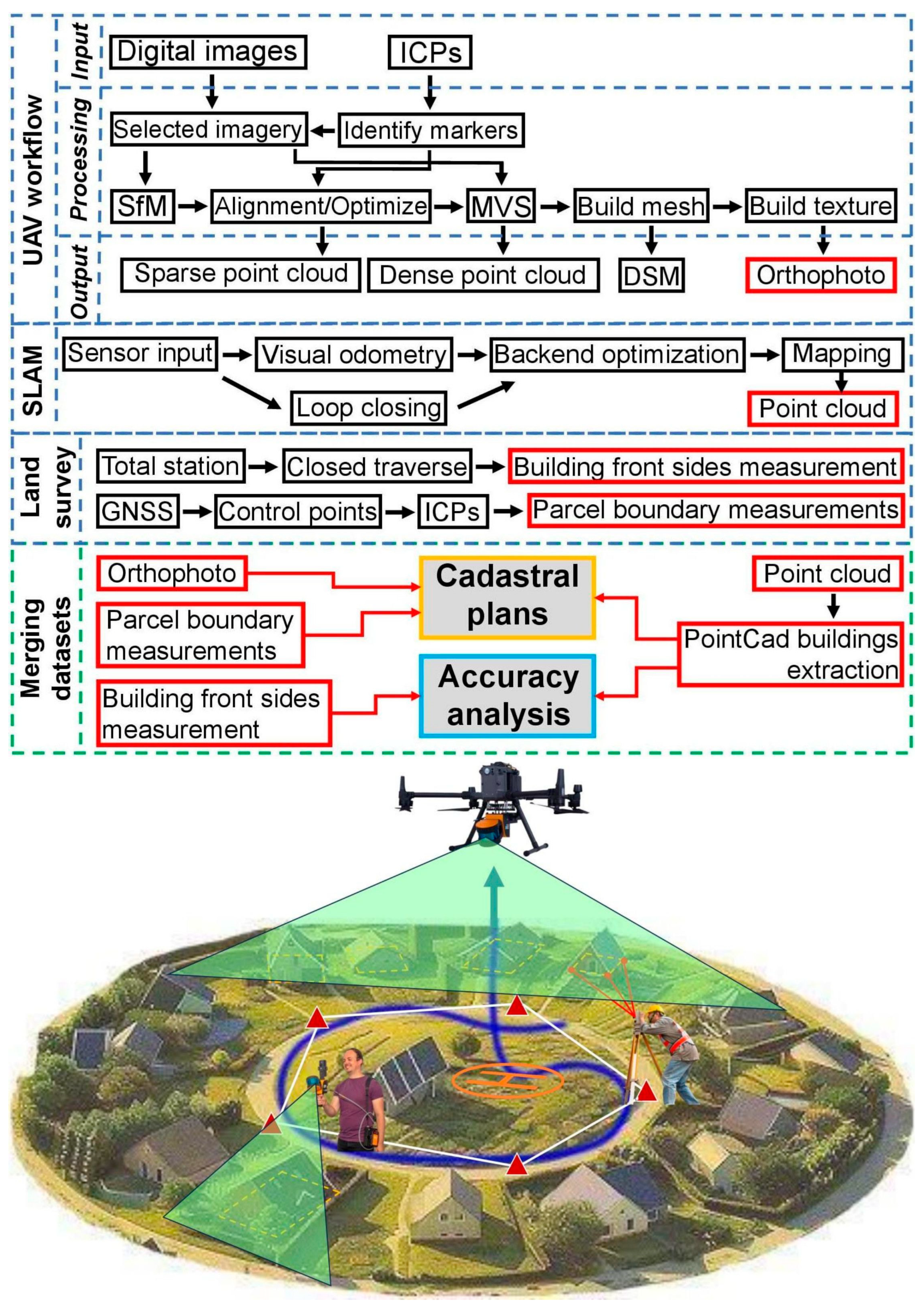
The workflow began with a UAV photogrammetry survey aimed at capturing high-resolution aerial imagery and generating a dense point cloud. The UAV survey utilized the DJI M300 UAV equipped with an RTK system, which allowed each captured image to be precisely georeferenced with real-time coordinates. This ensured that the final outputs, including orthophotos and point clouds, were inherently georeferenced. Additionally, ICPs were employed not for georeferencing but for verification purposes and accuracy analysis, ensuring the reliability of the final dataset. The photogrammetry process involved multiple stages, as illustrated in the
Figure 1. Selected images were processed through structure from motion (SfM), multi-view stereo (MVS), and mesh building to produce digital surface models (DSMs) and orthophotos. These deliverables provided a comprehensive view of the terrain and structural features, critical for delineating parcel boundaries and even building footprints to a certain degree.
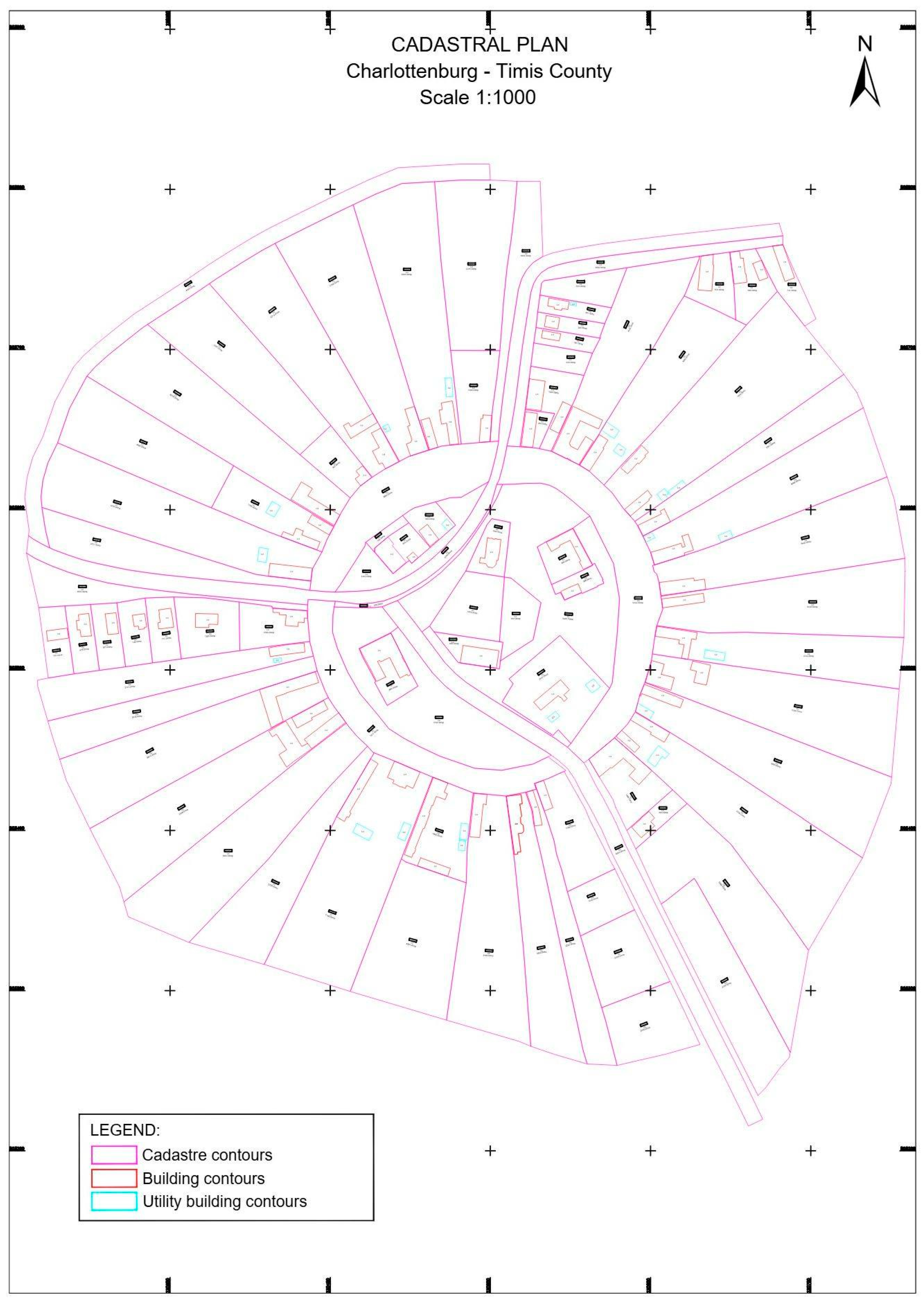
Simultaneously, a terrestrial SLAM survey was conducted to capture precise measurements of building front sides and inaccessible areas. The SLAM device, mounted on a terrestrial platform, used visual odometry and backend optimization to generate a detailed point cloud of the surveyed region. Loop-closing algorithms further enhanced the accuracy of the dataset, making it particularly useful in dense urban-like layouts or areas with occlusions. In the second stage, the SLAM device was mounted on the UAV to expand its coverage and capture areas that were difficult to access via terrestrial means. This hybrid approach combined the strengths of both aerial and terrestrial mapping, ensuring comprehensive coverage of the circular village’s unique spatial configuration. The final stage involved the merging of datasets. Orthophoto from UAV photogrammetry was integrated with SLAM-derived point clouds and terrestrial geodetic measurements. Parcel boundary measurements were derived from both UAV and terrestrial data, ensuring high accuracy in cadastral mapping. The building front sides, mapped via SLAM, were added as precise layers for creating comprehensive cadastral plans.
The deliverables of this workflow include orthophotos, parcel boundary measurements, building front side data, and accurate cadastral plans. These outputs are important for land management, urban planning, and infrastructure development. This methodology not only enhances the efficiency and precision of cadastral surveys but also demonstrates scalability for broader applications in geospatial analysis. The proposed method integrates advanced technologies to overcome the limitations of traditional cadastral surveys. By leveraging the strengths of UAV photogrammetry, SLAM, and conventional geodetic measurements, this workflow provides a robust and scalable solution for modern cadastral mapping, particularly in geometrically complex or culturally significant areas like Charlottenburg.
2.3. Study Area
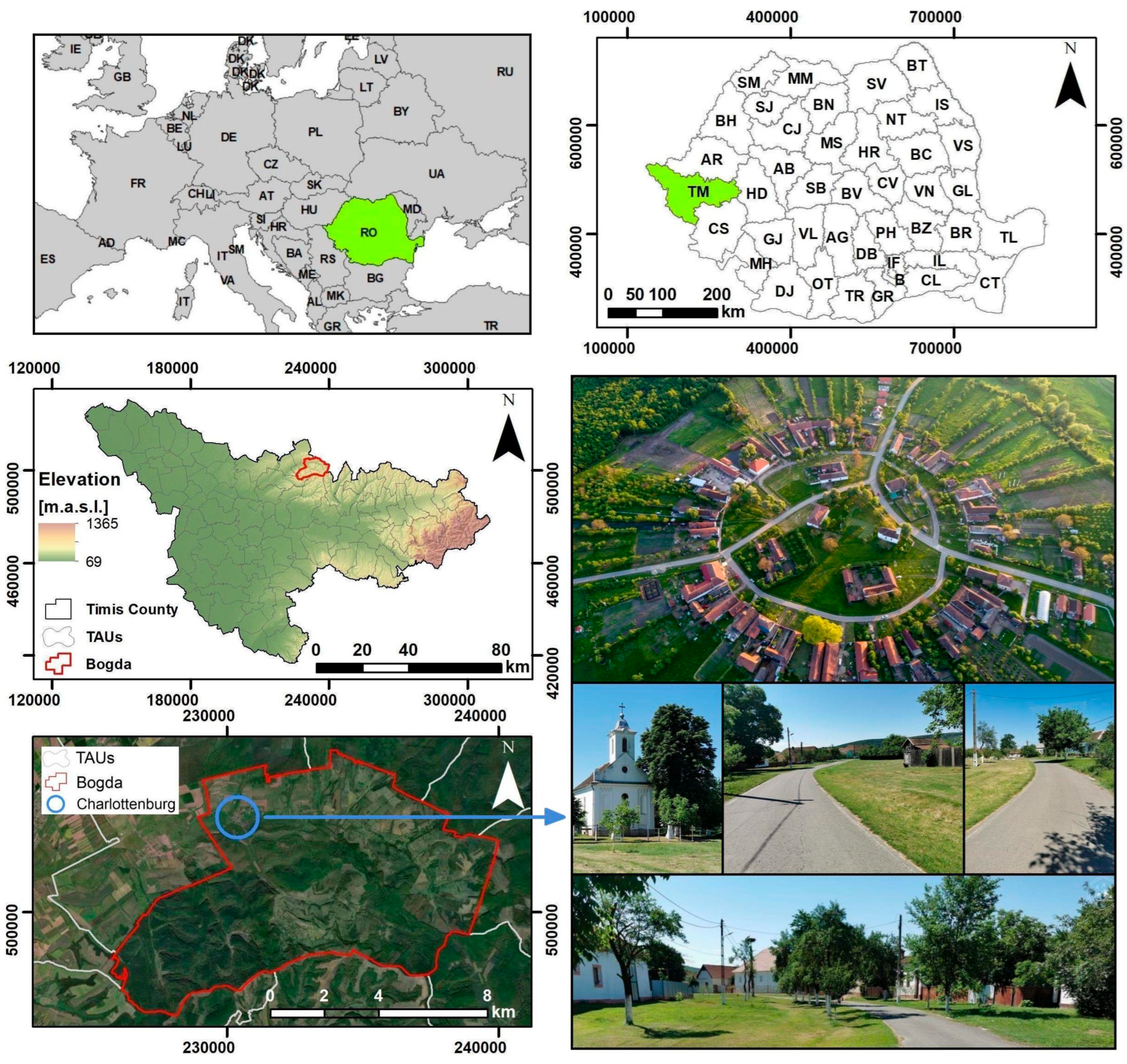
Charlottenburg, situated at 45°58′52″N 21°31′24″E, is recognized as the only circular settlement in Romania, serving as a distinctive study location with historical, cultural, and architectural importance (
Figure 2). Located approximately 45 km from Timișoara in Timiș County, Charlottenburg is distinguished by its unique circular design and its representation of the profound heritage of German colonization in the Banat area [
34]. Established in 1771, this small village is acknowledged as a historic monument and provides insight into the unique architecture and cultural influences of the period.
Charlottenburg was founded during the second wave of Germanic colonization in the Banat region, under the Habsburg Empire. Its unique radial layout, designed by Karl-Samuel Neumann Edler von Buchholt, features uniform dwellings arranged around a central square originally planted with mulberry trees, later replaced by a school and Roman Catholic church. Historically associated with sericulture and hunting, the area includes one of Romania’s oldest hunting parks. Today, Charlottenburg is a protected historical site, attracting visitors with its preserved architecture and cultural heritage, making it a worthwhile case study for pilot implementation of innovative cadastral techniques.
Beyond its historical and architectural value, Charlottenburg presents an ideal test site for modern land surveying methodologies. The village’s compact size and distinct geometric layout provide a manageable environment for piloting advanced surveying techniques. This study integrates UAV photogrammetry and SLAM-based LiDAR scanning with conventional GNSS and total station measurements, optimizing the cadastral documentation process. The high-resolution orthophotos enable precise parcel delineation, while SLAM-derived point clouds allow for semi-automated extraction of building footprints. The successful implementation of these technologies in Charlottenburg demonstrates the potential for enhancing land registration workflows, improving accuracy, and streamlining cadastral surveying in Romania.
2.4. Instrumentation, Data Acquisition, and Processing
In the current case study regarding cadastral mapping in Charlottenburg village, Timiș County, Romania, the GeoMax Zoom95 Robotic Total Station (GeoMax AG, Espenstrasse 135, 9443 Widnau, Switzerland) was employed to measure in reflectorless mode the front sides of the buildings by a closed traverse around the village center. This advanced surveying instrument proved instrumental in capturing precise measurements of building facades, eliminating the need for physical prisms, which are often required in traditional surveying methods. The reflectorless capability of the GeoMax Zoom95 ensured accurate data collection even in challenging environments, but with dependency in terms of front side visibility from the roadway, with very limited survey points on the lateral or back sides of the constructions. Thus, the total station survey serves as the validation and accuracy analysis field truth for the SLAM-extracted building contours. The GNSS instrument used to establish control points for both the total station survey and the photogrammetry accuracy evaluation was the Zenith60 Pro GNSS smart antenna, part of the GeoMax ecosystem. This high-precision device ensures reliable performance even in challenging environments such as those with a dense canopy or urban areas. Its tilt compensation capability enables measurements of otherwise inaccessible points, making it a valuable tool for modern surveying and construction tasks. The technical specifications of the GeoMax Zenith60 Pro GNSS Smart Antenna (GeoMax AG, Espenstrasse 135, 9443 Widnau, Switzerland) used in this study are summarized in
Table 1. Each of the eight reference points used as independent check points (ICPs) for UAV georeferencing validation and as control points for the total station and SLAM surveys was measured using the Zenith60 Pro GNSS receiver. To ensure positional reliability, each point was recorded as an average of ten GNSS epochs. According to device specifications and field performance, the achieved horizontal accuracy was approximately 10–11 mm, while the vertical accuracy range was 17–18 mm. All instruments and data acquisition setups described are illustrated in
Figure 3.
The land survey also employed a combination of UAV-based photogrammetry and terrestrial and UAV-based SLAM technology to achieve an accurate and efficient cadastral and topographic survey. The primary aerial survey was conducted using a DJI Matrice 300 RTK (SZ DJI Technology Co., Ltd., Shenzhen, China), a high-performance UAV equipped with an onboard real-time kinematic (RTK) positioning system. The RTK module ensured that each captured image was georeferenced with centimeter-level accuracy, minimizing the need for extensive ground control points while maintaining high spatial fidelity [
35]. As mentioned earlier, ICPs distributed across the study area were used for post-processing accuracy verification. These ICPs were measured using the GNSS instrumentation. The UAV was equipped with a Zenmuse P1 (DJI Enterprise, Shenzhen, China), a full-frame 45 MP photogrammetric camera that provided high-resolution imagery. The integration of RTK corrections with the P1 sensor enhanced the precision of aerial triangulation, enabling the generation of dense point clouds, digital surface models (DSMs), and orthophotos with a high level of detail [
36].
The integration of terrestrial SLAM-based mobile mapping into the survey methodology was important for addressing occlusions inherent in UAV photogrammetry. The GeoSLAM ZEB Horizon handheld LiDAR scanner (GeoSLAM Ltd., Nottingham, UK) was employed to capture high-density point clouds, ensuring precise documentation of building facades, property boundaries, and other vertical elements crucial for cadastral mapping. The SLAM algorithm enabled real-time mapping in dynamic urban environments, ensuring accurate alignment between terrestrial and aerial datasets. Beyond handheld deployment, the SLAM unit was mounted on a UAV, enabling a hybrid scanning approach that improved coverage and enhanced mapping accuracy in the circular village layout of the study area.
The ZEB Horizon mobile LiDAR system was employed in this study due to its compatibility with indoor and outdoor mapping scenarios. It operates with a scanning range of up to 100 m and a capture rate of 300,000 points per second, making it suitable for generating detailed point clouds in complex environments. The system uses a 16-beam sensor array to provide a wide field of view and consistent data coverage, offering a relative accuracy of approximately 6 mm under optimal conditions, with typical values in the range of 6–15 mm depending on environmental complexity and operator movement. This level of precision aligns well with cadastral requirements for building outline documentation [
21]. Its lightweight and compact form allows for various mounting options, including handheld, vehicle-based, UAV-based, or extended configurations, facilitating its integration into diverse survey workflows. Additionally, the device supports real-time feedback, enabling users to assess data acquisition in the field and minimize data omission. The optional ZEB Vision module offers panoramic imagery and the ability to colorize point clouds, improving interpretability in post-processing without affecting core spatial accuracy.
For UAV integration, the ZEB Horizon features a quick-release UAV mount, enabling seamless transition from terrestrial to aerial scanning. It is compatible with UAV platforms such as the DJI Matrice 300 RTK, extending survey capabilities to elevated and hard-to-reach structures. When mounted on a UAV, the ZEB Horizon enhances aerial data collection while preserving the mobility of the handheld unit.
Beyond cadastral applications, the ZEB Horizon is widely used in real estate mapping, providing a streamlined solution for property surveys. Its ability to seamlessly transition between indoor and outdoor spaces enables efficient and accurate floorplan creation with minimal disruption to occupants. This technology offers a cost-effective and time-efficient solution, allowing surveyors to deliver high-quality property documentation, supporting decision-making in real estate development, urban planning, and infrastructure management.
2.4.1. UAV Based Survey and Processing
The UAV-based photogrammetric survey utilized the DJI Matrice 300 RTK, equipped with the Zenmuse P1 camera, to generate high-resolution geospatial data for cadastral documentation. This workflow leveraged real-time kinematic (RTK) positioning, which enabled direct georeferencing of images, significantly reducing the need for GCPs. The RTK module communicated with a GNSS correction network, ensuring centimeter-level positioning accuracy during flight, making it an efficient alternative to traditional GCP-based georeferencing [
35,
36].
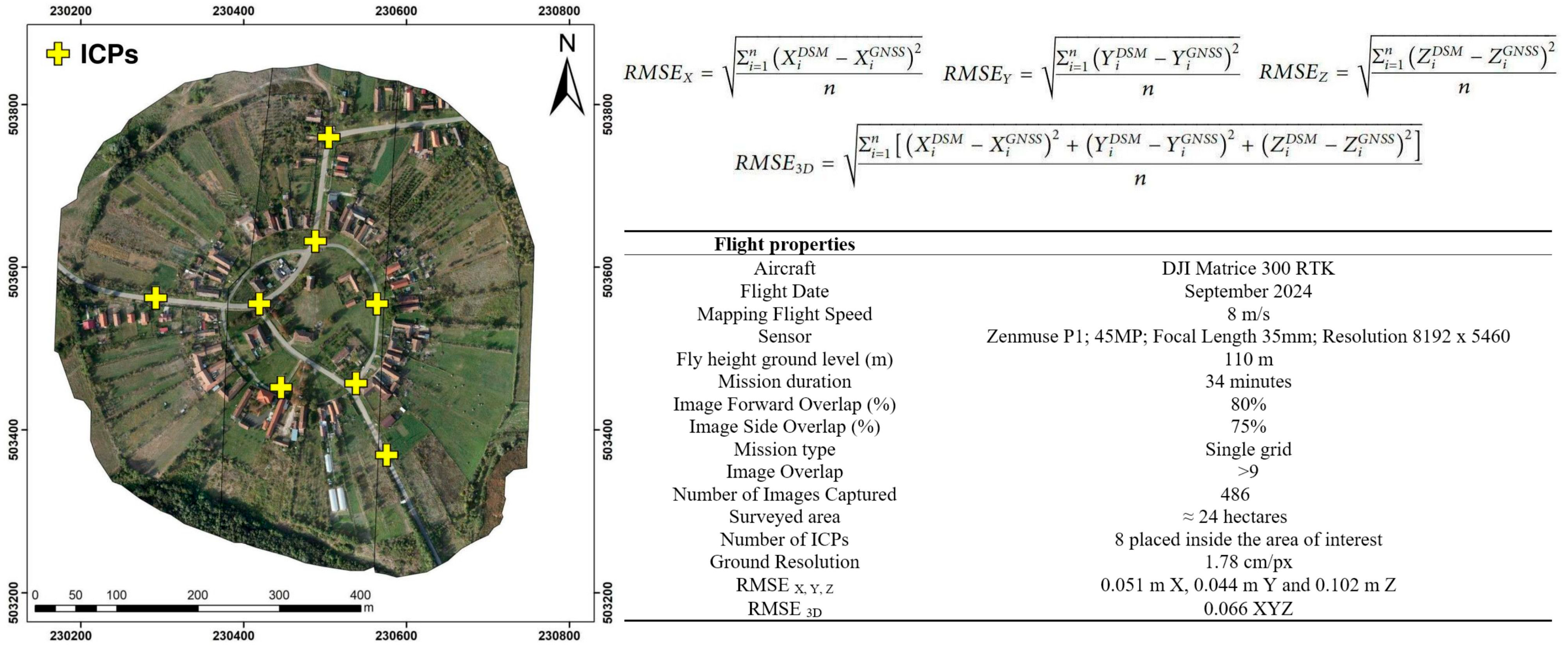
The Zenmuse P1 camera, with its 45-megapixel full-frame sensor, played a crucial role in achieving high photogrammetric accuracy. The smart oblique capture mode enabled the collection of both nadir and oblique imagery, improving 3D model reconstruction and feature definition. The flight was conducted at 110 m altitude, with an 80% forward and 75% side overlap, ensuring optimal image alignment and seamless model generation. The survey covered approximately 24 hectares, capturing 486 images at a ground sampling distance (GSD) of 1.78 cm/px.
Following data collection, Agisoft Metashape 2.1.0 was used for photogrammetric processing, including image alignment, tie point and dense point cloud generation, mesh creation, DSM and orthophoto generation [
37,
38,
39]. The embedded RTK coordinates minimized geometric distortions typically encountered in non-RTK UAV photogrammetry. To ensure reliable georeferencing evaluation, a total of eight ICPs were strategically placed and measured using GNSS technology. Their distribution followed a relatively uniform spatial layout, respecting the circular geometry of Charlottenburg village. Given the minimal elevation variation across the site, vertical positioning was not a limiting factor in point placement. The selected configuration was designed to maximize geometric coverage and provide accurate validation across the entire study area. To ensure accuracy, ICPs were measured and used for accuracy assessment, with the RMSE values calculated using the provided formulas. The results confirmed high spatial accuracy, with RMSE values of 0.051 m (X), 0.044 m (Y), and 0.102 m (Z), leading to a 3D RMSE of 0.066 m, demonstrating the reliability of the obtained data for cadastral and topographic applications, as illustrated in
Figure 4.
This RTK-enabled UAV photogrammetric workflow provides a highly efficient and accurate approach to cadastral mapping, significantly reducing fieldwork time compared to traditional surveying methods. While GCP placement is no longer mandatory, ICPs remain necessary for validation, ensuring compliance with high-precision land survey standards. The combination of RTK photogrammetry with post-processing accuracy assessments offers a robust and reproducible methodology for large-scale cadastral applications.
2.4.2. SLAM Based Survey and Processing
Accurate cadastral mapping and topographic surveying are fundamental to modern land management, urban planning, and infrastructure development [
3,
5]. Traditional methods relying on total stations and terrestrial GNSS-based surveys, while highly accurate, are often labor-intensive and time-consuming. The integration of UAV-based LiDAR scanning, photogrammetry, and terrestrial LiDAR scanning offers a highly efficient alternative, improving data acquisition speed and accuracy in mapping built environments. The combination of these technologies enables the generation of detailed elevation models and facilitates the extraction of precise building geometries, which are important for cadastral applications [
8]. This study presents a structured methodology for processing point cloud data acquired through UAV-based and terrestrial LiDAR, employing Pix4Dsurvey version 1.69.0 and PointCab Origins 4.2 R10 software for classification, segmentation, and vectorization.
In this study, the SLAM sensor (ZEB Horizon) was deployed in a dual configuration to maximize data acquisition in areas where traditional surveying methods face limitations. Initially, the sensor was operated in a terrestrial mobile scanning mode, mounted on a backpack, and carried on foot around the central area of the village. The operator followed a predefined path to ensure full façade coverage, especially along the internal ring road where access was possible. In the same field session, the identical SLAM device was transferred and mounted on a UAV (DJI Matrice 300 RTK) and launched vertically, flying at a low altitude without a predefined horizontal trajectory. This complementary aerial SLAM acquisition captured rooftops, internal courtyards, and areas not visible from ground level due to fences, vegetation, or building alignment.
To unify the two point clouds, the iterative closest point algorithm was applied using the SLAM system’s integrated post-processing software. The terrestrial SLAM scan was georeferenced to the national coordinate system (Stereographic 1970) using a set of ground control points measured via RTK-GNSS. These ICPs served as the spatial anchor for the terrestrial scan. Once aligned, the aerial SLAM dataset inherited this spatial reference through cloud-to-cloud registration, resulting in a seamless and consistent geospatial dataset. This configuration ensured high positional accuracy while optimizing field time and adapting to the physical constraints of the site.
The initial processing phase was conducted using Pix4D Survey, a specialized software for handling large-scale point clouds derived from UAV photogrammetry and terrestrial LiDAR. The classification process involved an initial terrain filtering step, set to a 0.5 m threshold. This stage differentiates between terrain and non-terrain points, with the 0–0.5 m range classified as terrain and points exceeding 0.5 m identified as non-terrain for further processing. The non-terrain category, consisting primarily of buildings and vegetation, is then exported as a separate dataset to refine the classification further.
Following the initial classification, the non-terrain dataset was reimported into the workflow for secondary filtering. In this phase, a second terrain filter was applied to refine the segmentation process further. Points within the 0.5–1 m range were reclassified as boundaries, while those exceeding 1 m were categorized as non-terrain and excluded from the elevation model. This hierarchical filtering approach ensures that low vegetation, taller vegetation and small topographic variations are eliminated, while buildings and other features in the 0.5–1 m interval above ground are distinctly segmented for cadastral mapping purposes. Once the refined terrain dataset is exported, it undergoes a semi-automated cleaning process to remove inconsistencies, vegetation, and residual noise. This step is crucial in ensuring that the segmented model accurately represents the surveyed environment. Following this, wall detection algorithms are applied to identify vertical structures, an important step for delineating building footprints in cadastral applications. The result is a structured and filtered point cloud dataset that accurately differentiates built structures from terrain and elements above it, facilitating subsequent accurate topographic and cadastral mapping.
After the primary classification and filtering in Pix4D Survey, the processed point cloud is further refined using PointCab, a software platform useful for vectorization and structured feature extraction. The workflow in PointCab ensures that the clean and filtered dataset is converted into vector format, enabling seamless integration into cadastral mapping frameworks. The process begins with the creation of a new project, where only the filtered and classified point cloud corresponding to building structures is selected. This step ensures that unnecessary data points, such as vegetation and other terrain features, are excluded from the cadastral mapping process. Once the relevant point cloud data is isolated, the vectorization process is executed based on predefined criteria. A minimum linear detection threshold of 0.3 m is applied to identify and extract structural features such as building facades and parcel boundaries. Additionally, a histogram-based adaptation is used to refine the selection of linear elements, ensuring that the extracted features align with cadastral accuracy requirements. The workflow stages are illustrated as a collage in
Figure 5, showing the sequential processing steps in Pix4D Survey and PointCab.
Once the vectorization process is complete, the extracted features undergo automatic and small manual refinements to optimize accuracy. The finalized vector dataset is then exported in DXF format, a widely used file type in GIS and CAD applications. This enables seamless integration of the processed data into cadastral plans, building documentation, and urban planning projects, ensuring that the surveyed land data can be effectively utilized in regulatory and design workflows. The methodology presented in this study demonstrates the efficiency and accuracy of integrating UAV and terrestrial LiDAR scanning for cadastral mapping applications. By leveraging Pix4D Survey for terrain classification and PointCab for structured vectorization, the proposed workflow ensures good accuracy and efficiency in delineating building footprints, parcel boundaries, and other useful cadastral elements. The stepwise classification process, incorporating semi-automated terrain filtering, wall detection, and feature extraction, significantly enhances the precision of cadastral surveys while reducing the manual workload traditionally associated with these processes.
The data processing workflow used in this study integrated a combination of automated, semi-automated, and manual procedures, with the primary operations executed using Pix4D Survey and PointCab. The initial stages of the pipeline, specifically dense point cloud generation from UAV photogrammetry and SLAM data, as well as basic classification filters distinguishing ground and non-ground elements, were fully automated. These steps relied on the software’s default algorithms and required no manual input, ensuring a consistent and efficient baseline for subsequent processing.
Further stages, including wall detection, segmentation, and vectorization, were semi-automated. The software enabled rule-based extraction of linear and structural features using configurable parameters, such as height thresholds and geometric continuity, which were manually adjusted to match the characteristics of the study area. Additionally, noise reduction routines employed spatial filters that isolated vegetation, isolated returns, or irregular data artifacts; however, operator oversight was necessary to identify and correct residual errors, particularly in densely built-up or partially occluded areas.
The final refinement phase involved manual visual validation and correction, focusing primarily on the alignment and continuity of building outlines, removal of minor classification errors, and consolidation of fragmented features. These tasks ensured that the vector outputs met cadastral mapping standards in terms of spatial completeness and topological coherence. Overall, approximately 75% of the processing pipeline was automated, with the remaining 25% requiring manual intervention, primarily during the final editing and quality assurance stages. This balance reflects the current capabilities of commercial geospatial software packages, which streamline much of the processing but still rely on professional judgment for detail-sensitive applications such as cadastral documentation.
The configuration employed in this study, by combining terrestrial SLAM scanning via backpack with complementary UAV-mounted SLAM, merged using the iterative closest point algorithm and georeferenced through RTK-GNSS control points, proved to be the most effective approach for this use. It offered an optimal balance between accuracy, coverage, time efficiency, and adaptability to site-specific constraints. This workflow minimized field time while ensuring high-quality 2.5D building footprint extraction for cadastral documentation, making it both cost-effective and technically robust.
2.5. Data Alignment and Error Handling
The integration of multi-source geospatial datasets in a cadastral survey demands a robust and consistent data alignment workflow to ensure spatial accuracy and minimize error propagation. In this study, all measurements that included UAV RTK data, SLAM-derived point clouds, and total station reference points were rigorously established within the official Romanian national coordinate system, Stereographic 1970. This projection is the legal standard for cadastral and geodetic activities in Romania and served as the common reference frame throughout the project.
To ensure consistency across all datasets, a set of eight independent check points (ICPs) were measured using GNSS-RTK techniques, as previously detailed in
Section 2.4. These ICPs served a multi-functional role in the survey workflow. First, they were employed to verify the geospatial accuracy of the UAV photogrammetric outputs (orthophotos and dense point clouds) generated via onboard RTK positioning. The calculated RMSE values, 0.051 m (X), 0.044 m (Y), and 0.102 m (Z), leading to a 3D RMSE of 0.066 m, confirmed the appropriate accuracy of the UAV-based positioning.
Second, the same ICPs were used as control points for the georeferencing of terrestrial SLAM data. The mobile SLAM scanner (ZEB Horizon) was operated in a mixture of handheld and backpack configurations along a closed path in the village and subsequently georeferenced to the national coordinate system using the known ICP locations. Third, once the terrestrial SLAM dataset was georeferenced, the aerial SLAM scan captured via UAV-mounted deployment was aligned to the terrestrial SLAM dataset through a cloud-to-cloud registration process using the iterative closest point (ICP) algorithm. This step provided a seamless fusion of aerial and terrestrial LiDAR data into a single geospatial dataset, ensuring continuity in feature geometry and minimizing drift or mismatch between acquisition modes.
Importantly, error propagation was strictly controlled throughout the registration pipeline. Because all SLAM datasets were anchored to the same control framework via GNSS-determined ICPs, and because the alignment between terrestrial and aerial SLAM was based on rigid transformation without repeated re-projections, the overall spatial coherence was preserved. Drift and cumulative error, common concerns in SLAM-only workflows, were mitigated through this anchored, stepwise alignment strategy.
Finally, the same ICPs were reused as station points and back-sight references in the total station survey, which served as the primary accuracy benchmark in the Discussion section. A total of 105 building corner points measured with the total station were compared against SLAM-derived building outlines to assess final mapping accuracy. Because all datasets were independently tied to the same geodetic reference system via shared ground control, this enabled a reliable and unbiased validation of the end product without interdependent error transfer. This comprehensive alignment strategy ensured that each dataset maintained spatial integrity while supporting seamless fusion, contributing to a highly accurate and legally compliant cadastral mapping workflow. The careful integration of terrestrial and aerial SLAM, UAV RTK data, and total station validation, anchored to a unified national coordinate system, demonstrates a best-practice approach for data handling in modern cadastral surveying.
4. Discussion
The discussion chapter aims to critically assess the accuracy and effectiveness of the SLAM-based methodology employed in this study, positioning it within the broader context of existing research and technical advancements. The integration of SLAM technology in cadastral and topographic applications has gained increasing recognition due to its capacity for efficient data acquisition and real-time spatial mapping. However, the reliability of SLAM-extracted building geometries must be carefully evaluated against traditional survey methods to ensure compliance with cadastral and land administration requirements.
Recent studies cited earlier in the Introduction [
23,
24,
25,
26,
27,
28] provide a comparative backdrop that frames the methodological innovations and results presented in this work. These contributions from the international literature not only validate the increasing relevance of SLAM and UAV technologies in cadastral contexts, but also contextualize the accuracy benchmarks against which our own findings are assessed. Building on this foundation, the following analysis focuses on evaluating the positional accuracy and practical feasibility of our integrated workflow, using ground-truth data and performance metrics to substantiate its effectiveness in modern land administration.
These studies collectively demonstrate the advancements and limitations of SLAM technology in various applications, including cadastral mapping, construction, and indoor navigation. The findings provide a strong foundation for evaluating the accuracy of SLAM-derived datasets in this study, particularly in comparison to traditional surveying methodologies. The next section further investigates the accuracy of SLAM-based building extractions, comparing them against total station measurements through statistical analysis and visual assessment.
The present study focused on the integration of UAV and terrestrial LiDAR scanning to generate cadastral documentation with high spatial fidelity. To evaluate the positional accuracy of the extracted building geometries, a comparative analysis was conducted against total station (TS) measured corner points. The figure below illustrates the spatial relationships and statistical evaluations of these measurements (
Figure 8).
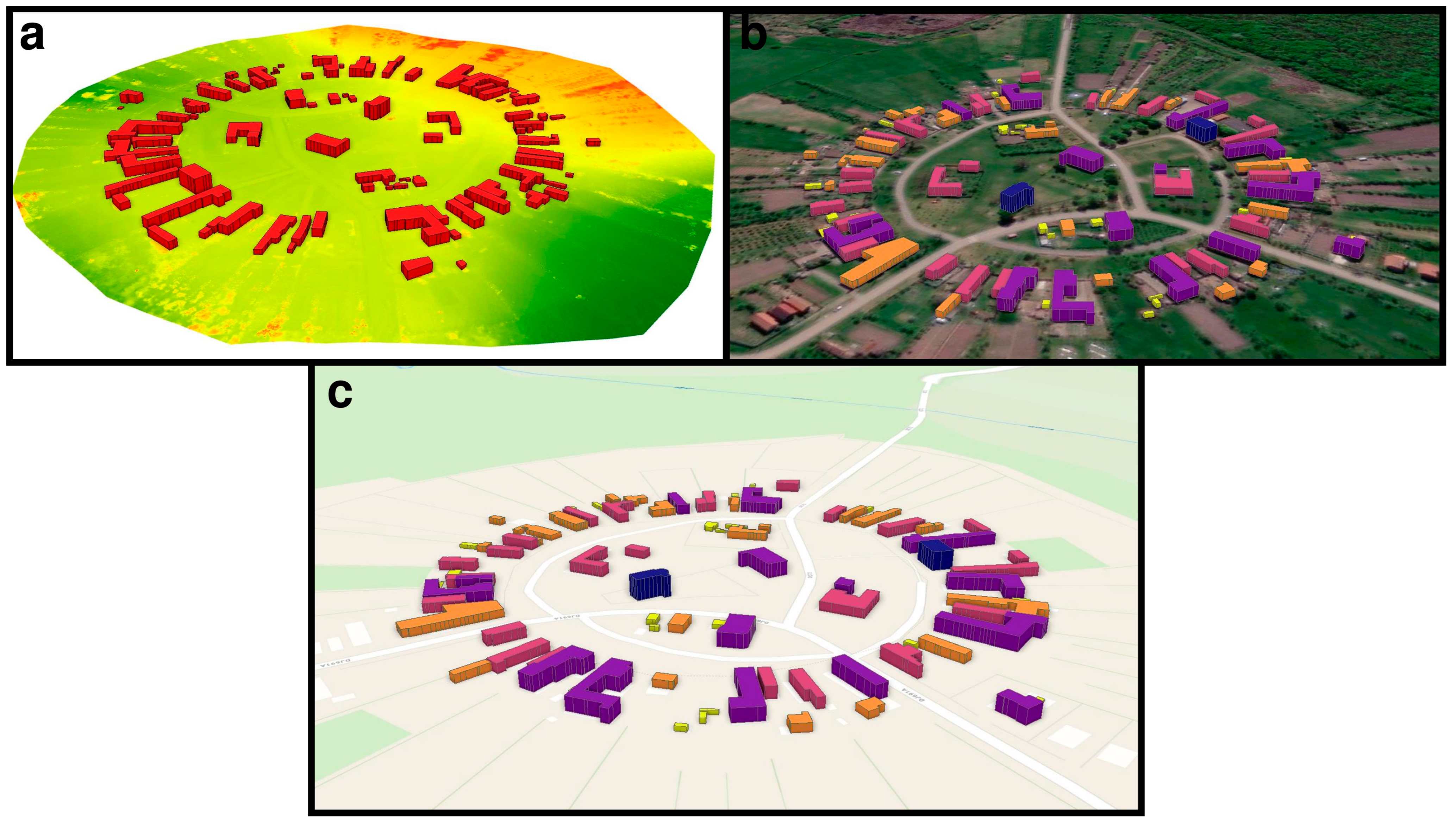
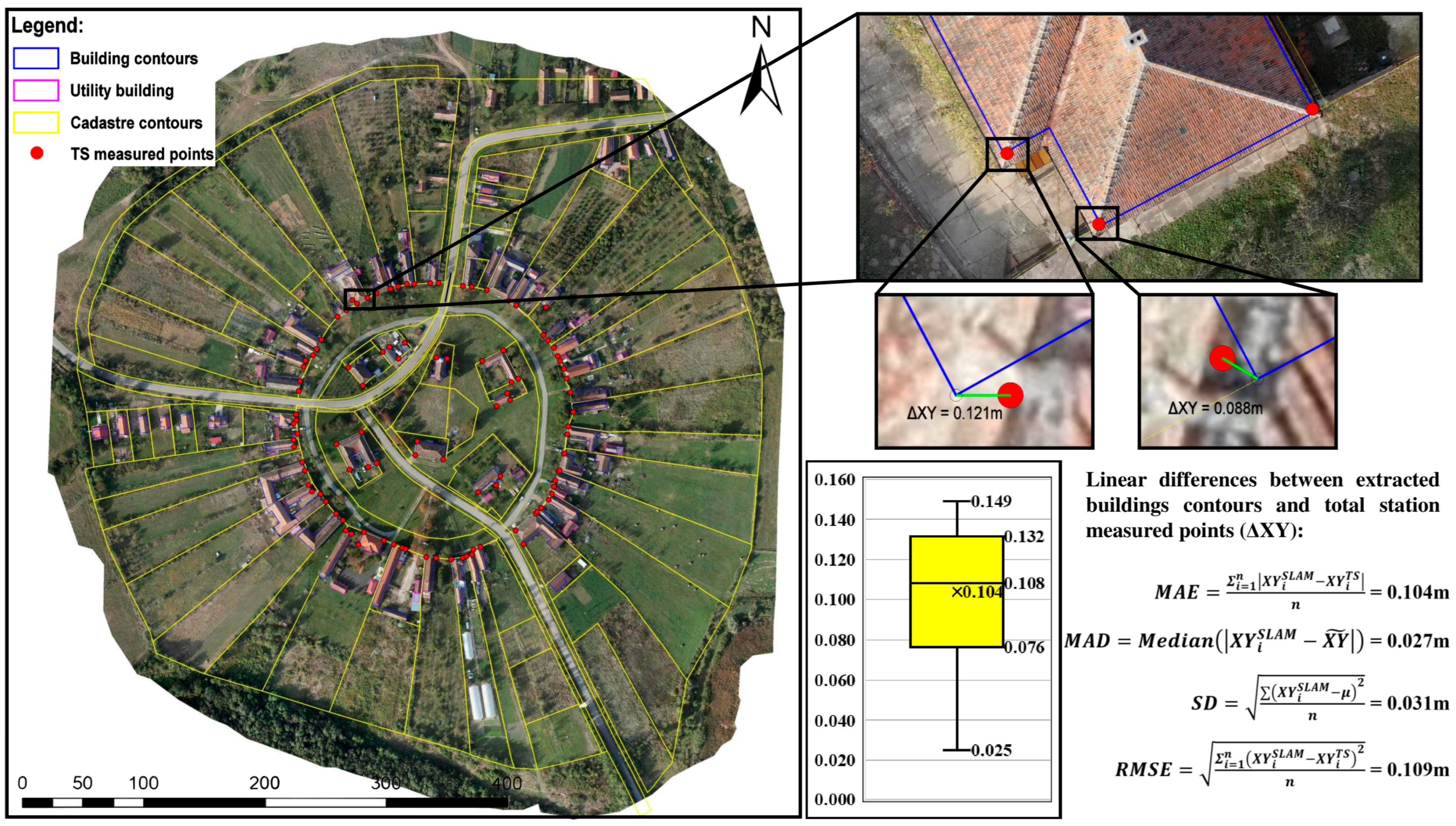
On the left side of the figure, an orthophoto of the Charlottenburg circular village is presented, overlaid with various spatial datasets. The building contours extracted from SLAM are represented in blue, while utility buildings are highlighted in magenta. The cadastral parcel boundaries, derived from cadastral records and refined through survey data, are delineated in yellow. The total station-measured points, serving as ground-truth reference data, are marked as red dots. These measured points represent 105 surveyed building corners, which were later compared to their corresponding SLAM-derived counterparts.
In the right portion of the figure, a series of medallion zoom-ins provide a detailed look at the comparative differences between the two datasets. The first zoomed-in section focuses on a specific building where the SLAM-derived building contour (blue) is displayed alongside three red total station points marking its actual surveyed corners. This visualization emphasizes the spatial alignment of SLAM-extracted contours with field measurements. Further zoom-ins highlight the direct linear discrepancies (ΔXY) between the extracted SLAM-based corners and the TS measured building corners. Two specific values are annotated, indicating coordinate differences of 0.121 m and 0.088 m, showcasing a relatively close match between the two datasets. These differences provide a direct quantification of spatial deviations, which are important for evaluating the suitability of SLAM for cadastral applications.
At the bottom right of the figure, a boxplot visually represents the distribution of linear discrepancies across the 105 measured points. The minimum observed deviation was 0.025 m, while the maximum reached 0.149 m, demonstrating some degree of variation in accuracy. The interquartile range indicates that most differences are clustered between 0.076 and 0.132 m, with the median value at 0.104 m.
To further quantify the accuracy of SLAM-extracted building contours, four statistical indicators were computed. The mean absolute error (MAE), which represents the average magnitude of absolute differences between SLAM and total station measurements, was 0.104 m, suggesting that on average, SLAM-extracted corners deviate by approximately 10 cm from the reference data. The median absolute deviation (MAD), a robust measure of variability within the dataset, was computed at 0.027 m, indicating that most deviations are relatively small. The standard deviation (SD) of 0.031 m highlights the overall spread of discrepancies, providing insight into the consistency of the dataset. Finally, the root mean square error (RMSE), which measures the mean squared differences between SLAM-derived and total station-measured coordinates, was found to be 0.109 m. RMSE is particularly useful for evaluating overall model performance, and in this case, the result demonstrates a relatively low error margin, confirming the suitability of SLAM for cadastral mapping applications.
The proposed methodology addresses significant technical challenges in cadastral surveying, particularly in environments where traditional instruments like total stations and GNSS receivers are limited by physical inaccessibility, urban obstructions, or regulatory constraints. By integrating UAV-based photogrammetry with both terrestrial and UAV-mounted SLAM technologies, we designed a flexible, mobile workflow capable of capturing comprehensive spatial data in a time-efficient and accurate manner. This approach allows for the documentation of parcel boundaries and building outlines even in confined, irregular, or visually obstructed environments, scenarios where conventional methods would require considerably more time and logistical effort.
The final cadastral products resulting from this workflow correspond to a level of detail 0 (LOD0) specification in line with international 3D cadastral standards. LOD0 refers to a 2.5D terrain model, where buildings are represented by their footprints projected onto the terrain surface, without vertical structural detail. However, due to the use of georeferenced SLAM-derived dense point clouds and UAV photogrammetry, our workflow can be readily extended to include building height information when needed. In this study, such vertical data extraction was technically possible and supported by the dataset, but was not pursued because Romanian cadastral regulations currently require only footprint-level documentation for legal property registration. Thus, while our implementation remains within LOD0, it represents a high-accuracy LOD0 output that exceeds the typical expectations of this category in terms of positional precision and spatial completeness.
Accuracy assessments confirm the robustness of our results. A comparative analysis between the extracted building contours and total station measured reference points yielded a RMSE of 0.109 m, a MAE of 0.104 m, and a SD of 0.031 m. These results fall well within cadastral tolerance limits and demonstrate that our methodology provides not only geometric correctness but also operational reliability for land administration purposes. The workflow is scalable, adaptable, and compliant with both national and international geospatial standards, offering a reliable pathway toward modern, efficient, and legally valid cadastral mapping.
While our study employed a combined backpack-mounted and UAV-mounted SLAM configuration supported by GNSS-determined ground control points, we acknowledge the potential value in exploring alternative configurations. In theory, using a backpack SLAM system alone could suffice for small, fully accessible settlements. However, in our case study, building occlusions and tight alleyways necessitated an aerial SLAM pass to supplement missing façade data. UAV-mounted SLAM proved advantageous in capturing otherwise obstructed geometry, especially in areas with dense vegetation or elevation variability. Conversely, had we relied solely on UAV-SLAM, ground-level features, especially building entrances and narrow side passages, would have been missed or poorly reconstructed.
Moreover, while ground control points (ICPs) measured via GNSS-RTK added setup time, they were important for multiple purposes, from assessing the photogrammetric outputs, to total station control points, and for consistent georeferencing between the terrestrial and aerial SLAM datasets. A “no-control-point” configuration relying purely on SLAM odometry could introduce drift or inconsistency, especially over long paths or in environments with repetitive geometry.
In terms of cost–benefit analysis, backpack-only SLAM is efficient for walkable terrain but less suitable when obstructions or terrain elevation limit visibility. UAV-SLAM, although more costly and logistically demanding, offers rapid and dense data collection over hard-to-access zones. For future implementations, adaptive workflows using site-specific conditions, such as terrain, accessibility, and regulatory constraints, could optimize both efficiency and accuracy.
Based on the results of this case study, the most economical and effective combination for cadastral data acquisition in constrained environments consists of the dual SLAM approach, first employed in a mobile configuration (e.g., backpack-mounted) to scan accessible street-level facades, followed by vertical UAV-mounted SLAM scanning to capture obstructed upper structures. This dual SLAM strategy, supported by a limited number of precisely measured GNSS control points, enables rapid deployment, minimal ground control placement, and comprehensive 3D data capture. The datasets were aligned through the SLAM-based algorithms and referenced in the national coordinate system, achieving a planimetric RMSE of approximately 0.109 m against total station-measured reference points. This configuration proved to be both cost-efficient, by reducing labor, equipment setup, and survey time, as well as accurate enough to meet Romanian cadastral standards. It offers a replicable model for practitioners seeking to streamline documentation workflows without compromising spatial quality.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}