
GPS and Galileo Precise Point Positioning Performance with Tropospheric Estimation Using Different Products: BRDM, RTS, HAS, and MGEX


Abstract
1. Introduction
2. Methodology and Data
- G, E denote the GPS and Galileo systems, respectively;
- and are ionosphere-free linear combination for code and carrier-phase observations, respectively [m];
- is the true geometric range between the satellite in the emission time and the receiver in the reception time [m];
- c is the speed of light [m/s];
- , represent the receiver clock offsets in the GPS and Galileo system time, respectively [s]
- , denote the satellite clock offsets for GPS and Galileo satellites, respectively [s];
- is the slant tropospheric delay [m];
- is the wavelength for the ionosphere-free linear combination [m];
- is the real value of the ambiguity ionosphere-free linear combination [cycles];
- , are other errors, for example noise and multipath [m].
- ‘BRDM’ solution: computed using only broadcast products, with the BRD400DLR broadcast ephemerides downloaded;
- ‘HAS’ solution: computed using broadcast ephemerides combined with HAS corrections. The products were collected in real-time using BNC software;
- ‘CNES’ solution: computed using CNES archive products. The broadcast ephemerides and real-time CNES corrections were converted to SP3 and CLK files;
- ‘CODE’ solution: computed using the final CODE MGEX products. These products were downloaded as SP3 and CLK with 5 min and 30 s intervals, respectively.
3. Results
3.1. Solution Availability
3.2. Convergence Time
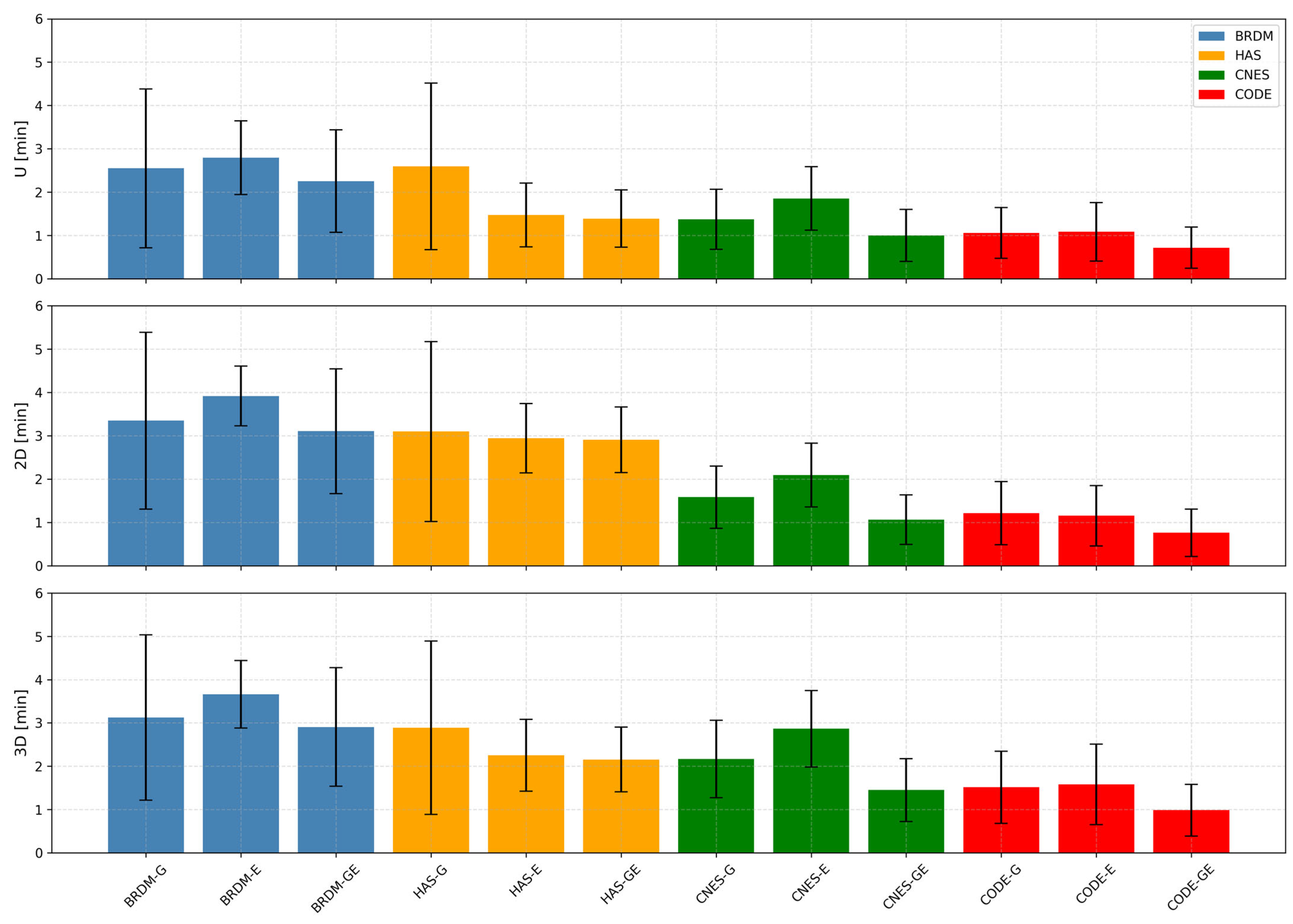
3.3. Accuracy
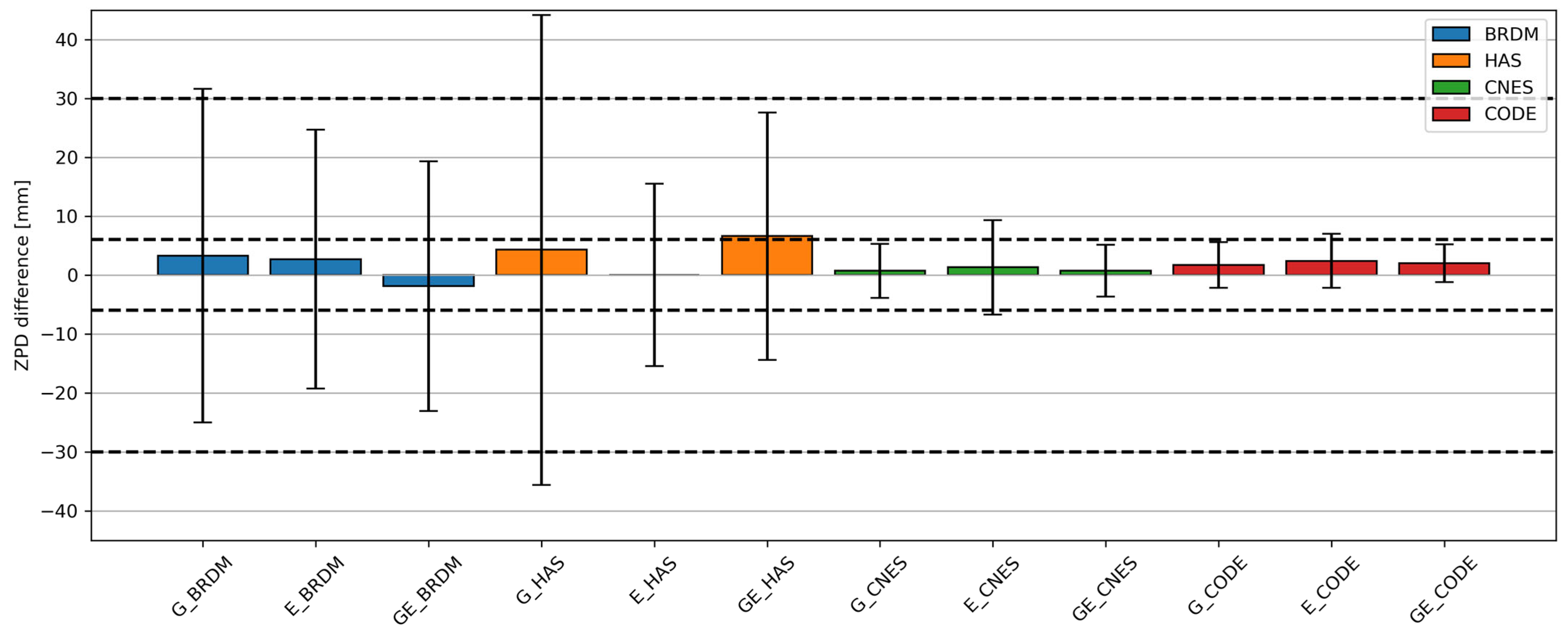
3.4. ZTD (Zenith Tropospheric Delay)
4. Discussion
5. Summary
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Analysis Center |
| APC | Antenna Phase Center |
| AR | Ambiguity Resolution |
| BNC | BKG NTRIP Client |
| CLAS | Centimeter-Level Augmentation Service |
| CNES | Centre National d’Études Spatiales |
| CODE | Center for Orbit Determination in Europe |
| DoY | Day of Year |
| EKF | Extended Kalman filter |
| GNSS | Global Navigation Satellite System |
| GPT | Global Pressure and Temperature |
| GPS | Global Positioning System |
| HAS | High Accuracy Service |
| IERS | International Earth Rotation and Reference Systems Service |
| IGS | International GNSS Service |
| NWP | Numerical Weather Prediction |
| OSB | Observable-specific Signal Bias |
| PCO | Phase Canter Offset |
| PCV | Phase Center Variations |
| PPP | Precise Point Positioning |
| PWV | Precipitable Water Vapor |
| QZSS | Quasi-Zenith Satellite System |
| RTK | Real-Time Kinematic |
| RTS | Real-Time Service |
| VMF | Vienna Mapping Functions |
| TGD | Time Group Delay |
| ZTD | Zenith Tropospheric Delay |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solution | GNSS | N | E | U | 2D | D3 |
|---|---|---|---|---|---|---|
| BRDM | G | 2.24 | 3.17 | 2.55 | 3.35 | 3.13 |
| E | 2.34 | 3.51 | 2.80 | 3.92 | 3.66 | |
| GE | 1.82 | 2.86 | 2.25 | 3.10 | 2.91 | |
| HAS | G | 2.07 | 2.82 | 2.59 | 3.10 | 2.89 |
| E | 1.14 | 2.66 | 1.47 | 2.94 | 2.25 | |
| GE | 1.20 | 2.61 | 1.39 | 2.91 | 2.16 | |
| CNES | G | 0.61 | 1.50 | 1.37 | 1.58 | 2.17 |
| E | 0.88 | 1.83 | 1.85 | 2.09 | 2.87 | |
| GE | 0.52 | 0.98 | 1.00 | 1.06 | 1.45 | |
| CODE | G | 0.54 | 1.14 | 1.06 | 1.21 | 1.52 |
| E | 0.50 | 1.02 | 1.08 | 1.15 | 1.58 | |
| GE | 0.40 | 0.69 | 0.72 | 0.76 | 0.98 |
| Solution | GNSS | N | E | U | 2D | D3 |
|---|---|---|---|---|---|---|
| BRDM | G | 1.62 | 1.97 | 1.83 | 2.04 | 1.91 |
| E | 0.72 | 0.69 | 0.85 | 0.69 | 0.78 | |
| GE | 1.03 | 1.45 | 1.18 | 1.44 | 1.37 | |
| HAS | G | 1.64 | 1.97 | 1.92 | 2.07 | 2.00 |
| E | 0.62 | 0.82 | 0.73 | 0.80 | 0.83 | |
| GE | 0.62 | 0.74 | 0.66 | 0.76 | 0.75 | |
| CNES | G | 0.39 | 0.70 | 0.70 | 0.72 | 0.89 |
| E | 0.41 | 0.72 | 0.73 | 0.74 | 0.88 | |
| GE | 0.41 | 0.59 | 0.60 | 0.57 | 0.73 | |
| CODE | G | 0.51 | 0.69 | 0.59 | 0.73 | 0.83 |
| E | 0.43 | 0.67 | 0.67 | 0.70 | 0.93 | |
| GE | 0.42 | 0.53 | 0.48 | 0.55 | 0.59 |
References
- Héroux, P.; Kouba, J. GPS Precise Point Positioning with a Difference; Natural Resources Canada, Geomatics Canada, Geodetic Survey Division: Ottawa, ON, Canada, 1995. [Google Scholar]
- Malys, S.; Jensen, P.A. Geodetic Point Positioning with GPS Carrier Beat Phase Data from the CASA UNO Experiment. Geophys. Res. Lett. 1990, 17, 651–654. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Springer, T. New IGS Station and Satellite Clock Combination. GPS Solut. 2001, 4, 31–36. [Google Scholar] [CrossRef]
- Héroux, P.; Kouba, J. GPS Precise Point Positioning Using IGS Orbit Products. Phys. Chem. Earth Part A Solid Earth Geod. 2001, 26, 573–578. [Google Scholar] [CrossRef]
- Kouba, J.; Lahaye, F.; Tétreault, P. Precise Point Positioning. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J.G., Montenbruck, O., Eds.; Springer International Publishing: Cham, Switzerland, 2017; p. 723. [Google Scholar]
- Geng, J. GNSS Seismogeodesy; Elsevier: Amsterdam, The Netherlands, 2022; pp. 1–331. [Google Scholar] [CrossRef]
- Strasser, S.; Mayer-Gürr, T. The IGS Repro3 Contribution by TU Graz: Benefits and Challenges of an Uncombined and Undifferenced Processing Approach 2020. Available online: https://ui.adsabs.harvard.edu/abs/2020AGUFMG005.0003S/abstract (accessed on 12 June 2025).
- Liu, Z.; Li, Y.; Li, F.; Guo, J. Near Real-Time PPP-Based Monitoring of the Ionosphere Using Dual-Frequency GPS/BDS/Galileo Data. Adv. Space Res. 2018, 61, 1435–1443. [Google Scholar] [CrossRef]
- Ahmed, F.; Václavovic, P.; Teferle, F.N.; Douša, J.; Bingley, R.; Laurichesse, D. Comparative Analysis of Real-Time Precise Point Positioning Zenith Total Delay Estimates. GPS Solut. 2016, 20, 187–199. [Google Scholar] [CrossRef]
- Hohensinn, R.; Aichinger-Rosenberger, M.; Wareyka-Glaner, M.F.; Ravanelli, M. Natural-Hazard Monitoring with Global Navigation Satellite Systems (GNSS). Adv. Geophys. 2024, 65, 1–123. [Google Scholar] [CrossRef]
- Marut, G.; Hadas, T.; Kazmierski, K.; Bosy, J. Affordable Real-Time PPP—Combining Low-Cost GNSS Receivers with Galileo HAS Corrections in Static, Pseudo-Kinematic, and UAV Experiments. Remote Sens. 2024, 16, 4008. [Google Scholar] [CrossRef]
- Li, X.; Barriot, J.P.; Lou, Y.; Zhang, W.; Li, P.; Shi, C. Towards Millimeter-Level Accuracy in GNSS-Based Space Geodesy: A Review of Error Budget for GNSS Precise Point Positioning. Surv. Geophys. 2023, 44, 1691–1780. [Google Scholar] [CrossRef]
- Banville, S.; Geng, J.; Loyer, S.; Schaer, S.; Springer, T.; Strasser, S. On the Interoperability of IGS Products for Precise Point Positioning with Ambiguity Resolution. J. Geod. 2020, 94, 10. [Google Scholar] [CrossRef]
- Lin, J.; Geng, J.; Yan, Z.; Masoumi, S.; Zhang, Q. Correcting Antenna Phase Center Effects to Reconcile the Code/Phase Bias Products from the Third IGS Reprocessing Campaign. GPS Solut. 2023, 27, 70. [Google Scholar] [CrossRef]
- Gao, R.; Liu, Z.; Odolinski, R.; Zhang, B. Improving GNSS PPP-RTK through Global Forecast System Zenith Wet Delay Augmentation. GPS Solut. 2024, 28, 1–14. [Google Scholar] [CrossRef]
- An, X.; Ziebold, R.; Lass, C. PPP-RTK with Rapid Convergence Based on SSR Corrections and Its Application in Transportation. Remote Sens. 2023, 15, 4770. [Google Scholar] [CrossRef]
- Kiliszek, D.; Szołucha, M.; Kroszczyński, K. Accuracy of Precise Point Positioning (PPP) with the Use of Different International GNSS Service (IGS) Products and Stochastic Modelling. Geod. Cartogr. 2018, 67, 207–238. [Google Scholar] [CrossRef]
- Zajdel, R.; Masoumi, S.; Sośnica, K.; Gałdyn, F.; Strugarek, D.; Bury, G. Combination and SLR Validation of IGS Repro3 Orbits for ITRF2020. J. Geod. 2023, 97, 1–29. [Google Scholar] [CrossRef]
- Mansur, G.; Brack, A.; Sakic, P.; Männel, B.; Schuh, H. Utilizing Least Squares Variance Component Estimation to Combine Multi-GNSS Clock Offsets. GPS Solut. 2024, 28, 1–14. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Jiao, G. Assessment of Multi-Frequency Global Navigation Satellite System Precise Point Positioning Models Using GPS, BeiDou, GLONASS, Galileo and QZSS. Meas. Sci. Technol. 2020, 31, 064008. [Google Scholar] [CrossRef]
- Hou, Z.; Zhou, F. Assessing the Performance of Precise Point Positioning (PPP) with the Fully Serviceable Multi-GNSS Constellations: GPS, BDS-3, and Galileo. Remote Sens. 2023, 15, 807. [Google Scholar] [CrossRef]
- Kiliszek, D.; Kroszczyński, K. Performance of the Precise Point Positioning Method along with the Development of GPS, GLONASS and Galileo Systems. Measurement 2020, 164, 108009. [Google Scholar] [CrossRef]
- Kiliszek, D.; Kroszczyński, K.; Araszkiewicz, A. Analysis of Different Weighting Functions of Observations for GPS and Galileo Precise Point Positioning Performance. Remote Sens. 2022, 14, 2223. [Google Scholar] [CrossRef]
- Bahadur, B. Real-Time Single-Frequency Precise Positioning with Galileo Satellites. J. Navig. 2022, 75, 1–124. [Google Scholar] [CrossRef]
- Mikoś, M.; Kazmierski, K.; Wachulec, N.; Sośnica, K. Accuracy of Satellite Positioning Using GNSS Receivers in Sports Watches. Measurement 2024, 229, 114426. [Google Scholar] [CrossRef]
- GPS Space Segment. Available online: https://www.gps.gov/systems/gps/space/#generations (accessed on 14 June 2025).
- Galileo Constellation Status. Available online: https://www.gsc-europa.eu/system-service-status/constellation-information (accessed on 14 June 2025).
- Hadas, T.; Kazmierski, K.; Sośnica, K. Performance of Galileo-Only Dual-Frequency Absolute Positioning Using the Fully Serviceable Galileo Constellation. GPS Solut. 2019, 23, 108. [Google Scholar] [CrossRef]
- Carlin, L.; Hauschild, A.; Montenbruck, O. Precise Point Positioning with GPS and Galileo Broadcast Ephemerides. GPS Solut. 2021, 25, 1–13. [Google Scholar] [CrossRef]
- Alonso, M.T.; Sanz, J.; Juan, J.M.; García, A.R.; Casado, G.G. Galileo Broadcast Ephemeris and Clock Errors Analysis: 1 January 2017 to 31 July 2020. Sensors 2020, 20, 6832. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS Precise Orbits and Clocks Verification and Quality Degradation over Time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef]
- Elsobeiey, M.; Al-Harbi, S. Performance of Real-Time Precise Point Positioning Using IGS Real-Time Service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Real-Time Service (RTS)—International GNSS Service. Available online: https://igs.org/rts/ (accessed on 14 June 2025).
- BKG Ntrip Client—BNC. Available online: https://igs.bkg.bund.de/ntrip/download (accessed on 14 June 2025).
- RTS Contributors—International GNSS Service. Available online: https://igs.org/rts/contributors/#real-time-analysis-centers (accessed on 14 June 2025).
- Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive Assessment of Real-Time Precise Products from IGS Analysis Centers. Satell. Navig. 2022, 3, 1–17. [Google Scholar] [CrossRef]
- Cabinet Office, Government of Japan. Quasi-Zenith Satellite System Interface Specification: Centimeter Level Augmentation Service (IS-QZSS-L6-004). Available online: https://qzss.go.jp/en/technical/download/pdf/ps-is-qzss/is-qzss-l6-004.pdf (accessed on 14 June 2025).
- Galileo High Accuracy Service (HAS)|European GNSS Service Centre (GSC). Available online: https://www.gsc-europa.eu/galileo/services/galileo-high-accuracy-service-has (accessed on 14 June 2025).
- EUSPA Galileo High Accuracy Service Service Definition Document (HAS SDD), Issue 1.0. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-HAS-SDD_v1.0.pdf (accessed on 14 June 2025).
- EUSPA Galileo High Accuracy Service Info Note. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_Info_Note.pdf (accessed on 14 June 2025).
- Horst, O.; Kirkko-Jaakkola, M.; Malkamäki, T.; Kaasalainen, S.; Fernández-Hernández, I.; Moreno, A.C.; Díaz, S.C. HASlib: An Open-Source Decoder for the Galileo High Accuracy Service. In Proceedings of the 35th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2022, Denver, CO, USA, 19–23 September 2022; Volume 4, pp. 2625–2633. [Google Scholar] [CrossRef]
- Zhang, R.; Tu, R.; Lu, X. HASPPP: An Open-Source Galileo HAS Embeddable RTKLIB Decoding Package. GPS Solut. 2024, 28, 1–7. [Google Scholar] [CrossRef]
- Zhao, L. Python Toolbox for BDS PPP-B2b and Galileo HAS Decoding and Its Products Performance Validation. GPS Solut. 2025, 29, 1–10. [Google Scholar] [CrossRef]
- Naciri, N.; Yi, D.; Bisnath, S.; de Blas, F.J.; Capua, R. Assessment of Galileo High Accuracy Service (HAS) Test Signals and Preliminary Positioning Performance. GPS Solut. 2023, 27, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Wang, W.; Yin, J.; Wu, K.; Zhou, L.; Yao, Y.; Wang, P.; Su, J.; Wang, X.; Wang, H.; et al. Real-Time Retrieval of High-Precision ZTD Maps Using GNSS Observation. Geod. Geodyn. 2024. [Google Scholar] [CrossRef]
- Susi, M.; Borio, D.; Azeez, A.; Park, J.; Wezka, K.; Fernandez-Hernandez, I. Assessing the High-Accuracy Service at High Latitudes. Eng. Proc. 2023, 54, 8. [Google Scholar] [CrossRef]
- Prol, F.S.; Kirkko-Jaakkola, M.; Horst, O.; Malkamäki, T.; Bhuiyan, M.Z.H.; Kaasalainen, S.; Fernández-Hernández, I. Enabling the Galileo High Accuracy Service with Open-Source Software: Integration of HASlib and RTKLIB. GPS Solut. 2024, 28, 1–13. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, S.; Xu, Y.; Tang, L.; Yang, N.; Zhang, G. GNSS Real-Time ZTD/PWV Retrieval Based on PPP with Broadcast Ephemerides. Atmosphere 2024, 15, 1030. [Google Scholar] [CrossRef]
- Lu, C.; Li, X.; Nilsson, T.; Ning, T.; Heinkelmann, R.; Ge, M.; Glaser, S.; Schuh, H. Real-Time Retrieval of Precipitable Water Vapor from GPS and BeiDou Observations. J. Geod. 2015, 89, 843–856. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, K.; Rohm, W.; Choy, S.; Norman, R.; Wang, C.S. Real-Time Retrieval of Precipitable Water Vapor from GPS Precise Point Positioning. J. Geophys. Res. Atmos. 2014, 119, 10044–10057. [Google Scholar] [CrossRef]
- Li, H.; Choy, S.; Wang, X.; Liang, H.; Purwar, S.; Zhang, K. Investigating the Optimal Spatial Resolution for Assimilating GNSS PWV Into an NWP System to Improve the Accuracy of Humidity Field. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 6876–6888. [Google Scholar] [CrossRef]
- Glaner, M.F. Towards Instantaneous PPP Convergence Using Multiple GNSS Signals. Ph.D. Thesis, Technische Universität Wien, Wien, Austria, 2022. [Google Scholar]
- Glaner, M.F.; Weber, R. An Open-Source Software Package for Precise Point Positioning: RaPPPid. GPS Solut. 2023, 27, 1–11. [Google Scholar] [CrossRef]
- Petit, G.; Brian, L. IERS Conventions 2010. Available online: https://apps.dtic.mil/sti/tr/pdf/ADA535671.pdf (accessed on 14 June 2025).
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined Discrete and Empirical Troposphere Mapping Functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Montenbruck, O.; Tang, C. Quality Assessment of GPS, Galileo and BeiDou-2/3 Satellite Broadcast Group Delays. Adv. Space Res. 2019, 64, 1764–1779. [Google Scholar] [CrossRef]


| Station | Receiver | Antenna |
|---|---|---|
| ALIC00AUS | SEPT POLARX5 | TWIVC6050 NONE |
| CEBR00ESP | SEPT POLARX5TR | SEPCHOKE_B3E6 NONE |
| CORD00ARG | SEPT POLARX5 | TPSCR.G3 NONE |
| DAV100ATA | SEPT POLARX5 | LEIAR25.R3 LEIT |
| GANP00SVK | TRIMBLE ALLOY | TRM59800.00 SCIS |
| HOFN00ISL | LEICA GR50 | LEIAR25.R4 LEIT |
| POHN00FSM | SEPT POLARX5 | JAVRINGANT_DM NONE |
| SASK00CAN | JAVAD TRE_G3TH DELTA | NOV750.R4 NOVS |
| SOD300FIN | JAVAD TRE_3 DELTA | JAVRINGANT_DM SCIS |
| URUM00CHN | JAVAD TRE_3 | JAVRINGANT_G5T NONE |
| WIND00NAM | JAVAD TRE_3 | JAVRINGANT_G5T NONE |
| YKRO00CIV | JAVAD TRE_3 DELTA | ASH701945C_M NONE |
| Solution Name | Products |
|---|---|
| BRDM | broadcast products BRD400DLR; GPS LNAV and Galileo INAV |
| HAS | broadcast products BCEP00BKG0 with HAS corrections SSRA00EUH0; GPS LNAV and Galileo INAV; collected in real-time with BNC software (https://igs.bkg.bund.de/ntrip/bnc (accessed on 14 June 2025)) |
| CNES | broadcast products with IGS RTS CNES corrections converted to daily CNES archive products as SP3, CLK, and BIA (http://www.ppp-wizard.net/products/REAL_TIME/ (accessed on 14 June 2025) |
| CODE | precise CODE MGEX FINAL products: SP3 with 5 min interval, CLK with 30 s interval |
| Items | Models/Methods |
|---|---|
| Positioning mode | static mode |
| PPP model | conventional PPP model using undifferenced dual-frequency code and phase ionosphere-free linear combination |
| Sessions | eight three-hour sessions per day (48 sessions for each station from six days) |
| Signals | BRDM, CNES, and CODE solutions: L1/L2 for GPS and E1/E5a for Galileo HAS solution: L1/L2 for GPS and E1/E5b for Galileo |
| Stochastic modeling | |
| Constellation | GPS (G), Galileo (E), GPS+Galileo (GE) |
| Standard deviation of raw observations | code = 0.300 m, phase = 0.002 m |
| Cut-off elevation angle | 10° |
| Interval estimation | 1-s |
| Periods | six days: from 223 DoY to 228 DoY of 2024 |
| Reference frame | IGS20 |
| Reference coordinates | daily IGS SINEX files |
| PCO and PCV for satellite antenna | igs20.atx for CNES and CODE solutions; for BRDM and HAS the products were referred to APC |
| PCO and PCV for receiver antenna | igs20.atx |
| Ionospheric delay | ionosphere-free linear combination |
| Tropospheric delay | a priori value: GPT3 (VMF3 for CODE solution) estimated: wet component mapping function: GPT3 (VMF3 for CODE solution) gradients: estimated |
| Solid tides, ocean loading, Shapiro effects, phase wind-up | IERS convention 2010 |
| Ambiguities | float |
| Receiver clock correction | estimated separately for each system |
| Solution | GNSS | Number of Used Satellites | Availability [%] |
|---|---|---|---|
| BRDM | G | 8.9 | 100.0 |
| E | 6.8 | 99.8 | |
| GE | 15.6 | 100.0 | |
| HAS | G | 5.0 | 74.0 |
| E | 6.9 | 99.9 | |
| GE | 10.6 | 99.1 | |
| CNES | G | 9.0 | 100.0 |
| E | 6.5 | 99.7 | |
| GE | 15.5 | 100.0 | |
| CODE | G | 9.3 | - |
| E | 8.1 | - | |
| GE | 17.4 | - |
| Solution | GNSS | U | 2D | 3D |
|---|---|---|---|---|
| BRDM | G | 80.7 | 27.4 | 35.9 |
| E | 92.0 | 64.6 | 70.8 | |
| GE | 93.2 | 62.8 | 74.0 | |
| HAS | G | 45.1 | 22.2 | 26.0 |
| E | 75.0 | 70.7 | 73.3 | |
| GE | 75.0 | 71.0 | 74.0 | |
| CNES | G | 99.1 | 99.5 | 97.6 |
| E | 96.2 | 96.7 | 91.7 | |
| GE | 99.6 | 99.6 | 99.0 | |
| CODE | G | 100.0 | 99.5 | 99.5 |
| E | 99.8 | 99.6 | 98.8 | |
| GE | 100.0 | 99.8 | 99.6 |
| Solution | GNSS | N | E | U | 2D | 3D |
|---|---|---|---|---|---|---|
| BRDM | G | −1.9 | 1.4 | −6.1 | 64.8 | 93.2 |
| E | −3.4 | 3.56 | −0.7 | 50.3 | 71.3 | |
| GE | 1.0 | −1.5 | −0.9 | 49.6 | 69.4 | |
| HAS | G | 0.4 | −7.9 | −2.5 | 86.2 | 128.5 |
| E | 0.2 | 0.1 | 1.5 | 18.9 | 28.8 | |
| GE | −0.2 | 0.1 | 0.4 | 19.9 | 29.5 | |
| CNES | G | −0.5 | −1.2 | 0.0 | 5.7 | 8.0 |
| E | −1.0 | −1.4 | −0.2 | 7.2 | 11.2 | |
| GE | −0.6 | −1.0 | 0.0 | 4.0 | 5.7 | |
| CODE | G | 0.3 | −0.7 | −0.2 | 3.8 | 5.4 |
| E | 0.1 | 0.0 | −0.4 | 3.2 | 4.9 | |
| GE | 0.2 | −0.2 | −0.2 | 2.2 | 3.3 |
| Solution | GNSS | N | E | U | 2D | 3D |
|---|---|---|---|---|---|---|
| BRDM | G | 11.4 | 25.0 | 31.8 | 17.6 | 21.7 |
| E | 6.8 | 19.6 | 14.9 | 13.1 | 16.8 | |
| GE | 15.7 | 26.6 | 24.1 | 28.5 | 35.8 | |
| HAS | G | 21.8 | 41.8 | 47.0 | 38.9 | 47.4 |
| E | 3.2 | 6.1 | 9.1 | 6.1 | 10.2 | |
| GE | 3.4 | 7.4 | 8.6 | 6.7 | 10.0 | |
| CNES | G | 1.7 | 3.1 | 2.2 | 3.0 | 4.2 |
| E | 1.2 | 2.6 | 3.2 | 2.8 | 4.7 | |
| GE | 1.5 | 2.2 | 2.1 | 2.0 | 2.8 | |
| CODE | G | 1.5 | 2.1 | 1.4 | 2.9 | 4.1 |
| E | 0.6 | 1.1 | 1.3 | 1.9 | 3.0 | |
| GE | 1.2 | 1.1 | 0.8 | 1.8 | 2.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiliszek, D. GPS and Galileo Precise Point Positioning Performance with Tropospheric Estimation Using Different Products: BRDM, RTS, HAS, and MGEX. Remote Sens. 2025, 17, 2080. https://doi.org/10.3390/rs17122080
Kiliszek D. GPS and Galileo Precise Point Positioning Performance with Tropospheric Estimation Using Different Products: BRDM, RTS, HAS, and MGEX. Remote Sensing. 2025; 17(12):2080. https://doi.org/10.3390/rs17122080
Chicago/Turabian StyleKiliszek, Damian. 2025. "GPS and Galileo Precise Point Positioning Performance with Tropospheric Estimation Using Different Products: BRDM, RTS, HAS, and MGEX" Remote Sensing 17, no. 12: 2080. https://doi.org/10.3390/rs17122080
APA StyleKiliszek, D. (2025). GPS and Galileo Precise Point Positioning Performance with Tropospheric Estimation Using Different Products: BRDM, RTS, HAS, and MGEX. Remote Sensing, 17(12), 2080. https://doi.org/10.3390/rs17122080