

Multi-Component Remote Sensing for Mapping Buried Water Pipelines

 ,
,
Abstract

1. Introduction
2. Materials and Methods
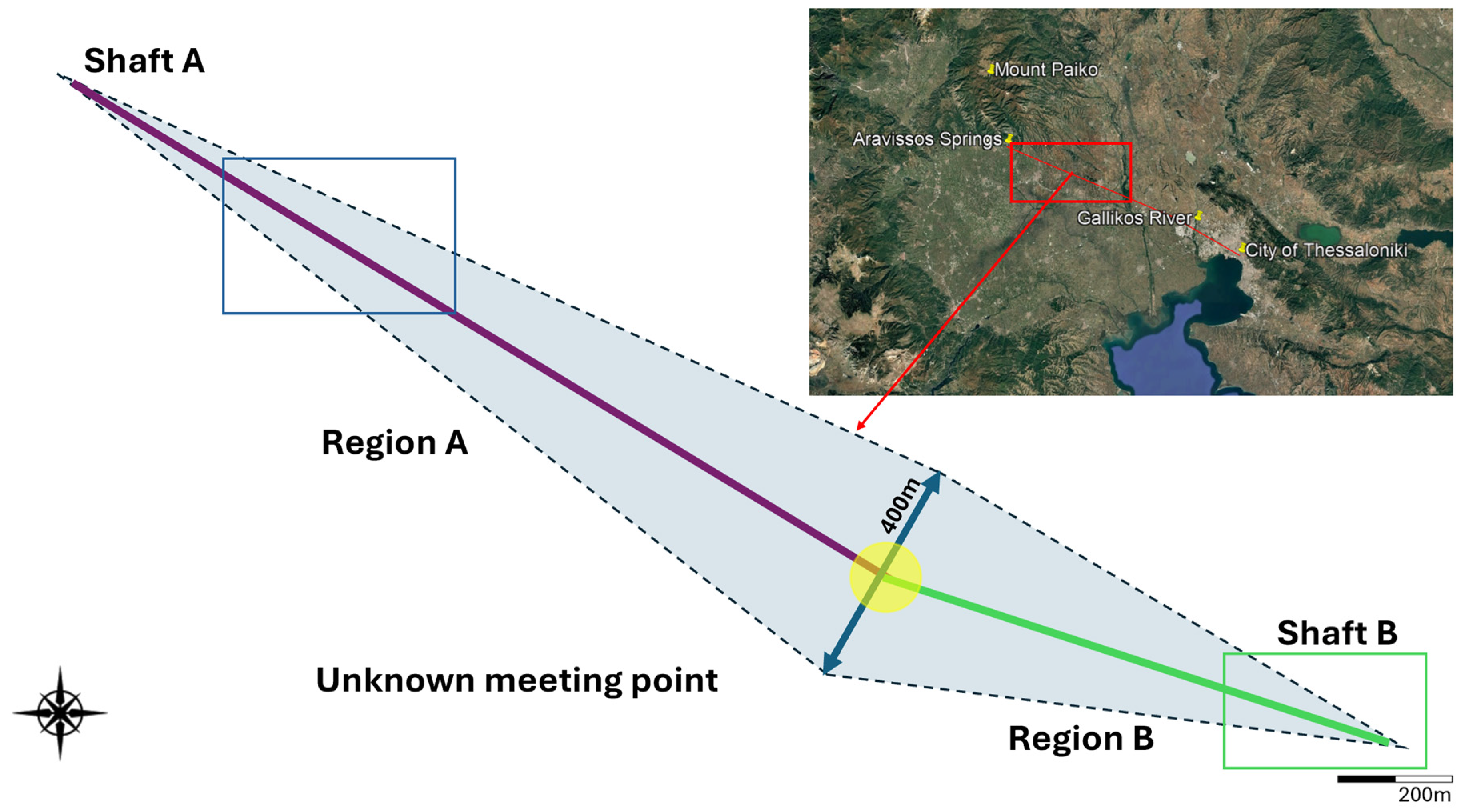
2.1. Description of Study Area and Use Case
2.2. NIR Aerial Survey Campaigns
2.3. Sentinel-2 Data
2.4. Google Earth
2.5. Data Analysis and Error Evaluation
- Escatter quantifies the spatial dispersion of traced features and reflects natural variability in surface expression width and continuity;
- Egeo represents platform-specific horizontal geolocation accuracy derived from technical specifications (RTK GNSS for UAV: ±0.03 m; Sentinel-2 metadata: ±12.5 m; and Google Earth georeferencing: estimated ±0.5 m based on ground control point residuals);
- Edig captures operator variability through triplicate digitization analysis.
3. Results
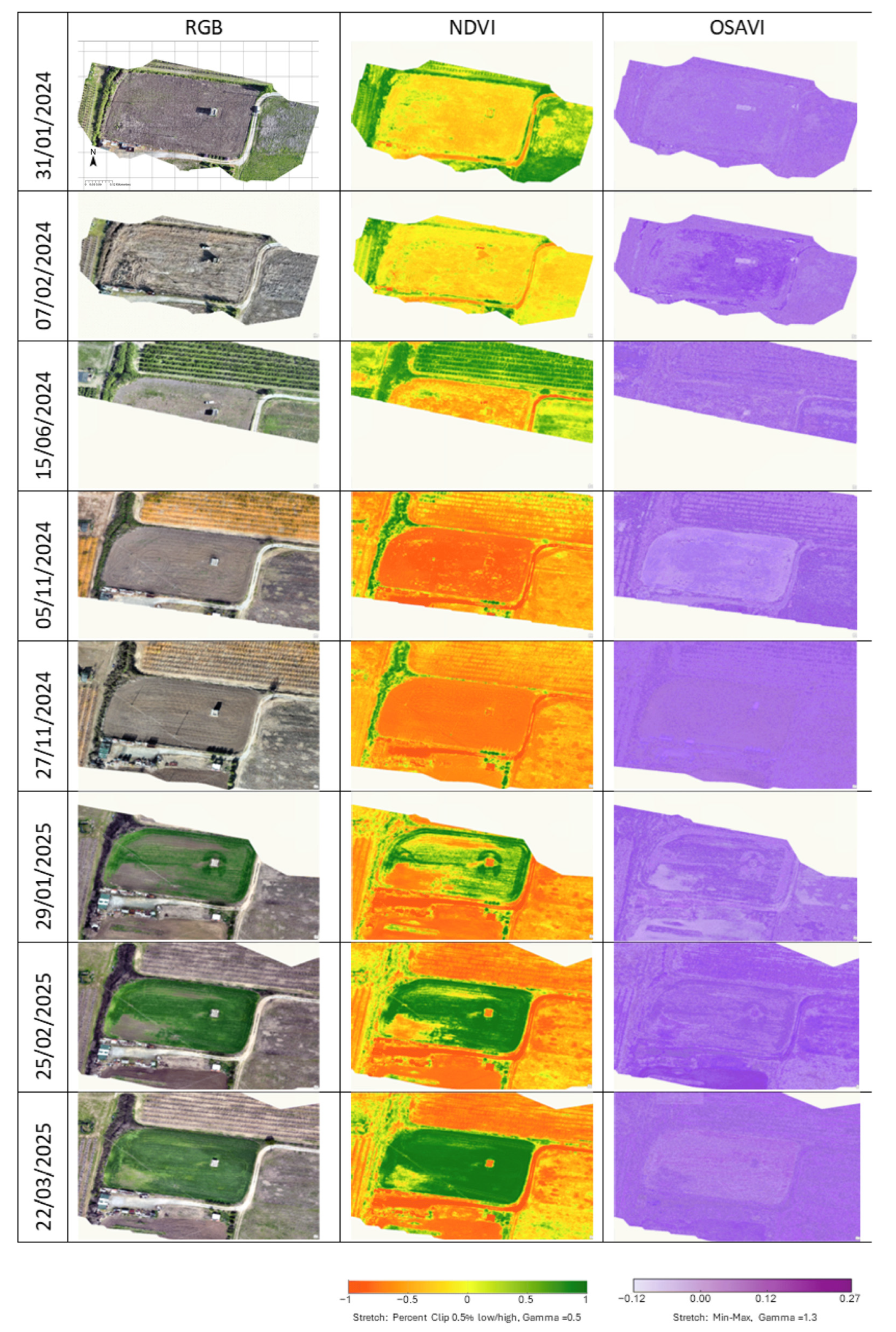
3.1. Data Acquisition from UAVs
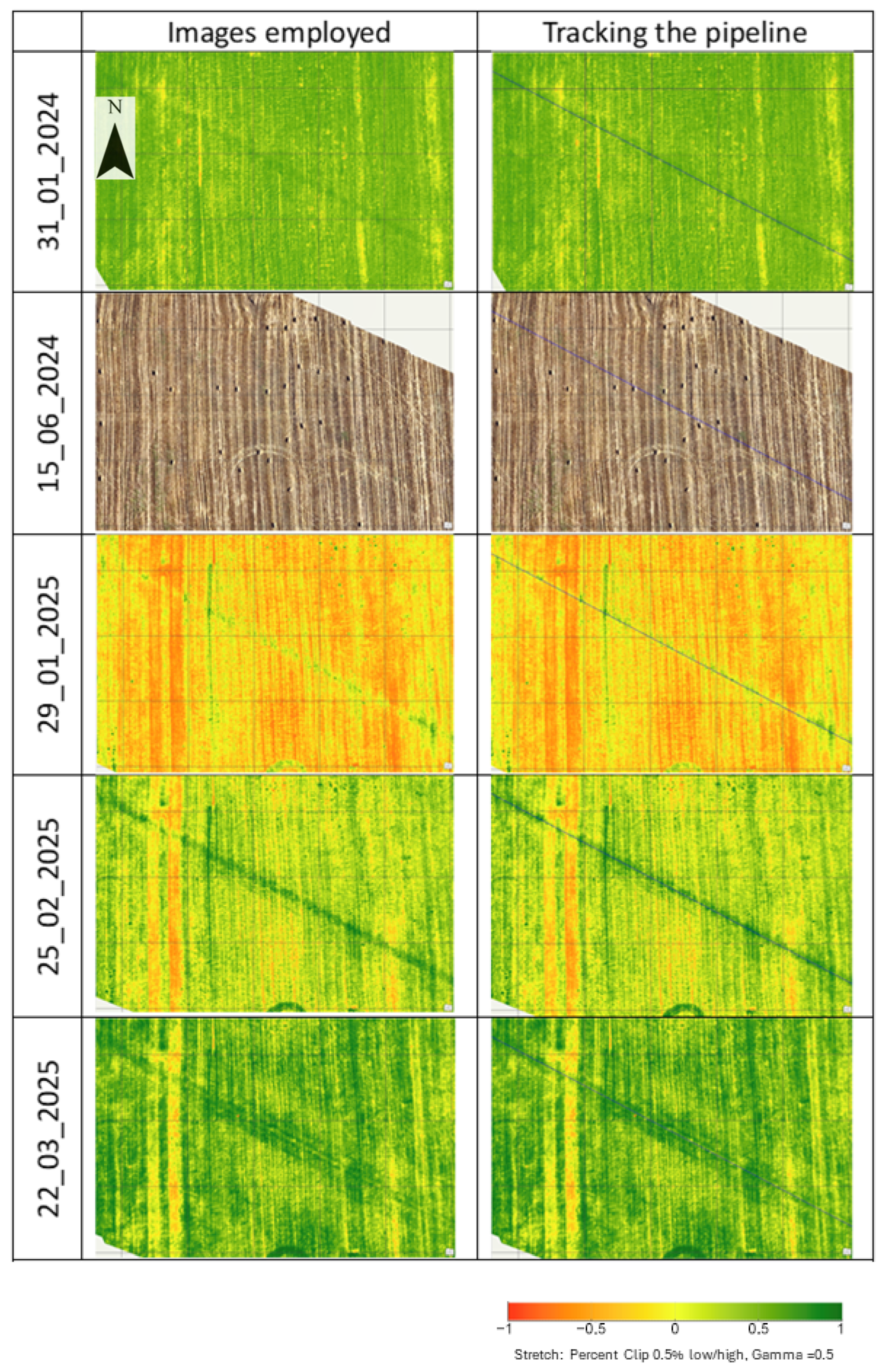
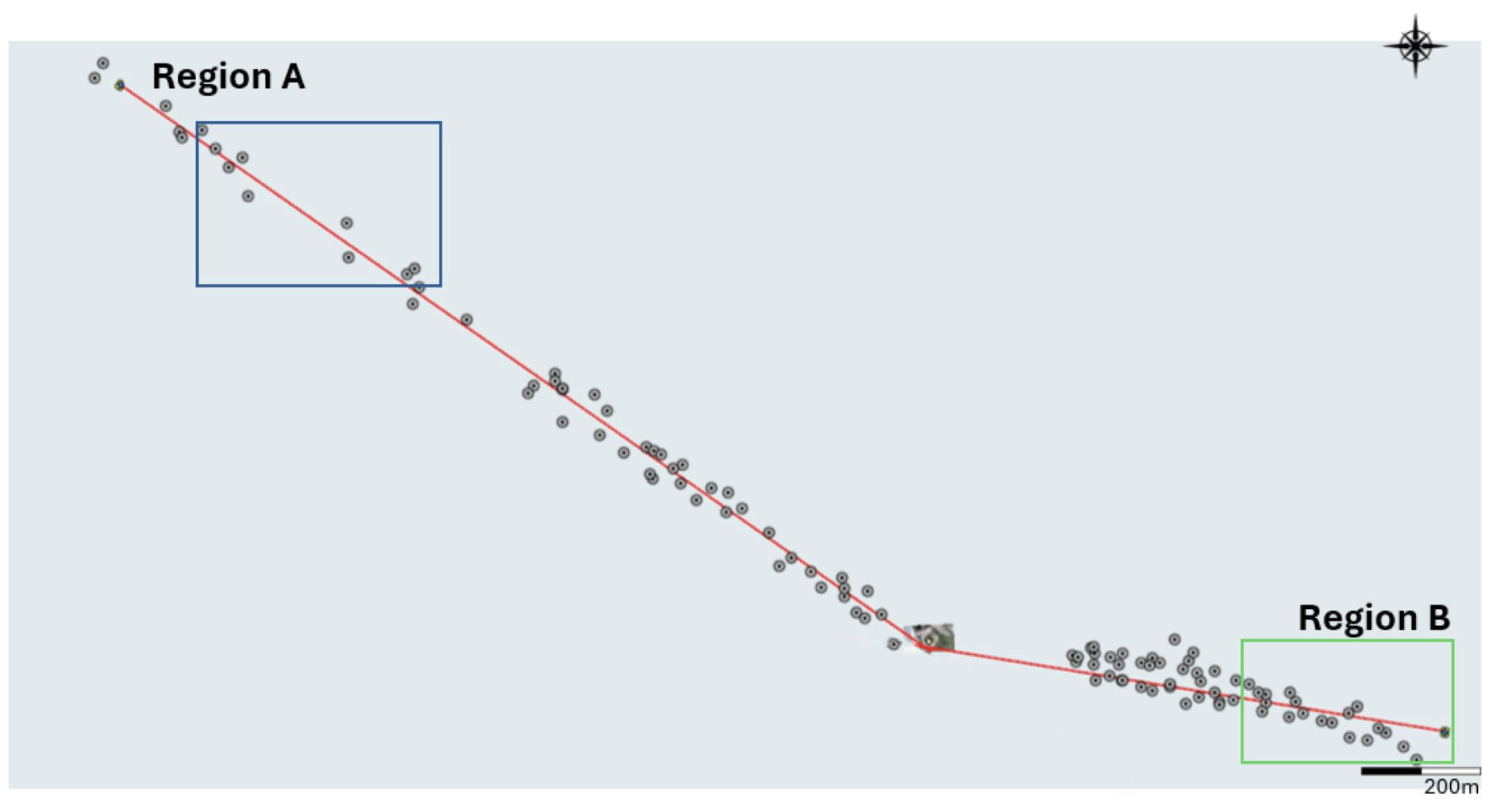
3.1.1. Identifying the Pipeline Traces with UAVs
3.1.2. Marking the Traces with UAVs
3.2. Data Acquisition from Sentinel-2
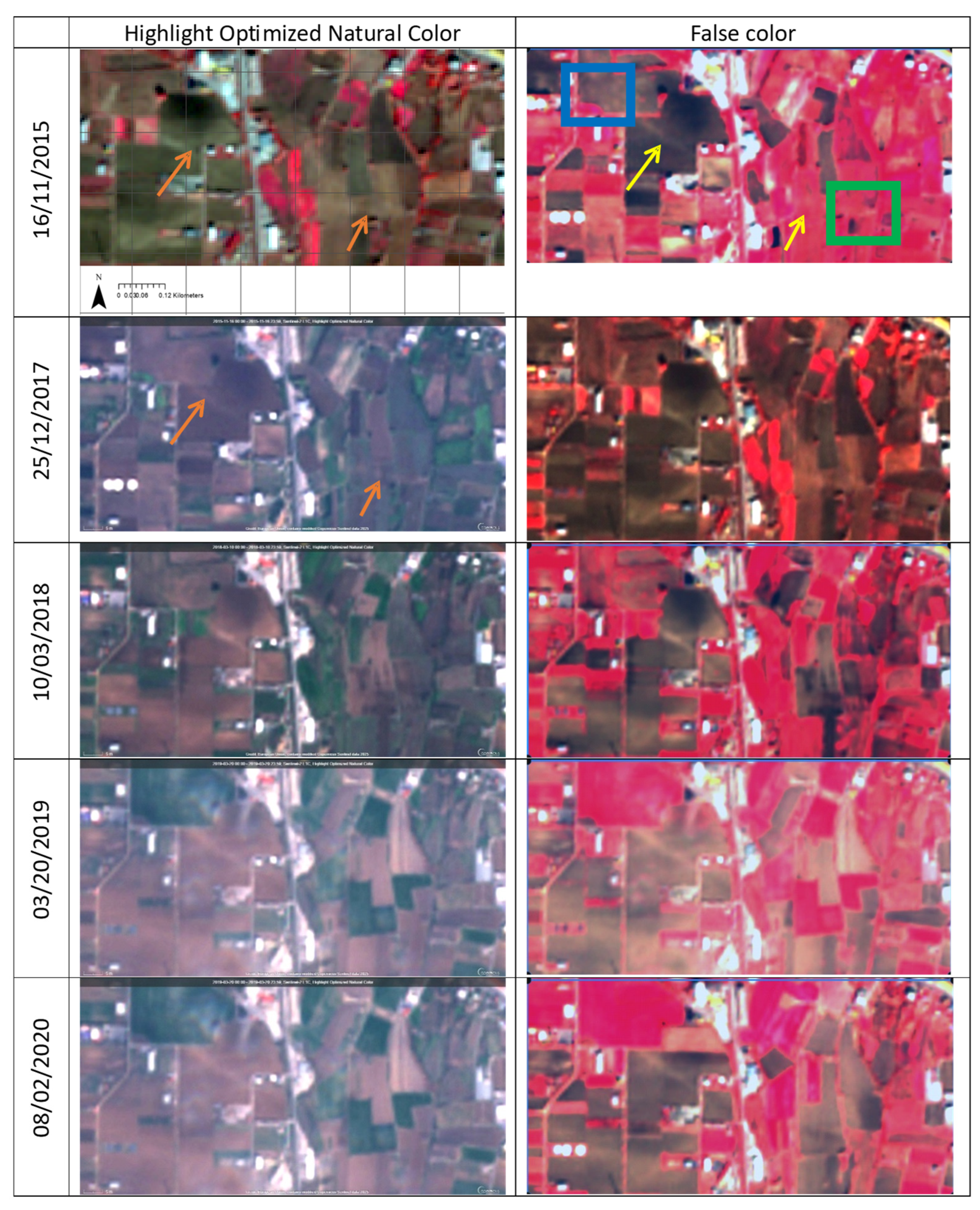
3.2.1. Identifying Pipeline Traces with Sentinel-2
- In the 16 November 2015 scene, the unplanted field appears uniformly brown in true color, yet the orange arrows draw attention to two nearly imperceptible pale lines cutting diagonally through the field—one downslope of shaft A, the other just southwest of shaft B. The false-color composite renders these same features as narrow, cool-tone streaks, with the yellow arrows, indicating reduced NIR reflectance.
- By 25 December 2017, orange arrows still trace a faint linear pattern near shaft A. In the NIR composite, this trench line persists as a delicate low-NIR band (yellow arrow), whereas shaft B shows a coherent pale anomaly.
- The 10 March 2018 acquisition captures early spring green-up, and the true-color image’s orange-arrowed alignment is now masked by emerging vegetation. Likewise, the false-color panel—highlighted by yellow arrows—displays a continuous linear feature.
- On 20 March 2019, satellite images again reveal soil tone variations. Here, an orange arrow in the true-color composite marks a pale line southeast of shaft A, while the false-color image accentuates this band (yellow arrow) as a distinct low-NIR track, whereas near shaft B, the trace is not observable.
- Finally, the 8 February 2020 scene shows both orange and yellow arrows which indicate where the pipeline alignment would lie.
3.2.2. Marking the Traces
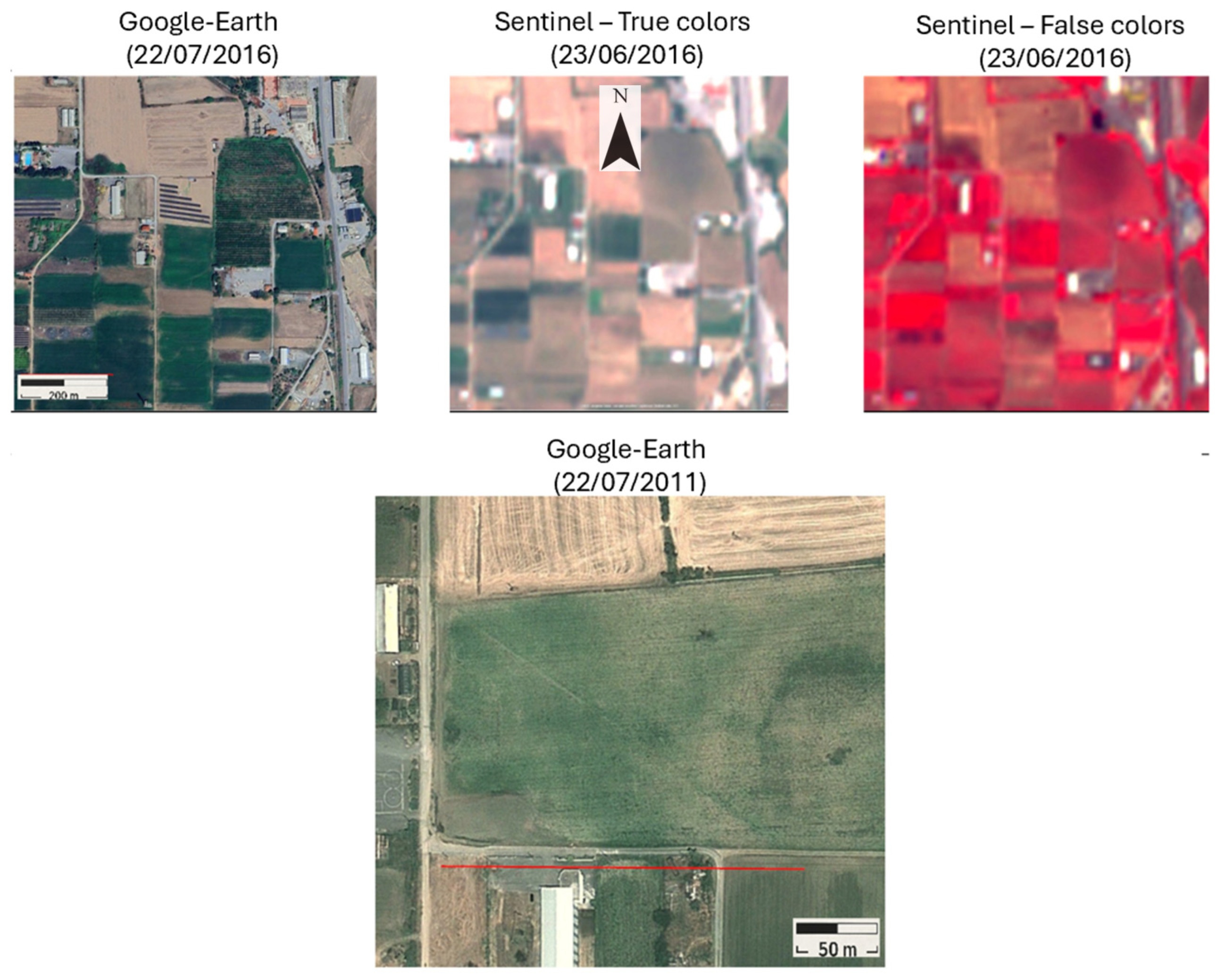
3.3. Data Acquisition from Google Earth
4. Discussion
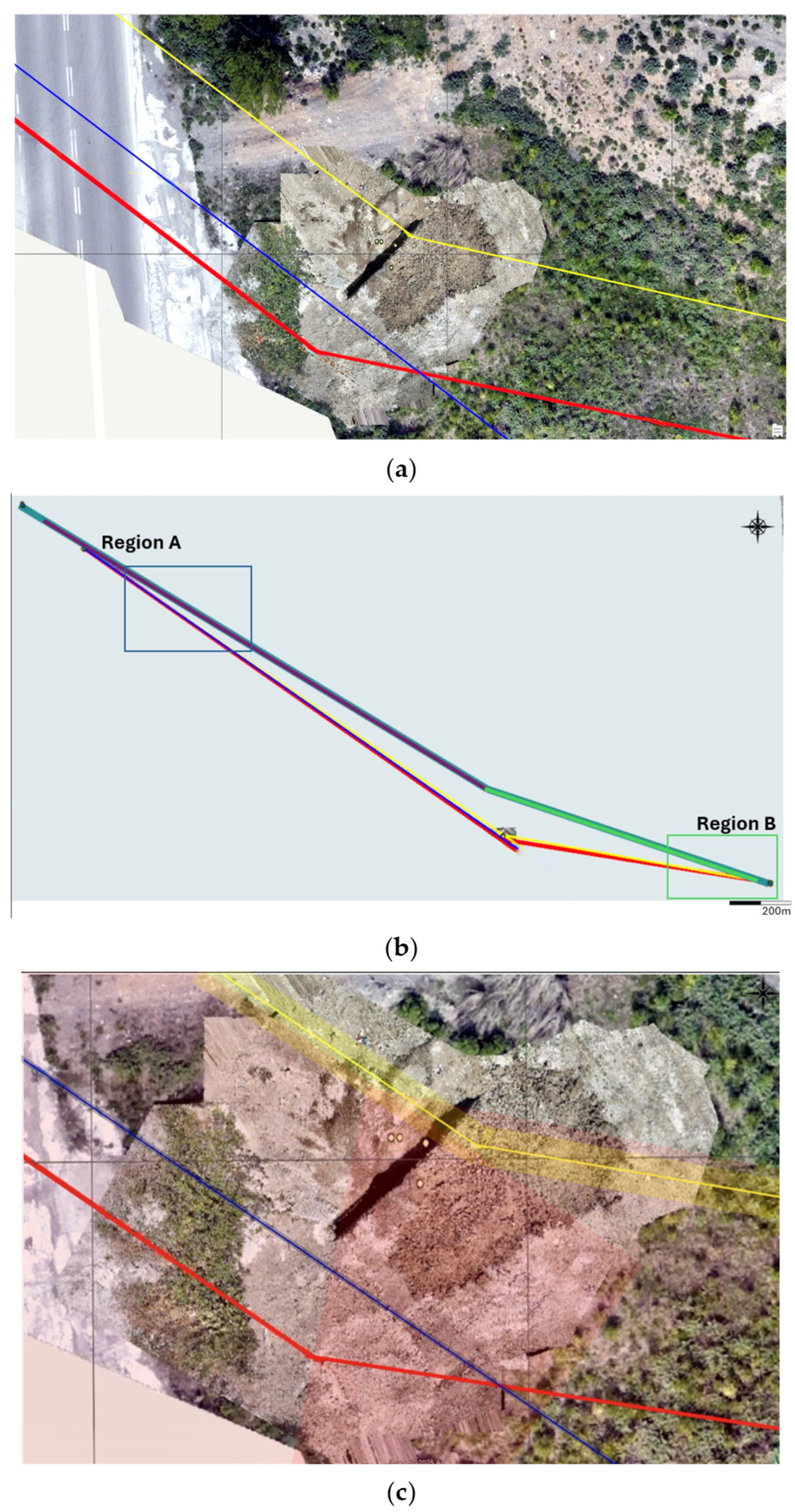
4.1. Comparative Analysis of Pipeline Alignments and Efficacy of Remote Sensing
4.2. Excavation Strategy, Validation, and Operational Implications
4.3. Methodological Limitations
- The UAV-NIR (NDVI/OSAVI) method: Despite its high potential accuracy, this method demonstrated variable reliability. Its efficacy is highly sensitive to surface conditions (soil type, moisture, and vegetation characteristics). Beyond detection-related constraints, UAV surveys face significant operational limitations. Individual flights cover only 10–50 hectares, requiring multiple missions for extended pipeline networks with associated cost increases. Meteorological conditions severely restrict acquisition windows, as wind speeds exceeding 12–14 m/s, precipitation, or fog prevent operations, potentially eliminating entire optimal phenological periods. Battery constraints, limiting flight durations to 20–35 min, necessitate frequent interruptions.
- Google Earth imagery: The archival imagery in Google Earth, while invaluable, often has irregular and sometimes sparse temporal resolutions, particularly for specific rural locations. This makes it less reliable for systematic, continuous monitoring programs and more of an opportunistic data source when clear imagery coincides with optimal ground conditions. Successful detection is contingent upon favorable environmental conditions (e.g., minimal vegetation cover and optimal soil moisture to enhance discoloration), coinciding with the dates of image acquisition.
- Sentinel-2 multispectral data: Sentinel-2 provides valuable high temporal resolution (ca. 5-day revisit cycle), rendering its soil discoloration signal potentially useful for near real-time pipeline localization and monitoring of soil–pipe interactions. However, its utility is constrained by its comparatively low spatial resolution, resulting in a substantial positional uncertainty (±13.0 m).
- Site-specific validation constraints: The comprehensive validation of all predicted features, particularly complex ones, like pipeline junctions, may be impeded by practical on-the-ground limitations, such as the presence of existing infrastructure (e.g., roads) or restricted access, as encountered in this study.
- Temporal repeatability considerations: While this study successfully demonstrated the comparative accuracy of UAV (±0.3 m), Google Earth (±1 m), and Sentinel-2 (±13 m) data sources for pipeline detection, we acknowledge that a statistical analysis of data repeatability across seasons was not performed. Such an analysis would require extensive multi-temporal datasets collected across equivalent seasonal periods over multiple years.
4.4. Proposed Workflow
- UAV-NIR Surveys: These provide the highest positional accuracy (±0.3 m, 1σ), pinpointing the pipeline via narrow vegetation stress anomalies. However, detection is contingent on specific phenological windows (e.g., post-sowing and early green-up), necessitating carefully timed acquisitions coordinated with local agricultural cycles.
- Sentinel-2 Imagery: This enables consistent, corridor-scale detection (±13.0 m, 1σ) through the identification of broader soil discoloration bands associated with long-term subsurface disturbance. Its high temporal frequency and wide-area coverage make it invaluable for initial screening and monitoring, despite its coarser spatial resolution.
- Google Earth Historical Imagery: This serves as a crucial bridge, offering meter-scale accuracy (≈±1 m, 1σ) for identifying both soil marks (comparable to Sentinel-2) and, opportunistically, finer vegetation patterns (approaching the detail of UAVs) when suitable archival imagery coincides with favorable ground conditions.
- Initial Screening: Utilize a multi-temporal Sentinel-2 analysis (focusing on post-harvest and late-winter/early-spring scenes) to identify persistent pale-soil anomalies and delineate candidate pipeline corridors.
- Refinement: Consult historical high-resolution archives (like Google Earth) to refine the potential axis, leveraging images captured during periods of low vegetation cover.
- Precision Mapping: Deploy targeted UAV-NIR surveys during phenologically optimal windows to achieve centimeter-level centerline mapping immediately prior to excavation, maintenance, or repair activities.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ATM | Airborne Thematic Mapper |
| CASI | Compact Airborne Spectrographic Imager |
| DSM | Digital surface model |
| EGSA 1987 | Hellenic Geodetic Reference System 1987 |
| EPSG | European Petroleum Survey Group |
| EVI | Enhanced Vegetation Index |
| FLIR | Forward-Looking Infrared |
| GIS | Geographic information system |
| GNSS | Global Navigation Satellite System |
| GPR | Ground-penetrating radar |
| KML | Keyhole Markup Language |
| L1A | Level-1A (Sentinel-2 Product Level) |
| LiDAR | Light Detection and Ranging |
| MSI | Multispectral Instrument |
| NDVI | Normalized Difference Vegetation Index |
| NIR | Near infrared |
| OSAVI | Optimized Soil-Adjusted Vegetation Index |
| PCA | Principal Component Analysis |
| RGB | Red, green, blue |
| RMSE | Root-mean-square error |
| RTK | Real-Time Kinematic |
| S-2A | Sentinel-2A |
| SR | Simple Ratio (Vegetation Index) |
| SWIR | Short-Wave Infrared |
| TOA | Top-Of-Atmosphere |
| UAV | Unmanned aerial vehicle |
| VNIR | Visible and Near Infrared |
| WI | Water Index |
References
- Chatelard, C.; Krapez, J.-C.; Barillot, P.; Déliot, P.; Frédéric, Y.-M.; Pierre, J.; Nouvel, J.-F.; Hélias, F.; Louvet, Y.; Legoff, I.; et al. Multispectral approach assessment for detection of losses in water-transmission systems by airborne remote sensing. In Proceedings of the 13th International Conference on Hydroinformatics 2018, Palermo, Italy, 1–6 July 2018. [Google Scholar] [CrossRef]
- Hadjimitsis, D.G.; Agapiou, A.; Themistocleous, K.; Alexakis, D.D.; Toulios, G.; Perdikou, S.; Sarris, A.; Toulios, L.; Clayton, C. Detection of water pipes and leakages in rural water-supply networks using remote-sensing techniques. In Remote Sensing: Advanced Techniques and Platforms; Hadjimitsis, D.G., Ed.; InTech: Rijeka, Croatia, 2013; Chapter 6. [Google Scholar]
- Papadakis, M. Use of Satellite Remote Sensing for Detecting Archaeological Features: An Example from Ancient Corinth, Greece. Master’s Thesis, Lund University, Lund, Sweden, 2023. [Google Scholar]
- Agapiou, A.; Lysandrou, V. Remote-sensing archaeology: Tracking and mapping evolution in European scientific literature 1999–2015. J. Archaeol. Sci. Rep. 2015, 4, 192–200. [Google Scholar] [CrossRef]
- Cerra, D.; Agapiou, A.; Cavalli, R.M.; Sarris, A. An objective assessment of hyperspectral indicators for the detection of buried archaeological relics. Remote Sens. 2018, 10, 500. [Google Scholar] [CrossRef]
- Liu, S.; Liu, H.; Liu, P.; Zhao, L.; Ma, C. A review of multi-sensor data fusion for pipeline monitoring. Process Saf. Environ. Prot. 2022, 165, 835–852. [Google Scholar]
- van der Werff, H.M.A.; van der Meijde, M.; Jansma, F.; Van der Meer, F.; Groothuis, G.J. A Spatial-Spectral Approach for Visualization of Vegetation Stress Resulting from Pipeline Leakage. Sensors 2008, 8, 3733–3743. [Google Scholar] [CrossRef]
- Agapiou, A.; Alexakis, D.D.; Themistocleous, K.; Hadjimitsis, D.G. Water-leakage detection using remote sensing, field spectroscopy and GIS in semiarid Cyprus. Urban Water J. 2014, 11, 573–583. [Google Scholar] [CrossRef]
- Ng-Cutipa, W.L.; Lobato, A.; González, F.J.; Georgalas, G.P.; Zananiri, I.; Carvalho, M.; Cardoso-Fernandes, J.; Somoza, L.; Piña, R.; Lunar, R.; et al. Spectral angle mapper application using Sentinel-2 in coastal placer deposits in Vigo Estuary, Northwest Spain. Remote Sens. 2025, 17, 1824. [Google Scholar] [CrossRef]
- Durlević, U.; Srejić, T.; Valjarević, A.; Aleksova, B.; Deđanski, V.; Vujović, F.; Lukić, T. GIS-based spatial modeling of soil erosion and wildfire susceptibility using VIIRS and Sentinel-2 data: A case study of Šar Mountains National Park, Serbia. Forests 2025, 16, 484. [Google Scholar] [CrossRef]
- Pascucci, S.; Cavalli, R.M.; Palombo, A.; Pignatti, S. Suitability of CASI and ATM airborne data for archaeological subsurface detection. J. Geophys. Eng. 2010, 7, 183–189. [Google Scholar] [CrossRef]
- Donati, J.C.; Sarris, A. Evidence for two planned Greek settlements in the Peloponnese from satellite remote sensing. Am. J. Archaeol. 2016, 120, 361–398. [Google Scholar] [CrossRef]
- Abate, N.; Elfadaly, A.; Masini, N.; Lasaponara, R. Multitemporal 2016–2018 Sentinel-2 data enhancement for landscape archaeology: The case study of Foggia Province, Southern Italy. Remote Sens. 2020, 12, 1309. [Google Scholar] [CrossRef]
- Materazzi, F.; Pacifici, M. Archaeological crop-mark detection through drone multispectral remote sensing: The case of Veii. J. Archaeol. Sci. Rep. 2022, 41, 103235. [Google Scholar]
- Kalaycı, T.; Lasaponara, R.; Wainwright, J.; Masini, N. Multispectral contrast of archaeological features: A quantitative evaluation. Remote Sens. 2019, 11, 913. [Google Scholar] [CrossRef]
- Negula, D.; Moise, C.; Lazăr, M.A.; Rișcuța, C.N.; Cristescu, C.; Dedulescu, A.L.; Mihalache, C.E.; Badea, A. Satellite remote sensing for analysis of the Micia and Germisara sites. Remote Sens. 2020, 12, 2003. [Google Scholar] [CrossRef]
- El-Behaedi, R. Detection and 3-D modelling of potential buried archaeological structures using WorldView-3 imagery. Remote Sens. 2022, 14, 92. [Google Scholar] [CrossRef]
- Krapez, J.-C.; Sanchis Muñoz, J.; Mazel, C.; Chatelard, C.; Déliot, P.; Frédéric, Y.-M.; Barillot, P.; Hélias, F.; Barba Polo, J.; Olichon, V.; et al. Multispectral Optical Remote Sensing for Water-Leak Detection. Sensors 2022, 21, 1057. [Google Scholar] [CrossRef]
- Koganti, T.; Ghane, E.; Martinez, L.R.; Iversen, B.V.; Allred, B.J. Mapping agricultural subsurface drainage systems using UAV imagery and ground-penetrating radar. Sensors 2021, 21, 2800. [Google Scholar] [CrossRef]
- Voysey, D.; Campbell, G. Assessing the detectability of underground water-pipe leaks with non-invasive technologies. Proc. Assoc. Public Auth. Surv. Conf. 2023, 26, 79–86. [Google Scholar]
- Agudo, P.U.; Pajas, J.A.; Pérez-Cabello, F.; Redón, J.V.; Ezquerra Lebrón, B. The potential of drones and sensors to enhance detection of archaeological crop marks: A comparative study. Drones 2018, 2, 29. [Google Scholar] [CrossRef]
- Kaimaris, D.; Tsokas, D. Application of UAS with remote-sensing sensors for locating marks in the archaeological site of Europos, Greece. Remote Sens. 2023, 15, 3843. [Google Scholar] [CrossRef]
- Ciccone, G. Investigating archaeological remains at Stracciacappe (Rome): Comparing UAV multispectral, thermal and micro-topographic data. Drone Syst. Appl. 2024, 12, 1–16. [Google Scholar] [CrossRef]
- Dongen, A.; Eeckhout, P.; Lo Buglio, D. Crossed experimentations of low-altitude surveys for detecting buried structures. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2022, 46, 505–512. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, J.; Zhang, Y.; Wang, Q.; Liu, Z. Pipeline leakage detection using multi-source remote sensing data fusion and machine learning. Remote Sens. 2023, 15, 1391. [Google Scholar] [CrossRef]
- Tian, T. Localization and Mapping Through Multi-Sensor Fusion for Pipe Inspection: From Theory to Deployment. Master’s Thesis, Tech. Report, CMU-RI-TR-25-17. Carnegie Mellon University, Pittsburgh, PA, USA, 2025. [Google Scholar]
- Wang, K.; Li, P.; Sun, G.; Zhao, Z.; Luo, W. An accurate localization method for underground pipeline leakage points in chemical parks based on ultrasonic creep wave flaw detection and data integration. Acta Acust. 2024, 8, 69. [Google Scholar] [CrossRef]
- Priyanka, E.; Thangavel, S. Multi-type feature extraction and classification of leakage in oil pipeline network using digital twin technology. J. Ambient. Intell. Humaniz. Comput. 2022, 13, 5885–5901. [Google Scholar] [CrossRef]
- Dadrass Javan, F.; Samadzadegan, F.; Pourazar, S.; Fazeli, H. A critical review on multi-sensor and multi-platform remote sensing data fusion approaches: Current status and prospects. Int. J. Remote Sens. 2024, 45, 1327–1402. [Google Scholar]
- Calleja, J.F.; Requejo Pagés, O.; Díaz-Álvarez, N.; Peón, J.; Gutiérrez, N.; Martín-Hernández, E.; Relea, A.C.; Melendi, D.R.; Álvarez, P.F. Detection of buried archaeological remains with combined satellite multispectral and UAV data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 555–573. [Google Scholar] [CrossRef]
- Melillos, G.; Themistocleous, K.; Papadavid, G.; Agapiou, A.; Prodromou, M.; Michaelides, S.; Hadjimitsis, D.G.; Papadavid, G. Integrated use of field spectroscopy and satellite remote sensing for defence and security applications in Cyprus. In Fourth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2016); International Society for Optics and Photonics: Paphos, Cyprus, 2016; Volume 9688, p. 96880F. [Google Scholar] [CrossRef]
- Themistocleous, K. The use of UAV platforms for remote-sensing applications: Case studies in Cyprus. Proc. Int. Conf. Remote Sens. Geoinf. Environ. 2015, 9229, S1–S8. [Google Scholar]
- Directive (EU) 2022/2557 of the European Parliament and of the Council of 14 December 2022 on the Resilience of Critical Entities and Repealing Council Directive 2008/114/EC; Official Journal of the European Union: Brussels, Belgium, 2022.
- Law 5054/2023; Ratification of the Additional Protocol to the Convention on the Contract for the International Carriage of Goods by Road (CMR) Concerning the Electronic Consignment Note. Government Gazette of the Hellenic Republic: Athens, Greece, 2023.
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- ESA. Sentinel-2 Product Specification, Issue 14.9; European Space Agency: Paris, France, 2018. [Google Scholar]
- White, D.C.; Williams, M.; Barr, S.L. Detecting sub-surface soil disturbance using hyperspectral first-derivative ratios of associated vegetation stress. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2008, 37, 243–248. [Google Scholar]
- Merola, P.; Allegrini, A.; Guglietta, D.; Sampieri, S. Study of buried archaeological sites using vegetation indices. Proc. SPIE Remote Sens. Environ. Monit. GIS Geol. VI 2006, 6366, 64–75. [Google Scholar]
- Ma, P.; Zhuo, Y.; Chen, G.; Burken, J.G. Natural gas induced vegetation stress identification and discrimination from hyperspectral imaging for pipeline leakage detection. Remote Sens. 2024, 16, 1029. [Google Scholar] [CrossRef]
- Brehm, T. Evaluating the Effects of Underground Pipeline Installation on Soil and Crop Characteristics Throughout Ohio, USA. Master’s Thesis, Ohio State University, Columbus, OH, USA, 2022. [Google Scholar]
- Gojda, M. Air Survey and Remote Sensing in Archaeology; Wydawnictwo Naukowe Uniwersytetu Kardynała Stefana Wyszyńskiego: Warszawa, Poland, 2020. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Spatial Resolution | Spectral Bands | Temporal Coverage | Key Products | Positional Accuracy |
|---|---|---|---|---|---|
| UAV (DJI Mavic 3 NIR) | 5 cm | G (560 ± 16 nm), R (650 ± 16 nm), RE (730 ± 16 nm), and NIR (860 ± 26 nm) | 8 campaigns (Jan 2024–Mar 2025) | NDVI and OSAVI | ±0.30 m |
| Sentinel-2 | 10 m (VNIR), 20 m (RE/SWIR), and 60 m (atmospheric) | 13 bands (440–2200 nm) | 221 scenes (2015–2020) | Soil discoloration maps and false-color composites | ±13.0 m |
| Google Earth | ~0.5 m | RGB (visible spectrum) | 3 dates (2002 and 2011) | Orthophotos and soil/vegetation marks | ±1.0 m |
| Traditional methods, GPR * | <1 m lateral | N/A | N/A | Depth profiles | ±0.1–0.5 m |
| Legacy maps | N/A | N/A | 1975–1978 | Pipeline routes | Up to 300 m error |
| Method | Escatter (m) | Egeo (m) | Edig (m) | Etotal (m) | Dominant Error Source (%) |
|---|---|---|---|---|---|
| UAV-NIR | 0.29 | 0.03 | 0.05 | ±0.30 | Scatter |
| Sentinel-2 | 4.5 | 12.5 | 2.0 | ±13.0 | Geolocation |
| Google Earth | ~0.8 * | ~0.5 * | ~0.3 * | ±1.0 | Scatter |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lioumbas, J.; Spahos, T.; Christodoulou, A.; Mitzias, I.; Stournara, P.; Kavouras, I.; Mentes, A.; Theodoridou, N.; Papadopoulos, A. Multi-Component Remote Sensing for Mapping Buried Water Pipelines. Remote Sens. 2025, 17, 2109. https://doi.org/10.3390/rs17122109
Lioumbas J, Spahos T, Christodoulou A, Mitzias I, Stournara P, Kavouras I, Mentes A, Theodoridou N, Papadopoulos A. Multi-Component Remote Sensing for Mapping Buried Water Pipelines. Remote Sensing. 2025; 17(12):2109. https://doi.org/10.3390/rs17122109
Chicago/Turabian StyleLioumbas, John, Thomas Spahos, Aikaterini Christodoulou, Ioannis Mitzias, Panagiota Stournara, Ioannis Kavouras, Alexandros Mentes, Nopi Theodoridou, and Agis Papadopoulos. 2025. "Multi-Component Remote Sensing for Mapping Buried Water Pipelines" Remote Sensing 17, no. 12: 2109. https://doi.org/10.3390/rs17122109
APA StyleLioumbas, J., Spahos, T., Christodoulou, A., Mitzias, I., Stournara, P., Kavouras, I., Mentes, A., Theodoridou, N., & Papadopoulos, A. (2025). Multi-Component Remote Sensing for Mapping Buried Water Pipelines. Remote Sensing, 17(12), 2109. https://doi.org/10.3390/rs17122109