
YOLO-SCNet: A Framework for Enhanced Detection of Small Lunar Craters

Abstract
1. Introduction
2. Materials and Methods
2.1. Study Regions
2.1.1. Lunar Image Classification
- Polar Regions (I): Complex terrain with rugged mountains and abundant craters, many of which are circular or elliptical. These areas exhibit varying albedo, with lower reflectivity near the poles and brighter surfaces in surrounding areas.
- High-Latitude Highlands (II): Characterized by dramatic topographic changes, including mountains, canyons, and slopes, with higher reflectivity compared to mare regions. Craters in these areas are relatively larger and exhibit complex shapes.
- Mid-Low Latitude Highlands (III): Defined by undulating terrain influenced by lava eruptions, volcanic activity, and magma intrusion, leading to altered crater morphology.
- Lunar Mare Regions (IV): Flat regions covered by extensive basaltic lava flows, with relatively low reflectivity. Craters in these areas are generally circular or elliptical with distinct outer walls, lacking significant central peaks or hills.
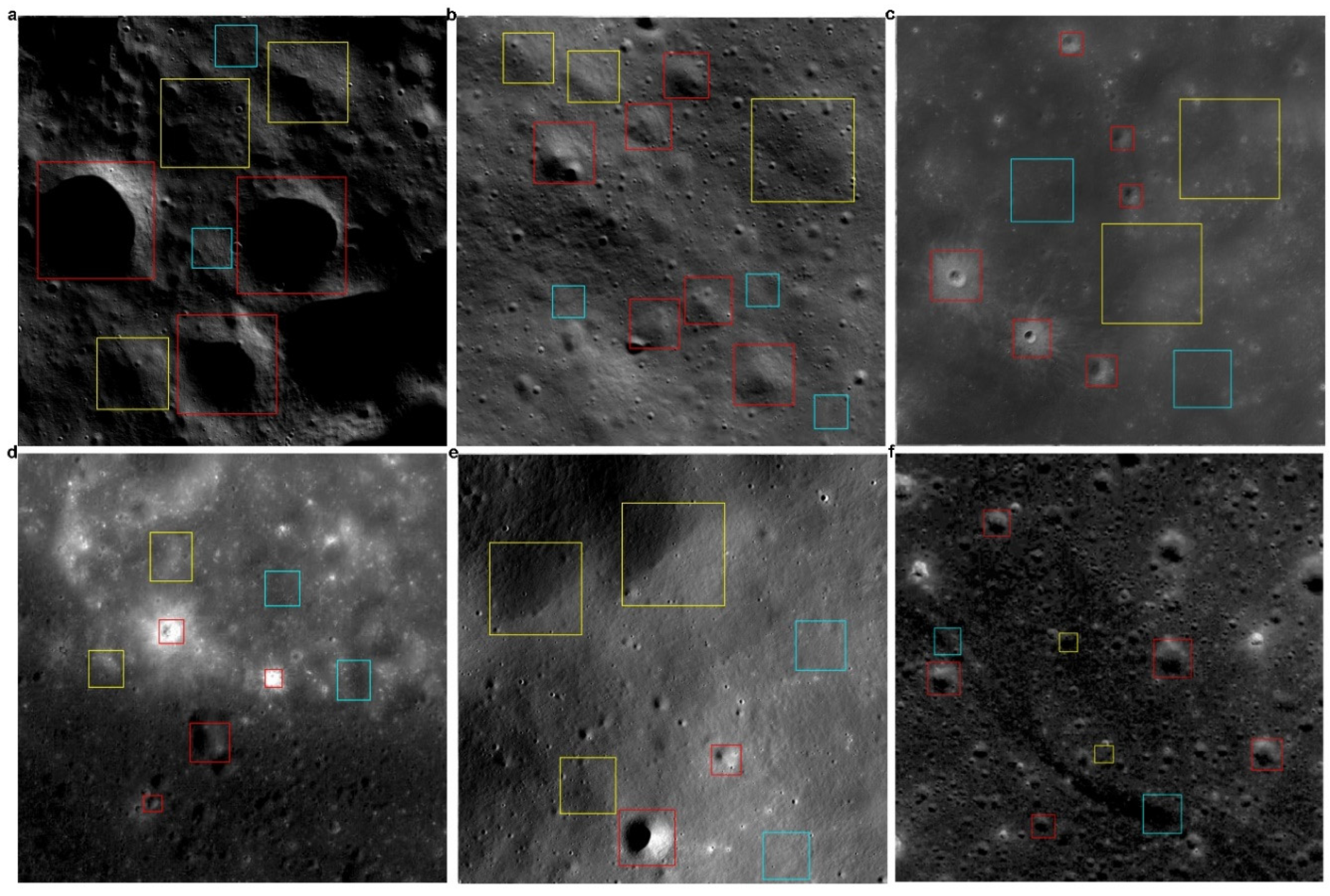
2.1.2. Crater Annotation Rules
- Class A (definite craters): Craters with clear boundaries and well-preserved morphology.
- Class B (probable craters): Craters with ambiguous boundaries, requiring subjective interpretation.
- Class C (non-craters): Geological features that are definitively not craters.
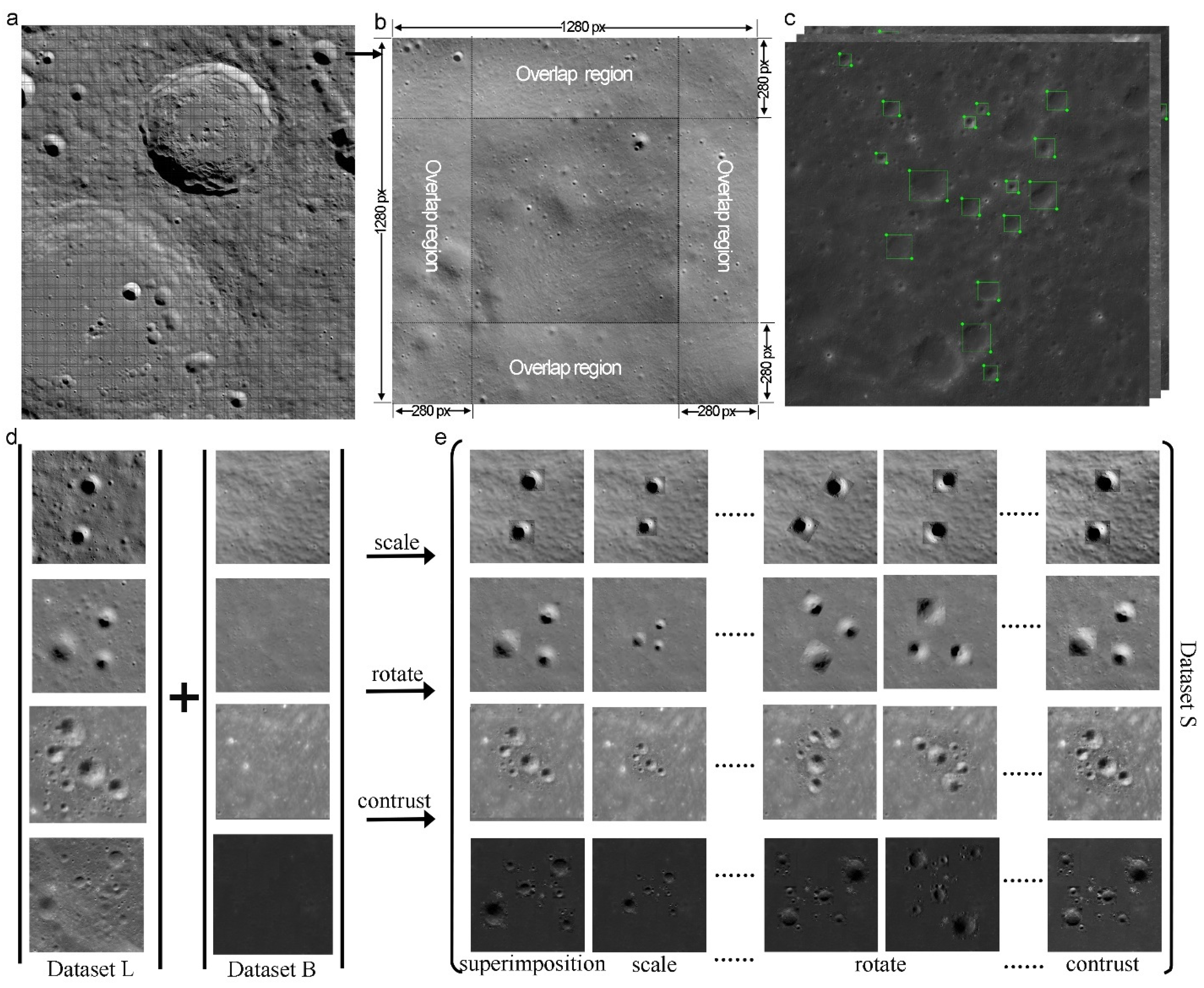
2.1.3. Sample Synthesis and Data Augmentation
2.1.4. Dataset Construction and Partitioning
2.2. YOLO-SCNet Detection Method
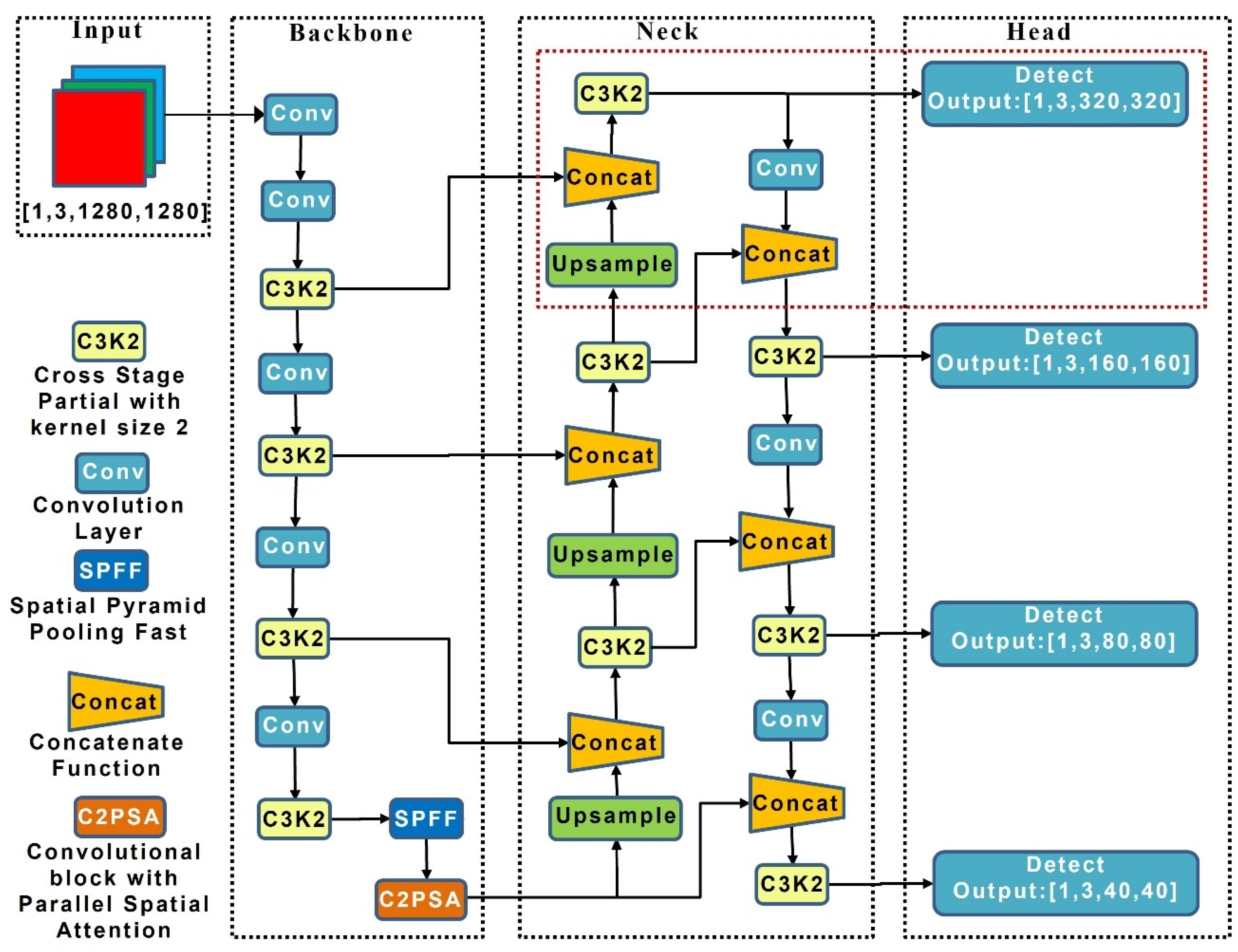
2.2.1. YOLO-SCNet Architecture and Key Features
2.2.2. Design and Optimization of the Small Object Detection Head
- Classification loss (Lcls) measures the discrepancy between predicted and true class labels.
- Localization loss (Lloc) evaluates the difference between predicted and true bounding box coordinates.
- Confidence loss (Lconf) assesses the accuracy of the model’s confidence predictions for bounding boxes.
- λ1, λ2, and λ3 are dynamically adjusted weight coefficients.
2.2.3. Model Training and Optimization
- Model Configuration and Training Environment: Experiments were conducted using PyTorch 1.12 on a robust, high-performance computing system. This system equipped with two Intel 6346 Xeon 16-core processors, two NVidia GeForce RTX 3090 Ti 24 GB GPUs, and 256 GB of memory, all operating under Ubuntu 20.04.5. Key parameters included an input size of 1280 × 1280, batch size of 8, initial learning rate of 0.01, momentum of 0.937, weight decay of 0.0005, and a total of 10 training epochs. The choice of 1280 × 1280 pixels as the input size was made to retain more image details and resolution, enabling the model to capture finer features. This is particularly crucial for detecting small craters, as the increased input size significantly improves detection accuracy.
- Dataset Partitioning: To ensure fairness in training, validation, and testing, we ultimately constructed a dataset consisting of 80,607 samples, which were collected from four distinct lunar regions (polar region, high-latitude highlands, mid-/low-latitude highlands, and lunar mare). This dataset was partitioned into training, validation, and testing sets in an 8:1:1 ratio. This partitioning ensures that each dataset represents different lunar terrains and lighting conditions, providing a comprehensive test of the model’s generalization capability.
- Training Strategies: To ensure optimal adaptation to lunar crater detection tasks, the following strategies were employed: (1) Fine-Tuning Pre-Trained Weights: The model was fine-tuned with pre-trained weights from ImageNet to adapt to the specific features of lunar craters. (2) Adaptive Learning Rate Scheduling: A dynamic learning rate adjustment strategy was employed to accelerate convergence and reduce the risk of overfitting. (3) k-Fold Cross-Validation: A 10-fold cross-validation approach was used to evaluate the stability of the model across different data partitions and reduce the potential bias introduced by a single dataset split. (4) Robustness Validation with Augmented Data: The model’s robustness was tested using augmented datasets with variations in noise, contrast, and lighting to simulate real-world imaging conditions. (5) Focused Small Crater Detection: Special attention was given to craters with diameters smaller than 200 m to ensure the model’s suitability for global lunar mapping and planetary geological studies.
- Post-Processing and Result Optimization: During detection, post-processing techniques were applied, including thresholding and Non-Maximum Suppression (NMS), to refine the model’s predictions. By setting confidence thresholds, low-confidence detections were filtered out, while NMS was used to eliminate overlapping bounding boxes, retaining only the highest-confidence predictions.
2.2.4. Performance Evaluation
- Precision (P): Measures the proportion of correctly identified craters among all predictions.
- Recall (R): Indicates the proportion of true craters detected by the model.
- F1 Score (F1): The harmonic mean of precision and recall, providing a balanced measure of performance.
- Average Precision (AP): Represents the area under the precision–recall curve across various IoU (Intersection over Union) thresholds, reflecting localization and classification accuracy. IoU is a metric used to assess the overlap between predicted and ground truth bounding boxes. It measures the degree of overlap by calculating the ratio of the intersection area to the union area of the two boxes.
- Area Under the Curve (AUC): Assesses the model’s ability to distinguish between true and false detections across different confidence levels.
3. Experimental Results
3.1. Ground Truth Data Preparation and Independent Regional Testing
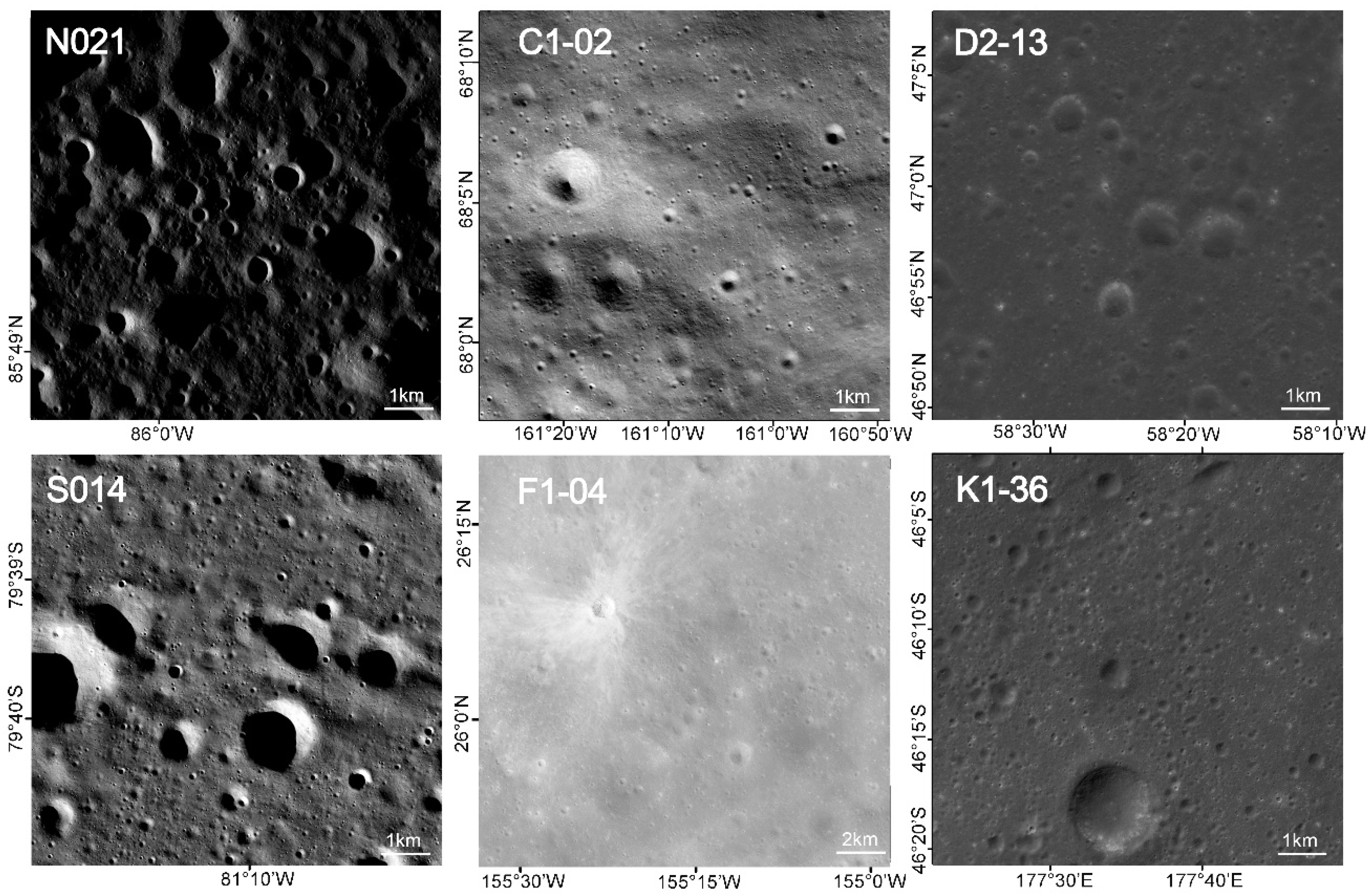
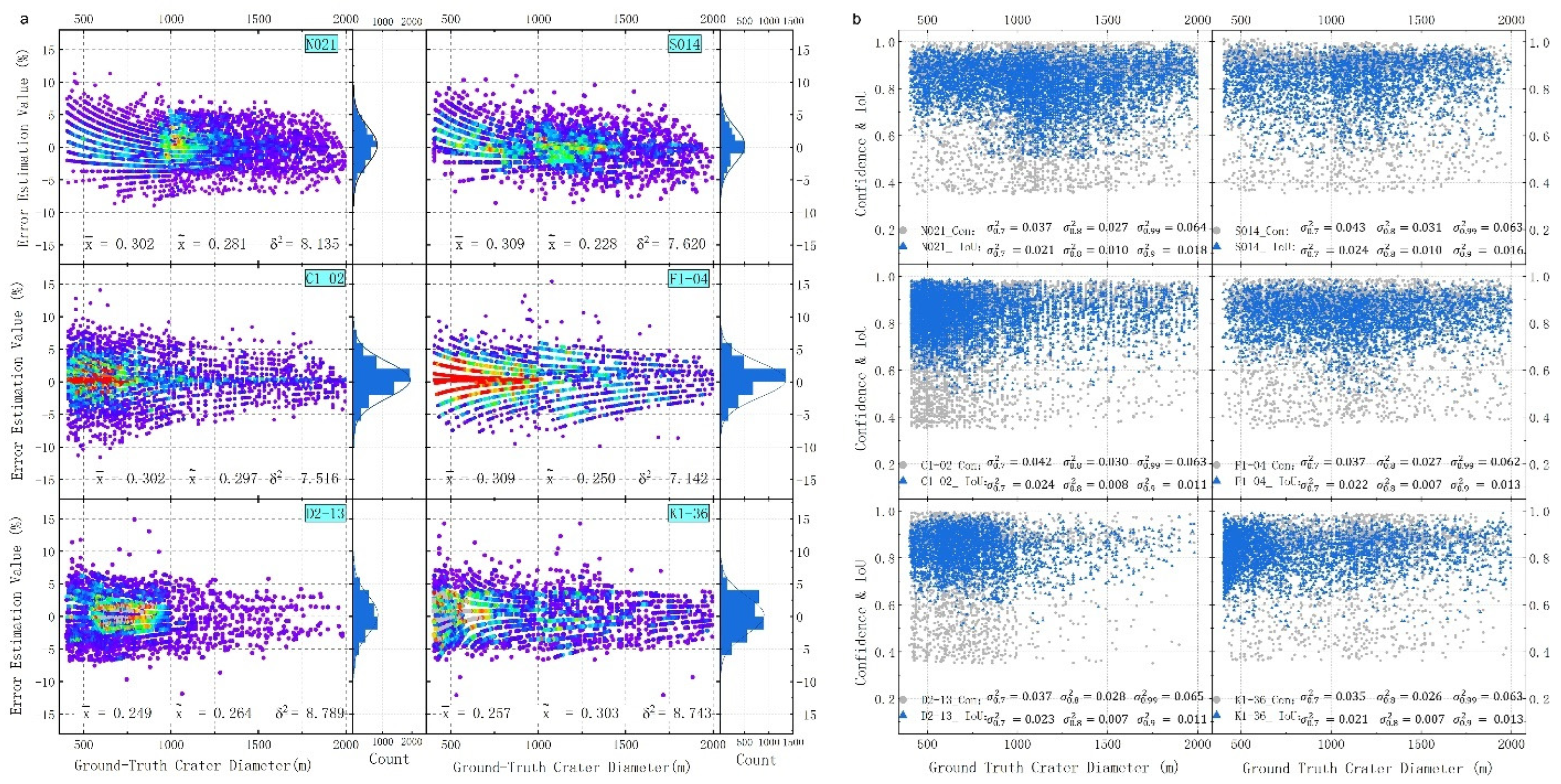
- I-1 (N021, North Pole): Bright surfaces near the polar region with abundant small craters exhibiting black-and-white wart-like structures.
- I-2 (S014, South Pole): Low-albedo areas with dim illumination and larger craters containing central stacks.
- II-1 (C1-02, Northern High-Latitude Highlands): Darker surface with the lowest albedo among similar regions, characterized by dramatic topographic variations.
- III-2 (F1-04, Mid-/Low-Latitude Highlands): Bright ejecta material with higher reflectivity, featuring craters altered by volcanic activity and lava flows.
- IV-2 (D2-13, Lunar Near-Side Mare): Darker near-side regions with low reflectivity and distinct circular craters.
- IV-3 (K1-36, Lunar Far-Side Mare): Far-side regions with moderate albedo and circular craters with smooth edges.
- Medium-sized craters (400 m–2 km) Annotated across the entire extent of the six regions to assess the model’s ability to detect craters of moderate size.
- Small craters (200 m–2 km): Fine-grained annotations in specific areas to evaluate the model’s precision in detecting smaller craters.
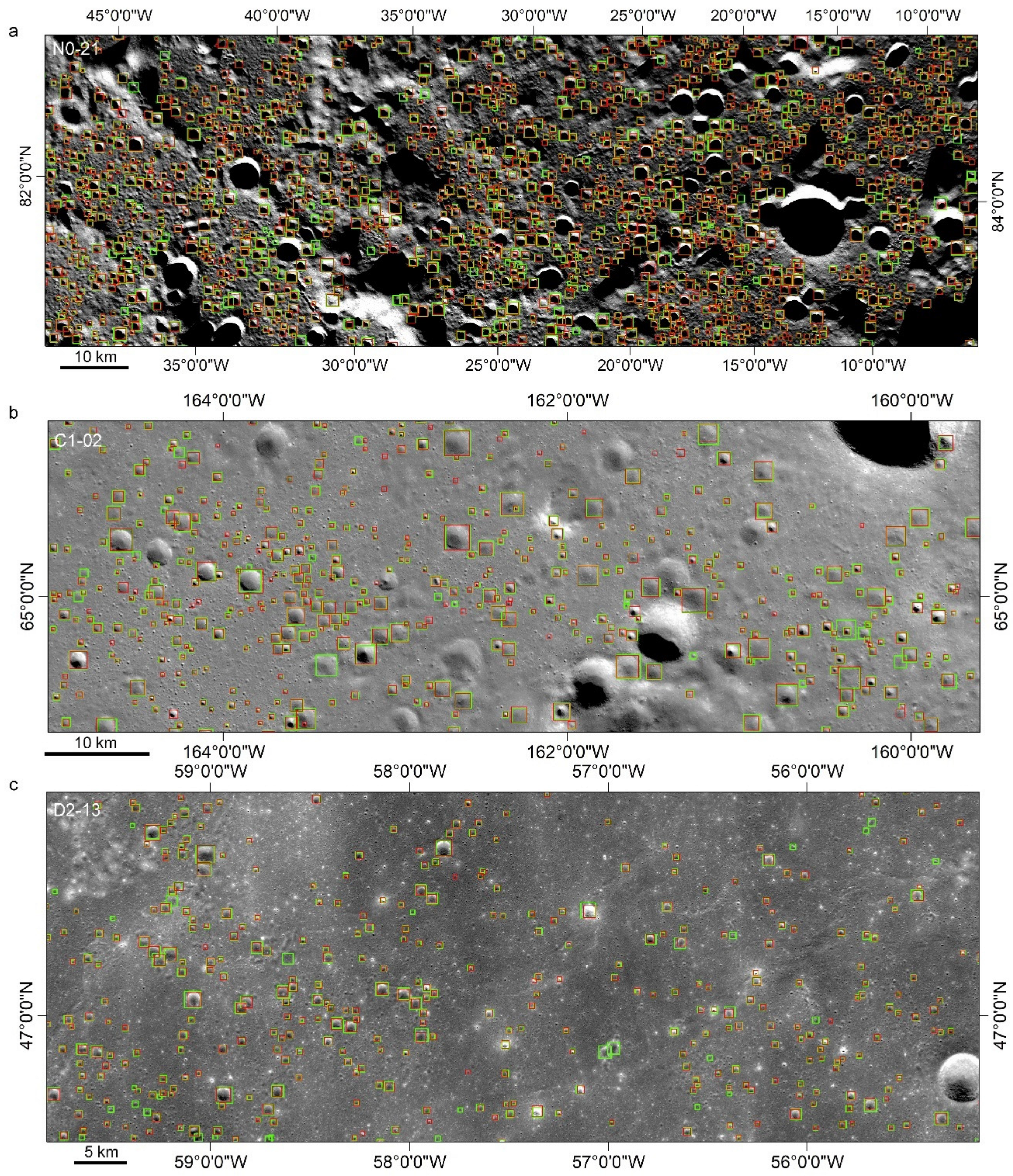
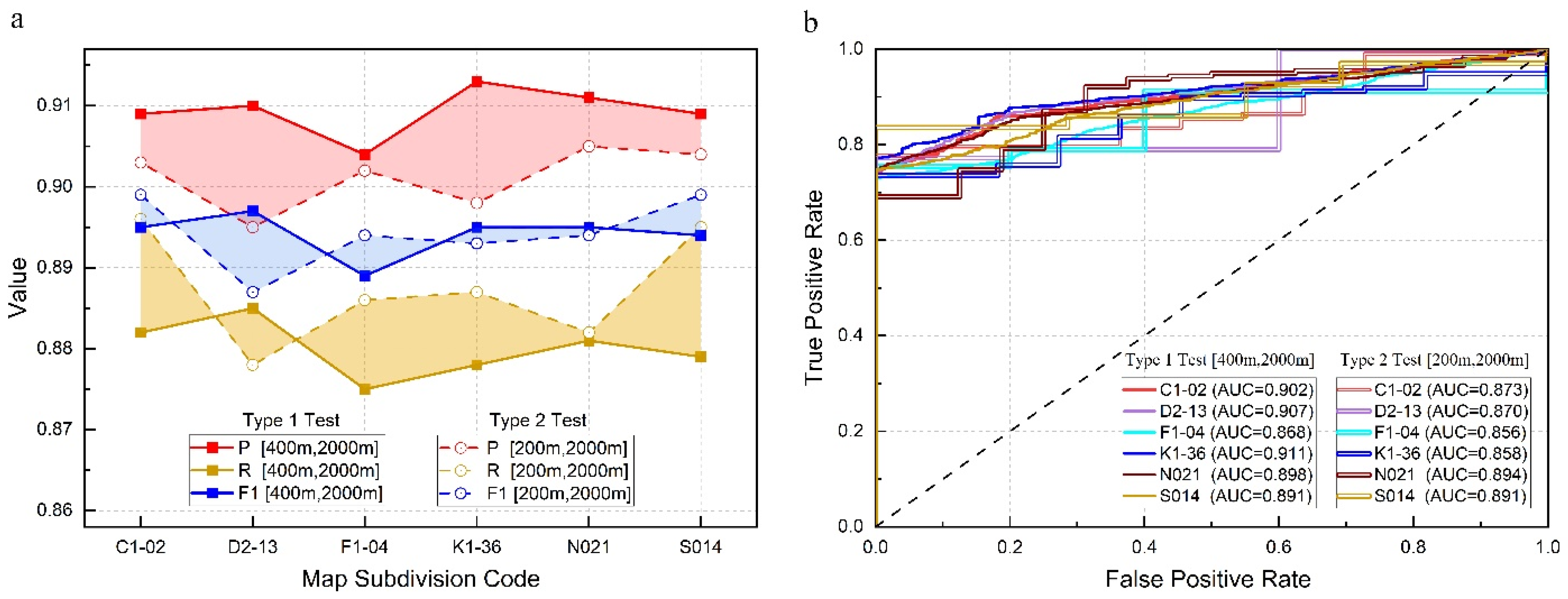
3.2. Type 1 Test: Detection of Medium-Sized Craters (400 m–2 km)
- Highlands (including C1-02 and F1-04): In high-latitude highland regions with significant terrain variations and higher reflectance, the model still demonstrated exceptional adaptability. In the C1-02 northern high-latitude highland, where the reflectance was low and the terrain complex, the model successfully detected most craters, with a precision of 90.9% and recall of 88.2%. In the F1-04 mid-latitude highlands, influenced by volcanic activity and lava flows, which caused alterations in crater morphology, the model achieved a precision of 90.4% and recall of 87.5%, fully reflecting its robustness in complex terrains.
- Mare Regions (including D2-13 and K1-36): In the mare regions, YOLO-SCNet also demonstrated strong detection capabilities. In the D2-13 mare region, where the craters were mostly round or elliptical with clear edges, the model achieved a precision of 91.0% and recall of 88.5%. In the K1-36 mare region, with similar crater features, the model’s precision was 91.3% and recall 87.8%. These results indicate that YOLO-SCNet can accurately identify craters even in low reflectance and flat terrains.
- Polar Regions (including N021 and S014): In extreme environments, the model exhibited outstanding adaptability. In the N021 polar region, despite the low reflectance, the model was able to accurately identify a large number of craters, achieving a precision of 91.1% and recall of 88.1%. In the S014 Antarctic region, under high contrast and complex lighting conditions, YOLO-SCNet also performed excellently, with a precision of 90.9% and recall of 87.9%, demonstrating its stability in polar environments.
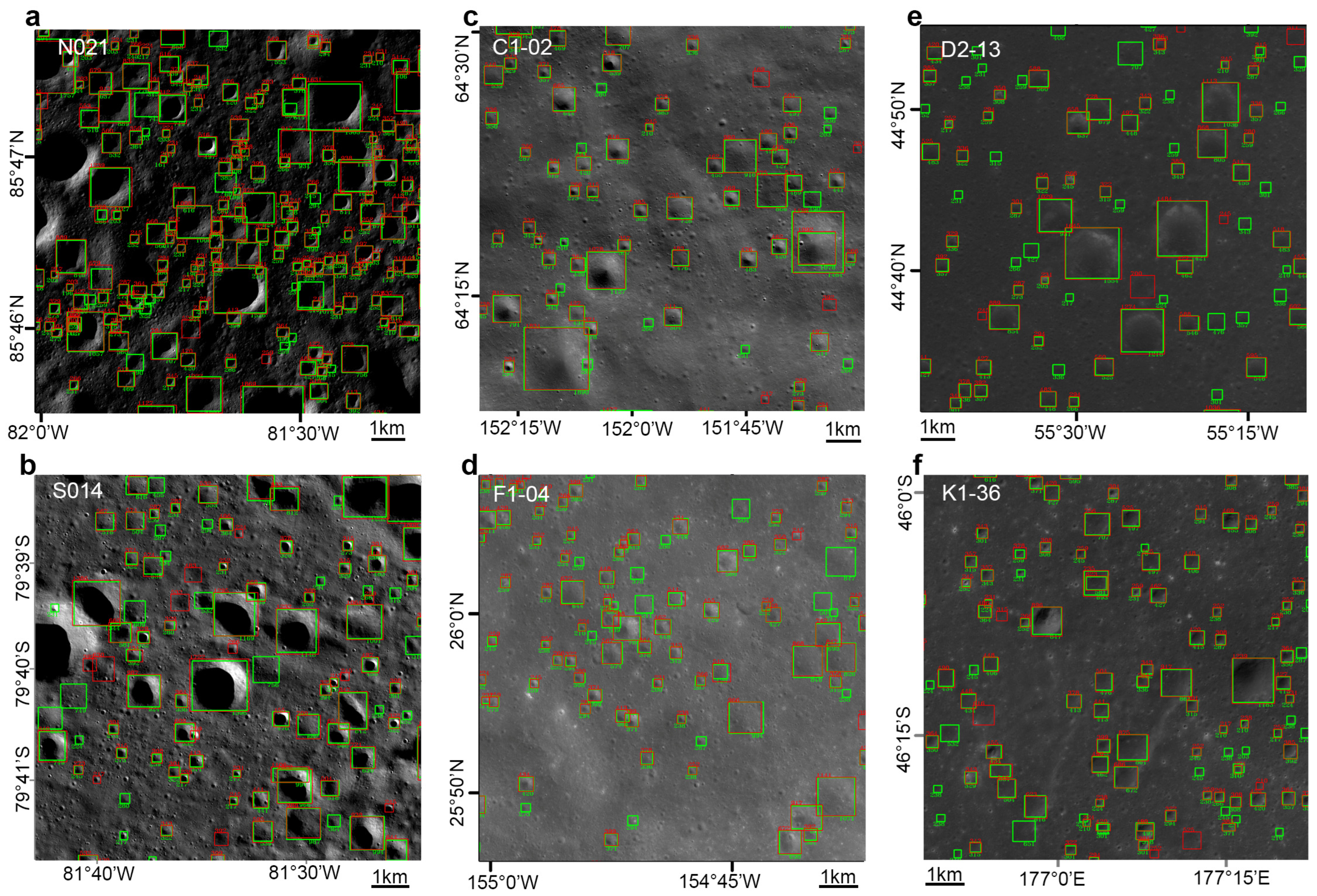
3.3. Type 2 Test: Detection of Small Craters (200 m–2 km)
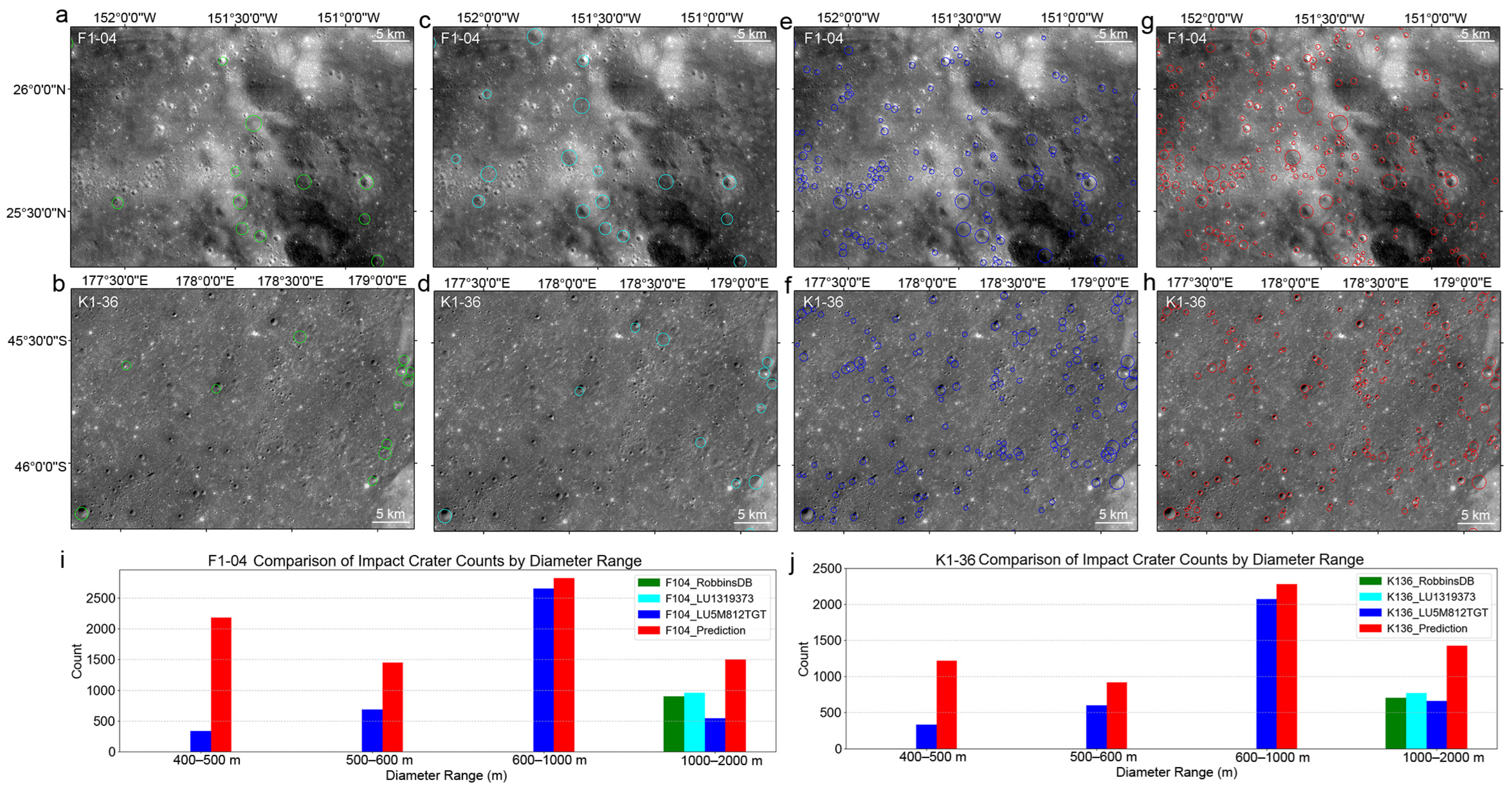
3.4. Type 3 Test: Database Comparison and Detection Expansion (400 m–2 km)
3.5. Summary of Experimental Results
- An average precision of 90.9%, recall of 88.0%, and F1 score of 89.4% for medium-sized craters (400 m–2 km).
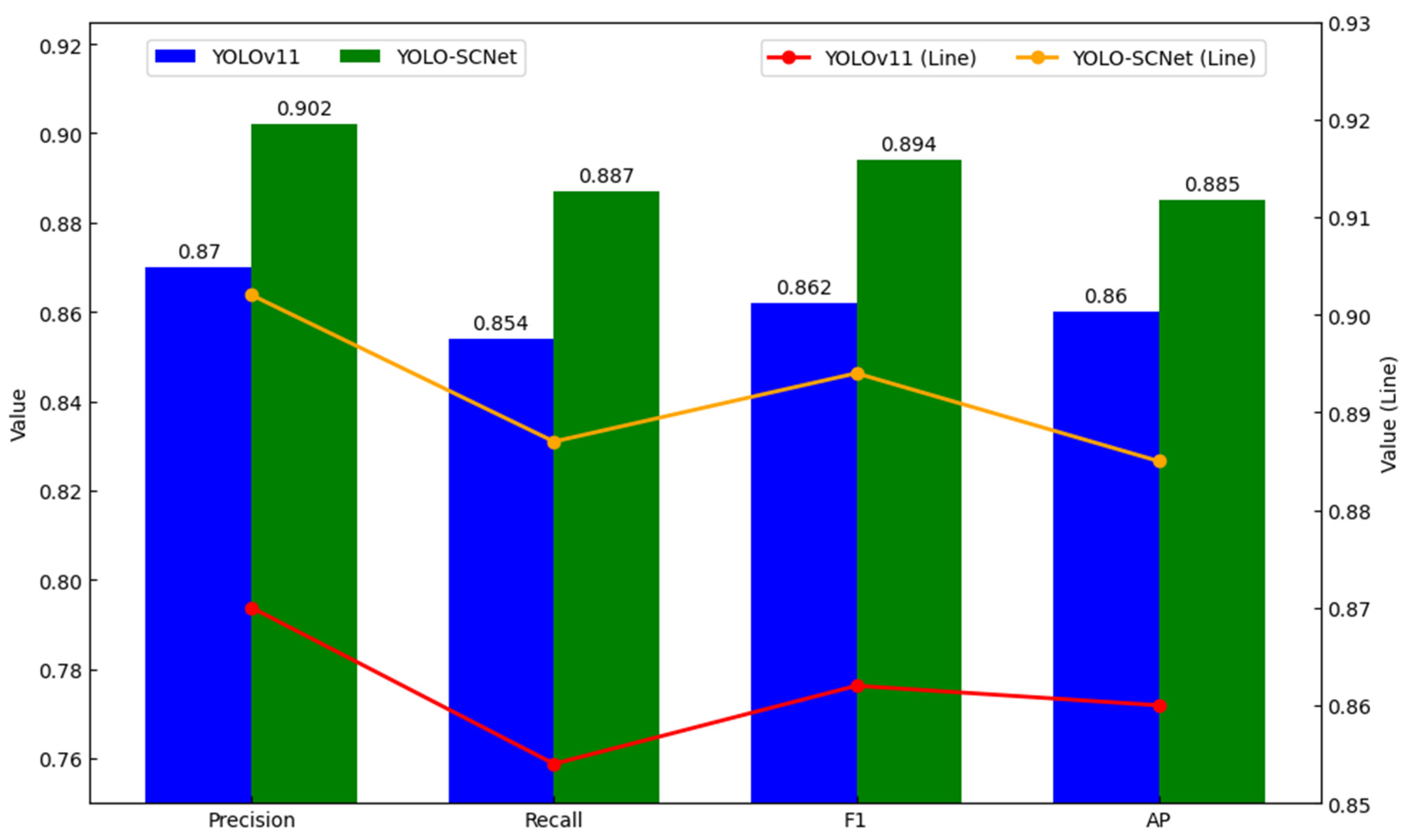
- An overall precision of 90.2%, recall of 88.7%, and F1 score of 89.4% for small craters (200–400 m), demonstrating adaptability to subtle topographical features.
- A high recall (97.2%) for database comparison tests, with the model identifying additional craters likely to refine and expand existing catalogs.
4. Analysis and Discussion
4.1. Performance and Evaluation of the Proposed Model
4.1.1. Overall Performance in Crater Detection
4.1.2. Implications of Regional Diversity in Model Evaluation
4.1.3. Performance Improvement in Small Object Detection
4.2. Comprehensive Model Performance and Stability Analysis
4.2.1. Crater Detection Accuracy
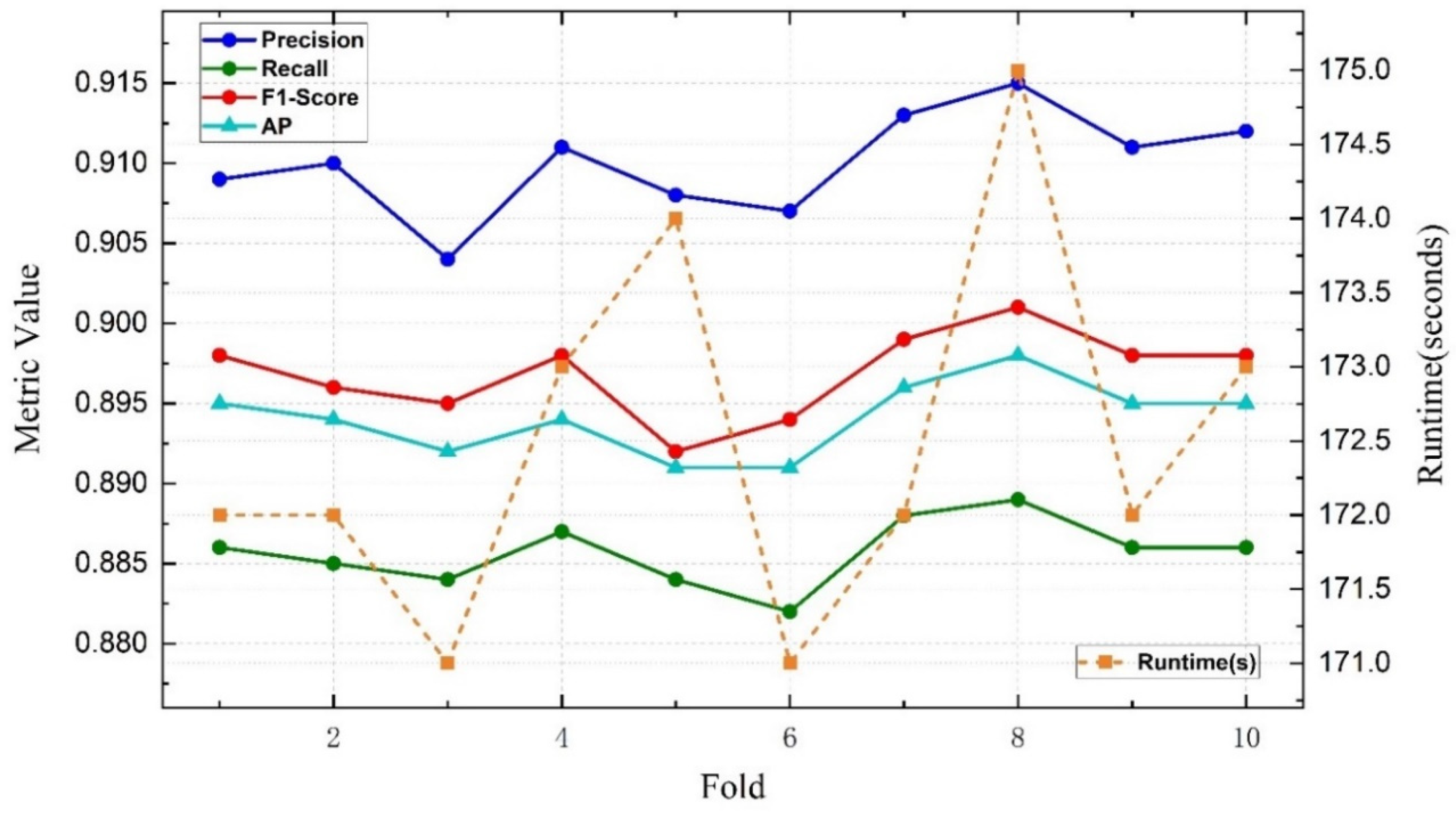
4.2.2. Robustness via Cross-Validation
4.2.3. Discussion of Combined Results
4.3. Dataset Construction and Augmentation Methods in Lunar Crater Detection
4.3.1. Importance of Dataset Construction and Its Role in Performance Improvement
- Filling Existing Database Gaps: The current lunar crater databases, such as RobbinsDB and LU1319373, primarily include craters with diameters ≥1 km. In contrast, the newly released LU5M812TGT database contains craters with diameters ≥0.4 km. While smaller craters (<200 m) are of interest, their detection and annotation often face significant challenges due to terrain complexity and resolution limitations. By targeting the 200 m–2 km range, our study addresses a critical gap in lunar crater datasets, providing new insights into medium-sized crater distributions.
- Reducing Annotation and Computational Workload: Annotating craters <200 m requires extremely high-resolution imagery and significant manual effort, while >2 km craters are typically well-documented in existing databases. The chosen range thus balances scientific value and practical feasibility.
4.3.2. Application and Effectiveness of Data Augmentation Strategies
- Highest Precision and F1 Score: Poisson Image Editing achieved the highest precision (0.915), recall (0.882), and F1 score (0.898), outperforming all other methods.
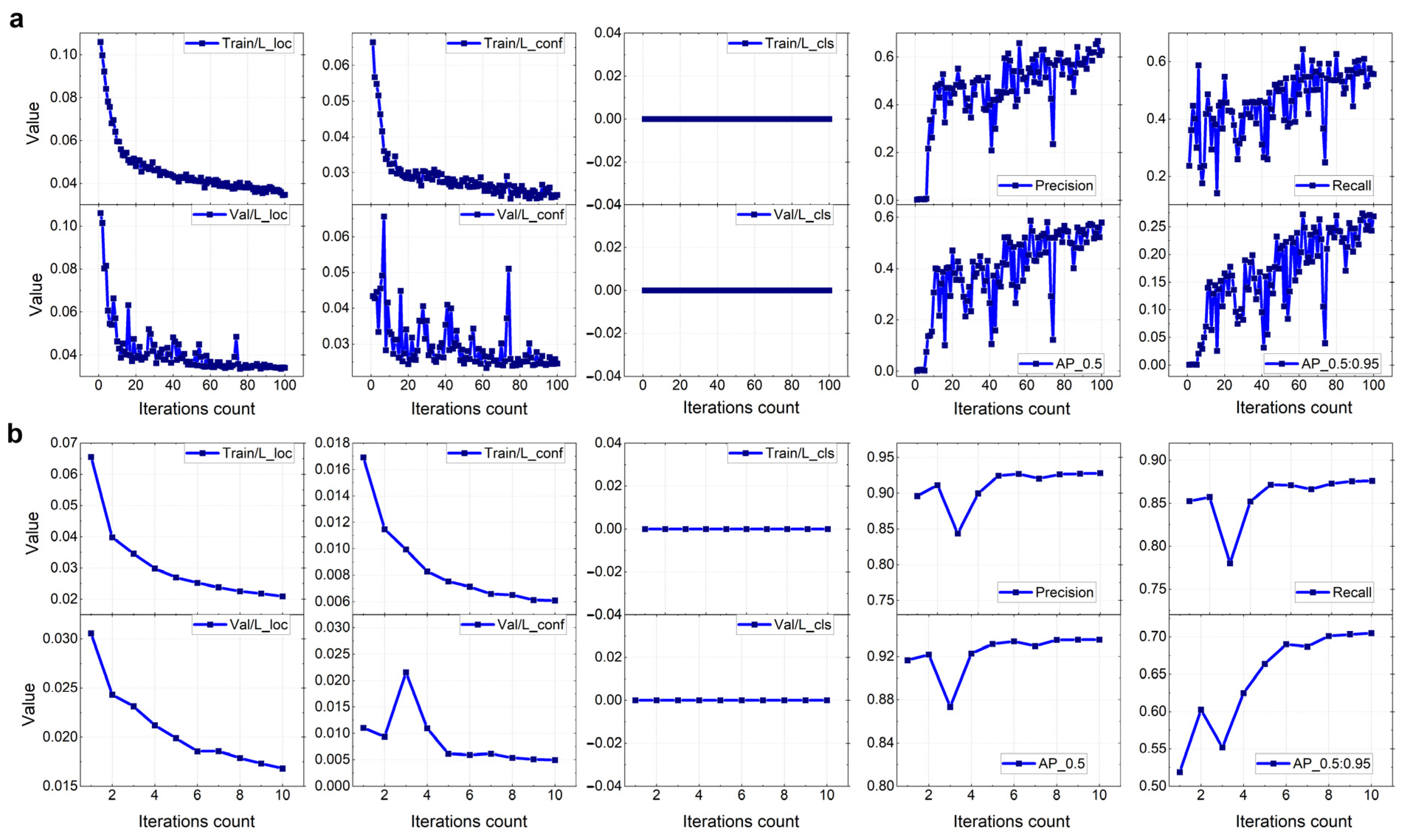
- Faster Convergence: The method required only 1000 iterations to achieve stable training, significantly faster than other methods (e.g., CutMix: 1300 iterations; rotation: 1500 iterations).
- Better Stability: Poisson Image Editing exhibited the lowest variance in metrics (±0.003), indicating consistent performance across validation folds.
4.3.3. Advantages and Scalability of Poisson Image Editing
4.3.4. Discussion and Future Directions
- (1)
- Expand the dataset to include more diverse regions and crater sizes, particularly for <200 m craters.
- (2)
- Integrate Poisson Image Editing with other advanced techniques, such as CutMix or domain adaptation, to further enhance data diversity and model robustness.
- (3)
- Explore applications beyond lunar craters, such as crater detection on Mars or other planetary surfaces, to validate the method’s generalization ability.
4.4. Comparison with Existing Methods
4.4.1. Performance Comparison
4.4.2. Comparative Analysis of Detection Methods
4.4.3. Key Advantages of Our Approach
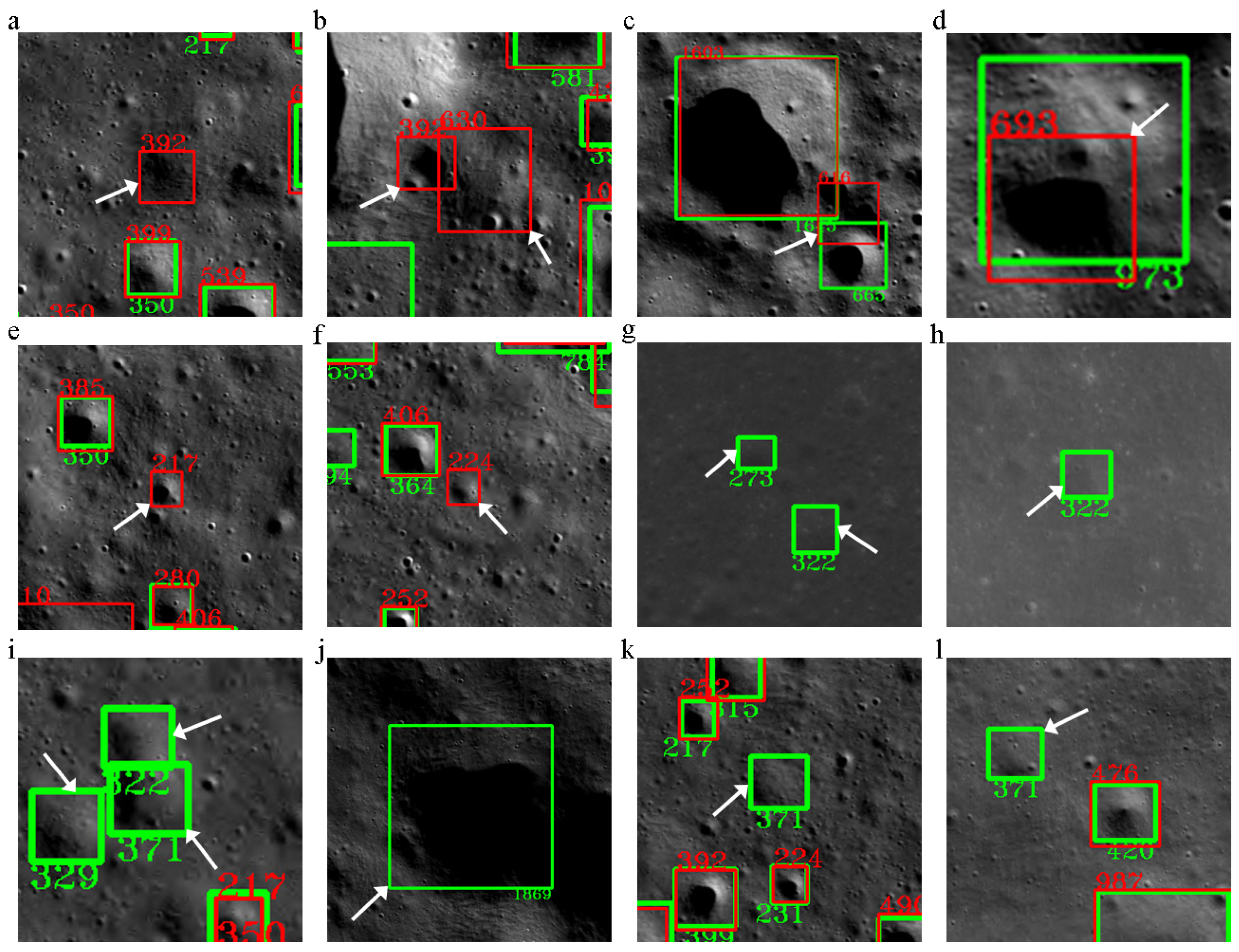
4.5. Analysis of False Positives, False Negatives, and Future Improvements
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Code Availability Section: Name of the Code/Library
References
- Head, J.W.; Fassett, C.I.; Kadish, S.J.; Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E. Global distribution of large lunar craters: Implications for resurfacing and impactor populations. Science 2010, 329, 1504–1507. [Google Scholar] [CrossRef] [PubMed]
- Fassett, C.I.; Head, J.W.; Kadish, S.J.; Mazarico, E.; Neumann, G.A.; Smith, D.E.; Zuber, M.T. Lunar impact basins: Stratigraphy, sequence and ages from superposed crater populations measured from Lunar Orbiter Laser Altimeter (LOLA) data. J. Geophys. Res. Planets 2012, 117, e2011JE003951. [Google Scholar] [CrossRef]
- Hartmann, W.K. Terrestrial and lunar flux of large meteorites in the last two billion years. Icarus 1965, 4, 157–165. [Google Scholar] [CrossRef]
- Neukum, G. Meteorite Bombardment and Dating of Planetary Surfaces; National Aeronautics and Space Administration: Washington, DC, USA, 1984.
- Michael, G. Planetary surface dating from crater size–frequency distribution measurements: Multiple resurfacing episodes and differential isochron fitting. Icarus 2013, 226, 885–890. [Google Scholar] [CrossRef]
- Martellato, E.; Vivaldi, V.; Massironi, M.; Cremonese, G.; Marzari, F.; Ninfo, A.; Haruyama, J. Is the Linné impact crater morphology influenced by the rheological layering on the Moon’s surface? Insights from numerical modeling. Meteorit. Planet. Sci. 2017, 52, 1388–1411. [Google Scholar] [CrossRef]
- Prieur, N.C.; Rolf, T.; Wünnemann, K.; Werner, S.C. Formation of simple impact craters in layered targets: Implications for lunar crater morphology and regolith thickness. J. Geophys. Res. Planets 2018, 123, 1555–1578. [Google Scholar] [CrossRef]
- Williams, J.P.; van der Bogert, C.H.; Pathare, A.V.; Michael, G.G.; Kirchoff, M.R.; Hiesinger, H. Dating very young planetary surfaces from crater statistics: A review of issues and challenges. Meteorit. Planet. Sci. 2018, 53, 554–582. [Google Scholar] [CrossRef]
- Salamunićcar, G.; Lončarić, S. Manual feature extraction in lunar studies. Comput. Geosci. 2008, 34, 1217–1228. [Google Scholar]
- Zuo, W.; Zhang, Z.; Li, C.; Wang, R.; Yu, L.; Geng, L. Contour-based automatic crater recognition using digital elevation models from Chang’E missions. Comput. Geosci. 2016, 97, 79–88. [Google Scholar] [CrossRef]
- Xiao, X.; Yao, M.; Liu, H.; Wang, J.; Zhang, L.; Fu, Y. A kernelbased multi-featured rock modeling and detection framework for a Mars rover. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 3335–3344. [Google Scholar] [CrossRef]
- Lee, C. Automated crater detection on Mars using deep learning. Planet. Space Sci. 2019, 170, 16–28. [Google Scholar] [CrossRef]
- Emami, E.; Ahmad, T.; Bebis, G.; Nefian, A.; Fong, T. Crater detection using unsupervised algorithms and convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5373–5383. [Google Scholar] [CrossRef]
- Del Prete, R.; Renga, A. A Novel Visual-Based Terrain Relative Navigation System for Planetary Applications Based on Mask R-CNN and Projective Invariants. Aerotec. Missili Spaz. 2022, 101, 335–349. [Google Scholar] [CrossRef]
- Del Prete, R.; Saveriano, A.; Renga, A. A Deep Learning-based Crater Detector for Autonomous Vision-Based Spacecraft Navigation. In Proceedings of the 2022 IEEE 9th International Workshop on Metrology for AeroSpace, Pisa, Italy, 27–29 June 2022; pp. 231–236. [Google Scholar] [CrossRef]
- Ostrogovich, L.; Del Prete, R.; Tomasicchio, G.; Longépé, N.; Renga, A. A Dual-Mode Approach for Vision-Based Navigation in a Lunar Landing Scenario. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Seattle, WA, USA, 17–18 June 2024; pp. 6799–6808. [Google Scholar]
- Silburt, A.; Ali-Dib, M.; Zhu, C.; Jackson, A.; Valencia, D.; Kissin, Y. Lunar crater identification via deep learning. Icarus 2019, 317, 27–38. [Google Scholar] [CrossRef]
- Jia, Y.; Liu, L.; Zhang, C. Moon crater detection using nested attention mechanism based UNet++. IEEE Access 2021, 9, 44107–44116. [Google Scholar] [CrossRef]
- Lin, X.; Zhu, Z.; Yu, X.; Ji, X.; Luo, T.; Xi, X.; Zhu, M.; Liang, Y. Lunar Crater Detection on Digital Elevation Model: A Complete Workflow Using Deep Learning and Its Application. Remote Sens. 2022, 14, 621. [Google Scholar] [CrossRef]
- Latorre, F.; Spiller, D.; Sasidharan, S.T.; Basheer, S.; Curti, F. Transfer learning for real-time crater detection on asteroids using a Fully Convolutional Neural Network. Icarus 2023, 394, 115434. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, P.; Yang, J.; Kang, Z.; Cao, Z.; Yang, Z. Automatic detection for small-scale lunar crater using deep learning. Adv. Space Res. 2024, 73, 2175–2187. [Google Scholar] [CrossRef]
- La Grassa, R.; Cremonese, G.; Gallo, I.; Re, C.; Martellato, E. YOLOLens: A deep learning model based on super-resolution to enhance the crater detection of the planetary surfaces. Remote Sens. 2023, 15, 1171. [Google Scholar] [CrossRef]
- La Grassa, R.; Martellato, E.; Cremonese, G.; Re, C.; Tullo, A.; Bertoli, S. LU5M812TGT: An AI-Powered global database of impact craters ≥ 0.4 km on the Moon. ISPRS J. Photogramm. Remote Sens. 2025, 220, 75–84. [Google Scholar] [CrossRef]
- Zang, S.; Mu, L.; Xian, L.; Zhang, W. Semi-supervised deep learning for lunar crater detection using ce-2 dom. Remote Sens. 2021, 13, 2819. [Google Scholar] [CrossRef]
- Mu, L.; Xian, L.; Li, L.; Liu, G.; Chen, M.; Zhang, W. YOLO-Crater Model for Small Crater Detection. Remote Sens. 2023, 15, 5040. [Google Scholar] [CrossRef]
- Haruyama, J.; Ohtake, M.; Matsunaga, T.; Morota, T.; Honda, C.; Yokota, Y.; Abe, M.; Ogawa, Y.; Miyamoto, H.; Iwasaki, A.; et al. Long-lived volcanism on the lunar farside revealed by SELENE terrain camera. Science 2009, 323, 905–908. [Google Scholar] [CrossRef]
- Yingst, R.A.; Skinner, J.A., Jr.; Beaty, D.W. Improving data sets for planetary surface analysis: An integrated approach. Planet. Space Sci. 2013, 87, 74–81. [Google Scholar] [CrossRef]
- Wetzler, P.G.; Honda, R.; Enke, B.; Merline, W.J.; Chapman, C.R.; Burl, M.C. Learning to Detect Small Impact Craters. In Proceedings of the 2005 Seventh IEEE Workshops on Applications of Computer Vision (WACV/MOTION’ 05), Breckenridge, CO, USA, 5–7 January 2005; Volume 1. [Google Scholar] [CrossRef]
- Robbins, S.J. A new global database of lunar craters >1–2 km: 1. crater locations and sizes, comparisons with published databases, and global analysis. J. Geophys. Res. Planets 2019, 124, 871–892. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, B.; Xue, H.; Li, X.; Ma, J. An improved global catalog of lunar craters (≥1 km) with 3d morphometric information and updates on global crater analysis. J. Geophys. Res. Planets 2021, 126, e2020JE006728. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Yan, W.; Zuo, W.; Mu, L.; Zhang, H.; Su, Y.; Wen, W.; Tan, X.; et al. Lunar global high-precision terrain reconstruction based on Chang’E-2 stereo images. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 485–495, (In Chinese with English Abstract). [Google Scholar]
- Zuo, W.; Li, C.; Zhang, Z.; Zeng, X.; Liu, Y.; Xiong, Y. China’s Lunar and Planetary Data System: Preserve and Present Reliable Chang’e Project and Tianwen-1 Scientific Data Sets. Space Sci. Rev. 2021, 217, 1–38. [Google Scholar] [CrossRef]
- Li, C.L.; Liu, J.J.; Mu, L.L.; Zuo, W.; Ren, X.l. The Chang’e-2 High Resolution Image Atlas of the Moon; Surveying and Mapping Press: Beijing, China, 2012. (In Chinese) [Google Scholar]
- Shorten, C.; Khoshgoftaar, T.M. A survey on Image Data Augmentation for Deep Learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Mumuni, A.; Mumuni, F. Data augmentation: A comprehensive survey of modern approaches. Array 2022, 16, 100258. [Google Scholar] [CrossRef]
- Boudouh, N.; Mokhtari, B.; Foufou, S. Enhancing deep learning image classification using data augmentation and genetic algorithm-based optimization. Int. J. Multimed. Inf. Retr. 2024, 13, 36. [Google Scholar] [CrossRef]
- Pérez, P.; Gangnet, M.; Blake, A. Poisson Image Editing. Semin. Graph. Pap. Push. Boundaries 2023, 2, 577–582. [Google Scholar] [CrossRef]
- Ghiasi, G.; Cui, Y.; Srinivas, A.; Qian, R.; Lin, T.-Y.; Le, Q.V. Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Zhang, H.; Cisse, M.; Dauphin, Y.N.; Lopez-Paz, D. mixup: Beyond Empirical Risk Minimization. In Proceedings of the International Conference on Learning Representations (ICLR), Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Yun, S.; Han, D.; Oh, S.J.; Chun, S.; Choe, J.; Yoo, Y. CutMix: Regularization Strategy to Train Strong Classifiers with Localizable Features. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Joseph, R.; Santosh, D.; Ross, G.; Ali, F. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Jaiswal, S.K.; Agrawal, R. A Comprehensive Review of YOLOv5: Advances in Real-Time Object Detection. Int. J. Innov. Res. Comput. Sci. Technol. (IJIRCST) 2024, 12, 75–80. [Google Scholar] [CrossRef]
- Khanam, R.; Hussain, M. YOLOvl1: An Overview of the Key Architectural Enhancements. arXiv 2024, arXiv:2410.17725. [Google Scholar] [CrossRef]
- Rasheed, A.F.; Zarkoosh, M. YOLOv11 Optimization for Efficient Resource Utilization. arXiv 2024, arXiv:2412.14790v2. [Google Scholar] [CrossRef]
- Jocher, G.; Chaurasia, A.; Qiu, J. YOLO by Ultralytics. 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 14 April 2023).
- He, Z.J.; Wang, K.; Fang, T.; Su, L.; Chen, R.; Fei, X.H. Comprehensive Performance Evaluation of YOLOv11, YOLOv10, YOLOv9, YOLOv8 and YOLOv5 on Object Detection of Power Equipment. arXiv 2024, arXiv:2411.18871. [Google Scholar] [CrossRef]
- Povilaitis, R.; Robinson, M.; van der Bogert, C.; Hiesinger, H.; Meyer, H.; Ostrach, L. Crater density differences: Exploring regional resurfacing, secondary crater populations, and crater saturation equilibrium on the moon. Planet Space Sci. 2017, 162, 41–51. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region No. | Region Name | Regional Characteristics | Sub-Region No. | Sub-Region Characteristics |
|---|---|---|---|---|
| I | Lunar Polar Regions | Intricate terrain with rugged mountains and abundant craters. Lower albedo near poles, brighter in surrounding areas. | I-1 | Brighter surface with numerous small craters exhibiting black and white wart structures. |
| I-2 | Low albedo near poles; larger craters with central stacks. | |||
| II | High-Latitude Highlands | Dramatic topographic changes with high reflectivity; larger and more complex craters. | II-1 | Dark surface with lowest albedo among similar regions. |
| II-2 | Small amount of ejecta material; crater edges are blunted. | |||
| II-3 | Bright surface covered by ejecta material; highest albedo among similar regions. | |||
| III | Mid-/Low-Latitude Highlands | Undulating terrain; crater morphology altered by volcanic activity and lava flows. | III-1 | Complex craters are common; some craters are covered by lava flows. |
| III-2 | Some regions covered by bright ejecta; higher reflectivity than similar areas. | |||
| IV | Lunar Mare Regions | Flat basaltic regions with low reflectivity; circular or elliptical craters with distinct edges. | IV-1 | Highest reflectivity among similar areas; flat-bottomed craters. |
| IV-2 | Distributed on the near side; dark surface with lowest reflectivity among similar areas. | |||
| IV-3 | Distributed on the far side; circular craters with distinct edges. |
| Map Subdivison Code | Sub-Region No. | Image Dimensions | Area of Map Subdivision (km2) | Split Images Number | Labeled Crater Number | Predicted Crater Number | TP (IoU ≥ 0.5) | FP | FN | P | R | F1 | AP | Operating Speed |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1-02 | II-1 | 34,877 × 29,601 | 50,587.31 | 1050 | 5719 | 5523 | 5020 | 503 | 699 | 0.909 | 0.882 | 0.895 | 0.897 | 3′32″ |
| D2-13 | IV-2 | 28,539 × 28,521 | 39,884.08 | 841 | 3404 | 3273 | 2975 | 298 | 429 | 0.910 | 0.885 | 0.897 | 0.883 | 2′12″ |
| F1-04 | III-2 | 31,239 × 32,454 | 49,677.69 | 1056 | 3859 | 3727 | 3360 | 367 | 499 | 0.904 | 0.875 | 0.889 | 0.869 | 3′22″ |
| K1-36 | IV-3 | 28,539 × 28,521 | 39,884.08 | 841 | 3616 | 3475 | 3170 | 305 | 446 | 0.913 | 0.878 | 0.895 | 0.884 | 3′09″ |
| N021 | I-2 | 29,056 × 29,056 | 41,368.31 | 900 | 5487 | 5281 | 4790 | 491 | 697 | 0.911 | 0.881 | 0.895 | 0.877 | 2′52″ |
| S014 | I-1 | 29,055 × 29,056 | 41,368.31 | 841 | 2485 | 2388 | 2170 | 218 | 315 | 0.909 | 0.879 | 0.894 | 0.885 | 2′07″ |
| Average | 30,218 × 29,535 | 43,794.96 | 922 | 4095 | 3935 | 3581 | 364 | 514 | 0.909 | 0.880 | 0.894 | 0.883 | 2′52″ | |
| Map Subdivison Code | Sub-Region No. | Image Dimensions | Area of the Testing Range (km2) | Split Images Number | Labeled Crater Number | Predicted Crater Number | TP (IoU ≥ 0.5) | FP | FN | P | R | F1 | AP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1-02 | II-1 | 6560 × 6560 | 150.62 | 18 | 414 | 411 | 371 | 40 | 43 | 0.903 | 0.896 | 0.899 | 0.882 |
| D2-13 | IV-2 | 6560 × 6560 | 150.62 | 18 | 378 | 371 | 332 | 39 | 46 | 0.895 | 0.878 | 0.887 | 0.89 |
| F1-04 | III-2 | 8560 × 6560 | 196.54 | 24 | 528 | 519 | 468 | 51 | 60 | 0.902 | 0.886 | 0.894 | 0.885 |
| K1-36 | IV-3 | 6560 × 6560 | 150.62 | 18 | 588 | 581 | 522 | 59 | 66 | 0.898 | 0.887 | 0.893 | 0.872 |
| N021 | I-2 | 6560 × 6560 | 150.62 | 18 | 951 | 927 | 839 | 88 | 112 | 0.905 | 0.882 | 0.894 | 0.895 |
| S014 | I-1 | 6560 × 6560 | 150.62 | 18 | 694 | 687 | 621 | 66 | 73 | 0.904 | 0.895 | 0.899 | 0.883 |
| Average | 6893 × 6893 | 158.27 | 19 | 592 | 582 | 525 | 57 | 67 | 0.902 | 0.887 | 0.894 | 0.885 | |
| Map Subdivison Code | Crater Catalog | Crater Diameter Range | Crater Number | Predicted Crater Number | TP (IoU ≥ 0.5) | FP | FN | P | R | F1 |
|---|---|---|---|---|---|---|---|---|---|---|
| F1-04 | RobbinsDB | [1 km, 2 km] | 902 | 1112 | 880 | 232 | 22 | 0.791 | 0.976 | 0.874 |
| K1-36 | RobbinsDB | [1 km, 2 km] | 703 | 1131 | 685 | 446 | 18 | 0.606 | 0.974 | 0.747 |
| F1-04 | LU1319373 | [1 km, 2 km] | 959 | 1112 | 927 | 185 | 32 | 0.834 | 0.967 | 0.895 |
| K1-36 | LU1319373 | [1 km, 2 km] | 773 | 1131 | 746 | 385 | 27 | 0.660 | 0.965 | 0.784 |
| F1-04 | LU5M812TGT | [0.4 km, 2 km] | 4217 | 7946 | 4157 | 3789 | 94 | 0.523 | 0.978 | 0.682 |
| K1-36 | LU5M812TGT | [0.4 km, 2 km] | 3660 | 5835 | 3562 | 2273 | 99 | 0.610 | 0.973 | 0.750 |
| Average | 1869 | 3045 | 1826 | 1218 | 49 | 0.671 | 0.972 | 0.789 | ||
| Map Subdivison Code | Sub-Region No. | Image Dimensions | Area of the Testing Range (km2) | Split Images Number | Labeled Crater Number | Predicted Crater Number | TP (IoU ≥ 0.5) | FP | FN | P | R | F1 | AP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1-02 | II-1 | 6560 × 6560 | 150.62 | 18 | 414 | 396 | 345 | 51 | 54 | 0.871 | 0.865 | 0.868 | 0.850 |
| D2-13 | IV-2 | 6560 × 6560 | 150.62 | 18 | 378 | 371 | 322 | 49 | 60 | 0.868 | 0.843 | 0.855 | 0.855 |
| F1-04 | III-2 | 8560 × 6560 | 196.54 | 24 | 528 | 500 | 436 | 64 | 76 | 0.872 | 0.852 | 0.862 | 0.860 |
| K1-36 | IV-3 | 6560 × 6560 | 150.62 | 18 | 588 | 565 | 492 | 73 | 77 | 0.871 | 0.865 | 0.868 | 0.860 |
| N021 | I-2 | 6560 × 6560 | 150.62 | 18 | 951 | 887 | 771 | 116 | 140 | 0.869 | 0.846 | 0.858 | 0.860 |
| S014 | I-1 | 6560 × 6560 | 150.62 | 18 | 694 | 623 | 541 | 82 | 91 | 0.868 | 0.856 | 0.862 | 0.865 |
| Average | 6893 × 6893 | 158.27 | 19 | 592 | 557 | 485 | 73 | 83 | 0.870 | 0.854 | 0.862 | 0.860 | |
| Fold | P | R | F1 | AP | Runtime (s) |
|---|---|---|---|---|---|
| 1 | 0.909 | 0.886 | 0.898 | 0.895 | 172 |
| 2 | 0.910 | 0.885 | 0.896 | 0.894 | 172 |
| 3 | 0.904 | 0.884 | 0.895 | 0.892 | 171 |
| 4 | 0.911 | 0.887 | 0.898 | 0.894 | 173 |
| 5 | 0.908 | 0.884 | 0.892 | 0.891 | 174 |
| 6 | 0.907 | 0.882 | 0.894 | 0.891 | 171 |
| 7 | 0.913 | 0.888 | 0.899 | 0.896 | 172 |
| 8 | 0.915 | 0.889 | 0.901 | 0.898 | 175 |
| 9 | 0.911 | 0.886 | 0.898 | 0.895 | 172 |
| 10 | 0.912 | 0.886 | 0.898 | 0.895 | 173 |
| Mean | 0.909 | 0.886 | 0.897 | 0.894 | 172 |
| Std | ±0.003 | ±0.003 | ±0.003 | ±0.003 | ±2 |
| Augmentation Method | P | R | F1 | AP | Convergence Iterations | Variance in Metrics | Average Processing Time (ms/image) |
|---|---|---|---|---|---|---|---|
| Rotation | 0.878 | 0.856 | 0.867 | 0.852 | 1500 | ±0.007 | 1.2 |
| Scaling | 0.882 | 0.861 | 0.871 | 0.859 | 1400 | ±0.006 | 1.3 |
| Flipping | 0.885 | 0.863 | 0.874 | 0.860 | 1350 | ±0.006 | 0.9 |
| CutMix | 0.892 | 0.870 | 0.881 | 0.869 | 1300 | ±0.005 | 2.5 |
| Poisson Image Editing (Proposed) | 0.915 | 0.882 | 0.898 | 0.889 | 1000 | ±0.003 | 5.8 |
| Reference | Detection Method | Data Source | P | R | F1 | Sample Dataset | Crater Diameter |
|---|---|---|---|---|---|---|---|
| Silburt et al. 2019 [17] | UNET | SLDEM/~59 m | 56.0% | 92.0% | 69.6% | Head 2010 [1] Povialaitis, 2018 [47] | ≥5 km |
| Jia et al., 2021 [18] | UNET++ | SLDEM/~59 m | 85.6% | 79.1% | 82.2% | ≥5 km | |
| Lin et al., 2022 [19] | Faster R-CNN + FPN | SLDEM/~59 m | 82.9% | 79.4% | 81.0% | ≥5 km | |
| Latorre et al., 2023 [20] | transfer learning, UNET + FCNs | SLDEM/~118 m | 83.8% | 84.5% | 84.1% | ≥5 km | |
| La Grassa et al., 2023 [22] | YOLOLens5x | LROC-WAC/100 m | 89.9% | 87.2% | 88.5% | ~26,538 labelled crater from Robbin’s database | ≥1 km |
| Zhang et al., 2024 [21] | CenterNet model using a transfer learning strategy | LROC-WAC/100 m | 78.3% | 73.7% | 76.0% | RobbinsDB [29] | ≥500 m |
| La Grassa et al. 2025 [23] | YOLOLens (YOLOv8) | LROC-WAC/100 m/50 m | 85.2% | 15,408,735 non-unique crater labels | ≥400 m | ||
| Mu et al., 2023 [25] | YOLO-Crater | CE-2 DOM/7 m | 87.9% | 66.0% | 75.4% | 83,620 manual labelled crater samples | ~400 m |
| Zang et al., 2021 [24] | R-CNN | CE-2 DOM/7 m | 90.5% | 63.5% | 74.7% | 38,121 manual labelled crater samples | ≥100 m |
| This study | YOLO-SCNet (YOLOv11) | CE-2 DOM/7 m | 90.2% | 88.7% | 89.4% | 80,607 crater samples data (generated by the sample production method proposed in this study) | [0.2 km, 2 km] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, W.; Gao, X.; Wu, D.; Liu, J.; Zeng, X.; Li, C. YOLO-SCNet: A Framework for Enhanced Detection of Small Lunar Craters. Remote Sens. 2025, 17, 1959. https://doi.org/10.3390/rs17111959
Zuo W, Gao X, Wu D, Liu J, Zeng X, Li C. YOLO-SCNet: A Framework for Enhanced Detection of Small Lunar Craters. Remote Sensing. 2025; 17(11):1959. https://doi.org/10.3390/rs17111959
Chicago/Turabian StyleZuo, Wei, Xingye Gao, Di Wu, Jiaqian Liu, Xingguo Zeng, and Chunlai Li. 2025. "YOLO-SCNet: A Framework for Enhanced Detection of Small Lunar Craters" Remote Sensing 17, no. 11: 1959. https://doi.org/10.3390/rs17111959
APA StyleZuo, W., Gao, X., Wu, D., Liu, J., Zeng, X., & Li, C. (2025). YOLO-SCNet: A Framework for Enhanced Detection of Small Lunar Craters. Remote Sensing, 17(11), 1959. https://doi.org/10.3390/rs17111959