The drone and flux chamber measurements were recorded via methods that do not return completely comparable results. Specifically, the CH4 observations acquired from the drone-mounted sensor return a concentration, expressed in ppmv * m, representing the CH4 concentration along the column of air (traversed by the TDLAS laser beam) between the ground and the sensor (at a height of approximately 10 m). With the flux chambers, the flux of CO2 and CH4, expressed as moles/m2/d−1, was measured directly at the soil–atmosphere interface.
A non-negligible disturbance component, related to different factors (e.g., ambient variability of the background, wind speed, and instrumental error), is expected for the measurements taken via drone in the above-mentioned terrain–drone air column, where the escaping gas from the surface mixes with the atmosphere. On the other hand, acquisition from drone-mounted sensors allows the acquisition of thousands of readings in a very brief time span at extremely low cost. In addition, it is important to highlight that the measurements taken with a flux chamber are point-specific and more representative of the actual emission “signal”; however, it is also known that the flux of volatiles is extremely variable in space and time.
The following paragraphs describe in detail the results of the data processing.
4.2. Spatial Distribution of Raw Data
The distribution of values acquired by the drone and flux chamber is represented in
Figure 3 (areas A1 and B) and
Figure 4 (Area C). To highlight the areas with higher values of drone surveys, the raw observations (ROs) were classified into three classes, as follows:
Values below the 25th percentile (P25);
Values between the 25th and 90th percentiles (P25-P90);
Values between the 90th and 100th percentiles (P90-max).
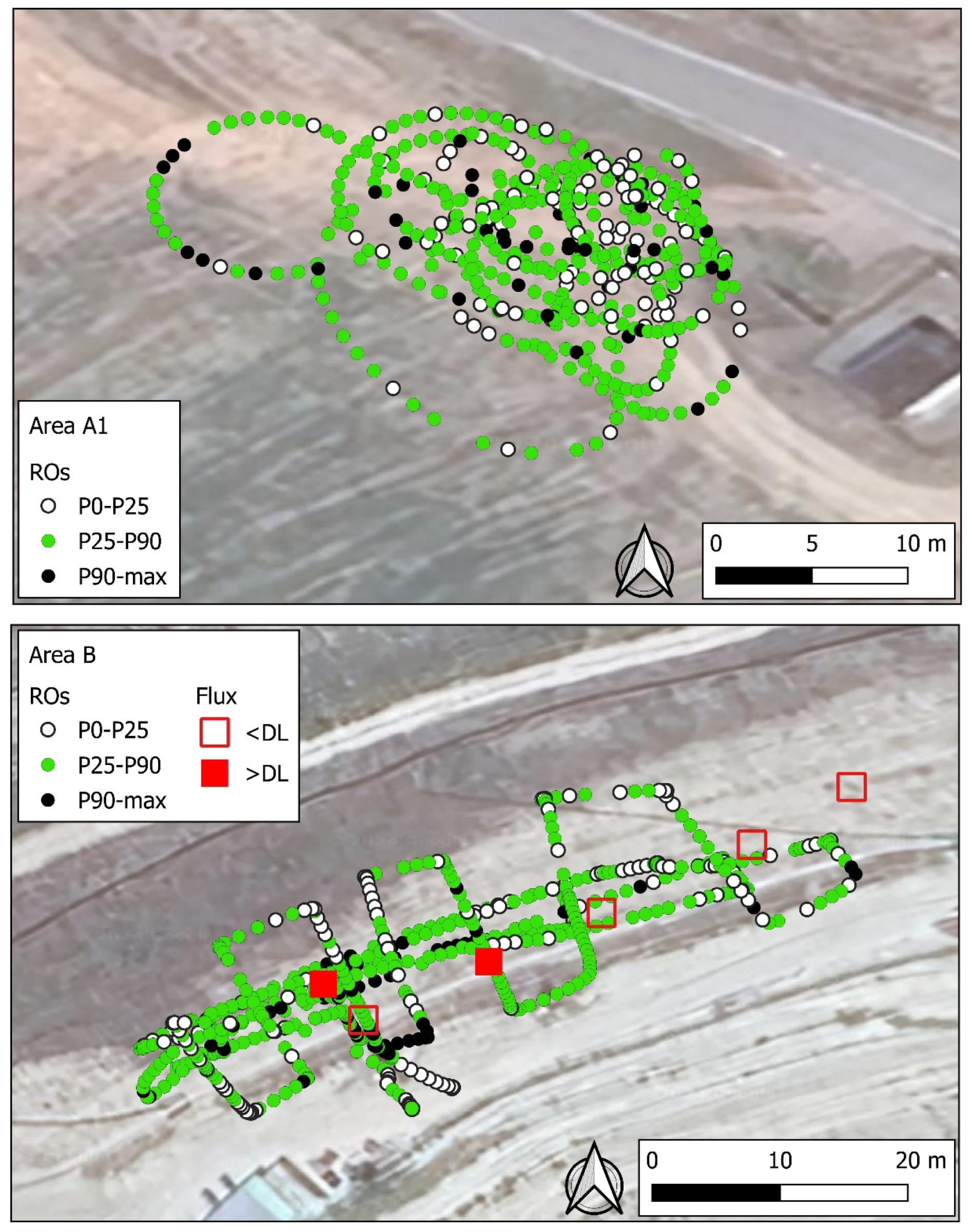
In Area A1, RO values greater than P90 identify no spatial structures. No flux measurements were made with the flux chamber in this area.
In Area B, several observations exceeding P90 (i.e., values greater than 57 ppm * m) seem to be clustered in a small portion of the area, approximately in correspondence with the only two methane flux measurements exceeding the detection limit (
Figure 3, bottom). It can be observed that the distance between the flux chamber measurement points and the point with the highest drone-measured values is only a few meters. However, within these few meters, there are also numerous observations with relatively low values; therefore, the relationships between the two types of measurements are not fully clear.
Figure 3.
Spatial distribution of CH4 (ppm * m) in Area A1 (top) and Area B (bottom). In Area B, the results of CH4 flux (mol/m2/d) measured by the flux chamber are also reported.
Figure 3.
Spatial distribution of CH4 (ppm * m) in Area A1 (top) and Area B (bottom). In Area B, the results of CH4 flux (mol/m2/d) measured by the flux chamber are also reported.
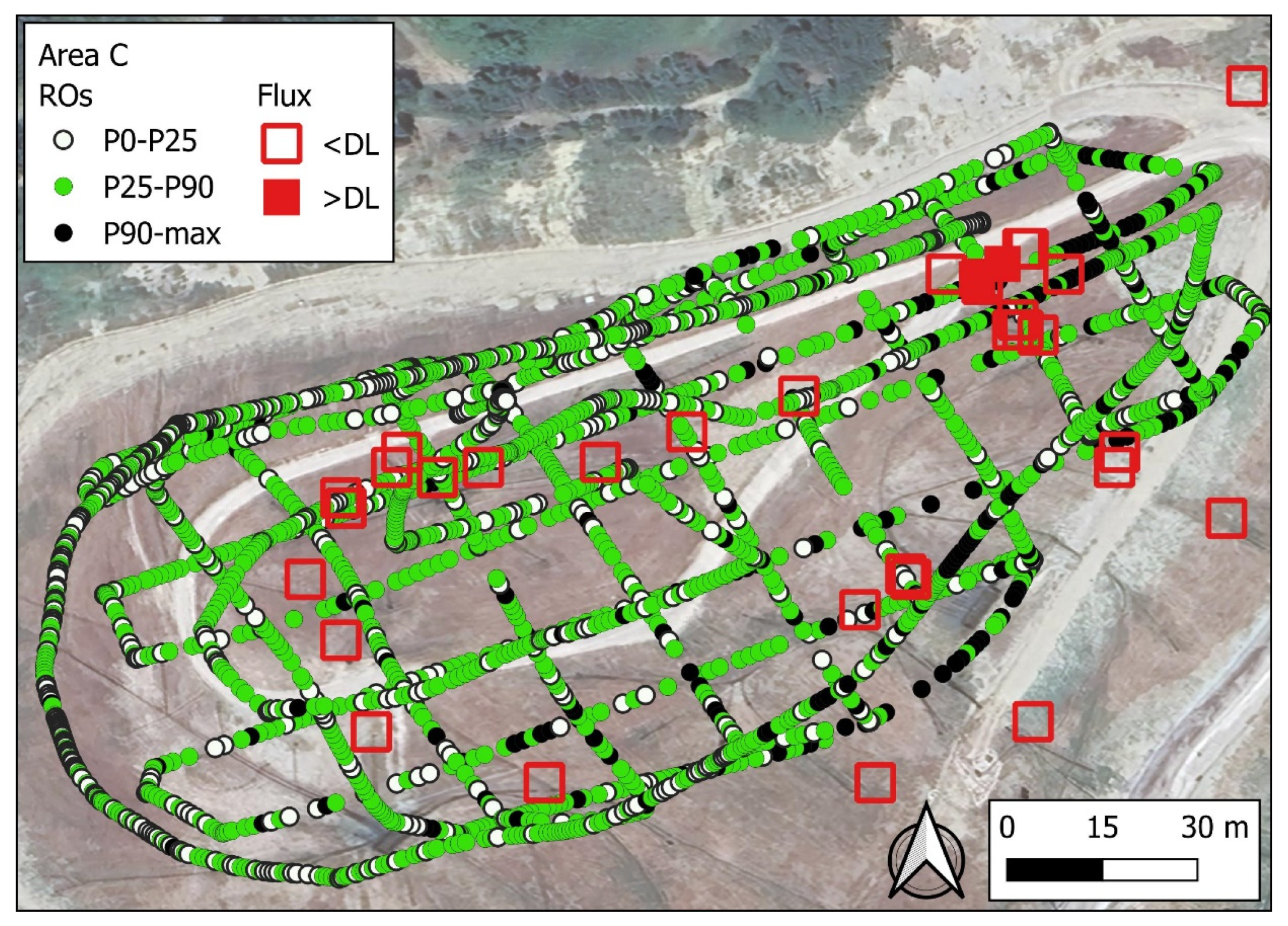
Figure 4.
Spatial distribution of CH4 (ppm * m) in Area C. The results of CH4 flux (mol/m2/d) measured by the flux chamber are also reported.
Figure 4.
Spatial distribution of CH4 (ppm * m) in Area C. The results of CH4 flux (mol/m2/d) measured by the flux chamber are also reported.
The situation is more complex in Area C, the main area of investigation (
Figure 4). In the northern and western sectors, the values measured by the drone are relatively low. In other areas of the site, along the measurement acquisition path, the values are extremely variable over very small distances (about a few tens of centimeters). Overall, it is quite difficult to identify spatial structures in the CH
4 distribution that can be correlated with the flux measurements. Out of 36 flux measurements, only two showed measurable values, while the rest were below the detection limit (DL).
4.3. Organization and Results of CH4 Drone-Derived Data
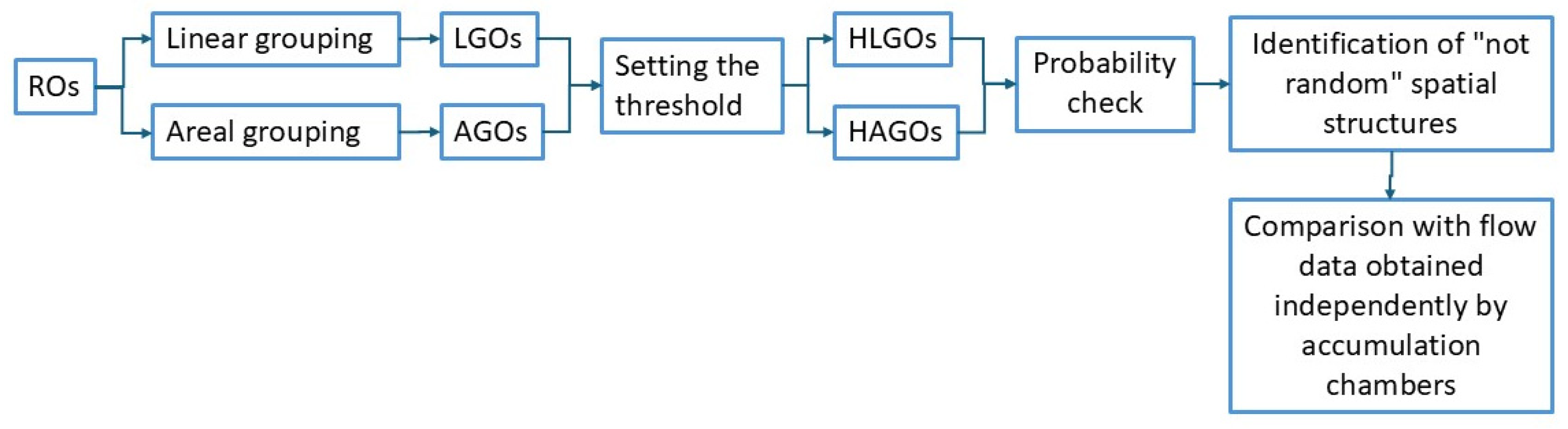
Individual raw observations (ROs) collected by the drone show a certain degree of randomness due to sensor errors and, mostly, complex acquisition conditions. To make the data informative and reliable, it is therefore necessary to develop a method of processing the data that highlights the spatial structure of CH4 distribution. The surveying of CH4 spatial structures of emission points/areas is based on two criteria, as follows:
Spatial contiguity: the spatial structure is given by the contiguity of two or more points (or spatial elements) that show values above a certain threshold (binary approach);
Low probability of randomness: the spatial contiguity of two or more elements exceeding the threshold must have a low probability of being random.
Ultimately, the probability of the contiguity of several points (or spatial elements) not being random regulates the identification of the threshold and the number of contiguous elements that define that structure.
These criteria were used to process the data, according to two different approaches: (i) a “linear” analysis between observations acquired at successive times and points of the drone’s trajectory, and (ii) a 2D “spatial” analysis, where raw observations were grouped in hexagonal cells (
Figure 5).
The “linear” analysis: this method involves grouping ROs (taken in the same spatial and temporal order as detected) into sets of 11 and calculating the P75 for each group. Additionally, the coordinates of the central point within each group (i.e., the coordinates of the sixth observation) are assigned. The original number of n ROs is thus reduced to n/11 (which will be referred to herein as the “linear grouped observations”, LGOs). A threshold value (TV) is set; here, the TV is the P90 of the values (P75 of GOs) assigned to the LGOs. The TV splits the grouped observations into two sets: (i) grouped observations lower than the TV (90% of LGOs), and (ii) grouped observations higher than the TV (i.e., 10% of grouped observations, HLGOs).
The results of linear grouping for areas C, B, and A1 are shown in
Figure 6 and
Figure 7.
According to combinatorial calculation, the probability of randomly obtaining a series x of consecutive (adjacent) HLGOs, given
n as the total number of LGOs and h as the number of HLGOs, is given by:
Referring to the data from Area C, it can be seen that the approximately 2550 ROs (see
Table 6) are reduced to 232 LGOs (2552/11). Assuming the TV is the P90 of the values assigned to all LGOs (i.e., the P75 value of the 11 ROs forming an LGO), 22 HLGOs are obtained. In the same area, the 22 HLGOs define two sets of four adjacent HLGOs and four sets of two adjacent HLGOs. In
Figure 6, the adjacent HLGOs are connected by lines to better recognize them.
The next step is to evaluate if these “HLGO lineaments” may be due to chance. Applying equation [
4], the following probability values (p_val%) are obtained (
Table 8):
The lower the p_val%, the lower the probability that the contiguity of x HLGOs will occur by chance. Contextually, the higher chance of the contiguity of x HLGOs is due to a spatial control factor. In Area C, the lowest values of p_val%, (0.0062%) are related to two sets of 4 adjacent HLGOs that therefore can rightly be considered correlated with an emissive source of CH
4. This conclusion is supported by the flux measurements. In fact, the only two flux measures exceeding the DL (solid red squares,
Figure 6) are situated near the linear structures identified by the proposed data processing. The spatial structure formed by only two adjacent HLGOs has a probability of being generated by chance greater than 0.5%. Consequently, there is lower confidence that these spatial structures could be linked to actual emissive phenomena.
The same procedure was applied to areas A1 and B. The results are shown in
Figure 7. In each area, only one lineament formed by two adjacent HLGOs was found. These lineaments have a probability of being generated by chance greater than 0.5 (p_val% > 0.5); therefore, they are considered not fully reliable.
The “2D” spatial analysis: In this case, the grouping of ROs was related to a regular hexagonal grid. The hexagonal shape was selected as the most isotropic form. The entirety of Area C was subdivided into 104 hexagons with an apothem of approximately 9 m. The ROs included in each hexagon were grouped into an AGO (areal grouped observation). Unlike LGOs, each AGO consists of a different number of ROs, and its graphical representation consists of a hexagon and not a point.
Subsequently, various attributes were assigned to each AGO, as follows:
ID number;
num_obs: Number of ROs forming each AGO. Moreover, to ensure the reliability of the statistical attributes assigned to each AGO, a “percentage of coverage” was computed, given by the ratio between the number of ROs in the i-AGO and the maximum number of ROs in an AGO * 100. In
Figure 8, the percentage of coverage for each AGO is reported. As can be observed, some AGOs consist of only two ROs, while others have up to a maximum of 90 ROs;
Main statistics of ROs falling in each single AGO (mean, st_dev, P25, median, P75, P95, max).
While the CH4 concentration value (ppm * m) assigned to each LGO is given by the P75 of the ROs forming that LGO, the value assigned to each AGO is given by the average of the ROs (this is because in some AGOs, the number of ROs is very small, so it would not be appropriate to refer to percentiles).
As in the linear analysis, the HAGOs are referenced as the AGOs exceeding the TV, which is set as the P90 of the values assigned to the AGOs (i.e., HAGOs are the top 10% of all AGOs).
In
Figure 9, the outcomes of this processing are shown for Area C. Each hexagon was assigned the corresponding value of the AGOs. The TV is set as the P90 of all 104 AGO values. The AGOs exceeding the TV are referred to as HAGOs (in red). There are two clusters of HAGOs (n. 123-132-141-142-143 and 126-127-136). HAGOs n. 68, 145, and 164 are excluded from consideration, as they do not represent a cluster (they are not bordered by other HAGOs). The LISA (local indicator of spatial association; [
36]) approach has been adopted to check if the observed clustering is casual or not. LISA provides a way to analyze spatial autocorrelation at the local level, allowing for the identification of local clusters, spatial outliers, and patterns that might not be apparent when examining the data globally. In particular, when a binary parameter is being investigated, the local joint count (LJC) indicator helps to understand how likely it is that the clustering occurred by chance. The evaluation of HAGO clustering involves the calculation of a pseudo-probability value, pp_val%, which is an estimate based on the number of random permutations rather than being calculated analytically. Therefore, pp_val% is not perfectly comparable to the p_val%, which is analytically calculated for assessing the HLGO clusters. The higher the number of permutations, the closer the pseudo-probability will be to a theoretical probability. In any case, similar to p_val, the lower pp_val is, the higher the chance that clustering around the ith element is due to a “control factor” governing the spatial distribution of the examined parameter. pp_val% calculations were made using the free and open-source software GeoDa 1.22.0.8 2024 version.
Table 9 reports the results of the LJC analysis for Area C.
In
Figure 10, the hexagons indicating a JC number that is not attributable to random circumstances (i.e., with pp_val < 5%) are highlighted in yellow. Among these, hexagons 142 and 132 (pp_val near 1%) stand out, essentially coinciding with the area where a higher CH
4 flux than the DL was measured. For hexagons 127 and 136, located in the southern margin of the investigated area, the pp_val% calculation is possibly affected by the edge effect, as discussed below.
Analogous data processing was conducted for Area B (the active filling area, without capping). In this case, since the area is quite small (approximately 60 × 30 m), it was necessary to resize the areal units (hexagons with an apothem of about 2.5 m). A total of 60 hexagons (and therefore 60 AGOs) were obtained. The mean of the CH
4 values of the ROs was assigned to AGO. The clustering of HAGOs is shown in
Figure 11. As can be seen in the figure, the only two CH
4 flux values above the DL (which are also quite high, at 9.2 and 5.3 mol/m
2/g, respectively) correspond to, or are in the immediate vicinity of (with distances less than 1.5 m), the HAGOs. Similar considerations apply to CO
2 fluxes (the two highest CO
2 values correspond to the points with the highest CH
4 flux).
Also in Area B, for each HAGO bordered by one or more HAGOs, the probabilities were calculated for the clustering to be a random result. Values of pp_val less than 5% were found in HAGO n. 61 (i.e., clustering around this hexagon was supposed to be non-random). The flux measurement inside this hexagon was lower than the DL; however, another flux measurement 3–4 m from hexagon 61 exceeded the DL.
In the background Area A1 (not represented in the figure), only three non-clustered HAGOs were found. This result is possibly due to a) a poor dataset, b) the limited area investigated, and c) the lack of a CH4 emission “structure”. In the A1 area, no CH4 flux measurements are available.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}